1. Introduction
In the last few decades, electric drives have become more important with the increase of machinery electrification and electric vehicles. Moreover, in Railway applications, the availability of the traction drive is directly linked to the availability of the complete system, as a train could stop in case of a failure in the traction drive. Maintenance activities have an important influence on the availability of the system, being an ideal maintenance the one which prevents a failure [
1], based on the health of the system. A Fault Diagnosis is needed in order to detect faults and implement a Condition-Based Maintenance.
Fault diagnosis functionalities or tools can differentiate between some industrial applications and companies from others. With fault diagnosis, we refer to the sequence of actions needed to detect, locate, and identify the fault mode in a system. Moreover, the severity of the fault can be obtained. This is known in the literature as Fault Detection and Diagnosis (FDD) [
2,
3]. If the fault is only being detected and located, the approach is called Fault Detection and Isolation (FDI) [
4]. In this case, the specific fault mode or the severity is not established.
Different FDI approaches have been presented in the literature. In [
5], a classification between model-based and model free approaches is done. Quantitative model-based FDI approaches, also referred as Model-based FDI, are based on an analytical redundancy, so the measured value is compared to a value obtained from the model. The difference between both values is called residual, and it should be close to zero in fault-free cases. A comparison among the different Model-based FDI approaches is presented in [
6].
In this research, on-board Model-based FDI approaches are proposed and implemented in a commercial Traction Control Unit (TCU) for a tram. In complex systems, a fault can concern several signals, being a Model-Based FDI a suitable solution to improve detection sensitivity [
7]. The model of the traction drive is already available, as it is defined at the beginning of the design phase for performance simulation, so a Model-based FDI can be validated during this period too. In addition, the design of FDI approaches based on models can benefit from the knowledge and models gathered during the common design phase of the system.
On the other hand, as model-free approaches need a large quantity of historical data, on-board diagnosis has limitation due to computational requirements [
8]. On-board diagnosis is closer to physical systems, improving the diagnosis celerity and reducing the data communications costs. Moreover, in moving systems, the communication to remote diagnosis cannot be executed at high frequencies and on-board data storage is limited. Thus, this research is focused on Model-based FDI approaches implemented in a commercial TCU for a tram.
Once a fault occurs, system performance deteriorates from the nominal zone to the degraded zone. Thus, a Model-based FDI for early detection of faults in traction drive elements, before the system passes from degraded mode to failure, is an important point to increase the availability and reliability of the system. The types of faults in traction drives can be classified as sensor, actuator, and process faults [
9]. Fault Detection and Isolation (FDI) approaches have been implemented in electric drives, mainly for sensors [
10,
11], electric machines [
12,
13] and power converters [
14,
15]. Traction control strategy needs the sensor feedback for properly operation, so a faulty sensor can suppose a loss of availability and performance deterioration [
16]. This research is focused on sensor fault detection and isolation in a traction drive.
In [
9] a review of FDI methods for sensor faults in aerospace applications is presented. Recently, an integrated diagnosis for aerospace application was presented in [
17], which includes a sensor fault diagnosis and performance degradation estimation. There are several recent publications in sensor diagnosis for different applications in electric and hybrid vehicles [
18,
19,
20], mainly in order to increase safety and availability. However, the publications in Railway systems are reduced and limited to test benches without commercial control units, observer-based FDI for sensor faults are proposed in [
2,
21,
22].
The aim of this article is to propose an integral FDI solution for sensors in a Railway Traction drive, based on different FDI approaches. The applied approaches do not imply any hardware change. Railway applications are not safety-critical systems as aerospace systems. In aerospace applications, it is critical to react instantaneously to the fault, in order to activate a fault tolerant solution. On the other hand, in Railway applications, the control system can stop and restart the traction unit in seconds maintaining the motion of the train. Thus, the proposed approaches in this article for Railway application should be evaluated during a short time period in order to confirm the fault detection.
The most suitable FDI approach for each sensor has been selected, based on the following factors: algorithm complexity, hardware and software resources available in the traction drive, tuning difficulty due to parameter variation/uncertainties and reliability. A simple model for an observer, avoiding several motor parameter variation during operation [
23], the available hardware redundancy and low computational algorithms, which can be executed in the TCU without demanding an increase of the execution period, are the preferred choices.
Among the FDI solutions for DC-link voltage and catenary current sensor, an observer-based FDI approach based on the input filter is proposed. In [
21], a similar solution is presented, as an adequate solution for real time implementation, which avoids problems in the modelling of the power converter or the need of a FPGA-based FDI [
24], allowing an easier implementation in the Digital Signal Processor available in the TCU. In [
25], an Extended Kalman Filter is implemented for FDI, based on induction motor model. The author concludes that the performance of the approach deteriorates at very low speeds and it is affected by parameter variation. The proposed solution in this article does not require demanding hardware and software resources for real time implementation, due to the simplicity of the model of the input filter, in comparison to models including a power converter or an electric machine. Furthermore, among the observer-based approaches, Luenberger observer could be more adequate for industrial applications due to the possibility to simplify its algorithms [
26]. In conclusion, the proposed solution is justified due to lower algorithm complexity, lower parameter variation and uncertainties of the input filter in comparison to more complex motor model, capability of the TCU and reliability of Luenberger observer.
In the Railway Traction drive studied, only two phase measurements are available. Thus, low computational cost FDI approaches for phase current sensor, such as those based on the sum of three current measurements cannot be applied [
27]. There are few studies with just two phase measurements which analyze offset and gain faults, as is summarized in [
28]. This work proposes a bank of observers for an induction motor based drive, using a Sliding Mode Observer and a High Gain Observer. In [
29] a Sliding Mode observer is proposed for phase current sensor fault reconstruction for a Permanent Magnet Synchronous motor based drive. Both research works use the motor model and they assume that motor parameters are known and constants. On the other hand, in [
30], a compensation of the oscillation generated due to phase current sensor fault is presented. Moreover, the frequency of the oscillation allows to the ability to distinguish between offset and gain fault. The extraction of the oscillation can be done by applying to current components
and
, a low pass filter and a passband filter. The passband filter will be centered in the fundamental frequency of motor stator current for offset faults, or at twice this frequency for gain faults. Despite the limitations of this approach, as it is not possible to isolate faults between both phase current sensors, it allows to reutilize filters and control strategy algorithm already implemented in the traction control unit. Thus, it requires lower computational resources compared to the aforementioned observer-based approaches. On the other hand, as it does not depend on the motor model, it does not need an online motor parameter adaptation to avoid performance deterioration, as these parameters change during operation [
23]. In conclusion, the proposed solution is considered the most suitable for the Railway Traction drive, due to lower algorithm complexity in comparison to a bank of observers or a Kalman filter, the reutilization of available control and filter algorithms, capability of the TCU, and the reliability of the detection.
Finally, in case of the speed sensor, due to the hardware redundancy already available in the Railway Traction drive configuration, observer-based FDI approaches for speed sensor faults [
31], have not been implemented. Mainly, due the reliability of the hardware redundancy, being the detection decoupled from parameter variation and uncertainties, as well as the low computational cost and TCU capability, the solution based on hardware redundancy has been proposed.
Previous works in sensor FDI in Railway applications have been validated in simulation [
2,
32] or in an experimental test bench [
21,
22], but without commercial TCU, and they do not include all the sensors installed in a railway traction drive.
In contrast to previous works, a commercial Railway control unit was used for Hardware-in-the-loop simulation (HIL). The HIL platform is composed of a Real Time Simulator and a Traction Control Unit (TCU) for a Railway application. The TCU is a commercial unit for a tram developed by CAF Power & Automation (Spain). Thus, the FDI algorithms were implemented together with the same control software utilized for a real tram application.
The paper has the following structure:
Section 2 presents the Railway traction drive description and problem statement.
Section 3 presents the integral sensor fault diagnosis structure.
Section 4 proposes a FDI approach for DC-link voltage and catenary current sensors.
Section 5 presents a FDI approach for motor phase current sensors. In
Section 6, an approach for speed sensor based on hardware redundancy is presented. In
Section 7 the validation in a HIL platform is presented. Finally, the discussion and conclusions are given.
3. Integral Sensor Fault Diagnosis Structure
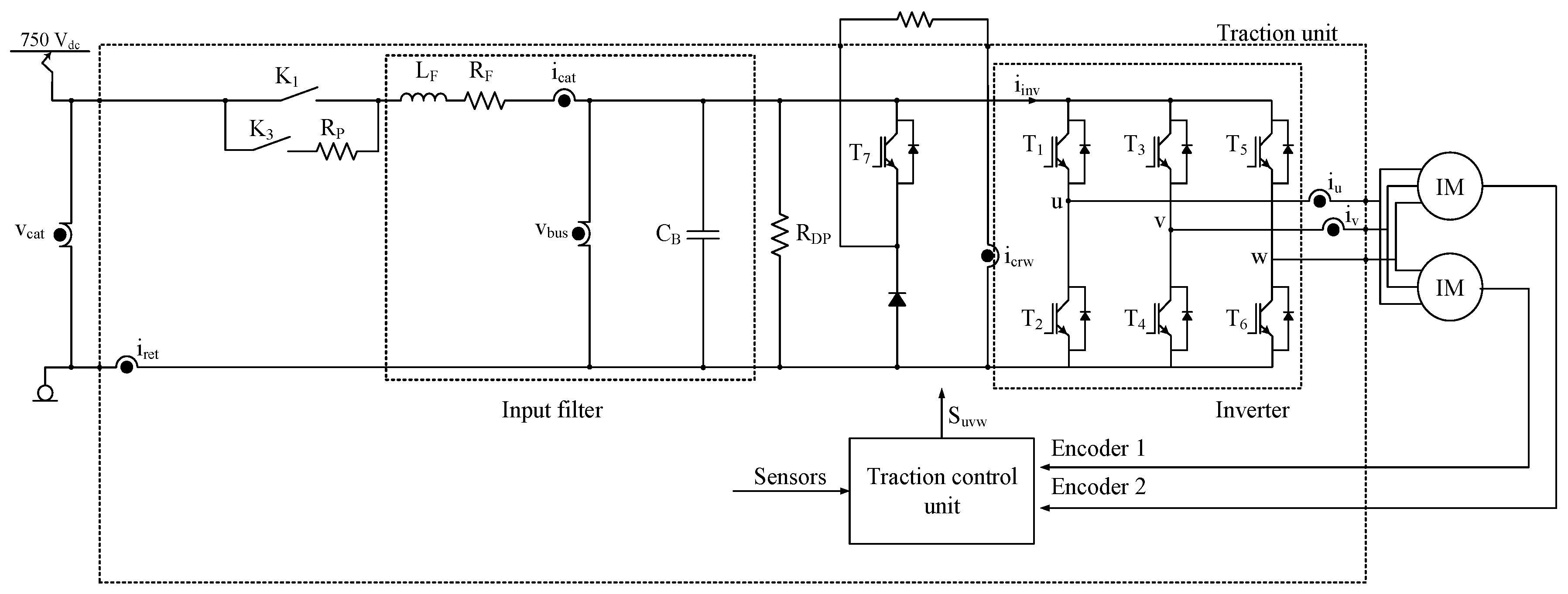
The proposed Integral Sensor Fault Diagnosis strategy provides the most suitable solution for each sensor, based on the architecture of the traction unit shown in
Figure 1. In some cases, the addition of an additional sensor might be a new solution, more suitable, but it can have drawbacks too, due to new hardware or software requirements for the Traction control unit. Thus, approaches which provide analytical or hardware redundancy without hardware changes are proposed.
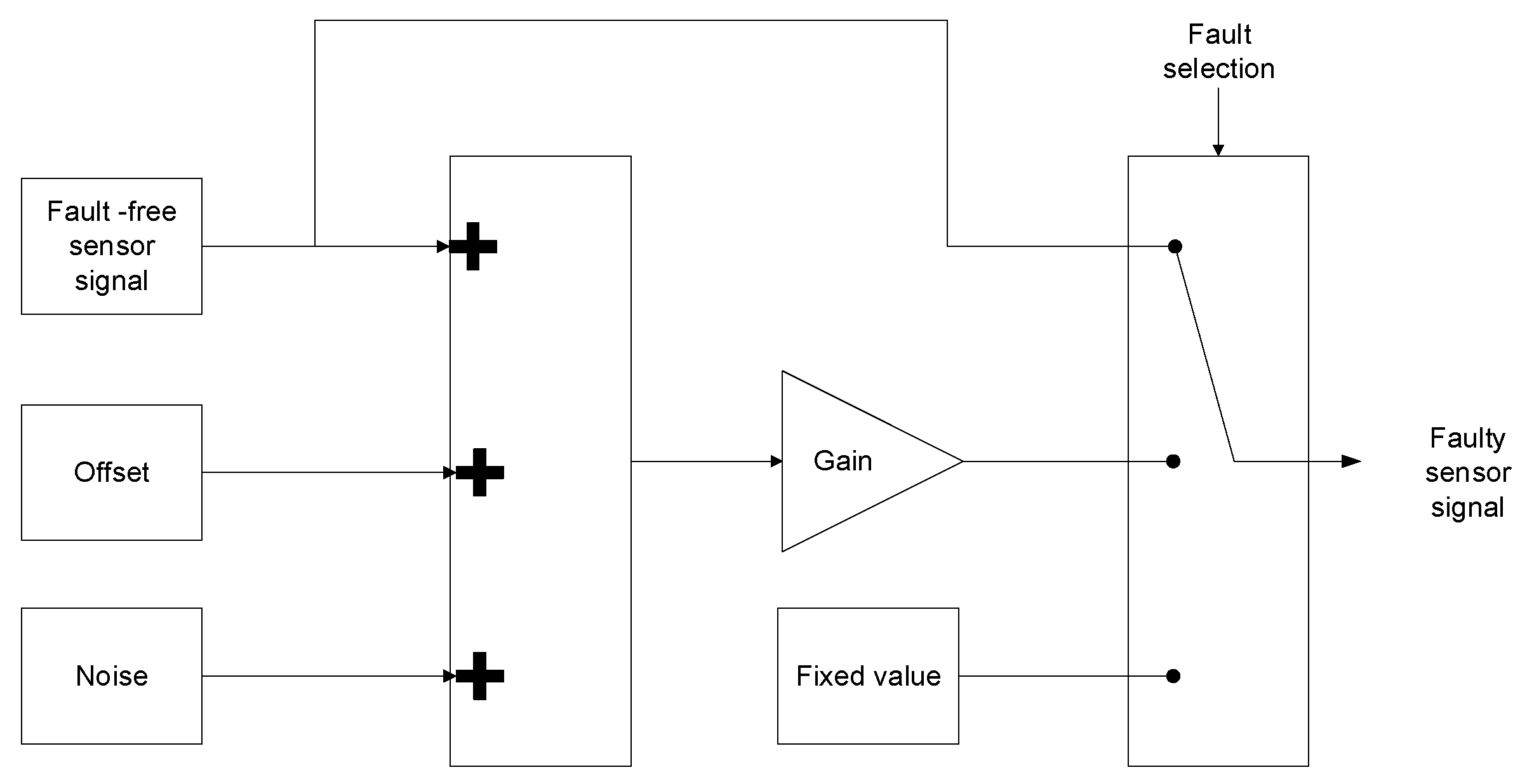
Among the several FDI strategies developed for the traction drive, the ones presented in this article are shown in
Figure 2, and explained in following sections. These strategies are centered in the FDI for DC-link voltage, catenary current, motor phase current and speed sensors. Solutions for the rest of sensor (catenary voltage, return current, and crowbar current) are not discussed here, as they are based on similar FDI approaches. Catenary voltage sensor faults can be isolated using hardware redundancy, since more than one sensor is installed in the train. Return current sensor faults are isolated using the redundancy with catenary current sensors. Finally, crowbar current sensor fault detection can be performed during braking with the observer based FDI approach presented in
Section 4. With the combination of different FDI approaches, sensor faults can be isolated.
The different FDI strategies are executed in parallel. A suitable feedback gain selection for observer based FDI, makes residual for detecting catenary current sensor faults sensitivity low to DC-link voltage sensor faults, and residual for detecting DC-link voltage sensor faults sensitivity low to catenary current sensor faults. Thus, both residuals are decoupled.
In order to avoid any false detection, as observer based residual sensitivity depends on observer gains selection, a procedure is proposed to implement the integral diagnosis strategy for FDI in current and voltage sensors.
The estimation of fault severity is not deeply described in this article. In case of current and voltage sensors faults, a previous fault injection and analysis, for developing an enhanced Failure mode and effects analysis (FMEA) is needed [
33]. This analysis links the amount of deviation of the sensor with the root failure mode. Then statistical tools as likelihood ratio are applied in order to estimate the fault severity.
5. FDI Approach for Phase Current Sensors
With regard to phase current sensor FDI in electric drives, in [
39] a bank of observers is proposed. Each observer has just one of the phase current sensors as input, so based on the estimation, it is possible the detection and isolation of faulty sensor. In contrast to this application, the system under study in this article uses only two phase current sensors, and the third current is calculated from the other two. Another bank of observers is proposed in [
40] for a Double Fed Induction generator, normally used in wind turbines. In this case, only two phase currents are measured, but rotor current measurements are needed for stator current estimations, and stator current measurements for rotor current estimations.
On the other hand, in [
40] a FDI approach based on the analysis of the probability density functions (pdf) of the sensor current signal is proposed. A phase current sensor fault generates a change in the pdf of
current, obtained from the application of the Park transformation.
Finally, in [
30,
41] a compensation of the phase current sensor fault effect is proposed. Based on the frequency of the oscillations generated due to the sensor fault, it is possible to distinguish offset and gain faults. These approaches do not allow the fault isolation, but there are not dependent on motor model.
Based on the actual traction drive configuration, where only two phase current sensor are available and there is not any phase voltage sensor, the approach selected in this work was the analysis of the oscillations in the current components and , generated by offset and gain faults. This approach is simple compared to other strategies, which are dependent on the model of the motor and parameter variability. Moreover, and are already calculated for the control strategy of the traction motor. The only shortcoming is that it is not possible to isolate the faulty phase current sensor, and both sensors should be checked to complete diagnosis.
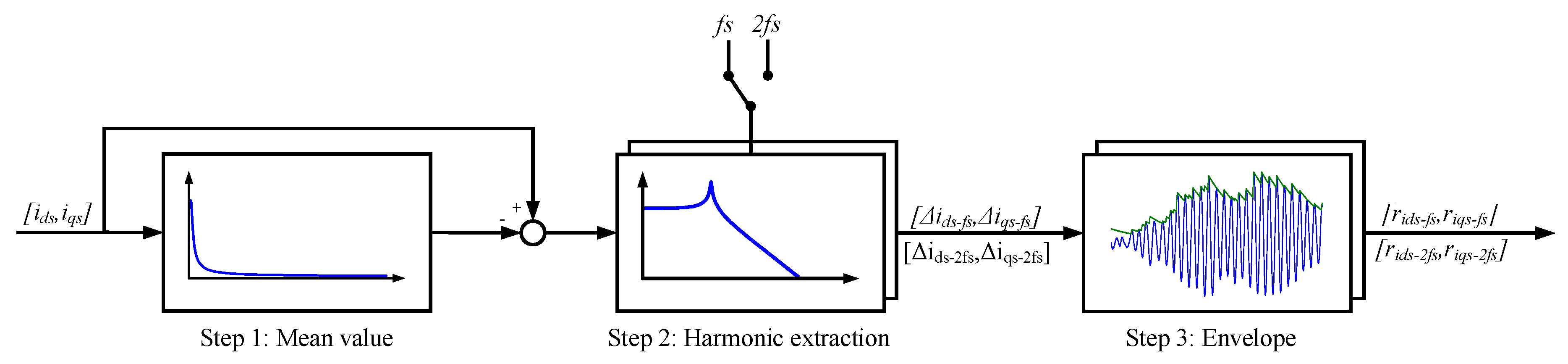
The residual generation process is divided into three different steps, as it is shown in
Figure 13. The first step consists in eliminating the average value of the current components
and
. An Exponential Smoother filter (ES) is used for this task [
42]. The filter discrete transfer function is given by (7), being
. It is a recursive filter with an exponential ponderation, decreasing the influence of past samples as time goes by.
The second step is based on two passband filters [
42], centered in
and
, being
the fundamental frequency of motor stator current, which is obtained from flux and torque estimation. From previous analysis [
30], it is known that offset deviations produce an additional oscillation in the current components
and
, at
. Gain deviations generate the oscillation at
Due to the oscillation generated, the first one allows to detect offset faults, whereas the second one detects gain faults. The discrete transfer function of the passband filter is given by (8), being
and
b, parameters to calculate in function of bandpass and sample frequency. Finally, the oscillation envelope is obtained in step 3.
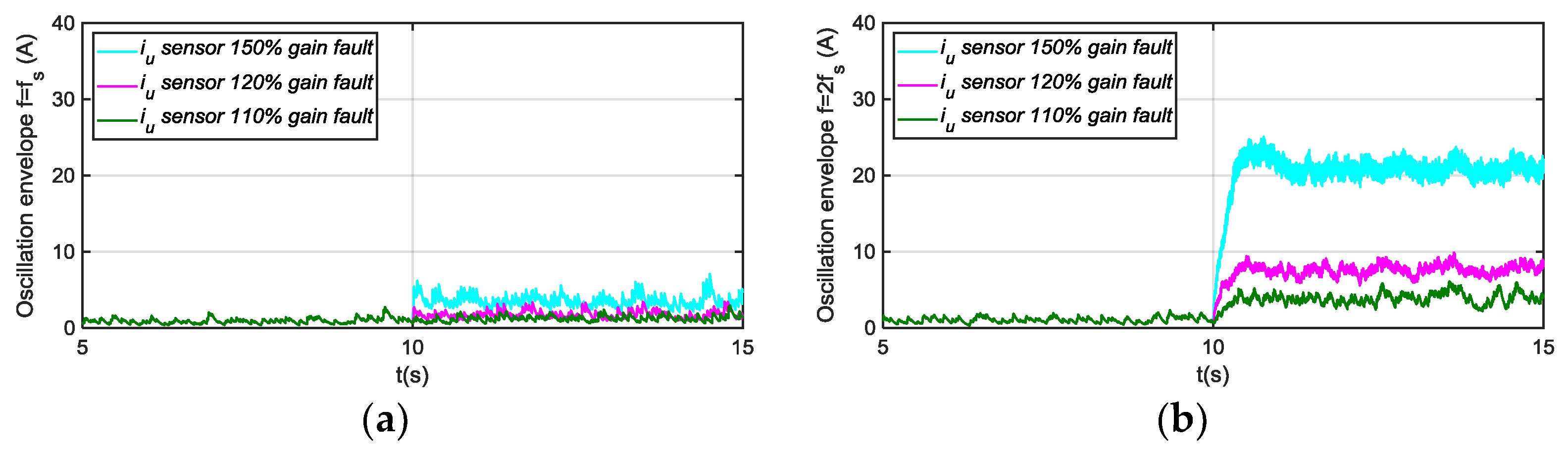
The residuals generated for different motor phase current sensor fault modes injection are shown next, being the references for torque and speed 600 Nm and 600 rpm, respectively. In
Figure 14, the residuals based on a passband filter centered in
, and
for offset fault in sensor
are presented. The residual based on a filter centered in
, is able to detect injected offset faults, whereas the residual based on
is not sensitive. As it is shown in
Figure 15, the residual based on a passband filter centered in
, is able to detect gain faults in
sensor, whereas the one based on a filter centred in
, is not sensitive.
The fault severity estimation should be done as it was explained in previous sections, using information obtained from FMEA analysis and statistical tools.
7. Hardware-in-the-Loop Validation for FDI Approaches
The HIL platform used for validation is composed of a Real Time Simulator, from OPAL-RT Company, and a commercial Traction Control Unit, develop by CAF Power & Automation, for a Railway application, as it is shown in
Figure 17.
The TCU is externally connected to the Real Time Simulator through analog and digital ports. Conditioning modules to adapt the inputs and outputs between TCU and Real Time Simulator are needed. This platform allows injecting faults, easily and quickly, in order to test the different FDI approaches.
The simulation step for model running in the Real Time Simulator is 15 µs. The TCU has a DSP for high speed execution. The sensor measurements are captured and monitored every 120 µs for validation purposes.
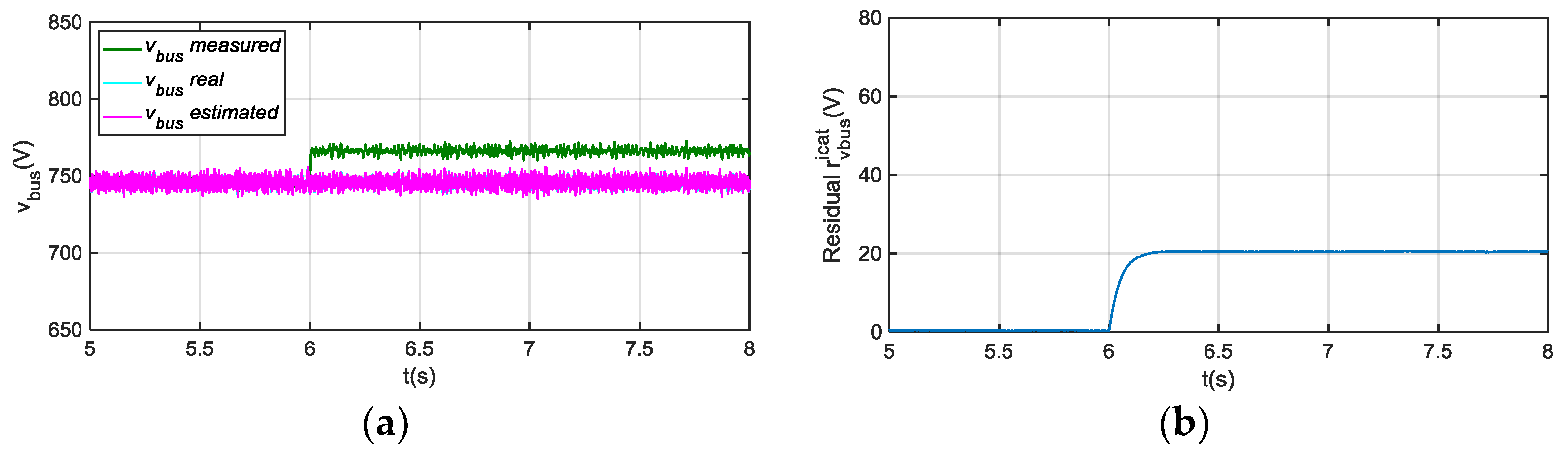
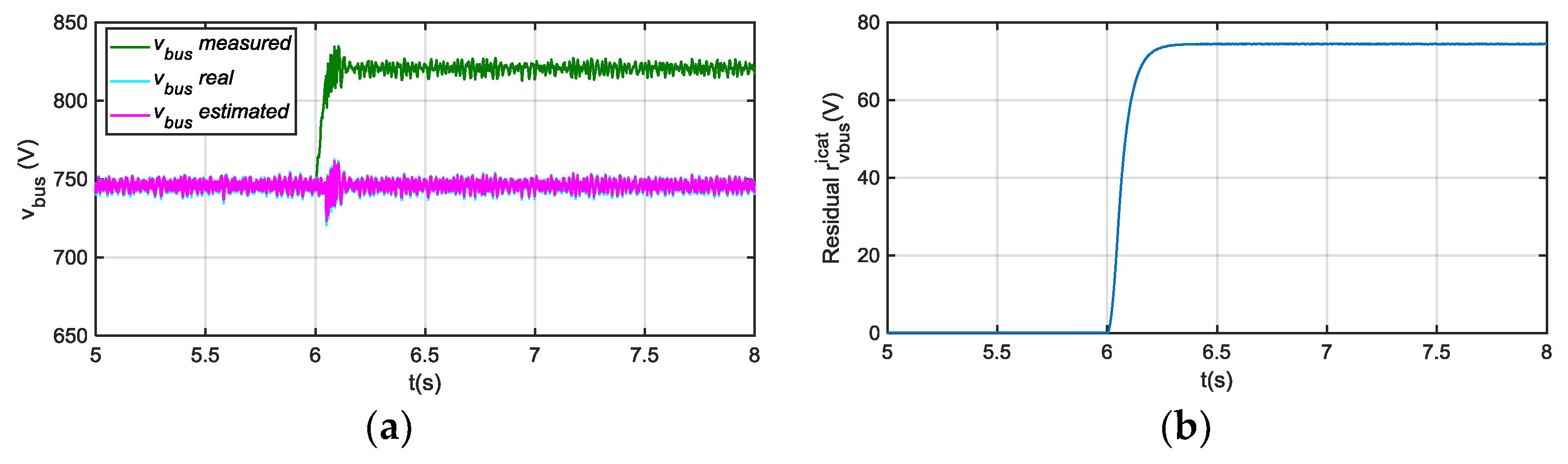
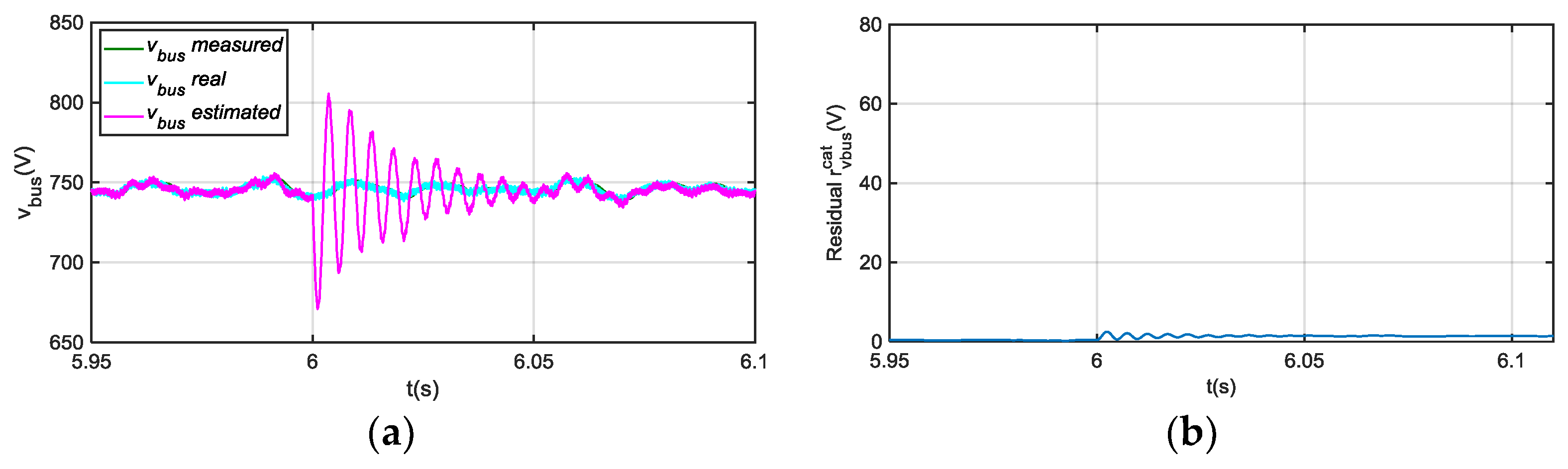
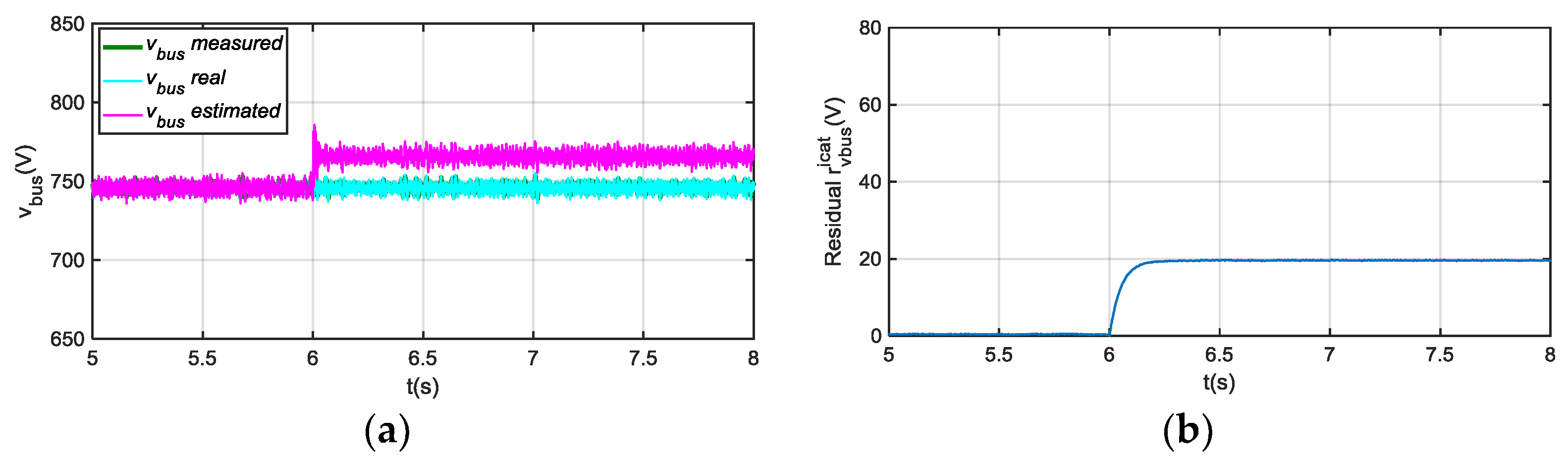
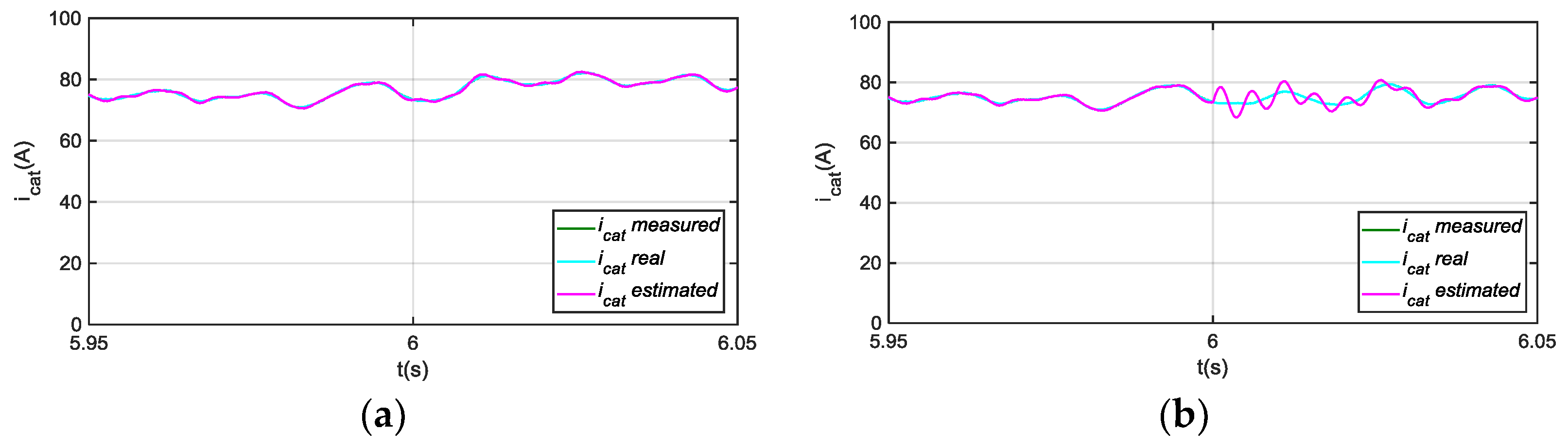
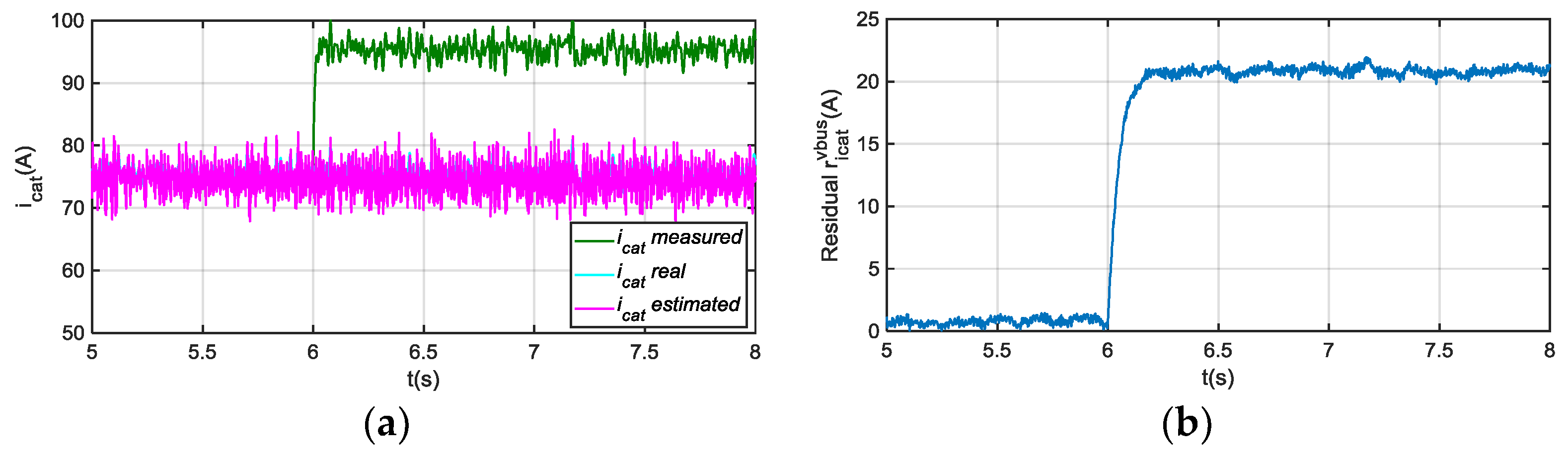
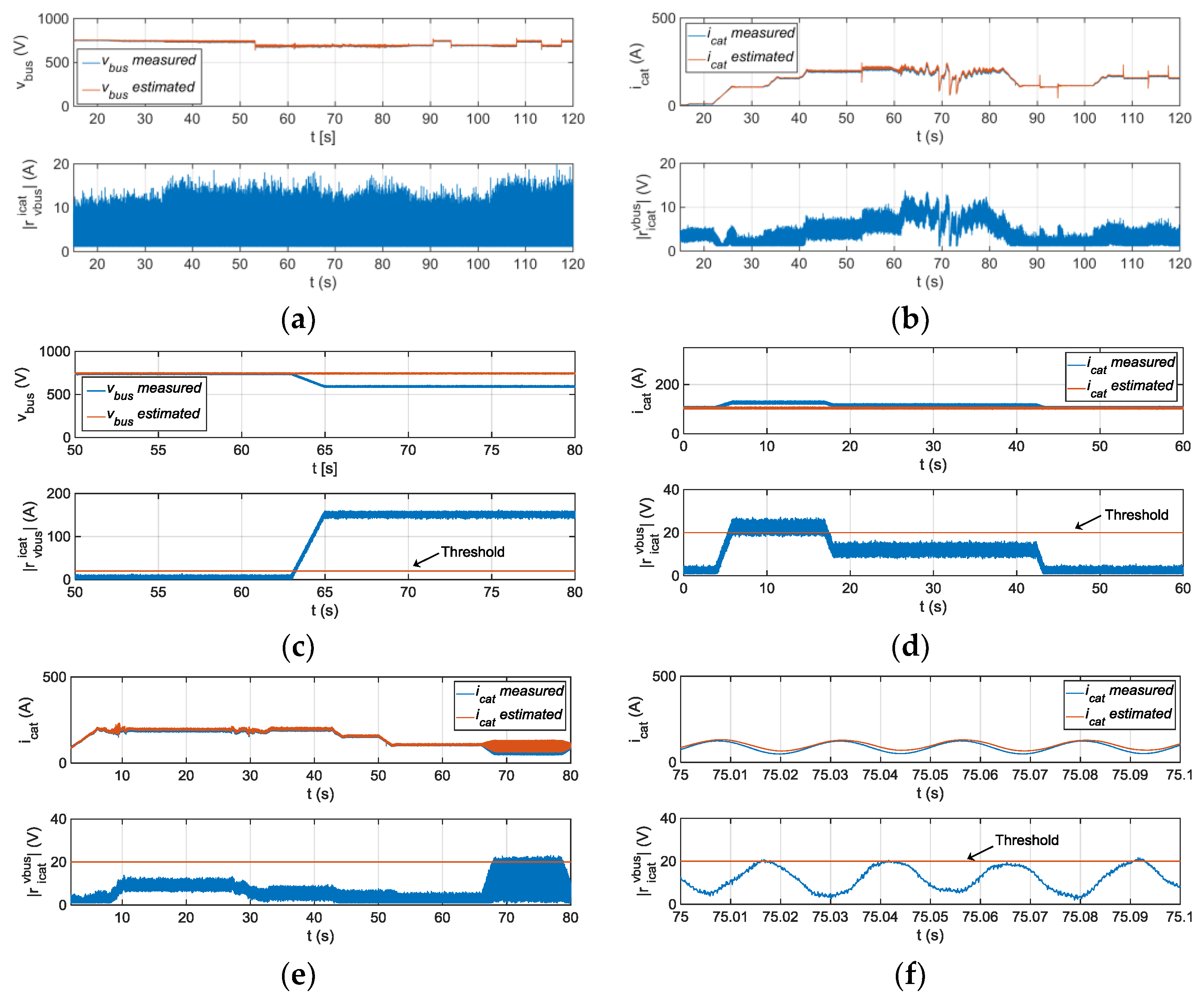
7.1. FDI Validation for DC-Link Voltage and Catenary Current Sensors
The Hardware-in-the-loop simulation results for DC-link voltage and catenary current sensors are shown in
Figure 18. First, the residuals for normal operation are shown. The 𝓛∞ norm (10) is chosen for threshold setting, so residual thresholds should be higher than the maximum value of residual during normal operation. Then, the residuals
for FDI in catenary current sensor and
for FDI in DC-link voltage sensor are validated.
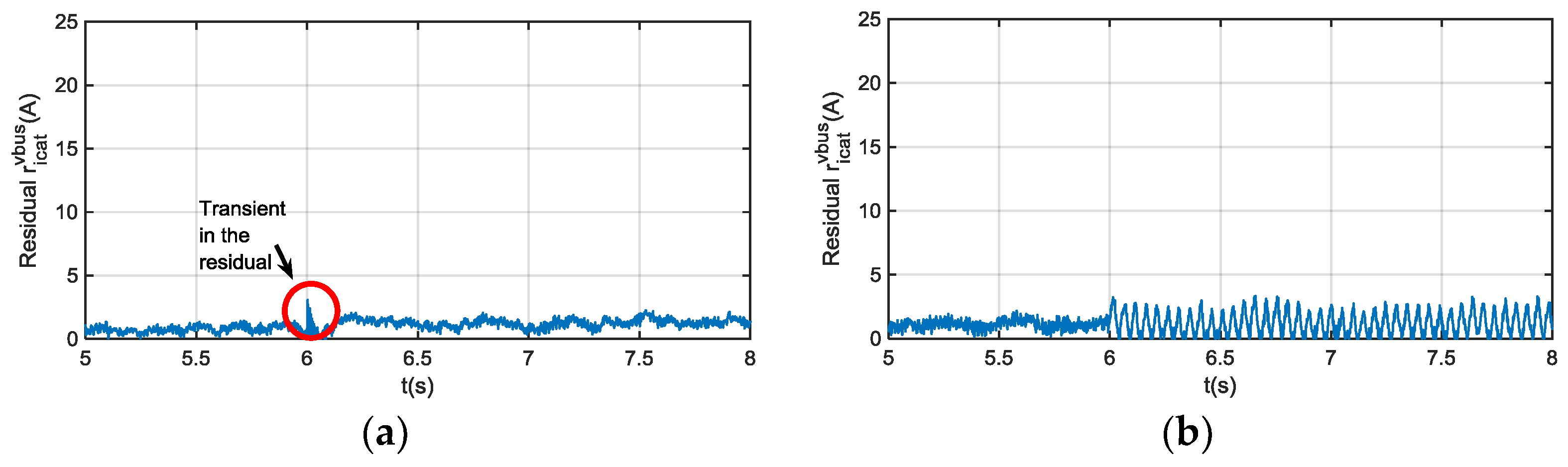
If the diagnostic observer dynamic is fast enough, only transients are appreciated in the residual and . If slower dynamic is chosen, in order to increase the robustness to measurement noises, steady state error appears in , so the threshold should be increased to avoid false detections. Finally, it has to be taken into account that a phase current fault injection generates an oscillation in the catenary current and in the residual , which can generate a false alarm for catenary current sensor FDI, so the FDI for phase current sensors should be checked too, before taking decision. A low pass filter can be implemented too, in order to eliminate the oscillation in the residual.
7.2. FDI Validation for Phase Current Sensors
The FDI approach was implemented in the TCU and validated in the HIL platform. The following results are obtained for a torque reference of 600 Nm and motor speed of 600 rpm. The average value of the envelope depends on the operating point, so for a severity estimation of the fault, a previous relation between the envelope average value and the fault injected for different operating points should be obtained in HIL simulation. Thus, an adaptive threshold based on components, motor torque and speed are needed to estimated fault severity. In the case of fixed threshold, the sensibility of the FDI approach will be different depending on the operating point. For example, for a torque reference of 600 Nm, a threshold of 20 A will detect a +50% gain deviation, whereas the threshold needs to be decrease to 16 A, to detect the same fault for a torque reference of 200 Nm.
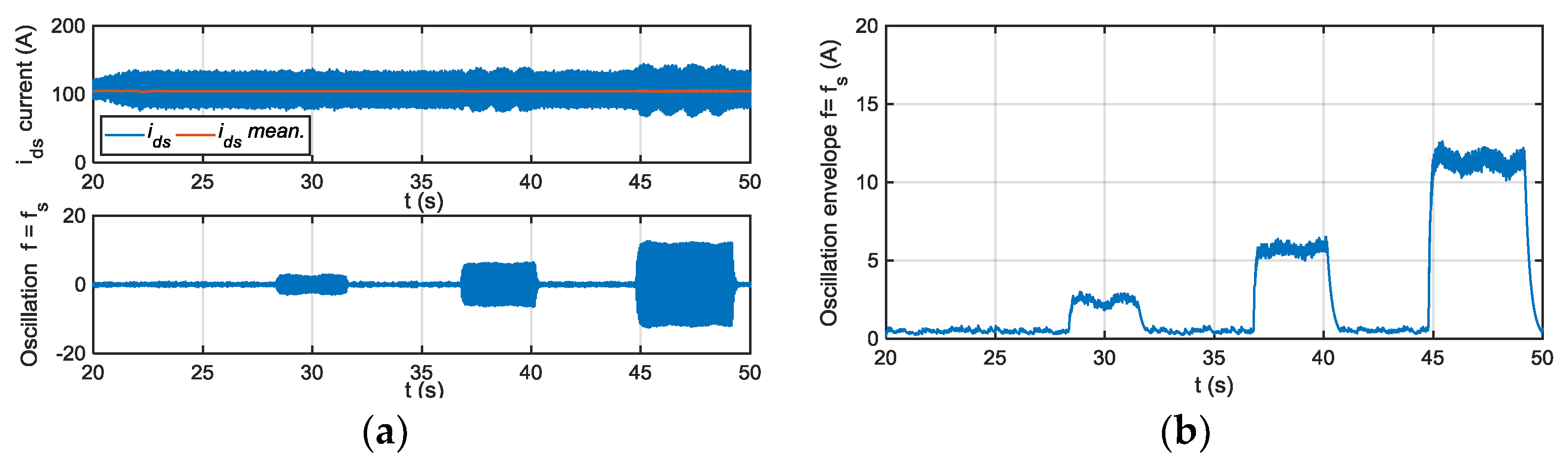
In
Figure 19 the results of deviations injected, as filtering steps are presented, oscillations in (a) and envelopes in (b). Different offset faults are injected into the
sensor current. The current component average value, the oscillation filtered, generated due to the offset fault injected are shown. The
centred filter extracts the oscillation due to an offset fault. Moreover, the envelope of the oscillation, which will be used as residual to compare to the threshold, is shown.
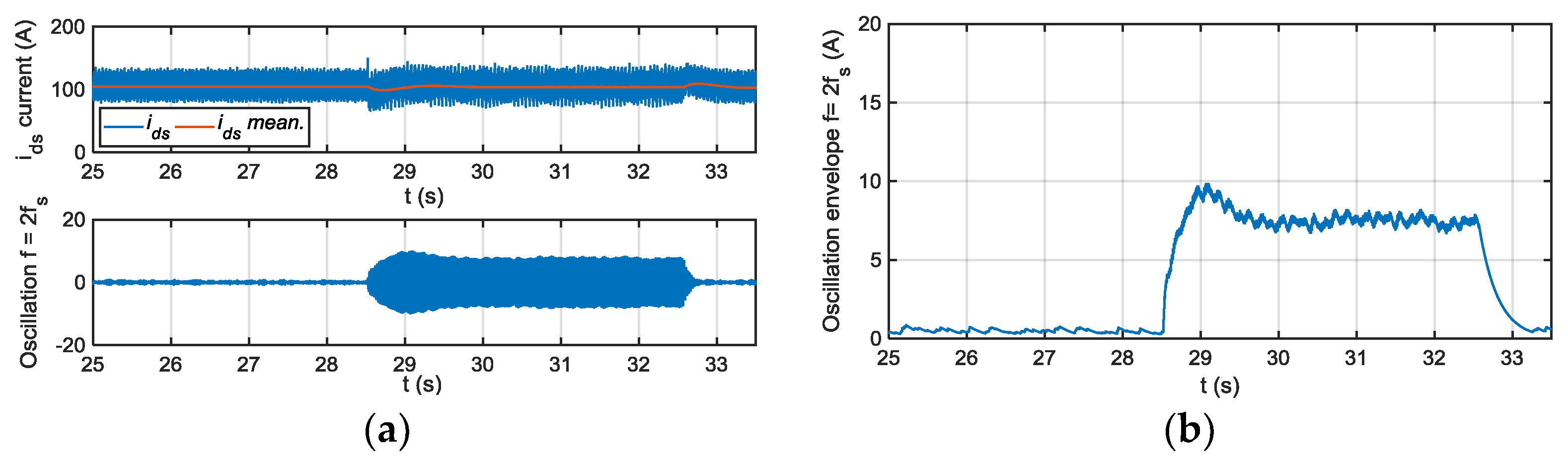
In
Figure 20, the different filtering steps for a gain fault injected in
sensor current are presented, oscillation in (a) and envelope in (b). In this case, the oscillation is extracted by the
centred filter.
The sensibility of the FDI approach is better for low speeds, being higher in than in current component. On the other hand, is more sensitive to torque changes, so the filtering of this component can be more complicated. The FDI approach is able to differentiate between offset and gain fault modes, but it is not possible to isolate between faults in one phase or the other.
7.3. FDI Validation for Speed Sensors
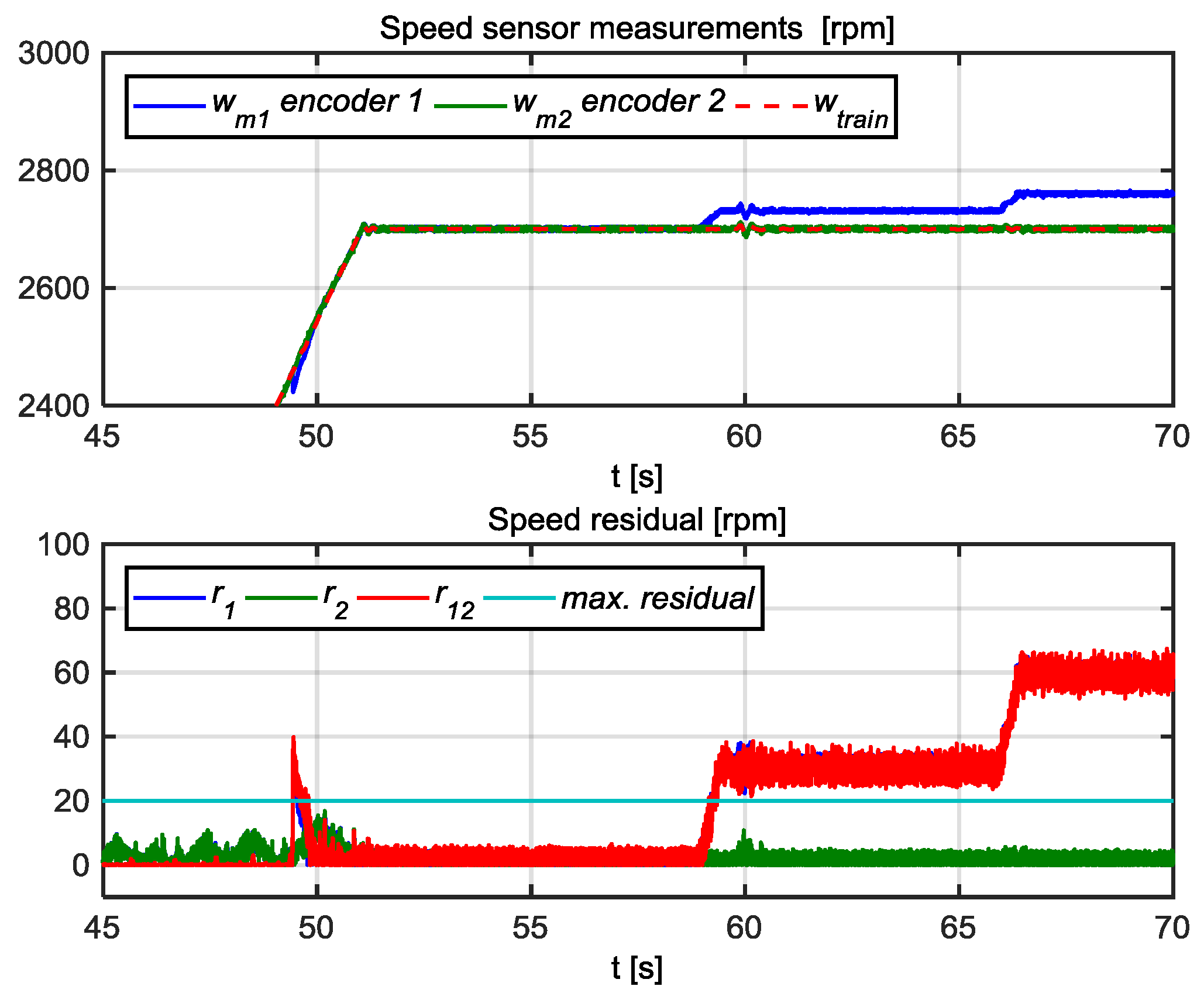
In
Figure 21 the results for the FDI approach for speed sensors are shown. A gain fault corresponding to an increase of 27 rpm is set at 59 s and an increase of 54 rpm at 66 s in
speed sensor. In both cases, the residuals
and
overpass the thresholds, so the flags
and
will be activated. Based on
Table 4, it can be concluded that the fault is in sensor
. This FDI approach just analyses steady state residuals, whereas an anti-sliding algorithm processes transient differences among speed measurements. This kind of algorithms is commonly found in railway traction control systems.
8. Discussion
In this article, different FDI approaches have been presented to build an Integral Sensor Fault Detection and Isolation for a Railway traction drive. Furthermore, a proposal for the fault severity estimation has been presented too. An observer based FDI approach has been used for DC-link voltage and catenary current sensors, a signal analysis based FDI approach for phase current sensors and a hardware redundancy based FDI for speed sensors. Each approach has been justified as the most suitable one for the traction drive presented. The FDI approach selection has been done based on the following factors: algorithm complexity, hardware and software resources available in the traction drive, tuning difficulty due to parameter variation/uncertainties and reliability. The observer-based FDI for DC-link voltage and catenary current sensor uses the input filter model instead of the motor model. As input filter model is simpler, the influence of parameter variations and uncertainties is lower. Furthermore, a Luenberger observer is proposed, due to lower algorithm complexity in comparison to other solutions. The signal analysis based FDI for phase current sensors need low computational resources, as some algorithms are already available in the control strategy. Furthermore, as it is not based on a motor model, motor parameter estimation during operation is not needed. Finally, a redundant hardware based FDI is proposed for speed sensor faults, due to reliability and low computational cost.
Furthermore, the approaches developed in Matlab-Simulink have been simulated and implemented in a HIL platform with a real Railway TCU, designed for a tram. FDI approaches have been implemented in the DSP of the TCU, being the execution period 20 µs.
The presented fault severity calculation was not implemented in real time, in order to reduce the computational requirements for the DSP. The Integral Sensor Fault Detection and Isolation presented, allows detecting and isolating faults in all the sensors presented in the traction drive.
The FDI for the DC-link voltage and catenary current sensors is based on the input filter model of the traction drive, and it is not dependent on the motor model. The uncertainties and variability of parameters in the input filter are lower than in the motor model, which makes this solution easier to implement in a real application. Moreover, this FDI approach is not influenced by the operating point of the motor. The balance between the robustness and the sensitivity of the strategy is given by the observer feedback gain. Higher gains allow setting lower thresholds to increase the detection sensitivity, but this implies a lower robustness due to false alarms caused by measurement noises or other sensor faults. This work has set as a threshold of 20 A for current residual and 20 V for voltage residual, based on fault free behavior, so lower values should not be considered as a degraded zone. This FDI approach in combination with hardware redundancy, allows detecting and isolating faults in catenary current, crowbar current, return current, DC-link voltage and catenary voltage sensors. The fault severity estimation is calculated offline, based on previously obtained relations between the injected faults and generated residuals. Then a likelihood ratio is calculated with the residual values obtained in real time to estimate the most probable fault severity.
The FDI strategy for phase current sensors is able to detect two fault modes, offset and gain. Its main limitation is that, it is not possible to isolate between the two available phase current sensors, so both should to be checked to isolate the faulty sensor. Phase current sensors faults generate an oscillation which depends on the operating point, so in case of fixed threshold, the sensitivity for the same threshold is different depending on the operating point. An adaptive threshold to maintain the same sensibility is recommended, based on current components, estimated torque and motor speed. Residual envelope and fault relation is obtained by fault injection. The oscillation extraction is subject to motor electrical frequency estimation and bandwidth around it. The extraction filter should be redesign in case of a change in the execution period.
The FDI algorithm for speed sensors is the least demanding solution in terms of computational cost for traction drives where more than one speed measurement is available.
The main contribution of this work is the definition of an Integral Sensor Fault Detection and Isolation for a Railway traction drive, in opposite to most of the research works, which focus on only one or two kind of sensors. Moreover, it has been validated in a real Railway traction control unit, whereas the previous works have been validated in test benches without commercial control units, in rapid control prototyping devices.
Further research should be done with regard to fault severity estimation and fault reconstruction, in combination with information coming from other available tools in industry as FMEA. Fault injection and performance analysis under faults can provide information for an enhanced FMEA. This enhanced FMEA combines with FDI approaches, can provide reliable fault severity estimation. Furthermore, an adaptive threshold automation should be developed to optimize the sensibility of the detection and robustness for the different operating points of the motor.
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}