1. Introduction
Global position system (GPS) is the main localization system of Micro Aerial Vehicle (MAV) in an outdoor environment, which has the advantages of low-cost and high-precision [
1]. By combining GPS with the inertial measurement unit (IMU), the GPS/IMU localization system can obtain the meter-level accuracy [
2]. However, GPS cannot be used in the indoor environment [
3] because of the signal shading, obstacles and environmental disturbances. Moreover, the localization precision and reliability for the indoor localization system are much more essential. Generally, the indoor localization system can be divided into non-cooperative localization technology and cooperative localization technology based on whether alternative sensors are introduced to provide additional information.
In the non-cooperative localization type, simultaneous localization and mapping (SLAM) is the most important technology, which includes lidar SLAM(L-SLAM) and visual SLAM (V-SLAM). The L-SLAM technology is very mature on unmanned ground vehicle (UGV), which has the advantages of high speed and reliability since the lidar can measure the precise distance and angle of the obstacles. Furthermore, the filters such as extended Kalman filter (EKF) [
4] or particle filter (PF) [
5] are used to obtain the accurate localization. L-SLAM has been applied in MAV system in recent years gradually. In literature [
6], the reliable L-SLAM is realized on MAV system based on miniature 3D-lidar, and the proposed system can locate the MAV in unknown environments without GPS. Some similar systems are designed based on low-cost 2D-lidar since it is much cheaper and lighter. However, its low refresh frequency results in the matching error during the attitude change and high speed flight. V-SLAM is based on mono camera, RGB-D camera and stereo camera, which uses the graph optimization algorithm to minimize the projection error of key-points. Several V-SLAM systems have been proposed in recent years such as Semi-direct visual odometry (SVO) [
7] and oriented FAST and rotated brief SLAM (ORB-SLAM) [
8]. These two strategies have been applied in many MAV systems, which can realize precise localization based on the high-performance image process unit. However, the robustness issue is an inevitable problem of these pure vision-based methods, due to the fact that image tracking easily fails in the environments with poor visual features. Therefore, research through fusing V-SLAM with other sensors to achieve robust robot navigation is highly demanded.
In the cooperative localization type, base station, motion capture system and 2D markers are utilized as additional sensors. The requirement for on-board sensor and processor is much lower than V-SLAM which makes it suitable for the localization in a particular area. Traditional base station cooperative localization technology uses several signal stations to locate the beacon attached on the target via wireless fidelity (WiFi), ZigBee or radio frequency identification which is very susceptible to the signal multi-path interference, and can only provide meter localization accuracy [
9]. Ultra wideband (UWB) is a short-range radio technology, which has been used for indoor localization in recent years. In contrast to ZigBee or WiFi, the localization via UWB is done with the time of flight methodology so it has good anti-interference capability and centimetre localization accuracy. In reference [
10], the location information of UWB is introduced in the GPS/IMU navigation system which enhances the reliability of the integrated navigation in GPS inapplicable environment. However, UWB is still affected by the metal shielding and absorption. Meanwhile, the cost of it is much higher than other base station cooperative localization technology. Motion capture cooperative localization technology has high reliability and localization accuracy, which is widely used by movie-making, computer vision and control. For example, The Vicon MX motion capture system is a popular high end commercial solution for the development of autonomous aerial robotic [
11]. However, the high cost of the motion capture system limits it only in adaptive industrial or laboratory environments; 2D markers cooperative localization technology is typically introduced in an environment where localization and navigation are needed for robots using low cost machine vision. It can provide accurate six-degrees-of-freedom information of the camera. Meanwhile, it is more reliable and faster than V-SLAM since the markers can be easily identified from a wider range of viewpoints. Therefore, 2D marker array can be used in featureless indoor environments (such as laboratory or corridors) to build a large-scale and cost-effective localization system. For example, the Sky-Trax system uses hundreds of 2D markers to locate the position of materials and equipments inside warehouses and factory [
12].
In Sky-Trax, the 2D marker array is regularly arranged so it is easy to artificially calibrate the position of each marker, but in some cases the markers are irregular, which makes accurate calibration very difficult. Therefore, the automatic mapping of the large-scale 2D marker array is very important in practical application. A straightforward way is to implement the SLAM framework as in the literature [
13]. In literature [
14,
15], the authors use odometer/IMU to estimate the robot’s trajectory. Once the camera trajectory is accurately obtained, marker locations are obtained by triangulation. In literature [
16] a graph is used to describe the geometric relationship of each marker, which is updated dynamically. Whenever a pair of markers are seen in a frame, their relative position is updated and if it is better than the previous one, it is replaced. For localization, they only consider for localization one marker from all visible ones. However, using all visible markers at the same time can lead to a better localization result. Literature [
17] designed a simple marker-based localization system, and the markers are added into the map gradually through the Tf package in robot operate system (ROS) [
18]. Although the system can realize real-time online map building, it has a serious problem of mapping distortion due to lack of correction. Literature [
19] presents a monocular visual-inertial EKF-SLAM system based on 2D markers. Since only 2D markers and IMU are used, drift may occur if the markers are lost for a long time. Moreover, it requires increasing computational resources to handle covariance matrices that are expanded as more markers are added. Literature [
20] proposes a localization method considering all visible markers and handling the mapping as a variant of the sparse bundle adjustment problem. The proposed system can generate an accurate map, but the algorithm runs off-line and requires a large amount of computation.
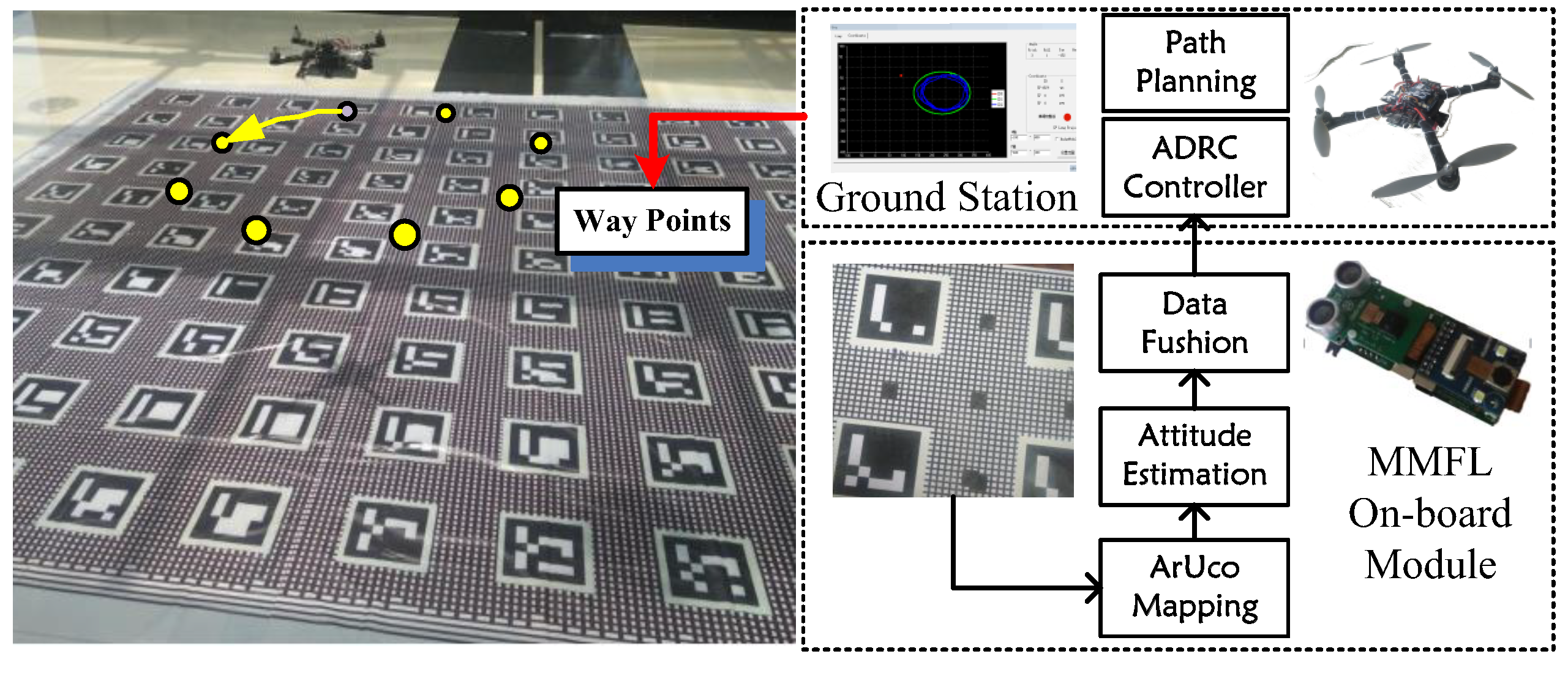
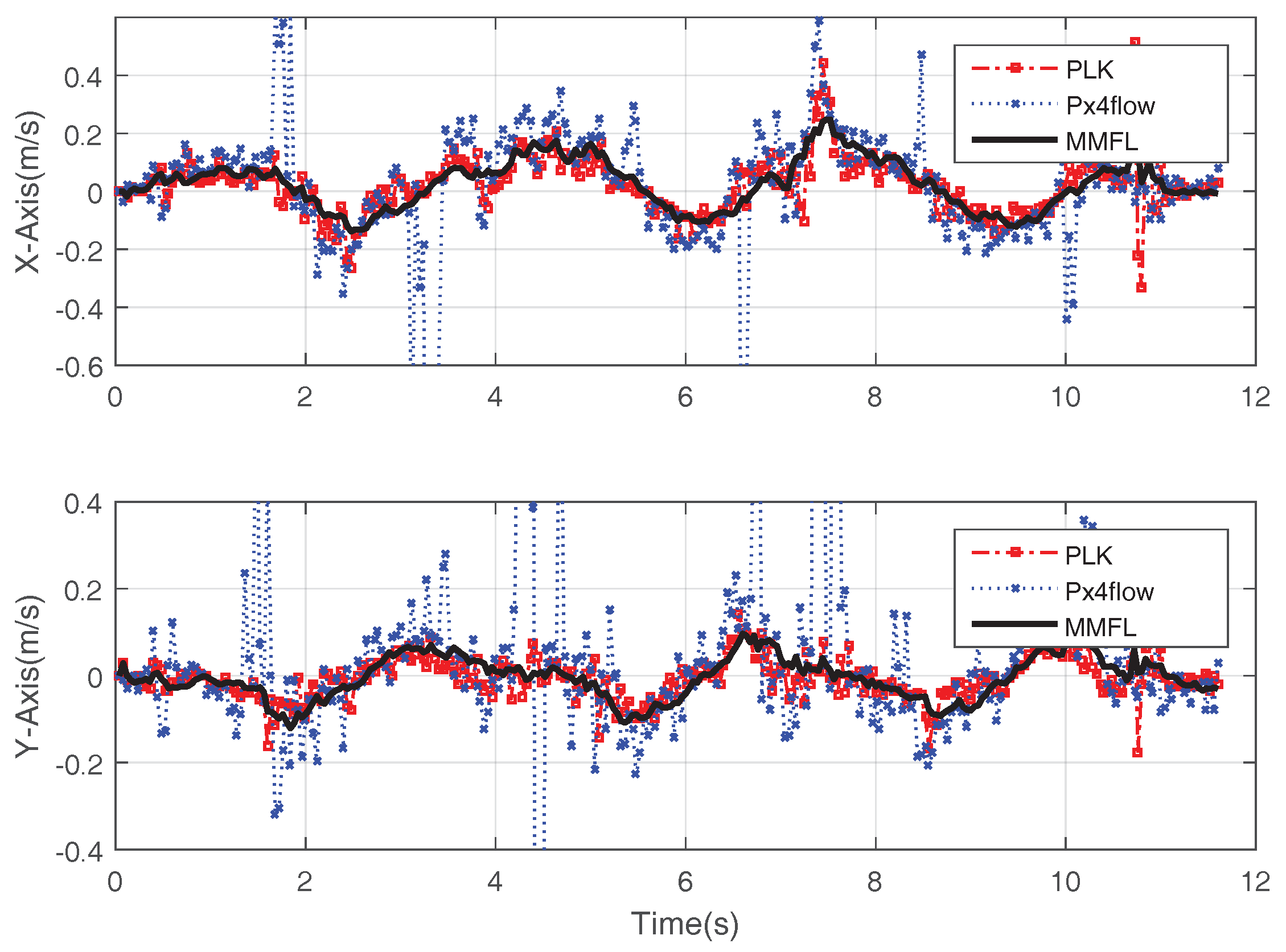
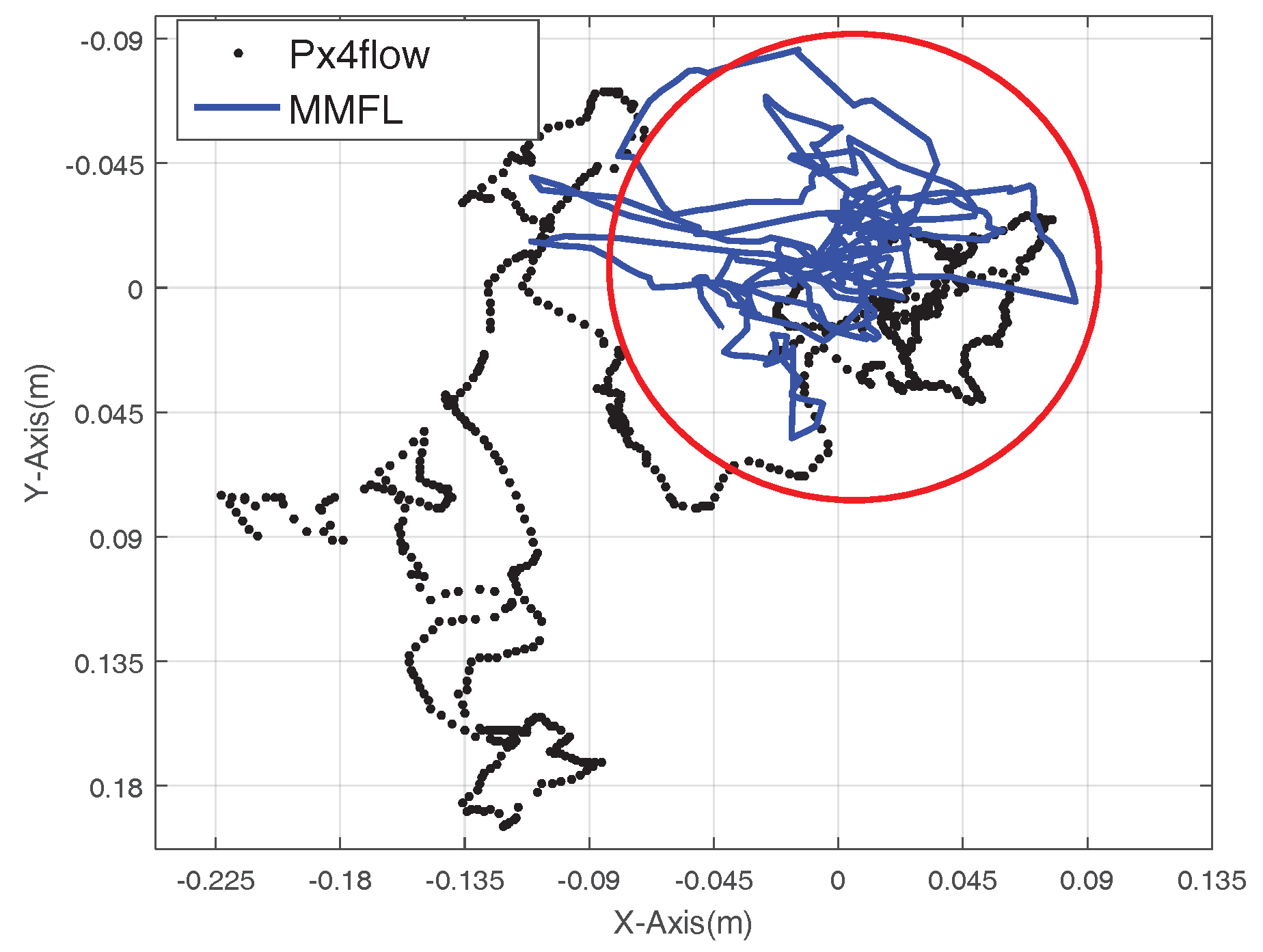
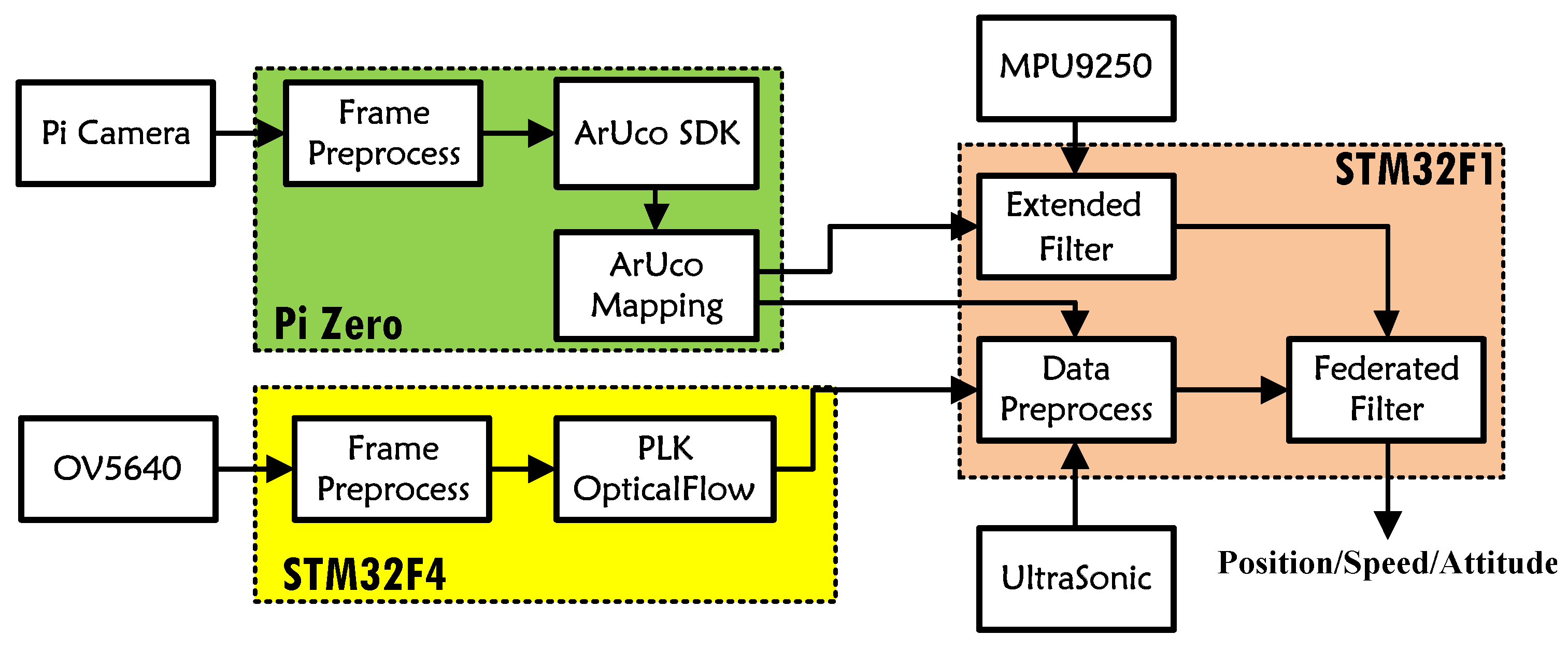
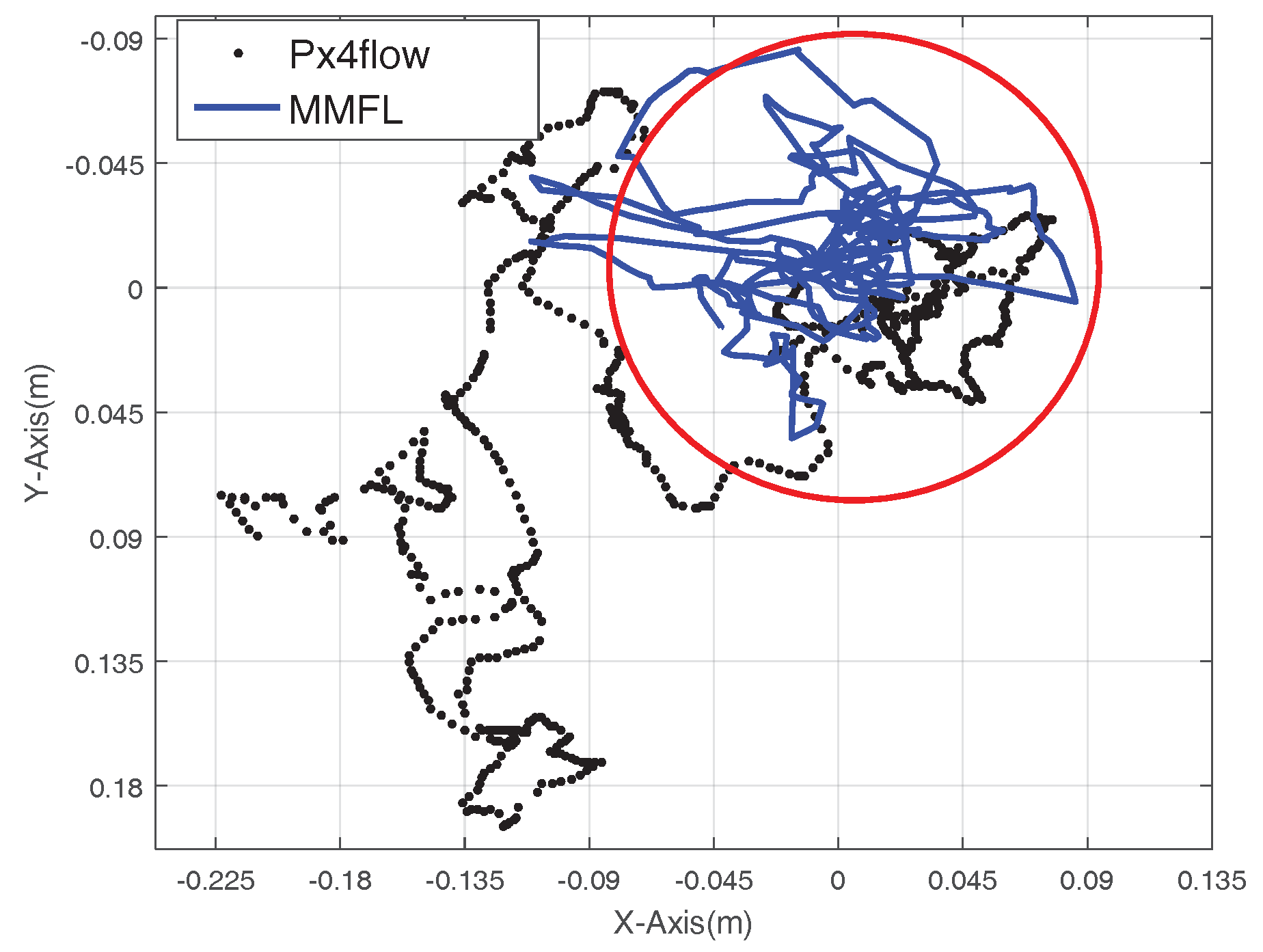
In this paper, a multi-sensor fusion indoor localization system (MMFL) based on ArUco marker is proposed. The proposed ArUco Mapping algorithm can build and correct the map online with Grubbs criterion and K-mean clustering algorithm, which avoids the map distortion due to lack of correction. In order to realize the localization in marker undetectable situation, the federated Kalman filter with adaptive information coefficient is utilized to synthesize multi-source information from marker, optical flow, ultrasonic and the inertial sensor. Thus, the MMFL system can effectively reduce the position drift due to the long-term loss of markers. The presented system not only gives satisfying localization performance, but also has the potential to expand other localization sensors (such as visual odometry, UWB, and lidar) to further improve the localization performance. The on-board MMFL system can be easily realized on a low cost and low power consumption hardware platform including a Raspberry Pi Zero and two STM32 micro controllers produced by STMicroelectronics. The experimental results show that the speed estimation result is better than that of the Px4flow sensor [
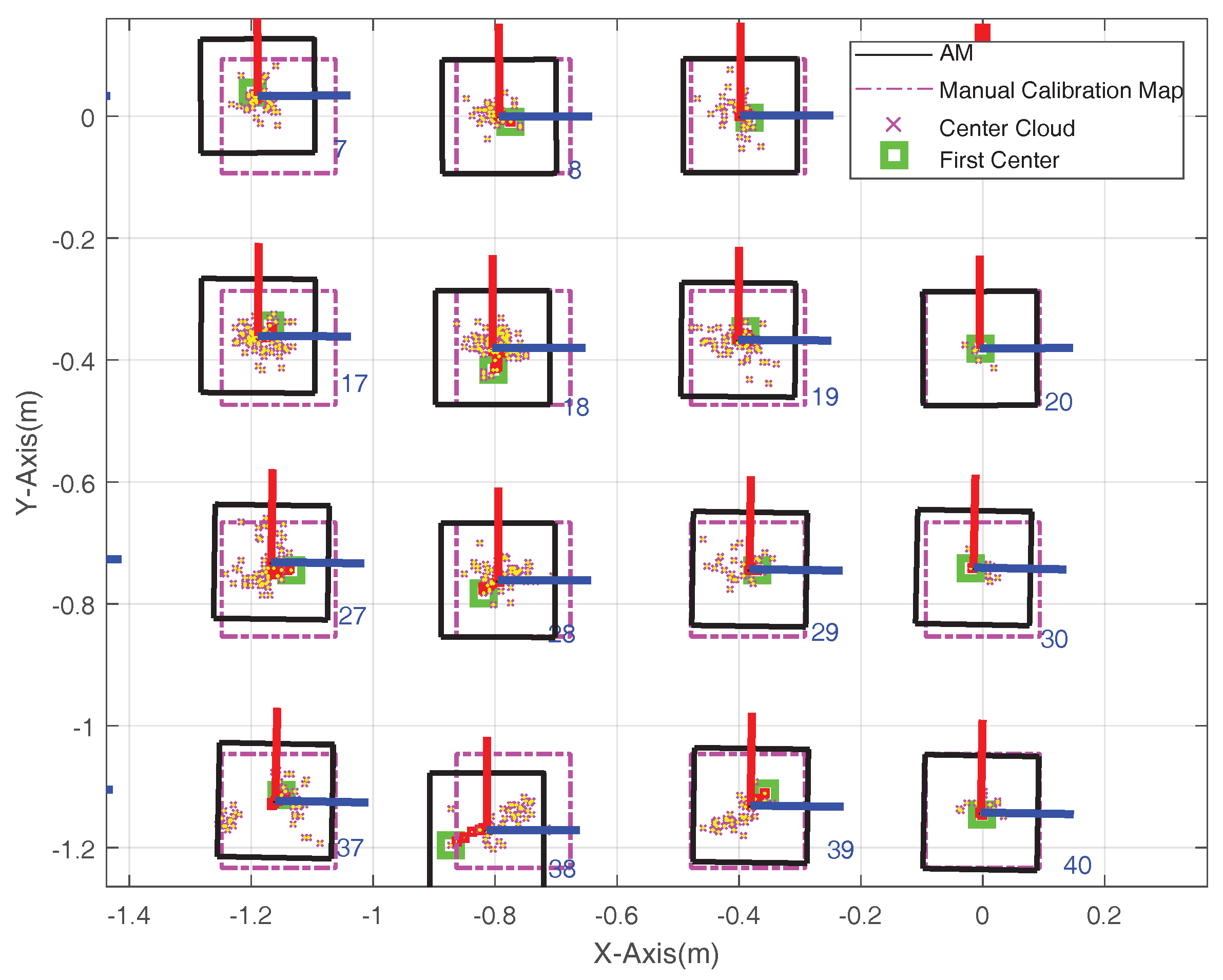
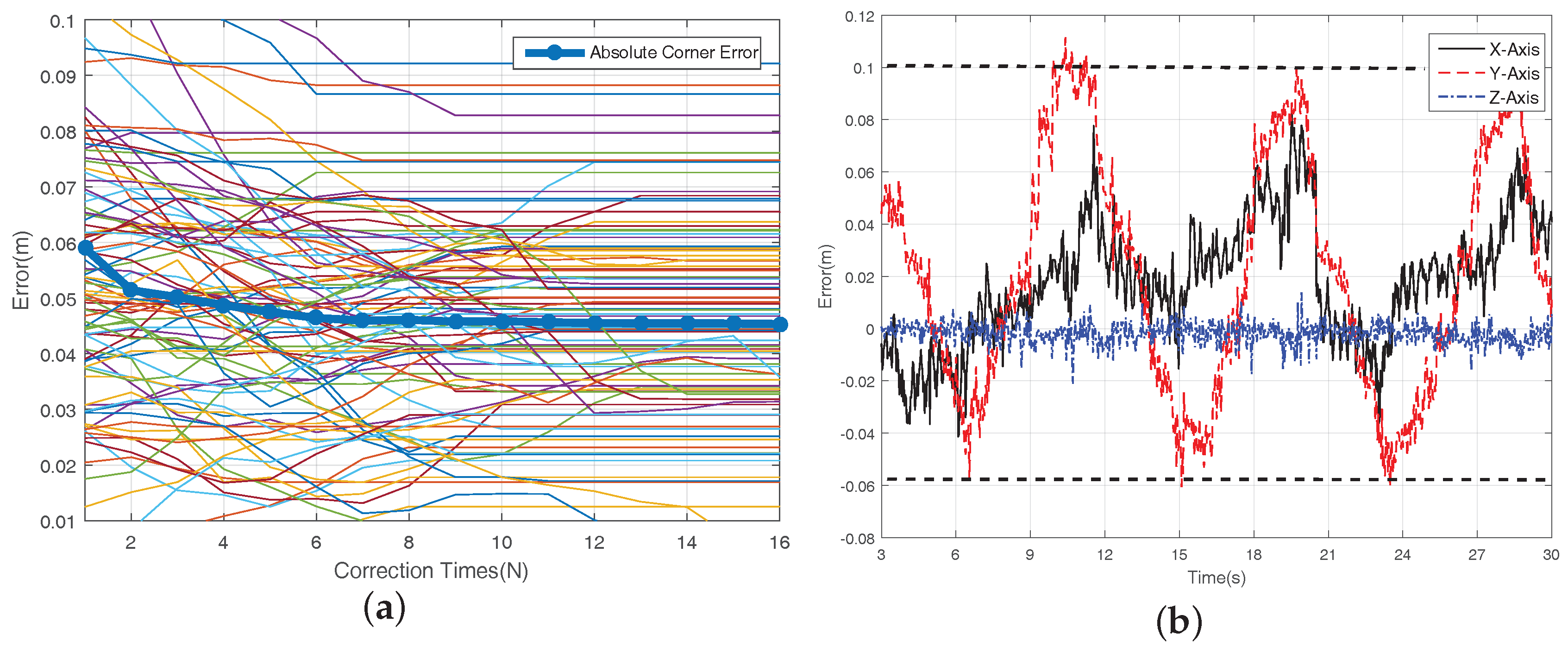
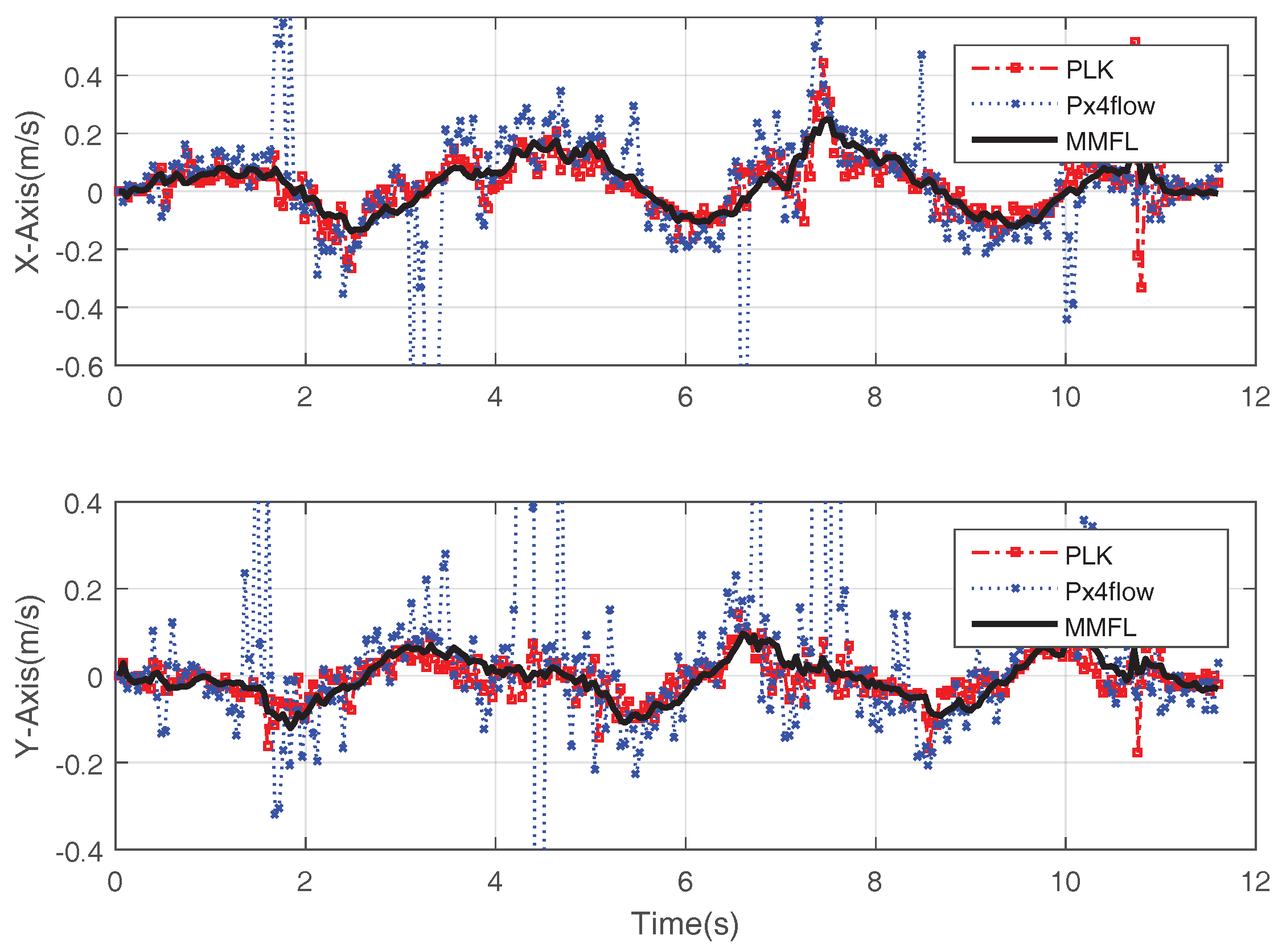
21], and the proposed system has the centimeter level errors in positioning and mapping to the manual calibration map.
The rest of this paper is organized as follows.
Section 2 introduces the core modules in the proposed MMFL system, including the mapping module and speed estimation module described in
Section 2.1, the attitude estimation module described in
Section 2.2, and the multi-sensor fusion module described in
Section 2.3.
Section 3 introduces the hardware design and experimental results of the MMFL system. The experiment results of the proposed mapping algorithm is stated in
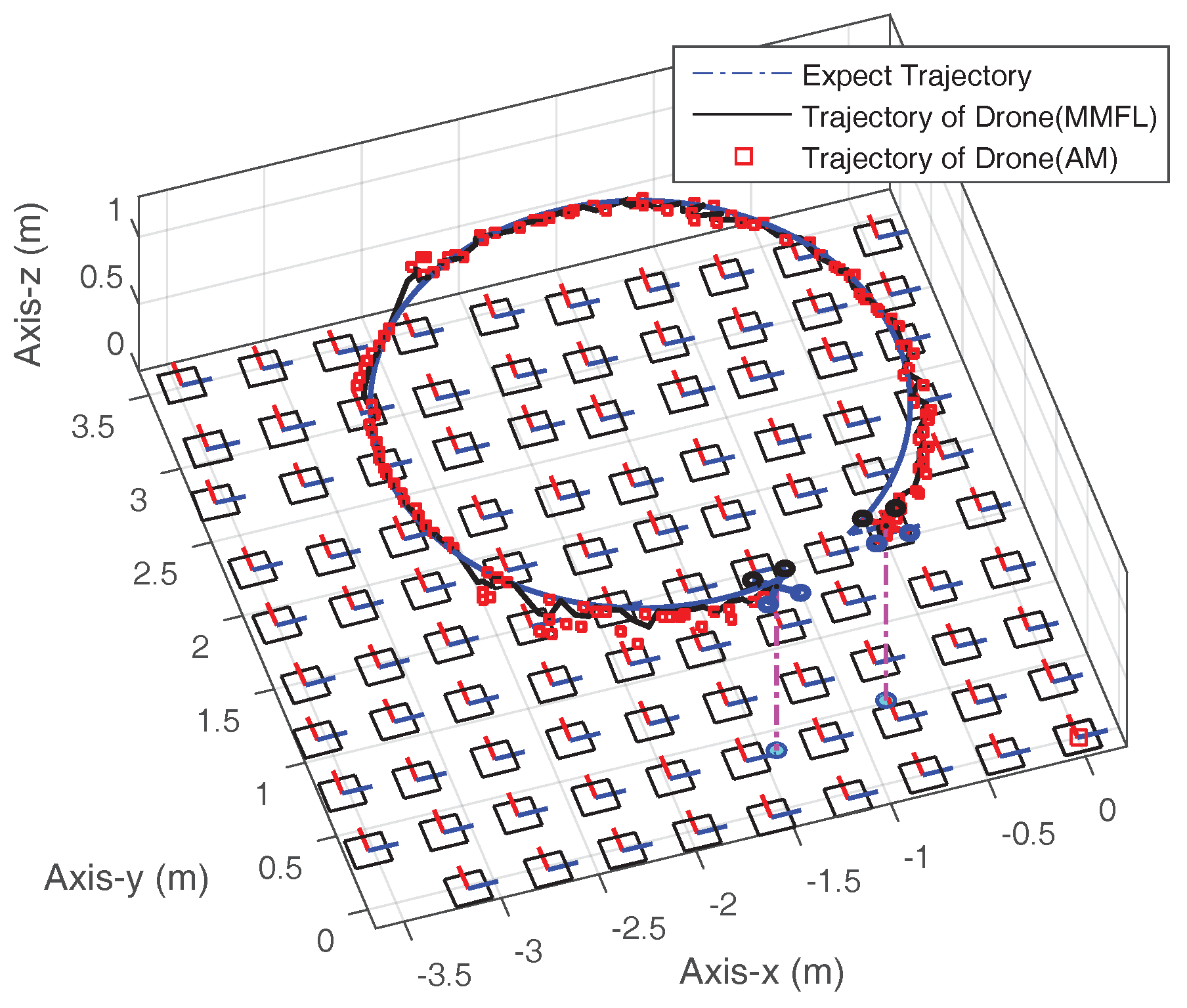
Section 3.1, the experiment result of the multi-sensor fusion algorithm is stated in
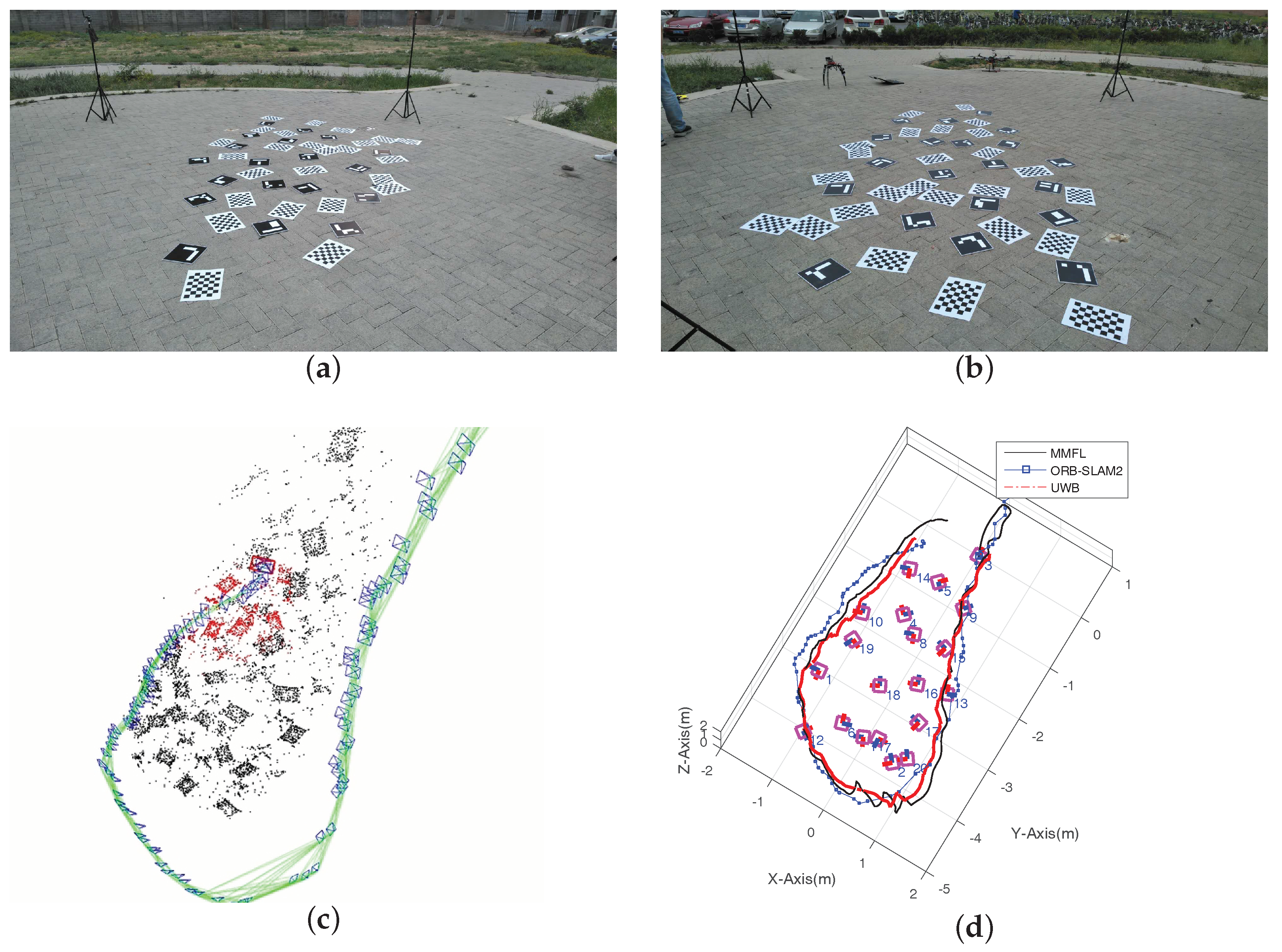
Section 3.2, the comparison experiment with ORB-SLAM2 is stated in
Section 3.3 and the experiments of comparing the hovering performance with Px4flow sensor is stated in
Section 3.4.
2. Multi-Sensor Fusion Indoor Localization System Based on ArUco Marker
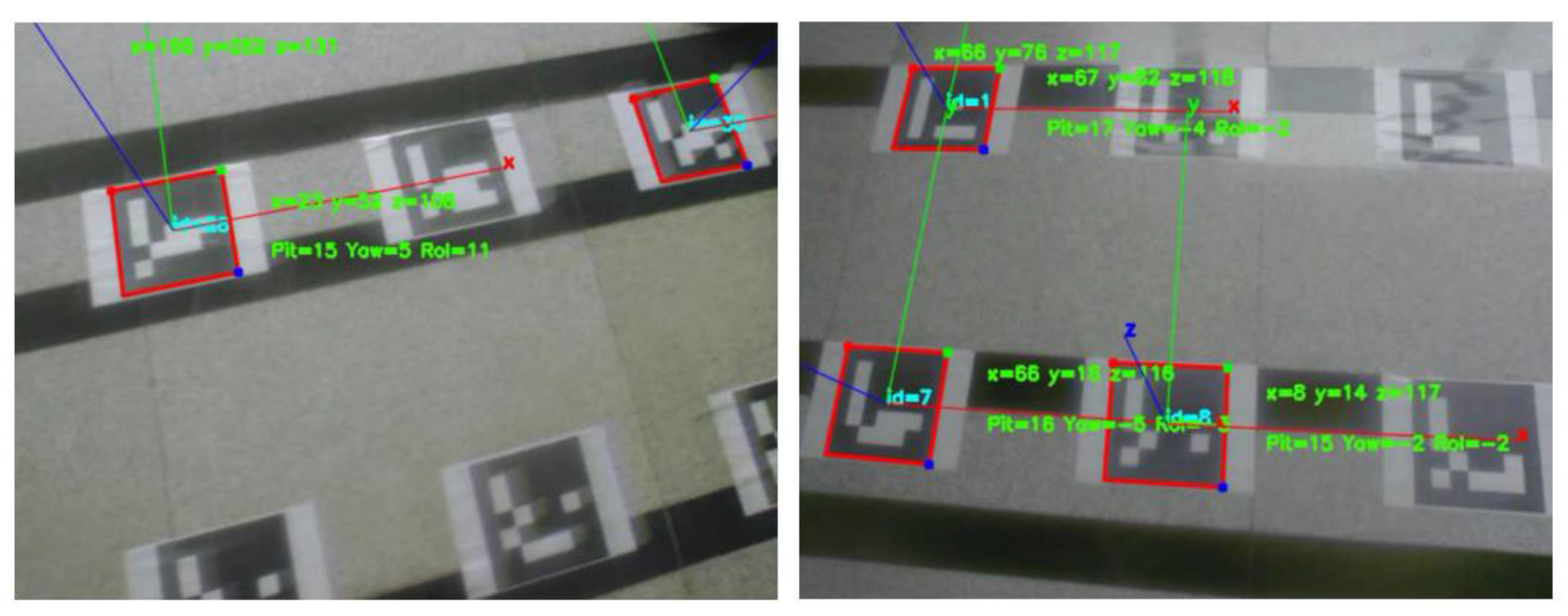
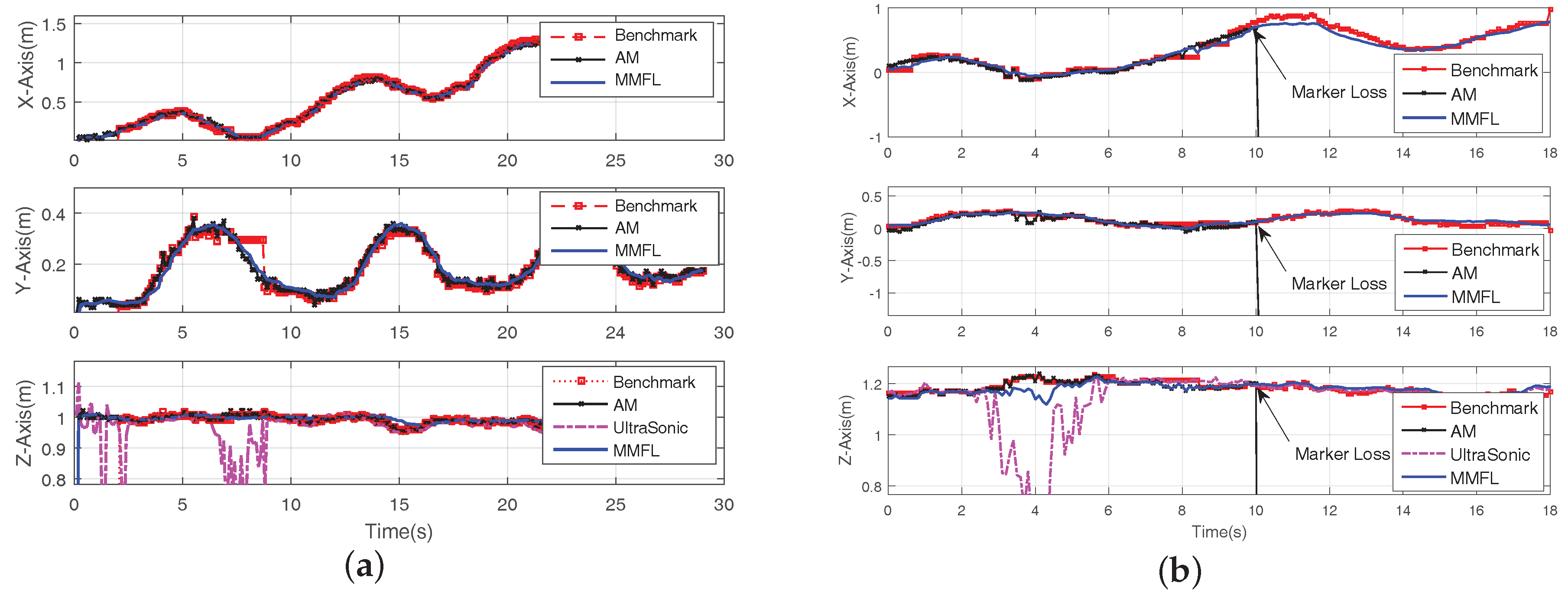
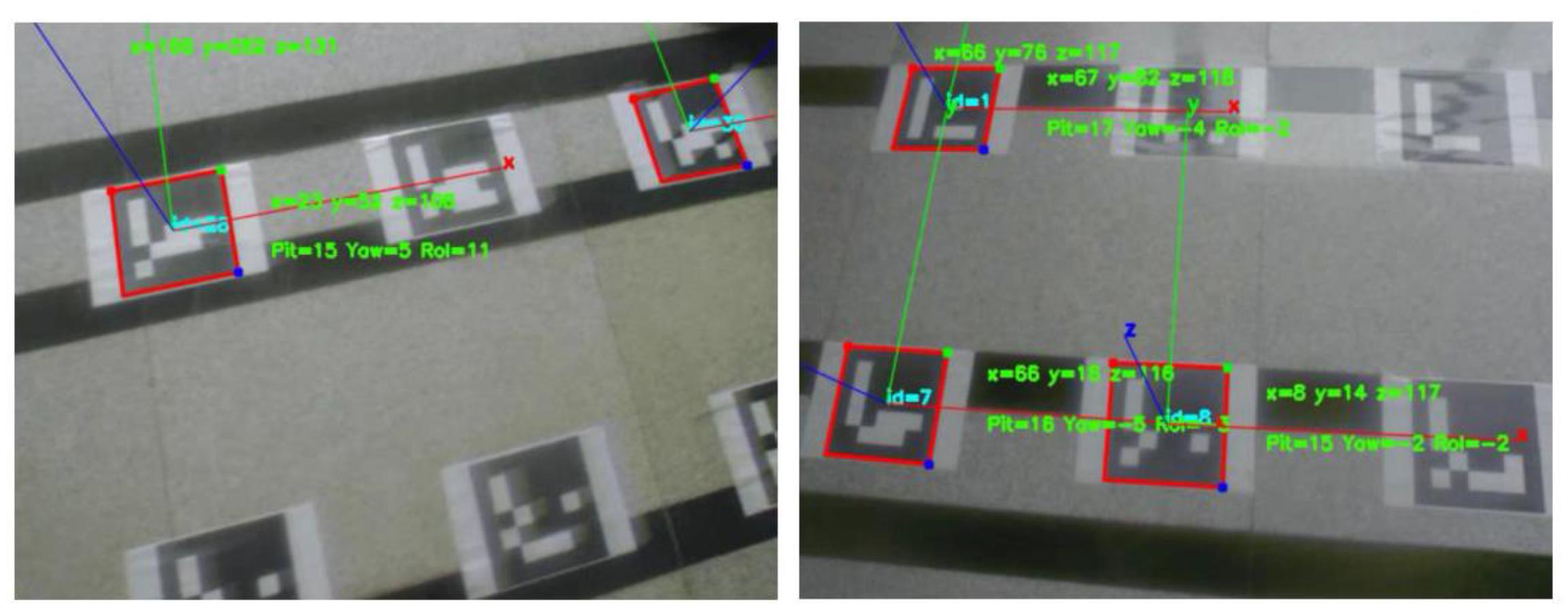
Generally, the ArUco marker can provide precise localization information with less CPU consumption. However, the tilting and shaking of MAV may cause localization errors, discontinuous positioning, even miss detecting since the camera is mounted on it.
Figure 1 shows the cases of abnormal detection caused by shaking and reflecting light, in which most markers can not be detected in these situations and the vertices of the identified markers also have a position error. Therefore, it is straightforward to consider introducing additional sensors to get a satisfying localization result. Thus, a multi-sensor fusion structure combining markers, IMU, ultrasonic and optical flow by the federated Kalman filter is proposed in order to decrease the effect of strong illumination and low quality images.
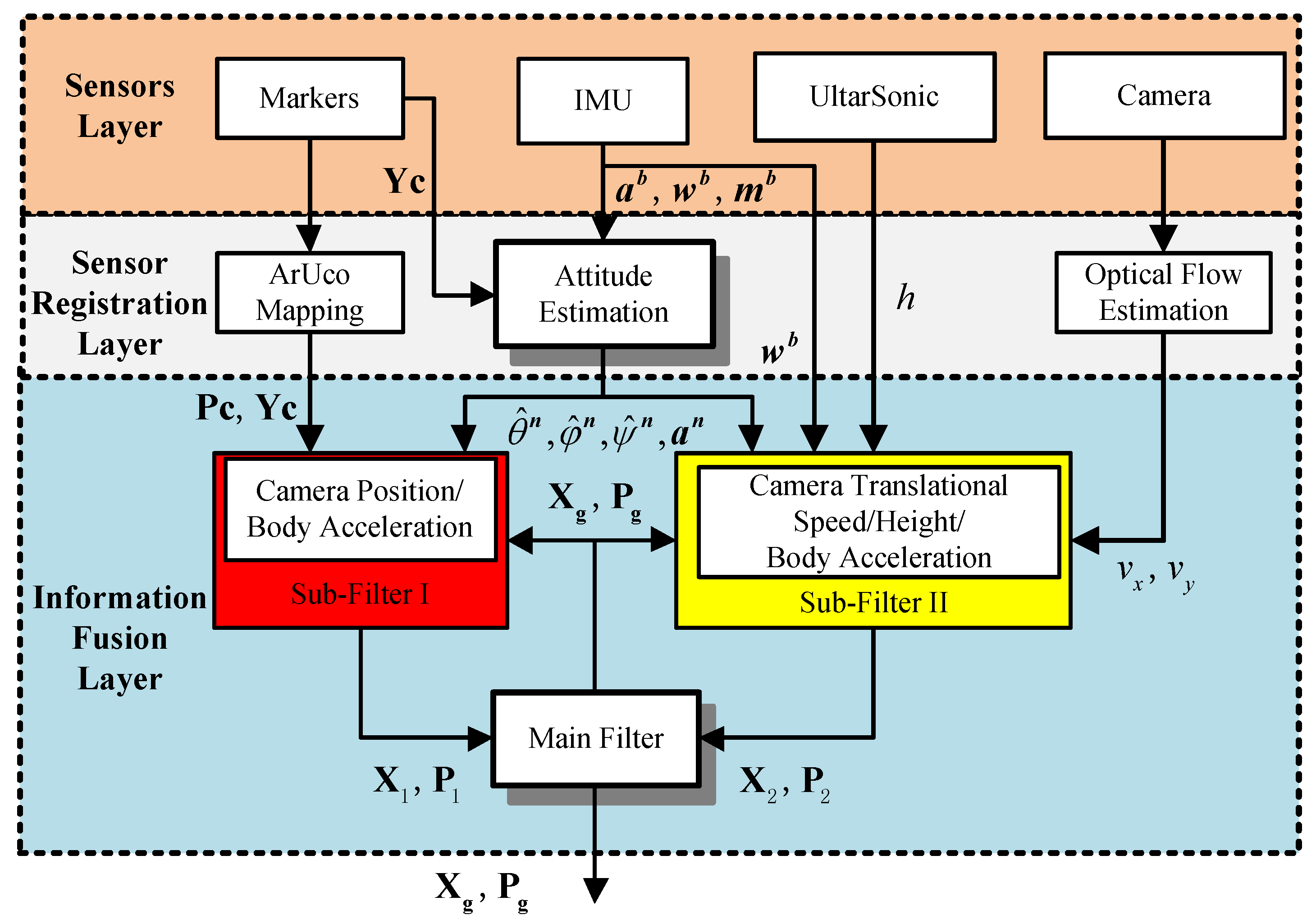
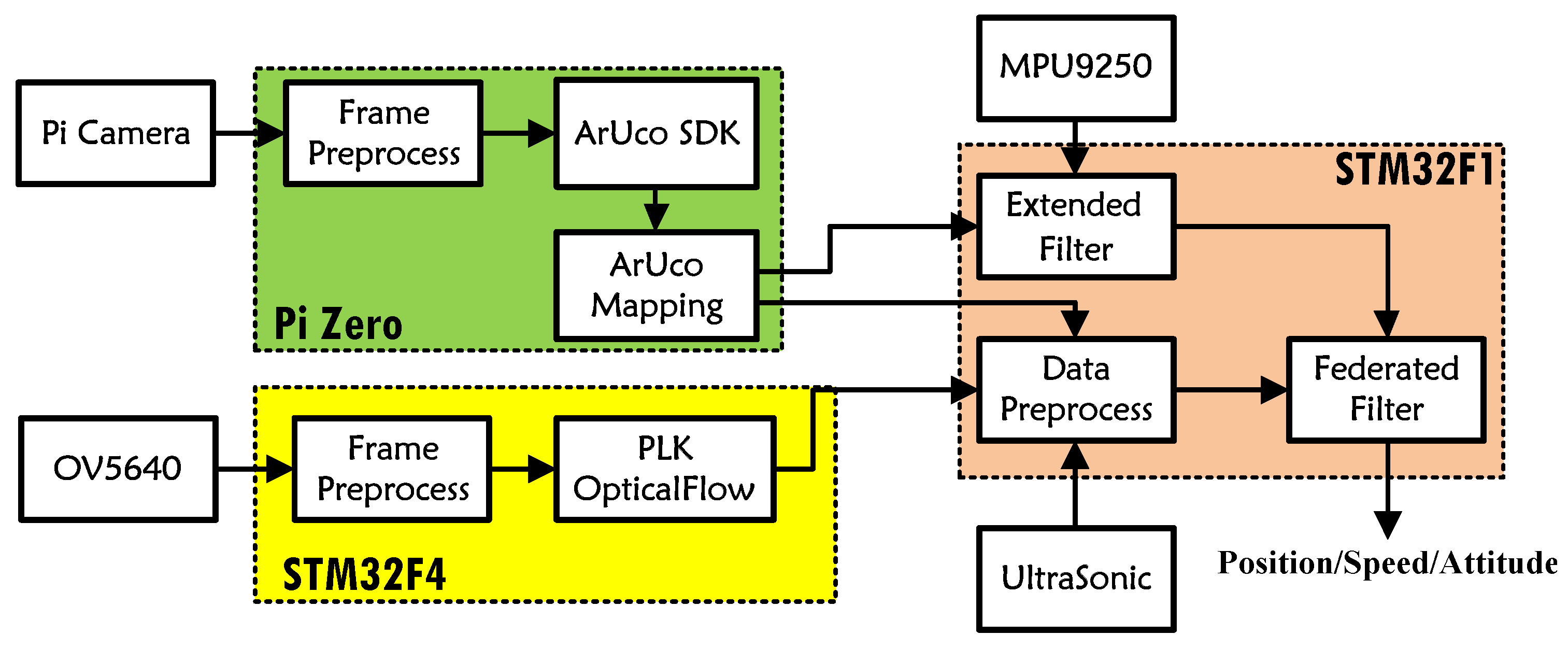
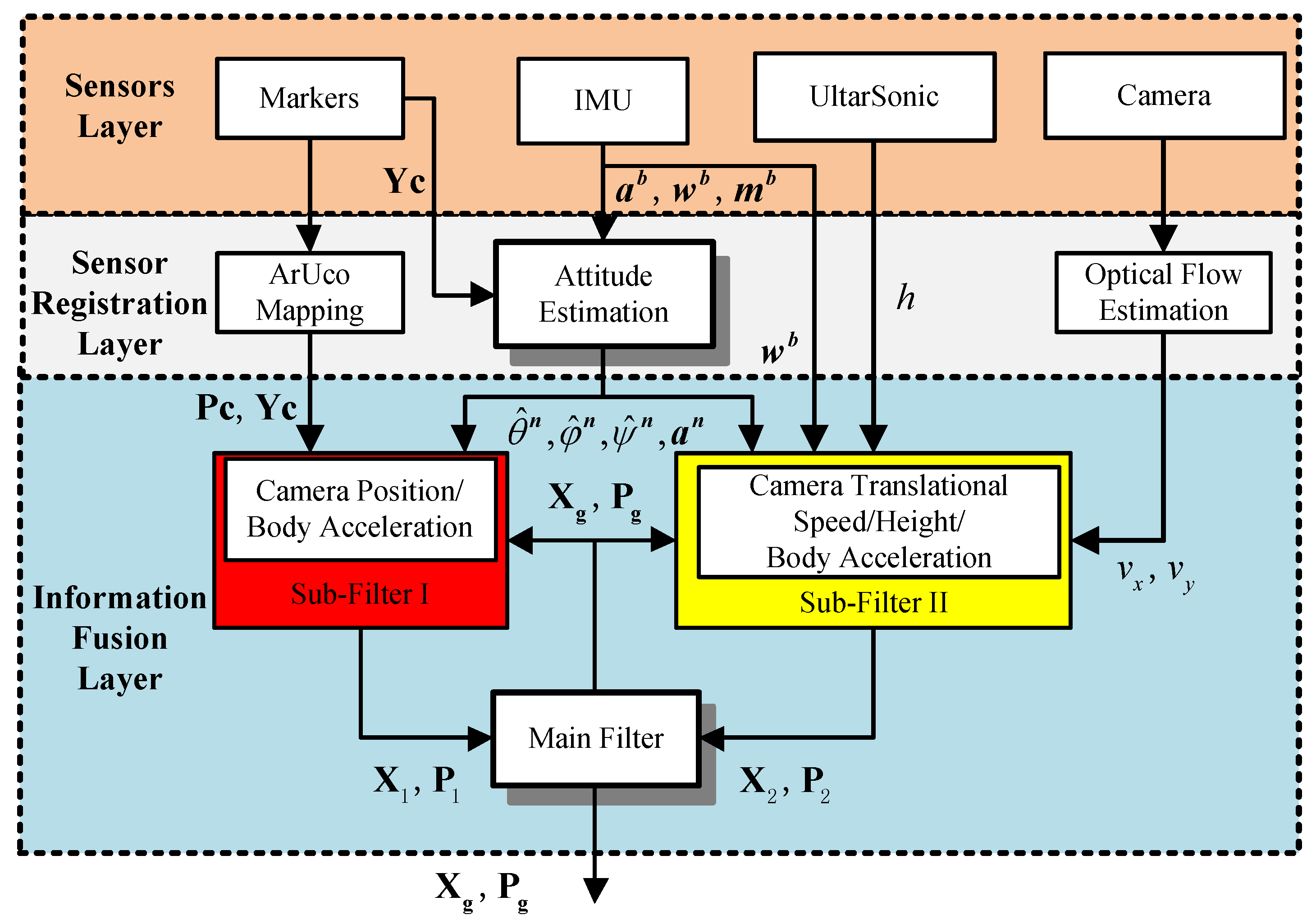
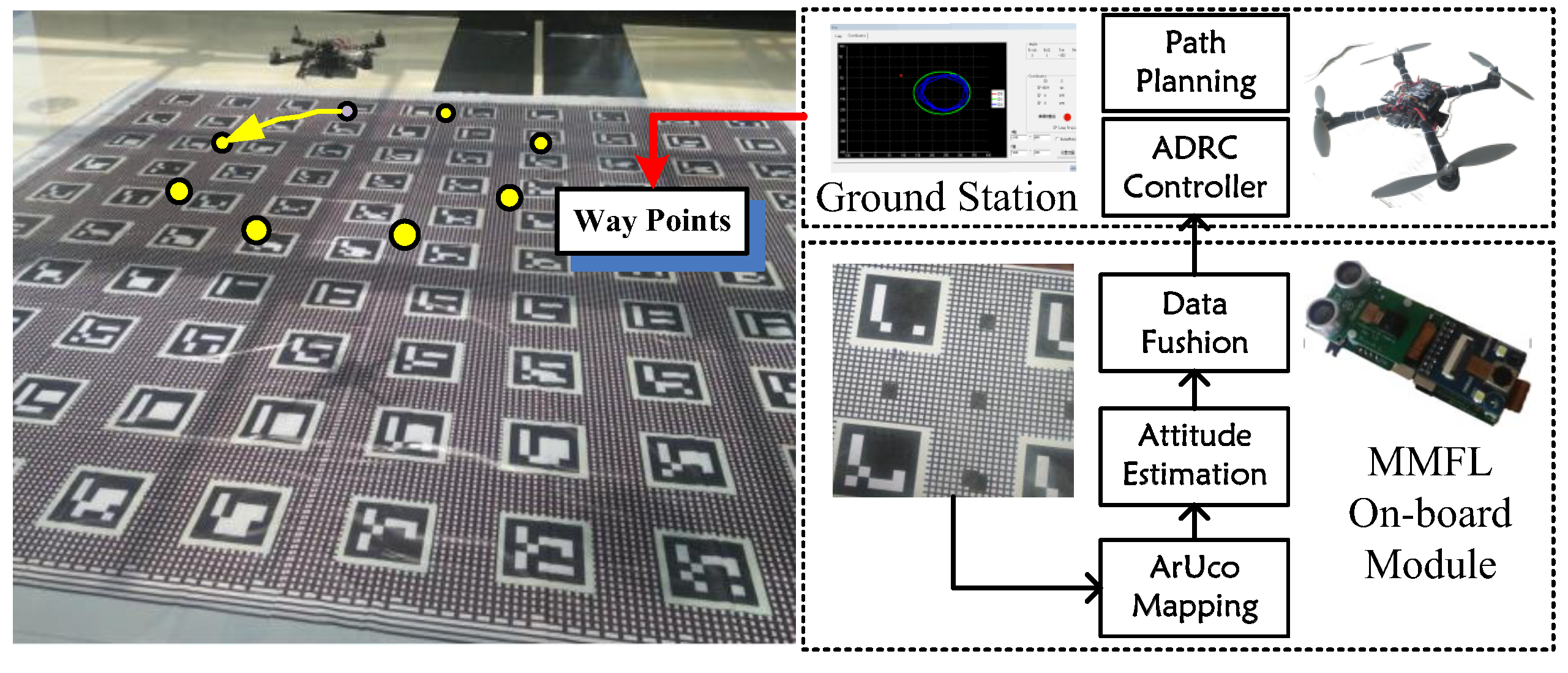
The flow chart of the MMFL system proposed in this paper is shown in
Figure 2. The sensor layer is composed of a variety of heterogenous sensors including markers, IMU, ultrasonic and camera. It is possible to further improve the performance by adding other sensors (such as UWB beacon, barometer or lidar). In the sensor registration layer, the proposed ArUco Mapping module uses an online mapping algorithm to realize the camera localization, the attitude estimation of MAV is based on the EKF [
22], and the pyramid Lucas-Kanade (PLK) optical flow algorithm is utilized to estimate the translational speed of camera. The information fusion layer is realized by a federated Kalman filter (FK) [
23], which contains two sub-filters (SF) and one main filter (MF). The camera position and body acceleration are input SF-I to estimate the position and speed of MAV. The translational speed estimated by optical flow, the height measured by ultrasonic and the body acceleration are input SF-II to estimate the same statement. Finally, the MF synthesizes two SFs’ results for an optimal estimation.
2.1. Visual Algorithms in Sensor Registration Layer
ArUco Mapping: containing 1024 different modified Hamming codes, the ArUco marker [
24] is capable of providing detection, recognition and six-degree-of-freedom (6Dof) information of camera, which is used to give the precise position of MAV in this paper. During location of a large area, a precise map containing the poses of markers is required. The direct way to build this map is to manually calibrate each marker. Obviously, manual mapping is extremely difficult and impossible for an irregular marker array, which is time-consuming and error-prone when calibrating hundreds of markers. A more appropriate way is to automatically build the map with the visual information. Based on this idea, the proposed ArUco Mapping algorithm is described as below.
Define the marker coordinate as
m, whose origin locates at the center of marker, the
y-axis points in the forward direction, the
z-axis goes through the center and the
x-axis points to the right direction. Define the map coordinate as
n, which is coincided with the coordinate of the first detected marker. The state vectors of Marker-
i in coordinate
n include the center position
and orientation
in radian. For the markers are set on the flat floor in this paper so the
of all markers are assumed to be zero. In addition, the camera’s position and orientation calculated by Marker-
i in coordinate
m is
and
, the camera’s position and orientation calculated by Marker-
i in coordinate
n is
,
.
with
It is assumed that the position and orientation of the MAV in map coordinate calculated by each marker are assumed to be same, thus the
and
calculated by two markers should be same in this case. The newly detected Marker-
j’s position
and orientation
in coordinate
n can be calculated by Equations (
3)–(
6) based on the position and orientation of Marker-
i.
The presented mapping algorithm uses the first detected marker to initialize the map
M then the newly detected marker is added into the map gradually. In addition, the position and orientation of each marker is calculated and restored in its own point cloud
. The Grubbs criterion [
25] is used to remove the outliers from point cloud when its size is bigger than
S, then the
K-mean cluster [
26] is adopted to find the center of
K clusters in the point cloud. The most likely center
P*, Y* synthesize each clusters’ center with the corresponding weight, which is determined by the degree of data concentration.
P*, Y* are used to correct the markers’ position
and orientation
in map
M based on step
. After each map correction, a point will be removed from its point cloud if the pose error is bigger than
R and a marker will be “fixed” if the pose error between two revisions is smaller than
F. Finally, the ArUco SDK is used to calculate the camera’s position
and orientation
based on the map. The pseudo-code of ArUco Mapping (AM) is given in the following Algorithm 1.
Pyramid Lucas-Kanade Optical Flow: optical flow is the velocity vector caused by camera movement, which is used to estimate the speed of MAV in this paper. The traditional method for measuring optical flow is the Lucas-Kanade method [
27], which assumes that the image displacement between two adjacent frames is small. Therefore, the disadvantage of this method is that the matched pixel candidates cannot be found in a small neighborhood during fast motion. A common improvement of the LK method is to calculate the optical flow with pyramids, which is known as the PLK method [
28]. The PLK method compresses the size of the image on different pyramid levels, so that the optical flow caused by fast motion can be calculated on the top level. For this reason, the PLK method is able to estimate the optical flow during fast motion. The PLK method initializes the optical flow on the highest level. Set
is the optical flow calculated by the LK method at level
L and
is the predicted optical flow based on the upper level. Thus the updated optical flow of level
L is
, and the predicted optical flow of level
L + 1 is
. Through repeating this method to the lowest level of the pyramids, the final optical flow can be calculated.
| Algorithm 1 Pseudo-Code of the ArUco Mapping Algorithm |
Input:: current map, : point cloud, : set of detected marks, S: size of point cloud, : correction step, L: number of markers in map, N: number of detected markers, K: number of cluster, R: culling threshold of point cloud, F: marker fixed threshold
Output:: markers’ position in map, : markers’ orientation in map, : camera’s position, : camera’s orientation;
- 1:
Map initialize: initialize the map coordinate by the firstly detected marker - 2:
ifthen - 3:
for to N in do - 4:
if not in then - 5:
for to N do - 6:
if in and then - 7:
Add the newly detected Marker in to map: Calculate and by Equations ( 3)–( 6) and initialize ; - 8:
end if - 9:
end for - 10:
else - 11:
for to N do - 12:
if in and then - 13:
Point cloud sampling: Calculate and by Equations ( 3)–( 6) and add it into ; - 14:
end if - 15:
end for - 16:
- 17:
Remove outliers: = Grubbs(); - 18:
- 19:
Find the center of the point cloud: - 20:
The center of each cluster: K-means; - 21:
for to K do - 22:
Calculate the lumpiness of , based on the average distance between all points and the centers; - 23:
end for - 24:
Find the maximum value of lumpiness ; - 25:
Calculate the final center and orientation of the point cloud ; - 26:
- 27:
Map correction: Use to modify , with step ; - 28:
- 29:
Point cloud clipping: - 30:
for to all points in do - 31:
if then - 32:
Remove this point from ; - 33:
end if - 34:
end for - 35:
- 36:
Fix marker: - 37:
if then - 38:
Fix this marker in map and do not correct it later; - 39:
end if - 40:
end if - 41:
end for - 42:
- 43:
Calculate Camera position: - 44:
for to all in do - 45:
Calculate and by Equations ( 1) and ( 2); - 46:
end for - 47:
calculate the average value of as , calculate the average value of as ; - 48:
end if
|
Since the camera faces the ground, the rotation of pitch, roll will generate the rotating optical flow, which can be compensated with IMU to reflect the real translational speed. Define the body coordinate as
b, which is a non-inertial coordinate system associated with the vehicle’s center of gravity. The
x-axis points in the forward direction, the
z-axis down through the vehicle and the
y-axis completes the right-hand coordinate system. Set
,
as the average of the final optical flow calculated by the PLK method, the compensated optical flow
,
can be calculated as below.
where
and
are the angular speeds measured by the gyroscope.
is the number of image rows,
is the number of image columns,
is the field of view and the translational speed of camera is given as below:
where
h is the distance to the ground level given by the ultrasonic sensor.
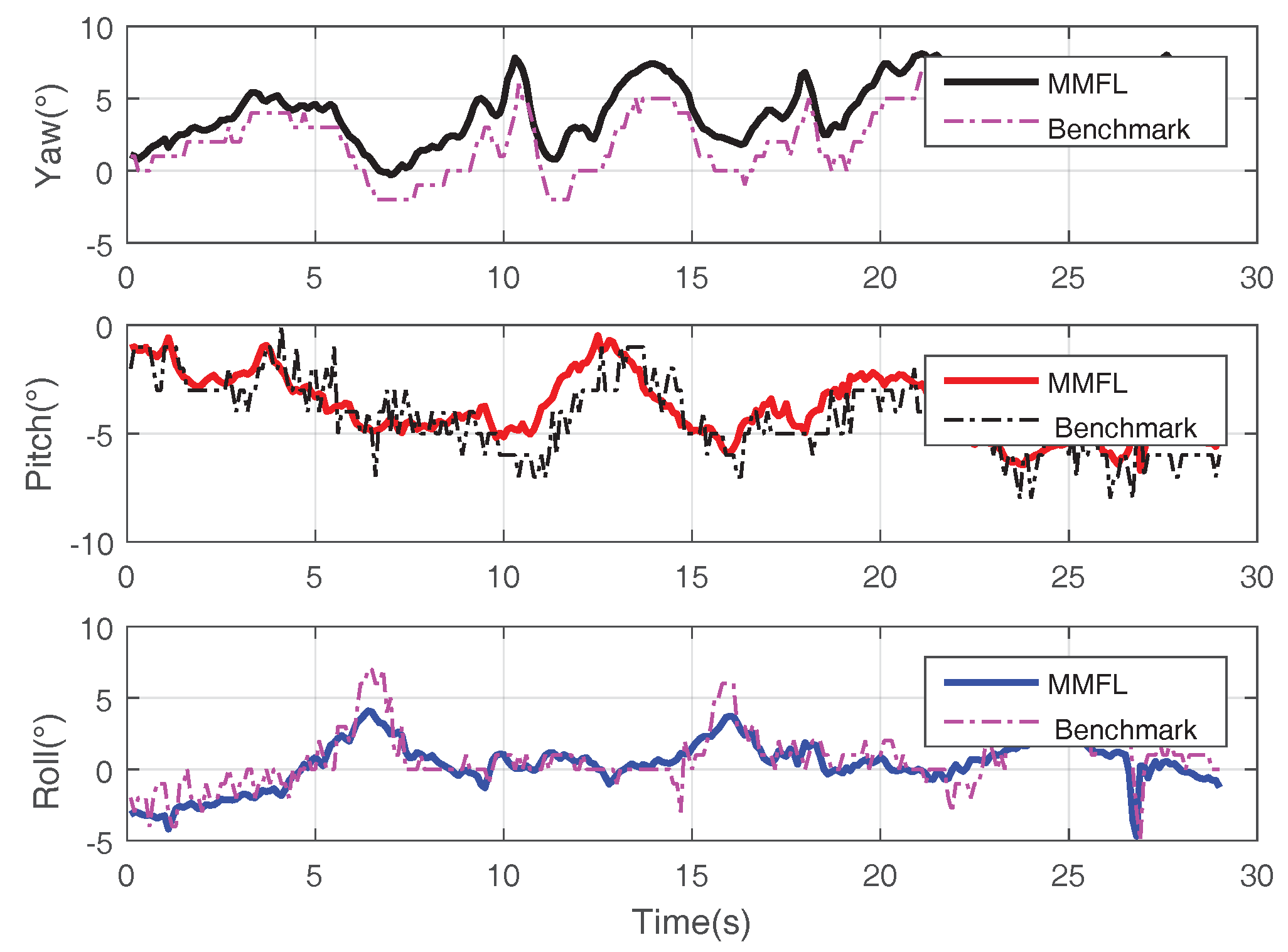
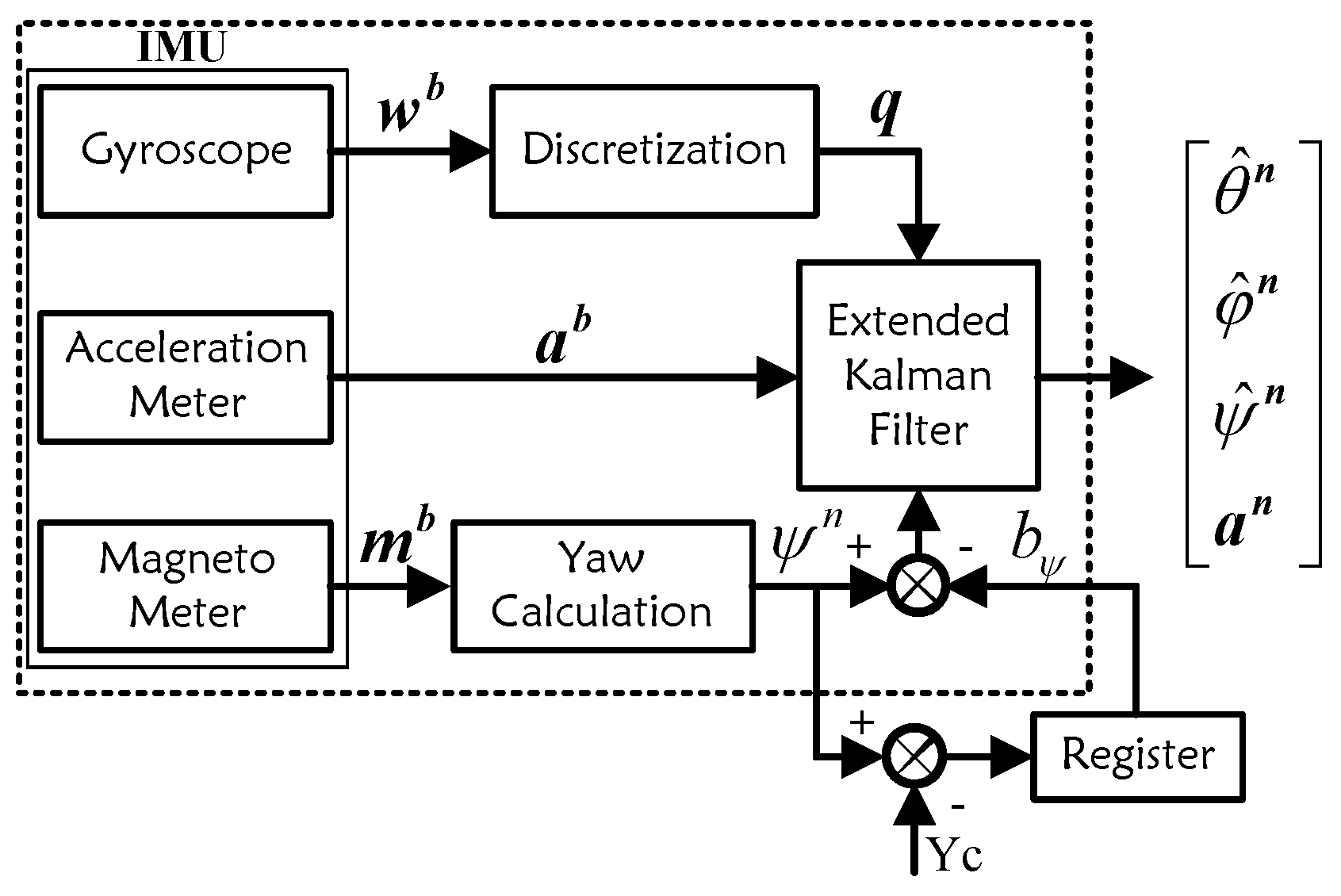
2.2. Attitude Estimation Module in Sensor Registration Layer
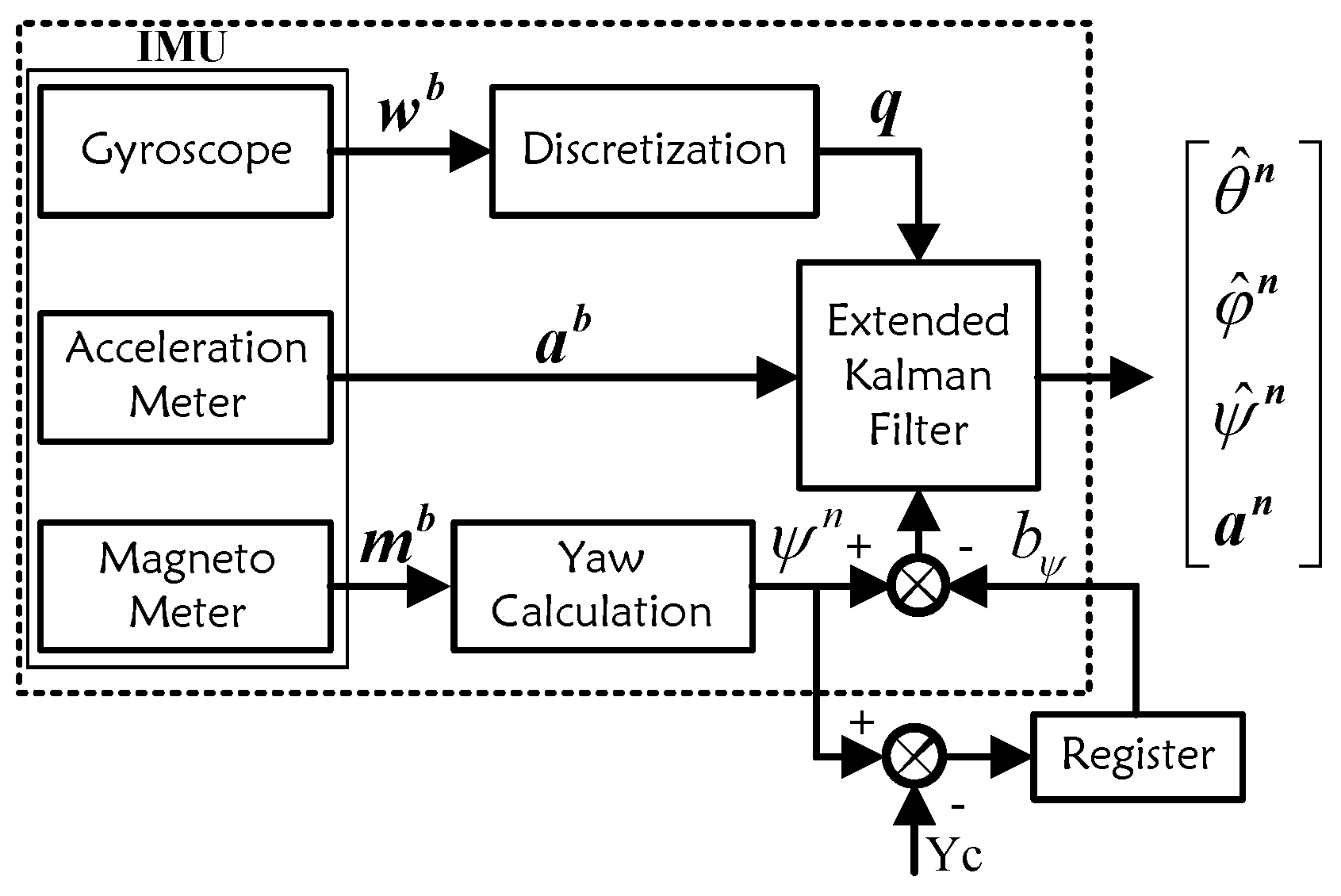
Figure 3 shows the flow chart of the attitude estimation module in sensor registration layer, and an IMU includes 3-axis gyroscope, 3-axis acceleration meter and 3-axis magneto meter is used here.
is the angular speed measured by gyroscope,
is the body acceleration measured by acceleration meter,
is magnetic field measured by magnetometer,
is the estimated attitude and acceleration in map coordinate
n.
State Model: the attitude estimation is based on the quaternion [
29] and EKF. The state vector
consists of two parts: quaternion and gyro bias, and the system function is given below:
where
,
T is the sample period,
is the identity matrix of appropriate dimension,
is gaussian white noise of system and
.
Measurement Model: the measurement
includes the body acceleration and yaw in map coordinate,
is the yaw in earth coordinate and it can be calculated by the measurement of magneto meter:
In addition, there is a bias between map coordinate and earth coordinate since the map coordinate is initialized by the first detected marker. Define this bias as
and it can be calculated as below:
Therefore, the measurement function is given below:
where
is the measurement noise and
.
Attitude Estimation: the extended Kalman filter equations of the attitude estimation module are given below.
where
is the covariance matrix and
is the Kalman gain matrix,
and
are the system and measurement covariance matrices respectively. As the appropriate matrices
and
cannot be chosen based on classical theories, they are usually tuned experimentally by a trial-and-error method. The Jacobi matrix of the nonlinear system function and measurement function are given below.
where
is the angular velocity after compensated the gyroscope-drift,
,
and
g is the gravity.
Normalization: the quaternion needs to be normalized at the end of each filter cycle. So the final output of the filter is given as below:
where
2.3. Information Fusion of Multi-Heterogeneous Sensors
The information fusion layer is designed to fuse the information received from the upper layers. A federated filter is used here based on the advantage of fusing heterogeneous sensors data, which allows the sensor layer to measure the same states with different sensors (for example ultrasonic and ArUco Mapping can both give the height of MAV). Additionally, it is easy to expand other sensors to further improve the localization precision and provide a good redundancy. The federated filter is comprised of one main filter (MF) and several sub-filters (SF), which is fault tolerant and flexible. The state and covariance matrix of each sub-filter are sent to the MF and the MF fuses the two estimations to get the optimal result.
State Model: A distributed system with controlled input and noise is given as follows:
with
,
, where
T is the sample period,
is the state-transition matrix,
is the controlled input matrix,
is the zero matrix with the appropriate dimension,
is the controlled input,
is the noise drive matrix,
is the gaussian white noise and
. The state vector
includes position, speed, and acceleration bias in the map coordinate.
Measurement Model: The measurement of SF-I is the camera position
, and the measurement function is:
where
,
is the state vector of SF-I,
is the measurement noise for marker, and its covariance matrix is
.
The measurement of SF-II contains the speed estimated by PLK and the height given by ultrasonic. The measurement function is:
where
,
,
is the state vector of SF-II,
is the measure noise vector for PLK and ultrasonic, and its covariance matrix is
.
Information Fusion: the standard Kalman filter algorithm is used in the presented MMFL system since the state and measurement functions are both linear, and the federated Kalman filter algorithm [
23] is given as below:
- (1)
The MF initializes
and
, then uses the positive coefficient
to distribute the information as follows:
where
represents the estimated state vector of each sub-filter,
and
represent the corresponding estimated state covariance and process noise covariance, respectively. The coefficient is subject to
and
.
According to Equations (
32)–(
34) the federated filter allocates the global estimation to each SF based on
, and a smaller information coefficient means less use of the global estimation. For example, the global estimation is average allocated between each SF when
[
30]. To make the filter more adaptive, the presented algorithm adopts the variance matrix’s Frobeniuse norm of each SF as the distribution coefficient since the fixed information coefficients can not reflect the accuracy change of SFs. Therefore, a better accurate SF can allocate a larger information coefficient and have a great contribution to the global estimation [
31].
where
.
- (2)
The state prediction of SF-I and SF-II is implemented independently.
- (3)
SF-I and SF-II use the measurement to update the state estimation, respectively.
- (4)
The MF fuses the estimations of the two SFs to obtain the optimal result.
A special case is that the markers cannot be detected when MAV is taking off, landing or flying at a low height. To make the filter work properly in those situations, the local estimation of SF-I will be blocked to MF. Thus, the global estimation is
, and the measurement prediction of SF-I is
. Besides, the measurement delay to IMU can be handled by the ring-buffer scheme proposed in [
32] for each SF.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}