A Self-Organized Reciprocal Decision Approach for Sensing Coverage with Multi-UAV Swarms


Abstract
:1. Introduction
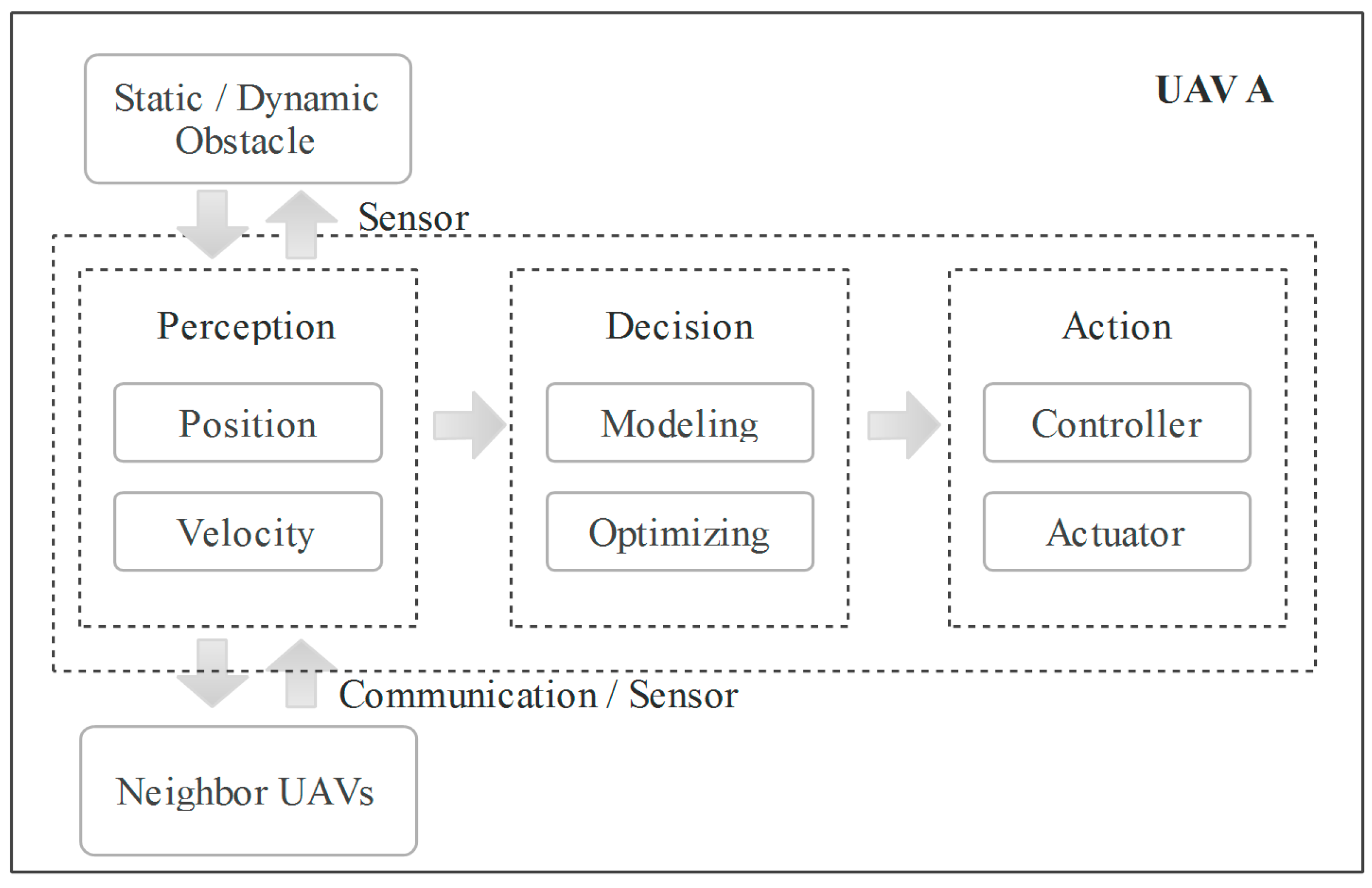
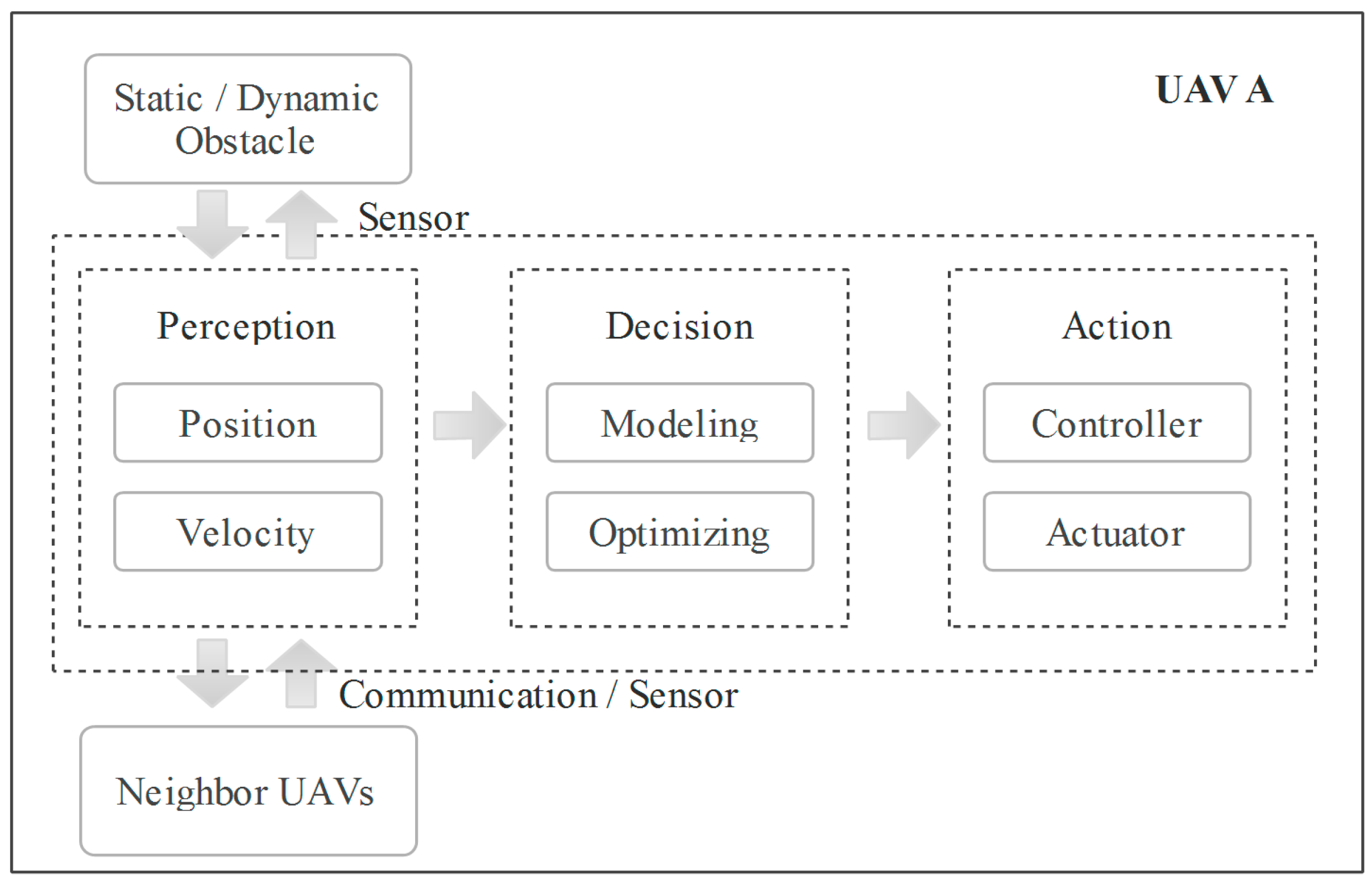
2. Basic Idea
3. Reciprocal Decision Approach
3.1. Two-UAV Cooperative Coverage
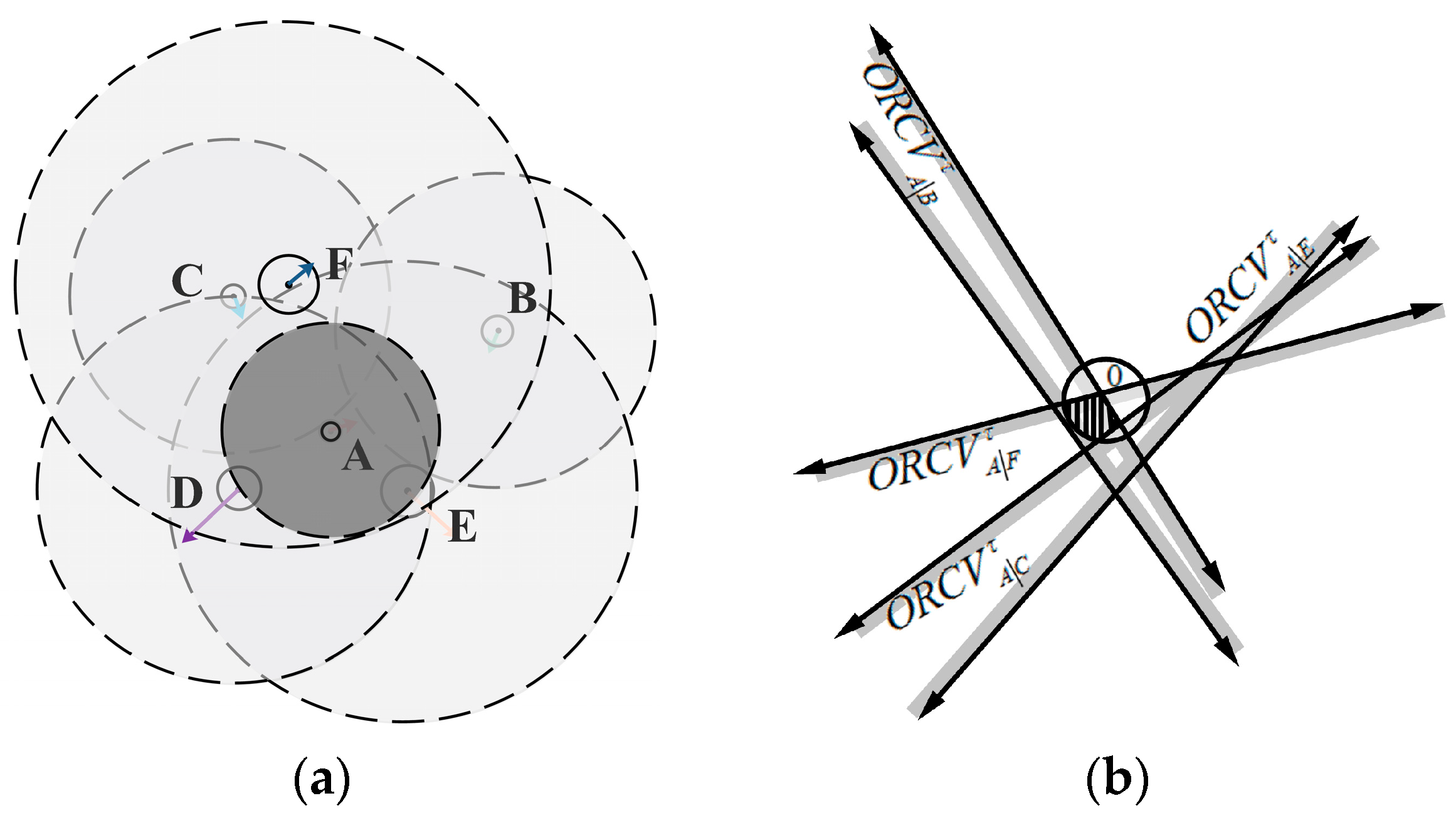
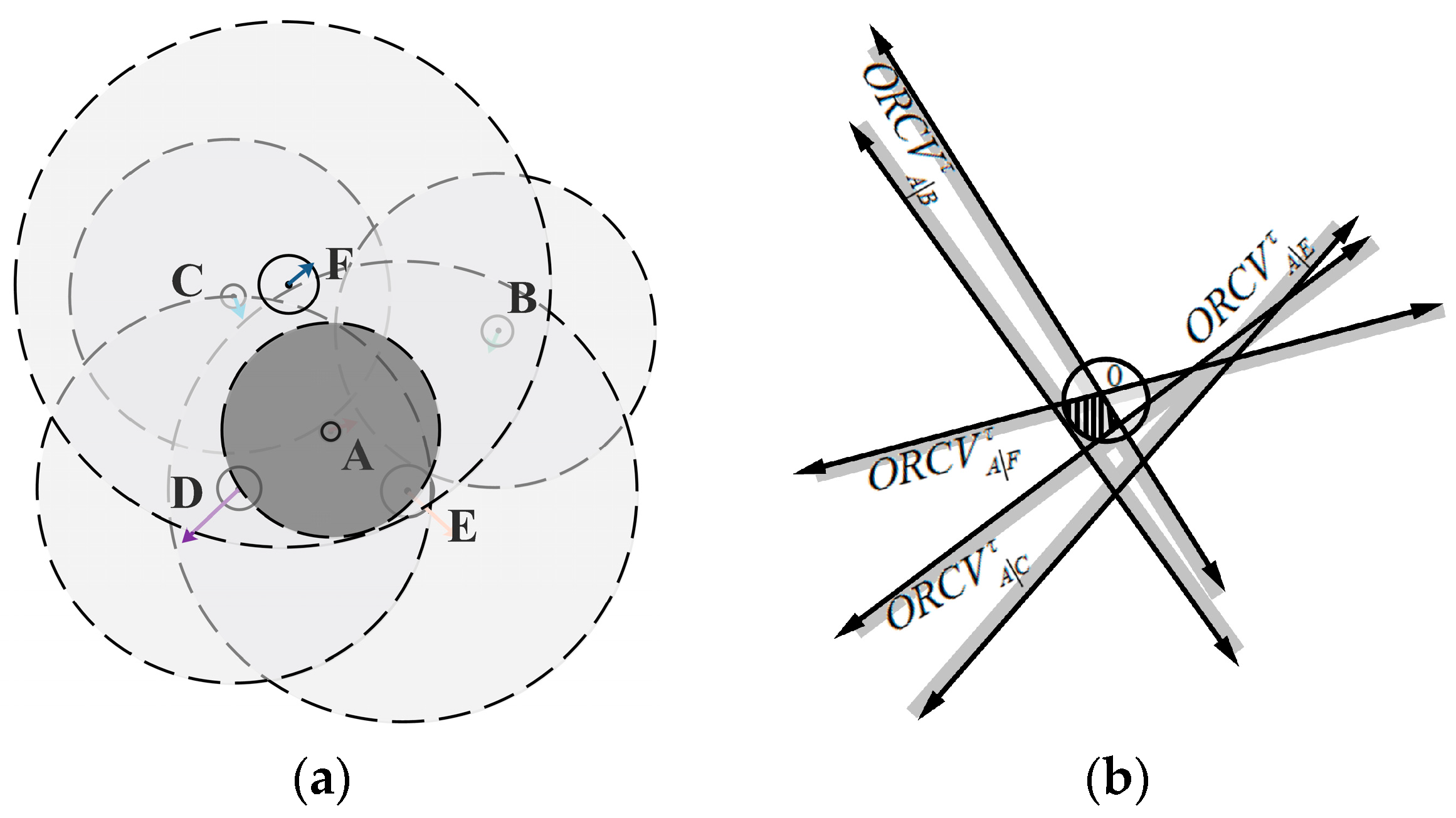
3.2. Multi-UAV Swarm Coverage
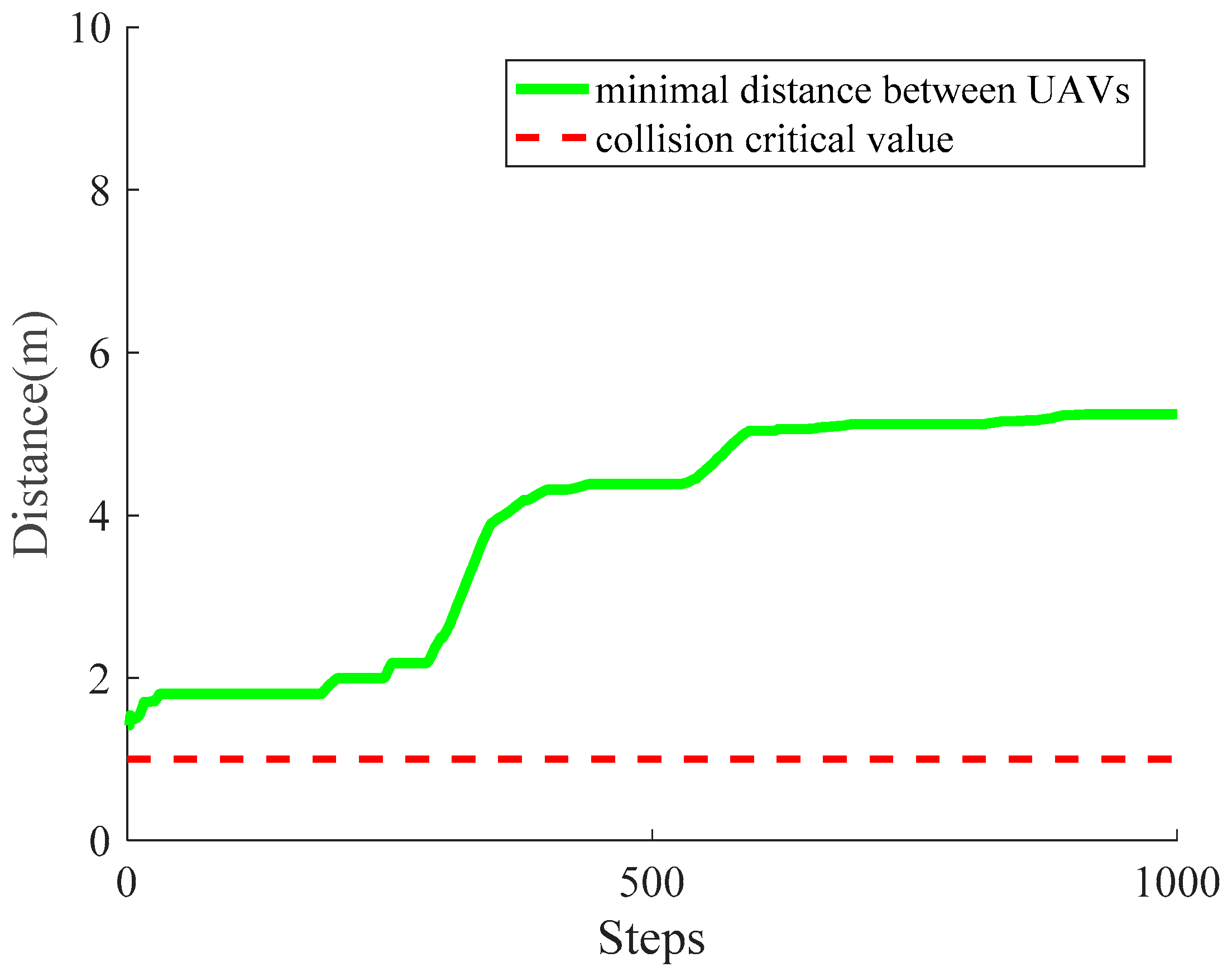
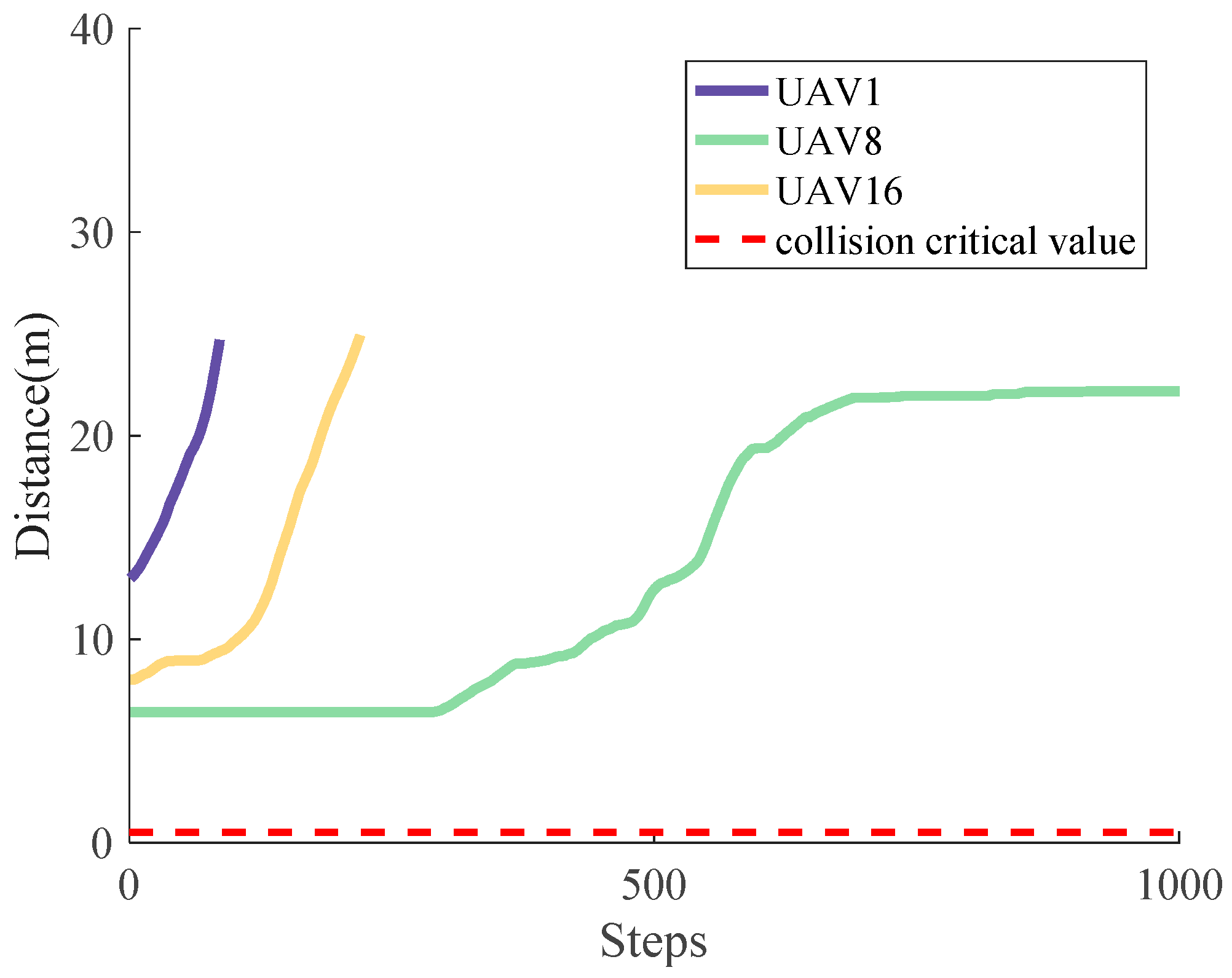
3.3. Collision-Free Constrains
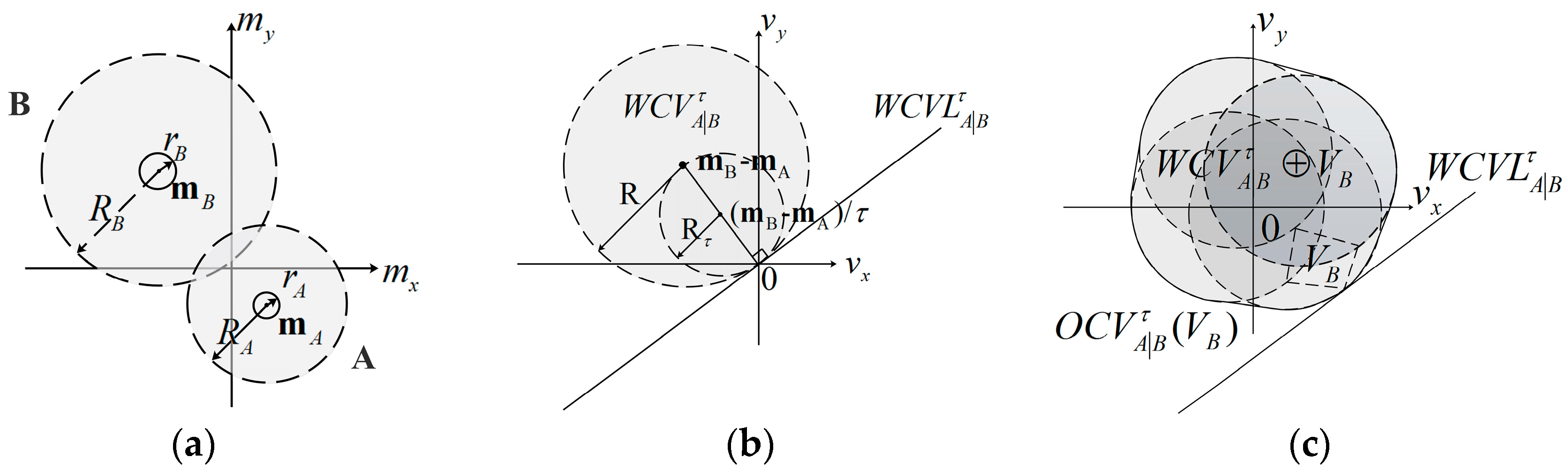
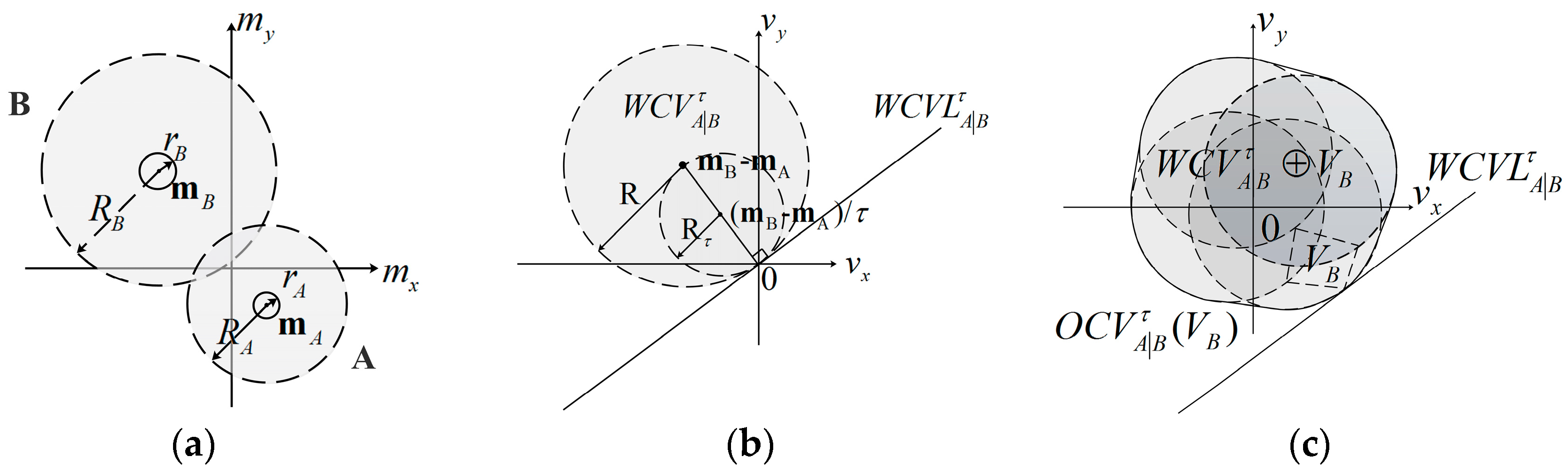
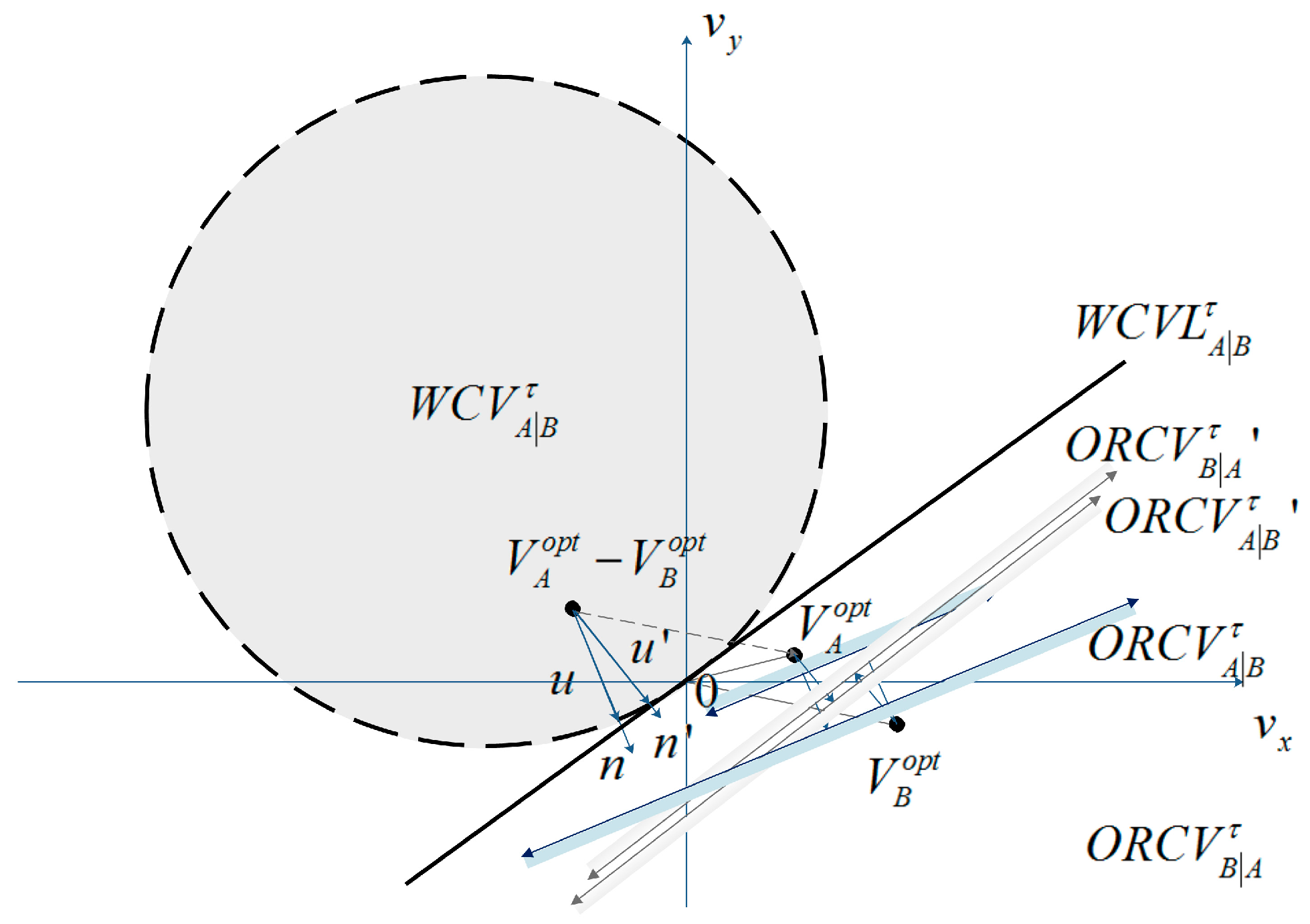
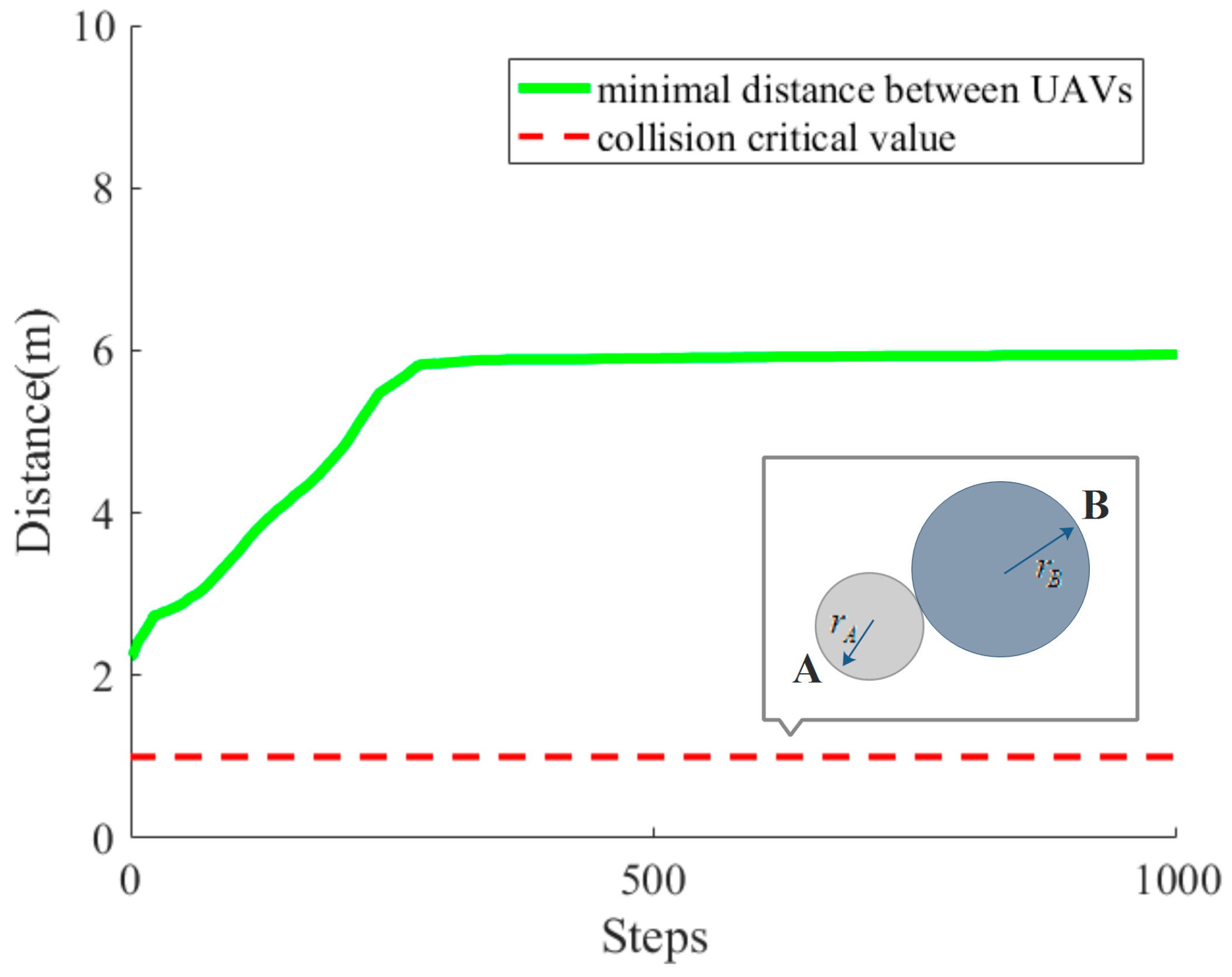
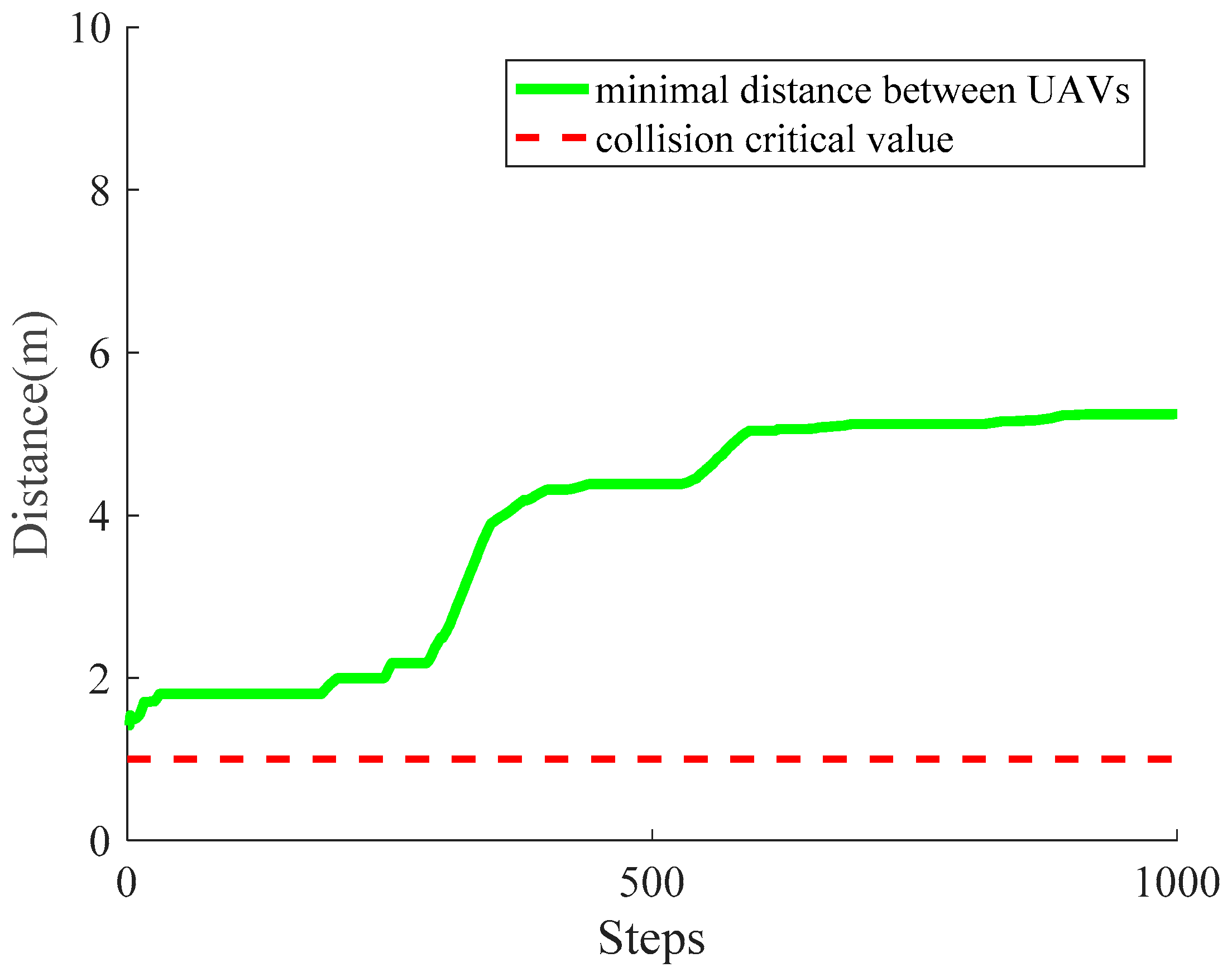
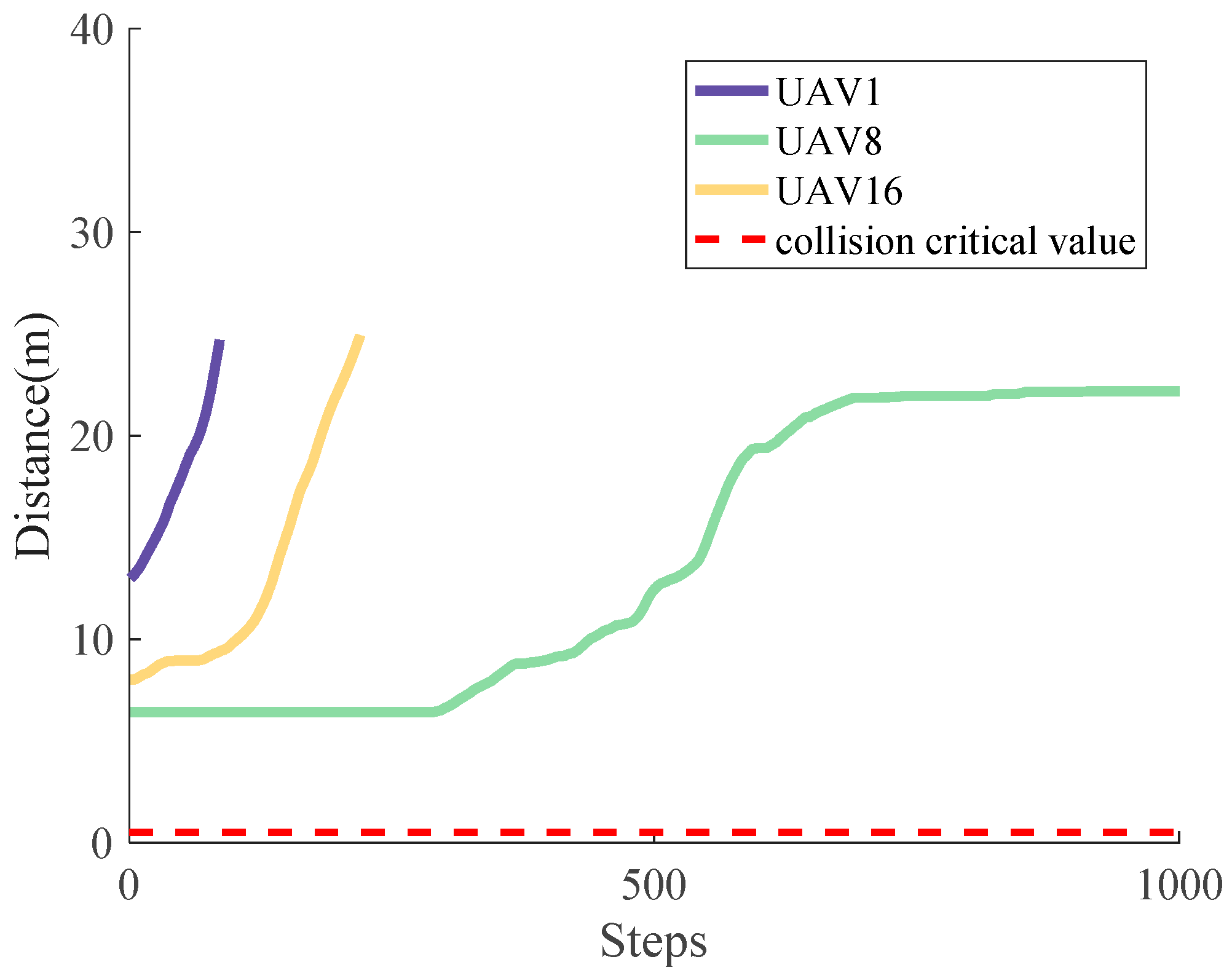
3.3.1. Collision Avoidance between UAVs
3.3.2. Avoiding Collision with Obstacles
Static Obstacle
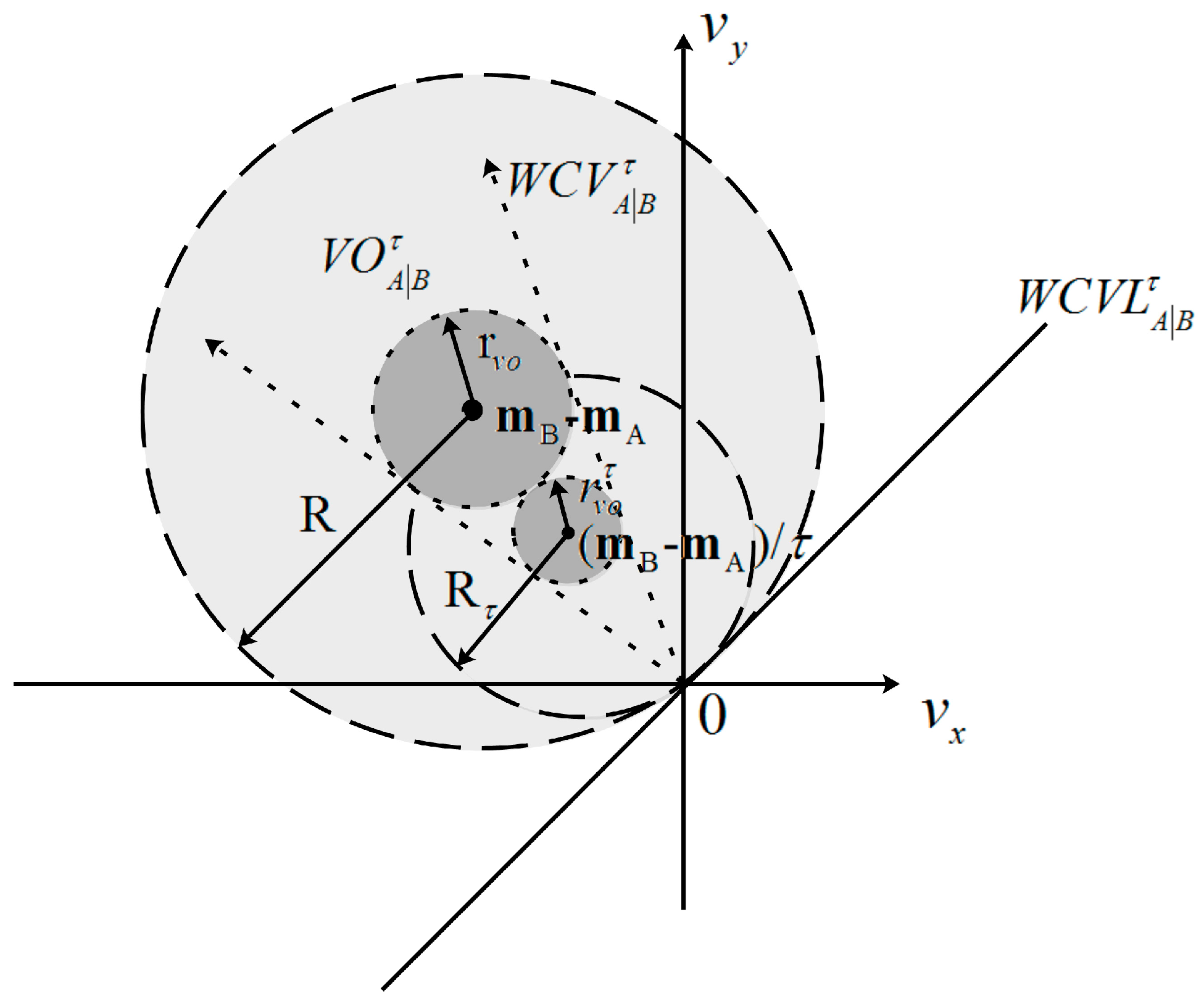
Dynamic Obstacle
4. Optimal Velocity Decision
4.1. Random Probability Method
4.2. Optimum Available
| Algorithm 1. Random Probability Exploration of the Optimal Velocity . |
| Input: UAV maximal velocity , constrains of neighbor UAVs Output: The optimal velocity decision 1: Computational Rectangle Domain: 2: Random Velocity: 3: Set the Accuracy: 4: Initialization: , , 5: while do 6: if then 7: if then 8: 9: 10: end if 11: end if 12: 13: end while 14: Output The optimal velocity has been explored. 15: return. |
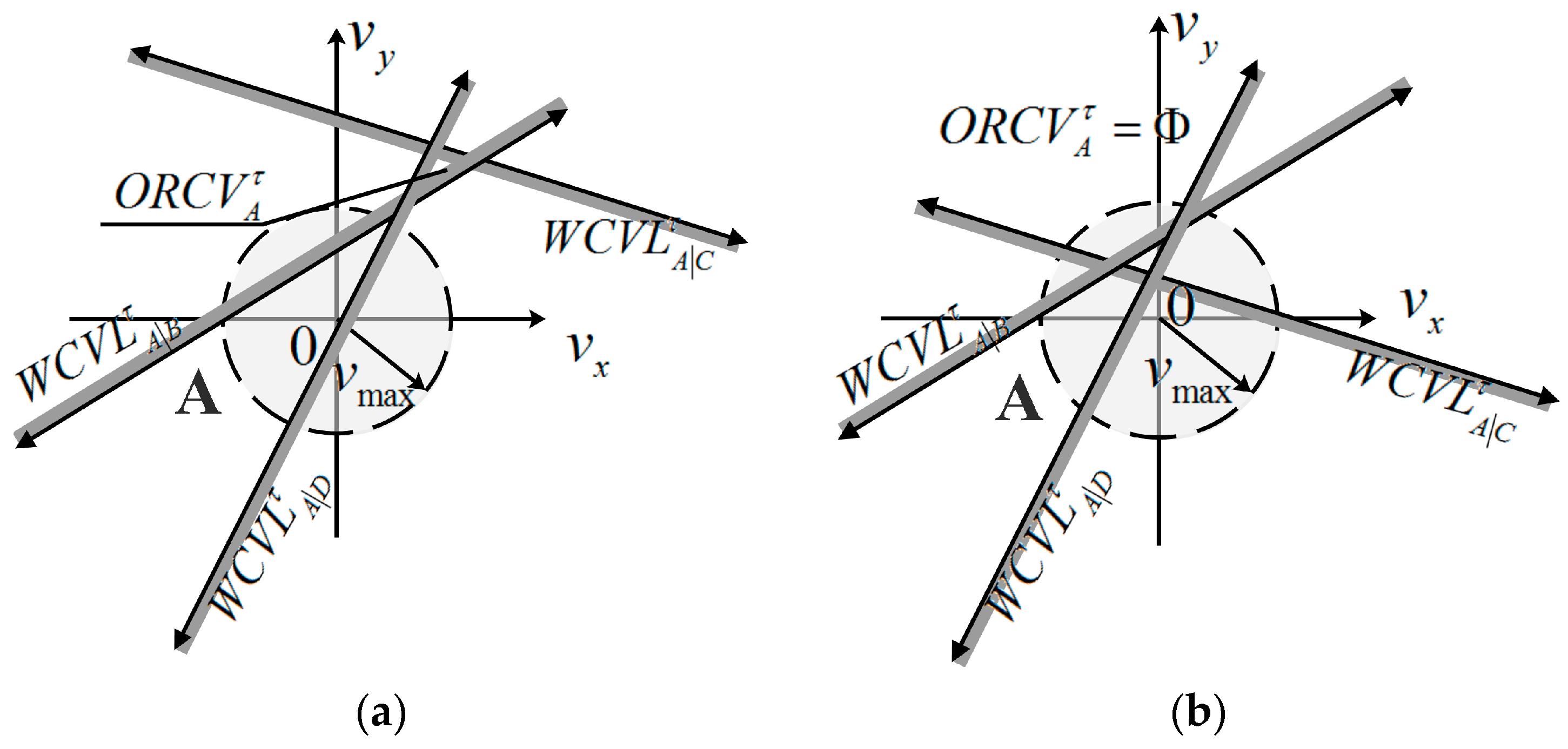
4.3. Vacant Optimal Velocity Space
| Algorithm 2. Lounger strategy. |
| Input: UAV A maximal velocity , constrains of neighbor UAVs Output: The optimal velocity decision Process 1~13 is same as Algorithm 1 14: if 15: Output Adopt idle velocity. 16: end if 17: return. |
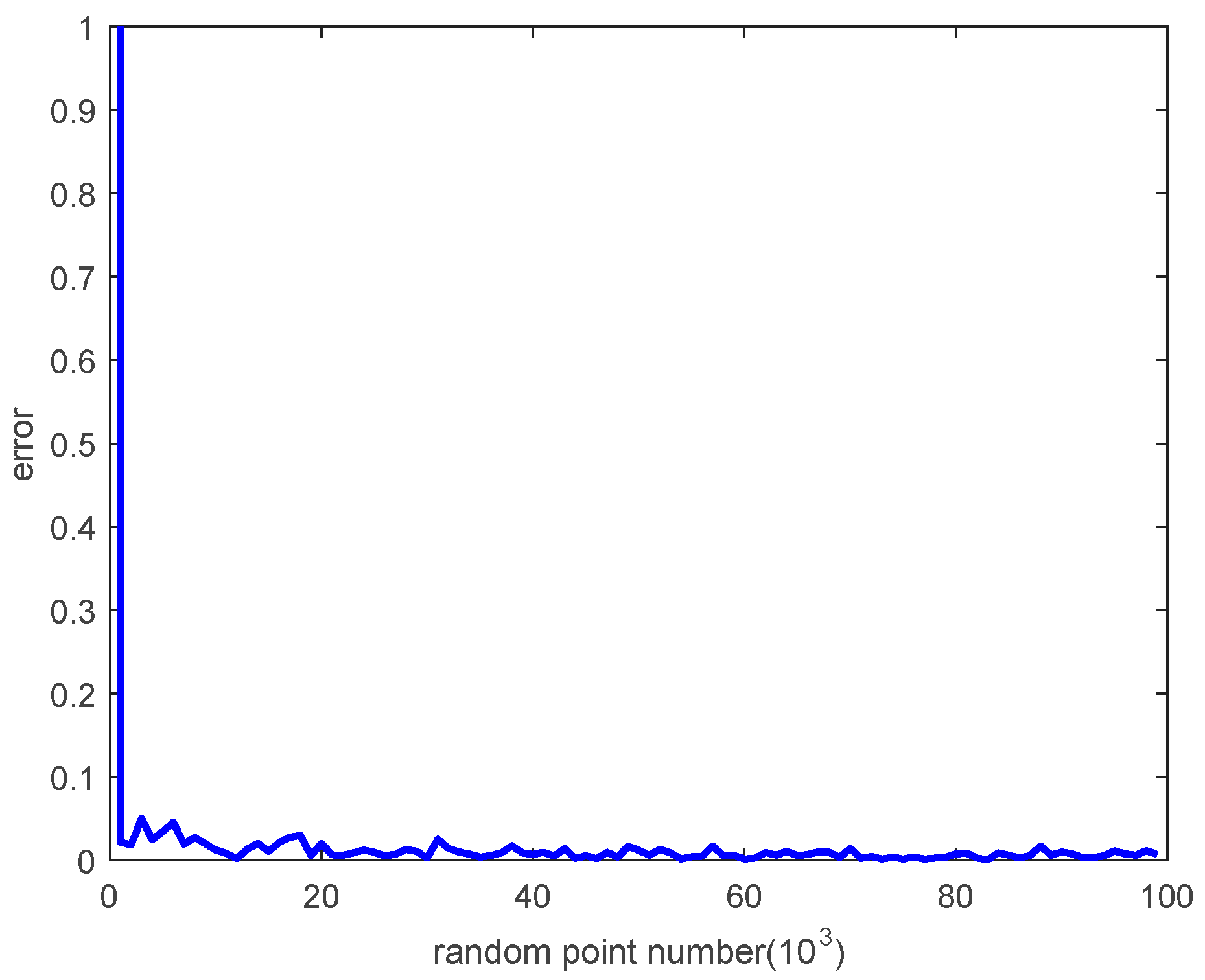
4.4. Numerical Test
4.4.1. Available Set
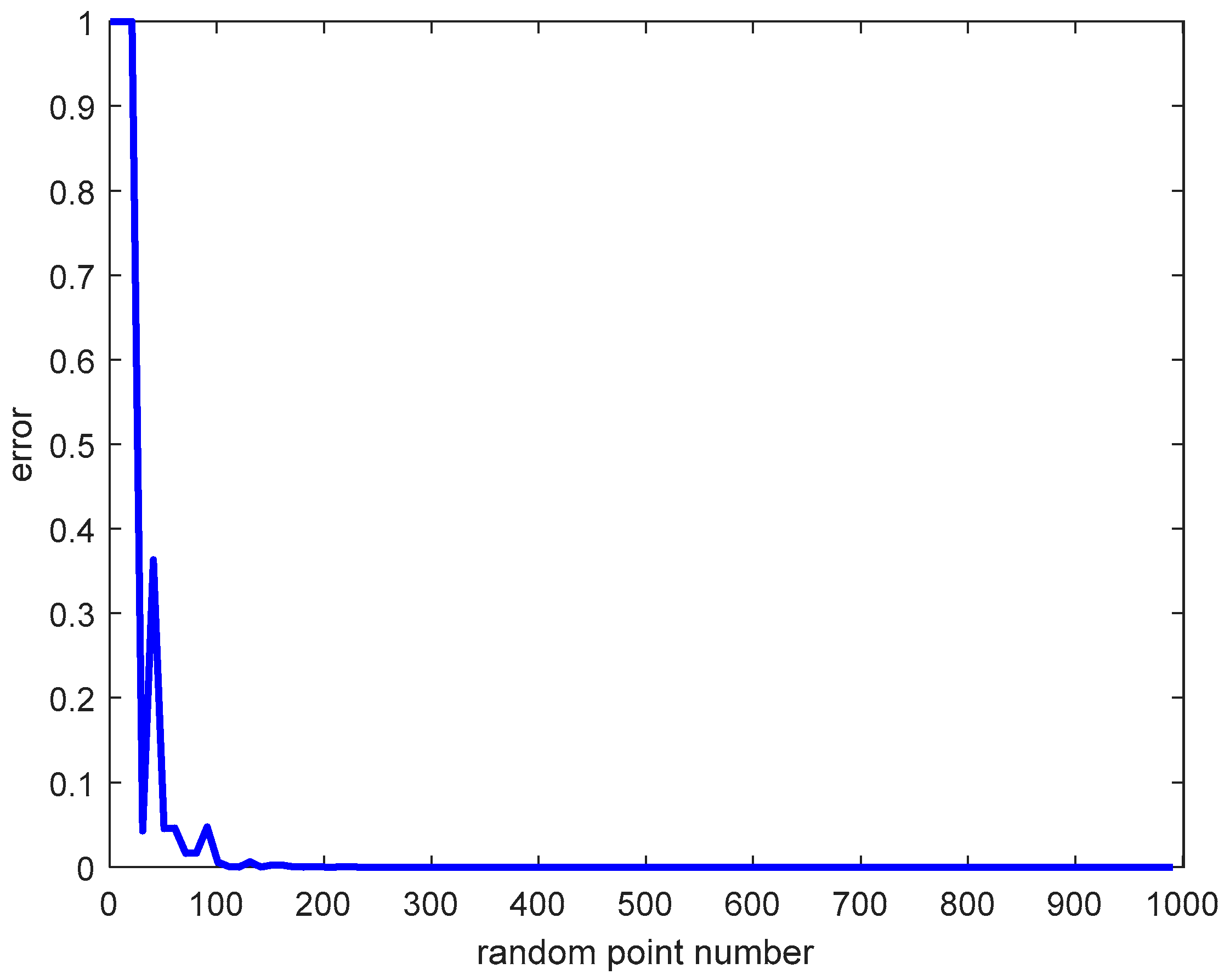
4.4.2. Null Set
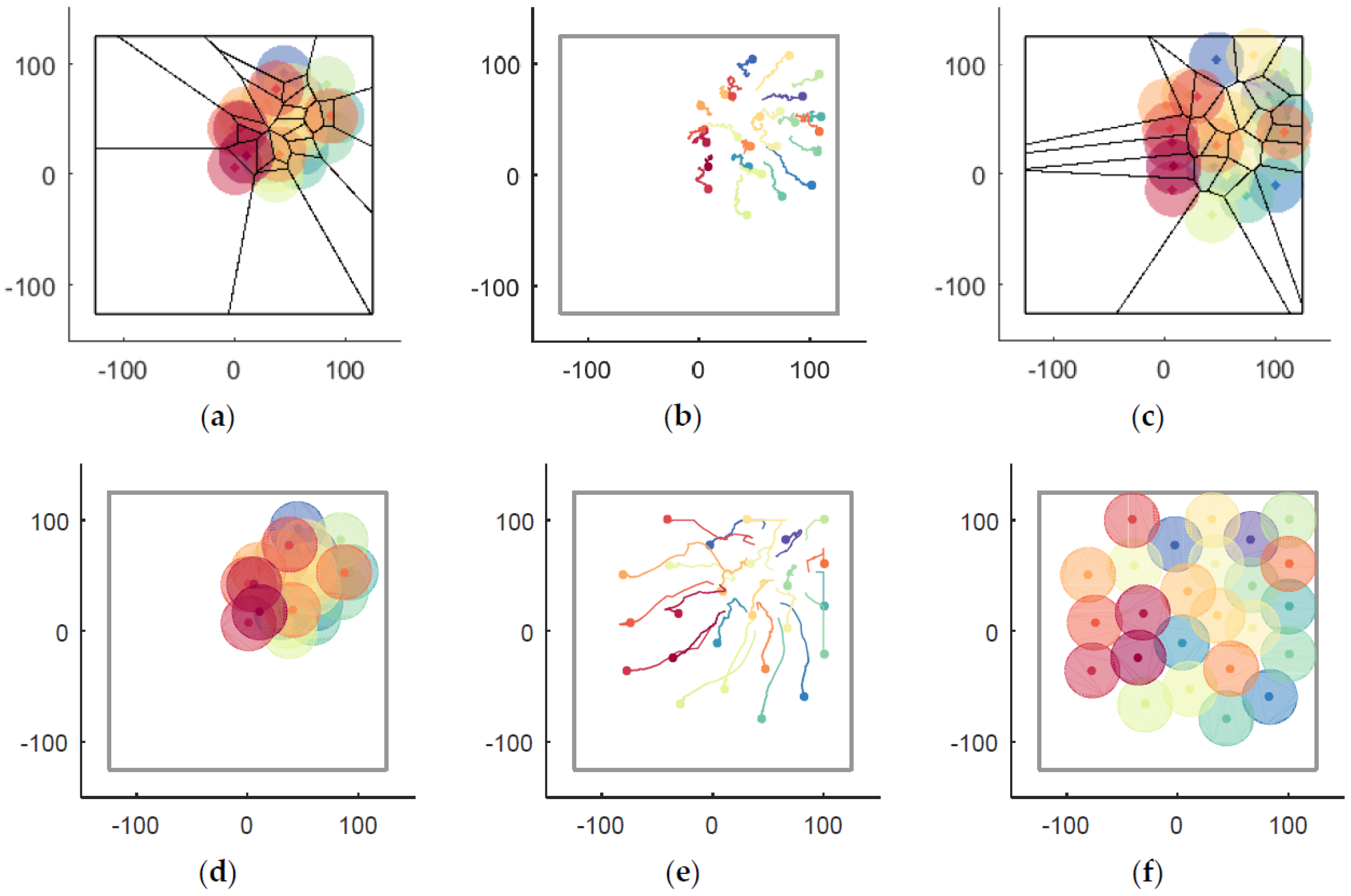
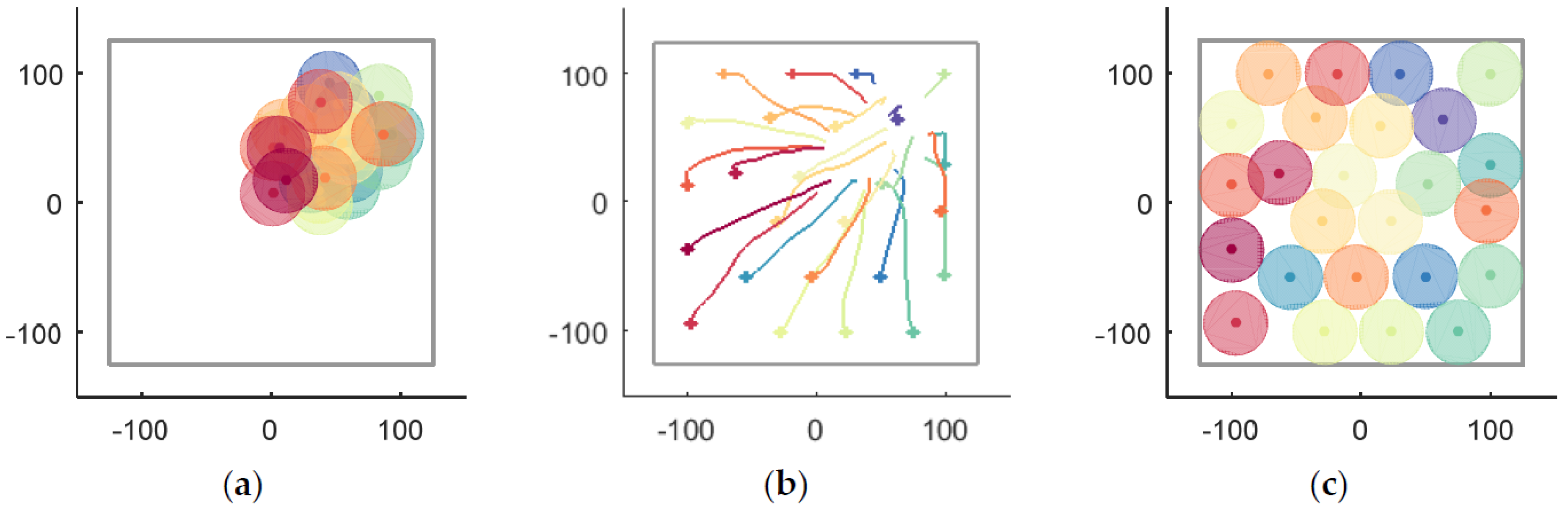
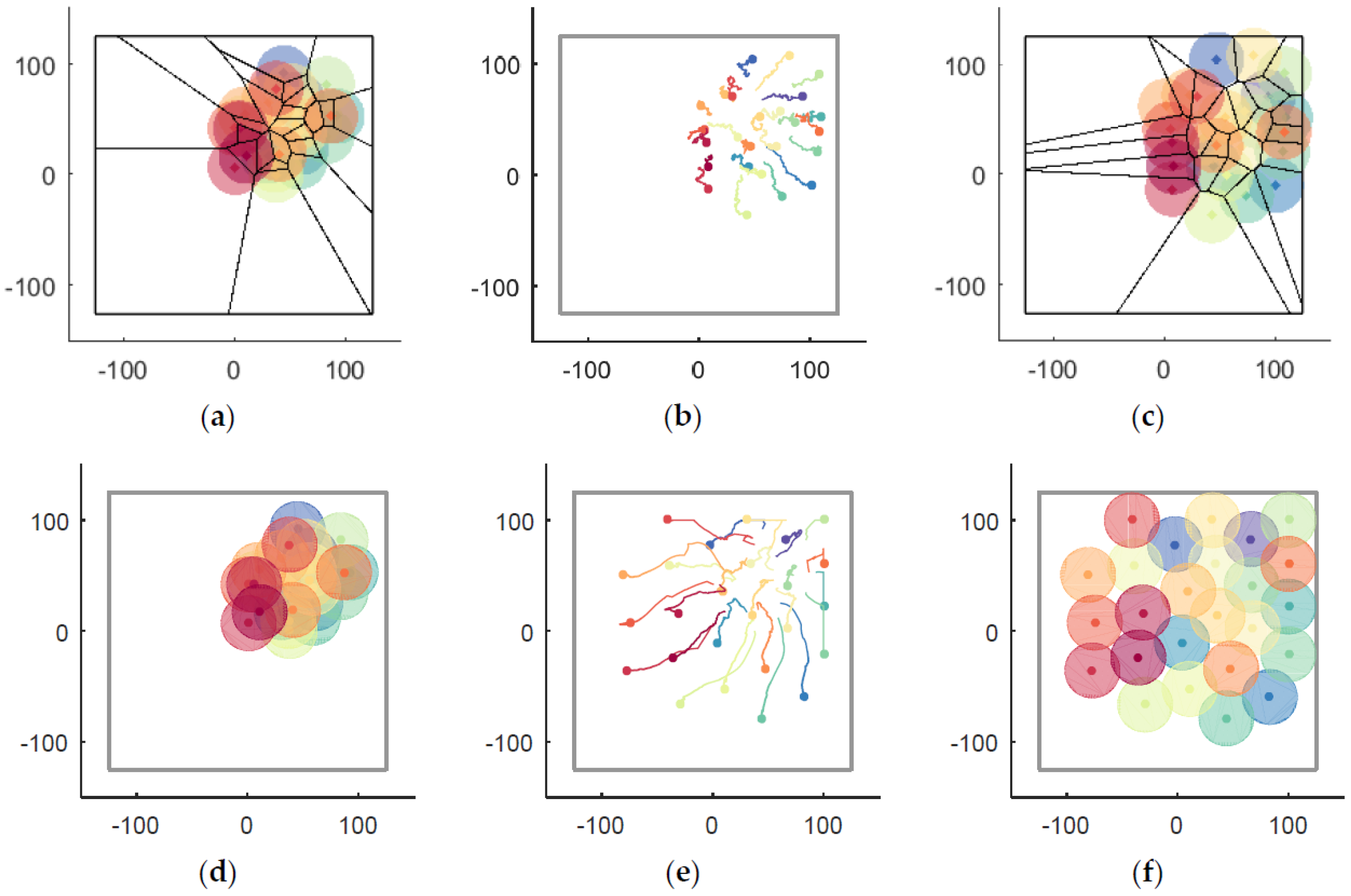
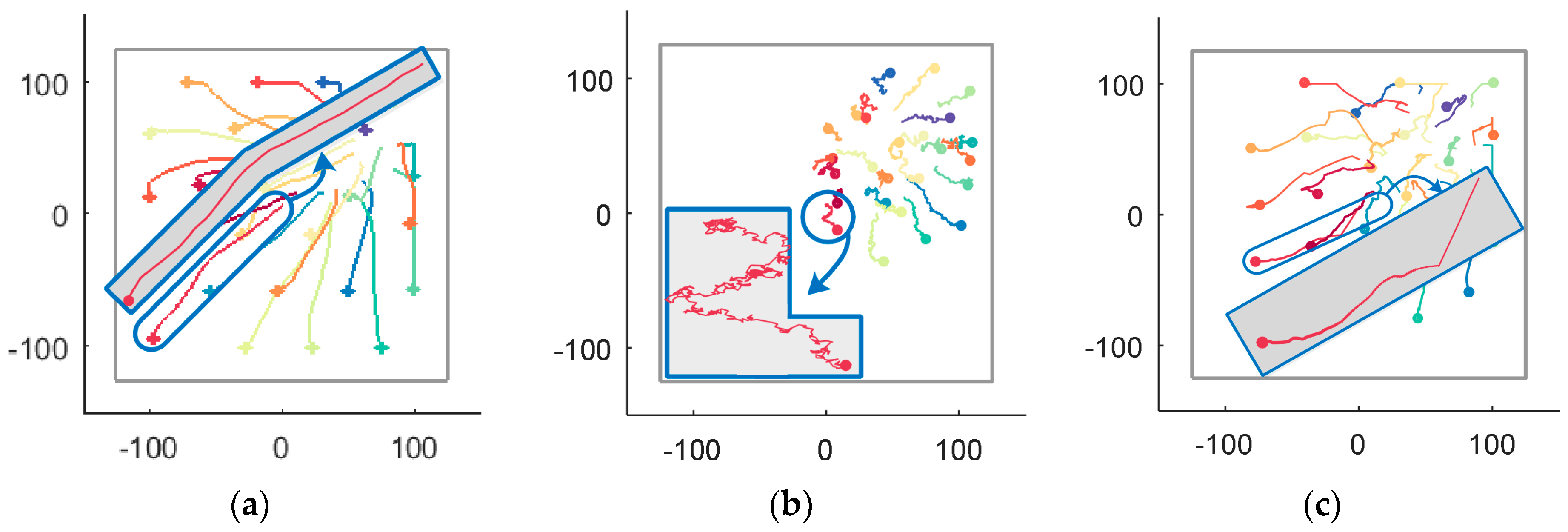
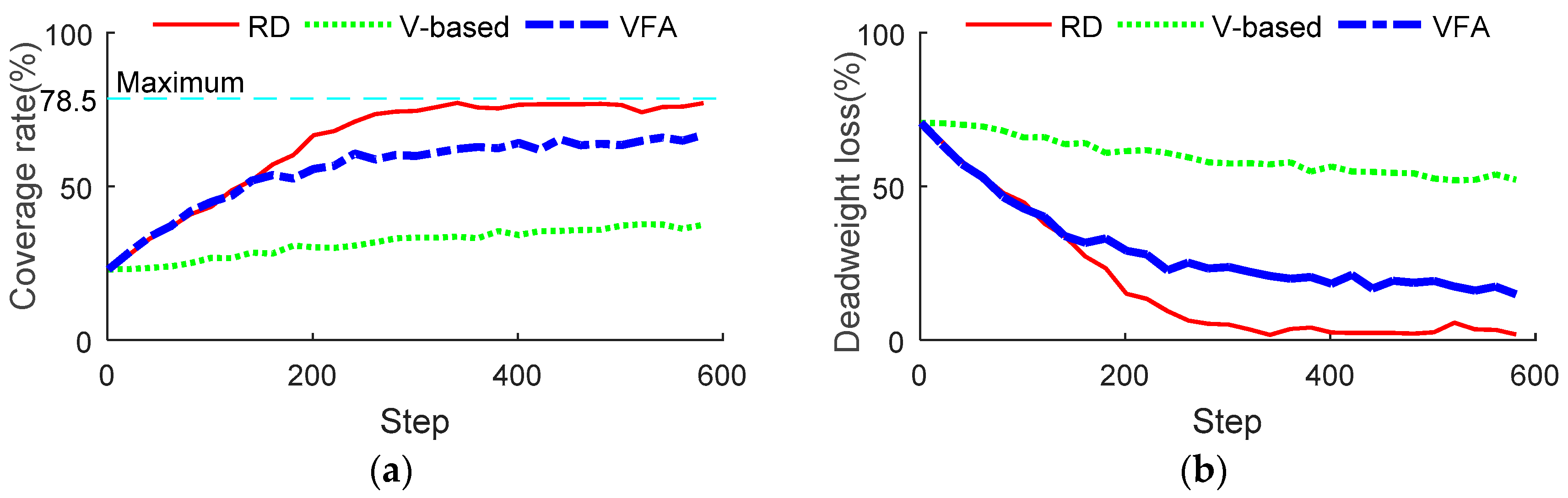
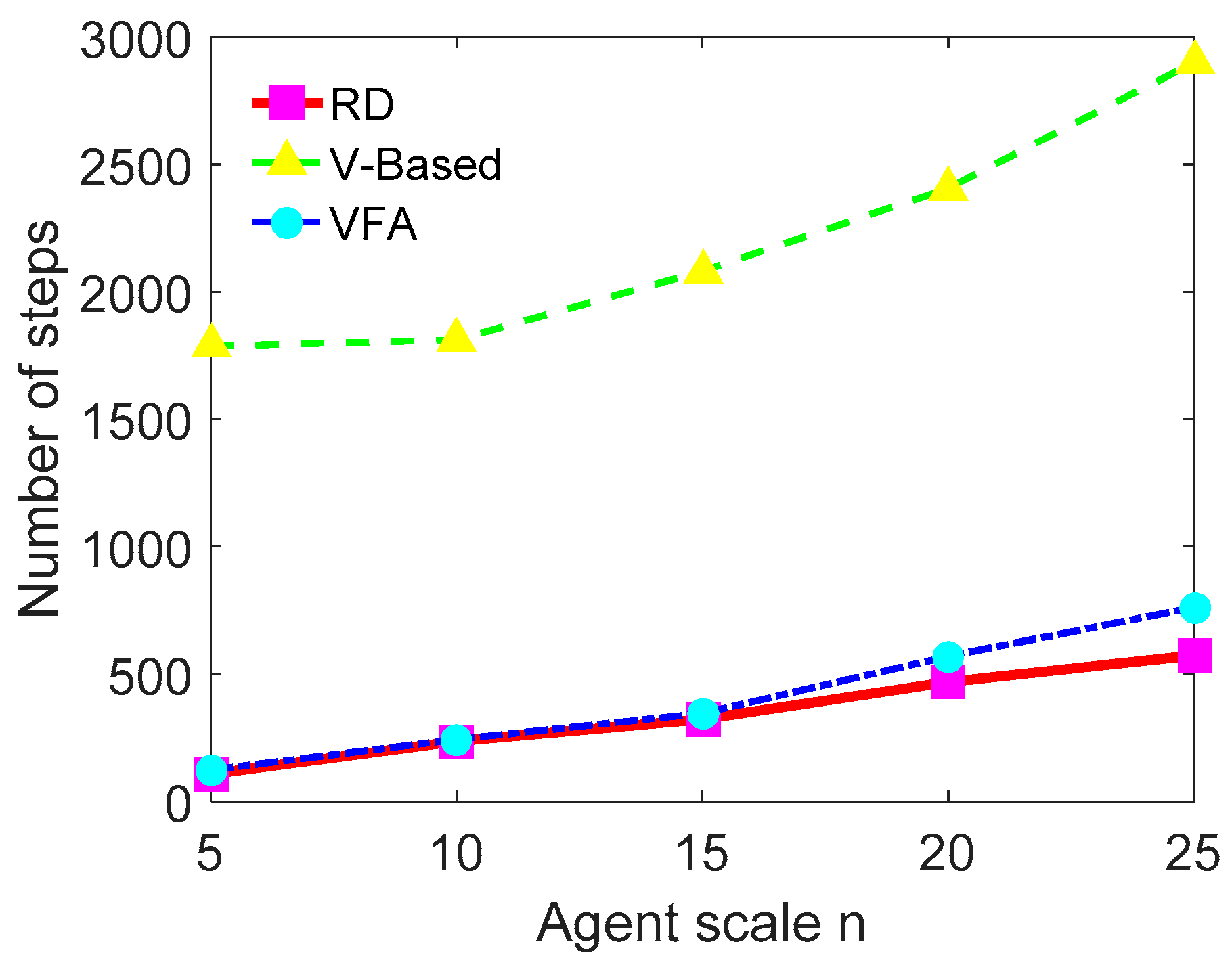
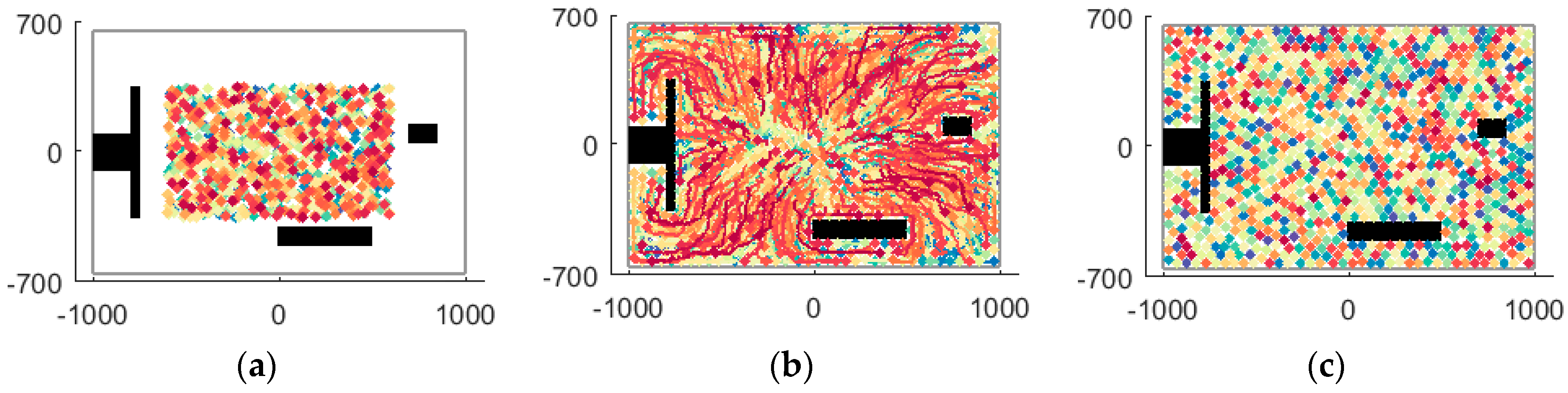
5. Simulation and Results
5.1. Small-Scale
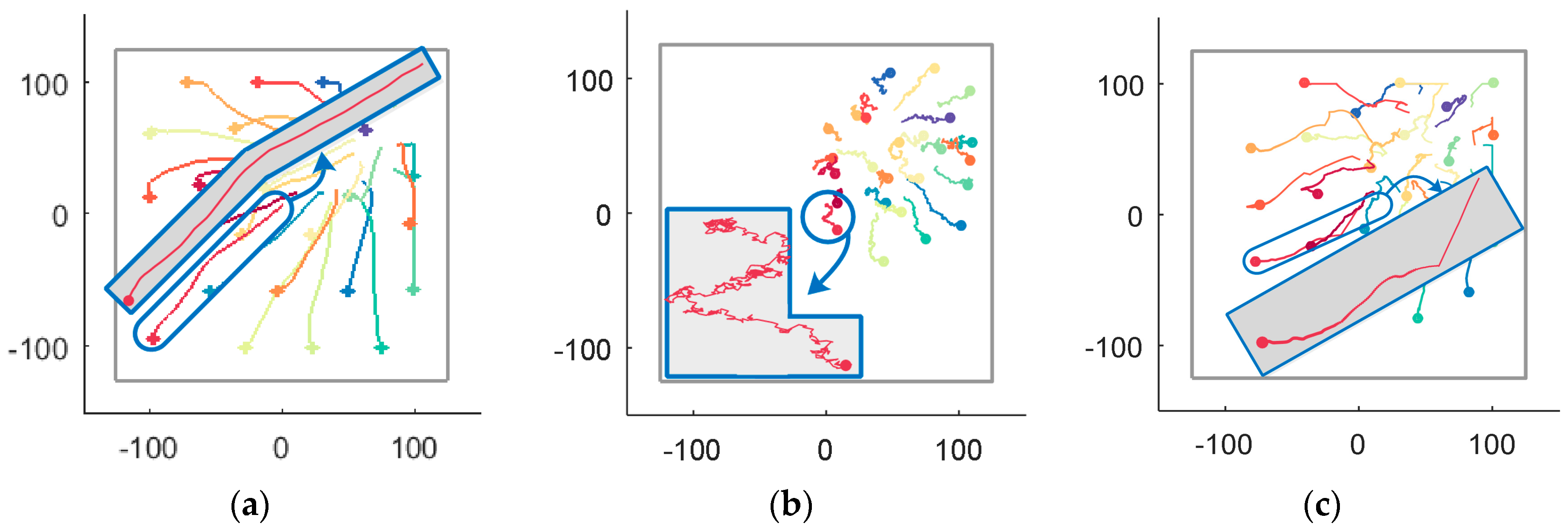
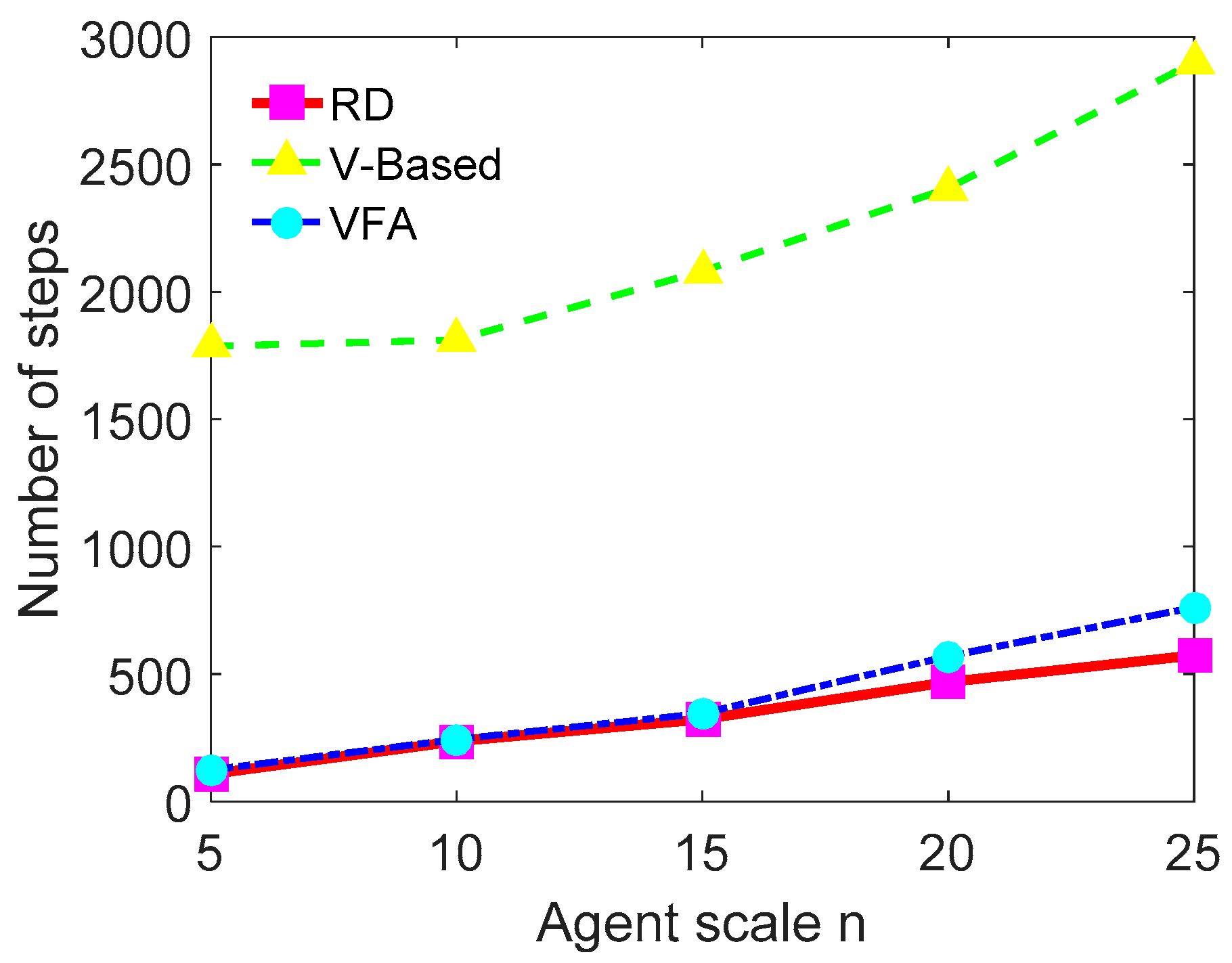
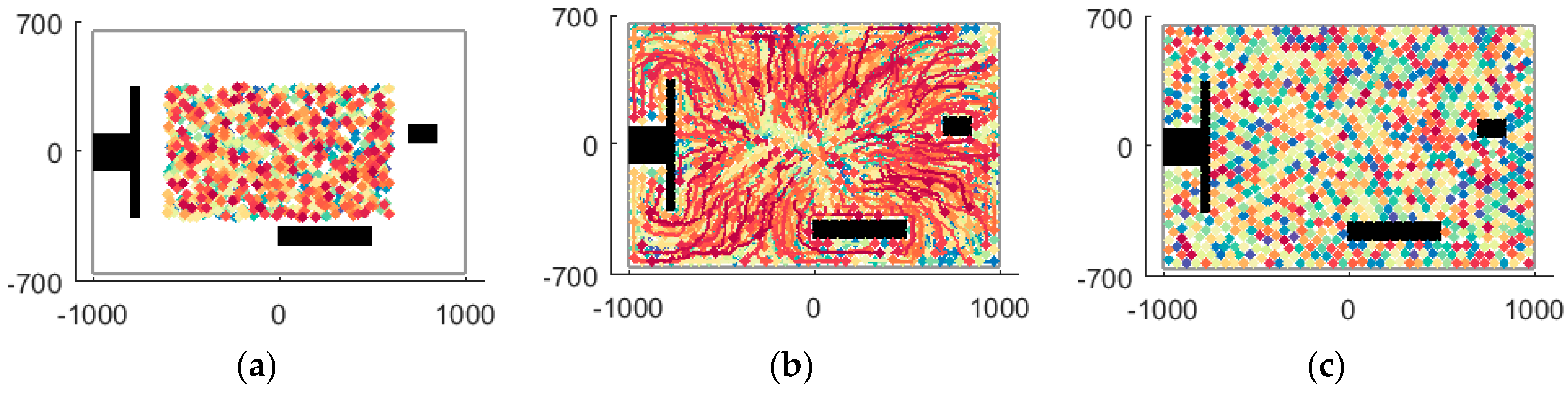
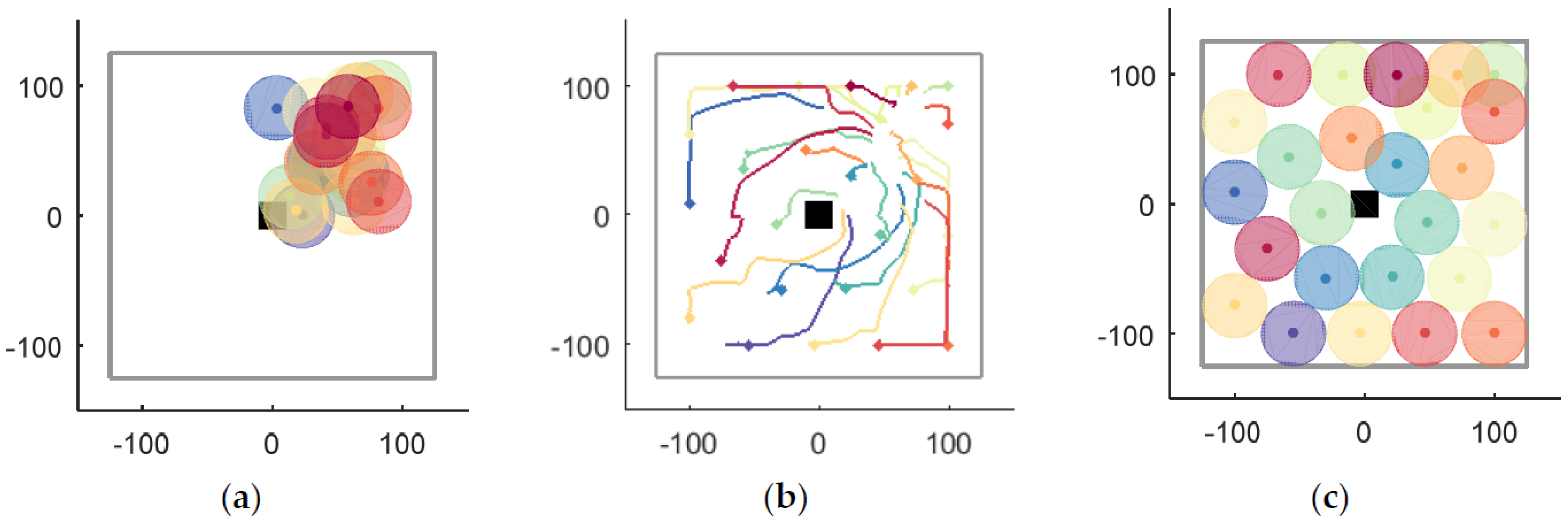
5.2. Large-Scale
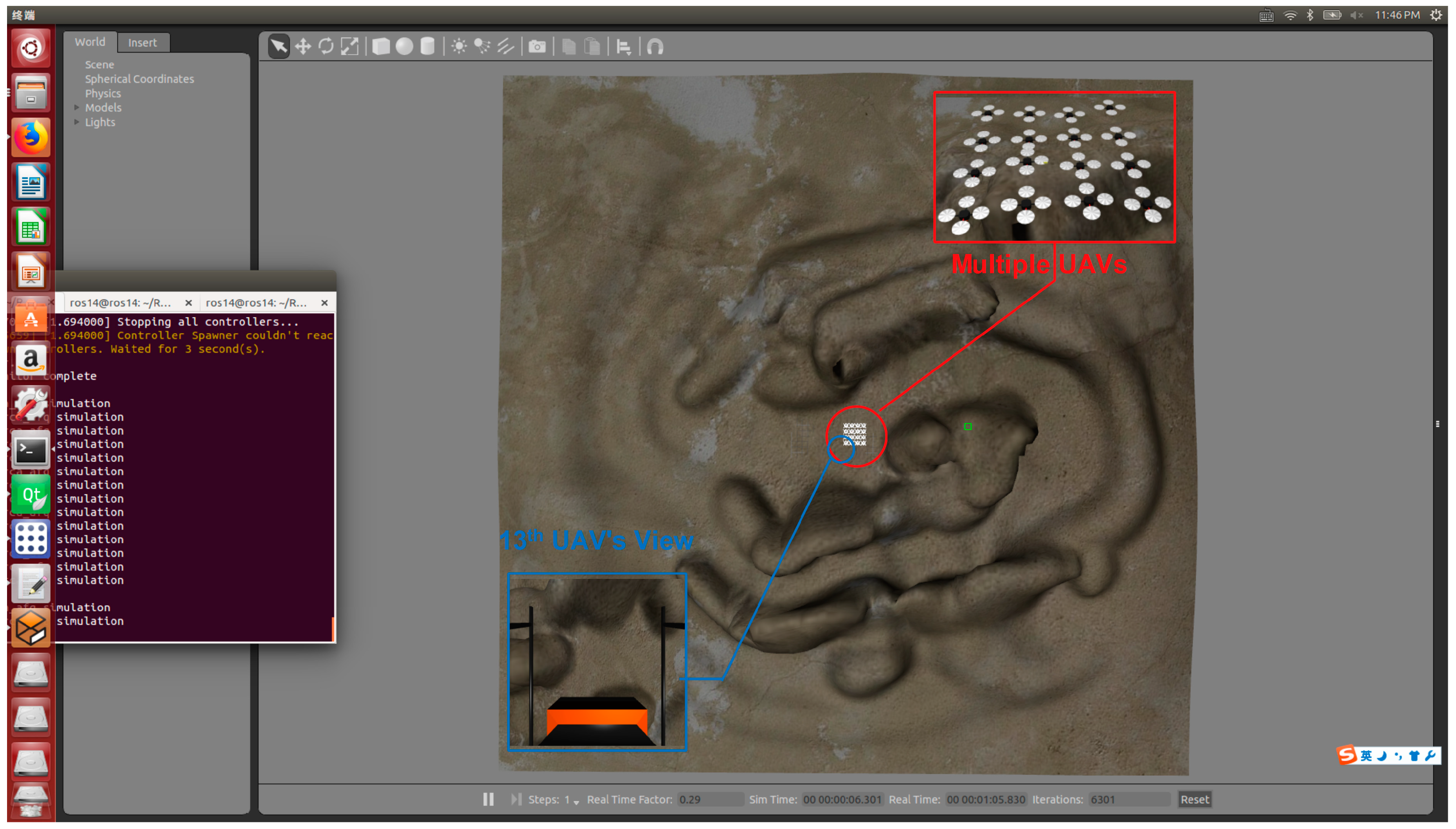
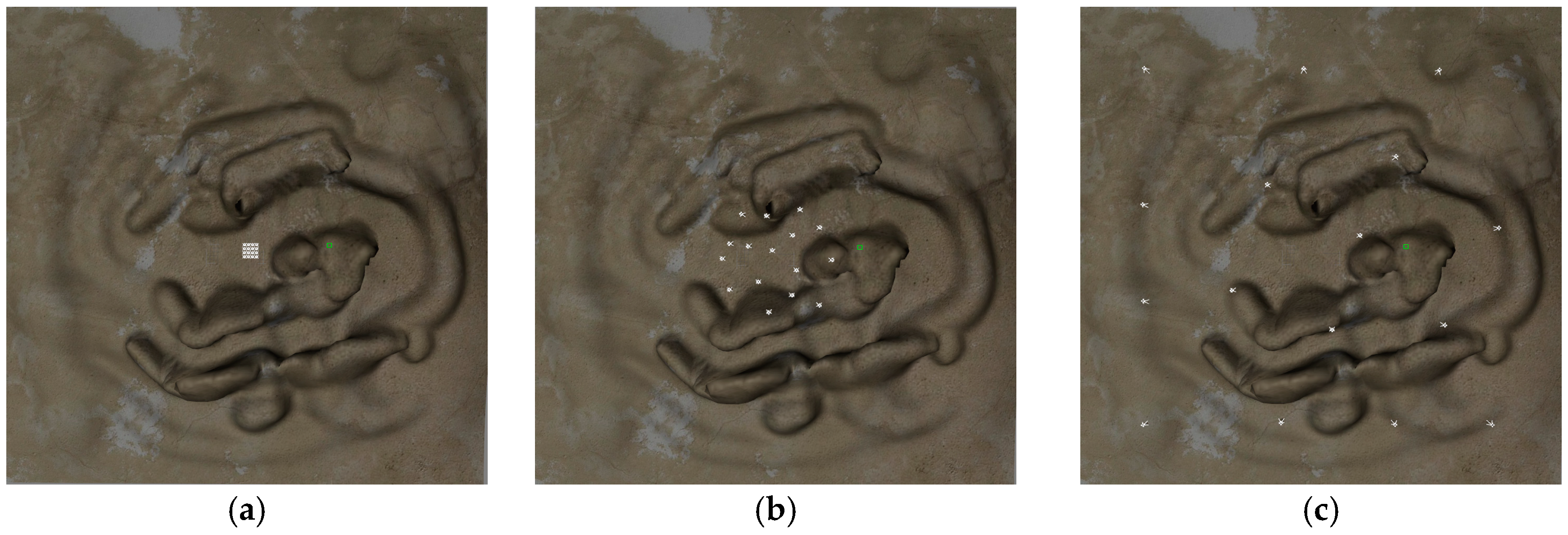
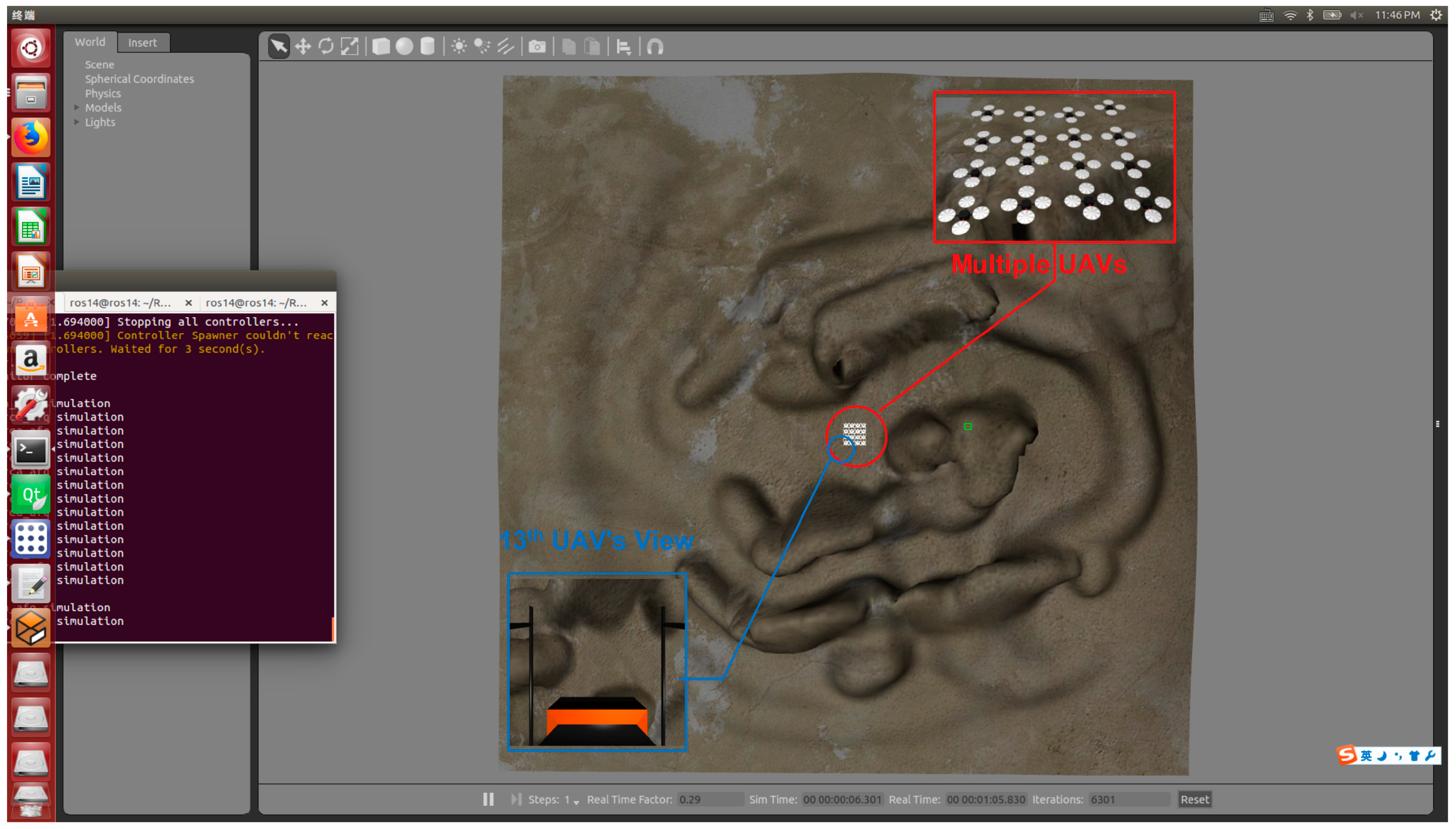
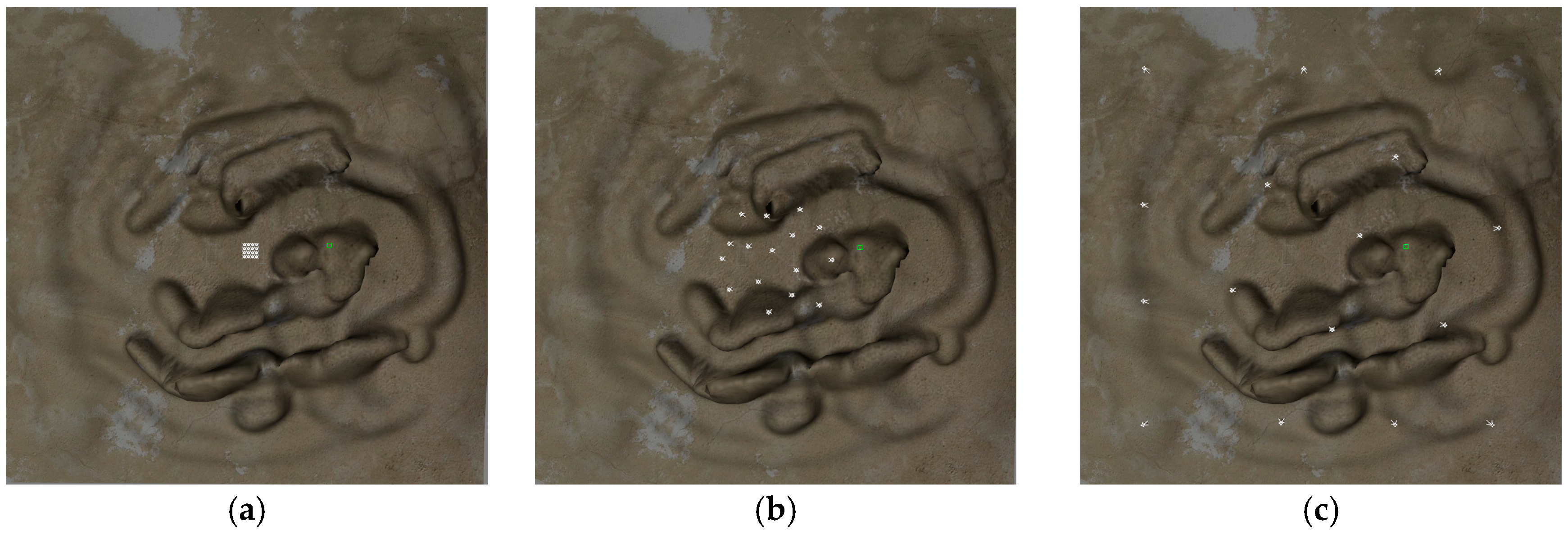
5.3. Robotic Operation System (ROS) Simulation
6. Conclusions and Future Work
Author Contributions
Conflicts of Interest
References
- Stergiopoulos, Y.; Tzes, A. Cooperative positioning/orientation control of mobile heterogeneous anisotropic sensor networks for area coverage. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 1106–1111. [Google Scholar]
- Stergiopoulos, Y.; Tzes, A. Autonomous deployment of heterogeneous mobile agents with arbitrarily anisotropic sensing patterns. In Proceedings of the 2012 20th Mediterranean Conference on Control & Automation (MED), Barcelona, Spain, 3–6 July 2012; pp. 1585–1590. [Google Scholar]
- Soltero, D.E.; Schwager, M.; Rus, D. Decentralized path planning for coverage tasks using gradient descent adaptive control. Int. J. Rob. Res. 2014, 33, 401–425. [Google Scholar] [CrossRef]
- Lambrou, T.P.; Panayiotou, C.G. Collaborative path planning for event search and exploration in mixed sensor networks. Int. J. Rob. Res. 2013, 32, 1424–1437. [Google Scholar] [CrossRef]
- Varga, M.; Basiri, M.; Heitz, G.; Floreano, D. Distributed formation control of fixed wing micro aerial vehicles for area coverage. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 669–674. [Google Scholar]
- Huang, W.H. Optimal line-sweep-based decompositions for coverage algorithms. In Proceedings of the 2001 ICRA IEEE International Conference on Robotics and Automation (Cat. No. 01CH37164), Seoul, Korea, 21–26 May 2001; pp. 27–32. [Google Scholar]
- Gonzilez, E.; Alarcon, M.; Aristiziibal, P.; Parra, C. BSA : A Coverage Algorithm. In Proceedings of the 2005 IEEE International Conference on Robotics and Automation (ICRA 2005), Barcelona, Spain, 18–22 April 2005; pp. 1679–1684. [Google Scholar]
- Acar, E.U.; Choset, H.; Rizzi, A.A.; Atkar, P.N.; Hull, D. Morse Decompositions for Coverage Tasks. Int. J. Robot. Res. 2002, 21, 331–344. [Google Scholar] [CrossRef]
- Choset, H.; Pignon, P. Coverage Path Planning : The Boustrophedon Cellular Decomposition. Auton. Robots 1997, 9, 247–253. [Google Scholar] [CrossRef]
- Gabriely, Y.; Rimon, E. Spiral-STC: An on-line coverage algorithm of grid environments by a mobile robot. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA′02), Washington, DC, USA, 11–15 May 2002; pp. 954–960. [Google Scholar]
- Balampanis, F.; Maza, I.; Ollero, A. Coastal Areas Division and Coverage with Multiple UAVs for Remote Sensing. Sensors 2017, 17, 808. [Google Scholar] [CrossRef] [PubMed]
- Avellar, G.S.C.; Pereira, G.A.S.; Pimenta, L.C.A.; Iscold, P. Multi-UAV routing for area coverage and remote sensing with minimum time. Sensors 2015, 15, 27783–27803. [Google Scholar] [CrossRef] [PubMed]
- Chan, S.K.; New, A.P.; Rekleitis, I. Distributed coverage with multi-robot system. In Proceedings of the 2006 IEEE International Conference on Robotics and Automation (ICRA 2006), Orlando, FL, USA, 15–19 May 2006; pp. 2423–2429. [Google Scholar]
- Rekleitis, I.; Lee-Shue, V.; New, A.P.; Choset, H. Limited communication, multi-robot team based coverage. In Proceedings of the 2004 IEEE International Conference on Robotics and Automation, New Orleans, LA, USA, 26 April–1 May 2004; pp. 3462–3468. [Google Scholar]
- Sharma, S.; Shukla, A.; Tiwari, R. Multi robot area exploration using nature inspired algorithm. Biol. Inspired Cogn. Archit. 2016, 18, 80–94. [Google Scholar] [CrossRef]
- Sebestyénová, J.; Kurdel, P. Self-organizing robotic system for area coverage and surround of contamination found. In Proceedings of the 2013 IEEE 9th International Conference on Computational Cybernetics (ICCC), Tihany, Hungary, 8–10 July 2013; pp. 309–314. [Google Scholar]
- Yang, B.; Ding, Y.; Hao, K. Area coverage searching for swarm robots using dynamic Voronoi-based method. In Proceedings of the 2015 34th Chinese Control Conference (CCC), Hangzhou, China, 28–30 July 2015; pp. 6090–6094. [Google Scholar]
- Rekleitis, I.; New, A.P.; Rankin, E.S.; Choset, H. Efficient boustrophedon multi-robot coverage: An algorithmic approach. Ann. Math. Artif. Intell. 2008, 52, 109–142. [Google Scholar] [CrossRef]
- Fazli, P.; Davoodi, A.; Pasquier, P.; Mackworth, A.K. Complete and robust cooperative robot area coverage with limited range. In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Taipei, Taiwan, 18–22 October 2010; pp. 5577–5582. [Google Scholar]
- Stergiopoulos, Y.; Tzes, A. Decentralized swarm coordination: A combined coverage/connectivity approach. J. Intell. Robot. Syst. Theory Appl. 2011, 64, 603–623. [Google Scholar] [CrossRef]
- Thanou, M.; Stergiopoulos, Y.; Tzes, A. Distributed coverage using geodesic metric for non-convex environments. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation (ICRA), Karlsruhe, Germany, 6–10 May 2013; pp. 933–938. [Google Scholar]
- Abbasi, F.; Mesbahi, A.; Mohammadpour, J. Team-Based Coverage Control of Moving Sensor Networks. In Proceedings of the American Control Conference (ACC), Boston, MA, USA, 6–8 July 2016; pp. 5691–5696. [Google Scholar]
- Stergiopoulos, Y.; Tzes, A. Coordination of Mobile Networks for Arbitrary Sensing Patterns. In Proceedings of the IASTED International Conference on Control Applications, Crete, Greece, 18–20 June 2012; pp. 256–262. [Google Scholar]
- Howard, A.; Mataric, M.J.; Sukhatme, G.S. Mobile sensor network deployment using potential fields: A distributed, scalable solution to the area coverage problem. In Distributed Autonomous Robotic Systems 5; Springer: Tokyo, Japan, 2002; Volume 5, pp. 299–308. [Google Scholar]
- Yang, S.X.; Luo, C. A Neural Network Approach to Complete Coverage Path Planning. IEEE Trans. Syst. Man Cybern. Part B Cybern. 2004, 34, 718–725. [Google Scholar] [CrossRef]
- Luo, C.; Yang, S.X.; Li, X.; Meng, M.Q.-H. Neural-Dynamics-Driven Complete Area Coverage Navigation through Cooperation of Multiple Mobile Robots. IEEE Trans. Ind. Electron. 2017, 64, 750–760. [Google Scholar] [CrossRef]
- Saha, D.; Computing, A.; Unit, M.; Das, A. Coverage Area Maximization by Heterogeneous Sensor Nodes with Minimum Displacement in Mobile Networks. In Proceedings of the 2015 IEEE International Conference on Advanced Networks and Telecommuncations Systems (ANTS), Kolkata, India, 15–18 December 2015; pp. 1–6. [Google Scholar]
- Sugimoto, C.; Natsu, S. Self-Organizing Node Deployment Based on Virtual Spring Mesh for Mobile Wireless Sensor Network. In Proceedings of the 2014 IEEE Wireless Communications and Networking Conference (WCNC), Istanbul, Turkey, 6–9 April 2014. [Google Scholar]
- Casteigts, A.; Albert, J.; Chaumette, S.; Nayak, A.; Stojmenovic, I. Biconnecting a Network of Mobile Robots Using Virtual Angular Forces. In Proceedings of the 2010 IEEE 72nd Vehicular Technology Conference Fall (VTC 2010-Fall), Ottawa, ON, Canada, 6–9 September 2010; pp. 1038–1046. [Google Scholar]
- Yu, X.; Liu, N.; Qian, X.; Zhang, T. A deployment method based on spring force in wireless robot sensor networks. Int. J. Adv. Robot. Syst. 2014, 11, 1–11. [Google Scholar] [CrossRef]
- Hadwiger, H. Minkowskische Addition und Subtraktion beliebiger Punktmengen und die Theoreme von Erhard Schmidt. Math. Z. 1950, 53, 210–218. [Google Scholar] [CrossRef]
- Deiser, O. On the Development of the Notion of a Cardinal Number. Hist. Philos. Log. 2010, 31, 123–143. [Google Scholar] [CrossRef]
- De Berg, M.; Cheong, O.; van Kreveld, M.; Overmars, M. Computational Geometry; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Van den Berg, J.; Guy, S.J.; Lin, M.; Manocha, D. Reciprocal n-Body Collision Avoidance. In Springer Tracts in Advanced Robotics; Springer: Berlin/Heidelberg, Germany, 2011; Volume 70, pp. 3–19. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description |
|---|---|
| The optimal velocity decision. | |
| The permitted region with unknown shape. | |
| Centered at , the length of edge is twice that of . | |
| Random velocity in the set of . | |
| The center of the set of in Euclidean Space. | |
| The velocity of | |
| NUM(S) | The number of point in the set of S. |
| Parameter | Value | Description |
|---|---|---|
| simulation step size | ||
| algorithm terminated value | ||
| , | , | length of square region , |
| , | , | number of UAVs |
| maximum velocity of UAVs | ||
| , , | , , | radius of UAVs’ shape, sensor and communication |
| , | , | maximum considered neighbor and distance |
| Method | Case 1 | Case 2 | Case 3 | Ave Time (ms) |
|---|---|---|---|---|
| RD | 10.857 | 20.280 | 13.266 | 14.807 |
| V-Based | 591.148 | 605.856 | 632.880 | 609.961 |
| VFA | 36.749 | 48.072 | 43.573 | 42.798 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, R.; Xu, N.; Li, J. A Self-Organized Reciprocal Decision Approach for Sensing Coverage with Multi-UAV Swarms. Sensors 2018, 18, 1864. https://doi.org/10.3390/s18061864
Chen R, Xu N, Li J. A Self-Organized Reciprocal Decision Approach for Sensing Coverage with Multi-UAV Swarms. Sensors. 2018; 18(6):1864. https://doi.org/10.3390/s18061864
Chicago/Turabian StyleChen, Runfeng, Ning Xu, and Jie Li. 2018. "A Self-Organized Reciprocal Decision Approach for Sensing Coverage with Multi-UAV Swarms" Sensors 18, no. 6: 1864. https://doi.org/10.3390/s18061864
APA StyleChen, R., Xu, N., & Li, J. (2018). A Self-Organized Reciprocal Decision Approach for Sensing Coverage with Multi-UAV Swarms. Sensors, 18(6), 1864. https://doi.org/10.3390/s18061864