Fire Source Range Localization Based on the Dynamic Optimization Method for Large-Space Buildings


Abstract
1. Introduction
2. Problem Formulation
- (1)
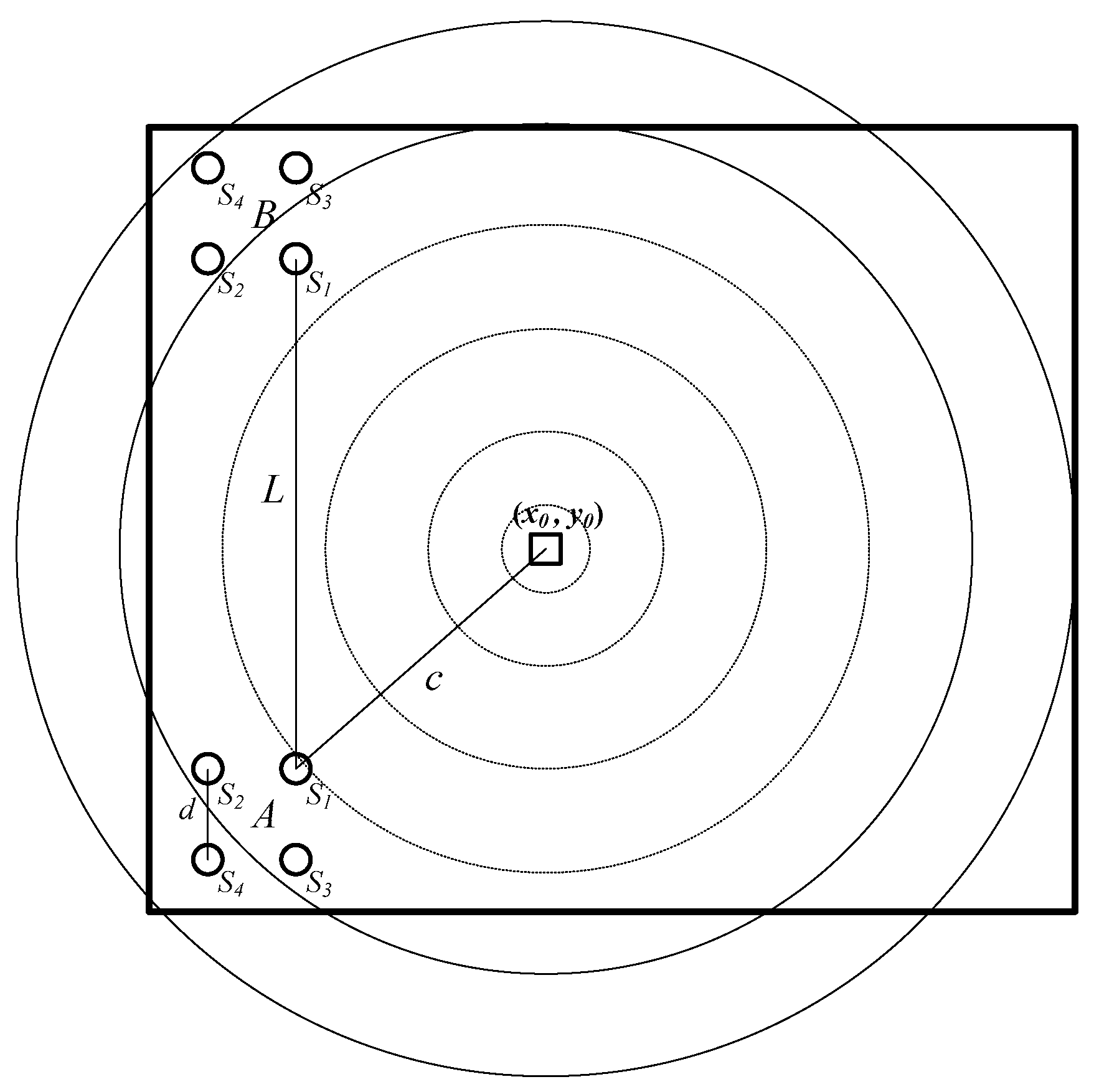
- Delay Estimation. As shown in Figure 1, there are different distances from the fire source to different temperature sensors. According to the temperature field expectation in Equation (1), the delay time of the same temperature time series spread to different sensors can be estimated by the correlation function method [12], or the gray relation analysis method [29].
- (2)
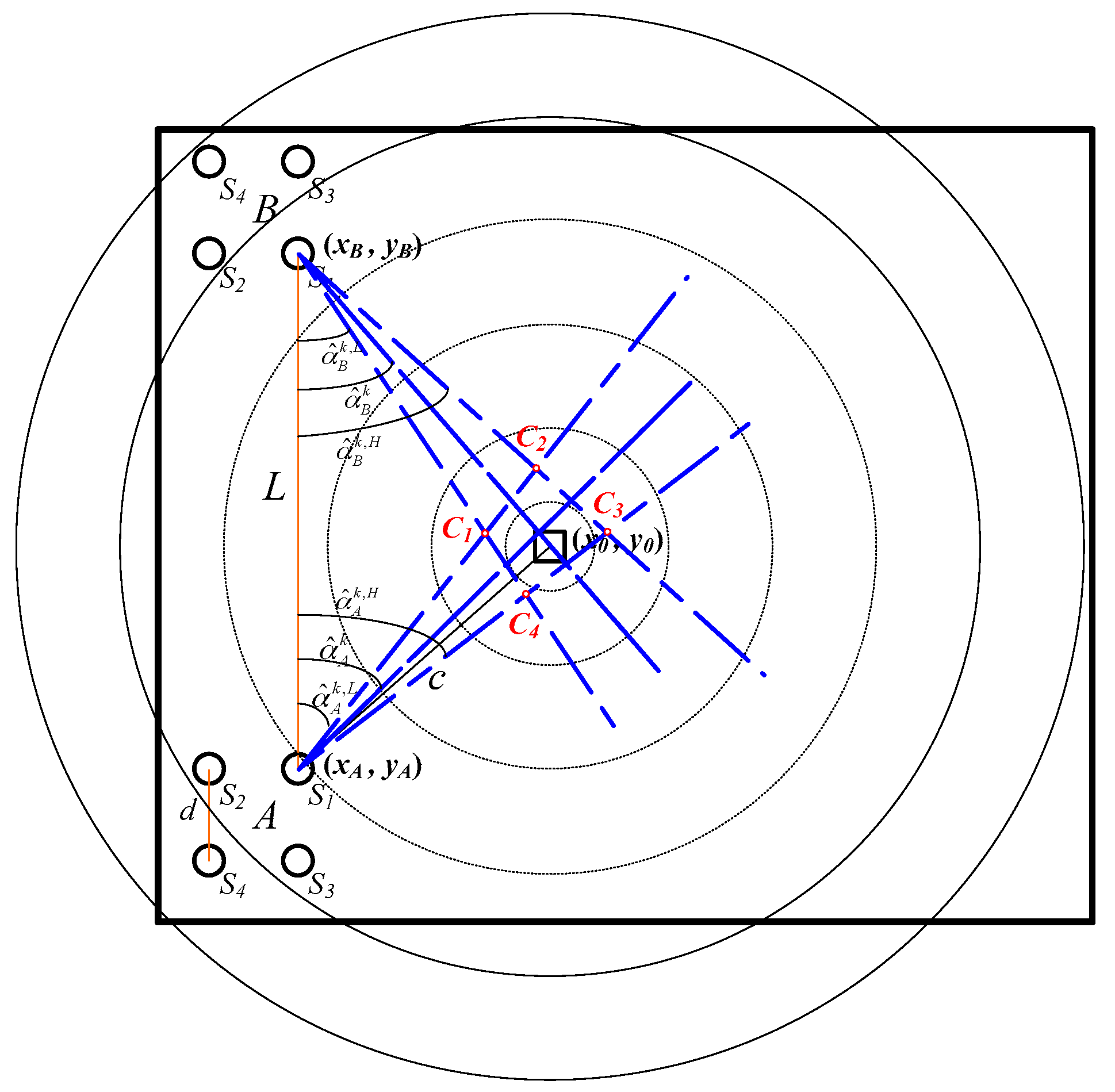
- Angle Estimation. Denote as the delay time from to , as the sample rate of the temperature sensors, is an intersection angle crossed by the horizontal line and the line from the sensor array to the fire source, as shown in Figure 1. Based on the planar waves assumption of the far-field algorithm, for the sensor set , one can obtain:then:
- (3)
- Fire Source Point Estimation. For every combination , the fire source point can be estimated as follows [12]:where is the coordinate of in the sensor array A.
3. Main Results
3.1. Dynamic Optimization Localization Method in the RPR Frame
3.2. Dynamic Optimization Localization Method in the RRR Frame
4. Simulation
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Cram, D.; Hatch, C.; Tyler, S.; Ochoa, C. Use of Distributed Temperature Sensing Technology to Characterize Fire Behavior. Sensors 2016, 16, 1712. [Google Scholar] [CrossRef] [PubMed]
- Lu, Y.; Wang, H.; Wang, K. Fire Location for High and Large-Span Space Buildings based on Binocular Stereo Vision. Int. J. Smart Home 2016, 10, 271–282. [Google Scholar]
- Sun, Y.; Huang, H.; Li, F.; Yu, D.; Hao, C. Research on Zoning Control of Fire in Large Space Building. J. Wuhan Univ. Technol. 2017, 2, 144–147. [Google Scholar]
- Mao, Y.; Wang, H.; Lu, Y.; Qin, L. Precise Localisation Method for Fire Sources in Large-space Buildings. Comput. Appl. Softw. 2016, 2, 169–172. [Google Scholar]
- Ying, L.; Wang, H.; Qin, L. Accurate fire location method in high and large-span space buildings. J. Jilin Univ. 2016, 6, 2067–2073. [Google Scholar]
- Zhang, Q.; Yang, X. Numerical Simulation and Detection Response Analysis of Fire in a Large Space Building. In Proceedings of the International Conference on Intelligent Computation Technology and Automation, Changsha, China, 25–26 October 2014; pp. 388–391. [Google Scholar]
- Song, T.; Tang, B.; Zhao, M.; Deng, L. An accurate 3-D fire location method based on sub-pixel edge detection and non-parametric stereo matching. Measurement 2014, 4, 160–171. [Google Scholar] [CrossRef]
- Hackner, A.; Oberpriller, H.; Ohnesorge, A.; Hechtenberg, V.; Müller, G. Heterogeneous sensor arrays: Merging cameras and gas sensors into innovative fire detection systems. Sens. Actuators B Chem. 2016, 231, 497–505. [Google Scholar] [CrossRef]
- Song, H.; Lee, Y. A Development of Fire Detective Control System using the Fusion of a CCD Image and an Infrared Image. J. Korean Inst. Illum. Elec. Install. Eng. 2017, 5, 60–66. [Google Scholar] [CrossRef]
- Jiang, M.; Yao, B.; Cheng, Y. Response characteristics of distributed optical fiber temperature testing system in highway tunnel fire detection. Fire Saf. Sci. 2013, 4, 194–200. [Google Scholar]
- Feng, R. Optical Fiber Grating Temperature Sensing Tunnel Fire Alarm System. Trans. Sci. Technol. 2009, 1, 89–91. [Google Scholar]
- Sun, M.; Tang, Y.; Yang, S.; Dong, F. Fiber optic distributed temperature sensing for fire source localization. Meas. Sci. Technol. 2017, 8, 085102. [Google Scholar] [CrossRef]
- Sun, M.; Tang, Y.; Yang, S.; Li, J.; Sigrist, M.W.; Dong, F. Fire Source Localization Based on Distributed Temperature Sensing by a Dual-Line Optical Fiber System. Sensors 2016, 16, 829. [Google Scholar] [CrossRef] [PubMed]
- Chen, X.; Li, K.; Li, J.; Hong, Y. Security technology research on high-temperature fire area blasting in surface mine. Opencast Min. Technol. 2010, 4, 73–75. [Google Scholar]
- Martínez-de Dios, J.R.; Merino, L.; Caballero, F.; Ollero, A. Automatic Forest-Fire Measuring Using Ground Stations and Unmanned Aerial Systems. Sensors 2011, 11, 6328–6353. [Google Scholar] [CrossRef] [PubMed]
- Shan, Y.; Ma, Y.; Fu, H.; Li, W.; Wang, C. Application of distributed optical fiber temperature measurement system in coal mine fire monitoring system. Chin. J. Sens. Actuators 2014, 5, 22–25. [Google Scholar]
- Noordin, N.; Ney, H. Localization in wireless sensor network for forest fire detection. In Proceedings of the 3rd IEEE International Symposium on Telecommunication Technologies, Kuala Lumpur, Malaysia, 28–30 November 2016; pp. 87–90. [Google Scholar]
- Berentsen, M.; Kaiser, T. Fire Location Estimation using Temperature Sensor Arrays. In Proceedings of the 12th International Conference on Automatic Fire Detection, Gaithersburg, MD, USA, 25 March 2001; pp. 432–443. [Google Scholar]
- Wang, S.; Berentsen, M.; Kaiser, T. Signal processing algorithms for fire localization using temperature sensor arrays. Fire Saf. J. 2005, 8, 689–697. [Google Scholar] [CrossRef]
- Stern-Gottfried, J.; Rein, G.; Bisby, L.; Torero, J.L. Experimental review of the homogeneous temperature assumption in post-flashover compartment fires. Fire Saf. J. 2010, 4, 249–261. [Google Scholar] [CrossRef]
- Duan, S.; Cheng, K.; Ge, Q.; Wen, C. Wireless Intelligent Fire Fighting Systems Software Platform R&D. In Proceedings of the 2011 International Conference on Internet of Things and International Conference on Cyber, Physical and Social Computing, Dalian, China, 19–22 October 2011; pp. 94–99. [Google Scholar]
- Duan, S.; Ge, Q.; Wen, C. New method for fire source clustering localization based on sensor arrays. J. Nanjing Univ. Sci. Technol. 2011, 35, 59–65. [Google Scholar]
- Zhuang, Z.; Zhang, X.; Kalin, L. Method Research on Early Fire Source Localization Based on Planar Circular Sensor Arrays. Chin. J. Sens. Actuators 2009, 8, 1208–1212. [Google Scholar]
- Ge, Q.; Wen, C.; Duan, S. Fire Localization Based on Range-Range-Range Model for Limited Interior Space. IEEE Trans. Instrum. Meas. 2014, 9, 2223–2237. [Google Scholar] [CrossRef]
- Liu, H.; Darabi, H.; Banerjee, P.; Liu, J. Survey of Wireless Indoor Positioning Techniques and Systems. IEEE Trans. Syst. Man Cybern. Part C 2007, 37, 1067–1080. [Google Scholar] [CrossRef]
- He, S.; Hu, T.; Chan, S.H.G. Contour-based Trilateration for Indoor Fingerprinting Localization. In Proceedings of the 2015 ACM Conference on Embedded Networked Sensor Systems, Seoul, Korea, 1–4 November 2015; pp. 225–238. [Google Scholar]
- Sun, G.; Chen, J.; Guo, W.; Liu, K.R. Signal processing techniques in network-aided positioning: A survey of state-of-the-art positioning designs. IEEE Signal Process. Mag. 2005, 22, 12–23. [Google Scholar]
- Fonollosa, J.; Solórzano, A.; Marco, S. Chemical Sensor Systems and Associated Algorithms for Fire Detection: A Review. Sensors 2018, 18, 553. [Google Scholar] [CrossRef] [PubMed]
- Sawada, A.; Higashino, T.; Oyabu, T.; Takei, Y.; Nanto, H.; Toko, K. Gas sensor characteristics for smoldering fire caused by a cigarette smoke. Sens. Actuators B Chem. 2008, 130, 88–93. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Simulation Background | Simulation Setting |
|---|---|
| The length of the buildings | 11 m (meters) |
| The width of the buildings | 11 m |
| the real point of fire source | (5 m, 5 m) |
| The distance between the two temperature sensor arrays | |
| The distance between the two sensors in a array | |
| The coordinate of the reference node of sensor array A | (0.5 m, 1 m) |
| The coordinate of the reference node of sensor array B | (1 m, 10 m) |
| The sampling frequency | 500 Hz |
| The Algorithms | Abbreviations |
|---|---|
| The angle bisector method with the circum-circle | Algorithm A |
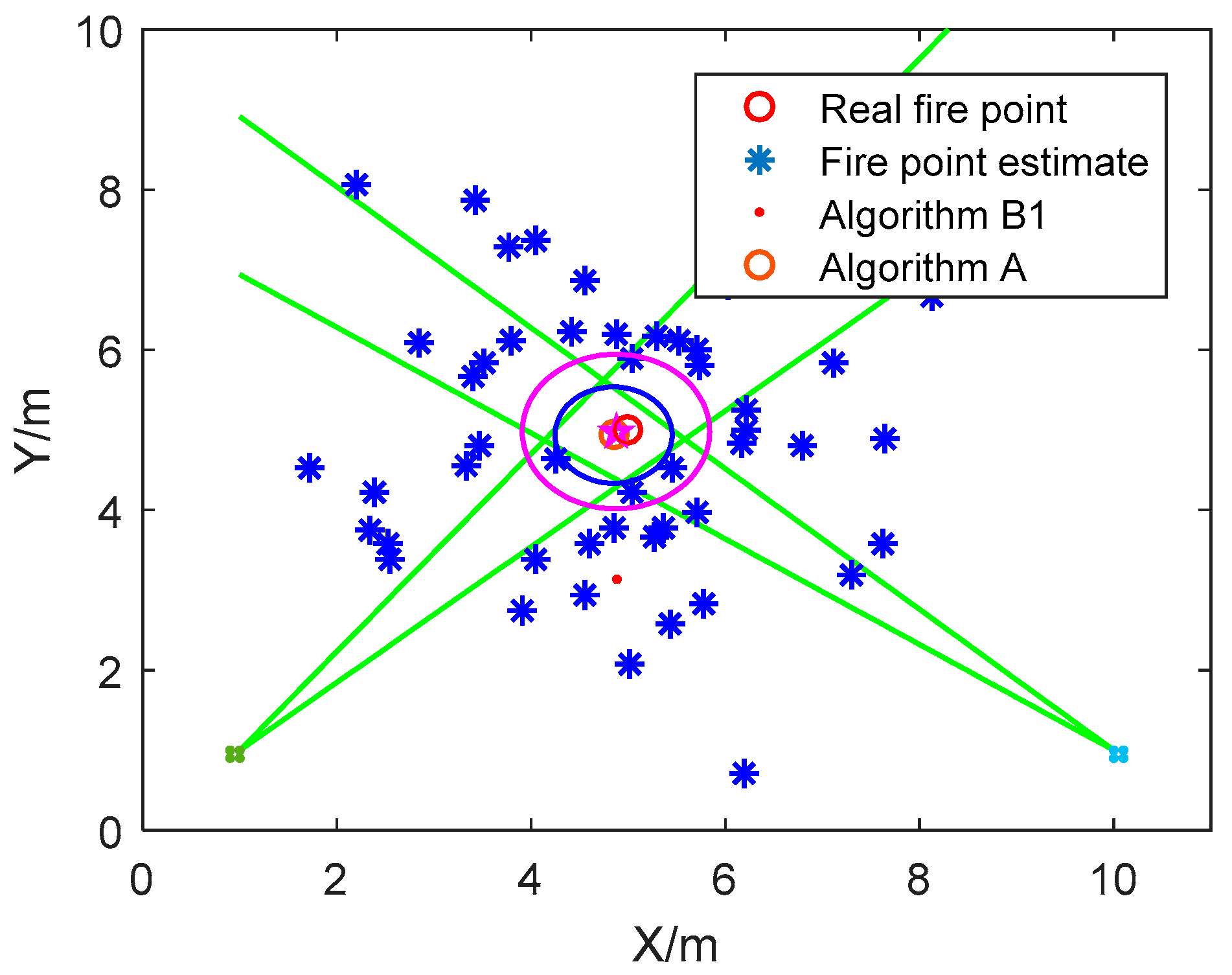
| The dynamic optimization localization method in the RPR frame | Algorithm B1 |
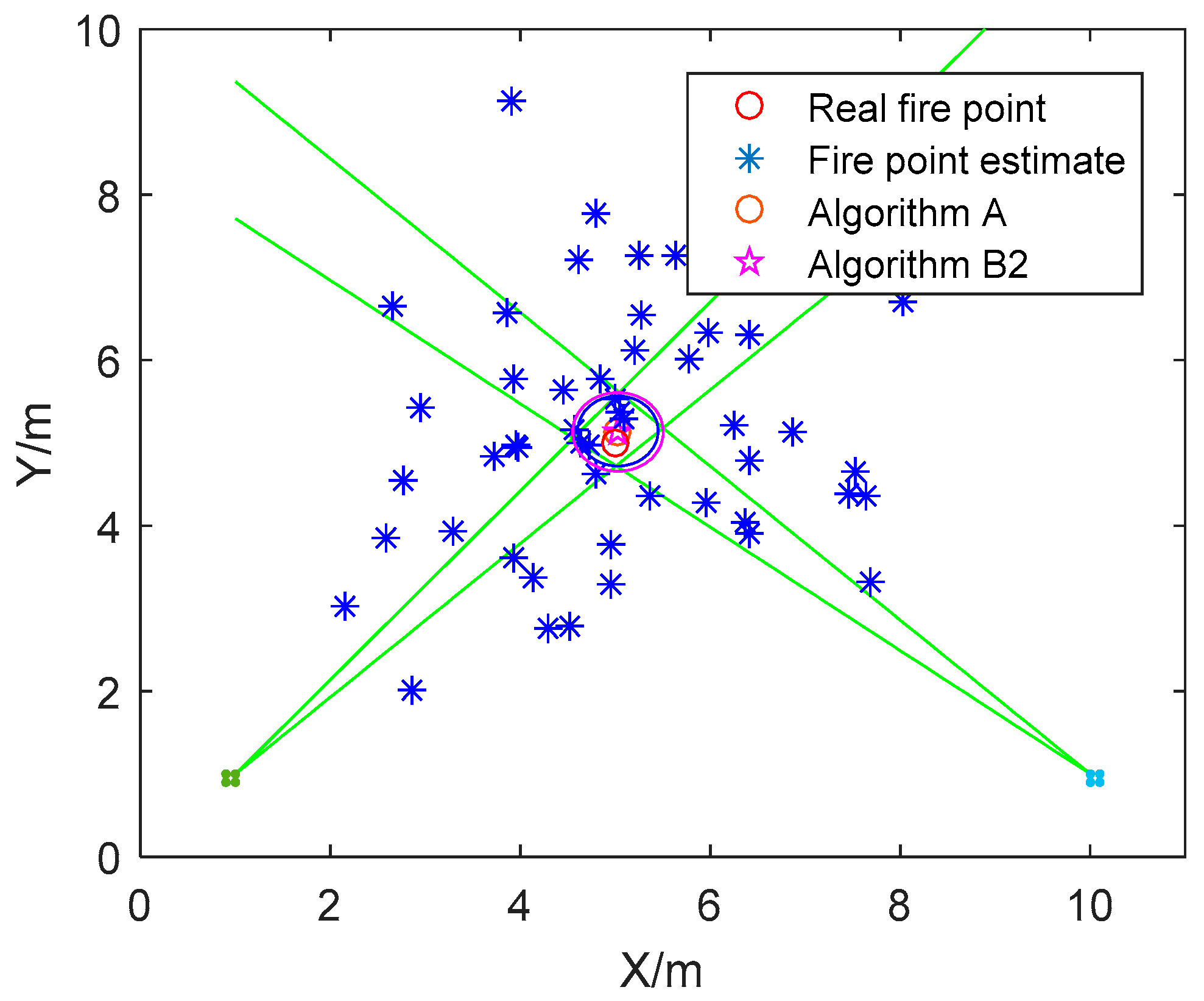
| The dynamic optimization localization method in the RRR frame | Algorithm B2 |
| The localization method based on VB-ASCKF in the RRR frame | Algorithm C |
| The localization method in the RRR frame with clustering technology | Algorithm D |
| The Real Fire Point | Algorithm A | Algorithm B1 |
|---|---|---|
| (5, 5) | (4.849, 4.935) | (4.873, 4.98) |
| The Real Fire Point | Algorithm A | Algorithm B2 |
|---|---|---|
| (5, 5) | (5.027, 5.144) | (5.027, 5.133) |
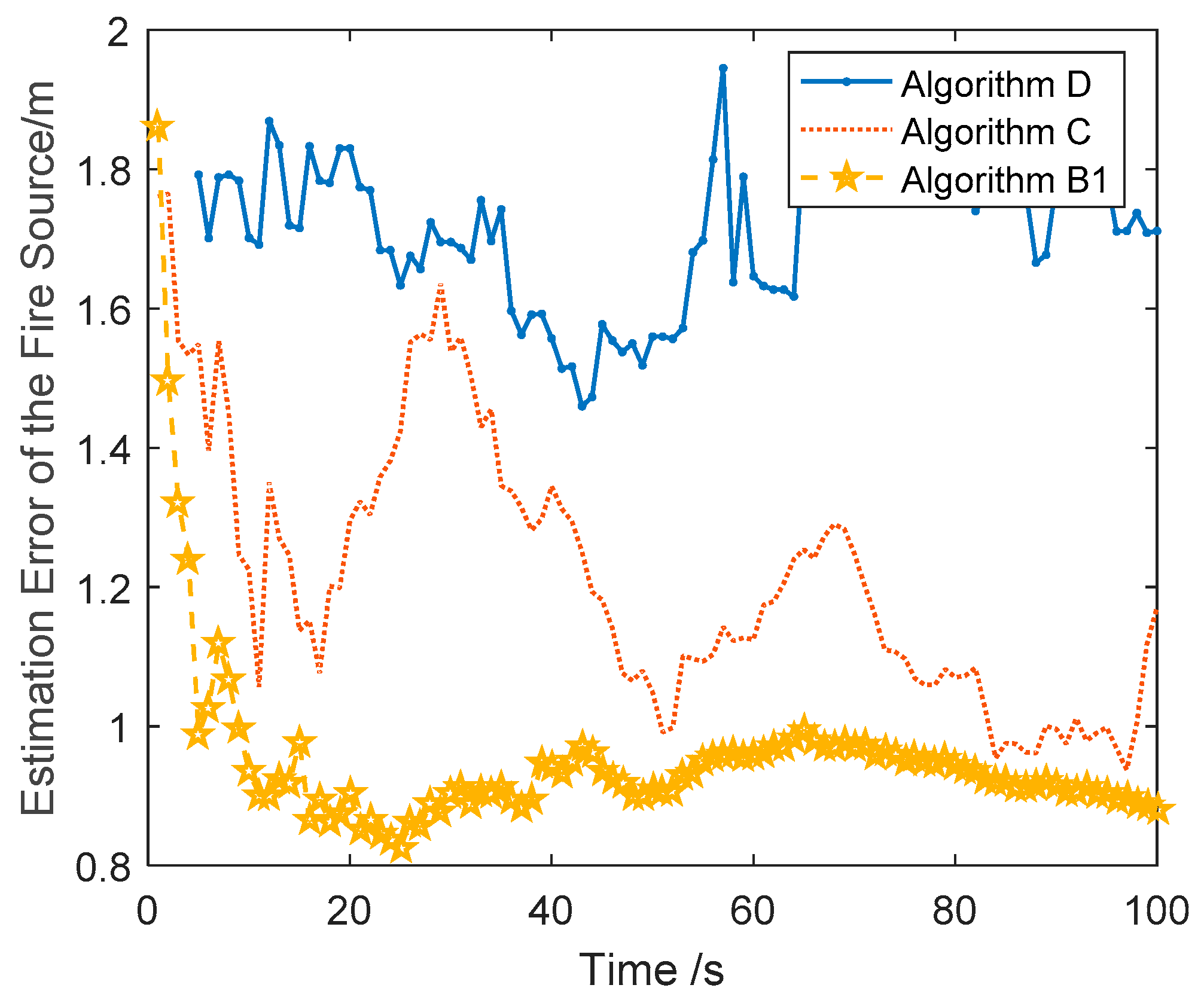
| The Algorithms | Algorithm B1 | Algorithm C | Algorithm D |
|---|---|---|---|
| Mean estimation error | 0.9 | 1.2 | 1.7 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, G.; Feng, X.; Zhang, Z. Fire Source Range Localization Based on the Dynamic Optimization Method for Large-Space Buildings. Sensors 2018, 18, 1954. https://doi.org/10.3390/s18061954
Wang G, Feng X, Zhang Z. Fire Source Range Localization Based on the Dynamic Optimization Method for Large-Space Buildings. Sensors. 2018; 18(6):1954. https://doi.org/10.3390/s18061954
Chicago/Turabian StyleWang, Guoyong, Xiaoliang Feng, and Zhenzhong Zhang. 2018. "Fire Source Range Localization Based on the Dynamic Optimization Method for Large-Space Buildings" Sensors 18, no. 6: 1954. https://doi.org/10.3390/s18061954
APA StyleWang, G., Feng, X., & Zhang, Z. (2018). Fire Source Range Localization Based on the Dynamic Optimization Method for Large-Space Buildings. Sensors, 18(6), 1954. https://doi.org/10.3390/s18061954