1. Introduction
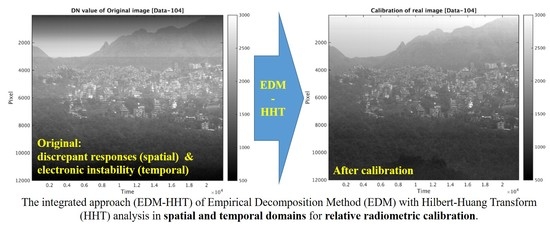
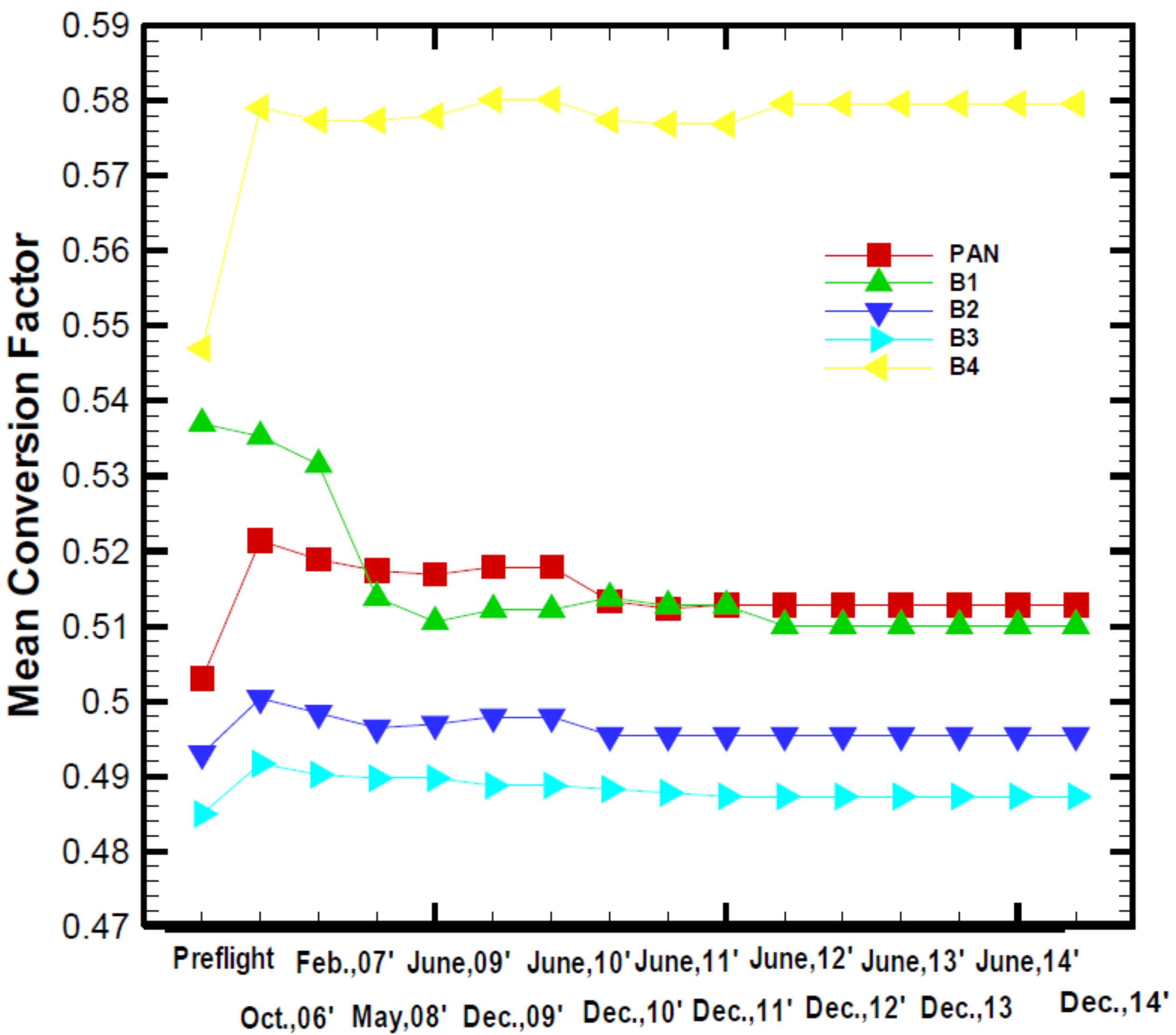
Sensors of modern digital imagers onboard satellites must be assured of accuracy by pre-flight radiometric calibration. This task is relatively easy in the space environment simulation laboratory prior to a satellite’s launch. However, after launch, sensors are apt to experience degradation over time which may occur in optical, electrical or supportive components during launch; or due to satellite orbital drifts and perturbations, cosmic ray bombardment, etc. As illustrated in
Figure 1, FORMOSAT-2 (FS-2) onboard sensors’ degradation causes the temporal variation of mean conversion factor between the output digital number (DN) and the input radiation intensity of the observed imagery. Hence, sensors must be regularly calibrated and corrected with the radiometric conversion factor to ensure high-quality imagery. Similar to the FS-2 satellite, this requirement is also true for the optical remote-sensing instrument (RSI) onboard FS-5. Sensors’ calibration is generally a crucial task both before and after a satellite’s launch. Specifically, the relative and absolute radiometric calibration of on-orbit sensors play a key role in the aspect of optical imaging applications. For imagery, data quality is vital for scientific applications such as satellite data assimilations in numerical weather prediction (NWP) and so on. The accuracy of radiometric calibration needs to be well evaluated and achieved at a certain level of radiometric stability. As a rule of thumb, applications or research studies demand remote-sensing data from sensors with long-term radiometric stability, where the radiometric uncertainty in the data is less than the minimum detectable change in magnitude of the target signal [
1,
2,
3].
The FS-5 project is the first space program for which the National Space Organization (NSPO) has taken full responsibility for the design, development, and system integration. Its mission is to promote space science experiments and research, to enhance Taiwan’s self-reliant space technology capabilities, and to continue to serve the users of FS-2’s global imagery services. The NSPO developed the key components of the remote-sensing instrument (RSI) sensor and spacecraft bus through the integration of resources from domestic partners [
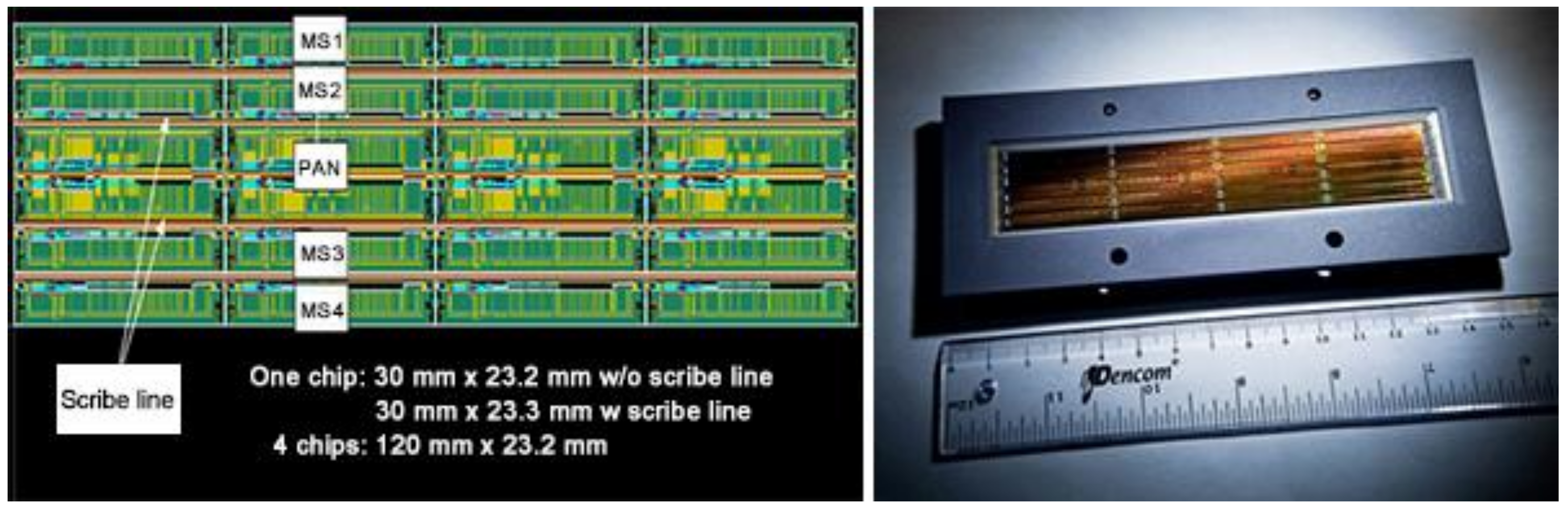
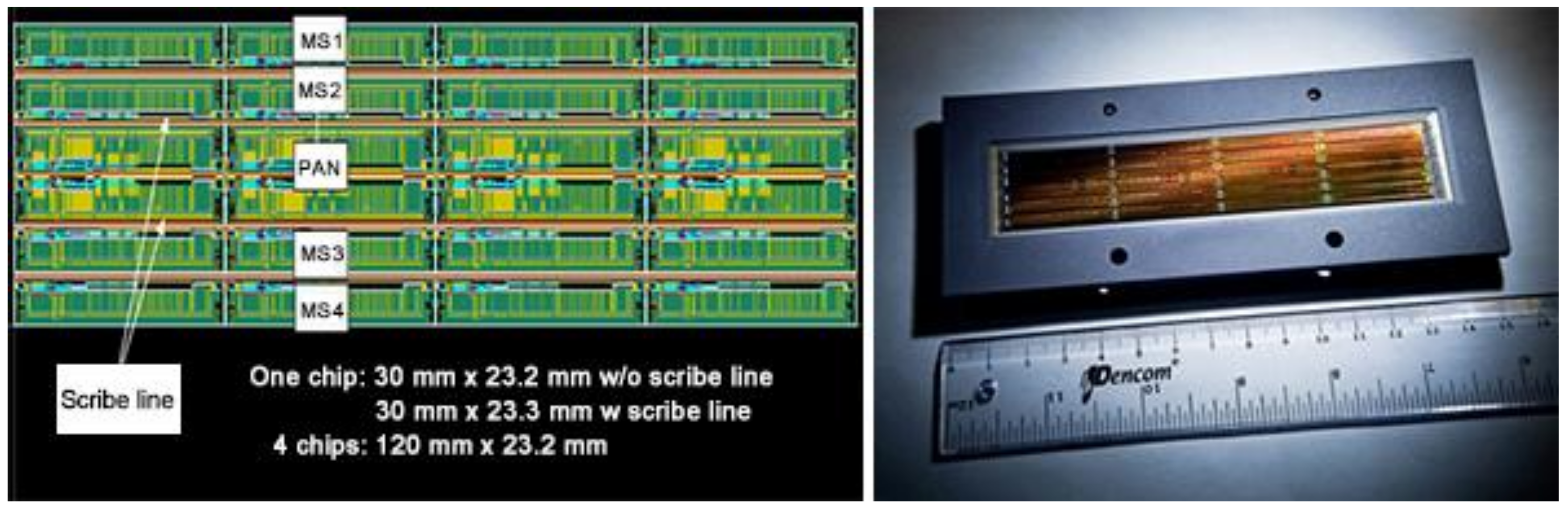
5]. The FS-5 satellite—launched on 25 August 2017—operates in a sun synchronous orbit at an altitude of 720 km with a 98.28-degree inclination angle. The primary payload of FS-5, the RSI optical imager, is equipped with a 2-m resolution panchromatic (PAN) band and 4-m resolution multispectral (MS) bands (PAN band with 12,000 pixels and MS bands with 6000 pixels each). Instead of a traditional CCD (charge-coupled device), a CMOS (complementary metal oxide semiconductor) is employed for the RSI as shown in
Figure 2. FS-5 also hosts a secondary scientific payload, the Advanced Ionospheric Probe (AIP) developed by Taiwan’s National Central University.
Radiometric and geometric calibration are the two essential image procedures that ensure the high-resolution sensor RSI onboard FS-5 serves its fullest function and application ability, especially for the first half year right after the satellite launch (see also
Figure 1). Radiometric calibration is the process of converting the radiometric intensity received by a sensor into a meaningful physical unit for analysis. This task includes absolute radiometric calibration of the sensor as a whole and relative radiometric calibration among detector chips of the sensor. It is a common practice globally to perform both absolute and relative radiometric calibrations after the launch of a satellite in order to maintain and ensure the high quality of the images provided [
6,
7,
8,
9,
10,
11,
12,
13].
The initial goal of relative radiometric calibration is to remove the uneven responses among the detector chips of a satellite sensor. The non-uniformity and imperfection presented between detectors may come from various sources, such as slight changes in spectral and linear reactions, the error of offset and gain caused by the operational dark current, varying focal plane temperatures, and the electronic instability of the integrated circuit (IC) chip package, etc. [
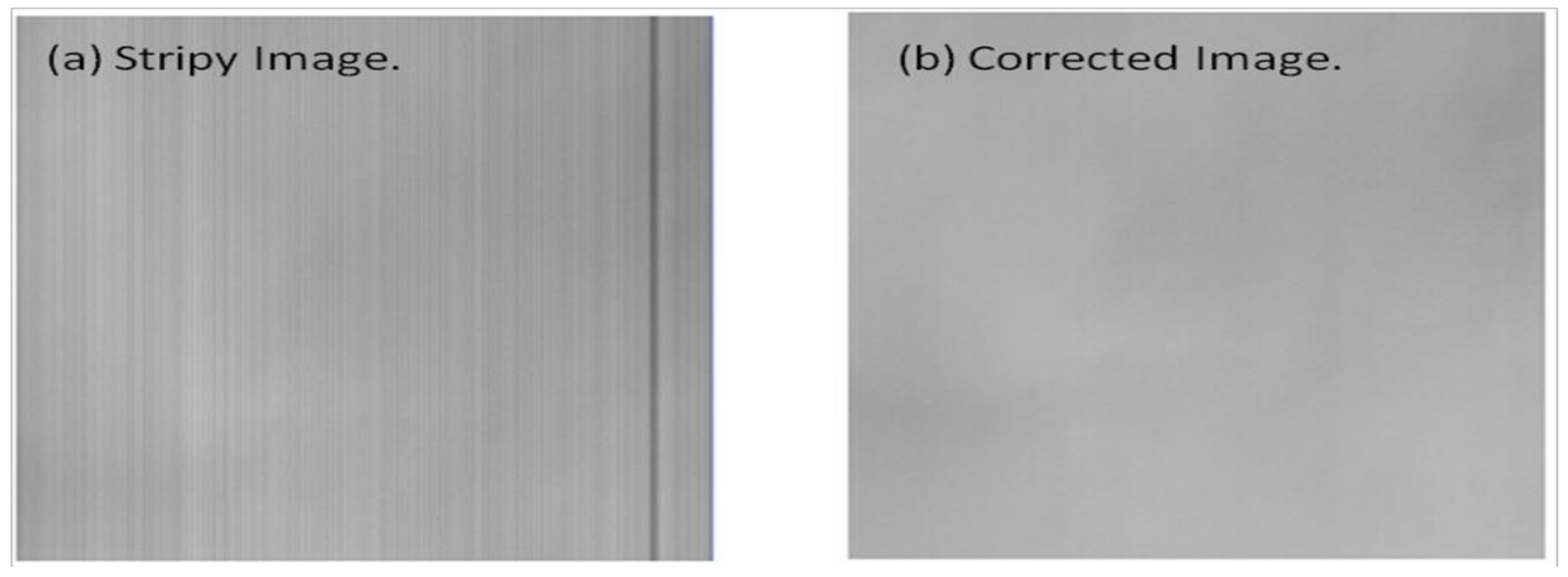
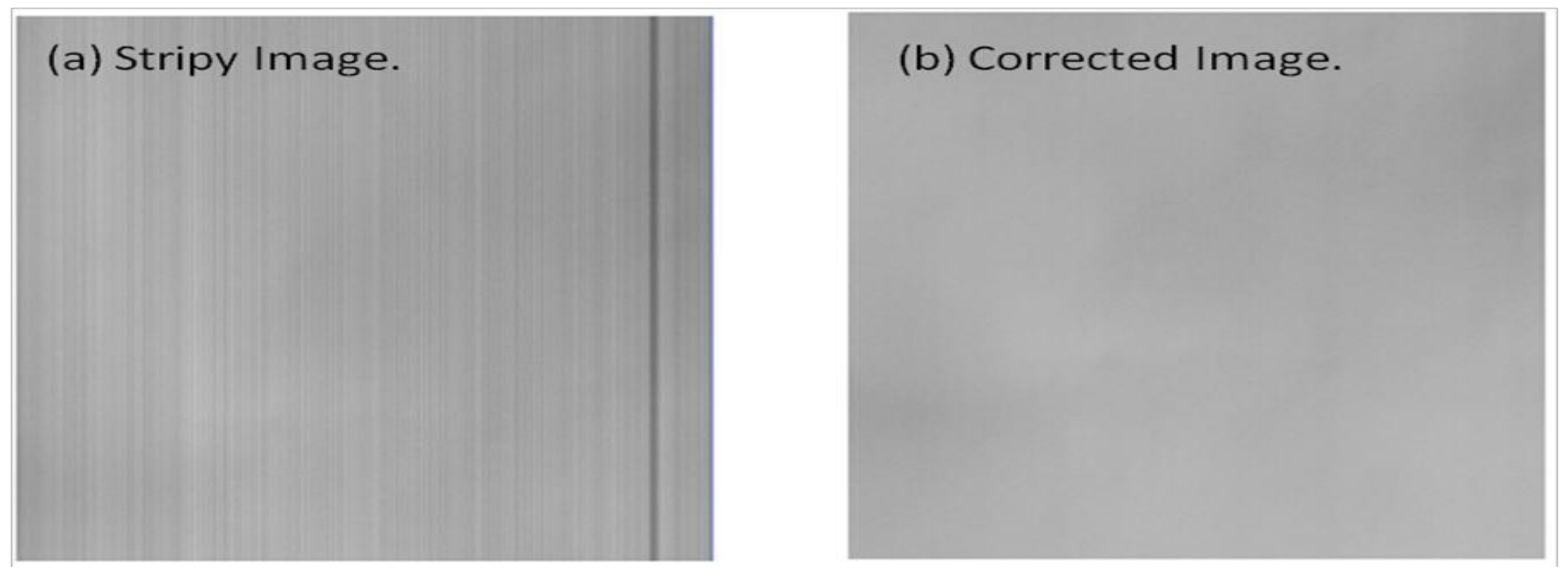
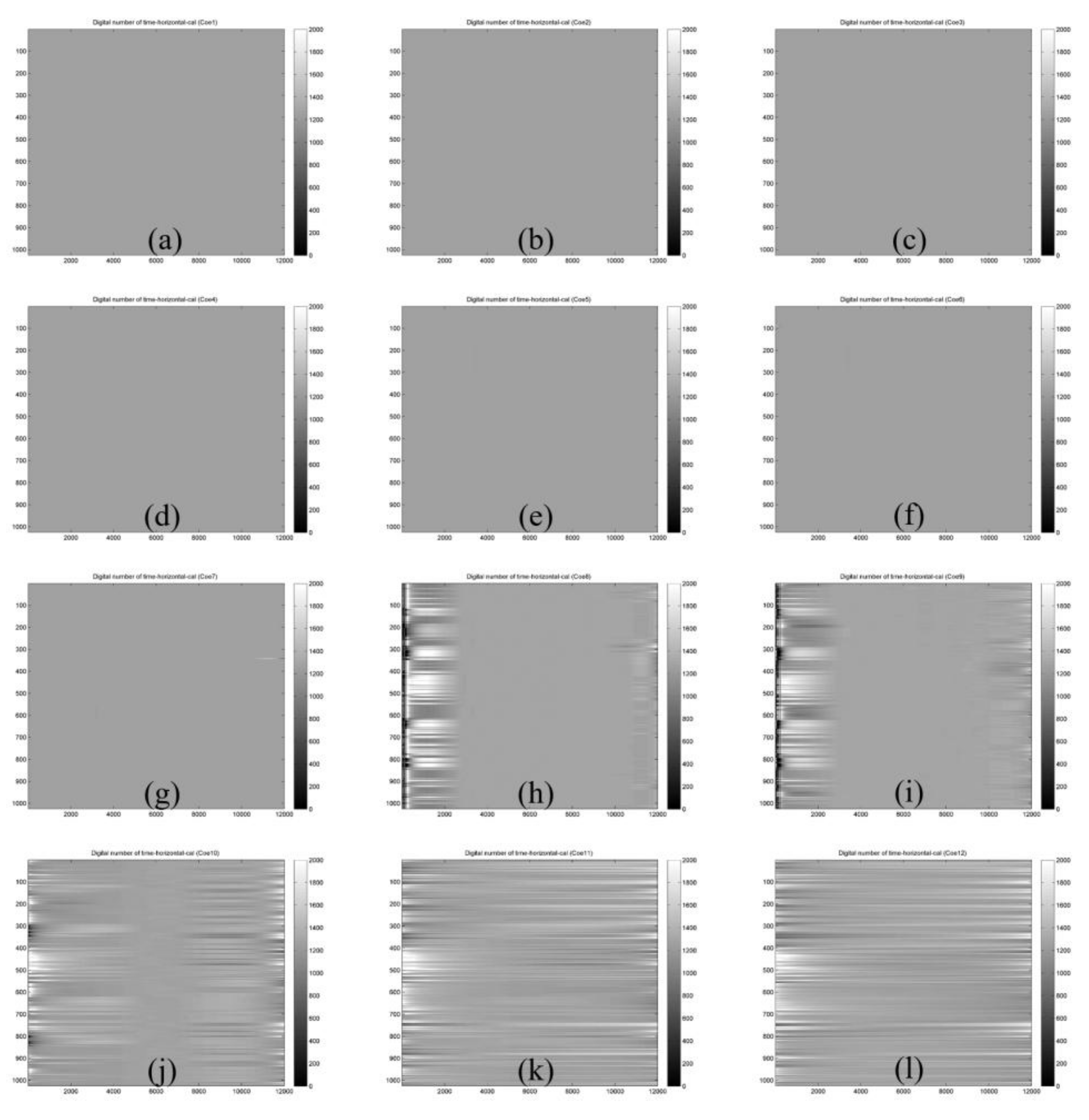
14]. The sensor’s non-uniformity generally leads to noisy striping or banding on satellite images. Besides, the fringe phenomenon of imagery may come from the interference of the imagery dataset during the process of transmission and storage. Possible sources of interference include periodic drift or mechanical failure of the sensor, electronic interference from sensor electronics, interruption in data transfer and storage, etc. Image artifacts such as striping (as shown in
Figure 3a) and banding are not desired as they contaminate the radiometric information acquired. Hence, the preprocessing of imagery, such as the steps of removing image striping and banding, is necessary prior to any further applications (e.g.,
Figure 3b). In addition, the number of sensor arrays in satellite sensors is generally increasing with the advancement of satellite-imaging technology, introducing a higher complexity of detector chips as well as an urgent quest for accurate relative radiometric calibration [
6,
15,
16,
17].
There are currently two mainstream approaches for the relative radiometric calibration of satellite sensors [
6]. The first is the method of lifetime image statistics, which is based on the relationship between the grayscale value of individual detector chips in the sensor array and the observed radiance. It is employed to statistically obtain the relative gain among the overall sensor and individual chips. Then, the mean and standard deviation (STD) of the imagery are calculated to perform the relative radiometric calibration via images of different periods in line with histogram distribution [
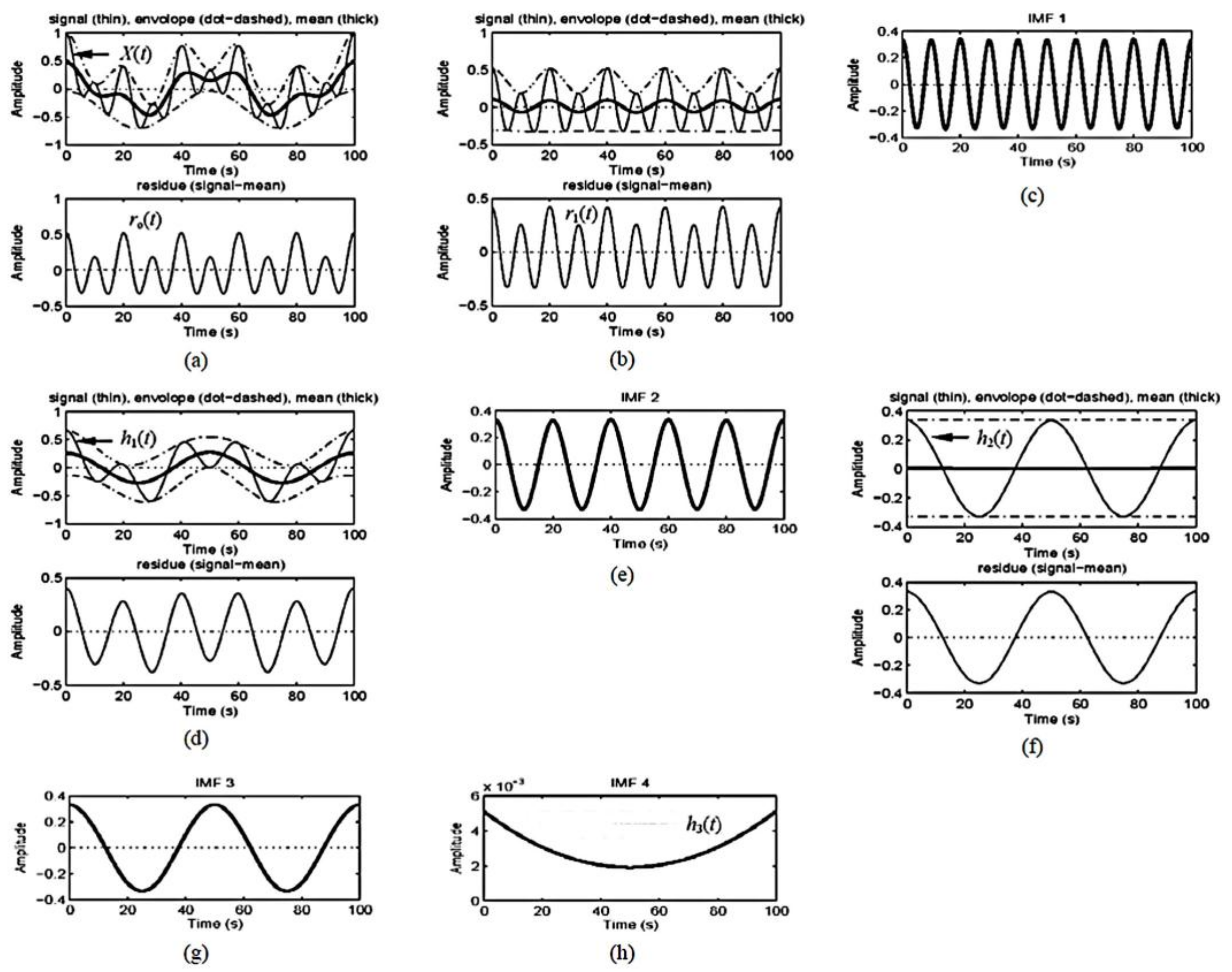
17]. The other method involves applying a filter that decomposes images and extracts data characteristics in different frequency domains by using signal waveform filtering, such as horizontal, vertical, high, and low frequencies. The resulted information extracted after filtering is then reconstructed into new images. This approach is elaborated in work of Hsu et al. in the on-orbit radiometric calibration of FS-2 RSI [
4,
18].
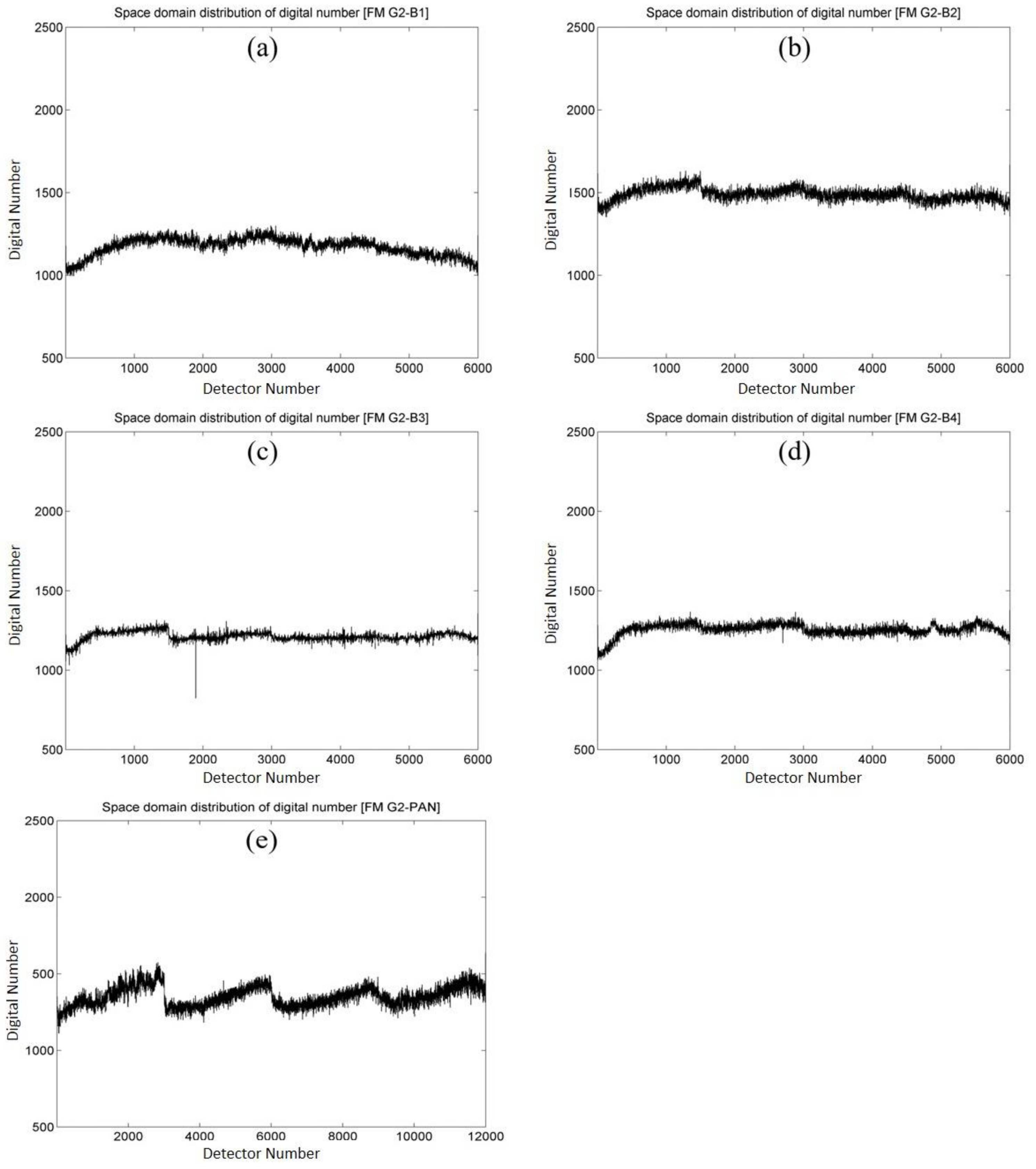
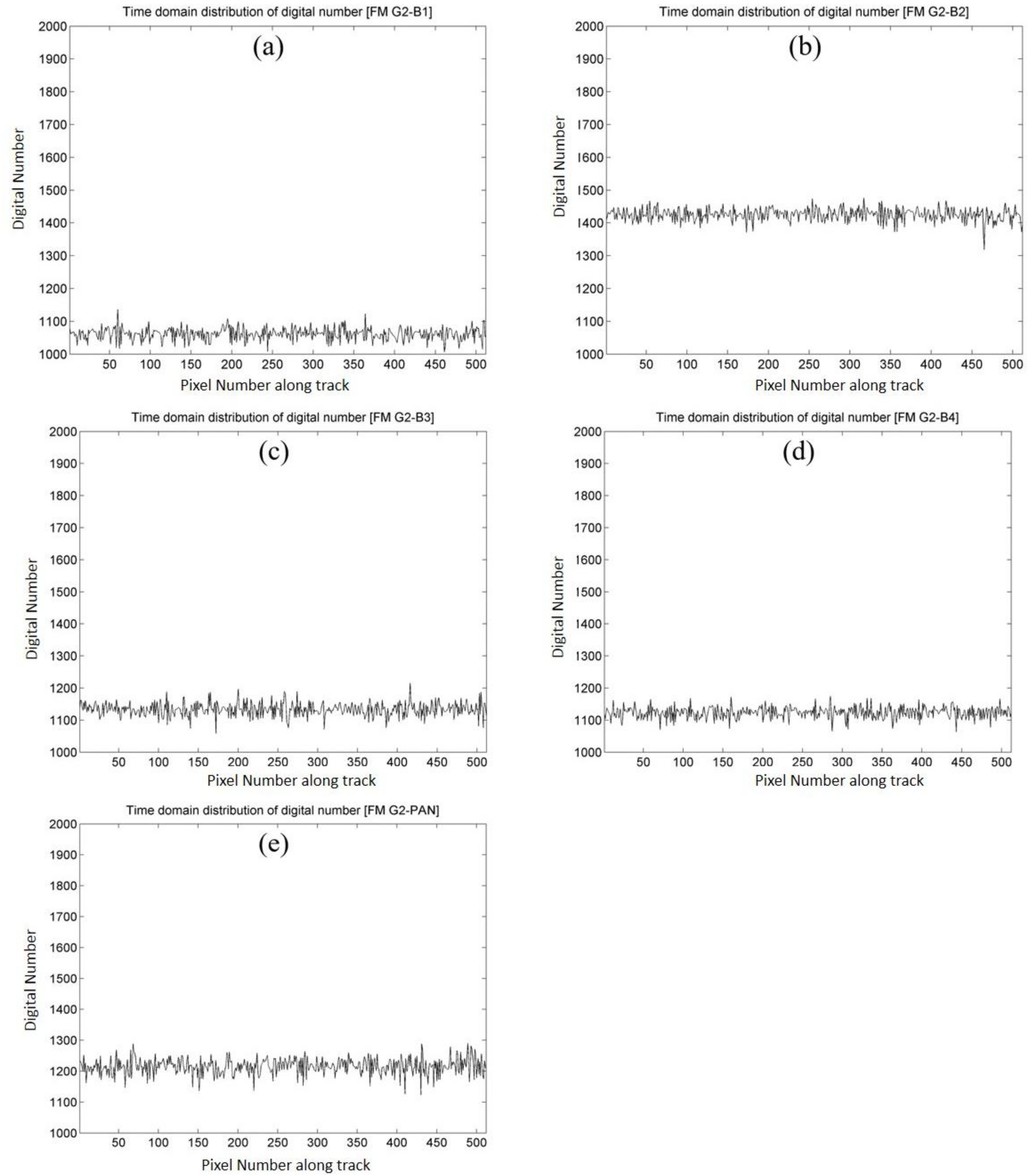
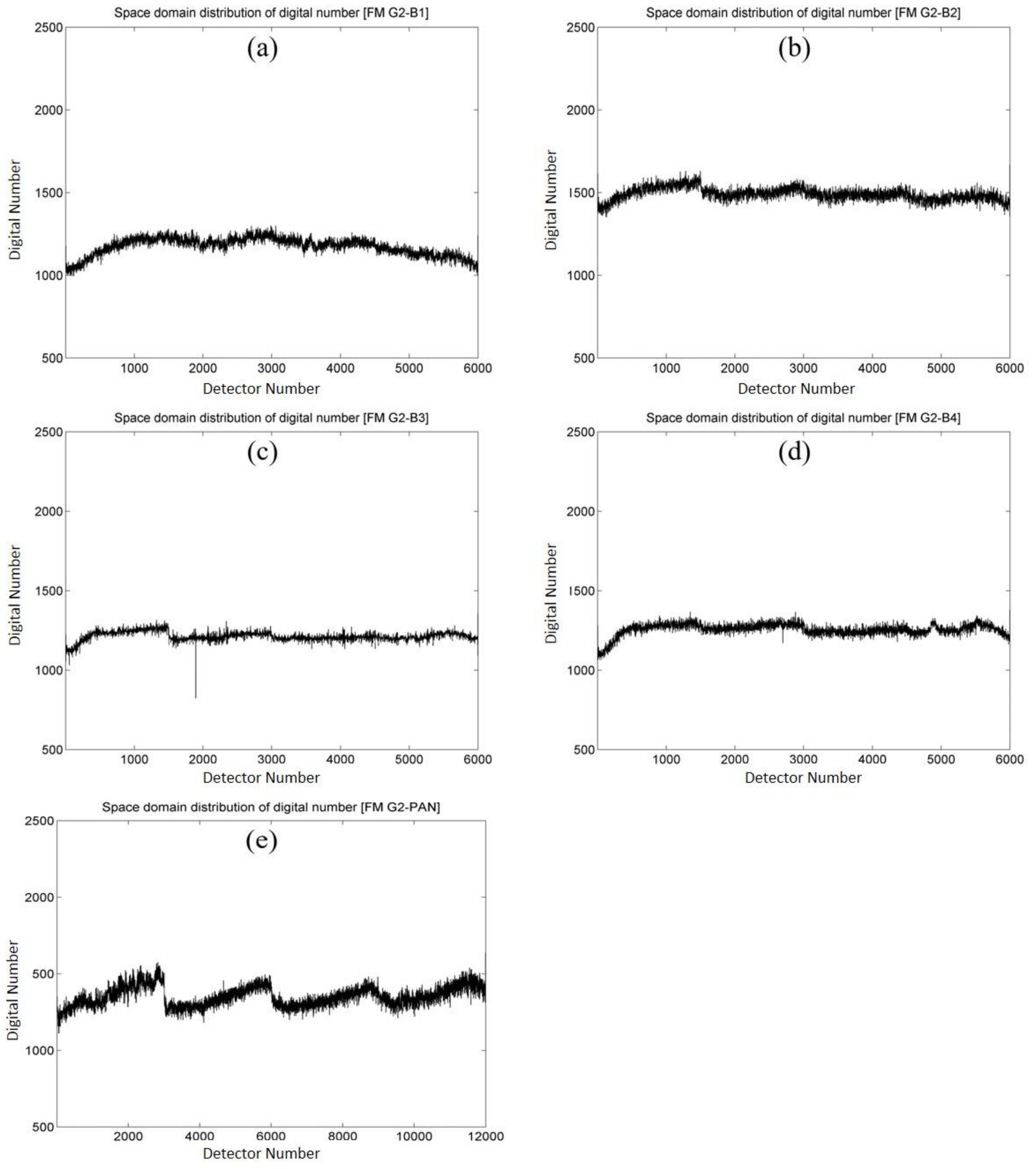
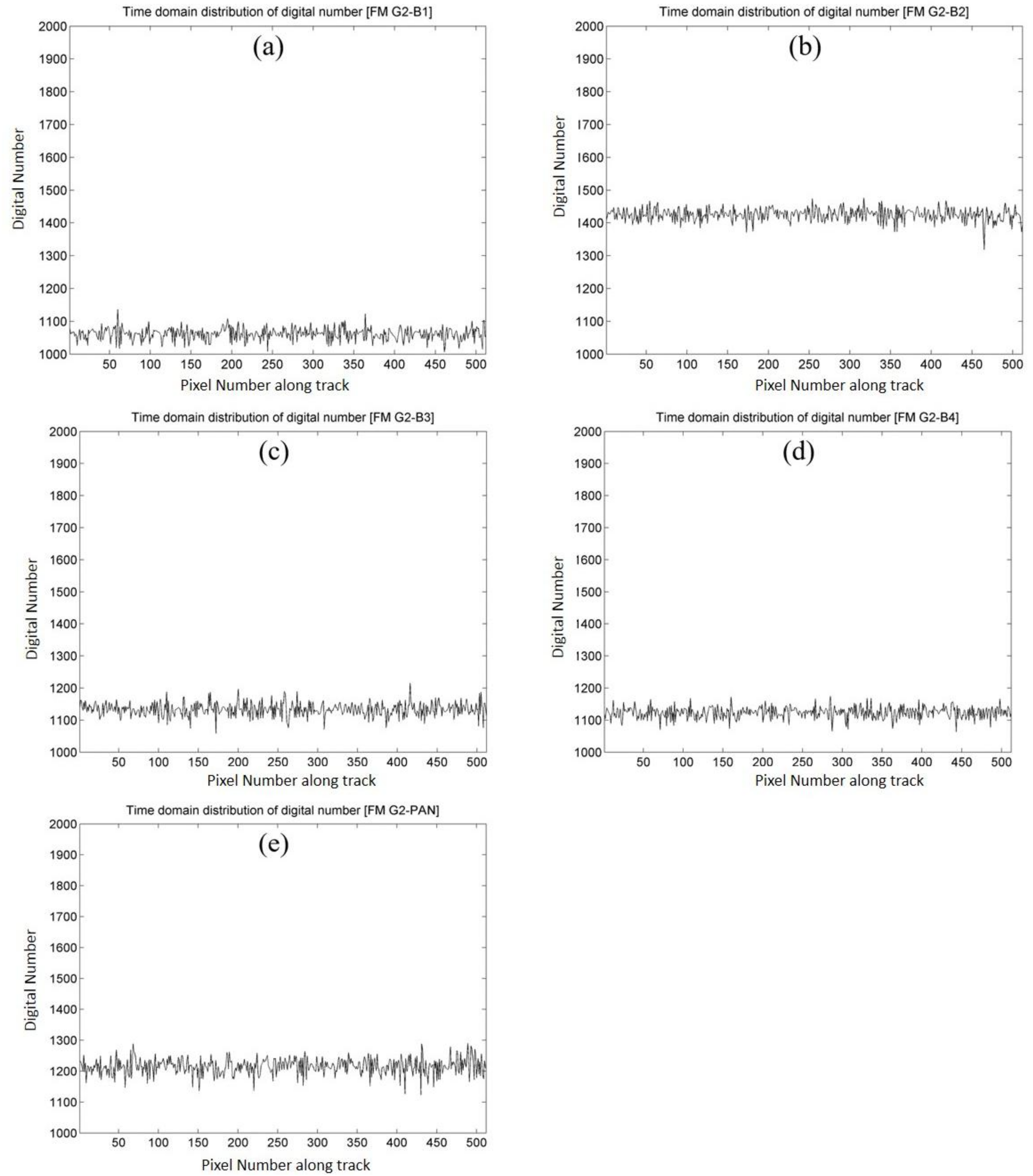
The approaches mentioned above are generally focused on the calibration of sensor detectors, addressing the density (pixel values) calibration in spatial variation of the image. However, an imperfect sensor’s performance may vary both temporally and spatially. The non-uniformity of a detector response exists not only in the spatial variation but also in the temporal variation, which appears in FS-5 imagery. Thus, a decent calibration method able to retrieve accurate at-sensor grayscale values is necessary [
19,
20]. However, in reviewing current worldwide practices on relative radiometric calibration over optical satellite sensors [
21,
22,
23,
24,
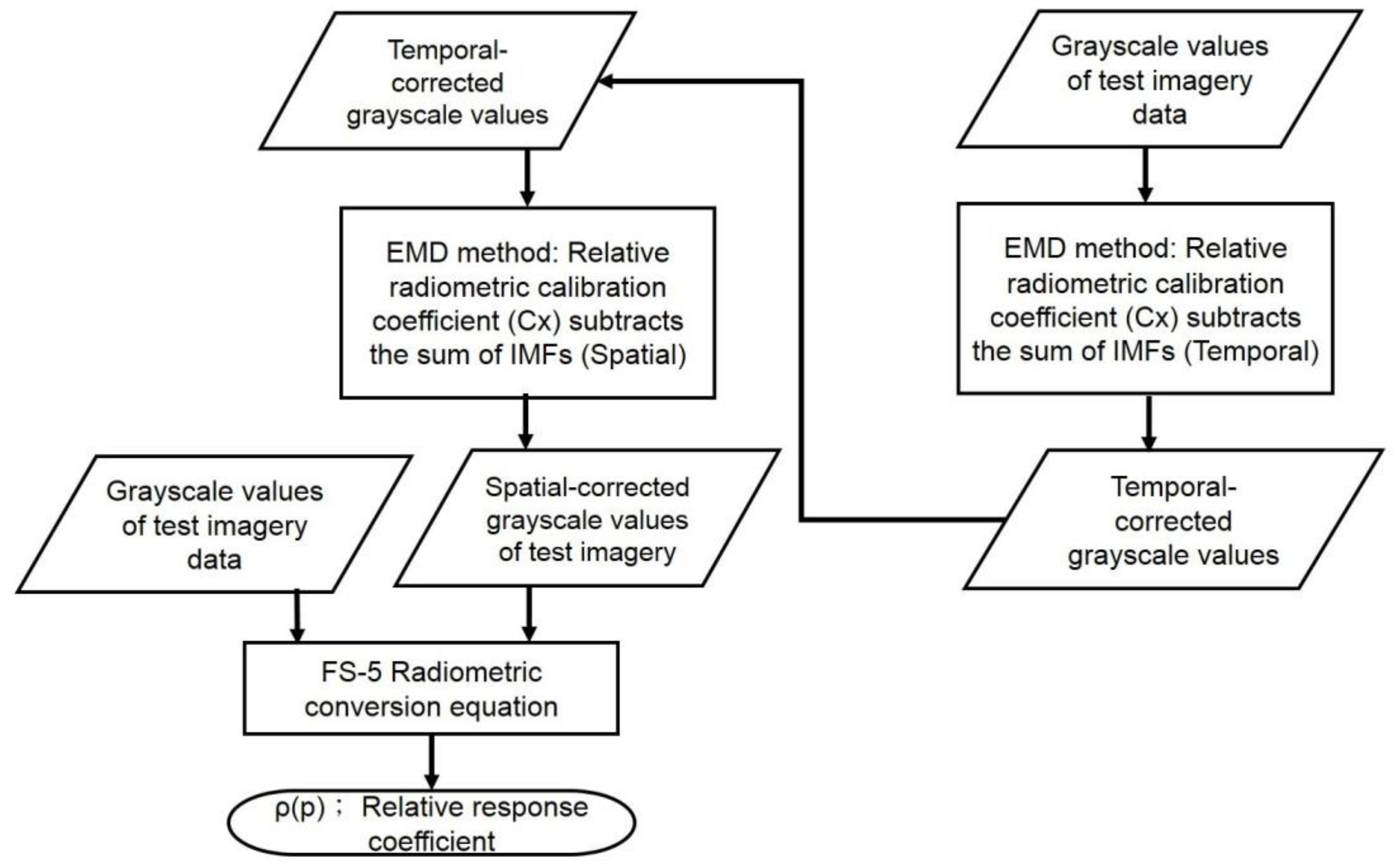
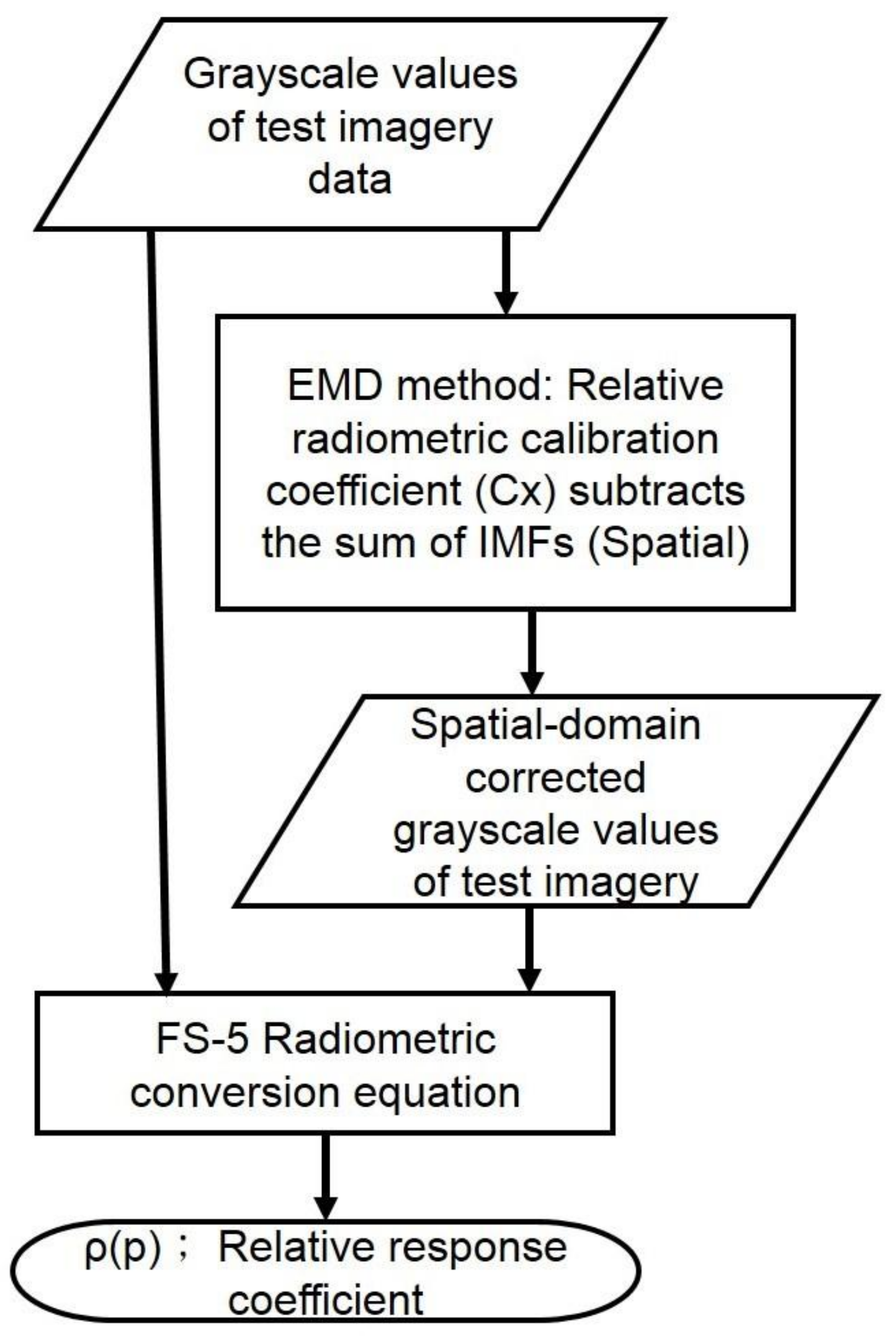
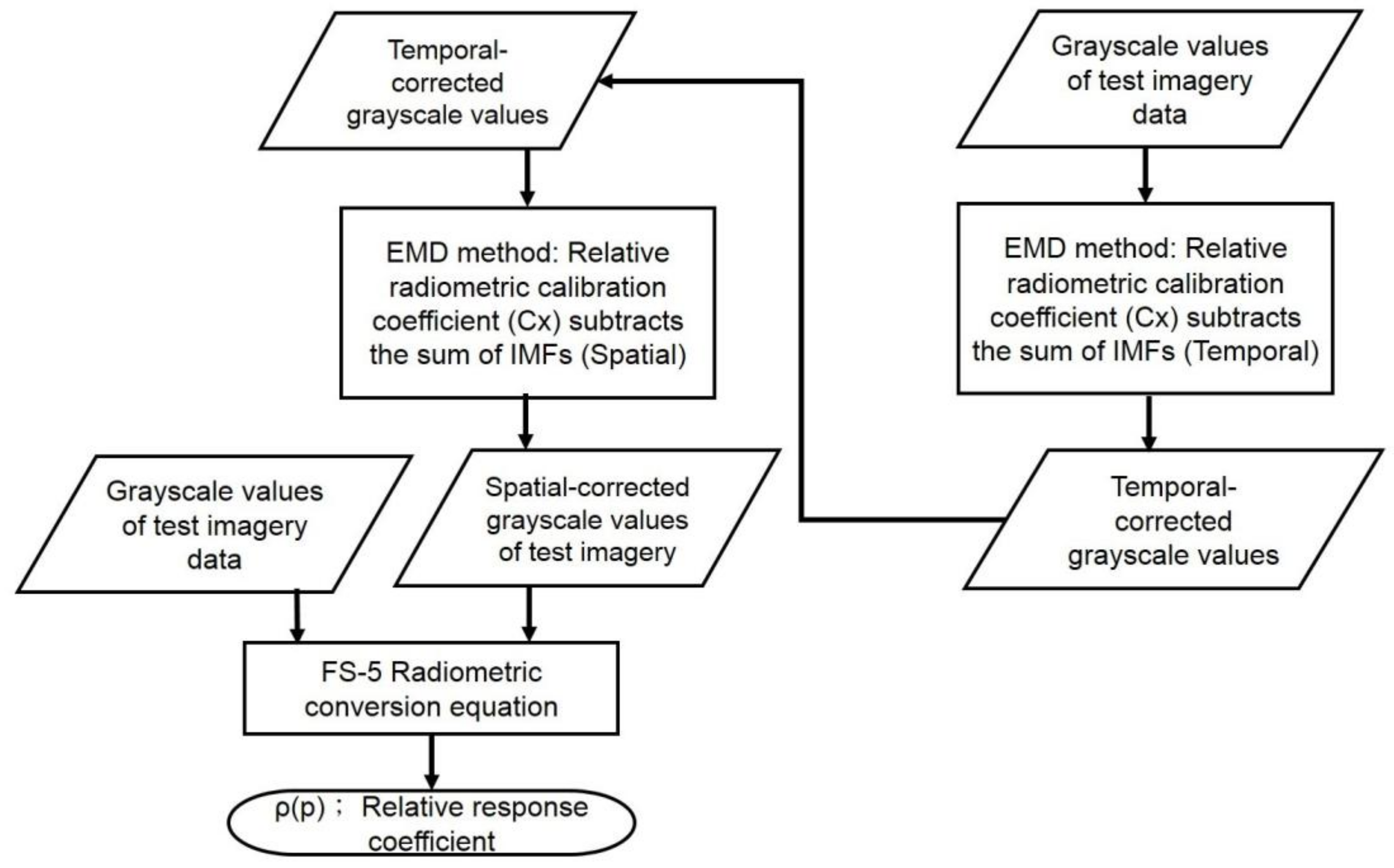
25], there is no previous research to specifically handle calibration in the temporal density variation during image acquisition time period. Image calibration generally includes the spatial calibration (in real-world terms of pixel size or distance) and density calibration (in terms of pixel values). Here we intend to conduct density calibration both spatially and temporally on the single-image basis for removing the striping and banding noises. Therefore, this study aims to propose a new approach to relative radiometric calibration both in temporal and spatial variations by using an FS-5 pre-flight test imagery dataset, in an attempt to establish an effective calibration procedure for on-orbit relative radiometric calibration as well as to provide the calibration coefficient for sensors in all bands and evaluate their post-flight/on-orbit changes accordingly. This new method is expected to facilitate the application of related downstream products and data services of the FS-5, and to advance the technology used in the relative radiometric calibration of satellite sensors.
4. Conclusions and Future Work
The FS-5 RSI is the successor to the FS-2 RSI, providing high spatial-resolution imagery at the global scale for environmental resources and disaster-monitoring services. The quality of FS-5 RSI imagery is thus essential to the capability of its further applications. Because the pre-processing system for the testing of both geometric and radiometric data is not yet ready, the mission of FS-5 RSI is still pending at this moment. The approach of relative radiometric calibration proposed in this study could be a great benefit to the radiometric pre-processing procedure for FS-5 RSI on-orbital imagery. The results in comparison with those provided by the NSPO reveal that the proposed approach, the EMD–HHT method, can be expected to offer near real-time calibration for the maintenance of the relative response coefficient after FS-5 RSI operation. According to the EMD–HHT method conducted on FS-5 RSI images in the digital mode and flying mode, the following conclusions have been drawn:
- (1)
The striping and banding noises of FORMOSAT-5 RSI imagery may be caused by inconsistencies between detector chips and electronic instability in the spatial and temporal variations.
- (2)
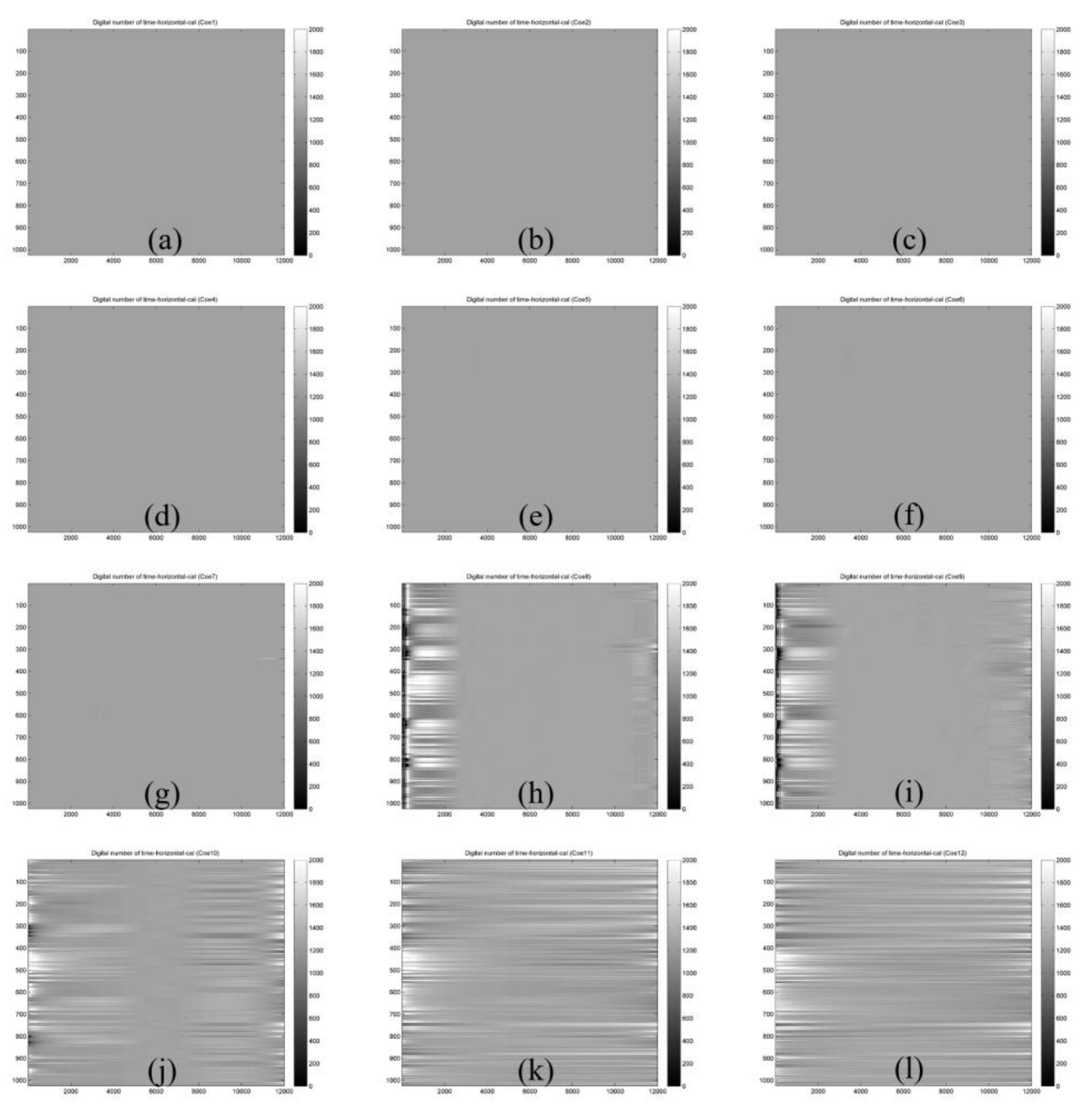
The calibration of the temporal variation to stabilize essential IMFs of the spatial variation is suggested, although the temporal variation of each detector is relatively small.
- (3)
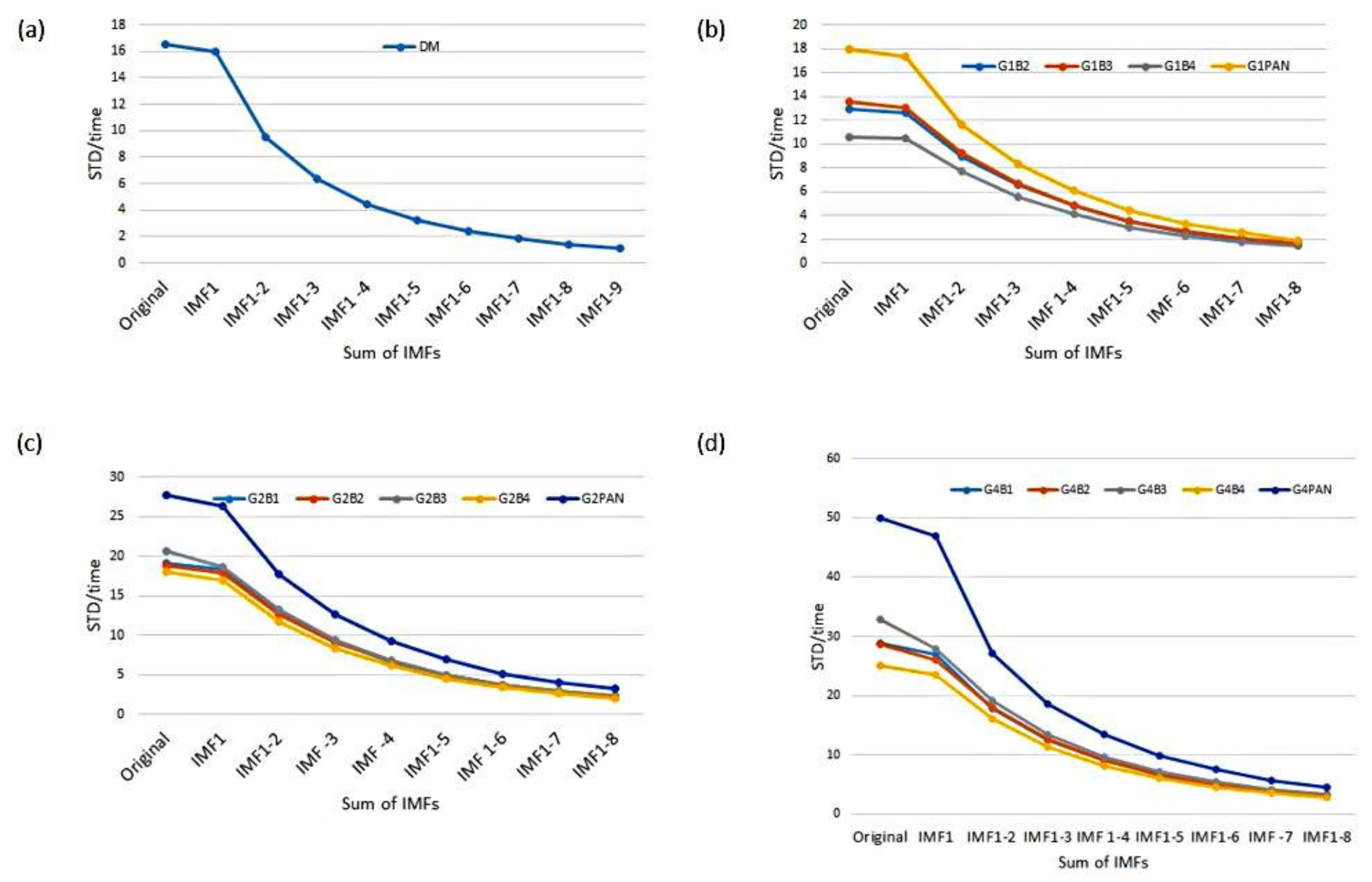
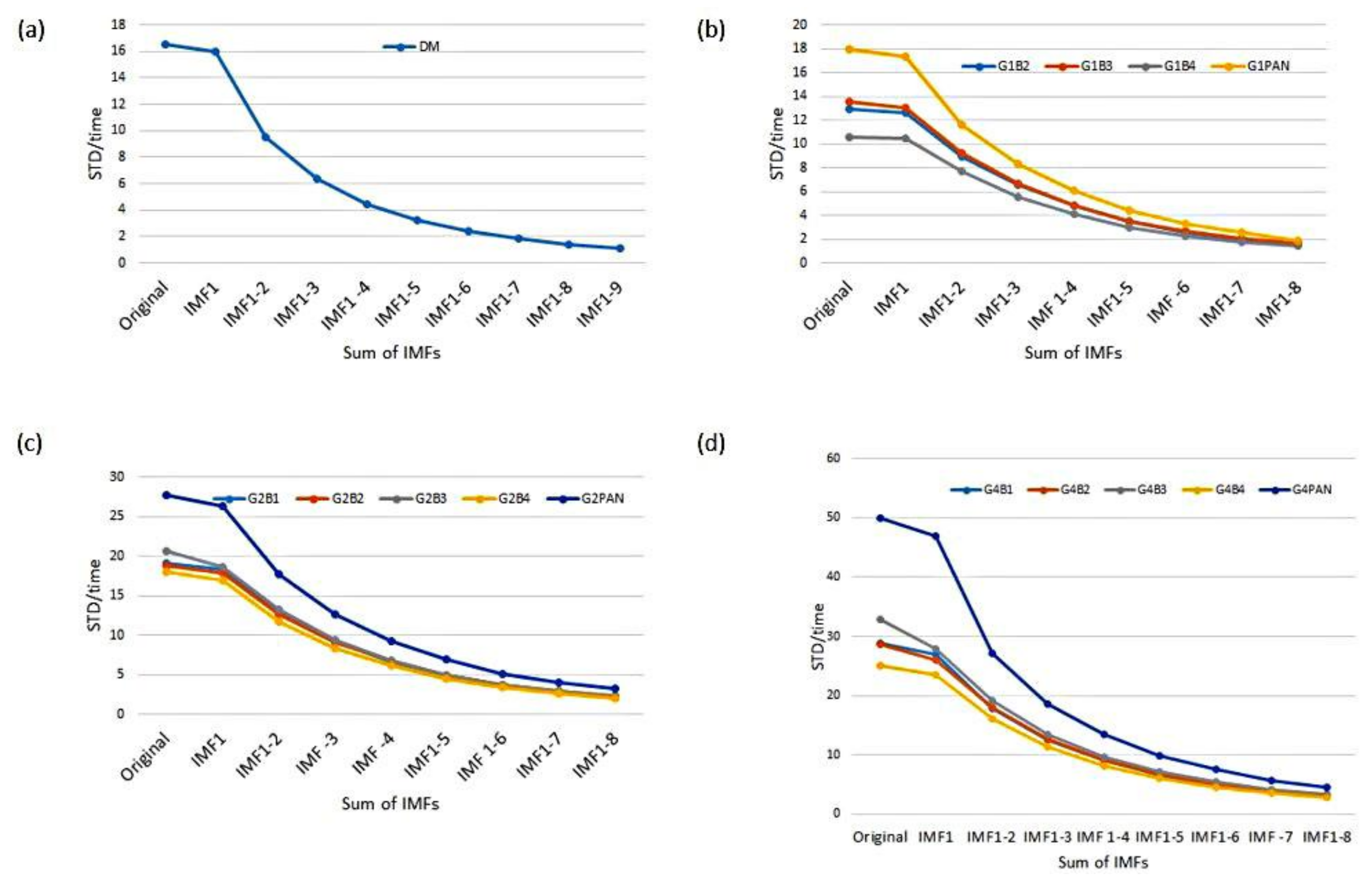
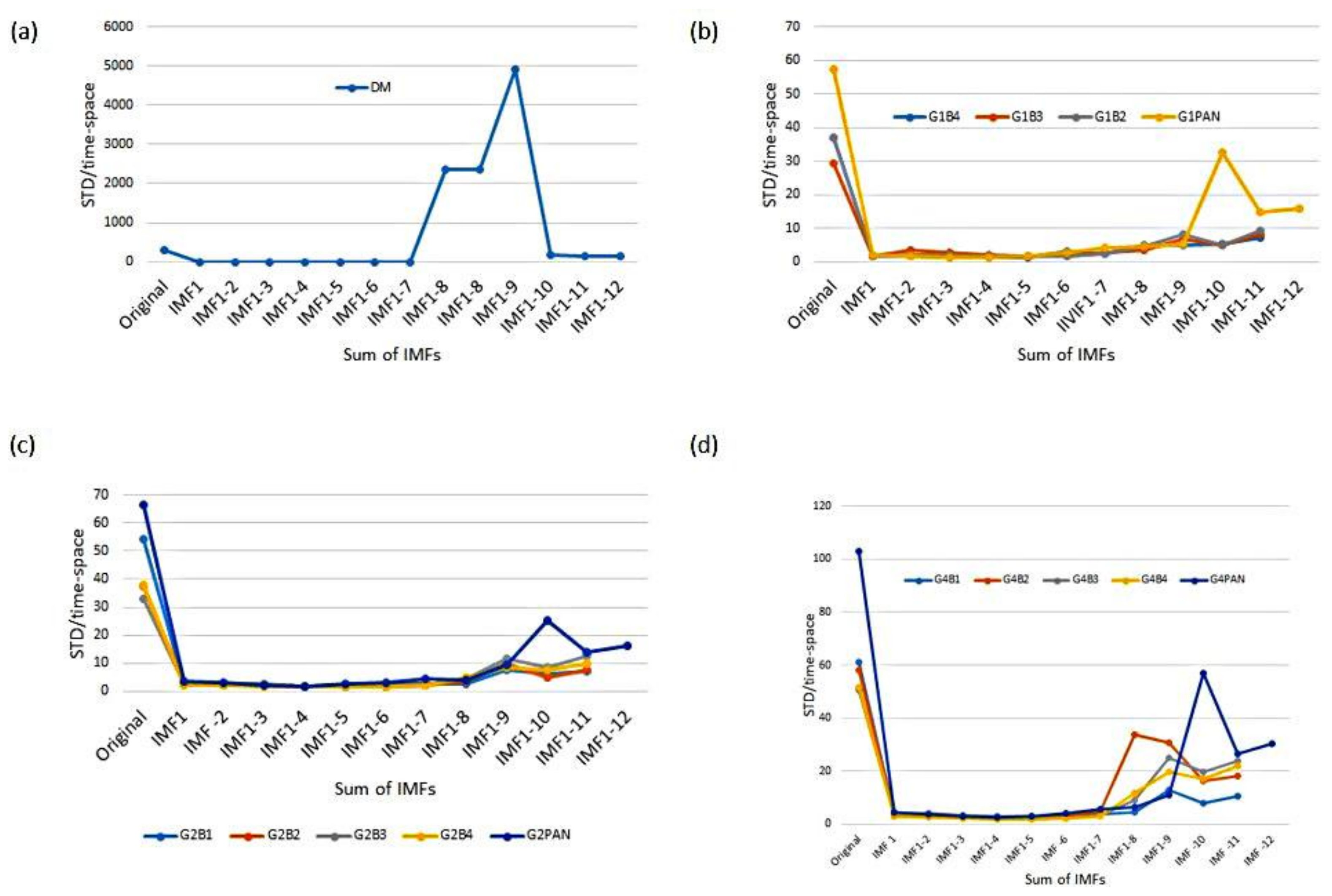
Testing results show that the EMD–HHT method of relative radiometric calibration proposed in this study is able to eliminate the striping and banding of the test imagery dataset caused by the non-uniformity of sensors. The overall improvement rate is over 95% for all spectral bands and gain settings. The temporal relative radiometric calibration subsequently reduces the accumulative numbers of IMFs required for filtering as well as the post-calibration mean STD, indicating the significance of and need for relative radiometric calibration in the temporal variation.
- (4)
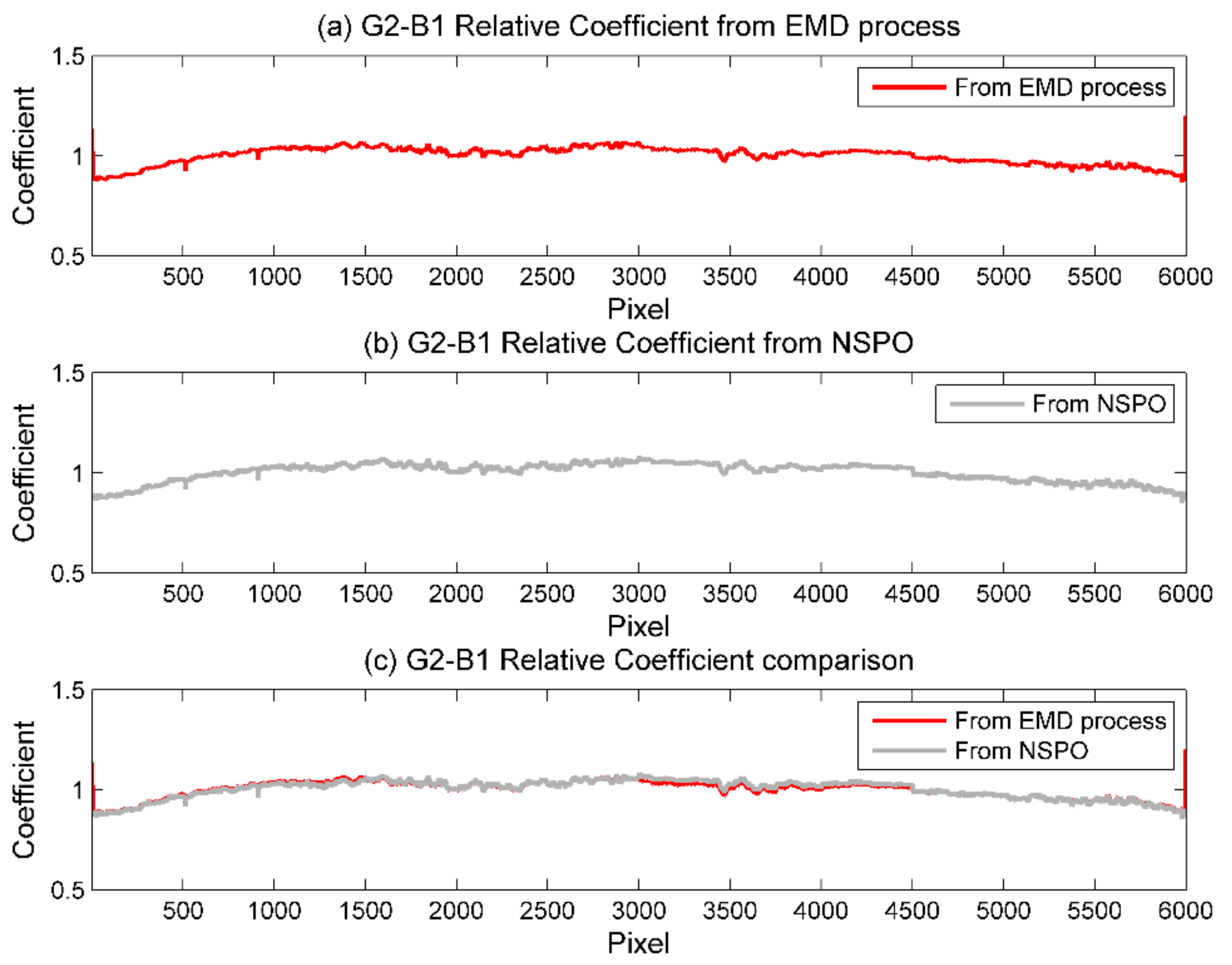
In comparing the relative response coefficients of images from flying mode sensors (examined with a standard light source only), the mean error between results of the EMD–HHT approach and that provided by the NSPO was 0.006%. This shows that EMD–HHT for the relative radiometric calibration of FS-5 RSI sensors is highly effective and its transferability to other sensors is promising as well.
- (5)
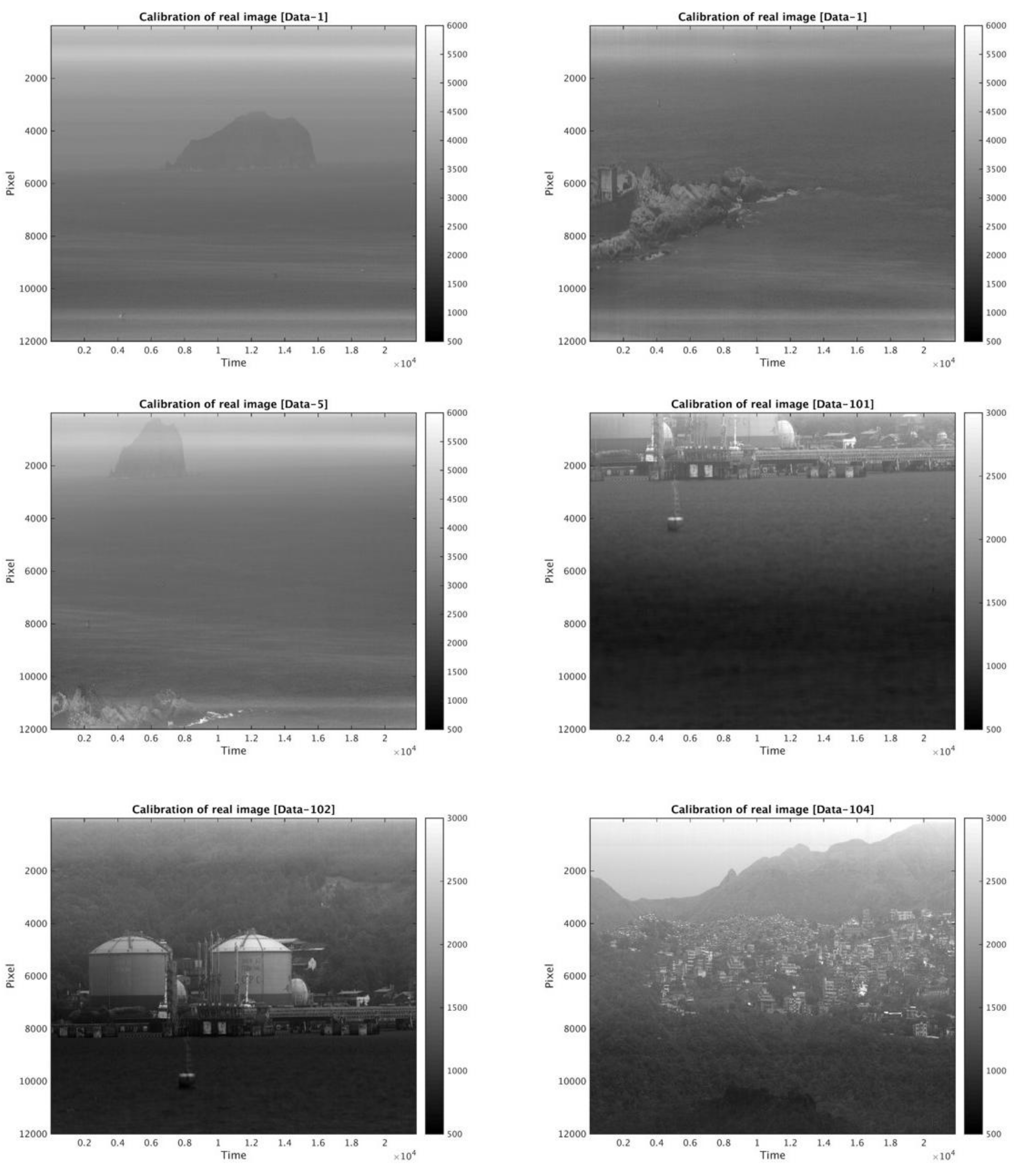
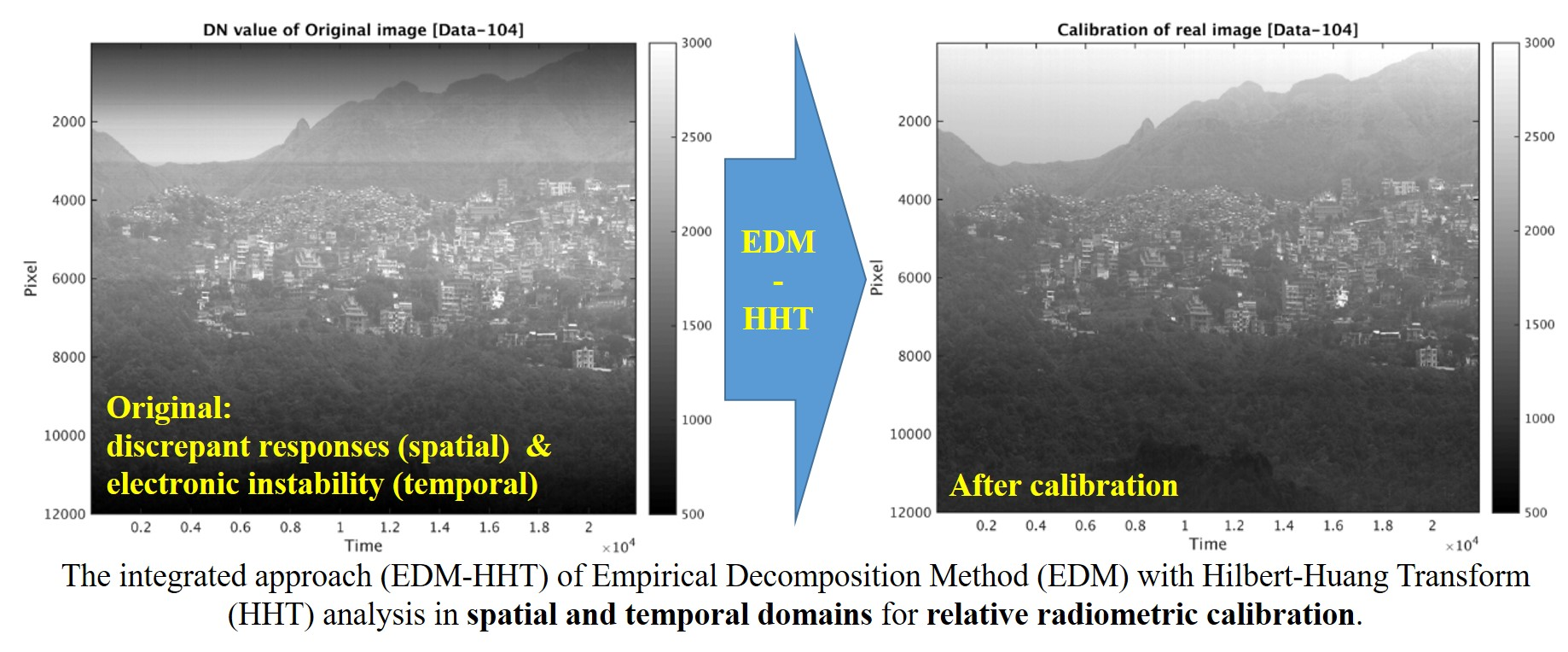
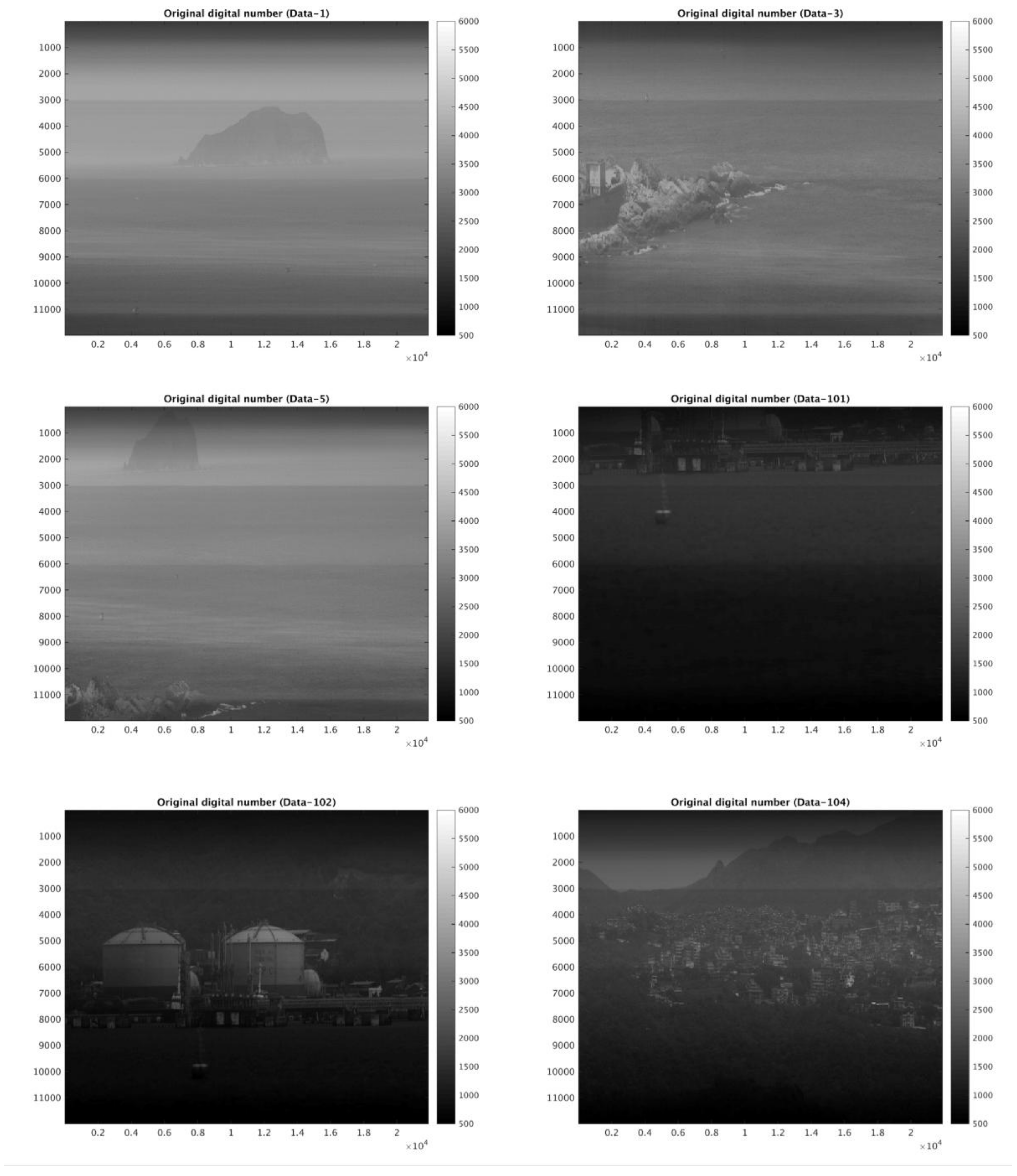
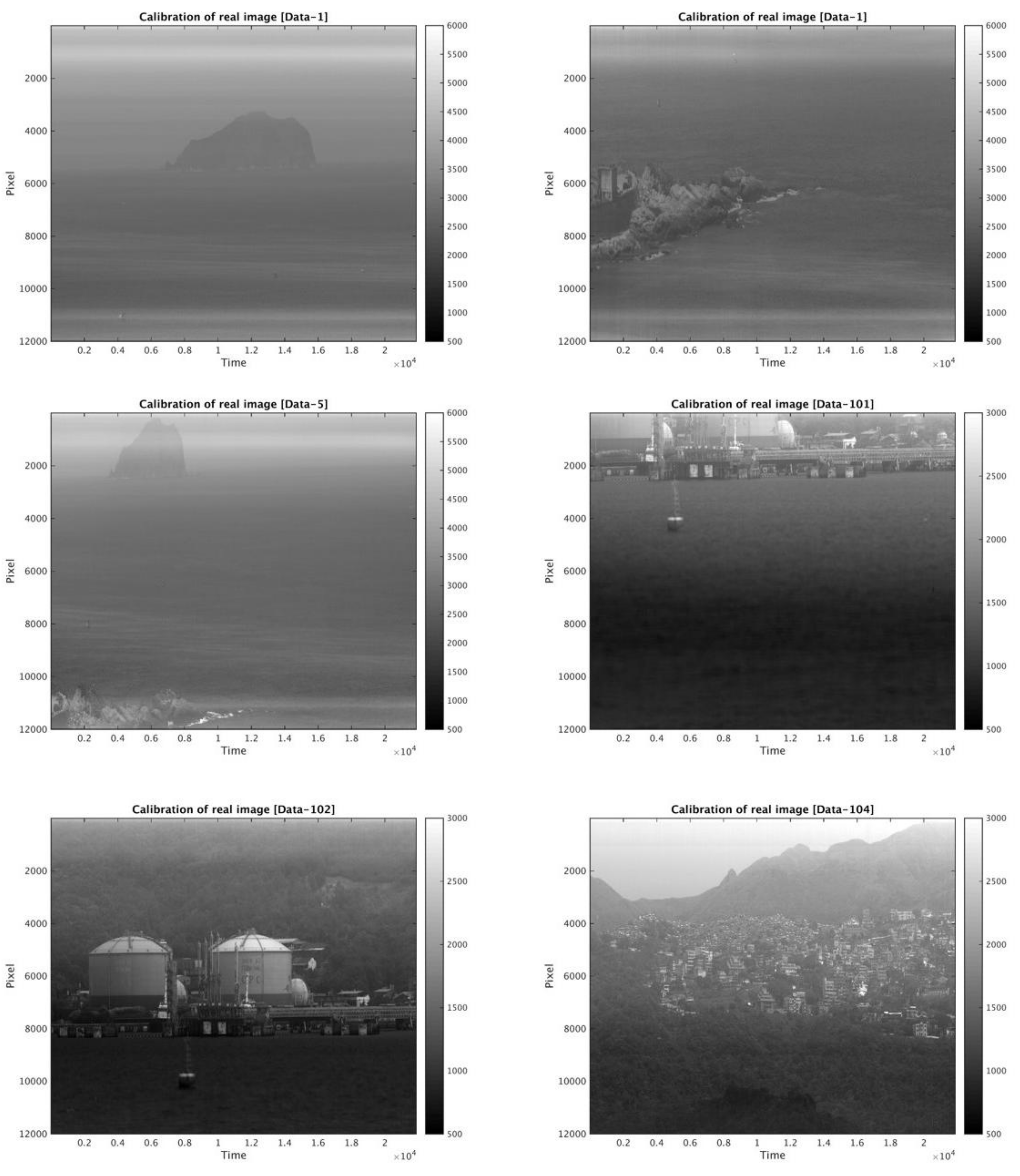
For digital mode sensors, relative response coefficients are derived from the images viewed with a uniform light source, and then applied to the field images in order to filter out the striping and banding noises. The results, as demonstrated in
Figure 14, indicate that the EMD–HHT process is highly applicable to the on-orbit relative radiometric calibration of FS-5 RSI.
On a final note, the discrepant response between detectors in the spatial variation is more straightforward than the instability caused by the electronic system in the temporal variation. That is, the relative discrepancy in the spatial variation is basically fixed while the electronic instability in the temporal variation may be varied. The identification of the periodic cycle of fluctuation in the electronic system is significant to the relative calibration in the temporal variation. Therefore, exploring the fluctuating cycle of the electronic system with on-orbit FS-5 RSI images over uniform surface areas for the application of the EMD–HHT method for relative radiometric calibration is the next step in this field of research.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}