Error Analysis of Magnetohydrodynamic Angular Rate Sensor Combing with Coriolis Effect at Low Frequency

Abstract
:1. Introduction
2. Modeling and Simulation Method
2.1. Modeling of the Modified MHD ARS Combing with Coriolis Effect (Abbreviated as C-MHD ARS)
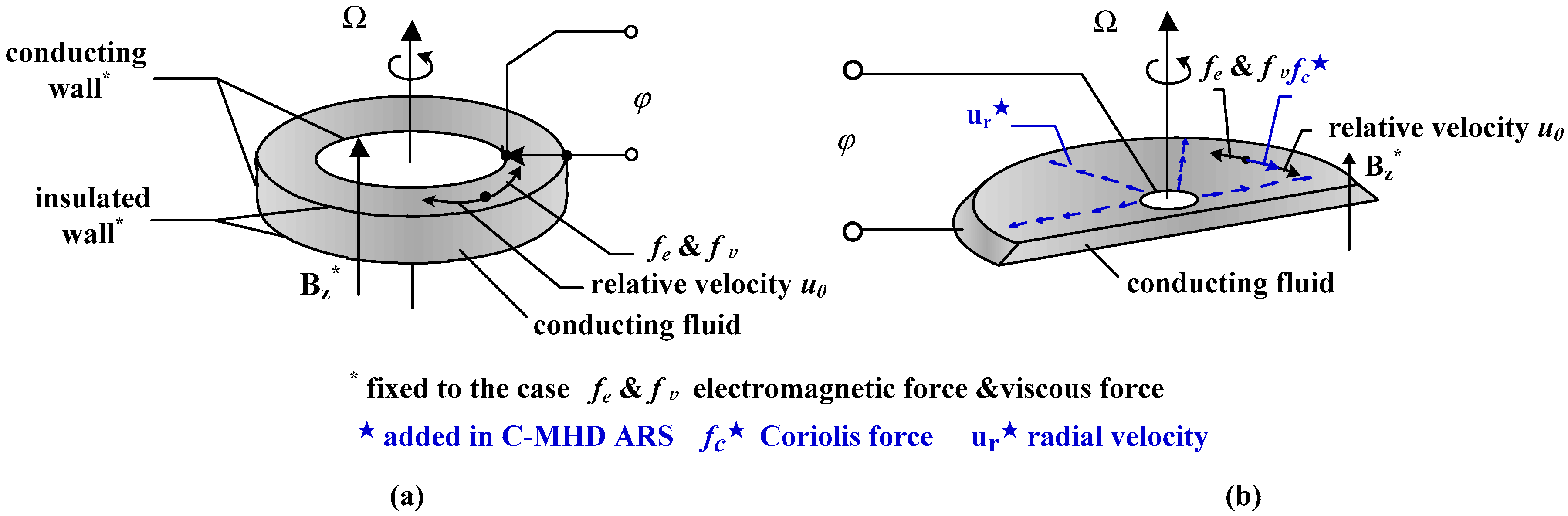
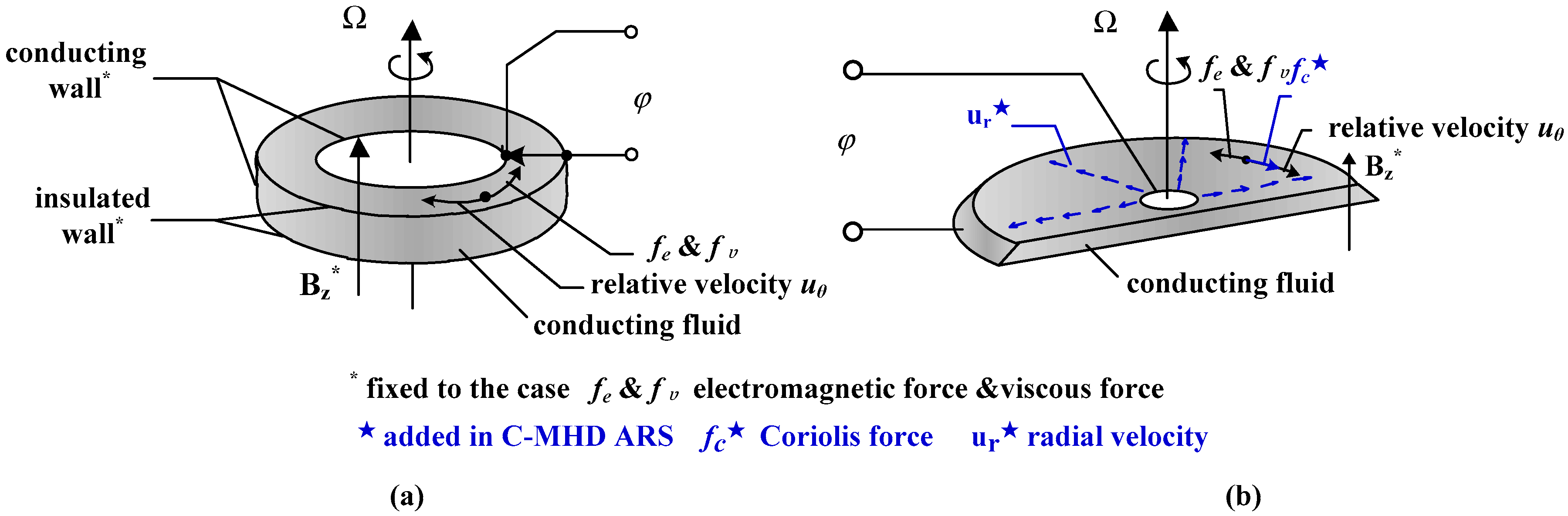
2.1.1. The Working Principle of C-MHD ARS
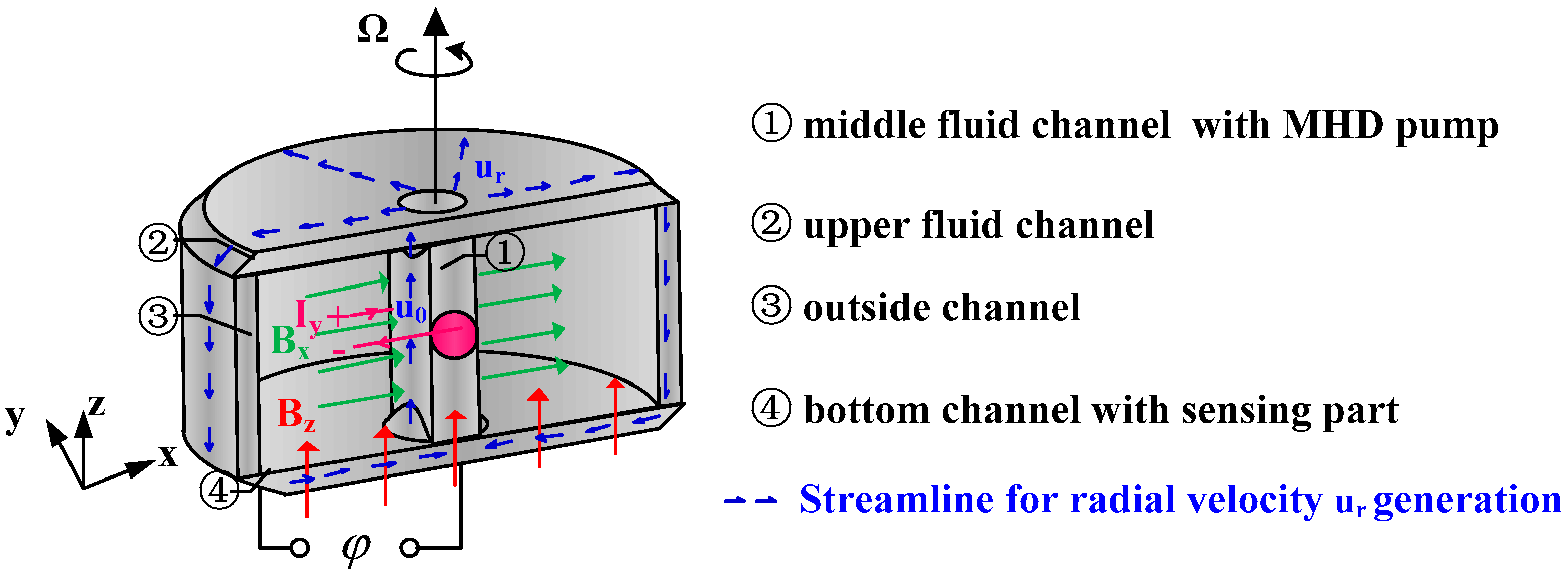
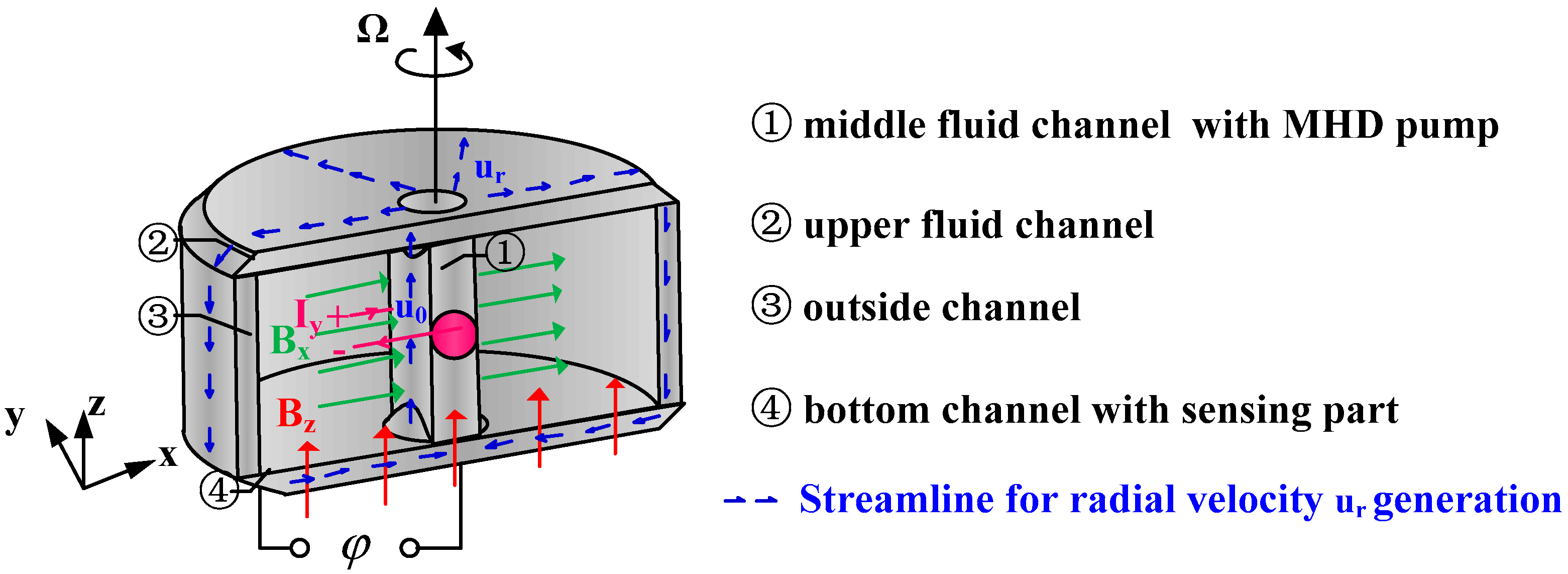
2.1.2. The Design of Fluid Channel
2.1.3. Basic Governing Equations of C-MHD ARS
2.2. Model Solution Method
2.2.1. Simulation Program and Solution Methods
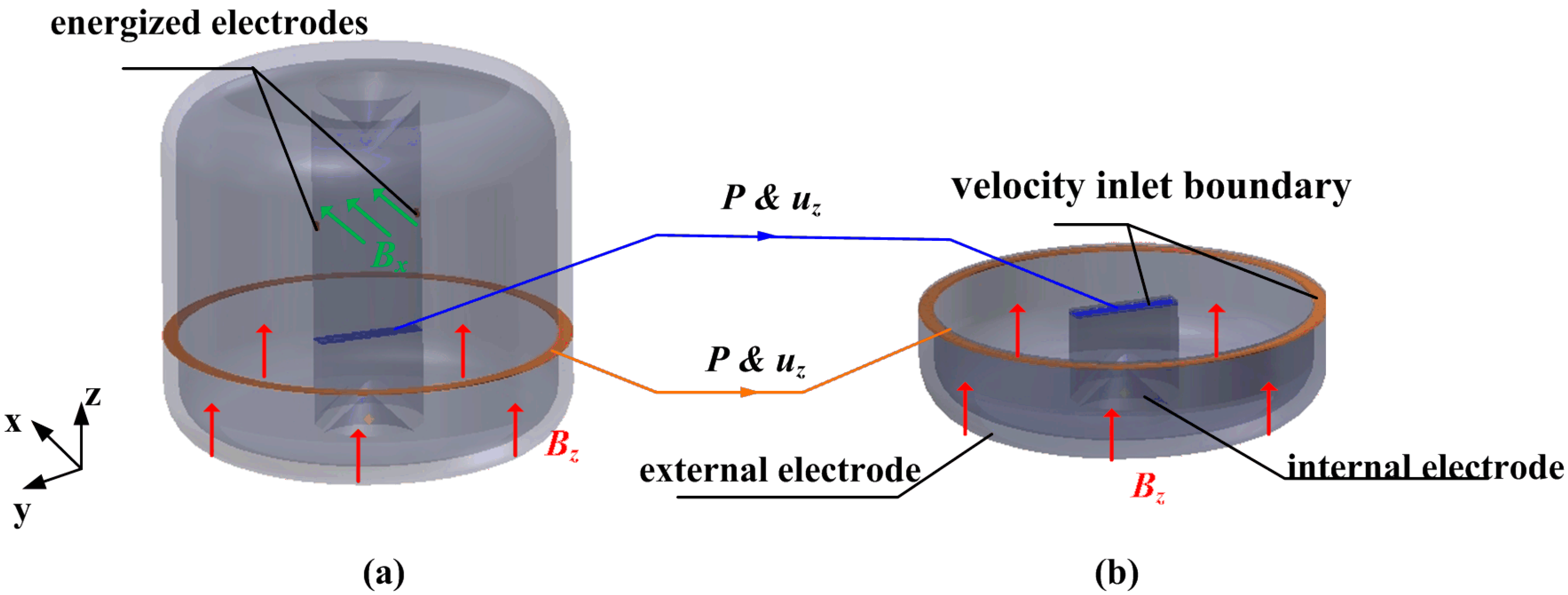
2.2.2. The Solving Method of Interaction between Flow Field and Electromagnetic Field and Boundary Conditions
3. Simulation Results and Analysis
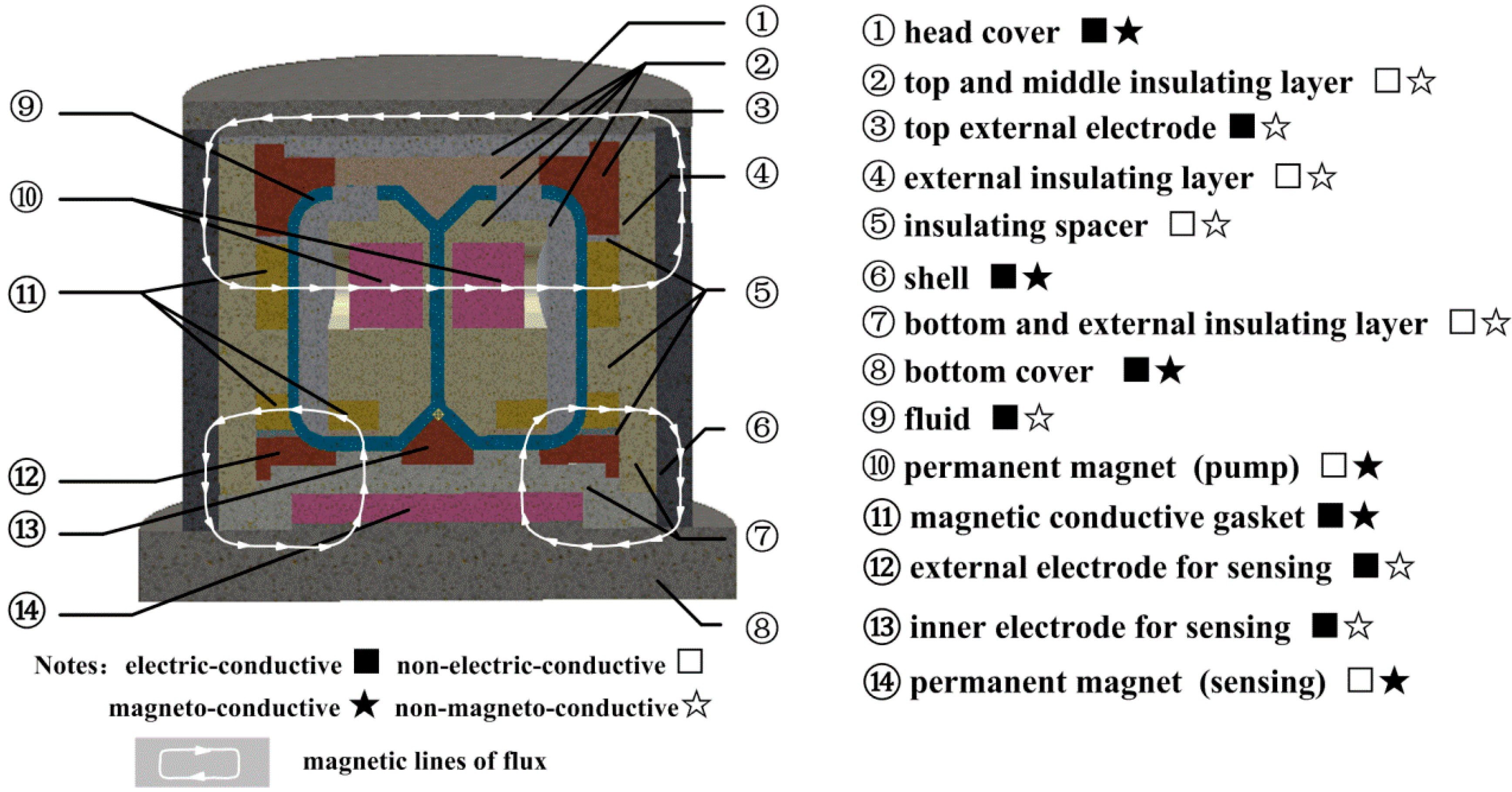
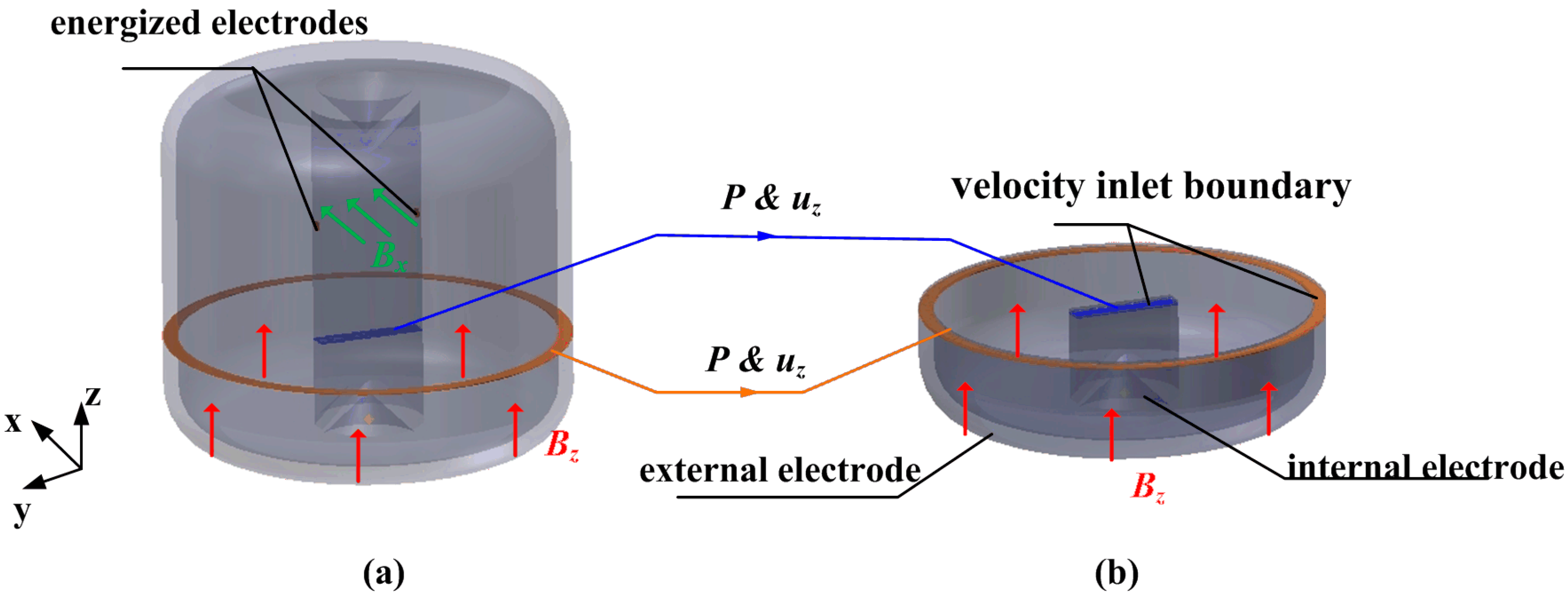
3.1. Description of the Designed C-MHD ARS
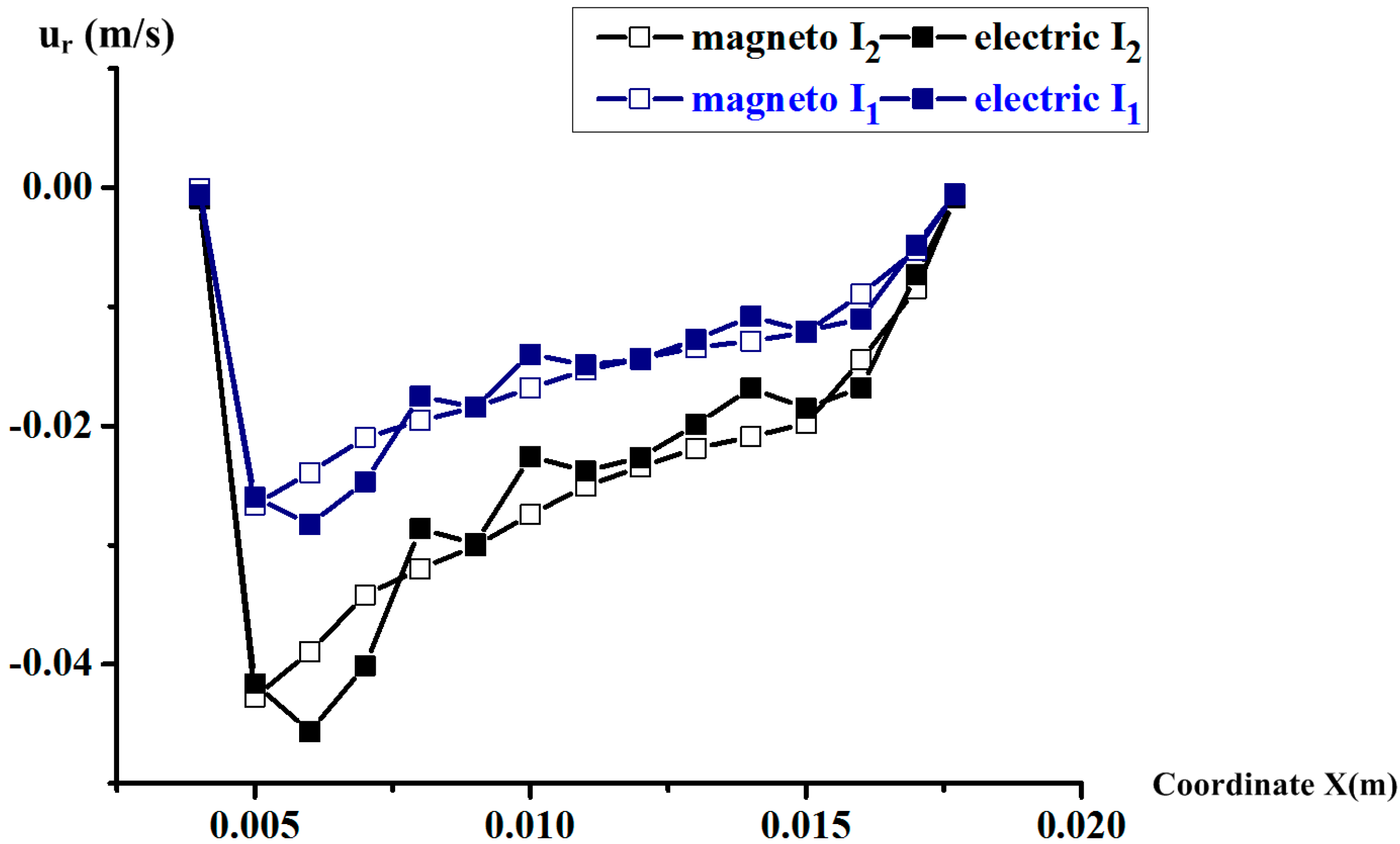
3.2. Simulation Results and Analysis on the MHD Pump
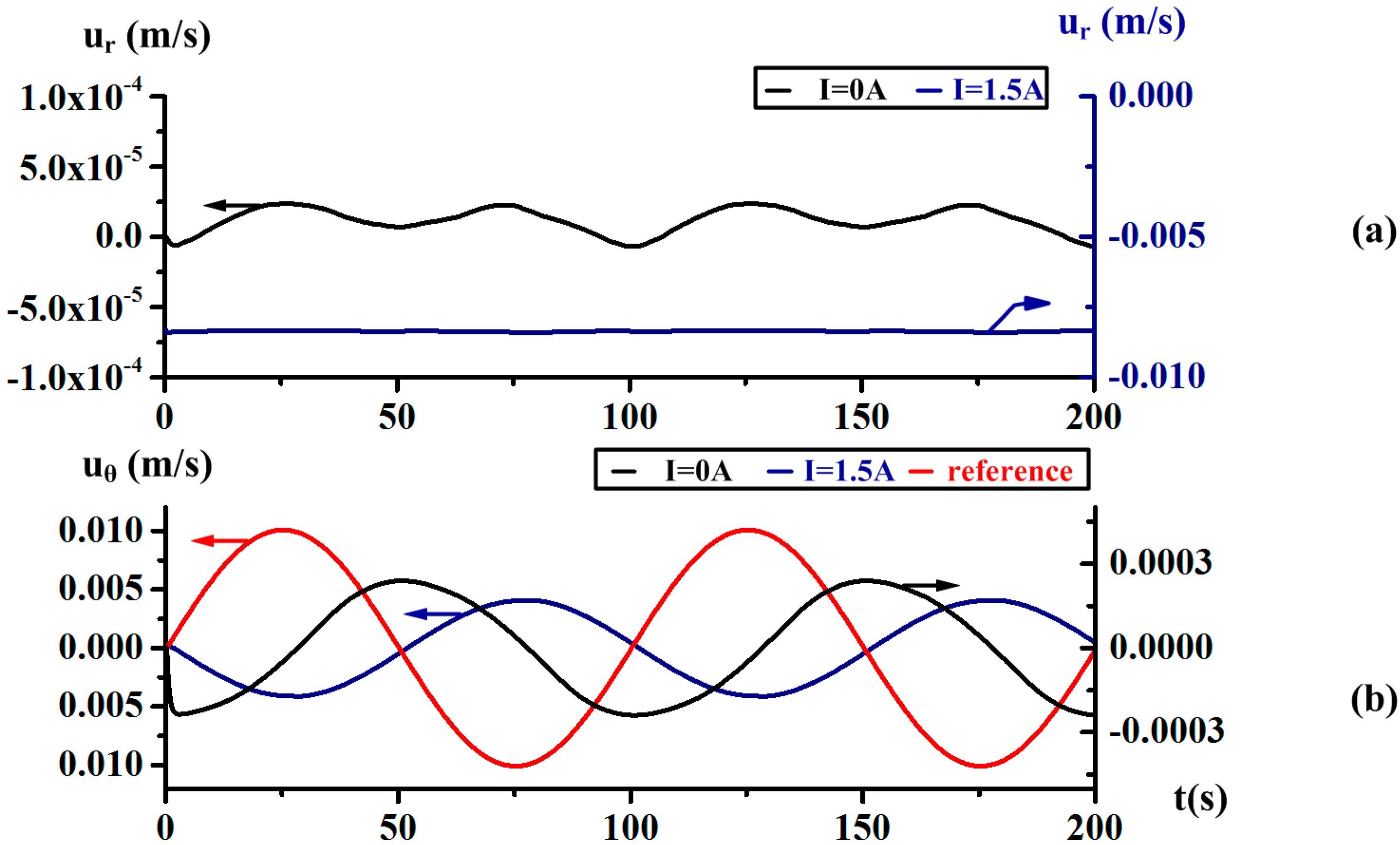
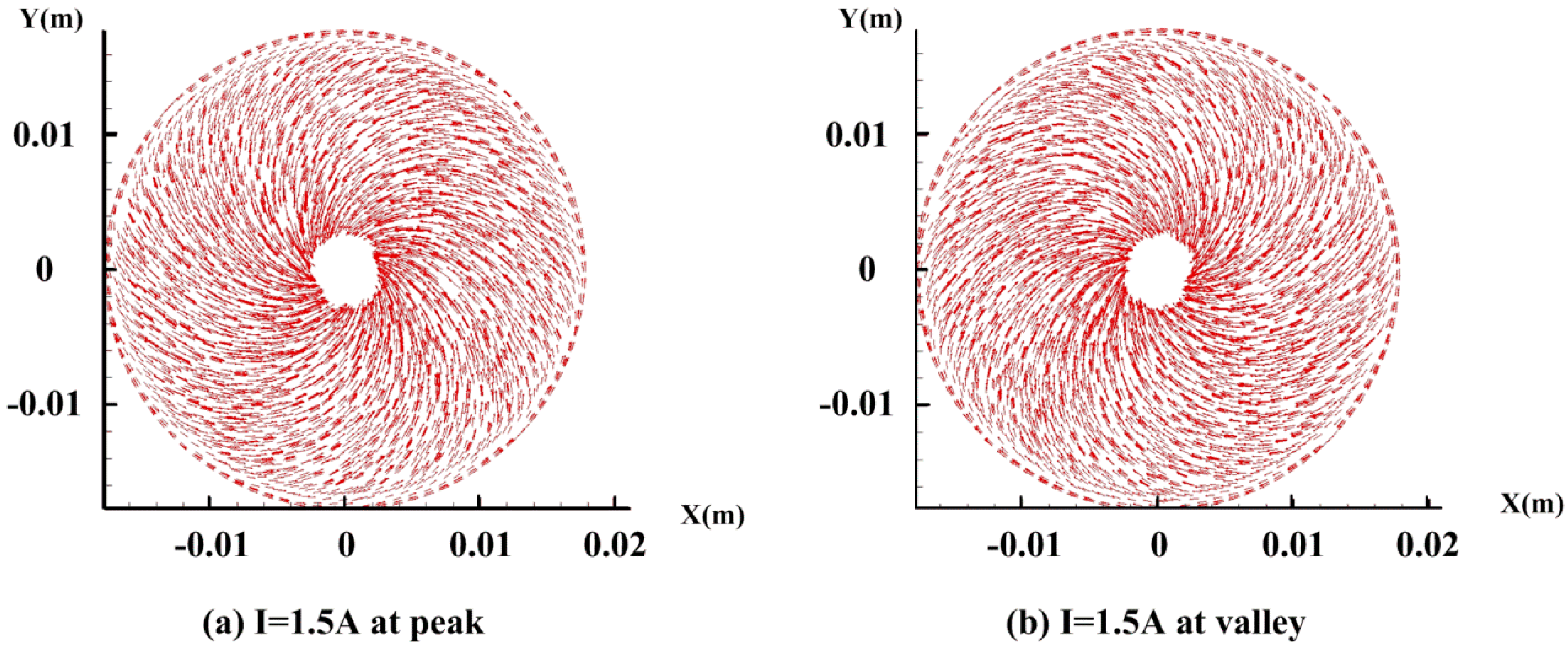
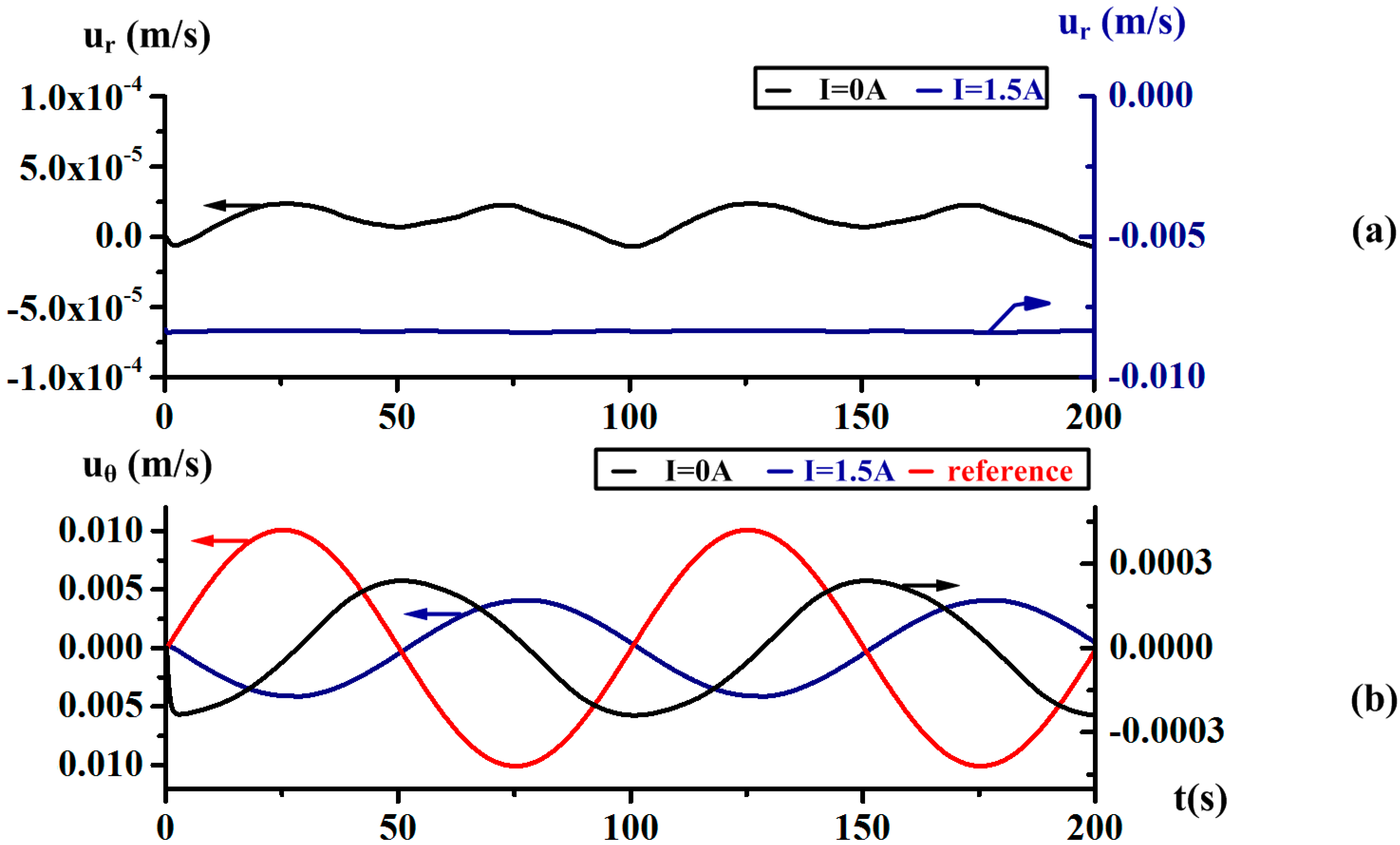
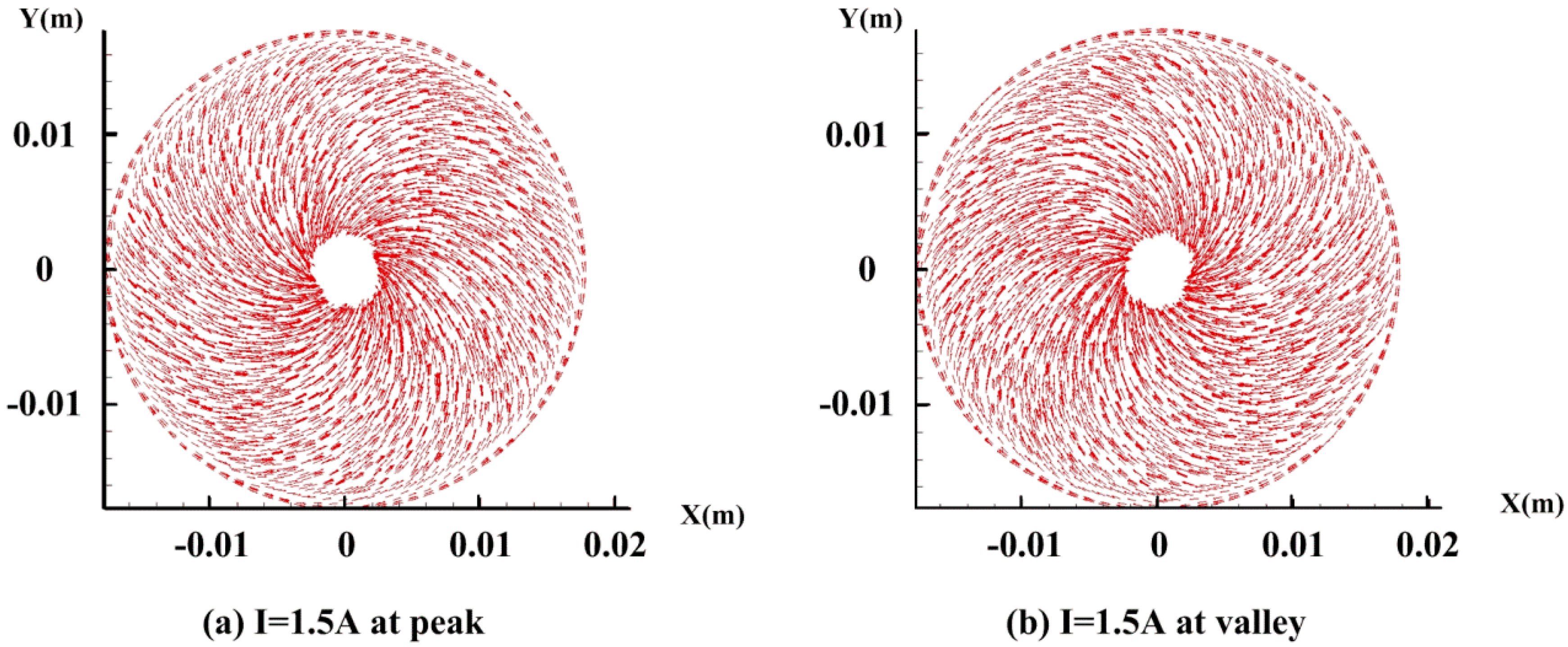
3.3. Simulation Results and Analysis on Coriolis Effect in C-MHD ARS
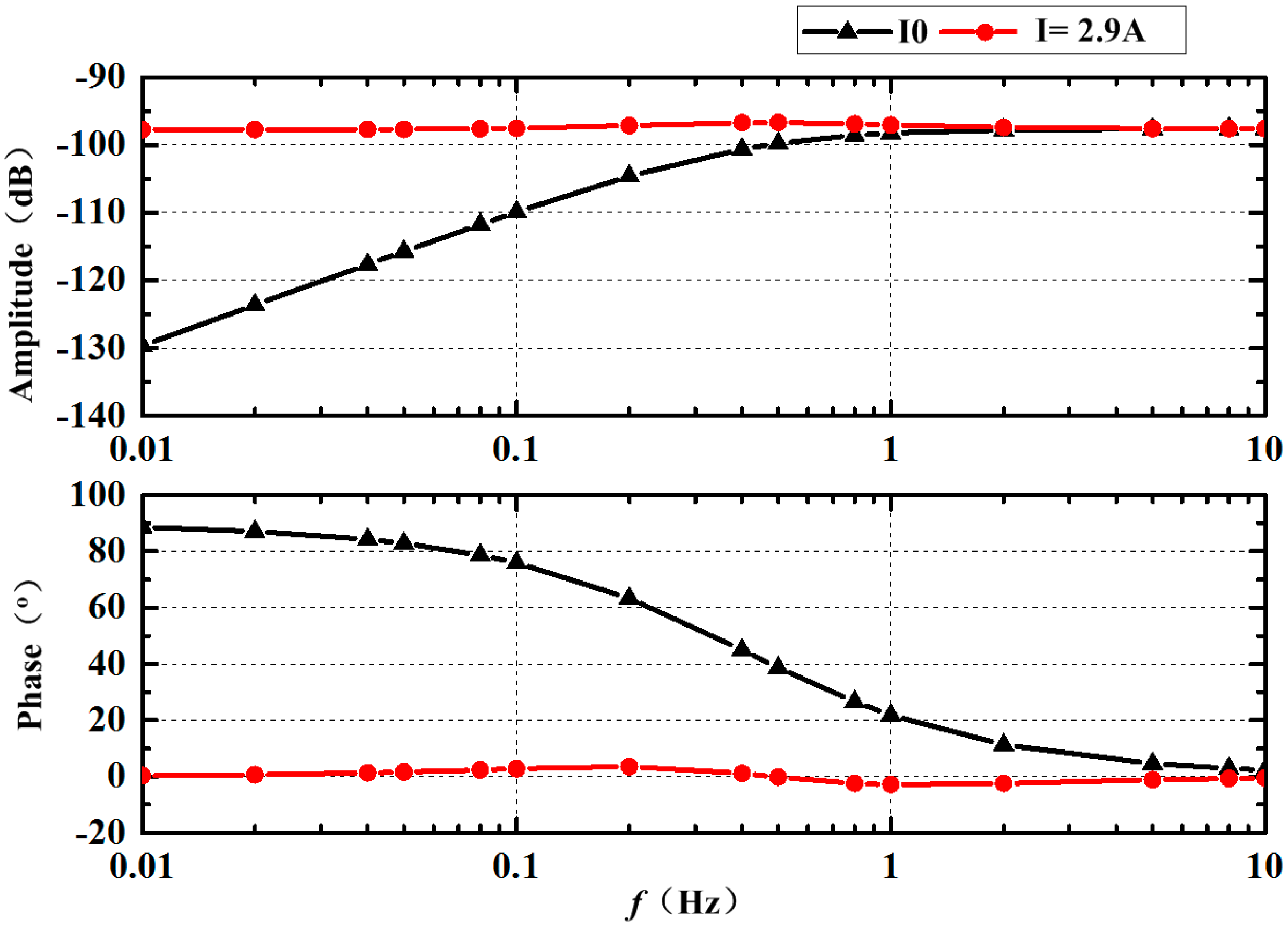
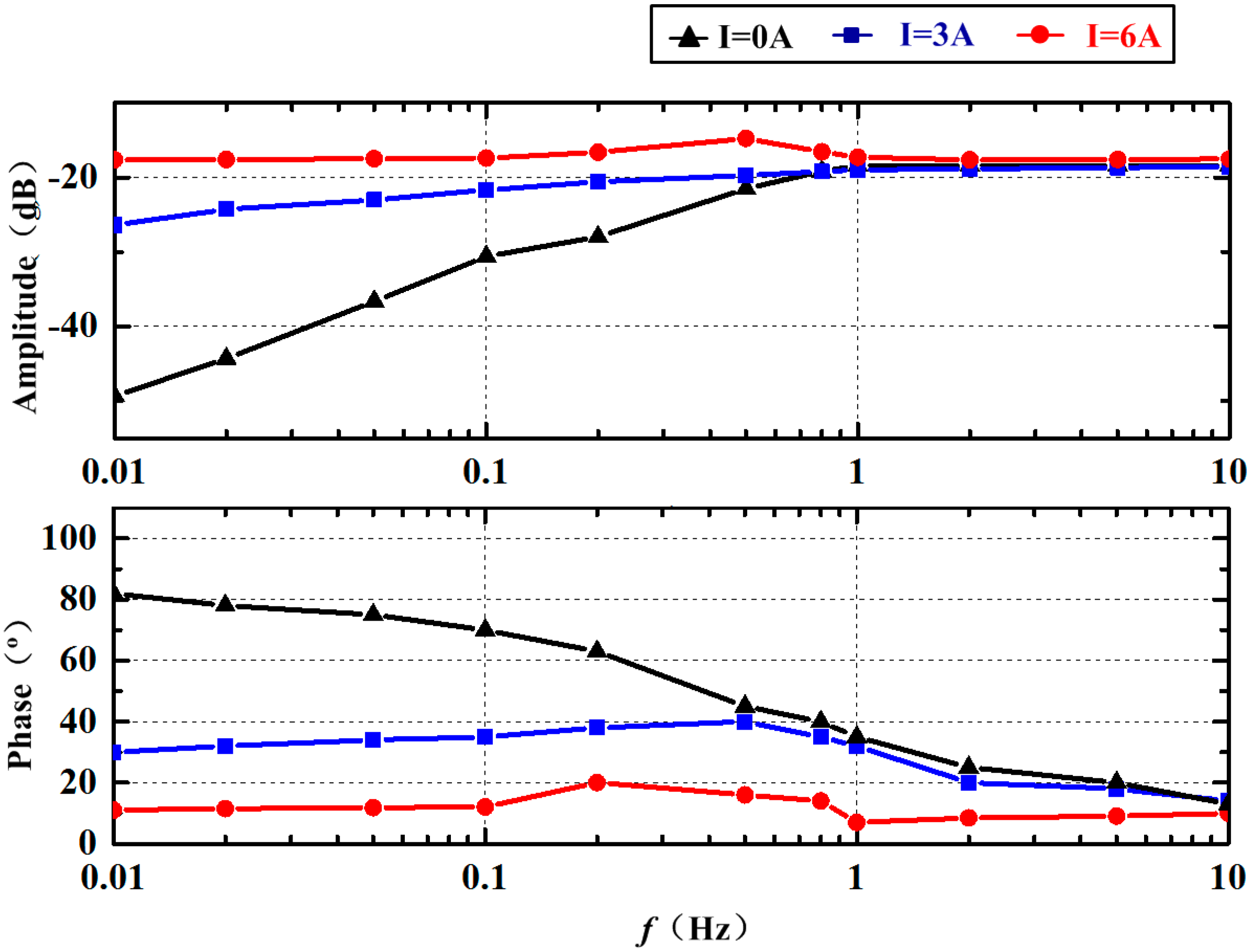
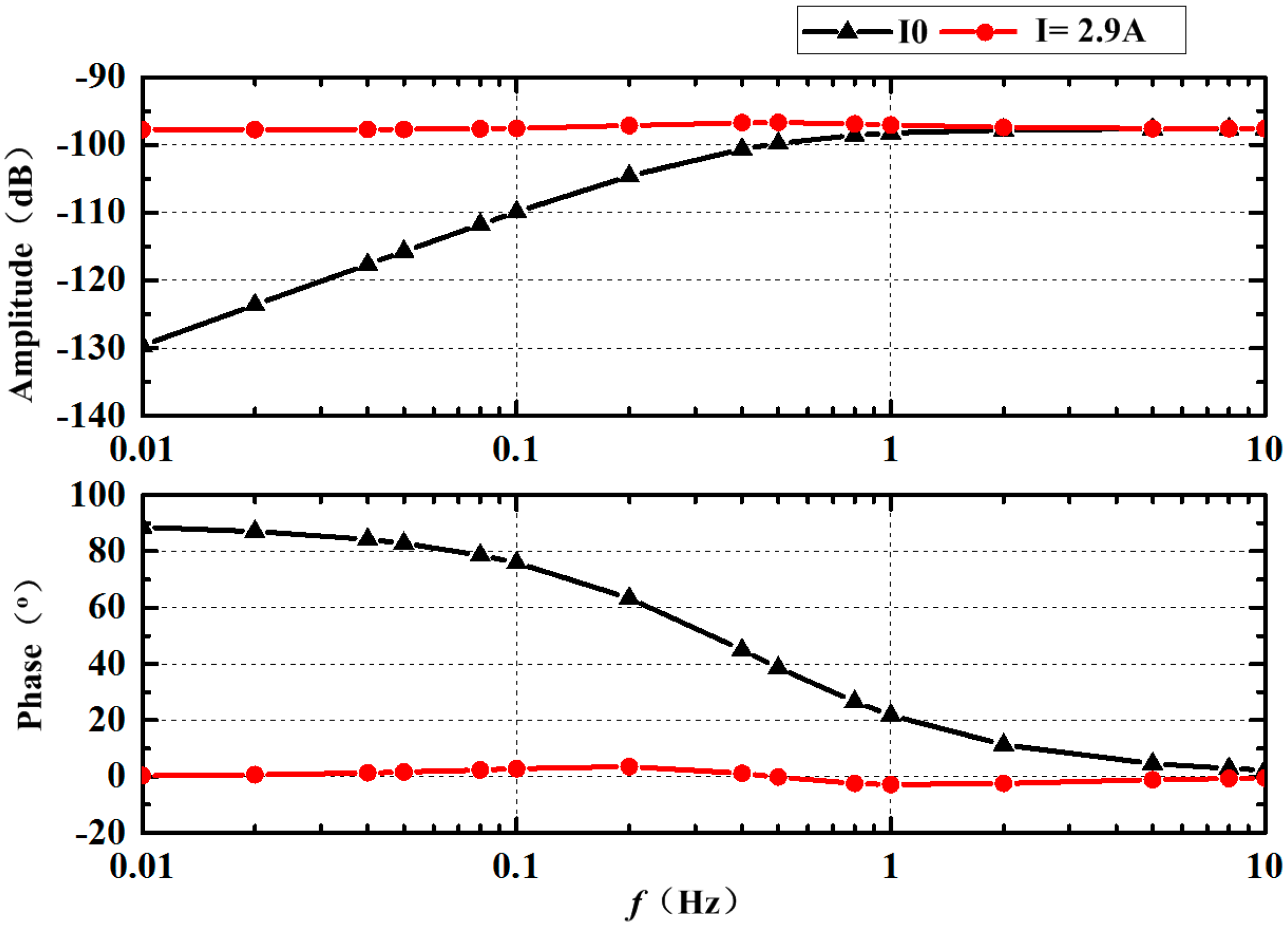
3.4. Simulation Results and Error Analysis of the Frequency Response of C-MHD ARS
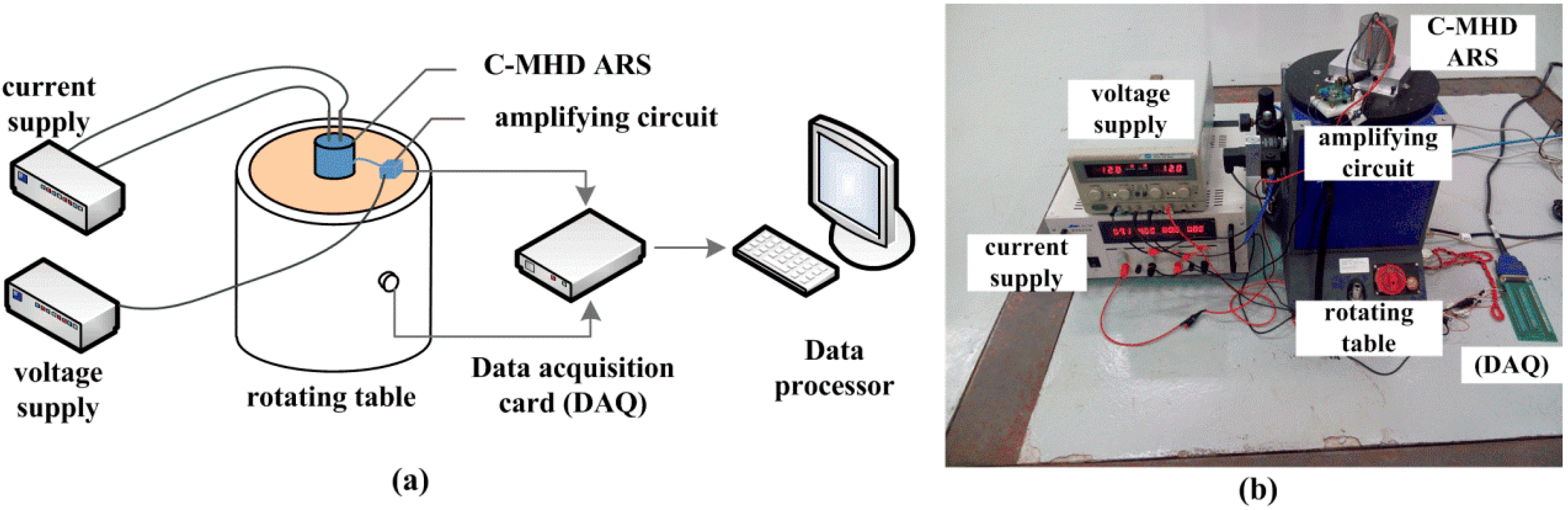
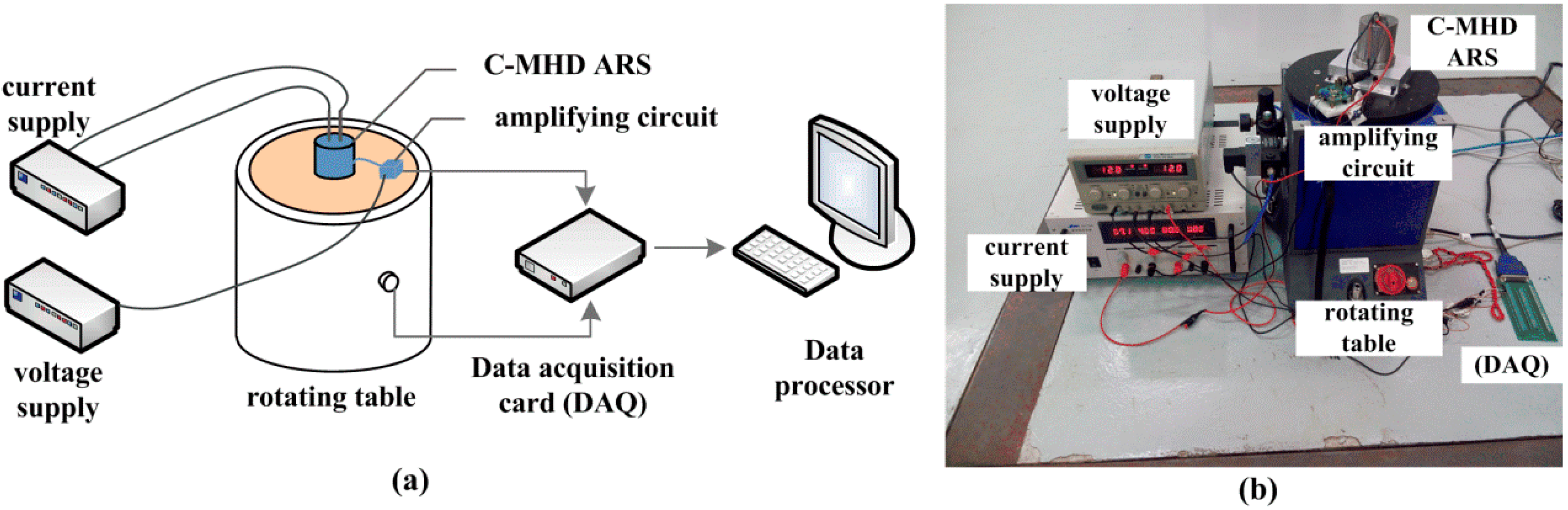
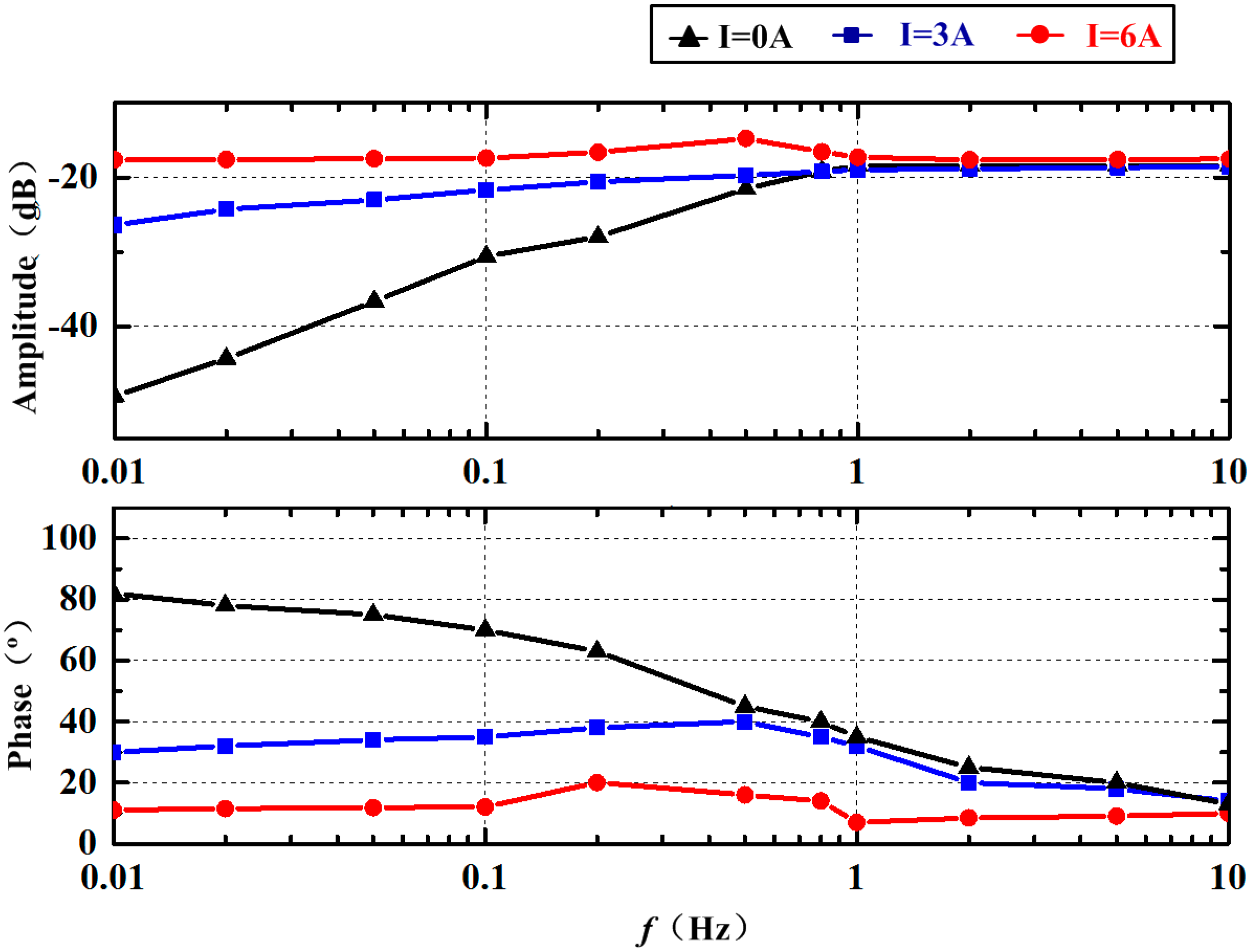
4. Experimental Results
5. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Addari, D.; Aglietti, G.S.; Remedia, M. Experimental and numerical investigation of coupled microvibration dynamics for satellite reaction wheels. J. Sound Vib. 2016, 386, 225–241. [Google Scholar] [CrossRef]
- Masten, M.K. Inertially stabilized platforms for optical imaging systems. Control Syst. IEEE 2008, 28, 47–64. [Google Scholar] [CrossRef]
- Toyoshima, M.; Takayama, Y.; Kunimori, H.; Jono, T. In-orbit measurements of spacecraft microvibrations for satellite laser communication links. Opt. Eng. 2010, 49, 578. [Google Scholar] [CrossRef]
- Burnside, J.W.; Murphy, D.V.; Knight, F.K.; Khatri, F.I. A Hybrid stabilization approach for deep-space optical communications terminals. Proc. IEEE 2007, 95, 2070–2081. [Google Scholar] [CrossRef]
- Weise, T.H.; Jung, M.; Langhans, D.; Gowin, M. Overview of directed energy weapon developments. In Proceedings of the Electromagnetic Launch Technology, Snowbird, UT, USA, 25–28 May 2004; pp. 483–489. [Google Scholar]
- Gilmore, J.P.; Luniewicz, M.F.; Sargent, D. Enhanced precision pointing jitter suppression system. In Proceedings of the SPIE 4632, Laser and Beam Control Technologies, San Jose, CA, USA, 4 June 2002; pp. 38–49. [Google Scholar]
- Laughlin, D.R.; Smith, D. Development and performance of an angular vibration sensor with 1–1000 Hz bandwidth and nanoradian level noise. In Proceedings of the International Symposium on Optical Science and Technology, Baltimore, MD, USA, 22 January 2002; pp. 208–214. [Google Scholar]
- Laughlin, D.R. A Magnetohydrodynamic Angular Motion Sensor for Anthropomorphic Test Device Instrumentation. 1989. Available online: https://www.sae.org/publications/technical-papers/content/892428/ (accessed on 9 June 2018).
- Anspach, J.E.; Sydney, P.F.; Hendry, G. Effects of base motion on space-based precision laser tracking in the Relay Mirror Experiment. In Proceedings of the SPIE 1482, Acquisition, Tracking, and Pointing V, Orlando, FL, USA, 1 August 1991; p. 12. [Google Scholar]
- Iwata, T.; Kawahara, T.; Muranaka, N.; Laughlin, D.R. High-Bandwidth pointing determination for the advanced land observing satellite (ALOS). In Proceedings of the Twenty-Fourth International Symposium on Space Technology and Science, Buenos Aires, Argentina, 25–31 July 2015; pp. 385–394. [Google Scholar]
- Boroson, D.M.; Robinson, B.S.; Murphy, D.V.; Burianek, D.A.; Khatri, F.; Kovalik, J.M.; Sodnik, Z.; Cornwell, D.M. Overview and results of the lunar laser communication demonstration. In Proceedings of the Free-Space Laser Communication and Atmospheric Propagation XXVI, San Francisco, CA, USA, 6 March 2014; pp. 89710–89711. [Google Scholar]
- Ji, Y.; Li, X.; Wu, T.; Chen, C. Modified analytical model of magnetohydrodynamics angular rate sensor for low-frequency compensation. Sens. Rev. 2016, 36, 193–199. [Google Scholar] [CrossRef]
- Liu, A.; Blaurock, C.; Bourkland, K.; Morgenstern, W.; Maghami, P. Solar dynamics observatory on-orbit jitter testing, analysis, and mitigation plans. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Portland, OR, USA, 8–11 August 2011; pp. 730–739. [Google Scholar]
- Xue, B.; Chen, X. Image quality degradation analysis induced by satellite platform harmonic vibration. In Proceedings of the International Conference on Optical Instruments and Technology: Optoelectronic Imaging and Process Technology, Shanghai, China, 19–21 October 2009; p. 75130N. [Google Scholar]
- Martin, P.; Crandall, J.; Pilkey, W.; Chou, C.; Fileta, B. Measurement techniques for angular velocity and acceleration in an impact environment. In Proceedings of the SAE International Congress and Exposition, Detroit, MI, USA, 24–27 February 1997. SAE Technical Paper. [Google Scholar]
- Merkle, A.; Wing, I.; Szcepanowski, R.; McGee, B.; Voo, L.; Kleinberger, M. Evaluation of Angular Rate Sensor Technologies for Assessment of Rear Impact Occupant Responses; John Hopkins University Applied Physics Laboratory for NHTSA: Laurel, MD, USA, 2007. [Google Scholar]
- Farr, W.; Regehr, M.; Wright, M.; Sheldon, D.; Sahasrabudhe, A.; Gin, J.; Nguyen, D. Overview and design of the DOT flight laser transceiver. IPN Prog. Rep. 2011, 42, 185. [Google Scholar]
- Laughlin, D.R.; Hawes, M.A.; Blackburn, J.P.; Sebesta, H.R. Low-cost alternative to gyroscopes for tracking-system stabilization. In Proceedings of the Acquisition, Tracking, and Pointing IV, Orlando, FL, USA, 16–20 April 1990; pp. 2–13. [Google Scholar]
- Algrain, M.C. High-bandwidth attitude jitter determination for pointing and tracking systems. Opt. Eng. 1997, 36, 2092–2100. [Google Scholar] [CrossRef]
- Pinney, C.; Hawes, M.A.; Blackburn, J. A cost-effective inertial motion sensor for short-duration autonomous navigation. In Proceedings of the Position Location and Navigation Symposium, Las Vegas, NV, USA, 11–15 April 1994; pp. 591–597. [Google Scholar]
- Iwata, T.; Kawahara, T.; Muranaka, N.; Laughlin, D.R. High-bandwidth attitude determination using jitter measurements and optimal filtering. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Chicago, IL, USA, 10–13 August 2009; pp. 7349–7369. [Google Scholar]
- Burnside, J.W.; Conrad, S.D.; Pillsbury, A.D.; Devoe, C.E. Design of an inertially stabilized telescope for the LLCD. In Proceedings of the Conference on Free-space Laser Communication Technologies XXIII, San Francisco, CA, USA, 22–27 January 2011; p. 79230L. [Google Scholar]
- Laughlin, D.R. Low Frequency Angular Velocity Sensor. U.S. Patent US5176030, 5 January 1993. [Google Scholar]
- Ji, Y.; Li, X.; Wu, T.; Chen, C. Theoretical and experimental study of radial velocity generation for extending bandwidth of magnetohydrodynamic angular rate sensor at low frequency. Sensors 2015, 15, 31606–31619. [Google Scholar] [CrossRef] [PubMed]
- Wagner, J.F.; Lippens, V.; Nagel, V.; Morlock, M.; Vollmer, M. Generalising Integrated Navigation Systems: The Example of the Attitude Reference System for an Ankle Exercise Board. Available online: https://www.researchgate.net/publication/259851160_Generalising_Integrated_Navigation_Systems_The_Example_of_the_Attitude_Reference_System_for_an_Ankle_Exercise_Board (accessed on 9 June 2018).
- Baraniello, V.R.; Cicala, M.; Corraro, F. An extension of integrated navigation algorithms to estimate elastic motions of very flexible aircrafts. In Proceedings of the Aerospace Conference, Big Sky, MT, USA, 6–13 March 2010; IEEE: Piscataway, NJ, USA, 2011; pp. 1–14. [Google Scholar]
- Laughlin, D.; Sebesta, H.; Eckelkamp-Baker, D. A dual function magnetohydrodynamic(MHD) device for angular motion measurement and control. Adv. Astronaut. Sci. 2002, 111, 335–347. [Google Scholar]
- Cowling, T.G.; Lindsay, R. Magnetohydrodynamics; Physics Today; Interscience Publishers: New York, NY, USA, 1957; Volume 10, p. 40. [Google Scholar]
- Chang, C.C.; Lundgren, T.S. Duct flow in magnetohydrodynamics. Z. Angew. Math. Phys. 1961, 12, 100–114. [Google Scholar] [CrossRef]
- Davidson, P.A. An Introduction to Magnetohydrodynamics; Cambridge University Press: Cambridge, UK, 2001. [Google Scholar]
- Zhang, Z.; Wu, Y.; Jia, M.; Song, H.; Sun, Z.; Li, Y. MHD-RLC discharge model and the efficiency characteristics of plasma synthetic jet actuator. Sens. Actuators A Phys. 2017, 261, 75–84. [Google Scholar] [CrossRef]
- Egorov, E.; Agafonov, V.; Avdyukhina, S.; Borisov, S. Angular molecular–electronic sensor with negative magnetohydrodynamic feedback. Sensors 2018, 18, 245. [Google Scholar] [CrossRef] [PubMed]
- Ji, Y.; Li, X.; Wu, T.; Chen, C.; Yang, Y. Study on magnetohydrodynamics angular rate sensor under non-uniform magnetic field. Sens. Rev. 2016, 36, 359–367. [Google Scholar] [CrossRef]
- Ji, Y.; Li, X.; Wu, T.; Chen, C.; Zhang, S. Quantitative analysis method of error sources in magnetohydrodynamic angular rate sensor for structure optimization. IEEE Sens. J. 2016, 16, 4345–4353. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mechanical Structure Parameters | (mm) | Physical Parameters of Conducting Fluid | Galinstan |
|---|---|---|---|
| Inner radius of annular channel | 4 | density ρ (kg/m3) | 6.4 × 103 |
| Outer radius of annular channel | 14.5 | dynamic viscosity υ·ρ (kg/cm3) | 0.0024 |
| Height of upper and bottom channel | 2 | electric conductivity σ (s/m) | 3.46 × 106 |
| Thickness of outside channel | 2 | Magnetic permeability μ (H/m) | 1.257 × 10−6 |
| Thickness of central channel | 2 | melting point (°C) | −19 |
| Width of central channel | 10 | boiling point (°C) | >1300 |
| Total height | 37 | Gravity | √ |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ji, Y.; Xu, M.; Li, X.; Wu, T.; Tuo, W.; Wu, J.; Dong, J. Error Analysis of Magnetohydrodynamic Angular Rate Sensor Combing with Coriolis Effect at Low Frequency. Sensors 2018, 18, 1921. https://doi.org/10.3390/s18061921
Ji Y, Xu M, Li X, Wu T, Tuo W, Wu J, Dong J. Error Analysis of Magnetohydrodynamic Angular Rate Sensor Combing with Coriolis Effect at Low Frequency. Sensors. 2018; 18(6):1921. https://doi.org/10.3390/s18061921
Chicago/Turabian StyleJi, Yue, Mengjie Xu, Xingfei Li, Tengfei Wu, Weixiao Tuo, Jun Wu, and Jiuzhi Dong. 2018. "Error Analysis of Magnetohydrodynamic Angular Rate Sensor Combing with Coriolis Effect at Low Frequency" Sensors 18, no. 6: 1921. https://doi.org/10.3390/s18061921
APA StyleJi, Y., Xu, M., Li, X., Wu, T., Tuo, W., Wu, J., & Dong, J. (2018). Error Analysis of Magnetohydrodynamic Angular Rate Sensor Combing with Coriolis Effect at Low Frequency. Sensors, 18(6), 1921. https://doi.org/10.3390/s18061921