A New Method of High-Precision Positioning for an Indoor Pseudolite without Using the Known Point Initialization

 , , , ,
, , , , 
Abstract
1. Introduction
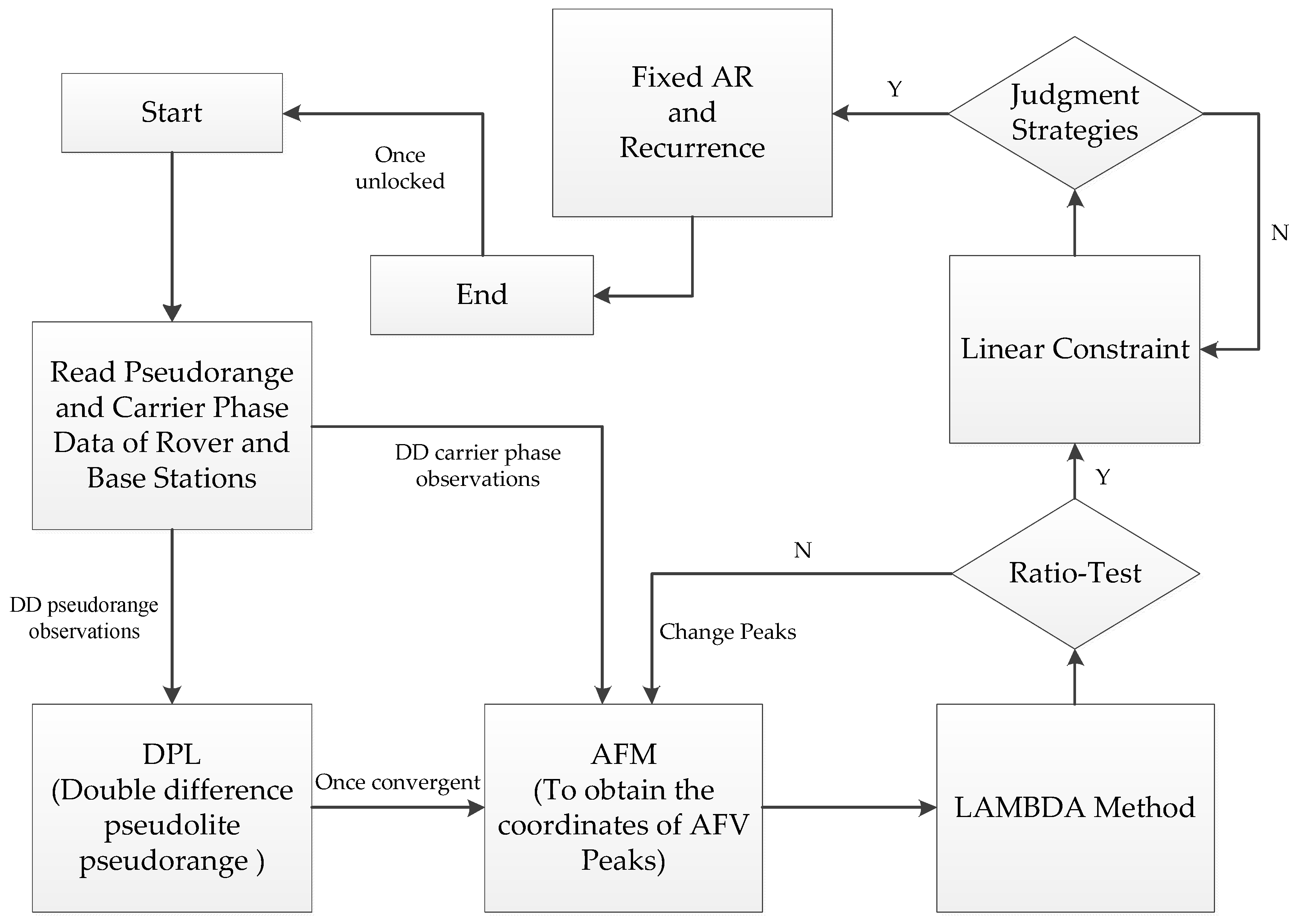
2. Algorithm
2.1. Double Difference Observation Model in the Pseudolite System
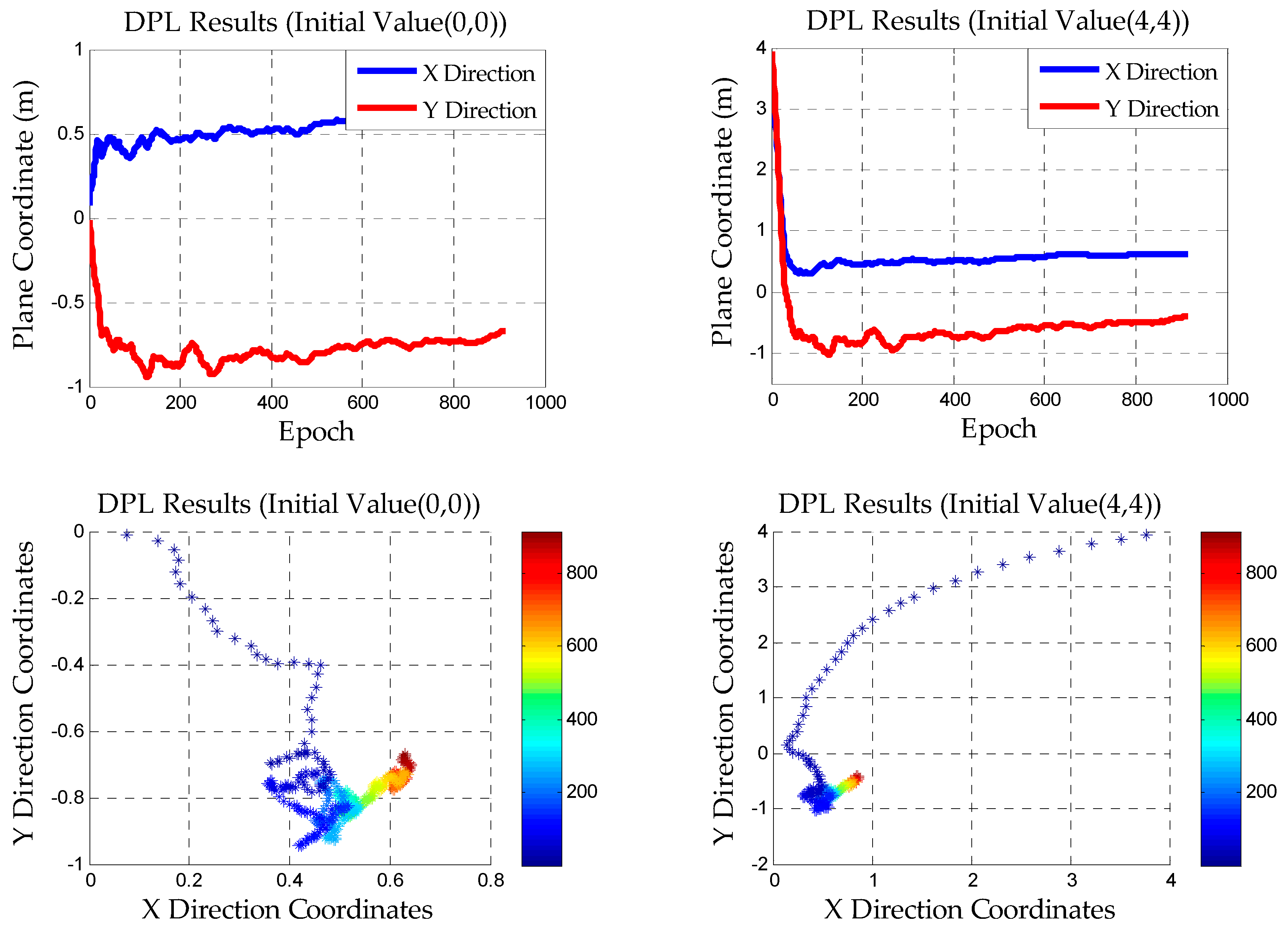
2.2. Acquisition of Initial Coordinates by DPL
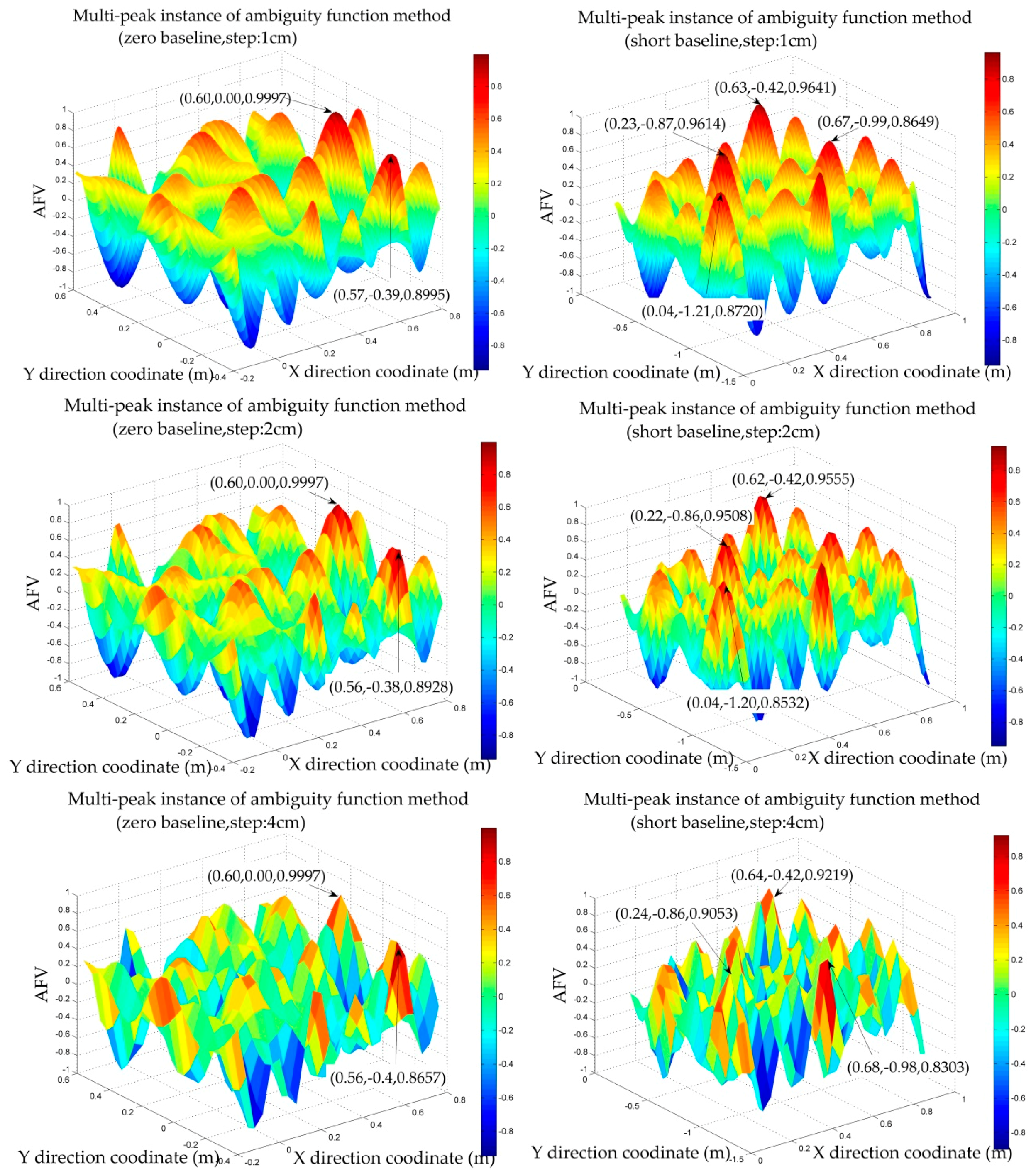
2.3. Refinement of the DPL Convergent Coordinates by AFM
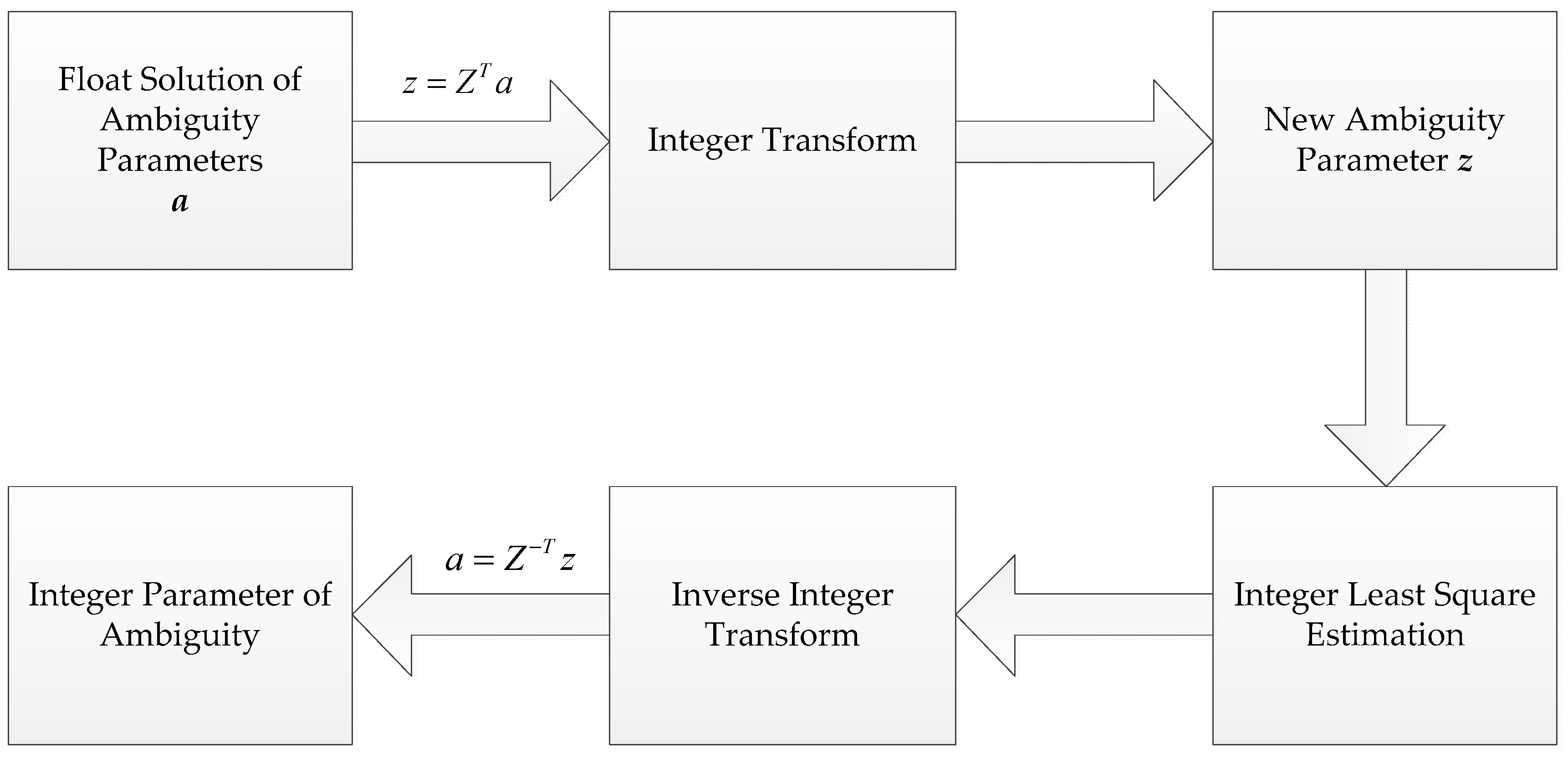
2.4. LAMBDA Method
2.5. Kalman Filter
3. Experiment and Analyses
3.1. Analyses of Static Experiments
3.1.1. Accuracy Analyses of Observations
3.1.2. Results of Pseudolite Differential Pseudorange Positioning
3.1.3. Results of AFM and the Exploration of Efficiency and Reliability
3.1.4. Results of the Static Experiments after the Ambiguities are Fixed
3.2. Analyses of the Dynamic Experiment
3.2.1. The Convergence Results of Static Initialization and Large Peaks of AFM
3.2.2. The Linear Constraint to Recognize the Real Peak
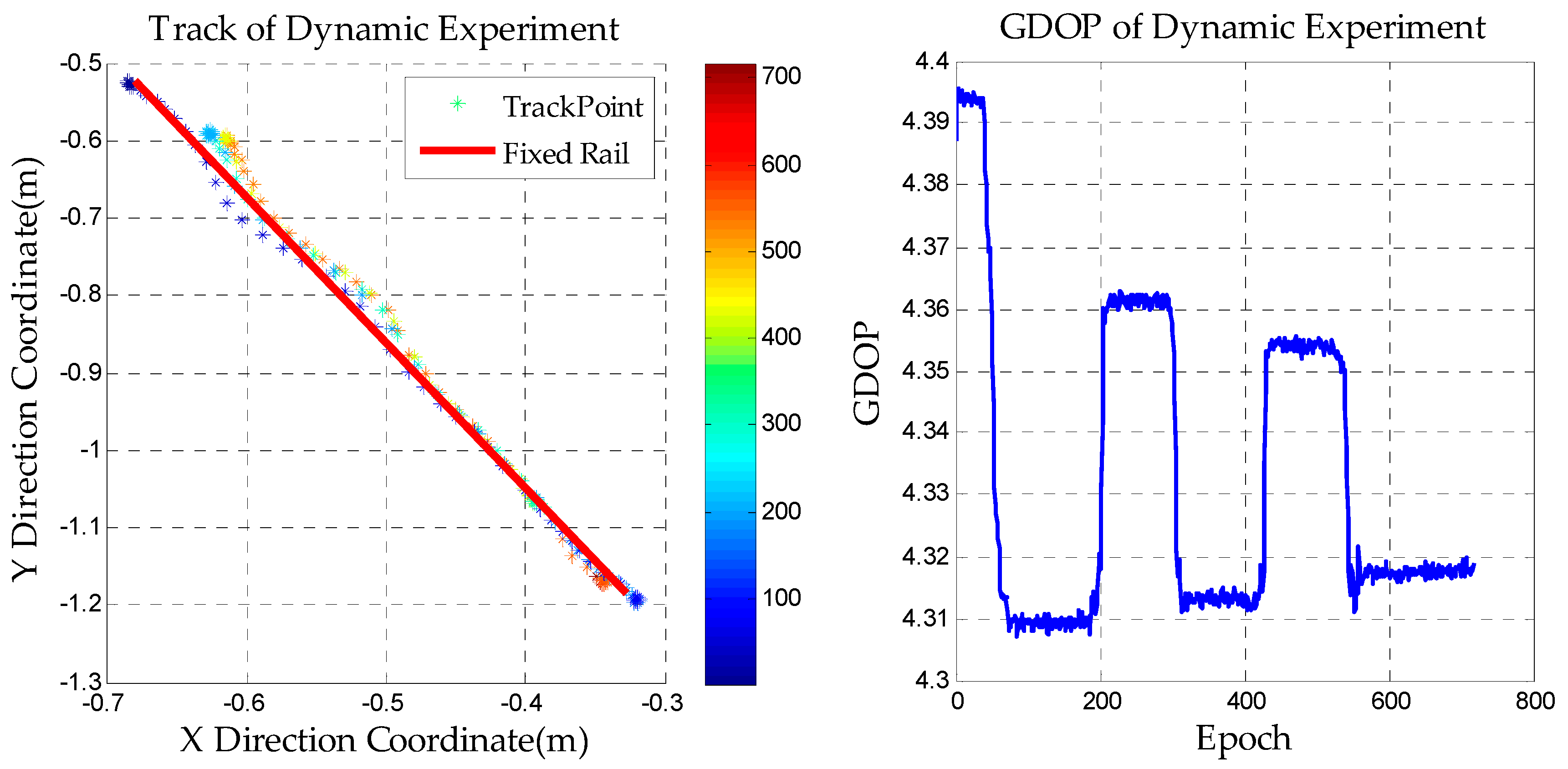
3.2.3. The Positioning Results of DAFV-LAMBDA in the Dynamic Test
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wang, J. Pseudolite Applications in Positioning and Navigation Progress and Problems. J. Glob. Position. Syst. 2002, 1, 48–56. [Google Scholar] [CrossRef]
- Dai, L.; Wang, J.; Rizos, C.; Han, S. Pseudo-Satellite Applications in Deformation Monitoring. GPS Solut. 2002, 5, 80–87. [Google Scholar] [CrossRef]
- Guo, X.; Zhou, Y.; Wang, J.; Liu, K.; Liu, C. Precise point positioning for ground-based navigation systems without accurate time synchronization. GPS Solut. 2018, 22, 34. [Google Scholar] [CrossRef]
- Rizos, C.; Roberts, G.; Barnes, J.; Gambale, N. Experimental results of Locata: A high accuracy indoor positioning system. In Proceedings of the 2010 International Conference on Indoor Positioning and Indoor Navigation, Zurich, Switzerland, 15–17 September 2010. [Google Scholar]
- Kim, C.; So, H.; Lee, T.; Kee, C. A pseudolite-based positioning system for legacy GNSS receivers. Sensors 2014, 14, 6104–6123. [Google Scholar] [CrossRef] [PubMed]
- Xu, R.; Chen, W.; Xu, Y.; Ji, S. A new indoor positioning system architecture using GPS signals. Sensors 2015, 15, 10074–10087. [Google Scholar] [CrossRef] [PubMed]
- Zhang, P.; Sun, F.; Xu, Y.; Wang, J. Indoor Pseudolite Positioning Based on Interferometric Measurement of Carrier Phase. In Proceedings of the China Satellite Navigation Conference (CSNC), Changsha, China, 18–20 May 2016; Sun, J., Liu, J., Fan, S., Wang, F., Eds.; Springer: Singapore, 2016. [Google Scholar]
- Li, X.; Zhang, P.; Guo, J.; Wang, J.; Qiu, W. A New Method for Single-Epoch Ambiguity Resolution with Indoor Pseudolite Positioning. Sensors 2017, 17, 921. [Google Scholar] [CrossRef] [PubMed]
- Fujii, K.; Sakamoto, Y.; Wang, W.; Arie, H.; Schmitz, A.; Sugano, S. Hyperbolic positioning with antenna arrays and multi-channel pseudolite for indoor localization. Sensors 2015, 15, 25157–25175. [Google Scholar] [CrossRef] [PubMed]
- Nie, Z.; Wang, Z.; Ou, J.; Ji, S. On the Effect of Linearization and Approximation of Nonlinear Baseline Length Constraint for Ambiguity Resolution. Acta Geod. Cartograph. Sin. 2015, 44, 168–173. [Google Scholar]
- Cellmer, S. Single-epoch precise positioning using Modified Ambiguity Function Approach. Tech. Sci. 2013, 16, 265–280. [Google Scholar]
- Mader, G.L. Ambiguity function techniques for GPS phase initialization and kinematic solutions. In Proceedings of the Second International Symposium on Precise Positioning with the Global Positioning System, Ottawa, ON, Canada, 3–7 September 1990. [Google Scholar]
- Counselman, C.C.; Gourevitch, S.A. Miniature interferometer terminals for earth surveying: Ambiguity and multipath with Global Positioning System. IEEE Trans. Geosci. Remote Sens. 1981, GE-19, 244–252. [Google Scholar] [CrossRef]
- Remondi, B.W. Pseudo-kinematic GPS results using the ambiguity function method. Navigation 1991, 38, 17–36. [Google Scholar] [CrossRef]
- Han, S.; Rizos, C. Improving the computational efficiency of the ambiguity function algorithm. J. Geod. 1996, 70, 330–341. [Google Scholar] [CrossRef]
- Teunissen, P.J.G. Least-Squares Estimation of the Integer GPS ambiguities. Invited Lecture, Section IV Theory and Methodology. In Proceedings of the IAG General Meeting, Beijing, China, 6–13 August 1993. [Google Scholar]
- Teunissen, P.J.G. The least-squares ambiguity decorrelation adjustment: A method for fast GPS integer ambiguity estimation. J. Géod. 1995, 70, 65–82. [Google Scholar] [CrossRef]
- Verhagen, S.; Li, B.; Teunissen, P.J.G. Ps-LAMBDA: Ambiguity success rate evaluation software for interferometric applications. Comput. Geosci. 2013, 54, 361–376. [Google Scholar] [CrossRef]
- Wan, X.G.; Zhan, X.Q.; Du, G. Carrier PhaseMethod for Indoor Pseudolite Positioning System. Appl. Mech. Mater. 2011, 130–134, 2064–2067. [Google Scholar] [CrossRef]
- Liu, Y.; Lian, B. Indoor pseudolite relative localization algorithm with kalman filter. Acta Phys. Sin. 2014, 63, 1–7. [Google Scholar]
- Cellmer, S.; Wielgosz, P.; Rzepecka, Z. Modified ambiguity function approach for GPS carrier phase positioning. J. Géod. 2010, 84, 267–275. [Google Scholar] [CrossRef]
- Alfred, L. GPS Satellite Surveying, 3rd ed.; Wiley: New York, NY, USA, 2004. [Google Scholar]
- Teunissen, P.J.G.; Kleusberg, A. GPS for Geodesy; Springer: Berlin, Germany, 1998. [Google Scholar]
- Li, X.; Guo, J.; Zhou, L. Performance Analysis of BDS/GPS Kinematic Vehicle Positioning in Various Observation Conditions. Sens. Rev. 2016, 36, 249–256. [Google Scholar] [CrossRef]
- Takasu, T. RTKLIB Version 2.4.2 Manual. p. 183. Available online: http://www.rtklib.com/prog/manual_2.4.2.pdf (accessed on 15 May 2018).
- Eling, C.; Zeimetz, P.; Kuhlmann, H. Single-Epoch Ambiguity Resolution for kinematic GNSS Positioning. In Proceedings of the 3rd International Conference on Machine Control & Guidance, Stuttgart, Germany, 27–29 March 2012. [Google Scholar]
- Yang, Y.; Mao, X.; Tian, W. Rotation Matrix Method Based on Ambiguity Function for GNSS Attitude Determination. Sensors 2016, 16, 841. [Google Scholar] [CrossRef] [PubMed]
- Nowel, K.; Cellmer, S.; Kwaśniak, D. Mixed integer–real least squares estimation for precise GNSS positioning using a modified ambiguity function approach. GPS Solut. 2018, 22, 31. [Google Scholar] [CrossRef]
- Takasu, T.; Yasuda, A. Development of the low-cost RTK-GPS receiver with an open source program package RTKLIB. In Proceedings of the International Symposium on Gps/GNSS, Jeju, Korea, 4–6 November 2009. [Google Scholar]
- Koch, K.R.; Yang, Y. Robust Kalman filter for rank deficient observation models. J. Geod. 1998, 72, 436–441. [Google Scholar] [CrossRef]
- Hedgecock, W.; Maroti, M.; Ledeczi, A.; Volgyesi, P.; Banalagay, R. Accurate real-time relative localization using single-frequency GPS. In Proceedings of the 12th ACM Conference on Embedded Network Sensor Systems, Memphis, TN, USA, 3–6 November 2014. [Google Scholar]
- Eling, C.; Zeimetz, P.; Kuhlmann, H. Development of an instantaneous GNSS/MEMS attitude determination system. GPS Solut. 2013, 17, 129–138. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Search Scope/m | Search Step/cm | ||||
|---|---|---|---|---|---|
| 0.1 | 0.5 | 1 | 2 | 4 | |
| 0.5 | 5.032 | 0.203 | 0.051 | 0.012 | 0.004 |
| 1 | 20.495 | 0.823 | 0.207 | 0.051 | 0.012 |
| 2 | 83.901 | 3.299 | 0.834 | 0.205 | 0.053 |
| Search Step of 1 cm | ||
| X Coordinate | Y Coordinate | AFV |
| 0.6 | 0 | 0.9997 |
| 0.6 | −0.01 | 0.9926 |
| 0.6 | 0.01 | 0.9906 |
| 0.61 | −0.01 | 0.9771 |
| 0.59 | 0.01 | 0.9767 |
| 0.59 | 0 | 0.9739 |
| 0.61 | 0 | 0.9724 |
| 0.6 | −0.02 | 0.9693 |
| 0.61 | −0.02 | 0.9657 |
| 0.6 | 0.02 | 0.9657 |
| 0.59 | 0.02 | 0.9636 |
| Search Step of 2 cm | ||
| X Coordinate | Y Coordinate | AFV |
| 0.6 | 0 | 0.9997 |
| 0.6 | −0.02 | 0.9693 |
| 0.6 | 0.02 | 0.9657 |
| 0.62 | −0.02 | 0.9104 |
| 0.58 | 0.02 | 0.9097 |
| 0.58 | 0 | 0.8970 |
| Search Step of 4 cm | ||
| X Coordinate | Y Coordinate | AFV |
| 0.6 | 0 | 0.9997 |
| 0.6 | −0.04 | 0.8767 |
| Search Step of 1 cm | ||
| X Coordinate | Y Coordinate | AFV |
| 0.63 | −0.42 | 0.9641 |
| 0.23 | −0.87 | 0.9614 |
| 0.23 | −0.86 | 0.9607 |
| 0.63 | −0.43 | 0.9602 |
| 0.62 | −0.42 | 0.9555 |
| 0.22 | −0.86 | 0.9508 |
| Search Step of 2 cm | ||
| X Coordinate | Y Coordinate | AFV |
| 0.62 | −0.42 | 0.9555 |
| 0.22 | −0.86 | 0.9508 |
| Search Step of 4 cm | ||
| X Coordinate | Y Coordinate | AFV |
| 0.64 | −0.42 | 0.9219 |
| X Coordinate | Y Coordinate | AFV | remark | X Coordinate | Y Coordinate | AFV |
|---|---|---|---|---|---|---|
| −0.68 | −0.52 | 0.9364 | Real Peak | −0.52 | −0.56 | 0.8957 |
| −0.50 | −0.16 | 0.9147 | Wrong Peak | −0.86 | −0.88 | 0.8916 |
| −0.50 | −0.14 | 0.9138 | Wrong Peak | −1.04 | −0.16 | 0.8831 |
| −1.04 | −0.86 | 0.9069 | Wrong Peak | −0.34 | −0.18 | 0.8599 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, Y.; Zhang, P.; Guo, J.; Li, X.; Wang, J.; Yang, F.; Wang, X. A New Method of High-Precision Positioning for an Indoor Pseudolite without Using the Known Point Initialization. Sensors 2018, 18, 1977. https://doi.org/10.3390/s18061977
Zhao Y, Zhang P, Guo J, Li X, Wang J, Yang F, Wang X. A New Method of High-Precision Positioning for an Indoor Pseudolite without Using the Known Point Initialization. Sensors. 2018; 18(6):1977. https://doi.org/10.3390/s18061977
Chicago/Turabian StyleZhao, Yinzhi, Peng Zhang, Jiming Guo, Xin Li, Jinling Wang, Fei Yang, and Xinzhe Wang. 2018. "A New Method of High-Precision Positioning for an Indoor Pseudolite without Using the Known Point Initialization" Sensors 18, no. 6: 1977. https://doi.org/10.3390/s18061977
APA StyleZhao, Y., Zhang, P., Guo, J., Li, X., Wang, J., Yang, F., & Wang, X. (2018). A New Method of High-Precision Positioning for an Indoor Pseudolite without Using the Known Point Initialization. Sensors, 18(6), 1977. https://doi.org/10.3390/s18061977