A Miniature Binocular Endoscope with Local Feature Matching and Stereo Matching for 3D Measurement and 3D Reconstruction

Abstract
1. Introduction
2. Methods
2.1. System Principle and Composition
2.1.1. Principle of Binocular Stereo Vision
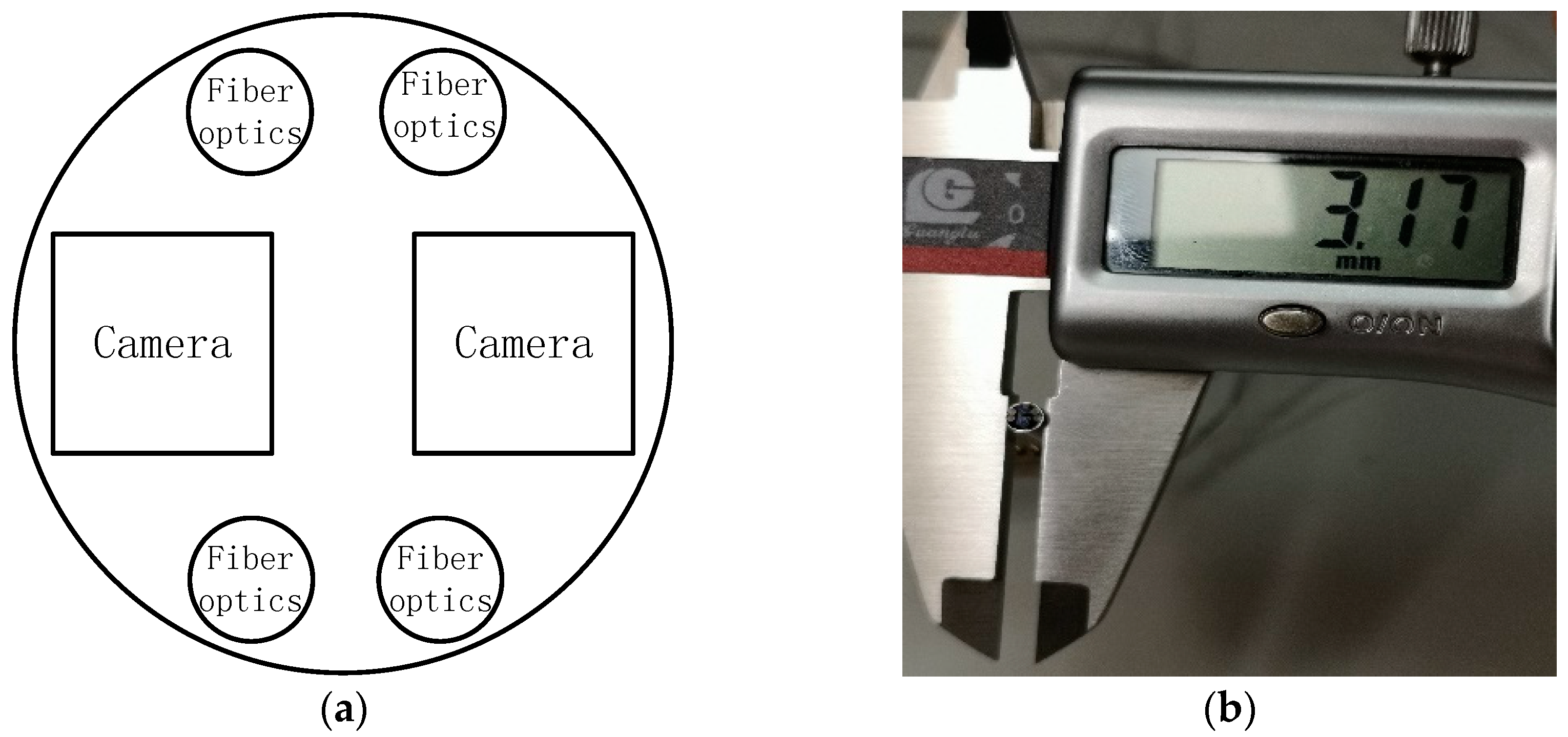
2.1.2. Structure of Probe
2.2. Local Feature Descriptor
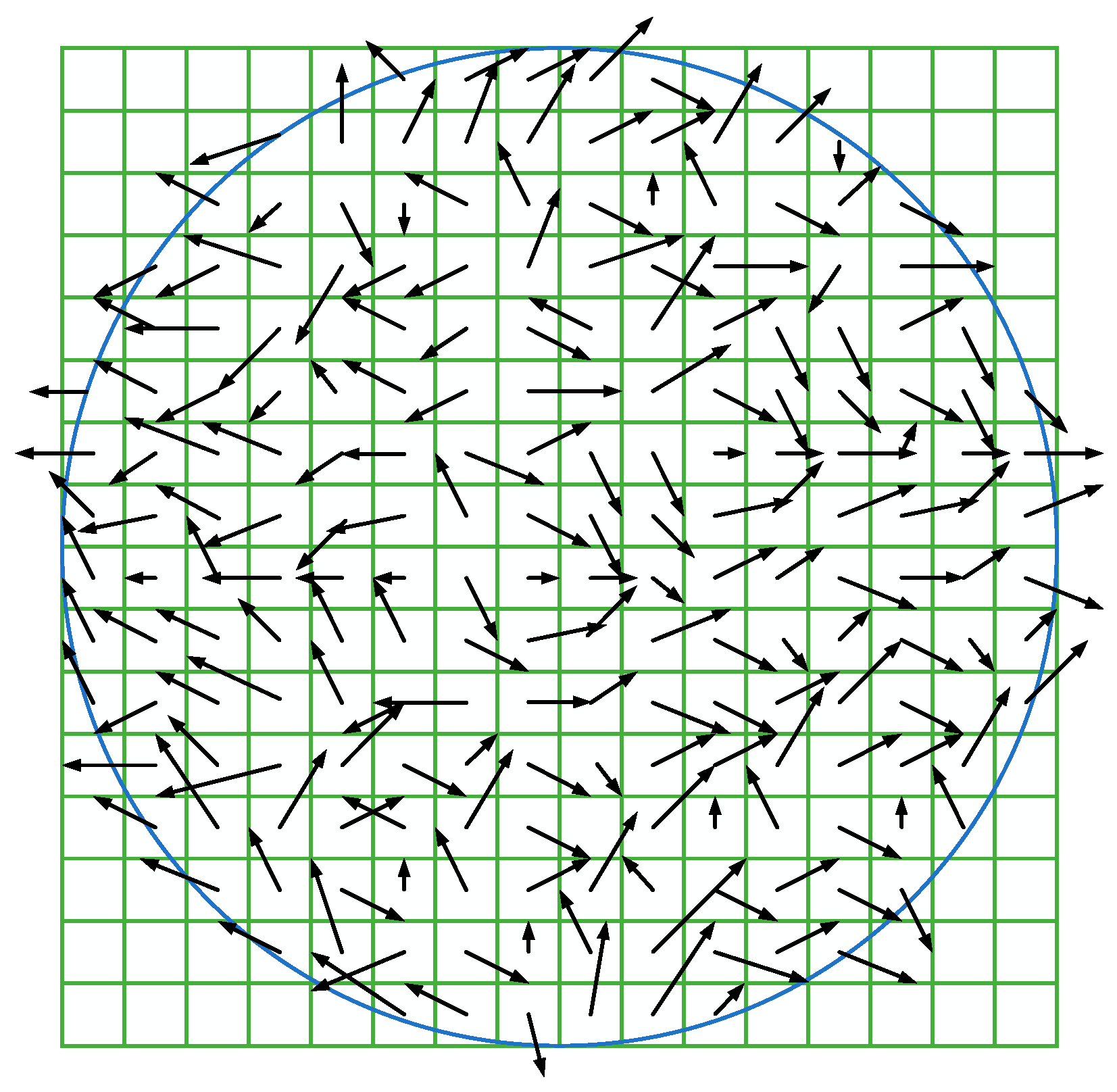
2.2.1. Main Orientation Extraction
2.2.2. Construction and Matching of the Local Feature Descriptor
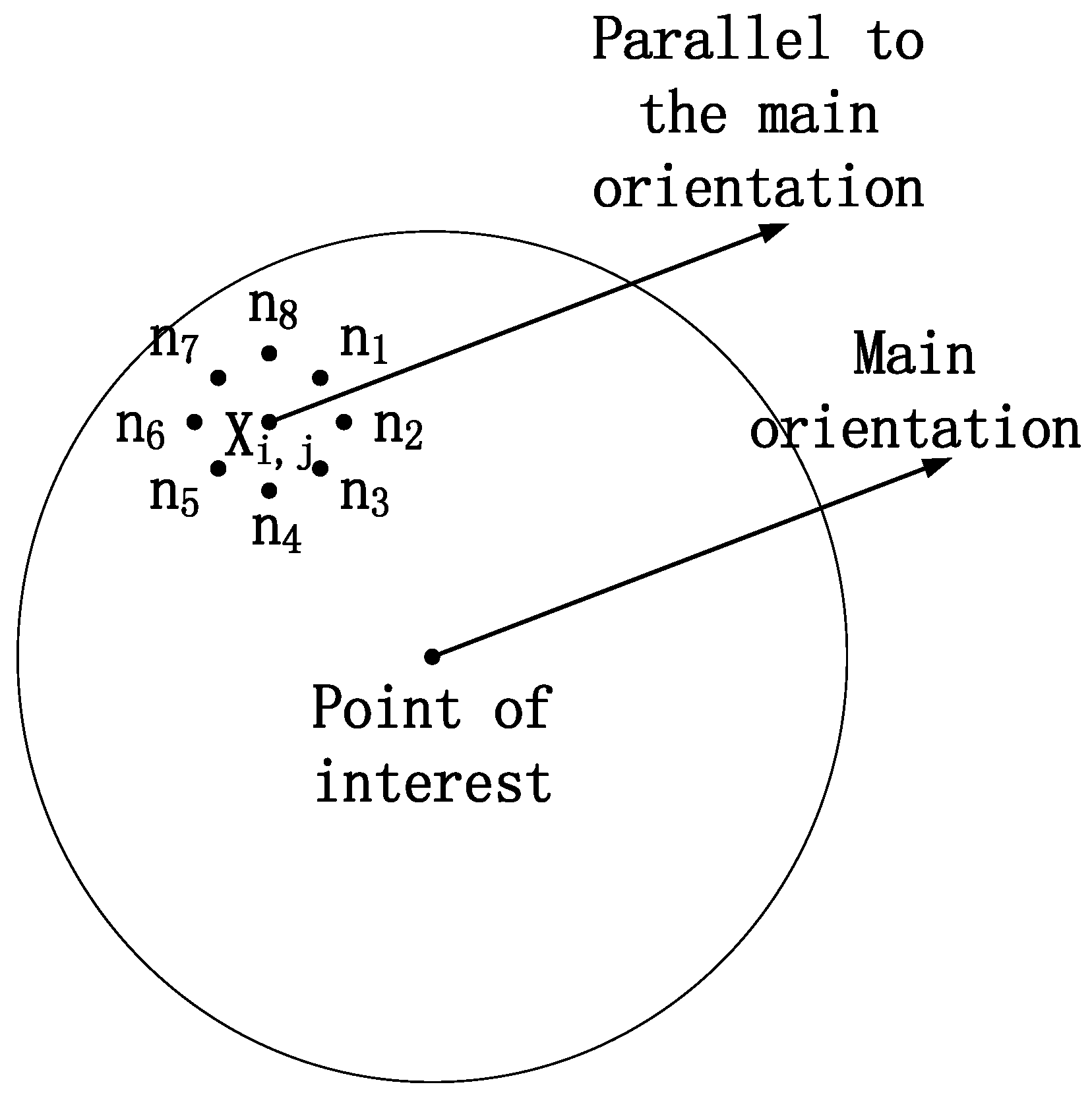
- Step 1: determine the encoding order of neighborhood pixels. For any pixel Xi,j in the feature region of POI, calculate the angles between the main direction and the lines joining the neighborhood pixels and the POI respectively. Then establish the direction coordinate system of Xi,j and select the neighborhood pixel with the smallest angle as n1 as well as the encoding start pixel. Finally encode the remaining neighborhood pixels clockwise as n2, n3, n4, n5, n6, n7, n8 (see Figure 4).
- Step 2: Add the four neighborhood pixels which are orthogonal-symmetry with respect to Xi,j into one group, then two 4-orthogonal-symmetric groups can be obtained, namely [n1, n3, n5, n7] and [n2, n4, n6, n8]. Encode the two groups:with:The result of the Equation (6) can be 0, 1, 2 and 3 which is written as 0001, 0010, 0100 and 1000 respectively.
- Step 3: Two 4-dimension feature descriptors can be obtained after the above two processes. Connect the two descriptors in series, then an 8-dimension WOS-LBP descriptor can be acquired.
- Step 1: Select a circular area centered on the POI with a radius of 8 pixels as the feature region, then divide the feature region into five subregions from the center to the outside and ensure the numbers of pixels within each subregion are similar.
- Step 2: Extract R, G, B color components from the color information of the feature region, calculate the WOS-LBP descriptors of all the pixels in each subregion Kl of every color component, then construct a distributed histogram to record the obtained feature descriptors in which each bin indicates each dimension of the feature descriptors. The calculation equation is:where l = 1, 2, 3, 4, 5, m = 1, 2, k = 0, 1, 2, 3, i and j is the relative offset of a pixel Xi,j in the subregion towards the POI, is a constant, normally 1.6.
- Step 3: Arrange the local feature descriptors of every color component in each subregion by relevant rules to finally generate the local feature descriptors of the POI.
2.3. Stereo Matching
2.3.1. Cost Initialization
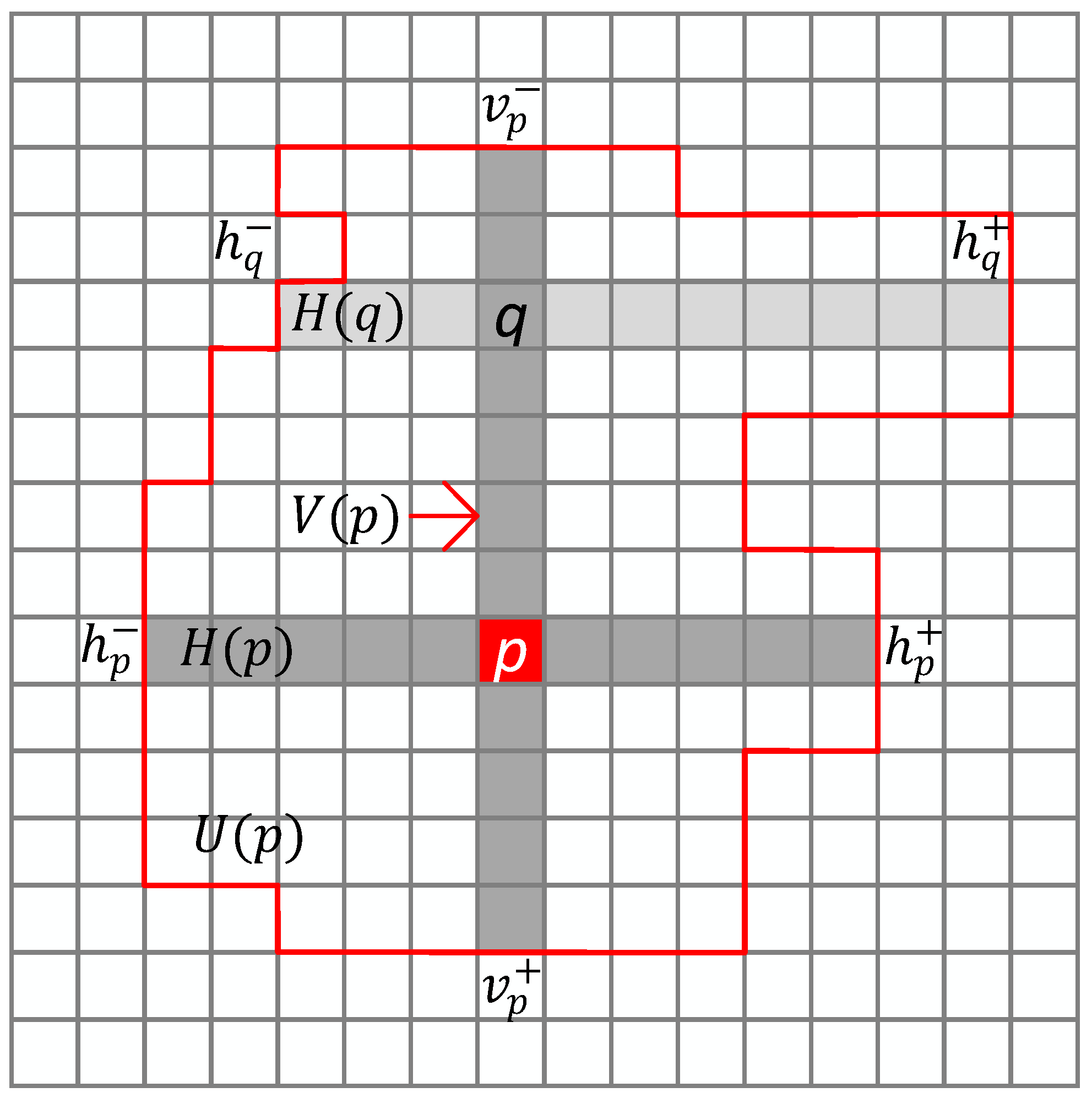
2.3.2. Improved Cross-Based Local Support Region Construction
- ;
- ;
- ;
- ;
- ;
- ;
- thresholds do not change, ;
2.3.3. Cost Aggregation
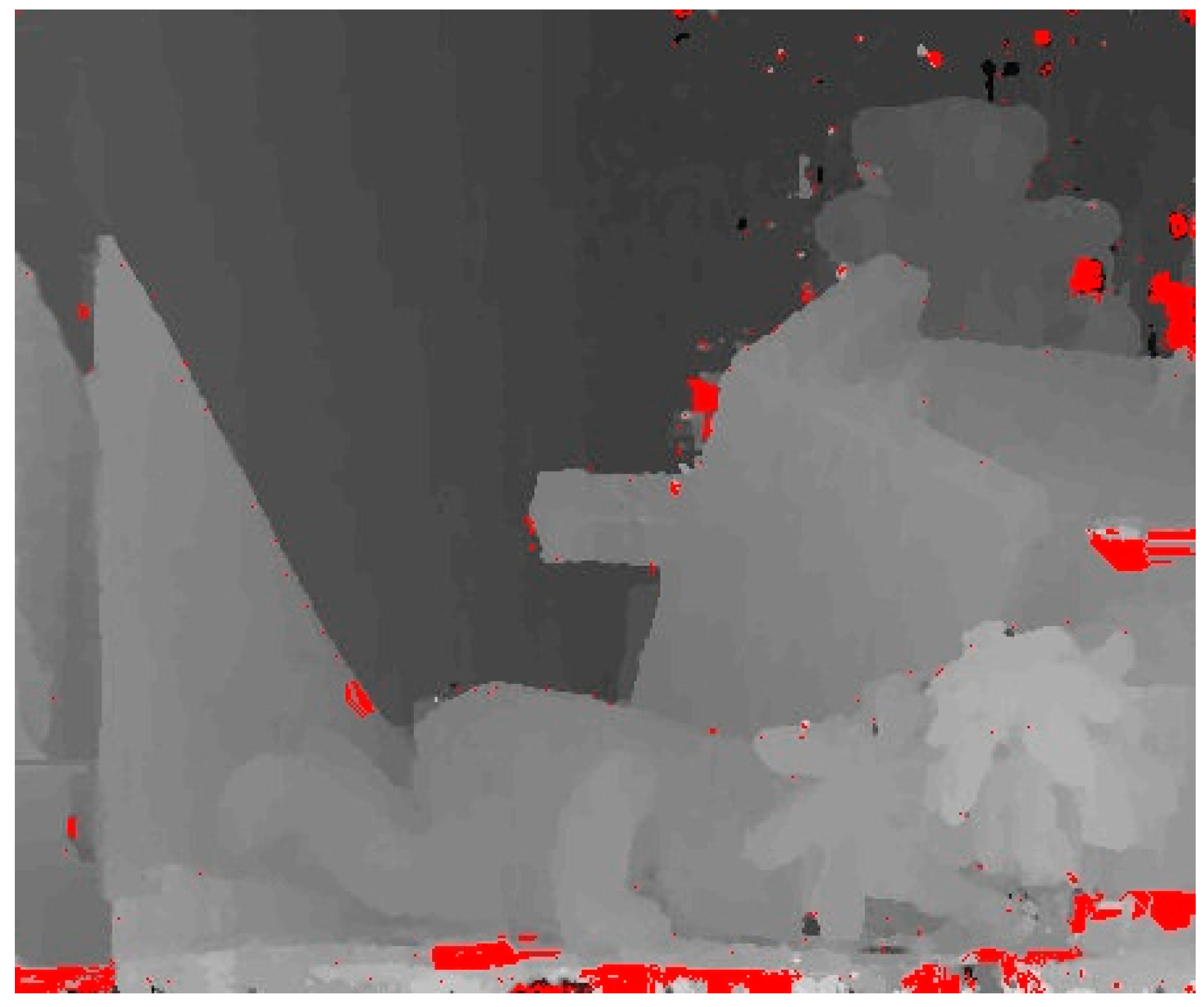
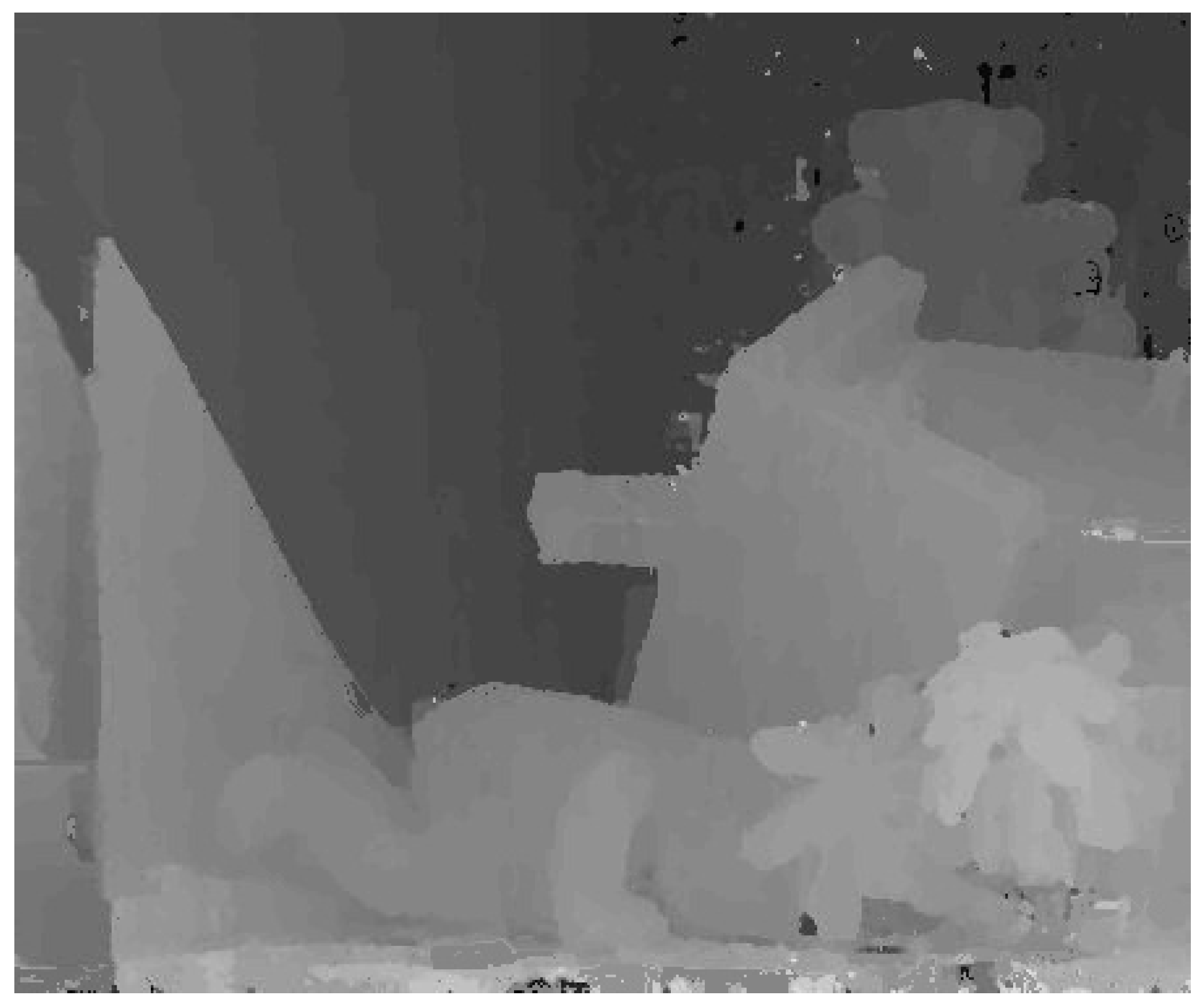
2.3.4. Disparity Optimization
- Condition 1: If , search for the nearest valid pixel from to the left and right and replace the disparity of with the disparity of the valid pixel found. If no valid pixels are found, search to the top and bottom.
- Condition 2: If , the average value of the disparities of all the valid pixels in the region is calculated as the optimized disparity of .
- Condition 3: If , construct a disparity histogram and replace the disparity of with the value of the bin with the highest peak.
- Step 1: Choose one pixel from the invalid pixels as an initial pixel each time.
- Step 2: Search the neighborhood pixels of . If and hasn’t been searched, set as another initial pixel.
- Step 3: Repeat the Step 2 until all the initial pixels has been searched, then a consecutive region is obtained. If the number of the pixels in the region is smaller than 2000, set all the pixels in the region as invalid pixels. Otherwise, set them as valid pixels.
- Step 4: Repeat Step 1 until all the invalid pixels has been chosen.
3. Experiments and Results
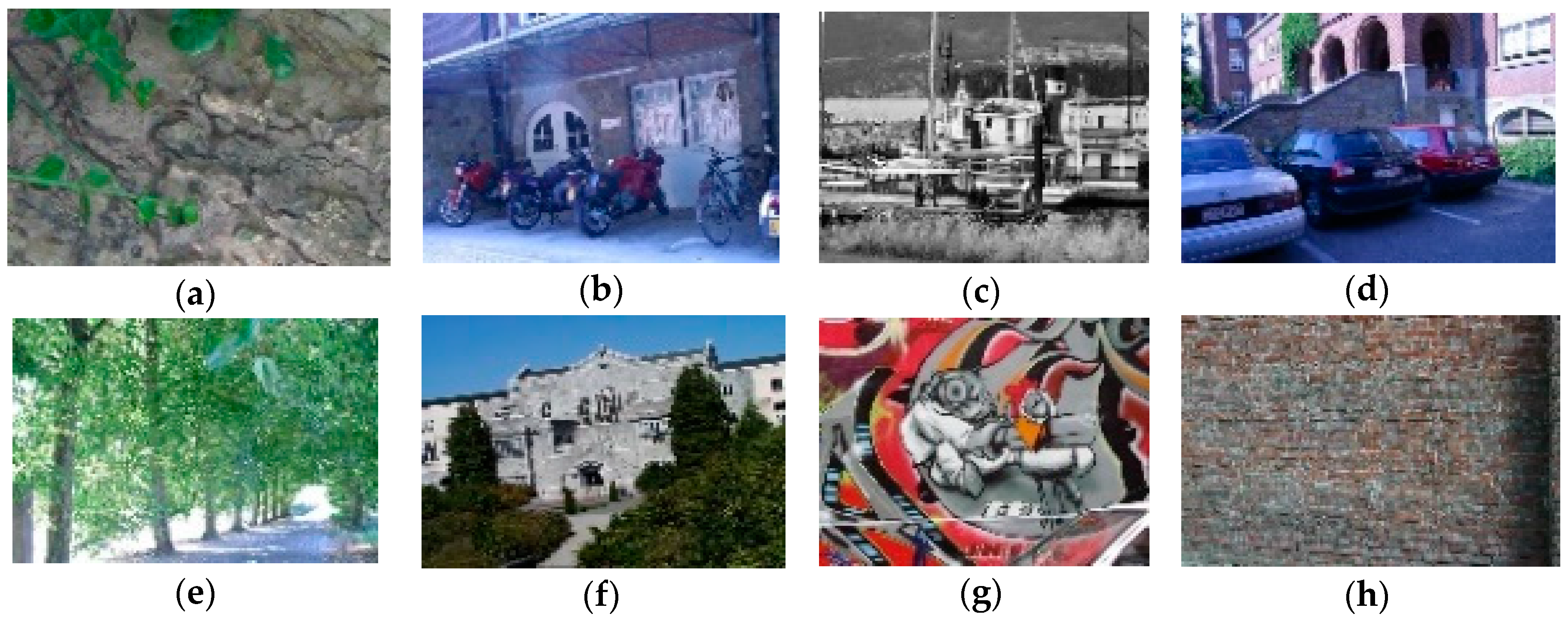
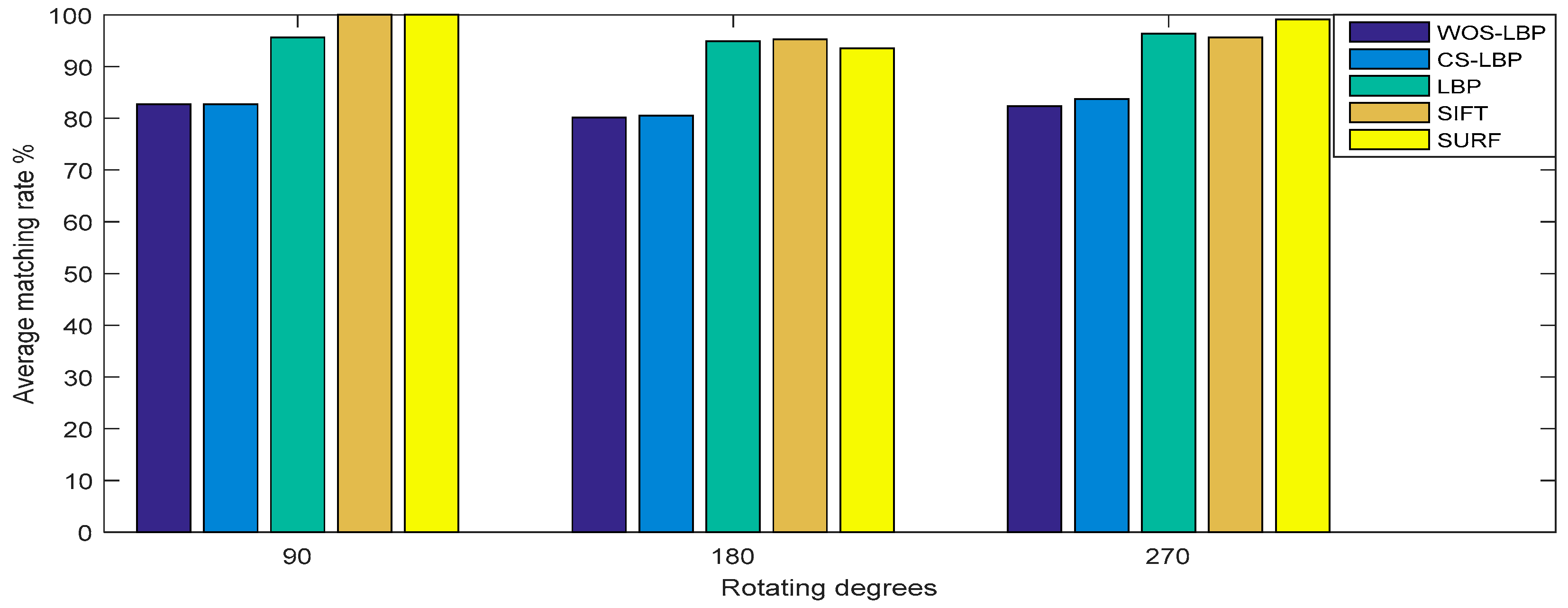
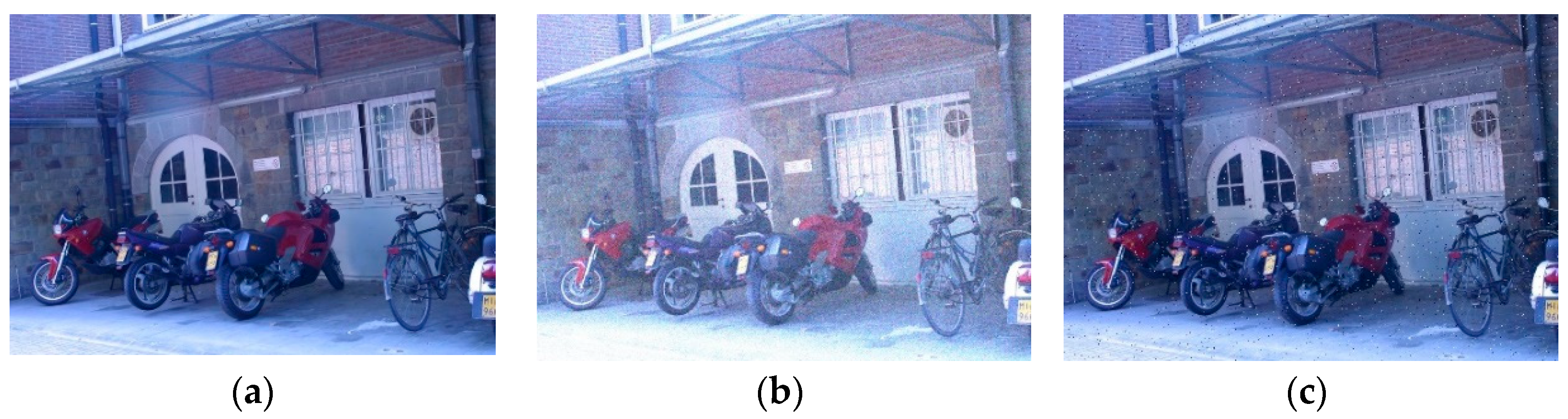
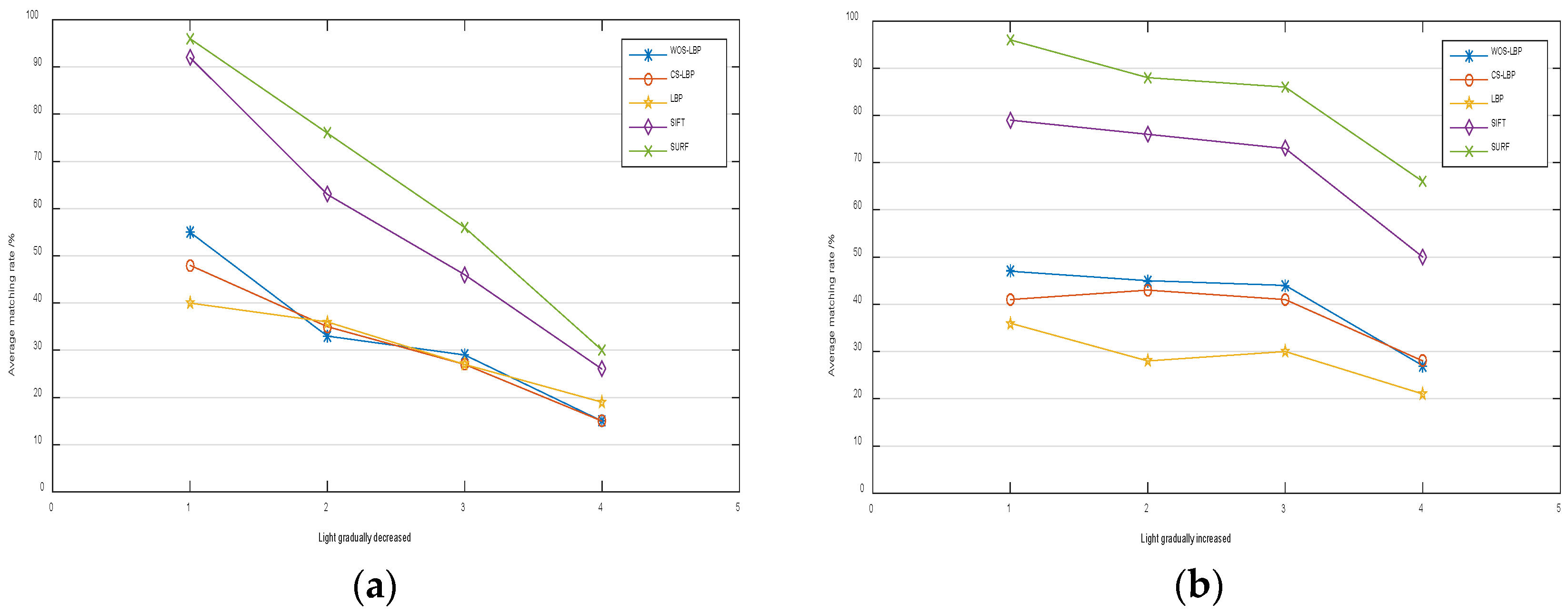
3.1. Evaluation of Local Feature Descriptor
- Step 1: Create three other rotating image sets by rotating each image in the test set by 90 degrees, 180 degrees and 270 degrees respectively.
- Step 2: Randomly, assign 1000 pixels in every image without rotation as the reference pixels.
- Step 3: In every rotating image set, search the matched pixels through the 5 local feature descriptors respectively. The coordinates of the obtained pixels should exactly match that of the reference pixels if successful.
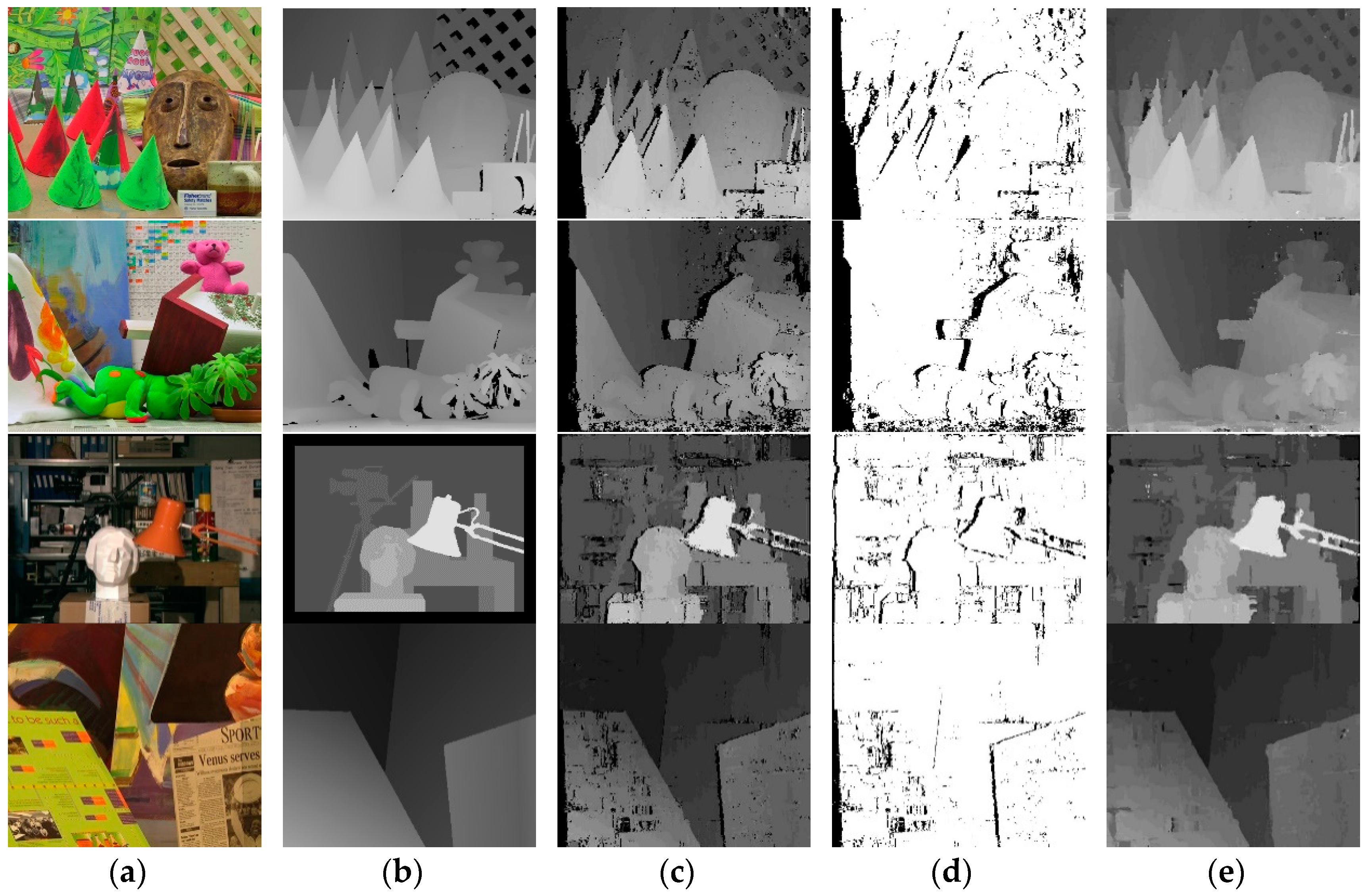
3.2. Evaluation of Stereo Matching
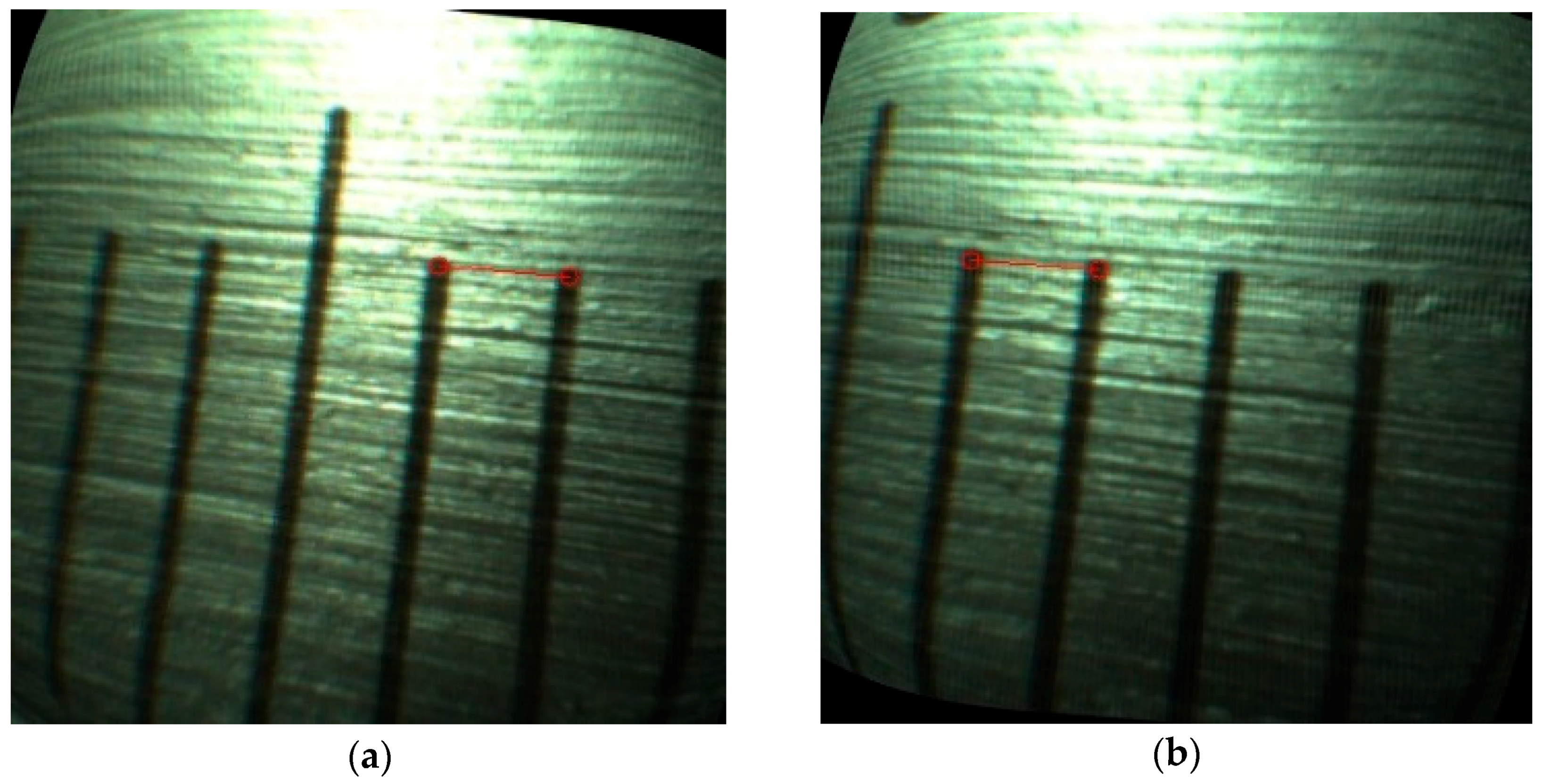
3.3. Length Measurement and 3D Reconstruction Using the Designed Endoscope
4. Discussion and Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Yu, G. Development and Design of Video Endoscope Image System; East China University of Science and Technology: Shanghai, China, 2016. [Google Scholar]
- Choi, W.; Rubtsov, V.; Kim, C.J. Miniature flipping disk device for size measurement of objects through endoscope. J. Microelectromech. Syst. 2012, 21, 926–933. [Google Scholar] [CrossRef]
- Guo, J.; Liu, P.; Jiao, G.; Lu, Y.; Lv, J. Binocular optical system of industrial endoscope for three-dimensional measurement. Opt. Precis. Eng. 2014, 22, 2337–2344. [Google Scholar]
- Furukawa, R.; Sanomura, Y.; Tanaka, S.; Yoshida, S.; Sagawa, R.; Visentini-Scarzanella, M.; Kawasaki, H. 3D endoscope system using DOE projector. In Proceedings of the 2016 38th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Orlando, FL, USA, 16–20 August 2016; pp. 2091–2094. [Google Scholar]
- Mentor Visual iQ Video Borescope. Available online: https://www.gemeasurement.com/inspection-ndt/remote-visual-inspection/mentor-visual-iq-video-borescope (accessed on 14 May 2018).
- Videoscopes and Borescopes. Available online: https://www.olympus-ims.com.cn/zh/rvi-products/iplex-nx/ (accessed on 14 May 2018).
- Shenda Endoscope. Available online: http://www.china-endoscope.com/ (accessed on 14 May 2018).
- Shanghai Aohua Endoscopy Co. Ltd. Available online: http://www.aohua.com/index.php (accessed on 14 May 2018).
- Beijing Dellon Inspection Technology Co., Ltd. Available online: http://www.dellon.net/products/dianzi/286.html (accessed on 14 May 2018).
- Xvzhou TENOSI Visual Technology Co. Ltd. Available online: http://www.tenosi.com/article.asp?id=856 (accessed on 14 May 2018).
- Li, H.; Shan, W.; Liu, B. Research of error-model on two eyes stereoscopic measurement system. Opt. Tech. 2006, 32, 24–26. [Google Scholar]
- Lowe, D.G. Distinctive image features from scale-invariant keypoints. IJCV 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Ke, Y.; Sukthankar, R. PCA-SIFT: A more distinctive representation for local image descriptors. In Proceedings of the 2004 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR), Washington, DC, USA, 27 June–2 July 2004; pp. 511–517. [Google Scholar]
- Bay, H.; Tuytelaars, T.; Van Gool, L. Surf: Speeded up robust features. In Proceedings of the ECCV, Graz, Austria, 7–13 May 2006; pp. 404–417. [Google Scholar]
- Ojala, T.; Pietikainen, M.; Harwood, D. Performance evaluation of texture measures with classification based on Kullback discrimination of distributions. In Proceedings of the IAPR International Conference on Pattern Recognition, Jerusalem, Israel, 9–13 October 1994; pp. 582–585. [Google Scholar]
- Zhu, S.; Li, Z. A stereo matching algorithm using improved gradient and adaptive window. Acta Opt. Sin. 2015, 35, 123–131. [Google Scholar]
- Hirschmüller, H.; Scharstein, D. Evaluation of stereo matching costs on images with radiometric differences. IEEE Trans. Pattern Anal. Mach. Intell. 2009, 31, 1582–1599. [Google Scholar] [CrossRef] [PubMed]
- Zhang, K.; Lu, J.; Lafruit, G. Cross-based local stereo matching using orthogonal integral images. IEEE Trans. Circuits Syst. Video Technol. 2009, 19, 1073–1079. [Google Scholar] [CrossRef]
- Bradski, G.; Kaehler, A. Learning OpenCV: Computer Vision with the OpenCV Library; O’Reilly Media, Inc.: Sebastopol, CA, USA, 2008; ISBN 978-0-596-51613-0. [Google Scholar]
- Canny, J. A variational approach to edge detection. In AAAI Conference on Artificial Intelligence; AAAI Press: Palo Alto, CA, USA, 1983; pp. 54–58. [Google Scholar]
- Pan, C.; Yang, S.; Chen, N. Fire smoke recognition based on image entropy. J. Jiangsu Univ. Sci. Technol. (Nat. Sci. Ed.) 2015, 29, 52–57. [Google Scholar]
- Affine Covariant Features. Available online: http://www.robots.ox.ac.uk/~vgg/research/affine/ (accessed on 14 May 2018).
- Heikkilä, M.; Pietikäinen, M.; Schmid, C. Description of interest regions with local binary patterns. Pattern Recognit. 2009, 42, 425–436. [Google Scholar] [CrossRef]
- Einecke, N.; Eggert, J. A two-stage correlation method for stereoscopic depth estimation. In Proceedings of the IEEE International Conference on Digital Image Computing: Techniques and Applications, Sydney, Australia, 1–3 December 2011; pp. 227–234. [Google Scholar]
- Kolmogorov, V.; Zabih, R. Computing Visual Correspondence with Occlusions using Graph Cuts. In Proceedings of the Eighth IEEE International Conference on Computer Vision (ICCV), Vancouver, BC, Canada, 7–14 July 2001; Volume 2, pp. 508–515. [Google Scholar]
- Yu, W.; Chen, T.; Franchetti, F.; Hoe, J.C. High performance stereo vision designed for massively data parallel platforms. IEEE Trans. Circuits Syst. Video Technol. 2010, 20, 1509–1519. [Google Scholar] [CrossRef]
- Hirschmuller, H. Accurate and efficient stereo processing by semi-global matching and mutual information. In Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR), San Diego, CA, USA, 20–25 June 2005; pp. 807–814. [Google Scholar]
- Zhang, Z. A flexible new technique for camera calibration. IEEE Trans. Pattern Anal. Mach. Intell. 2000, 22, 1330–1334. [Google Scholar] [CrossRef]
- Tsai, R. A versatile camera calibration technique for high accuracy 3D machine vision metrology using off-the-shelf TV cameras and lenses. IEEE J. Robot. Autom. 1987, 3, 323–344. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Descriptor (Size) | WOS-LBP (120) | CS-LBP (240) | LBP (3840) | SIFT (128) | SURF (64) |
|---|---|---|---|---|---|
| time/ms | 0.6434 | 0.6588 | 1.1427 | 3.3605 | 0.0750 |
| Noise Type | Average Matching Rate/% | ||||
|---|---|---|---|---|---|
| WOS-LBP | CS-LBP | LBP | SIFT | SURF | |
| No noise | 99.88 | 99.88 | 98.63 | 100.00 | 100.00 |
| Gaussian noise | 2.63 | 2.25 | 1.63 | 31.37 | 40.13 |
| Salt-and-pepper noise | 60.63 | 62.25 | 75.13 | 38.00 | 46.38 |
| Average | 54.38 | 54.79 | 58.46 | 56.47 | 62.17 |
| The Parameters Used in Experiment | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Parameters | ||||||||||||||
| Values | 1.5 | 25 | 30 | 20 | 10 | 15 | 30 | 50 | 500 | 15 | 7.5 | 7.5 | 15 | 1 |
| Algorithm | Avg | Tsukuba | Venus | Teddy | Cones | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Non | All | Disc | Non | All | Disc | Non | All | Disc | Non | All | Disc | ||
| Proposed | 8.48 | 3.00 | 4.42 | 9.75 | 1.00 | 2.46 | 7.43 | 6.00 | 13.71 | 15.55 | 4.00 | 11.46 | 11.00 |
| ESAW | 8.21 | 1.92 | 2.45 | 9.66 | 1.03 | 1.65 | 6.89 | 8.48 | 14.20 | 18.70 | 6.56 | 12.70 | 14.40 |
| SemiGlob | 7.50 | 3.26 | 3.96 | 12.80 | 1.00 | 1.57 | 11.30 | 6.02 | 12.20 | 16.30 | 3.06 | 9.75 | 8.90 |
| SNCC | 9.41 | 5.17 | 6.08 | 21.70 | 0.95 | 1.73 | 12.00 | 8.04 | 11.10 | 22.90 | 3.59 | 9.02 | 10.70 |
| GC+occ | 8.26 | 1.19 | 2.01 | 6.24 | 1.64 | 2.19 | 6.75 | 11.20 | 17.40 | 19.80 | 5.36 | 12.40 | 13.00 |
| Left Camera | Right Camera | |
|---|---|---|
| Intrinsic matrix | ||
| Distortion coefficients | (−0.0574, −0.2928, −0.0018, 0.0021, 0.2151) | (−0.0536, −0.3176, −0.0011, −0.0023, 0.2517) |
| Rotation matrix | ||
| Translation vector | ||
| Experiment | Results/mm | Error/mm | Depth/mm | Relative Error/% |
|---|---|---|---|---|
| 1 | 0.9971 | 0.0029 | 2.76 | 0.29 |
| 2 | 0.9458 | 0.0542 | 2.50 | 5.42 |
| 3 | 0.9199 | 0.0801 | 3.53 | 8.01 |
| 4 | 0.9965 | 0.0035 | 3.35 | 0.35 |
| 5 | 0.9360 | 0.0640 | 5.55 | 6.40 |
| 6 | 0.9956 | 0.0044 | 4.60 | 0.44 |
| 7 | 0.9850 | 0.0150 | 5.23 | 1.50 |
| 8 | 0.9780 | 0.0220 | 3.45 | 2.22 |
| 9 | 0.9560 | 0.0440 | 2.55 | 4.44 |
| Average | 0.9678 | 0.0322 | 3.72 | 3.22 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, D.; Liu, H.; Cheng, X. A Miniature Binocular Endoscope with Local Feature Matching and Stereo Matching for 3D Measurement and 3D Reconstruction. Sensors 2018, 18, 2243. https://doi.org/10.3390/s18072243
Wang D, Liu H, Cheng X. A Miniature Binocular Endoscope with Local Feature Matching and Stereo Matching for 3D Measurement and 3D Reconstruction. Sensors. 2018; 18(7):2243. https://doi.org/10.3390/s18072243
Chicago/Turabian StyleWang, Di, Hua Liu, and Xiang Cheng. 2018. "A Miniature Binocular Endoscope with Local Feature Matching and Stereo Matching for 3D Measurement and 3D Reconstruction" Sensors 18, no. 7: 2243. https://doi.org/10.3390/s18072243
APA StyleWang, D., Liu, H., & Cheng, X. (2018). A Miniature Binocular Endoscope with Local Feature Matching and Stereo Matching for 3D Measurement and 3D Reconstruction. Sensors, 18(7), 2243. https://doi.org/10.3390/s18072243