3.1. Fusion of TDOA Measurement Uncertainty
Since the underwater sensor network we consider is composed of multiple receivers, it is necessary to expand the likelihood function of a single receiver in Equation (6) to multiple TDOA measurements. A method that fuses TDOA measurements represented by GMMs was proposed in [
12], where the joint likelihood was defined as,
The approximated mean, covariance and weight of the fused mixture component is defined by the multiplication of mixture pairs for each GMM,
where
Nt is the total number of TDOA observations,
is the index for the
k-th mixture pair of
i-th GMM determined by measurement selection strategies of target tracking sensor suite depicted in [
26] at time
t.
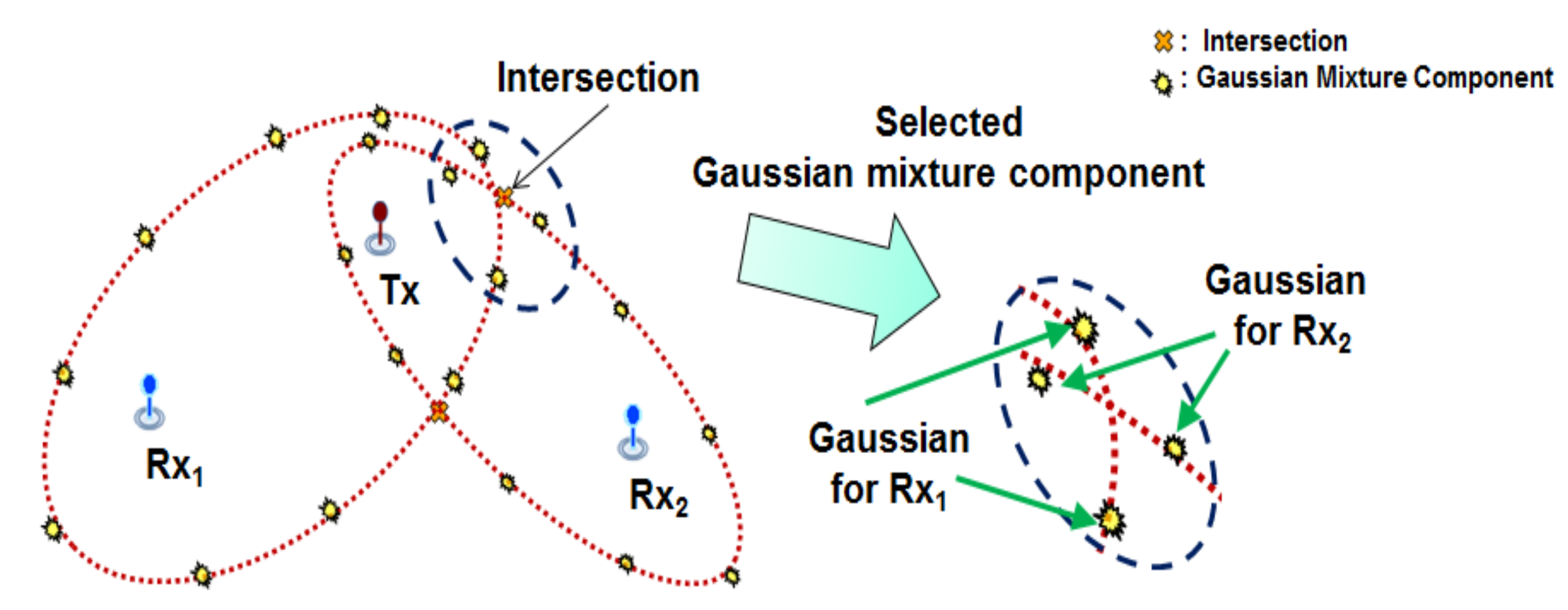
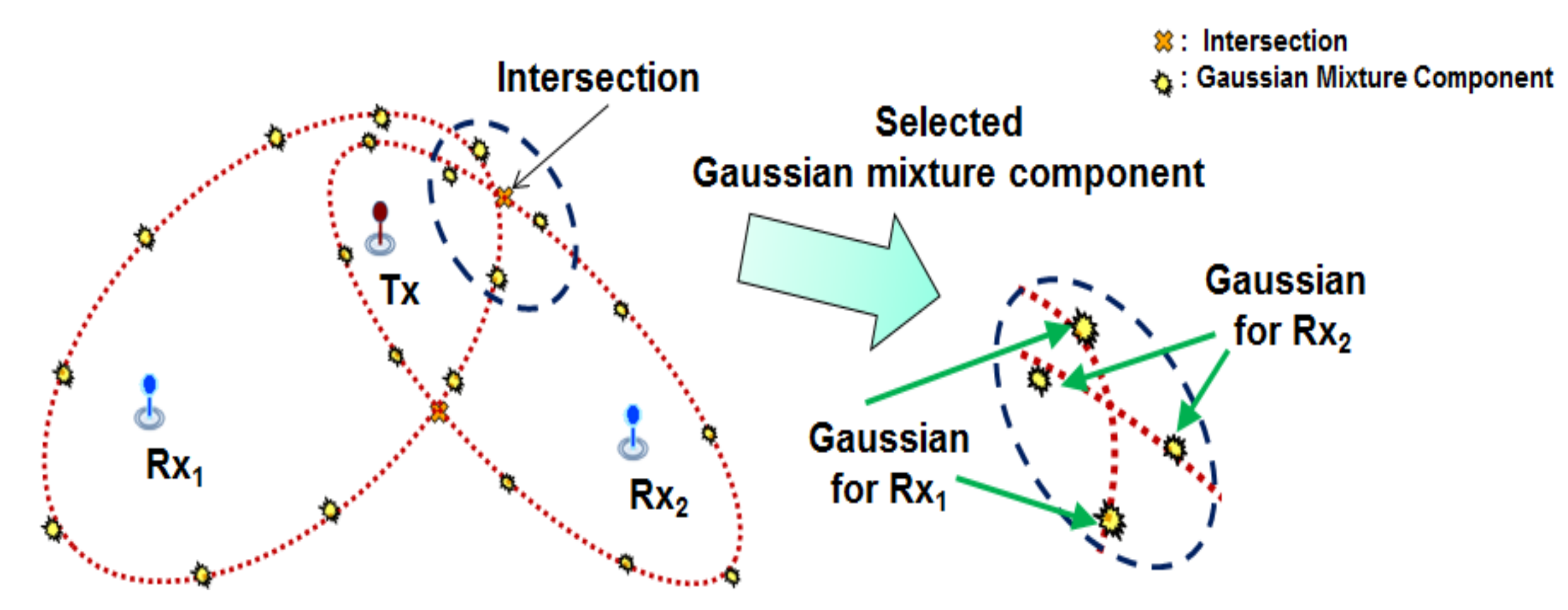
However, considering all mixture components incurs unnecessary computation. In addition, because some mixtures are unrelated to the target position, using all mixture components may degrade localization performance. In order to reduce computation and increase localization performance, a fusion method using only the mixture components near the intersections is proposed. The fused likelihood can be described by the following equation:
where
Mt is the number of fused mixture components and
,
,
are the approximated weight, mean and covariance, respectively. The parameters of each fused mixture component are calculated by the multiplication of selected mixture components near the intersections. The detailed process for selecting mixture components based on intersections is described in the next paragraph.
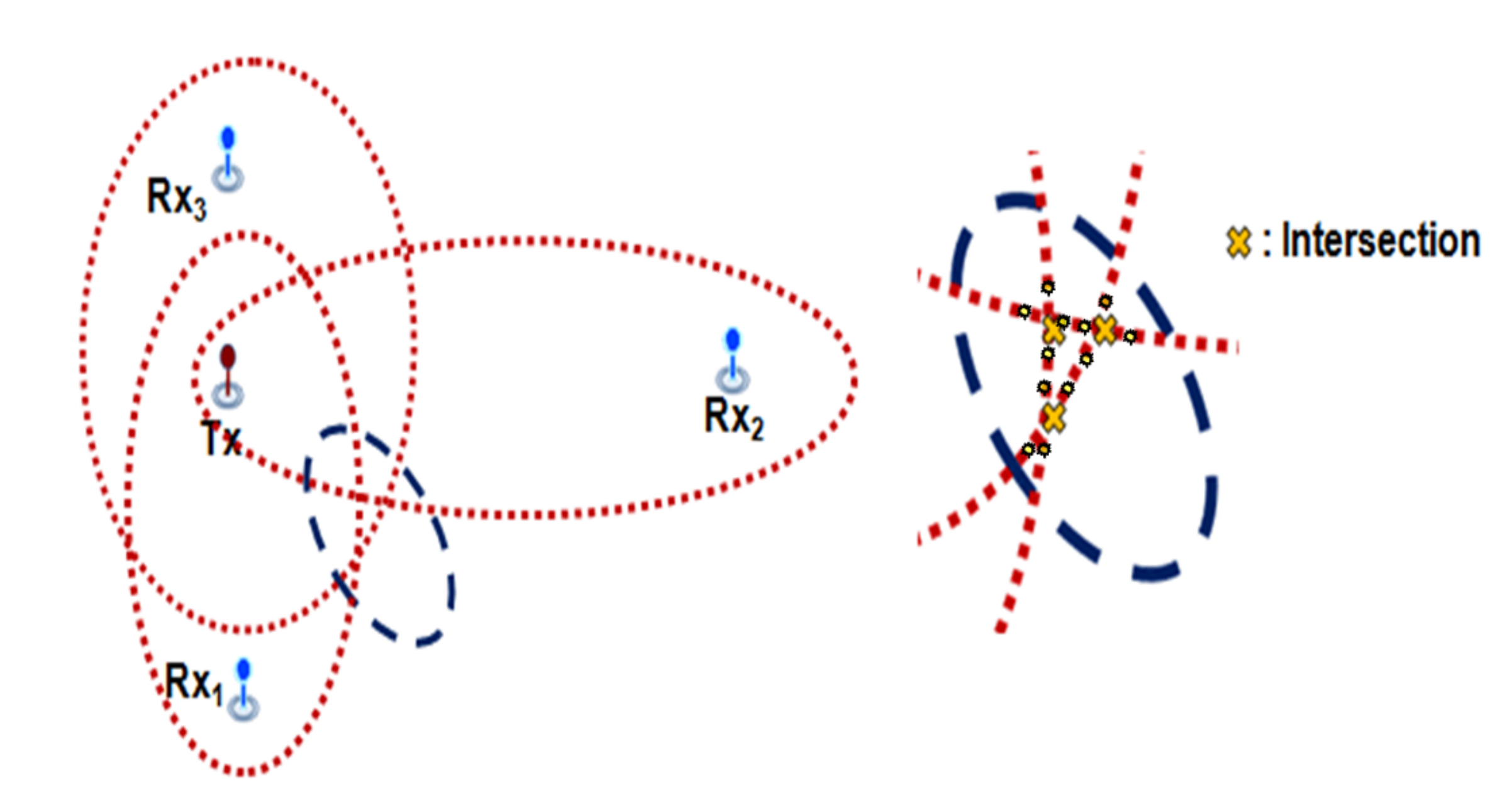
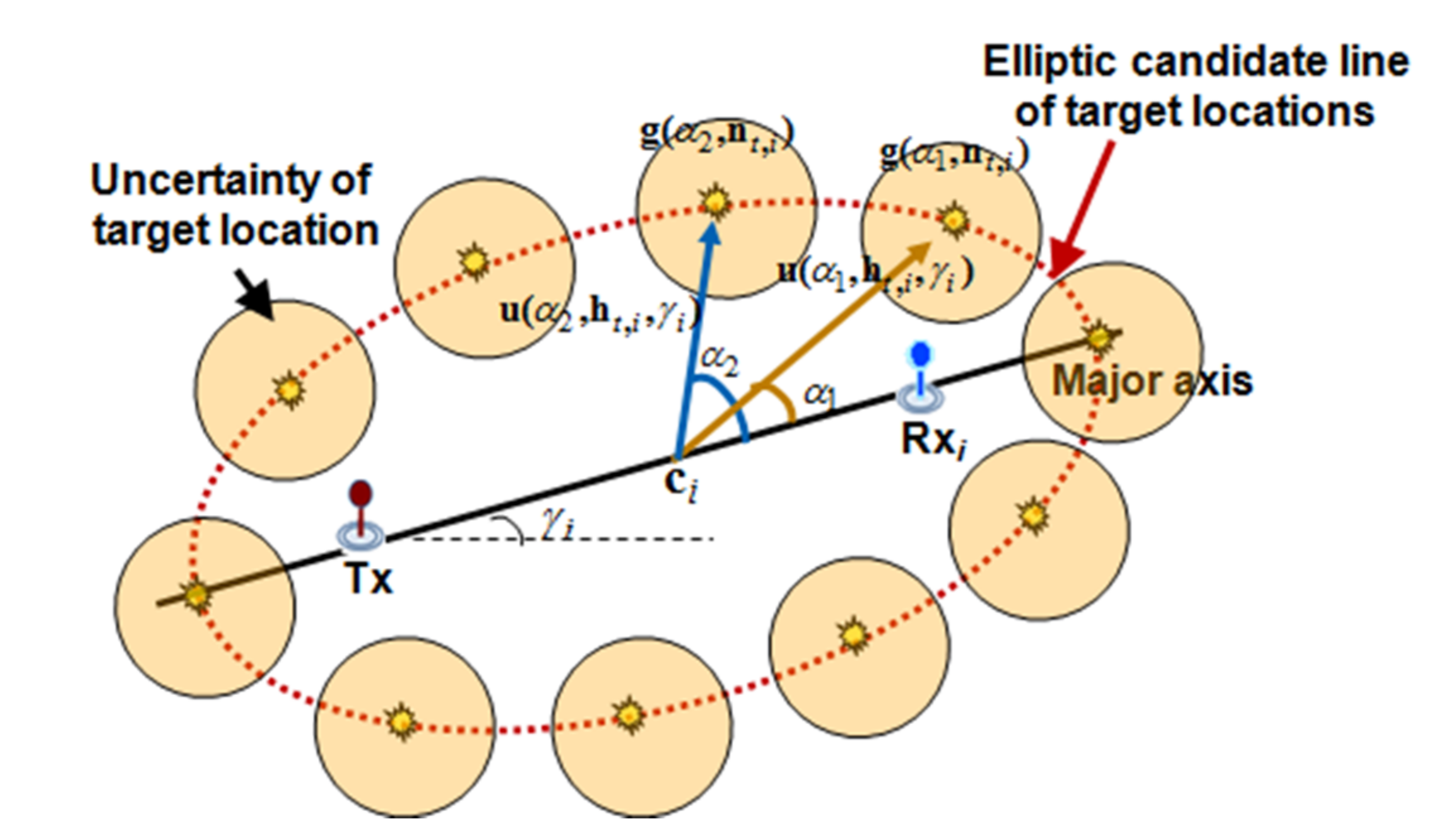
When two TDOA measurements are obtained from the multi-static sensor networks, intersections of the two ellipses are estimated (see
Appendix A). For example, the number of fused mixture components is two and the four neighboring mixture components from the each intersection are selected as in
Figure 4.
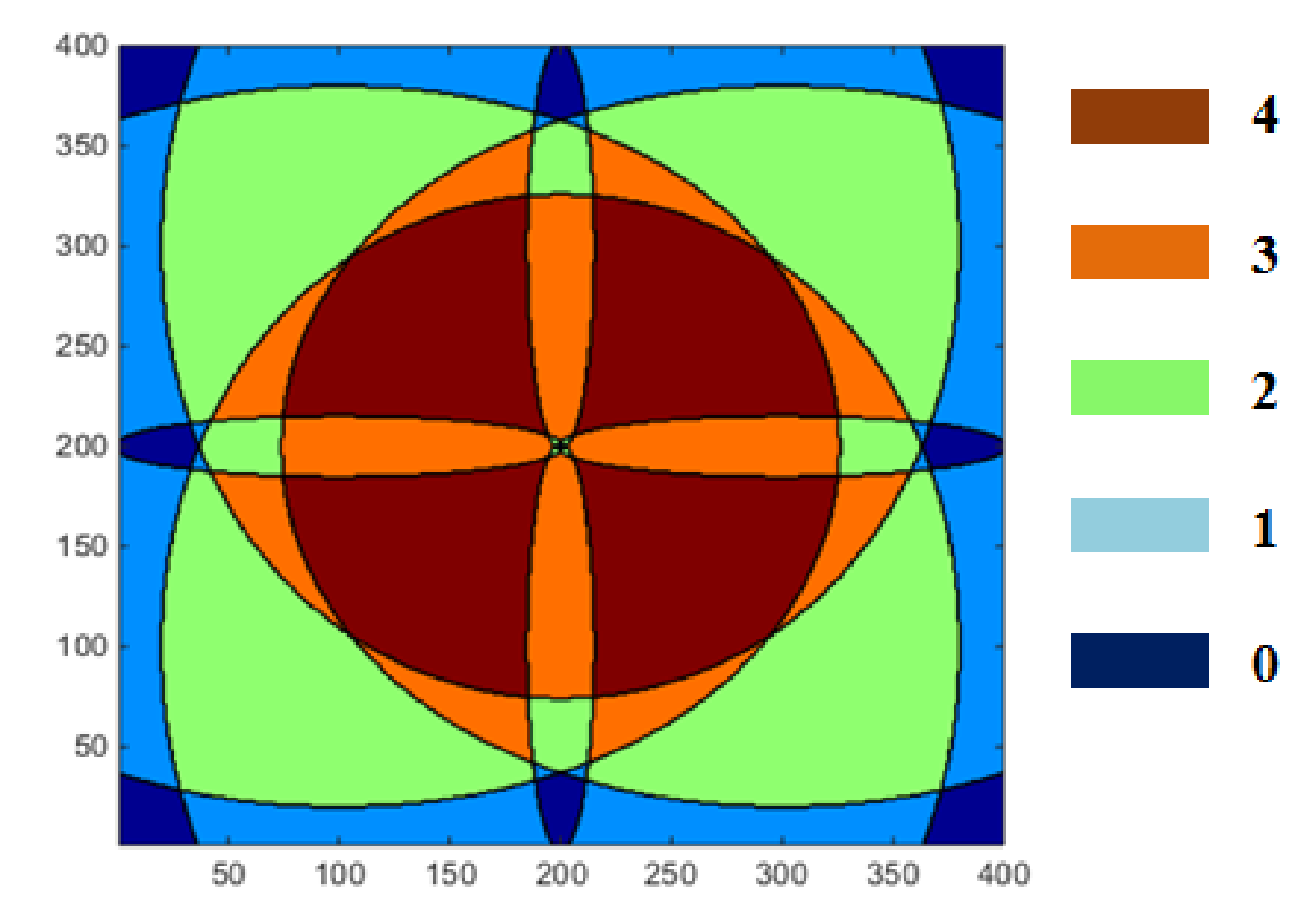
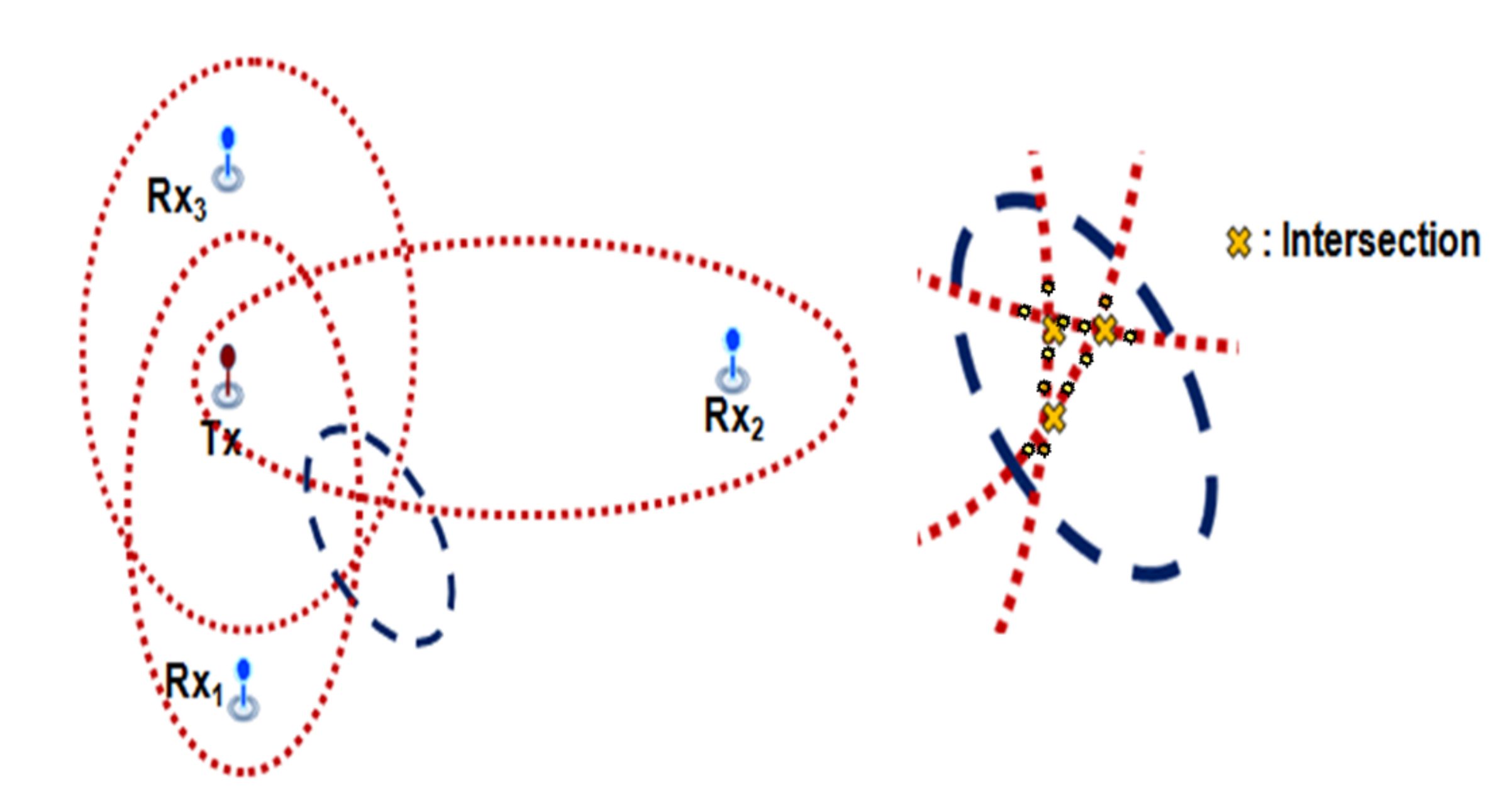
If we obtain three or more TDOA measurements, intersections of three or more ellipses may occur, as shown in
Figure 5. In this situation, multiple neighboring mixture components from these intersections are selected for one fused mixture. In order to obtain the locations of these intersections, we use the Euclidean distance between the intersections as given in,
where
It,
q and I
t,
r are the locations of intersections at time
t, and
ε is tolerance error. The elements of the set
Et,
q are selected as the mixture components for computing the fused likelihood. For intersections of three ellipses as shown in
Figure 5, for example, we can select twelve neighboring mixtures.
3.2. Track Management for Insufficient Information
When monitoring a large surveillance region, ambiguity in target location occurs due to the insufficient measurement information produced by a limited number of sensors. Because all intersections of TDOA ellipses have the same likelihood value, it is difficult to determine the intersection that indicates the true position of the target. If this ambiguity is not resolved, tracking performance will likely be degraded due to the presence of ghost targets. In this paper, track management with track splitting based on the likelihood function is proposed in order to suppress the influence of the ambiguity caused by ghost targets, as discussed in our previous work [
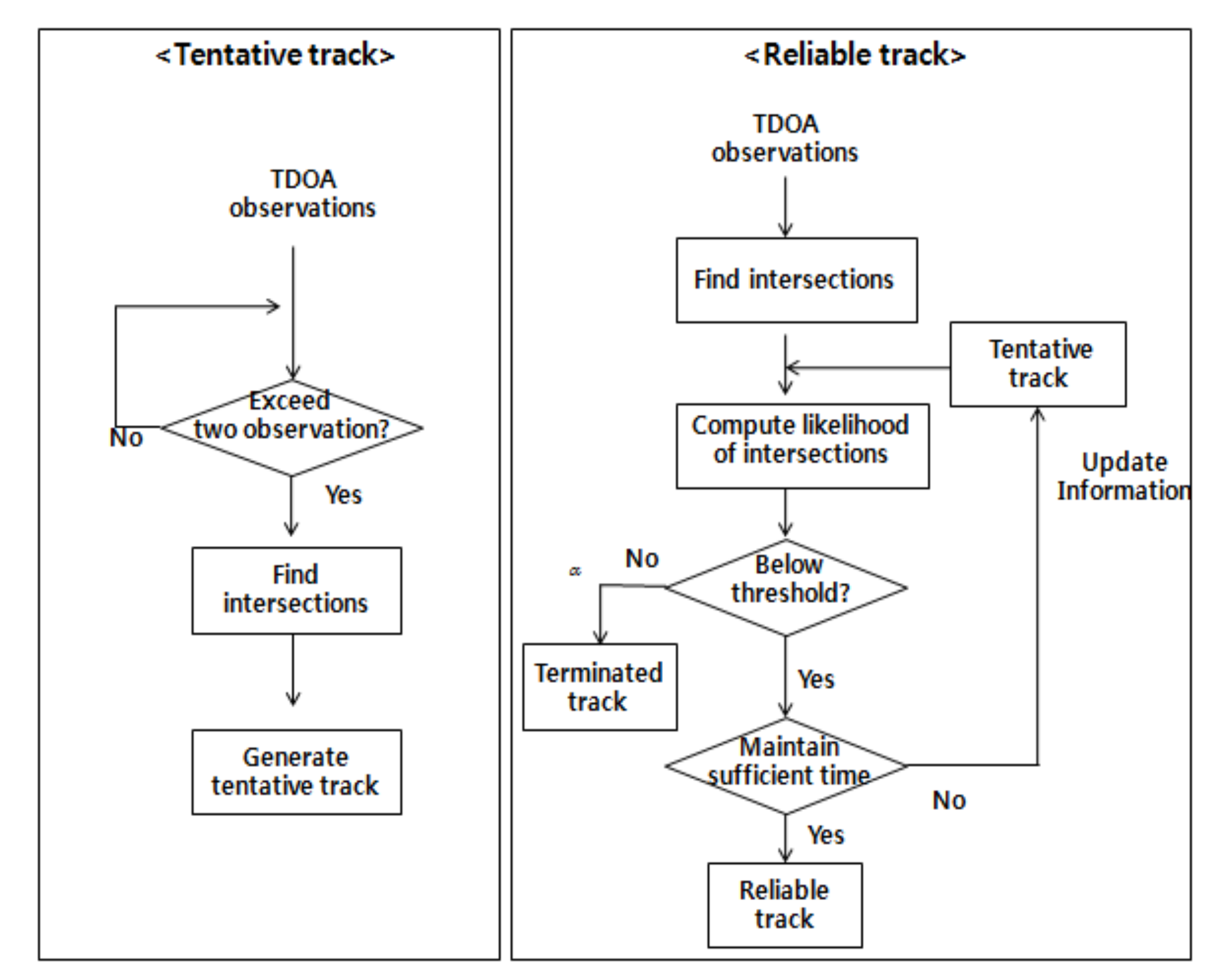
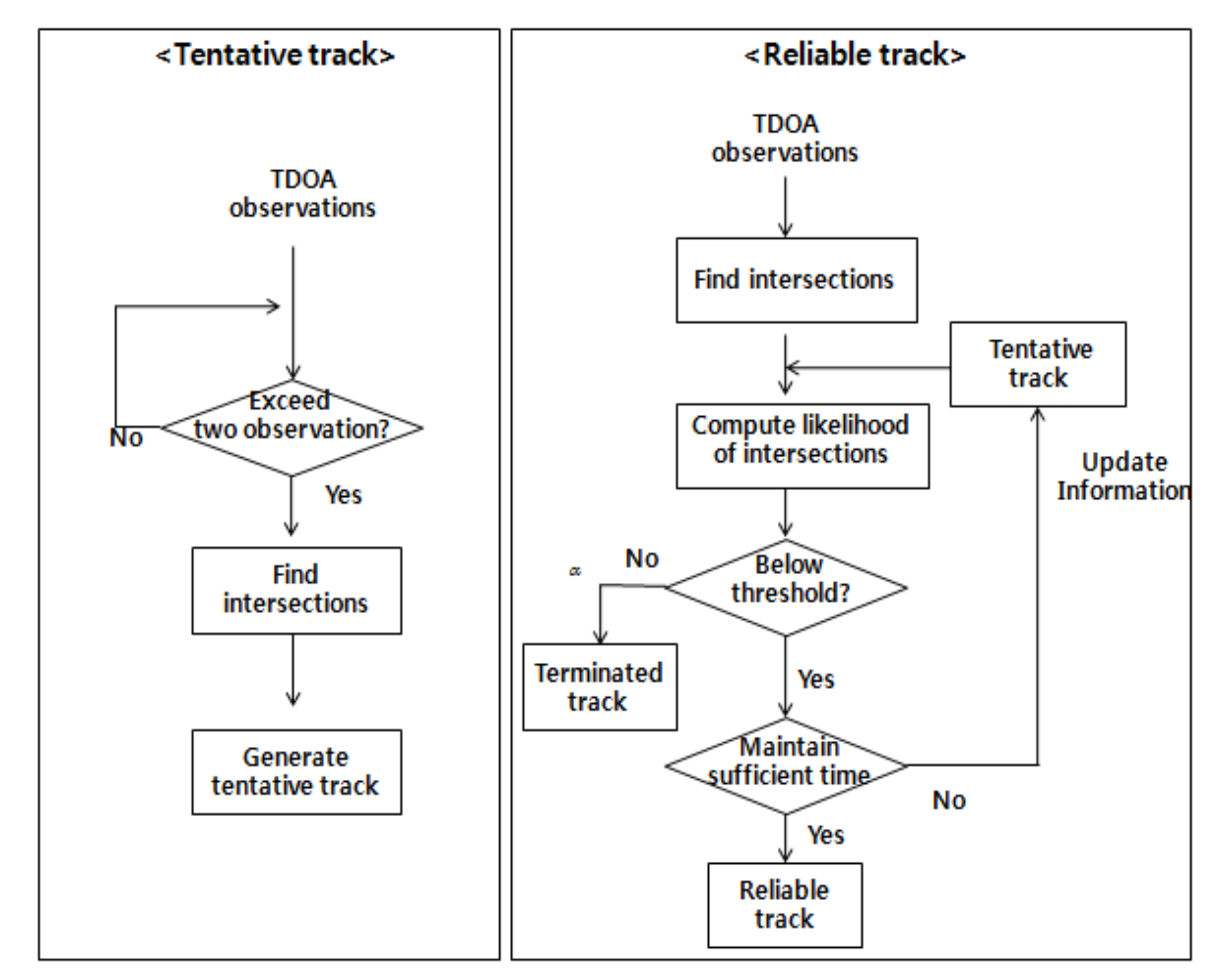
27]. In order to resolve the ambiguity, it is necessary to establish a reliable track for the target as described in
Figure 6. First, tentative tracks are initiated at the ellipse intersections when two or more TDOA measurements are received from the sensor network. Then, the status of each tentative track can be transitioned into either a confirmed track or a terminated track through the process of track management in subsequent scans.
Given the
l-th sequence of intersections up to time
t, the likelihood that a particular track is a true target track can be written as,
where
is an event and
is the intersection location of the
l-th sequence at time
t. Under independent linear-Gaussian assumption, the likelihood function can be approximated:
where
represents the relation between state and locations.
and
are the predicted location and innovation covariance, respectively, at time
j.
where
is the covariance of the predicted state and
is the covariance of the fused mixture component located near the intersection. The mixture component located near the intersection of three or more ellipses has low covariance relative to the component at the intersection of two ellipses due to the fusion of a larger number of selected mixture components.
Following from Equation (20), the negative log likelihood of the track can be approximated recursively as follows:
If the track negative log likelihood is below a threshold during a certain period of time, the tentative track is transitioned into the reliable track. Otherwise, the tentative track is terminated. This threshold follows from the chi-square table where the tail probability is typically determined as 0.01 [
28].
When insufficient measurements are obtained in the update process, intersections representing false (ghost) targets can be eliminated via a gating process:
where
It,n is the location of the
n-th intersection, and
dt,n is the Mahalanobis distance between the predicted location derived from the reliable track and intersection locations at time
t. If the Mahalanobis distance exceeds a certain threshold, we consider the intersection to be a false location. Like the reliable track process, the threshold is obtained from the Chi-square table [
28].
3.3. Track Estimation Using Stack-Based Data Association
In a dense and noisy environment, the target localization performance can often be degraded abruptly. In this situation, in order to improve the localization performance, a batch tracking method based on measurements from multiple scans, rather than single scan, is considered.
We propose a tree search-based method for tracking based on a sequence of measurements, or scans. Specifically, we apply a variant of the stack algorithm [
29,
30], a best-first approach that extends the most likely path (or
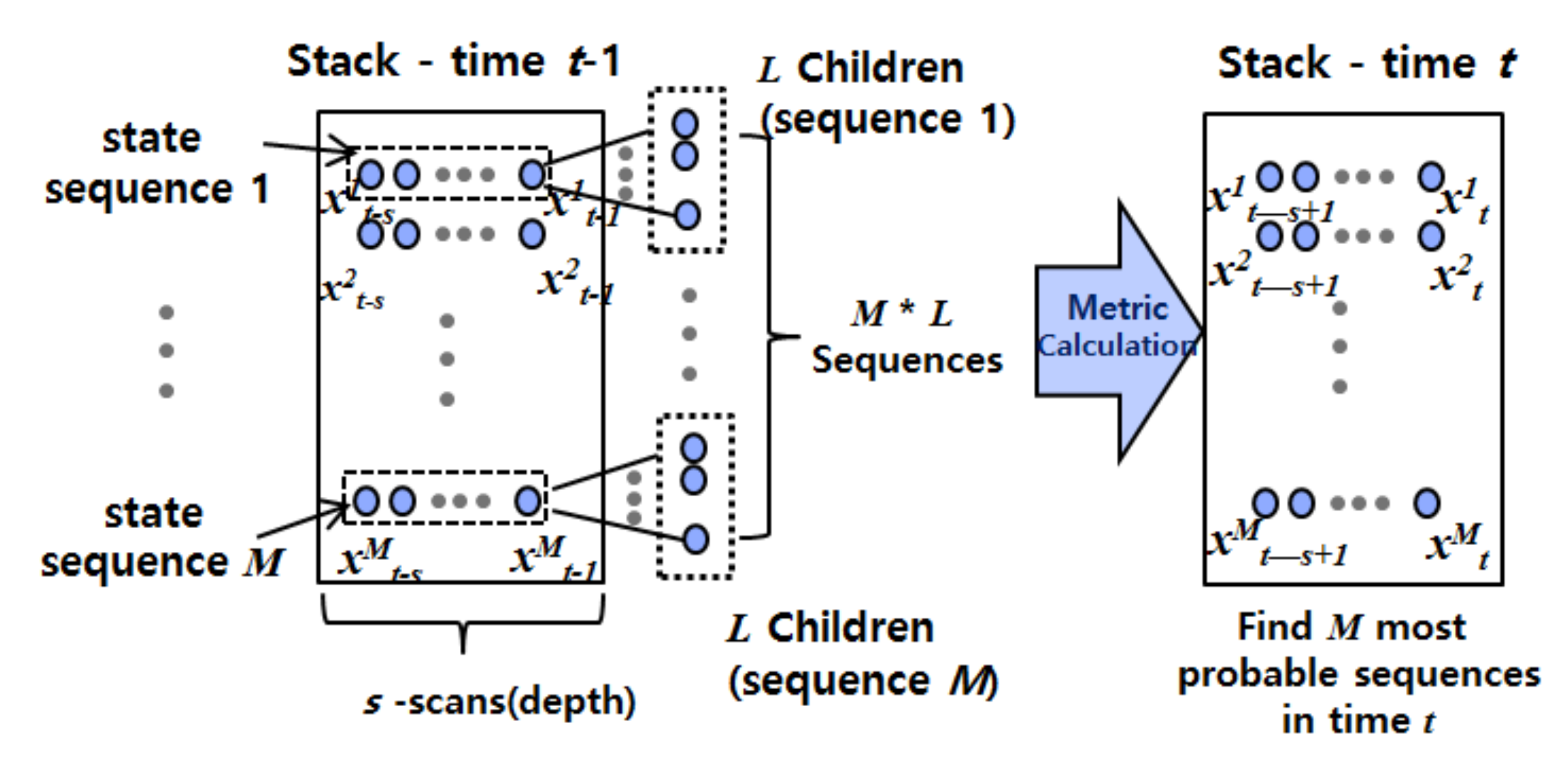
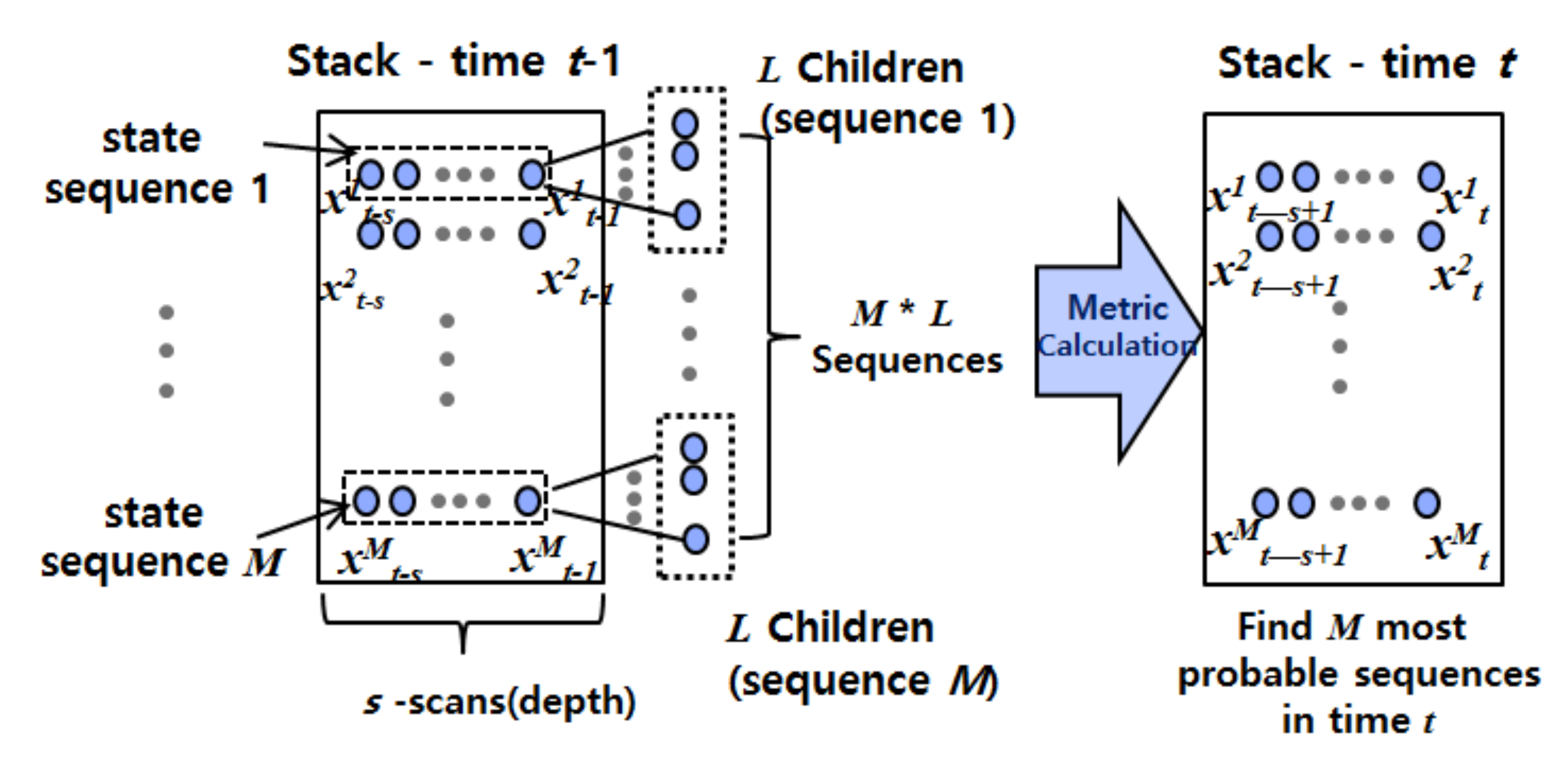
L paths) at each iteration of the algorithm. The proposed stack-based data association method uses a tree structure and builds a list (or stack) of possible state sequences containing states derived from acceptable target locations. The recursive steps of stack-based data association are as shown in
Figure 7. At each time, all target state sequences in the stack are extended to
L possible children representing
L possible current states. The trajectory of a target is then estimated by a weighted sum of only the
M most likely target state sequences of
M ×
L sequences. Here, the weight value of each target state sequence is directly proportional to its posterior probability calculated from measurements, which will be described later.
In the proposed method, we find the trajectory through a set of candidate locations in a target existence region established from the approximated likelihood function of sequence of intersections from track management. The center location and validation limit of the target existence region apply the approximated mean and covariance, respectively. At time
t, the measurements of the target are represented as the candidate locations sampled from the target existence region,
where
Zt,
s denotes the set of measurements from consecutive scans,
t is the current time, and
s is the scan depth.
is sampled uniformly in the target existence region with approximated likelihood, and
v is the number of candidate locations. It can be assumed that the sampled measurements in the target existence region have originated from the target or from clutter. Therefore, the association event of the
i-th measurement at time
t is defined as
The problem of target trajectory estimation using a candidate measurement sequences is based on approximation of a posteriori probability density function of a target state sequence. A brute force approach to this problem is to establish a tree structure with the measurements from the batch data and perform an exhaustive search of the paths through the tree to select the most likely sequence of candidates. However, the number of possible sequences increases exponentially in highly cluttered environments. Although many approaches, including pruning and merging, have been applied, these approaches have not provided sufficient performance in extreme conditions. The proposed stack-based data association overcomes this problem by searching for a sequence of target states instead of a sequence of measurements.
In order to establish the state sequences in the stack, a discretization process that samples possible child states is required. In the discretization process, L possible child states of each sequence in the stack are sampled uniformly; only the validation region (rather than the full state space) is considered in order to reduce estimation complexity. At time t, the predicted state and the innovation covariance of the target state sequences are calculated as like as in Equations (21) and (22). Here, the validation regions for target state sequences are determined by using the predicted mean and its covariance as in Equation (24).
Since the weight of the
k-th sequence of target states in the stack is proportional to the posterior probability conditioned on
s measurements from consecutive scans, we can write this posterior probability using Bayes’ theorem as,
where
, and
P(
Zt,
s) is a normalization term that is assumed to be constant across time.
P(
Zt,
s|
Xkt,
s) is the cumulative likelihood term of consecutive measurements conditioned on target state sequences.
P(
Xkt,
s) is the prior on the target state sequence, all of which are assumed to be equally likely. The weight
of the
k-th target state sequence is calculated as,
where
is the state transition probability which follows a Gaussian distribution with mean
and covariance
.
The cumulative conditional likelihood
p(
Zj|
xkj) is calculated by summing over all association events as follows:
where
mj is the number of validated measurement at time
j. Note that the second line follows from the independence Gaussian assumption. The observation probability is given by
where
is the covariance of the observation matrix
H. When index
i is equal to index
r, the probability represents the
r-th valid measurement which was generated by the state
xkj. Therefore, it is calculated from the distribution of the observation model. Otherwise, the clutter measurements are assumed to be uniformly distributed in the validation region with volume
V. The prior probability of each association event and is given by
where
PD is the probability of detecting the target. Let
denote the probability mass function of
mj false measurements in the validation region modeled by a Poisson distribution [
28],
where
λ is the average number of clutter measurements per unit volume.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}