1. Introduction
The detection of fluctuating targets with low signal-to-clutter ratio (SCR) is of significant importance in radar systems. Conventional detecting and tracking algorithms use thresholded detection as input. A target with low signal-to-clutter ratio is often lost due to information being irreversibly discarded after thresholding. Multi-frame integration is an effective strategy used in radar applications to detect dim targets by integrating signal returns over multiple consecutive scans. In the presence of a moving target, multi-frame integration requires track-before-detect (TBD) techniques to correctly correlate data over time.
Dynamic programming based on TBD (DP–TBD) is one of the TBD techniques [
1,
2], that has attracted extensive attention for the advantages of simplicity and needing less information. It transforms the integration into an optimal estimation of the physically admissible trajectory by maximal integration value of the merit function, which is a kind of multi-frame test statistic. DP–TBD can detect a target of arbitrary motion form and has been widely applied to several kinds of sensors [
3,
4]. In order to solve the problem of high-dimensional maximization under a multi-target environment, a novel partition method to cluster targets into well separated groups was proposed in [
5]. In [
6,
7], the track formation procedure with successive track cancellation (STC) was described to overcome the performance loss when targets are closely spaced. Meanwhile, research on the merit function of DP–TBD has also been widely carried out in recent years. In [
8,
9], the expressions for the log-likelihood ratio (LLR), which can better discriminate clutter-plus-target measurements from clutter only measurements, were derived and used. In addition, a low-complexity power-efficient TBD procedure, where the generalized likelihood ratio test (GLRT) [
10,
11,
12] was solved using a Viterbi-like tracking algorithm, was proposed in [
13]. To reduce the big computational burden of DP–TBD, computationally efficient DP–TBD algorithms were derived in [
14,
15] respectively.
The above quoted papers on DP–TBD techniques always assumed that the background is Gaussian distributed with known power. However, for high-resolution radars and radars at small grazing angle, the Gaussian assumption may not be adequate. In this case, more heavy-tailed background models should be considered in the real world. Weibull distribution, log-normal distribution and K-distribution are the commonly compound-Gaussian background models used in radar communities. This paper is mainly concerned with K-distribution, which is widely used in high-resolution radar detection systems. K-distribution [
16,
17] was derived from a paper by Eric Jakeman and Peter Pusey (1978) who used it to model microwave sea echo. It has been found to be a suitable model for heavy-tailed background in radar systems [
18], since it provides an excellent agreement between theoretical and experimental data. K-distribution also arised as the consequence of a statistical or probabilistic model used in synthetic aperture radar (SAR) imagery.
As the signal strength may change from scan to scan, these fluctuations should be taken into account when building the measurement-based model. A Swerling family of target amplitude fluctuation models is commonly used to capture the radar-cross section (RCS) changes over time [
19]. Swerling targets of type 0 can be used to model a target with constant RCS, while Swerling targets of type 1 is used to model a target whose RCS fluctuates according to the exponential density in radar systems.
Target detection in K-distributed background is more challenging than in Gaussian or Rayleigh distributed background due to the higher likelihood of target-like outliers, especially for fluctuating targets. Besides, it is inefficient and computationally costly to carry out an accurate search for all the discrete states, as the surveillance region is much larger than the size of a target, such as radar target detection. In this paper, attention is devoted to the detection of a Swerling target of type 1 in a surveillance region characterized by K-distributed background through the use of DP–TBD. Moreover, by employing a two-stage detection approach, the proposed algorithm is able to achieve further computational reduction. The main contributions of this paper are given as below:
In order to limit complexity while still retaining the benefits of DP–TBD, we resort to a two-stage detection process with different resolution cells.
For typical non-Gaussian distributed clutter (K-distribution) and a typical target amplitude fluctuation model (Swerling 1), the DP–TBD algorithm based on prior information is proposed. By using the likelihood ratio merit function in DP integration, the performance loss produced by the “heavy-tailed” clutter measurements can be reduced.
An efficient but accurate approximation method is proposed to reduce the complexity of evaluating the merit function.
The remainder of this paper is organized as follows:
Section 2 presents the notations and system models. In
Section 3, a two-stage detection approach is proposed at first, and the expressions of the likelihood ratio merit function are derived in K-distributed clutter background for Swerling target of type 1; the implementation issues of the merit function are also discussed. Simulation results are showed by comparing different DP–TBD strategies in
Section 4 and
Section 5 provides some conclusions.
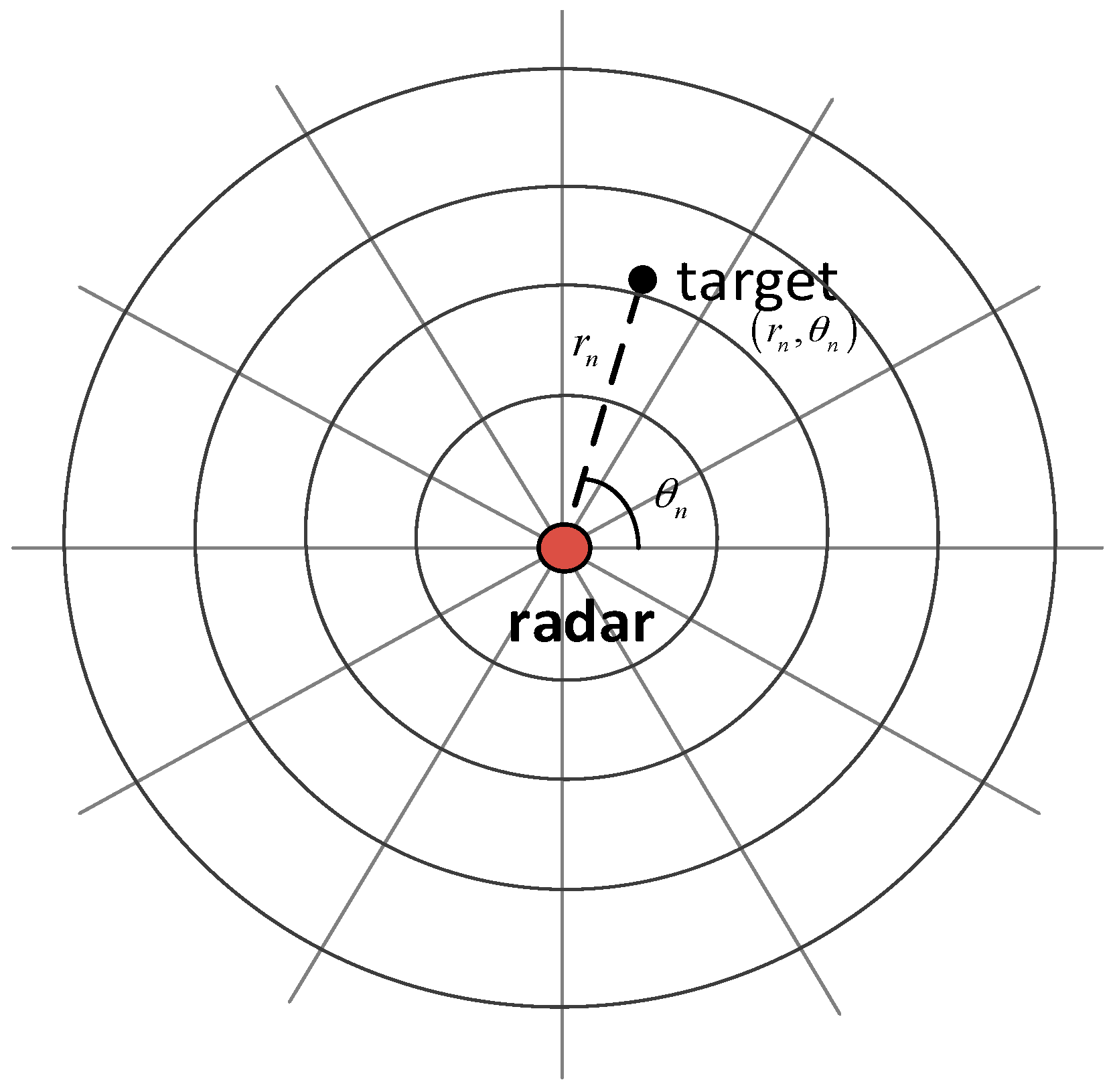
Mathematical notations used in this paper are described as follows. is the target kinematic state at scan ; denotes an amplitude from the Swerling 1 target and denotes the K-distributed clutter; is the measurement amplitude in K-distributed clutter background. is defined as the merit function at scan ; is defined as the maximal integration value of all the admissible trajectories; is the collection of states at scan for which transition to is possible; is the retracing function, indicating the best state of the previous scan.
3. Development of the Proposed Strategies
The DP–TBD algorithm decomposes the integration among N successive scans into N sub-processes. The
nth sub-process contains all the measurements up to scan
. The target can be detected and tracked by calculating the maximum of the energy integration value through a recursive model, which could be expressed as:
where
is defined as the merit function at scan
;
is defined as the maximal integration value of all the admissible trajectories;
is a collection of states at scan
for which a transition to
is possible, and it can be obtained by the location and maximum velocity of the target;
is the retracing function, indicating the best state of the previous scan, which makes the integration value reach its maximum.
In summary, DP–TBD implements the equivalent of an exhaustive search in an efficient manner by enumerating and valuing all physical admissible state sequences, finally returning the state sequences whose final maximal integration value
exceeds a given detection threshold
, i.e.,:
There are mainly two problems throughout the process. Firstly, the computational complexity of DP–TBD is unaffordable in the presence of a high-mobility target when the number of resolution elements is large. The discretization of state space is always based on the sensor’s resolution so as to make full use of the measurements and achieve possibly accurate estimates. In this situation, strategies hardly lead to real-time implementable schemes, even resorting to a dynamic programming algorithm. In order to reduce the burden of computation, a two-stage detection approach is proposed in this work. Secondly, most of the previous work on DP–TBD assumed that the background model would be Rayleigh or Gaussian distribution with a known power. Such assumptions may not be adequate, as in the real world a more heavy-tailed background model than expected is often encountered. To improve the detection performance, we propose a novel DP–TBD algorithm based on the prior information to solve the aforementioned problem. In this paper, the merit function is set to be the likelihood ratio under both target-present hypothesis and null-target hypothesis in a surveillance region which is characterized by K-distributed background, and the simulated data would be tested for presenting the performance.
3.1. Two-Stage Detection Approach
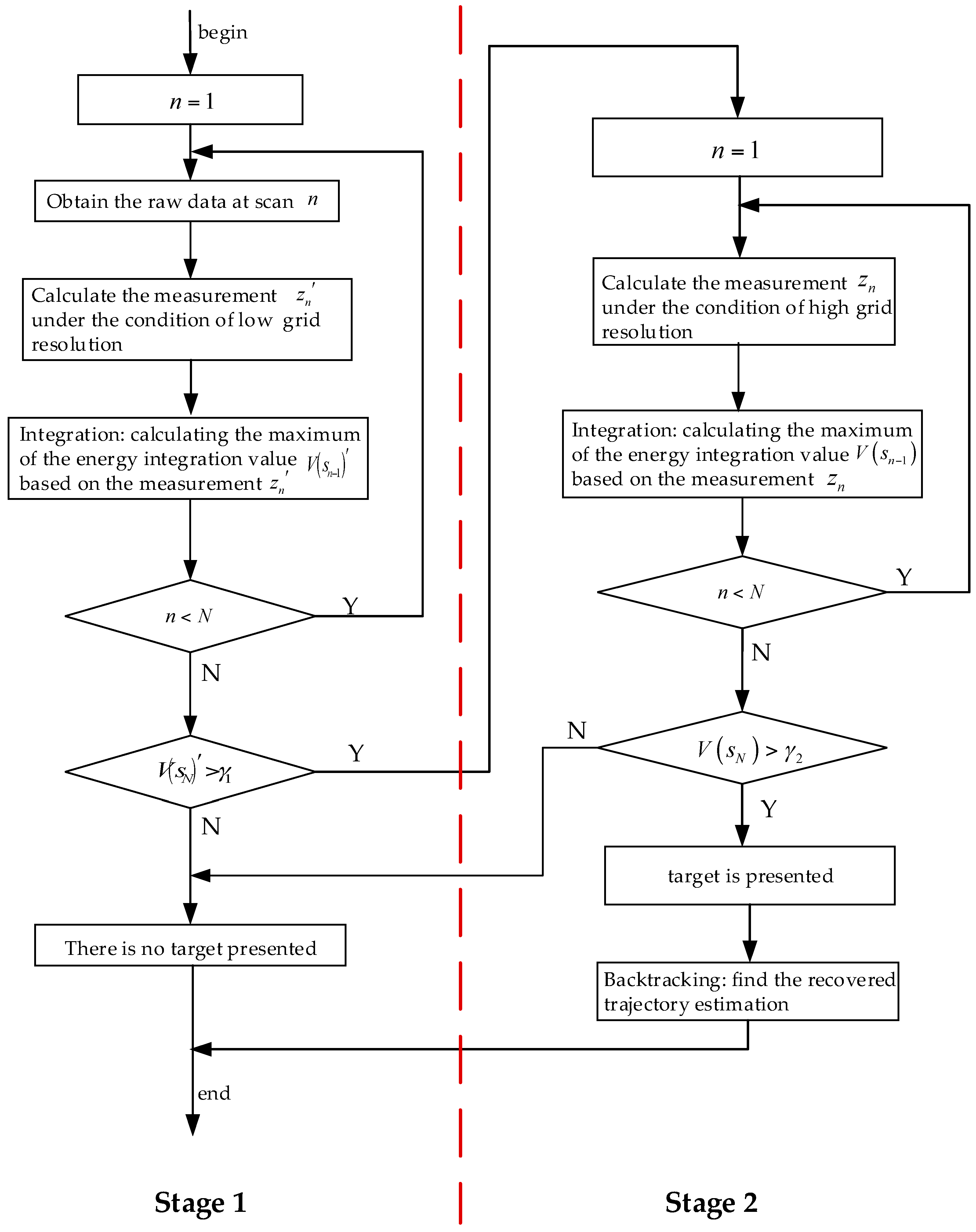
Generally, DP–TBD is a grid-based method that estimates target trajectory by means of searching all the admissible paths in a discrete state space and the discretization of state space is based on the sensor’s resolution. It is inefficient and computationally costly to carry out an accurate search (i.e., the search grid is exactly divided based on the sensor’s resolution) since only a fraction of measurements are related to the actual target when the surveillance region is large. In order to reduce the computational load, while still retaining the benefits of TBD, here we resort to a two-stage detection approach which is illustrated in
Figure 3.
At stage 1, we first obtain the raw data at scan , and roughly calculate the measurement under the condition of low grid resolution. The target states are estimated by searching discrete grids with larger cell size based on the DP integration. After N times loop, the maximum of the energy integration value at scan N could be obtained by the process. For a single target model, the maximum integration value which exceeds detection threshold is used to determine the existence of the target. If there is a target presented in the surveillance region, we could refine the target trajectory in stage 2.
In order to obtain a more accurate estimate, stage 2 is employed to recalculate the measurements under the high grid resolution condition. Once the maximum integration value
exceeds the detection threshold
, the estimation of the final target trajectory can be obtained by backtracking. For each estimated state
, we have:
So the recovered trajectory estimate is
. The algorithmic description of the proposed two-stage TBD approach is shown in
Table 1.
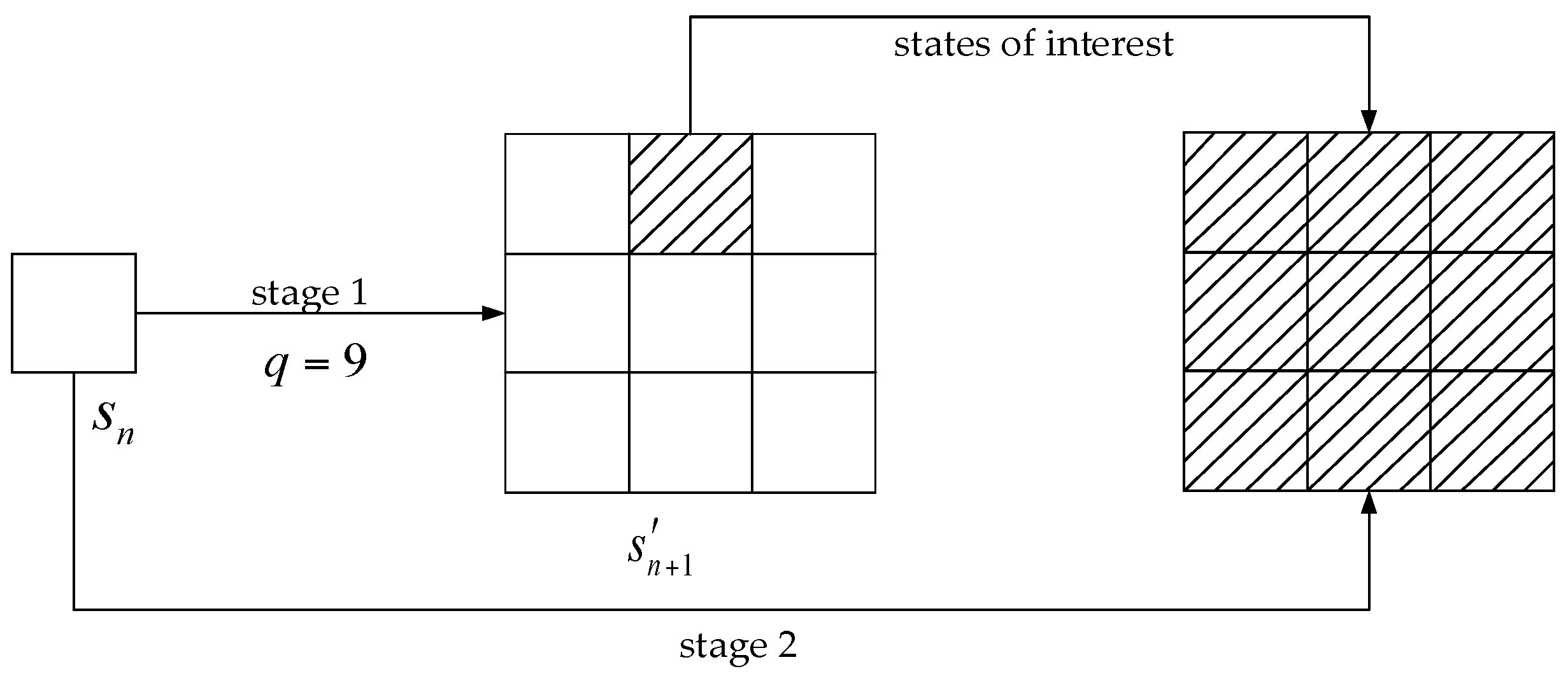
The surveillance region is divided into
grid cells based on the resolution of the radar system, i.e.,
and
, where
and
denote the number of cells in range and azimuth, respectively. To realize the target search with larger cell size, the state space is re-discretized by
and
to obtain
grid cells at first. As shown in
Figure 4, all the measurements and DP integrations are processed in stage 1 based on the new state space, which may obtain a rough target trajectory by less computation. Then in stage 2, DP integration concentrates on the part of states which are indicated by stage 1. As calculations of less meaningful states could be avoided, the computational costs will become more reasonable.
3.2. Derivation and Implementation of the Merit Function
Combined (6), PDF for the Swerling 1 target in K-distributed clutter is given by:
and
can be derived by marginalizing over
since
is random, i.e.,
where the integrand
is given by:
Substituting (7) and (16) into the expression of merit function
at scan
,
can be written as:
Although the integrand
in (17) has no closed-form solution, it can be evaluated with reasonable accuracy by using the trapezoidal rule, i.e.,
where
is sample point drawn from the time interval
,
is a sampling interval which is short enough to cover the effective support of
, and
denotes the number of sample points.
The sample points can be obtained by either deterministic sampling with a uniform grid or stochastic importance sampling. Since the integrand
may tend quickly towards
when
, while tending slowly towards 0 when
. A reasonable approximation obtained by deterministic uniform grid sampling or stochastic importance sampling is difficult to carry out. A grid with a variable resolution method was proposed in [
21] to approximate the merit function, which also leads to high computational complexity.
In order to reduce the complexity of approximation, we could possibly circumvent these problems by generating a lookup table offline with sample points using a uniform grid. The number of sample points with uniform grid is large enough to approximate the integrand
accurately. Based on the lookup table, this calculating method trades little cost of precision and memory space for a great improvement on running speed in the calculation. The histograms of generation data and theory PDF are shown in
Figure 5 for the Swerling targets type 1 with different parameters. According to
Figure 5, we conclude that the approximation error is negligible.
Note that the K-distribution shape parameter
and the scale parameter
are supposed to be known in the derivation of merit function. In the case where the background is significantly heavy-tailed and the parameters are unknown, we should estimate the parameters first, which can be obtained through a numerical maximization of the likelihood function. Since the maximum likelihood techniques require numerical optimization routines and evaluation of Bessel functions, they are computationally intensive and, therefore, inappropriate for evaluation of large data sets. Abraham [
22] recommended moment estimators based on the first and second moments, which can be used as our estimator in this work.
5. Conclusions
This paper has presented the systematic treatment of heavy-tailed clutter from a target detection and tracking perspective. Target detection in K-distributed clutter is more challenging than in Gaussian- or Rayleigh-distributed clutter due to the higher likelihood of target-like outliers, especially for a fluctuating target. In this work, we dealt with the fluctuating target detection and tracking problem using a modified DP–TBD method. The contributions are as follows: first we have solved the target detection problem using two-stage detection architecture to avoid calculations of less meaningful states. Secondly, for a Swerling 1 target in a K-distributed background, the merit function was derived and implemented in the integration process of DP–TBD to enhance radar detection performance. In order to reduce the complexity of integral calculation, we also resorted to the trapezoidal rule with a generating lookup table.
Numerical analysis demonstrated that performance improvement could be applied via the proposed DP–TBD algorithm based on prior information, especially for heavy-tailed K-distributed clutter. Moreover, simulation results suggested that a trade-off between performance and computational complexity exists. Further research may investigate the performance of the proposed DP–TBD method experimentally. It may also be of interest to investigate other background models than the K-distribution.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}