Reader Architectures for Wireless Surface Acoustic Wave Sensors


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
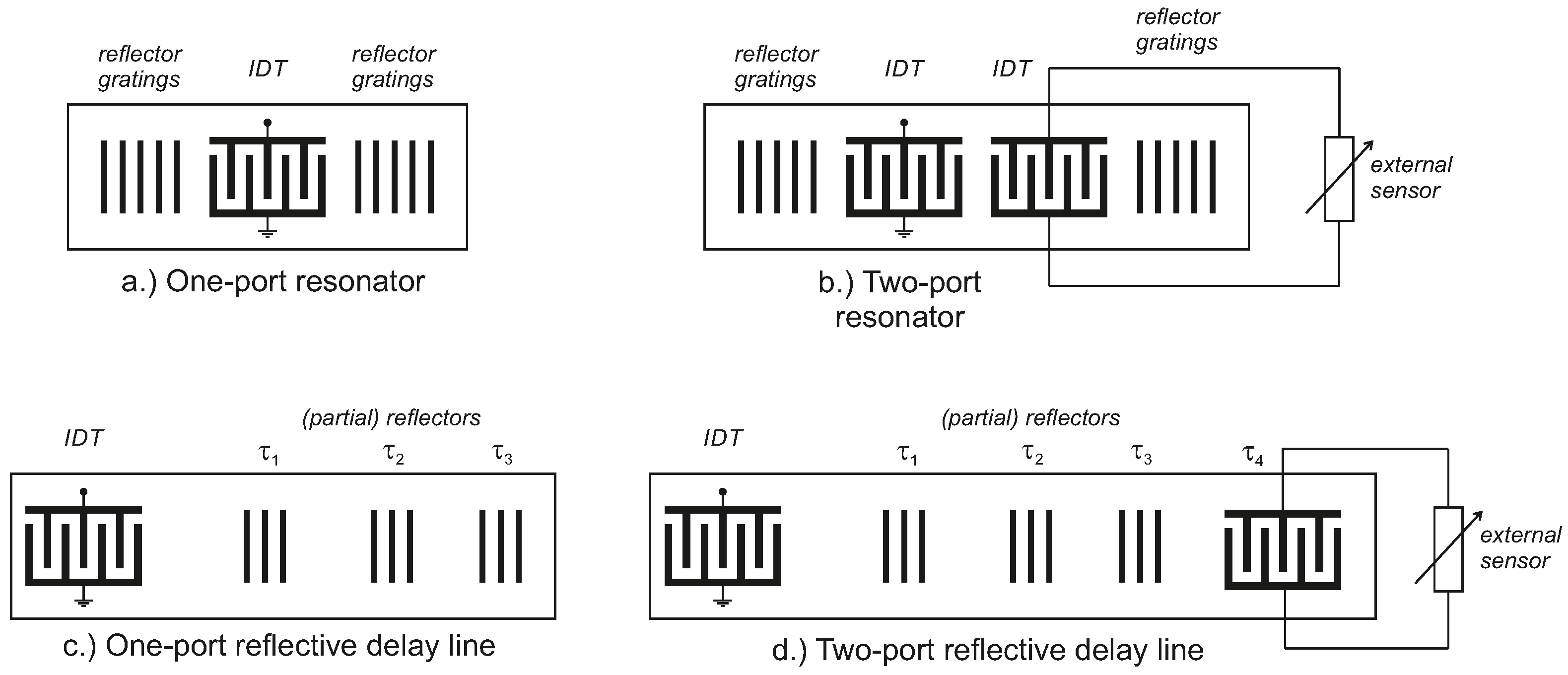
2. Fundamental Concept of Passive SAW Sensors
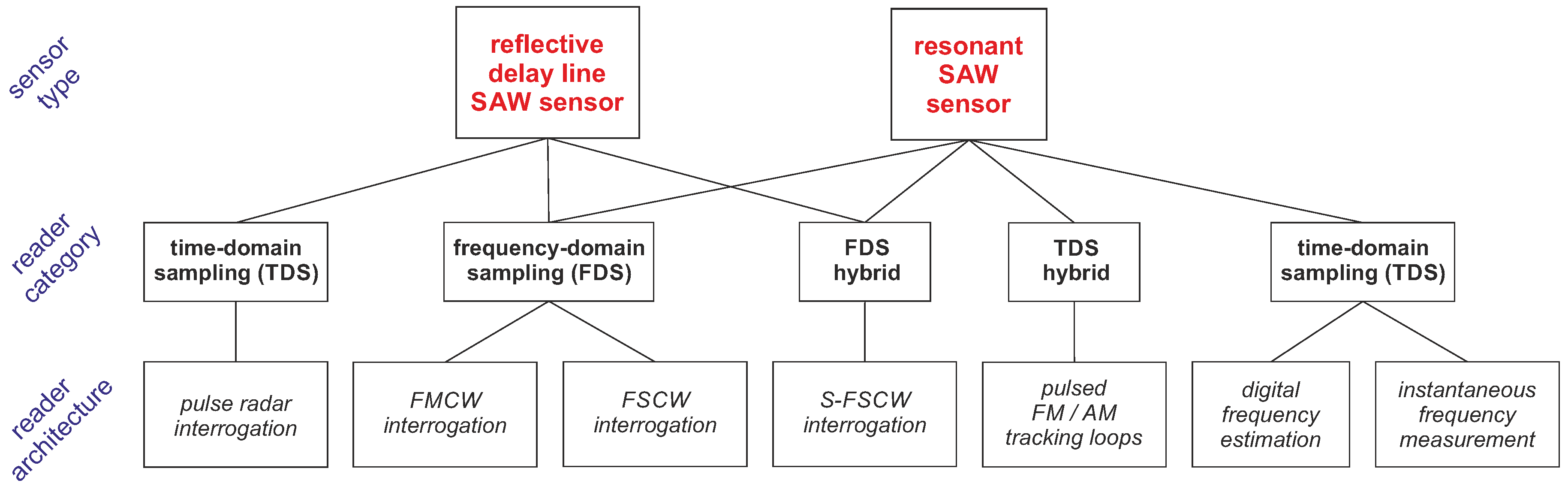
3. SAW Reader Architecture Classification
4. Frequency Domain Sampling and FDS Hybrid Concepts
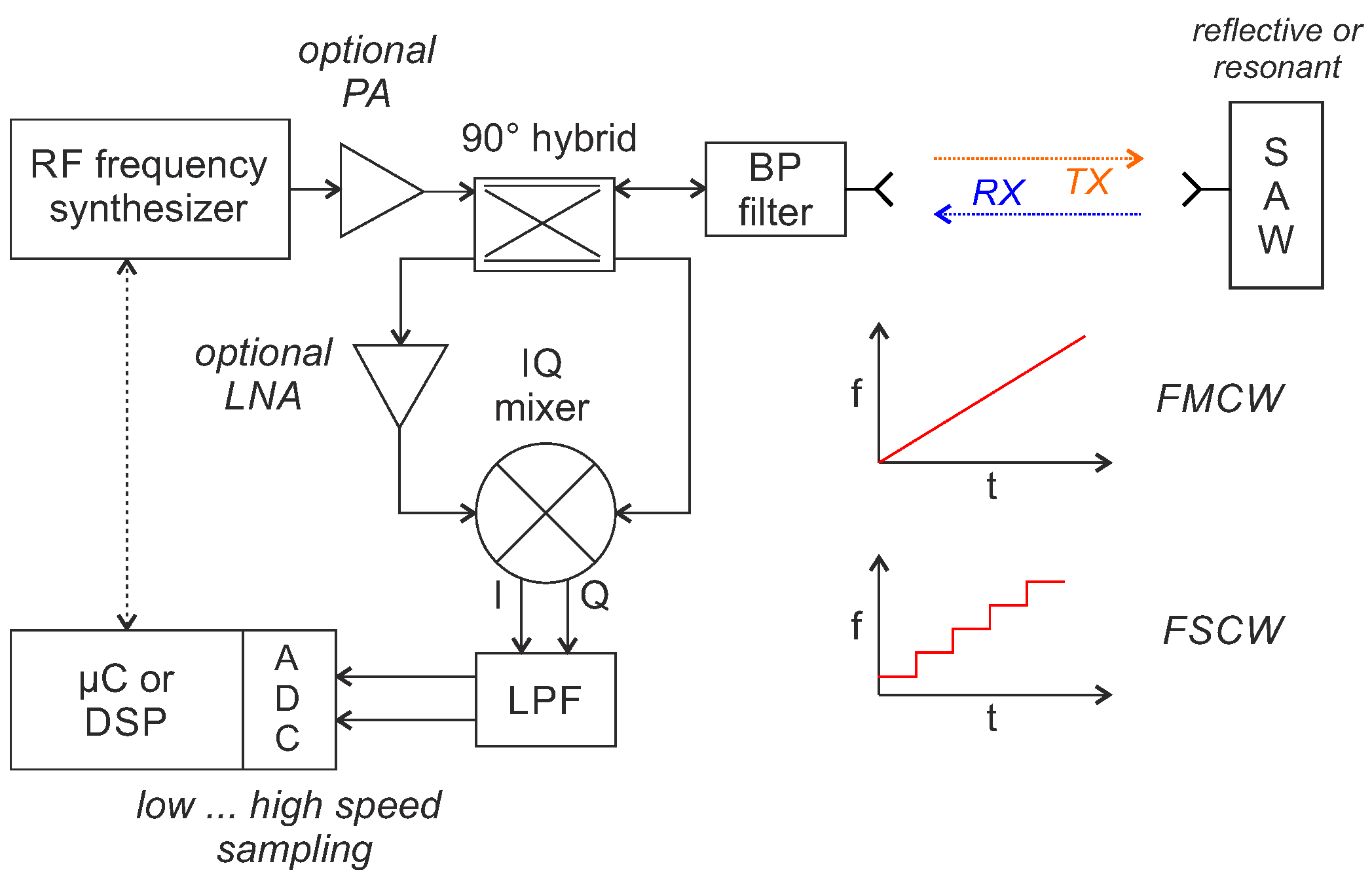
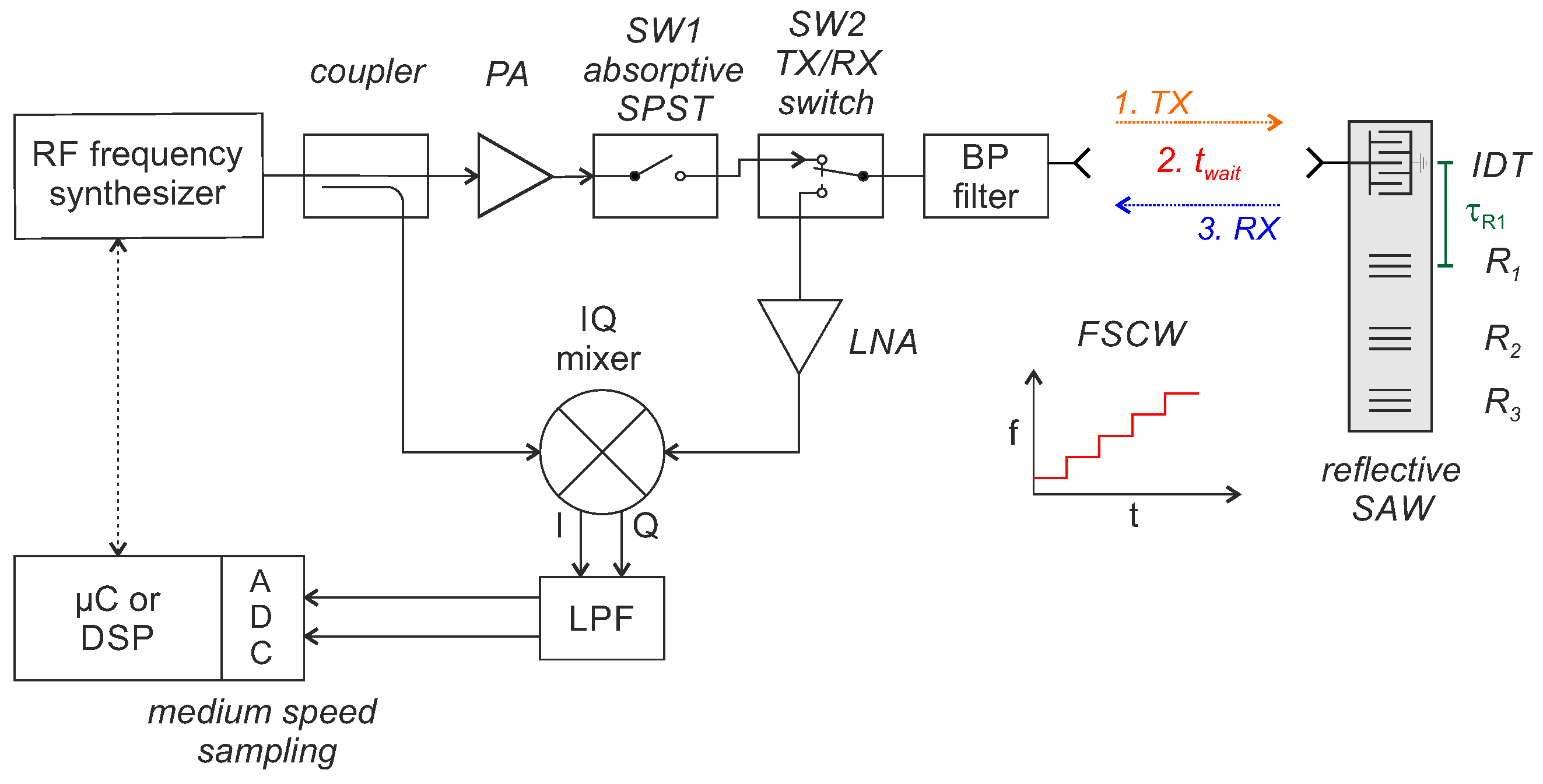
4.1. Frequency Domain Sampling with FSCW/FSCW Interrogation
4.1.1. Basic Operation Priciple
4.1.2. Signal Model
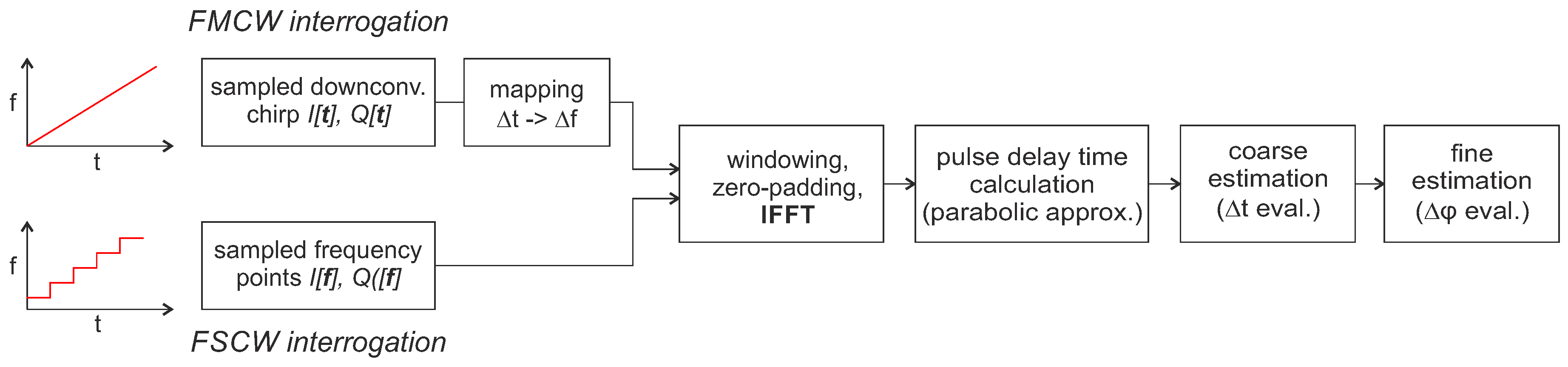
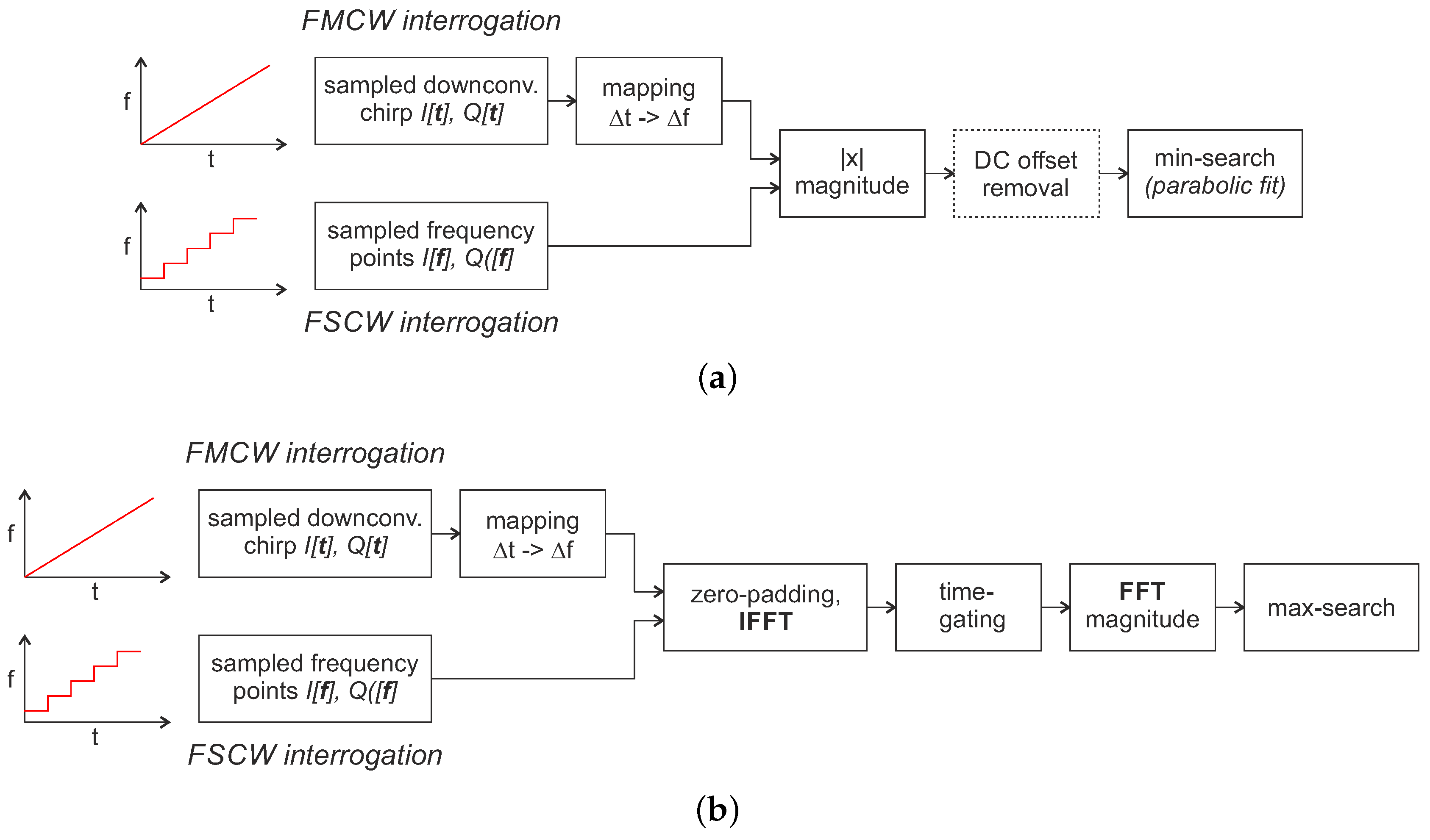
4.1.3. Signal Processing for Reflective Delay Line Sensors
4.1.4. Signal Processing for Resonant SAW Sensors
4.2. Frequency Domain Sampling with S-FSCW Interrogation
4.3. State of the Art and Discussion for Frequency Domain Sampling and FDS Hybrids
5. Time Domain Sampling and TDS Hybrid Concepts
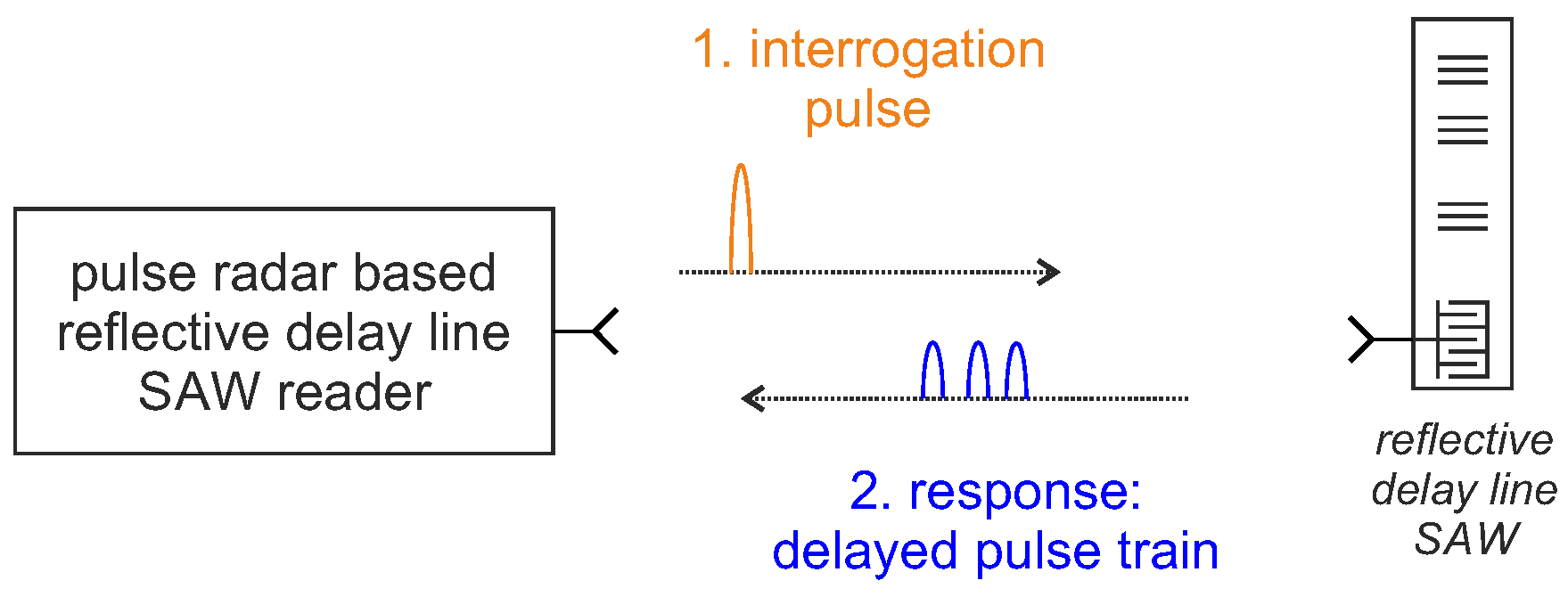
5.1. Time Domain Sampling for Reflective Delay Line Sensors: Pulse Radar Interrogation
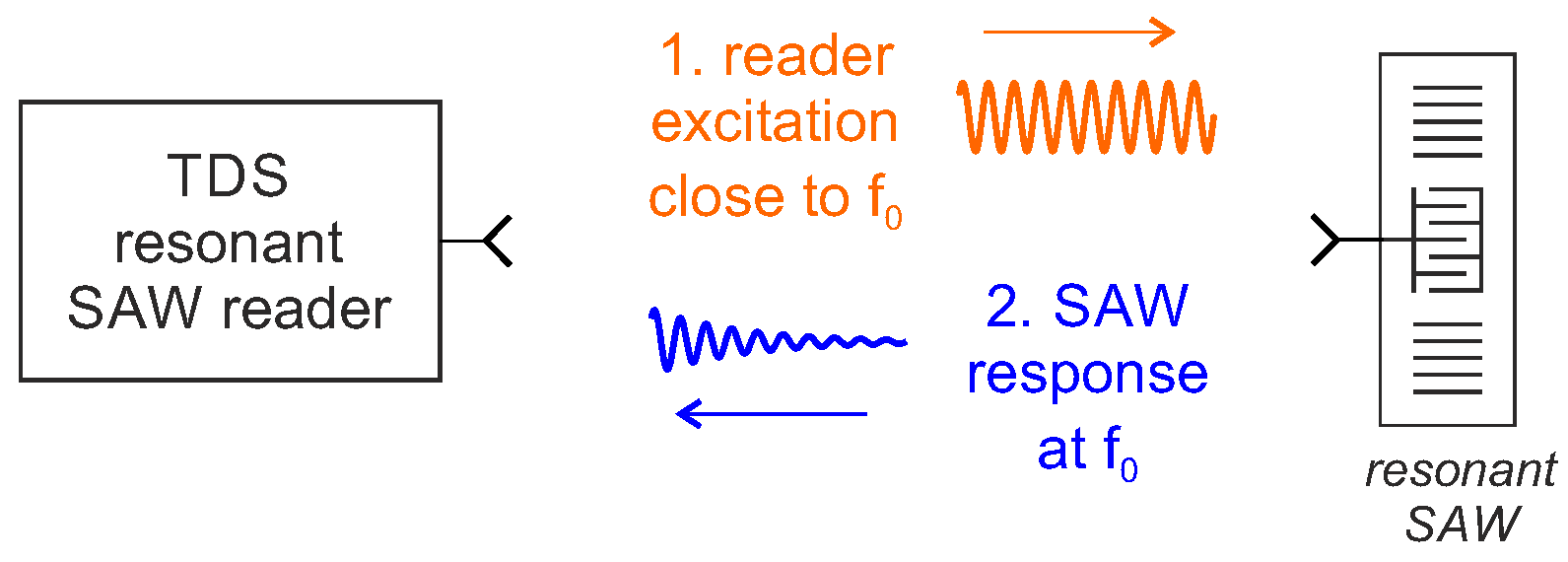
5.2. Time Domain Sampling for Resonant SAW Sensors
5.2.1. Digital Frequency Estimation (DFE)
5.2.2. Instantaneous Frequency Measurement (IFM)
5.2.3. Pulsed FM/AM Tracking Loops
5.2.3.1. Three-Point Interrogation Strategy
5.2.3.2. FM Interrogation Strategy
5.2.3.3. Two-Point Interrogation Strategy
5.3. State of the Art and Discussion for Time Domain Sampling and TDS Hybrids
6. Overall Comparison and Discussion
7. Conclusions
Acknowledgments
Conflicts of Interest
References
- Dias, J.; Karrer, H. Stress effects in acoustic surface-wave circuits and applications to pressure and force transducers. In Proceedings of the 1974 IEEE International Solid-State Circuits Conference, Philadelphia, PA, USA, 13–15 February 1974; pp. 166–167. [Google Scholar] [CrossRef]
- Reeder, T.M.; Cullen, D.E.; Gilden, M. SAW Oscillator Pressure Sensors. In Proceedings of the 1975 Ultrasonics Symposium, Los Angeles, CA, USA, 22–24 September 1975; pp. 264–268. [Google Scholar] [CrossRef]
- Reeder, T.M.; Cullen, D.E. Surface-acoustic-wave pressure and temperature sensors. Proc. IEEE 1976, 64, 754–756. [Google Scholar] [CrossRef]
- Hauden, D.; Michel, M.; Gagnepain, J.J. Higher Order Temperature Coefficients of Quartz SAW Oscillators. In Proceedings of the 32nd Annual Symposium on Frequency Control, Atlantic City, NJ, USA, 31 May–2 June 1978; pp. 77–86. [Google Scholar] [CrossRef]
- Wolff, U.; Dickert, F.L.; Fischerauer, G.K.; Greibl, W.; Ruppel, C.C.W. SAW sensors for harsh environments. IEEE Sens. J. 2001, 1, 4–13. [Google Scholar] [CrossRef]
- Buff, W. SAW sensors. Sens. Actuators A Phys. 1992, 30, 117–121. [Google Scholar] [CrossRef]
- Seifert, F.; Bulst, W.E.; Ruppel, C. Mechanical sensors based on surface acoustic waves. Sens. Actuators A Phys. 1994, 44, 231–239. [Google Scholar] [CrossRef]
- Reindl, L.; Ostertag, T.; Ruile, W.; Ruppel, C.C.W.; Lauper, A.; Bachtiger, R.; Ernst, H. Hybrid SAW-device for a European train control system. In Proceedings of the 1994 IEEE Ultrasonics Symposium, Cannes, France, 31 October–3 November 1994; pp. 175–179. [Google Scholar]
- Scherr, H.; Scholl, G.; Seifert, F.; Weigel, R. Quartz pressure sensor based on SAW reflective delay line. In Proceedings of the 1996 IEEE Ultrasonics Symposium, San Antonio, TX, USA, 3–6 November 1996; pp. 347–350. [Google Scholar] [CrossRef]
- Scholl, G.; Schmidt, F.; Ostertag, T.; Reindl, L.; Scherr, H.; Wolff, U. Wireless passive SAW sensor systems for industrial and domestic applications. In Proceedings of the 1998 IEEE International Frequency Control Symposium (Cat. No.98CH36165), Pasadena, CA, USA, 29 May 1998; pp. 595–601. [Google Scholar] [CrossRef]
- Pohl, A.; Seifert, F. Wirelessly interrogable surface acoustic wave sensors for vehicular applications. IEEE Trans. Instrum. Meas. 1997, 46, 1031–1038. [Google Scholar] [CrossRef]
- Hinrichsen, V.; Scholl, G.; Schubert, M.; Ostertag, T. Online monitoring of high-voltage metal-oxide surge arresters by wireless passive surface acoustic wave (SAW) temperature sensors. In Proceedings of the 1999 Eleventh International Symposium on High Voltage Engineering, London, UK, 23–27 August 1999; pp. 238–241. [Google Scholar] [CrossRef]
- Reindl, L.M.; Pohl, A.; Scholl, G.; Weigel, R. SAW-based radio sensor systems. IEEE Sens. J. 2001, 1, 69–78. [Google Scholar] [CrossRef]
- Weigel, R.; Morgan, D.P.; Owens, J.M.; Ballato, A.; Lakin, K.M.; Hashimoto, K.; Ruppel, C.C.W. Microwave acoustic materials, devices, and applications. IEEE Trans. Microw. Theory Tech. 2002, 50, 738–749. [Google Scholar] [CrossRef]
- Scholl, G.; Korden, C.; Riha, E.; Ruppel, C.C.W.; Wolff, U.; Riha, G.; Reindl, L.; Weigel, R. SAW-based radio sensor systems for short-range applications. IEEE Microw. Mag. 2003, 4, 68–76. [Google Scholar] [CrossRef]
- Reindl, L.M.; Shrena, I.M. Wireless measurement of temperature using surface acoustic waves sensors. IEEE Trans. Ultrason. Ferroelectri. Freq. Control 2004, 51, 1457–1463. [Google Scholar] [CrossRef]
- Lamothe, M.; Plessky, V.; Friedt, J.M.; Ostertag, T.; Ballandras, S. Ultra-wideband SAW sensors and tags. Electron. Lett. 2013, 49, 1576–1577. [Google Scholar] [CrossRef]
- Wang, W.; Xue, X.; Huang, Y.; Liu, X. A Novel Wireless and Temperature-Compensated SAW Vibration Sensor. Sensors 2014, 14, 20702–20712. [Google Scholar] [CrossRef] [PubMed]
- Li, B.; Yassine, O.; Kosel, J. A Surface Acoustic Wave Passive and Wireless Sensor for Magnetic Fields, Temperature, and Humidity. IEEE Sens. J. 2015, 15, 453–462. [Google Scholar] [CrossRef]
- Devkota, J.; Ohodnicki, P.R.; Greve, D.W. SAW Sensors for Chemical Vapors and Gases. Sensors 2017, 17, 801. [Google Scholar] [CrossRef] [PubMed]
- Ruppel, C.C.W. Acoustic Wave Filter Technology—A Review. IEEE Trans. Ultrason. Ferroelectri. Freq. Control 2017, 64, 1390–1400. [Google Scholar] [CrossRef] [PubMed]
- White, R.M.; Voltmer, F.W. Direct piezoelectric coupling to surface elastic waves. Appl. Phys. Lett. 1965, 7, 314–316. [Google Scholar] [CrossRef]
- Pohl, A. A review of wireless SAW sensors. IEEE Trans. Ultrason. Ferroelectri. Freq. Control 2000, 47, 317–332. [Google Scholar] [CrossRef] [PubMed]
- Reindl, L.; Ruppel, C.C.W.; Kirmayr, A.; Stockhausen, N.; Hilhorst, M.A.; Balendonck, J. Radio-requestable passive SAW water-content sensor. IEEE Trans. Microw. Theory Tech. 2001, 49, 803–808. [Google Scholar] [CrossRef]
- Cole, P.; Vaughn, R. Electronic Surveillance System. US Patent 3,707,711, 26 December 1972. [Google Scholar]
- Plessky, V.P.; Reindl, L.M. Review on SAW RFID tags. IEEE Trans. Ultrason. Ferroelectri. Freq. Control 2010, 57, 654–668. [Google Scholar] [CrossRef] [PubMed]
- Hagelauer, A.; Ussmueller, T.; Weigel, R. SAW and CMOS RFID transponder-based wireless systems and their applications. In Proceedings of the 2012 IEEE International Frequency Control Symposium, Baltimore, MD, USA, 21–24 May 2012; pp. 1–6. [Google Scholar] [CrossRef]
- Bao, X.Q.; Burkhard, W.; Varadan, V.V.; Varadan, V.K. SAW Temperature Sensor and Remote Reading System. In Proceedings of the IEEE 1987 Ultrasonics Symposium, Denver, Colorado, USA, 14–16 October 1987; pp. 583–586. [Google Scholar] [CrossRef]
- Schmidt, F.; Sczesny, O.; Reindl, L.; Magori, V. Remote sensing of physical parameters by means of passive surface acoustic wave devices (“ID-TAG”). In Proceedings of the 1994 Proceedings of IEEE Ultrasonics Symposium, Cannes, France, 31 October–3 November 1994; pp. 589–592. [Google Scholar] [CrossRef]
- Kuypers, J.H.; Tanaka, S.; Esashi, M.; Eisele, D.A.; Reindl, L.M. P1I-9 Passive 2. In 45 GHz TDMA based Multi-Sensor Wireless Temperature Monitoring System: Results and Design Considerations. In Proceedings of the 2006 IEEE Ultrasonics Symposium, Vancouver, BC, Canada, 2–6 October 2006; pp. 1453–1458. [Google Scholar] [CrossRef]
- Pohl, A.; Ostermayer, G.; Reindl, L.; Seifert, F. Spread spectrum techniques for wirelessly interrogable passive SAW sensors. In Proceedings of the IEEE 4th International Symposium on Spread Spectrum Techniques and Applications, Mainz, Germany, 25 September 1996; pp. 730–734. [Google Scholar] [CrossRef]
- Ostermayer, G. Correlative signal processing in wireless SAW sensor applications to provide multiple-access capability. IEEE Trans. Microw. Theory Tech. 2001, 49, 809–816. [Google Scholar] [CrossRef]
- Dudzik, E.; Abedi, A.; Hummels, D.; Cunha, M.P.D. Wireless multiple access surface acoustic wave coded sensor system. Electron. Lett. 2008, 44, 775–776. [Google Scholar] [CrossRef]
- Malocha, D.C.; Puccio, D.; Gallagher, D. Orthogonal frequency coding for SAW device applications. In Proceedings of the IEEE Ultrasonics Symposium, Montreal, QC, Canada, 23–27 August 2004; pp. 1082–1085. [Google Scholar] [CrossRef]
- Steindl, R.; Pohl, A.; Seifert, F. Impedance loaded SAW sensors offer a wide range of measurement opportunities. IEEE Trans. Microw. Theory Tech. 1999, 47, 2625–2629. [Google Scholar] [CrossRef]
- Schimetta, G.; Dollinger, F.; Weigel, R. A wireless pressure-measurement system using a SAW hybrid sensor. IEEE Trans. Microw. Theory Tech. 2000, 48, 2730–2735. [Google Scholar] [CrossRef]
- Kalinin, V.; Bown, G.; Beckley, J.; Lohr, R. Pulsed interrogation of the SAW torque sensor for electrical power assisted steering. In Proceedings of the IEEE Ultrasonics Symposium, Montreal, QC, Canada, 23–27 August 2004; Volume 3, pp. 1577–1580. [Google Scholar] [CrossRef]
- Kalinin, V. Passive wireless strain and temperature sensors based on SAW devices. In Proceedings of the 2004 IEEE Radio and Wireless Conference (IEEE Cat. No.04TH8746), Atlanta, GA, USA, 22–27 September 2004; pp. 187–190. [Google Scholar] [CrossRef]
- Kalinin, V. Wireless physical SAW sensors for automotive applications. In Proceedings of the 2011 IEEE International Ultrasonics Symposium, Orlando, FL, USA, 18–21 October 2011; pp. 212–221. [Google Scholar] [CrossRef]
- Buff, W.; Rusko, M.; Vandahl, T.; Goroll, M.; Moller, F. A differential measurement SAW device for passive remote sensoring. In Proceedings of the 1996 IEEE Ultrasonics Symposium, San Antonio, TX, USA, 3–6 November 1996; pp. 343–346. [Google Scholar] [CrossRef]
- Buff, W.; Klett, S.; Rusko, M.; Ehrenpfordt, J.; Goroli, M. Passive remote sensing for temperature and pressure using SAW resonator devices. IEEE Trans. Ultrason. Ferroelectri. Freq. Control 1998, 45, 1388–1392. [Google Scholar] [CrossRef]
- Buff, W.; Rusko, M.; Goroll, E.; Ehrenpfordt, J.; Vandahl, T. Universal pressure and temperature SAW sensor for wireless applications. In Proceedings of the 1997 IEEE Ultrasonics Symposium Proceedings. An International Symposium (Cat. No.97CH36118), Toronto, ON, Canada, 5–8 October 1997; Volume 1, pp. 359–362. [Google Scholar] [CrossRef]
- Schuster, S.; Scheiblhofer, S.; Reindl, L.; Stelzer, A. Performance evaluation of algorithms for SAW-based temperature measurement. IEEE Trans. Ultrason. Ferroelectri. Freq. Control 2006, 53, 1177–1185. [Google Scholar] [CrossRef]
- Scheiblhofer, S.; Schuster, S.; Stelzer, A. Signal model and linearization for nonlinear chirps in FMCW Radar SAW-ID tag request. IEEE Trans. Microw. Theory Tech. 2006, 54, 1477–1483. [Google Scholar] [CrossRef]
- Pichler, M.; Stelzer, A.; Gulden, P.; Vossiek, M. Influence of Systematic Frequency-Sweep Non-Linearity on Object Distance Estimation in FMCW/FSCW Radar Systems. In Proceedings of the 2003 33rd European Microwave Conference, Munich, Germany, 2–10 October 2003; pp. 1203–1206. [Google Scholar] [CrossRef]
- Fuchs, J.; Ward, K.D.; Tulin, M.P.; York, R.A. Simple techniques to correct for VCO nonlinearities in short range FMCW radars. In Proceedings of the 1996 IEEE MTT-S International Microwave Symposium Digest, San Francisco, CA, USA, 17–21 June 1996; pp. 1175–1178. [Google Scholar] [CrossRef]
- Vossiek, M.; Heide, P.; Nalezinski, M.; Magori, V. Novel FMCW radar system concept with adaptive compensation of phase errors. In Proceedings of the 1996 26th European Microwave Conference, Prague, Czech Republic, 6–13 September 1996; pp. 135–139. [Google Scholar] [CrossRef]
- Pichler, M.; Stelzer, A.; Gulden, P.; Seisenberger, C.; Vossiek, M. Phase-Error Measurement and Compensation in PLL Frequency Synthesizers for FMCW Sensors—I: Context and Application. IEEE Trans. Circ. Syst. I 2007, 54, 1006–1017. [Google Scholar] [CrossRef]
- Stelzer, A.; Schuster, S.; Scheiblhofer, S. Readout unit for wireless SAW sensors and ID-tags. In Proceedings of the Second International Symposium on Acoustic Wave Devices for Future Mobile Communication Systems, Chiba, Japan, 2–5 March 2004; pp. 37–44. [Google Scholar]
- Scheiblhofer, S.; Schuster, S.; Stelzer, A. Modeling and performance analysis of SAW reader systems for delay-line sensors. IEEE Trans. Ultrason. Ferroelectri. Freq. Control 2009, 56, 2292–2303. [Google Scholar] [CrossRef] [PubMed]
- Reindl, L. Wireless Passive SAW Identification Marks and Sensors. In Proceedings of the 4th Caesarium on Functional Micro- and Nanosystems, Bonn, Germany, 16–18 June 2003; pp. 65–104. [Google Scholar] [CrossRef]
- Kuypers, J.H.; Reindl, L.M.; Tanaka, S.; Esashi, M. Maximum accuracy evaluation scheme for wireless saw delay-line sensors. IEEE Trans. Ultrason. Ferroelectri. Freq. Control 2008, 55, 1640–1652. [Google Scholar] [CrossRef] [PubMed]
- Zheng, Z.; Han, T.; Qin, P. Maximum Measurement Range and Accuracy of SAW Reflective Delay Line Sensors. Sensors 2015, 15, 26643–26653. [Google Scholar] [CrossRef] [PubMed]
- Reindl, L.; Scholl, G.; Ostertag, T.; Ruppel, C.C.W.; Bulst, W.E.; Seifert, F. SAW devices as wireless passive sensors. In Proceedings of the 1996 IEEE Ultrasonics Symposium, San Antonio, TX, USA, 3–6 November 1996; pp. 363–367. [Google Scholar] [CrossRef]
- Viikari, V.; Kokkonen, K.; Meltaus, J. Optimized signal processing for FMCW interrogated reflective delay line-type SAW sensors. IEEE Trans. Ultrason. Ferroelectri. Freq. Control 2008, 55, 2522–2526. [Google Scholar] [CrossRef] [PubMed]
- Shrena, I.; Eisele, D.; Bardong, J.; Mayer, E.; Reindl, L.M. High-precision signal processing algorithm to evaluate SAW properties as a function of temperature. IEEE IEEE Trans. Ultrason. Ferroelectri. Freq. Control 2013, 60, 805–813. [Google Scholar] [CrossRef] [PubMed]
- Stelzer, A.; Pichler, M.; Scheiblhofer, S.; Schuster, S. Identification of SAW ID-tags using an FSCW interrogation unit and model-based evaluation. IEEE Trans. Ultrason. Ferroelectri. Freq. Control 2004, 51, 1412–1420. [Google Scholar] [CrossRef]
- Klaffenböck, M.; Schuster, S.; Scheiblhofer, S.; Stelzer, A. Model-Based Identification Method for Pulse Position Coded Surface Acoustic Wave Identification Tags. IEEE Trans. Instrum. Meas. 2014, 63, 2405–2413. [Google Scholar] [CrossRef]
- Reindl, L.; Scholl, G.; Ostertag, T.; Scherr, H.; Wolff, U.; Schmidt, F. Theory and application of passive SAW radio transponders as sensors. IEEE Trans. Ultrason. Ferroelectri. Freq. Control 1998, 45, 1281–1292. [Google Scholar] [CrossRef] [PubMed]
- Scheiblhofer, S.; Schuster, S.; Stelzer, A.; Hauser, R. S-FSCW-Radar based High Resolution Temperature Measurement with SAW Sensors. In Proceedings of the International Symposium on Signals, Systems, and Electronics (ISSSE’04), Linz, Austria, 10–13 August 2004. [Google Scholar]
- Stelzer, A.; Scheiblhofer, S.; Schuster, S.; Brandl, M. Multi reader/multi-tag SAW RFID systems combining tagging, sensing, and ranging for industrial applications. In Proceedings of the 2008 IEEE International Frequency Control Symposium, Honolulu, HI, USA, 19–21 May 2008; pp. 263–272. [Google Scholar] [CrossRef]
- Scheiblhofer, S.; Pfeffer, C.; Feger, R.; Stelzer, A. An S-FSCW based multi-channel reader system for beamforming applications using surface acoustic wave sensors. In Proceedings of the 2010 Conference ICECom, 20th International Conference on Applied Electromagnetics and Communications, Dubrovnik, Croatia, 20–23 September 2010; pp. 1–4. [Google Scholar]
- Pfeffer, C.; Scheiblhofer, S.; Feger, R.; Stelzer, A. An S-FSCW Based Multi-Channel Reader System for Beamforming Applications using Surface Acoustic Wave Sensors. Radioengineering 2011, 20, 748–754. [Google Scholar]
- Binder, A.; Fachberger, R.; Lenzhofer, M. Phase stability comparison of SAW sensor evaluation with various CW type radars. Procedia Eng. 2010, 5, 661–664. [Google Scholar] [CrossRef]
- Fachberger, R.; Bruckner, G.; Hauser, R.; Reindl, L. Wireless SAW based high-temperature measurement systems. In Proceedings of the 2006 IEEE International Frequency Control Symposium and Exposition, Miami, FL, USA, 4–7 June 2006; pp. 358–367. [Google Scholar] [CrossRef]
- Scholz, P.; Dierkes, M.; Hilleringmann, U. Low-Cost Transceiver Unit for SAW-Sensors Using Customized Hardware Components. In Proceedings of the 2006 IEEE Ultrasonics Symposium, Vancouver, BC, Canada, 2–6 October 2006; pp. 953–956. [Google Scholar] [CrossRef]
- Binder, A.; Fachberger, R. Wireless SAW Temperature Sensor System for High-Speed High-Voltage Motors. IEEE Sens. J. 2011, 11, 966–970. [Google Scholar] [CrossRef]
- Plessky, V.; Ostertag, T.; Kalinin, V.; Lyulin, B. SAW-tag system with an increased reading range. In Proceedings of the 2010 IEEE International Ultrasonics Symposium, San Diego, CA, USA, 11–14 October 2010; pp. 531–534. [Google Scholar] [CrossRef]
- Gao, Z.; Chen, Z.; Huang, X.; Tong, R.; Wang, M. Design and implementation of SAW reader receiving circuit. In Proceedings of the 2013 Symposium on Piezoelectricity, Acoustic Waves, and Device Applications, Changsha, China, 25–27 October 2013; pp. 1–4. [Google Scholar] [CrossRef]
- Silva, D.; Mendes, J.C.; Pereira, A.B.; Gégot, F.; Alves, L.N. Measuring Torque and Temperature in a Rotating Shaft Using Commercial SAW Sensors. Sensors 2017, 17, 1547. [Google Scholar] [CrossRef] [PubMed]
- Pohl, A.; Seifert, F. New applications of wirelessly interrogable passive SAW sensors. IEEE Trans. Microw. Theory Tech. 1998, 46, 2208–2212. [Google Scholar] [CrossRef]
- Hauser, R.; Fachberger, R.; Bruckner, G.; Smetana, W.; Reicher, R.; Stelzer, A.; Scheiblhofer, S.; Schuster, S. A wireless SAW-based temperature sensor for harsh environment. In Proceedings of the IEEE Sensors, Vienna, Austria, 24–27 October 2004; pp. 860–863. [Google Scholar] [CrossRef]
- Pohl, A.; Seifert, F.; Reindl, L.; Scholl, G.; Ostertag, T.; Pietsch, W. Radio signals for SAW ID tags and sensors in strong electromagnetic interference. In Proceedings of the 1994 IEEE Ultrasonics Symposium, Cannes, France, 31 October–3 November 1994; Volume 1, pp. 195–198. [Google Scholar] [CrossRef]
- Bulst, W.E.; Fischerauer, G.; Reindl, L. State of the art in wireless sensing with surface acoustic waves. IEEE Trans. Ind. Electron. 2001, 48, 265–271. [Google Scholar] [CrossRef]
- Bazuin, B.J.; Atashbar, M.Z.; Krishnamurthy, S. A prototype burst transceiver for SAW sensors interrogation. In Proceedings of the International Conference on Intelligent Sensing and Information, Chennai, India, 4–7 January 2004; pp. 190–195. [Google Scholar] [CrossRef]
- Goavec-Mérou, G.; Chrétien, N.; Friedt, J.M.; Sandoz, P.; Martin, G.; Lenczner, M.; Ballandras, S. Fast contactless vibrating structure characterization using real time field programmable gate array-based digital signal processing: Demonstrations with a passive wireless acoustic delay line probe and vision. Rev. Sci. Instrum. 2014, 85, 015109. [Google Scholar] [CrossRef] [PubMed]
- Chrétien, N.; Friedt, J.M.; Martin, G.; Ballandras, S. A stroboscopic approach to surface acoustic wave delay line interrogation. In Proceedings of the 2013 Joint European Frequency and Time Forum International Frequency Control Symposium (EFTF/IFC), Prague, Czech Republic, 21–25 January 2013; pp. 771–774. [Google Scholar] [CrossRef]
- Minary, F.; Rabus, D.; Martin, G.; Friedt, J.M. Note: A dual-chip stroboscopic pulsed RADAR for probing passive sensors. Rev. Sci. Instrum. 2016, 87, 096104. [Google Scholar] [CrossRef] [PubMed]
- Grossman, R.; Michel, J.; Sachs, T.; Schrufer, E. Measurement of mechanical, quantities using quartz sensors. In Proceedings of the Tenth European Frequency and Time Forum EFTF 96 (IEE Conf. Publ. 418), Brighton, UK, 5–7 March 1996; pp. 376–381. [Google Scholar] [CrossRef]
- Pohl, A.; Ostermayer, G.; Seifert, F. Wireless sensing using oscillator circuits locked to remote high-Q SAW resonators. IEEE Trans. Ultrason. Ferroelectri. Freq. Control 1998, 45, 1161–1168. [Google Scholar] [CrossRef] [PubMed]
- Kalinin, V.; Lohr, R.; Leigh, A.; Bown, G. Application of Passive SAW Resonant Sensors to Contactless Measurement of the Output Engine Torque in Passenger Cars. In Proceedings of the 2007 IEEE International Frequency Control Symposium Joint with the 21st European Frequency and Time Forum, Geneva, Switzerland, 29 May–1 June 2007; pp. 499–504. [Google Scholar] [CrossRef]
- Wen, Y.; Li, P.; Yang, J.; Zheng, M. Detecting and evaluating the signals of wirelessly interrogational passive SAW resonator sensors. IEEE Sens. J. 2004, 4, 828–836. [Google Scholar] [CrossRef]
- Dixon, B.; Kalinin, V.; Beckley, J.; Lohr, R. A Second Generation In-Car Tire Pressure Monitoring System Based on Wireless Passive SAW Sensors. In Proceedings of the IEEE International Frequency Control Symposium and Exposition, Miami, FL, USA, 4–7 June 2006; pp. 374–380. [Google Scholar] [CrossRef]
- Hamsch, M.; Hoffmann, R.; Buff, W.; Binhack, M.; Klett, S. An interrogation unit for passive wireless SAW sensors based on Fourier transform. IEEE Trans. Ultrason. Ferroelectri. Freq. Control 2004, 51, 1449–1456. [Google Scholar] [CrossRef]
- Kalinin, V. Influence of receiver noise properties on resolution of passive wireless resonant SAW sensors. In Proceedings of the IEEE Ultrasonics Symposium, Rotterdam, The Netherlands, 18–21 September 2005; pp. 1452–1455. [Google Scholar] [CrossRef]
- Scholl, G.; Ostertag, T.; Reindl, L.; Ruile, W. Identification and/or Sensor System. DE Patent 441 3211C2, 1997.
- Fowler, M.L.; Johnson, J.A. Extending the threshold and frequency range for phase-based frequency estimation. IEEE Trans. Signal Process. 1999, 47, 2857–2863. [Google Scholar] [CrossRef]
- So, H.C.; Chan, F.K.W.; Sun, W. Subspace Approach for Fast and Accurate Single-Tone Frequency Estimation. IEEE Trans. Signal Process. 2011, 59, 827–831. [Google Scholar] [CrossRef]
- Liu, B.; Zhang, C.; Ji, X.; Chen, J.; Han, T. An Improved Performance Frequency Estimation Algorithm for Passive Wireless SAW Resonant Sensors. Sensors 2014, 14, 22261–22273. [Google Scholar] [CrossRef] [PubMed]
- Kalinin, V. Comparison of frequency estimators for interrogation of wireless resonant SAW sensors. In Proceedings of the 2015 Joint Conference of the IEEE International Frequency Control Symposium the European Frequency and Time Forum, Denver, CO, USA, 12–16 April 2015; pp. 498–503. [Google Scholar] [CrossRef]
- Liu, B.; Zeng, Y.; Tang, P. A noise-robust method for passive wireless resonant SAW sensor. Sens. Rev. 2016, 36, 312–320. [Google Scholar] [CrossRef]
- Kalinin, V.; Beckley, J.; Makeev, I. High-speed reader for wireless resonant SAW sensors. In Proceedings of the 2012 European Frequency and Time Forum, Gothenburg, Sweden, 23–27 April 2012; pp. 428–435. [Google Scholar] [CrossRef]
- Lurz, F.; Lindner, S.; Mann, S.; Linz, S.; Weigel, R.; Koelpin, A. Precise and fast frequency determination of resonant SAW sensors by a low-cost Six-Port interferometer. In Proceedings of the 2016 IEEE International Instrumentation and Measurement Technology Conference, Taipei, Taiwan, 23–26 May 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Weigel, R.; Lurz, F.; Lindner, S.; Mann, S.; Linz, S.; Koelpin, A. A fast and precise Six-Port-based IFM technique for wireless resonant SAW sensing. In Proceedings of the 2016 IEEE International Ultrasonics Symposium (IUS), Tours, France, 18–21 September 2016; pp. 1–4. [Google Scholar] [CrossRef]
- Lurz, F.; Lindner, S.; Linz, S.; Mann, S.; Weigel, R.; Koelpin, A. High-Speed Resonant Surface Acoustic Wave Instrumentation Based on Instantaneous Frequency Measurement. IEEE Trans. Instrum. Meas. 2017, 66, 974–984. [Google Scholar] [CrossRef]
- Goddard, N.E. Instantaneous Frequency-Measuring Receivers (Letters). IEEE Trans. Microw. Theory Tech. 1972, 20, 292–293. [Google Scholar] [CrossRef]
- Collins, J.H.; Grant, P.M. A Review of Current and Future Components for Electronic Warfare Receivers. IEEE Trans. Microw. Theory Tech. 1981, 29, 395–403. [Google Scholar] [CrossRef]
- East, P.W. Fifty years of instantaneous frequency measurement. IET Radar Sonar Navig. 2012, 6, 112–122. [Google Scholar] [CrossRef]
- Pandolfi, C.; Fitini, E.; Gabrielli, G.; Megna, E.; Zaccaron, A. Comparison of analog IFM and digital frequency measurement receivers for electronic warfare. In Proceedings of the The 7th European Radar Conference, Paris, France, 30 September–1 October 2010; pp. 232–235. [Google Scholar]
- Engen, G.F.; Hoer, C.A. Application of an Arbitrary 6-Port Junction to Power-Measurement Problems. IEEE Trans. Instrum. Meas. 1972, 21, 470–474. [Google Scholar] [CrossRef]
- Engen, G.F. The Six-Port Reflectometer: An Alternative Network Analyzer. IEEE Trans. Microw. Theory Tech. 1977, 25, 1075–1080. [Google Scholar] [CrossRef]
- Tatu, S.O.; Serban, A.; Helaoui, M.; Koelpin, A. Multiport Technology: The New Rise of an Old Concept. IEEE Microw. Mag. 2014, 15, S34–S44. [Google Scholar] [CrossRef]
- Staszek, K.; Gruszczynski, S.; Wincza, K. Six-Port Reflectometer Providing Enhanced Power Distribution. IEEE Trans. Microw. Theory Tech. 2016, 64, 939–951. [Google Scholar] [CrossRef]
- Koelpin, A.; Lurz, F.; Linz, S.; Mann, S.; Will, C.; Lindner, S. Six-Port Based Interferometry for Precise Radar and Sensing Applications. Sensors 2016, 16, 1556. [Google Scholar] [CrossRef] [PubMed]
- Moghaddasi, J.; Djerafi, T.; Wu, K. Multiport Interferometer-Enabled 2-D Angle of Arrival (AOA) Estimation System. IEEE Trans. Microw. Theory Tech. 2017, 65, 1767–1779. [Google Scholar] [CrossRef]
- Mirzavand, R.; Honari, M.M.; Mousavi, P. Direct-Conversion Sensor for Wireless Sensing Networks. IEEE Trans. Ind. Electron. 2017, 64, 9675–9682. [Google Scholar] [CrossRef]
- Osth, J.; Serban, A.; Owais; Karlsson, M.; Gong, S.; Haartsen, J.; Karlsson, P. Six-Port Gigabit Demodulator. IEEE Trans. Microw. Theory Tech. 2011, 59, 125–131. [Google Scholar] [CrossRef]
- Lindner, S.; Barbon, F.; Linz, S.; Lurz, F.; Mann, S.; Weigel, R.; Koelpin, A. ADC depending limitations for Six-Port based distance measurement systems. In Proceedings of the 2015 IEEE Topical Conference on Wireless Sensors and Sensor Networks (WiSNet), San Diego, CA, USA, 25–28 January 2015; pp. 29–31. [Google Scholar] [CrossRef]
- Lurz, F.; Dorn, C.; Lindner, S.; Linz, S.; Mann, S.; Weigel, R.; Koelpin, A. Digital phase correction for multiplexed ADCs in low-cost Six-Port interferometers. In Proceedings of the 2016 IEEE Topical Conference on Wireless Sensors and Sensor Networks (WiSNet), Austin, TX, USA, 24–27 January 2016; pp. 56–59. [Google Scholar] [CrossRef]
- Engen, G.F. Calibrating the Six-Port Reflectometer by Means of Sliding Terminations. IEEE Trans. Microw. Theory Tech. 1978, 26, 951–957. [Google Scholar] [CrossRef]
- Li, J.; Bosisio, R.G.; Wu, K. Dual-tone calibration of six-port junction and its application to the six-port direct digital millimetric receiver. IEEE Trans. Microw. Theory Tech. 1996, 44, 93–99. [Google Scholar] [CrossRef]
- Linz, S.; Vinci, G.; Lindner, S.; Mann, S.; Lurz, F.; Barbon, F.; Weigel, R.; Koelpin, A. I/Q imbalance compensation for Six-port interferometers in radar applications. In Proceedings of the 2014 44th European Microwave Conference, Rome, Italy, 6–9 October 2014; pp. 746–749. [Google Scholar] [CrossRef]
- Staszek, K.; Linz, S.; Lurz, F.; Mann, S.; Weigel, R.; Koelpin, A. Improved calibration procedure for six-port based precise displacement measurements. In Proceedings of the 2016 IEEE Topical Conference on Wireless Sensors and Sensor Networks (WiSNet), Austin, TX, USA, 24–27 January 2016; pp. 60–63. [Google Scholar] [CrossRef]
- Will, C.; Linz, S.; Mann, S.; Lurz, F.; Lindner, S.; Weigel, R.; Koelpin, A. Segmental polynomial approximation based phase error correction for precise near field displacement measurements using Six-Port microwave interferometers. In Proceedings of the 2017 IEEE Topical Conference on Wireless Sensors and Sensor Networks (WiSNet), Phoenix, AZ, USA, 15–18 January 2017; pp. 23–25. [Google Scholar] [CrossRef]
- Linz, S.; Will, C.; Lurz, F.; Lindner, S.; Mann, S.; Schober, R.; Weigel, R.; Koelpin, A. Detector nonlinearity in Six-port radar. In Proceedings of the 2017 IEEE Topical Conference on Wireless Sensors and Sensor Networks (WiSNet), Phoenix, AZ, USA, 15–18 January 2017; pp. 19–22. [Google Scholar] [CrossRef]
- Barbon, F.; Koelpin, A.; Lindner, S.; Linz, S.; Mann, S.; Halder, E.; Dingler, P. Method for Measuring the Frequency of an Electrical Signal and an Electrical Measuring System. DE Patent 102013209364A1, 27 November 2014. [Google Scholar]
- Scheiner, B.; Lurz, F.; Michler, F.; Lindner, S.; Linz, S.; Weigel, R.; Koelpin, A. Fast dual-synthesizer for six-port in-situ linearization in the 24 GHz ISM-band. In Proceedings of the 2018 11th German Microwave Conference (GeMiC), Freiburg, Germany, 12–14 March 2018; pp. 223–226. [Google Scholar] [CrossRef]
- Lurz, F.; Lindner, S.; Mann, S.; Linz, S.; Barbon, F.; Weigel, R.; Koelpin, A. A low-cost 2.4GHz frequency measurement system for microsecond time domain pulses based on Six-Port technology. In Proceedings of the 2014 44th European Microwave Conference, Rome, Italy, 6–9 October 2014; pp. 171–174. [Google Scholar] [CrossRef]
- Lurz, F.; Scheiner, B.; Linz, S.; Weigel, R.; Koelpin, A. Compact PCB Delay Line for Six-Port Based Instantaneous Frequency Measurement. In Proceedings of the 22nd International Microwave and Radar Conference (MIKON), Poznan, Poland, 14–17 May 2018; pp. 118–121. [Google Scholar]
- Reindl, L.; Ruppel, C.C.W.; Berek, S.; Knauer, U.; Vossiek, M.; Heide, P.; Oreans, L. Design, fabrication, and application of precise SAW delay lines used in an FMCW radar system. IEEE Trans. Microw. Theory Tech. 2001, 49, 787–794. [Google Scholar] [CrossRef]
- Lonsdale, A.; Lonsdale, B. Apparatus and Method for Interrogating a Passive Sensor. US Patent 6,765,493,B2, 22 October 2002. [Google Scholar]
- Beckley, J.; Kalinin, V.; Lee, M.; Voliansky, K. Non-contact torque sensors based on SAW resonators. In Proceedings of the 2002 IEEE International Frequency Control Symposium and PDA Exhibition, New Orleans, LA, USA, 29–31 May 2002; pp. 202–213. [Google Scholar] [CrossRef]
- Friedt, J.M.; Droit, C.; Martin, G.; Ballandras, S. A wireless interrogation system exploiting narrowband acoustic resonator for remote physical quantity measurement. Rev. Sci. Instrum. 2010, 81, 014701. [Google Scholar] [CrossRef] [PubMed]
- Friedt, J.M.; Droit, C.; Ballandras, S.; Alzuaga, S.; Martin, G.; Sandoz, P. Remote vibration measurement: A wireless passive surface acoustic wave resonator fast probing strategy. Rev. Sci. Instrum. 2012, 83, 055001. [Google Scholar] [CrossRef] [PubMed]
- Droit, C.; Friedt, J.; Rétornaz, T.; Ballandrasa, S. Interrogation strategies for probing wireless passive SAW sensors. Procedia Eng. 2011, 25, 1024–1027. [Google Scholar] [CrossRef]
- Dyke, K.S.V. The Piezo-Electric Resonator and Its Equivalent Network. Proc. Inst. Radio Eng. 1928, 16, 742–764. [Google Scholar] [CrossRef]
- Droit, C.; Martin, G.; Ballandras, S.; Friedt, J.M. Note: A frequency modulated wireless interrogation system exploiting narrowband acoustic resonator for remote physical quantity measurement. Rev. Sci. Instrum. 2010, 81, 056103. [Google Scholar] [CrossRef] [PubMed]
- Droit, C.; Friedt, J.M.; Martin, G.; Ballandras, S. Remote control of SAW resonators using a frequency-modulation-based interrogation strategy. In Proceedings of the 2010 IEEE International Frequency Control Symposium, Newport Beach, CA, USA, 1–4 June 2010; pp. 503–510. [Google Scholar] [CrossRef]
- Wagers, R.S. Spurious acoustic responses in SAW devices. Proc. IEEE 1976, 64, 699–702. [Google Scholar] [CrossRef]
- Nakamura, H.; Nakanishi, H.; Goto, R.Y.; Hashimoto, K. Suppression of transverse-mode spurious responses for saw resonators on SiO2/Al/LiNbO3 structure by selective removal of SiO2. IEEE Trans. Ultrason. Ferroelectri. Freq. Control 2011, 58, 2188–2193. [Google Scholar] [CrossRef] [PubMed]
- Li, P.; Xie, H.; Wen, Y.; Wang, C.; Huang, S.; Ren, Z.; He, J.; Lu, D. A SAW passive wireless sensor system for monitoring temperature of an electric cord connector at long distance. In Proceedings of the 2011 IEEE SENSORS, Limerick, Ireland, 28–31 October 2011; pp. 1831–1834. [Google Scholar] [CrossRef]
- Stoney, R.; O’Donnell, G.E.; Geraghty, D. Dynamic wireless passive strain measurement in CNC turning using surface acoustic wave sensors. Int. J. Adv. Manuf. Technol. 2013, 69, 1421–1430. [Google Scholar] [CrossRef]
- Stoney, R.; Geraghty, D.; O’Donnell, G.E. Characterization of Differentially Measured Strain Using Passive Wireless Surface Acoustic Wave (SAW) Strain Sensors. IEEE Sens. J. 2014, 14, 722–728. [Google Scholar] [CrossRef]
- Kalinin, V. RF Rotary Couplers for Contactless Torque Sensors Based on SAW Resonators. In Proceedings of the 22nd European Frequency and Time Forum (EFTF), Toulouse, France, 22–25 April 2008. [Google Scholar]
- Boccard, J.M.; Katus, P.; Renevier, R.; Reindl, L.M.; Friedt, J.M. Near-field interrogation of SAW resonators on rotating machinery. J. Sens. Sens. Syst. 2013, 2, 147–156. [Google Scholar] [CrossRef]
- Gombé, B.O.; Mérou, G.G.; Breschi, K.; Guyennet, H.; Friedt, J.M.; Felea, V.; Medjaher, K. A SAW wireless sensor network platform for industrial predictive maintenance. J. Intell. Manuf. 2017. [Google Scholar] [CrossRef]
- Pfeffer, C.; Wagner, T.; Scheiblhofer, S.; Stelzer, A. Interference recognition and fault reduction method for FSCW-based SAW-tag readers. In Proceedings of the 2013 European Radar Conference, Nuremberg, Germany, 9–11 October 2013; pp. 125–128. [Google Scholar]
- Helbig, C.; Aertz, F.; Ostertag, T.; Hutter, R. System and Method for Suppressing Interference in Frequency-Modulated Radar Systems. EP Patent 2,529,245,A1, 7 February 2013. [Google Scholar]
- Lurz, F.; Lindner, S.; Koelpin, A.; Halder, E.; Dingler, P.; Sept-Enzel, G. Electrical Measurement System for Frequency Measurement and Detection of Interfering Signals and Operating Method Therefor. DE Patent 102016119562B3, 15 February 2018. [Google Scholar]
- Birkholz, F. Product Catalogue. SAW COMPONENTS Dresden GmbH, 2017. Available online: http://sawcomponents.de/fileadmin/user_upload/pdf/Product_Catalogue.pdf (accessed on 8 March 2018).
- pro-micron GmbH & Co. KG. TiP300 Wireless Temperature Sensors. 2016. Available online: https://www.pro-micron.de/wp-content/uploads/2017/10/tip300-product-information-ENG.pdf (accessed on 8 March 2018).
- Sensor Technology Ltd. RWT410/420 Series Torque Transducer. 2015. Available online: https://www.sensors.co.uk/files/dsm/Datasheet_RWT410-420.pdf (accessed on 8 March 2018).
- IntelliSAW. IntelliSAW Product Brochure. 2013. Available online: http://www.intellisaw.com/images/stories/brochures/IntellSAW-8PP-Brochure-Oct-2013-Web.pdf (accessed on 8 March 2018).
- Kongsberg Maritime. SENTRY GB-200 Wireless Temperature Monitoring. 2012. Available online: https://www.km.kongsberg.com/ks/web/nokbg0397.nsf/AllWeb/163EC92063150540C12577CB00279D78/$file/P-GB200_CE_D.pdf (accessed on 21 May 2018).
- SENSeOR SAS. HTR02-6AWS Radio-Frequency Transceiver for Wireless Passive SAW Sensors Dedicated to Switchgear Monitoring. 2018. Available online: https://www.senseor.com/senseor-monitoring-solutions/platforms/htr02-platform/product/download/file_id-520 (accessed on 21 May 2018).
- Rasolomboahanginjatovo, A.H.; Sanogo, Y.; Domingue, F.; Dahmane, A.O. Custom PXIe-567X-Based SAW RFID Interrogation Signal Generator. IEEE Sens. J. 2016, 16, 8798–8806. [Google Scholar] [CrossRef]
- Humphries, J.R.; Malocha, D.C. Software defined radio for passive sensor interrogation. In Proceedings of the 2013 Joint European Frequency and Time Forum International Frequency Control Symposium (EFTF/IFC), Prague, Czech Republic, 21–25 July 2013; p. 270. [Google Scholar] [CrossRef]
- Humphries, J.R.; Gallagher, M.W.; Gallagher, D.R.; Weeks, A.R.; Malocha, D.C. Interrogation of orthogonal frequency coded SAW sensors using the USRP. In Proceedings of the 2015 Joint Conference of the IEEE International Frequency Control Symposium the European Frequency and Time Forum, Denver, CO, USA, 12–16 April 2015; pp. 530–535. [Google Scholar] [CrossRef]















© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lurz, F.; Ostertag, T.; Scheiner, B.; Weigel, R.; Koelpin, A. Reader Architectures for Wireless Surface Acoustic Wave Sensors. Sensors 2018, 18, 1734. https://doi.org/10.3390/s18061734
Lurz F, Ostertag T, Scheiner B, Weigel R, Koelpin A. Reader Architectures for Wireless Surface Acoustic Wave Sensors. Sensors. 2018; 18(6):1734. https://doi.org/10.3390/s18061734
Chicago/Turabian StyleLurz, Fabian, Thomas Ostertag, Benedict Scheiner, Robert Weigel, and Alexander Koelpin. 2018. "Reader Architectures for Wireless Surface Acoustic Wave Sensors" Sensors 18, no. 6: 1734. https://doi.org/10.3390/s18061734
APA StyleLurz, F., Ostertag, T., Scheiner, B., Weigel, R., & Koelpin, A. (2018). Reader Architectures for Wireless Surface Acoustic Wave Sensors. Sensors, 18(6), 1734. https://doi.org/10.3390/s18061734