A Range Ambiguity Suppression Processing Method for Spaceborne SAR with Up and Down Chirp Modulation



Abstract
1. Introduction
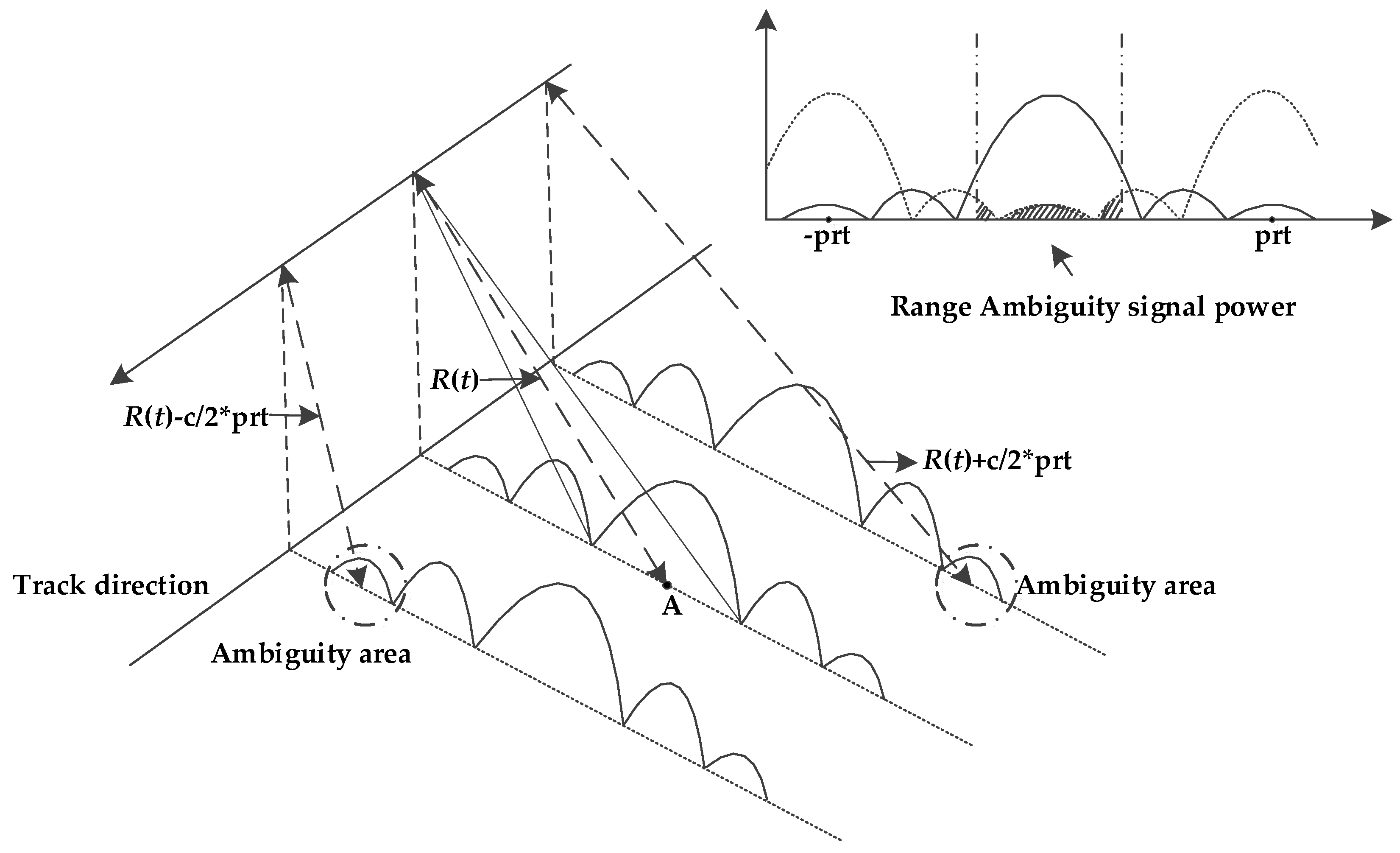
2. Range Ambiguity Analysis by Alternatively Up and Down Chirp Modulation
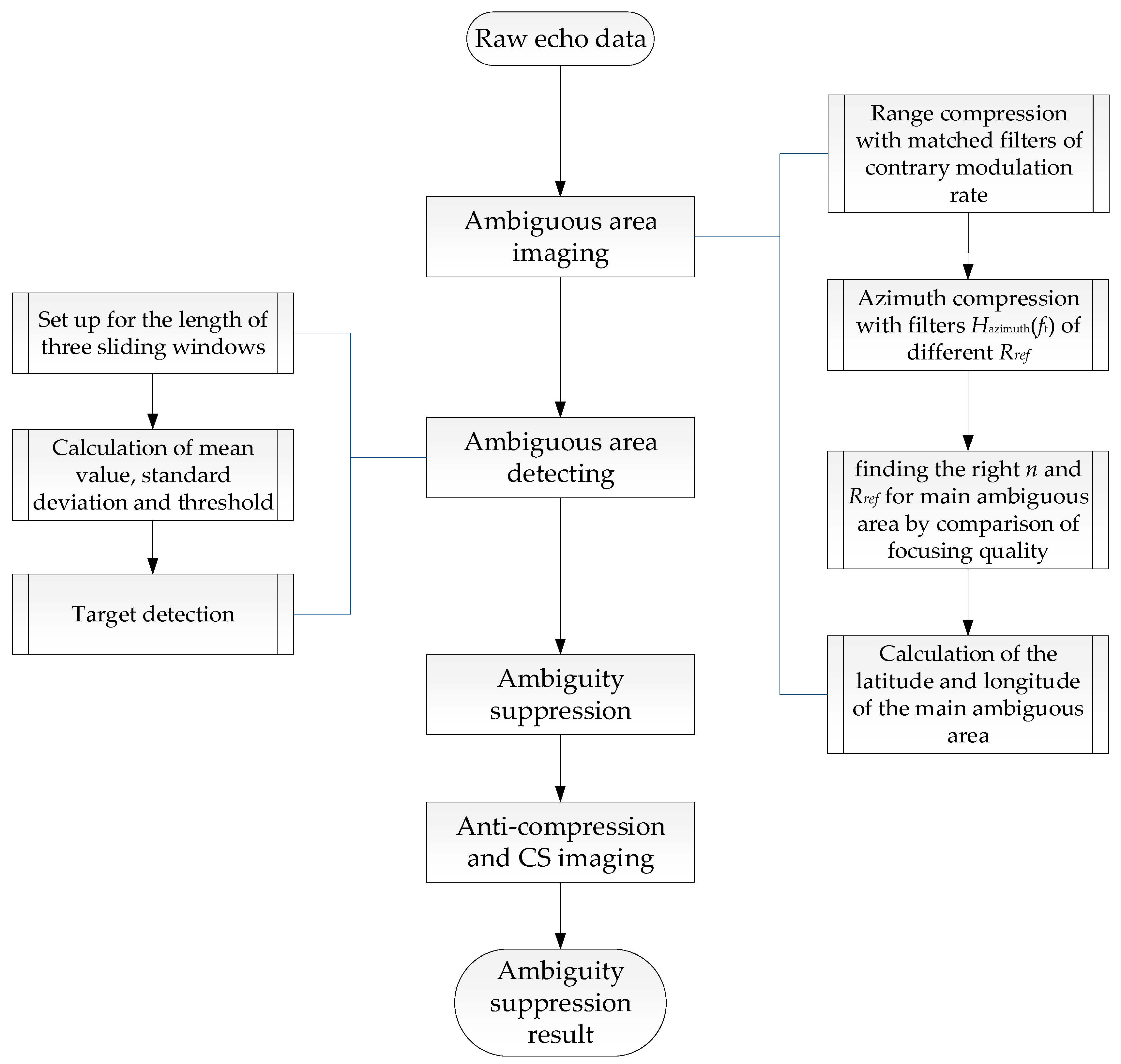
3. Ambiguity Suppression Method
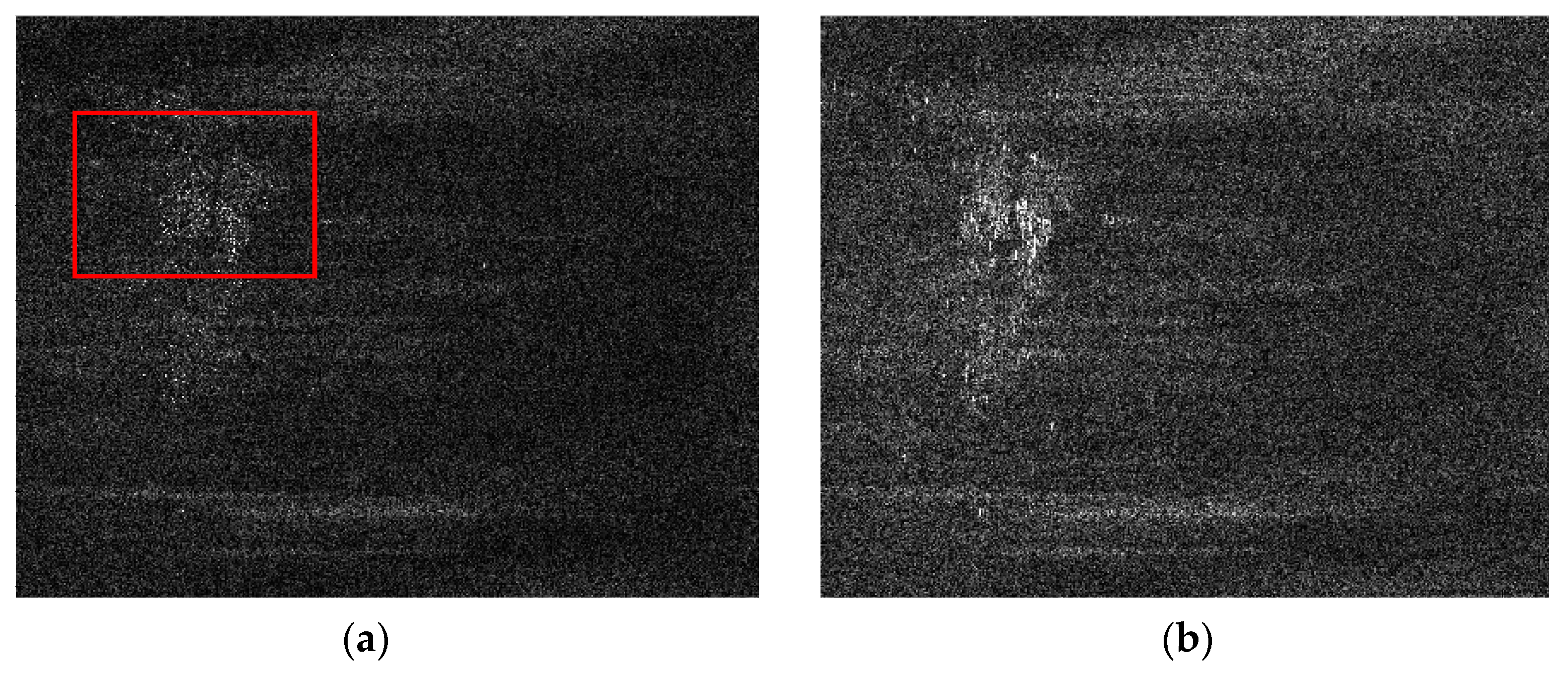
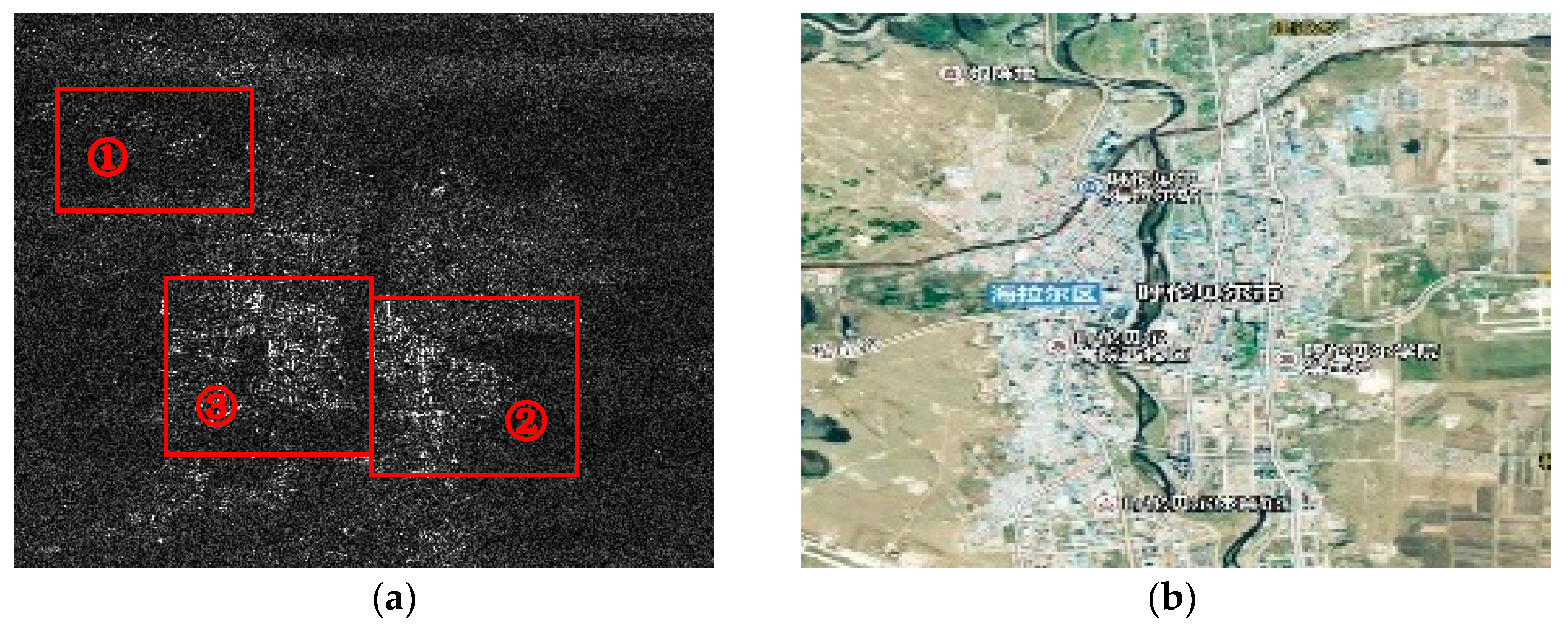
3.1. Ambiguous Area Imaging
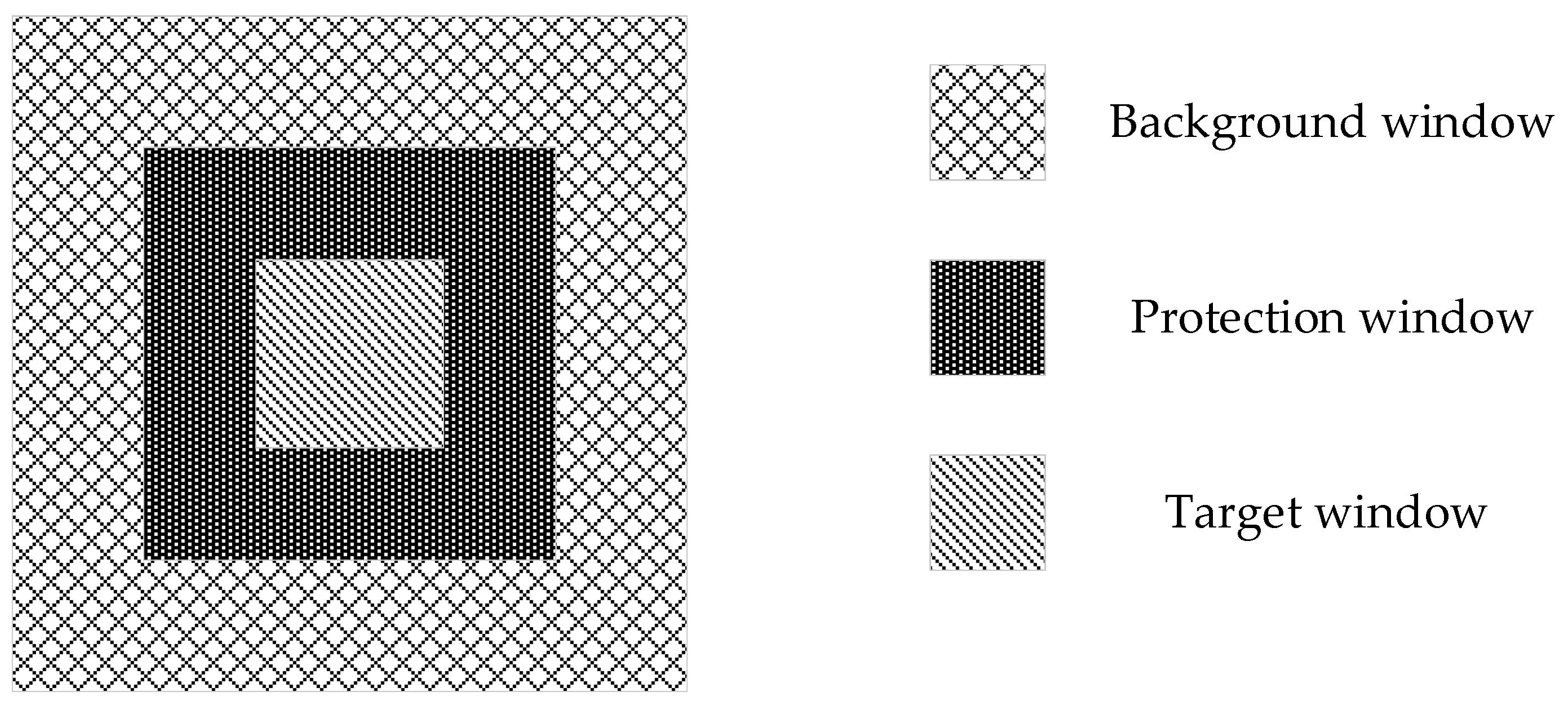
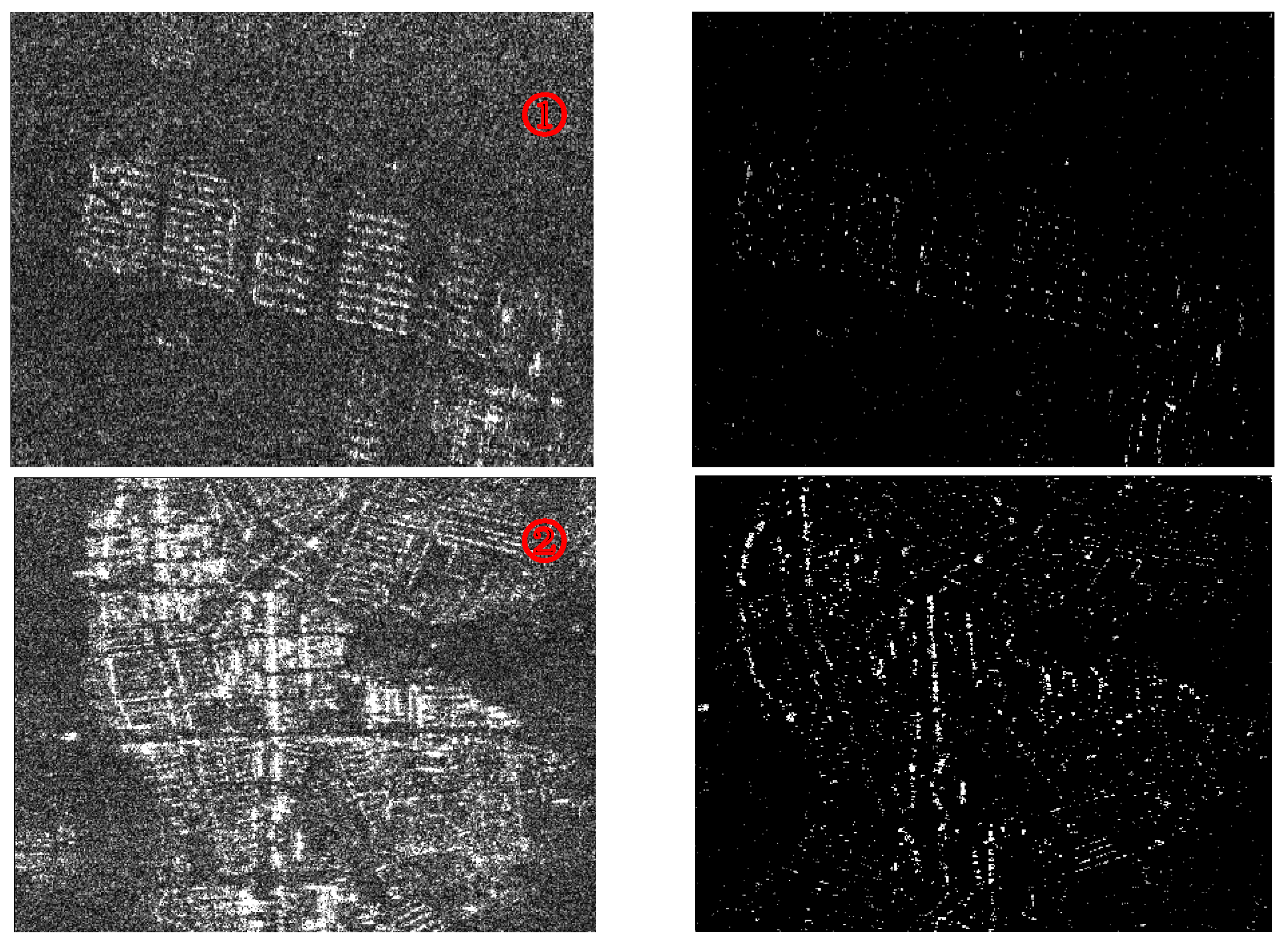
3.2. Ambiguous Area Detecting Based on CFAR
3.3. Ambiguity Suppression
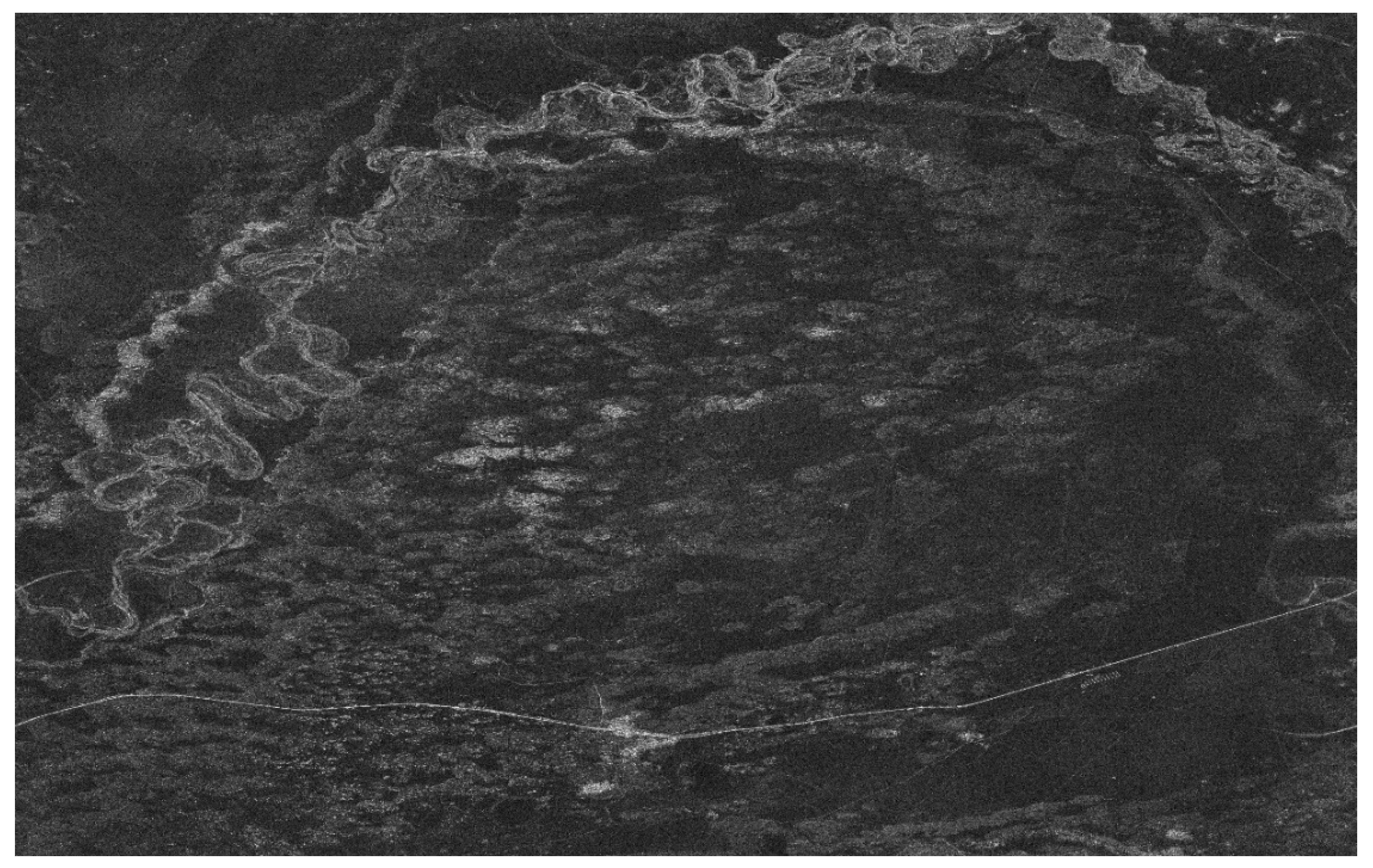
3.4. Anti-Compression and Imaging
- Only for ambiguous areas with odd ambiguous numbers;
- Only for strip data with tiny range migration.
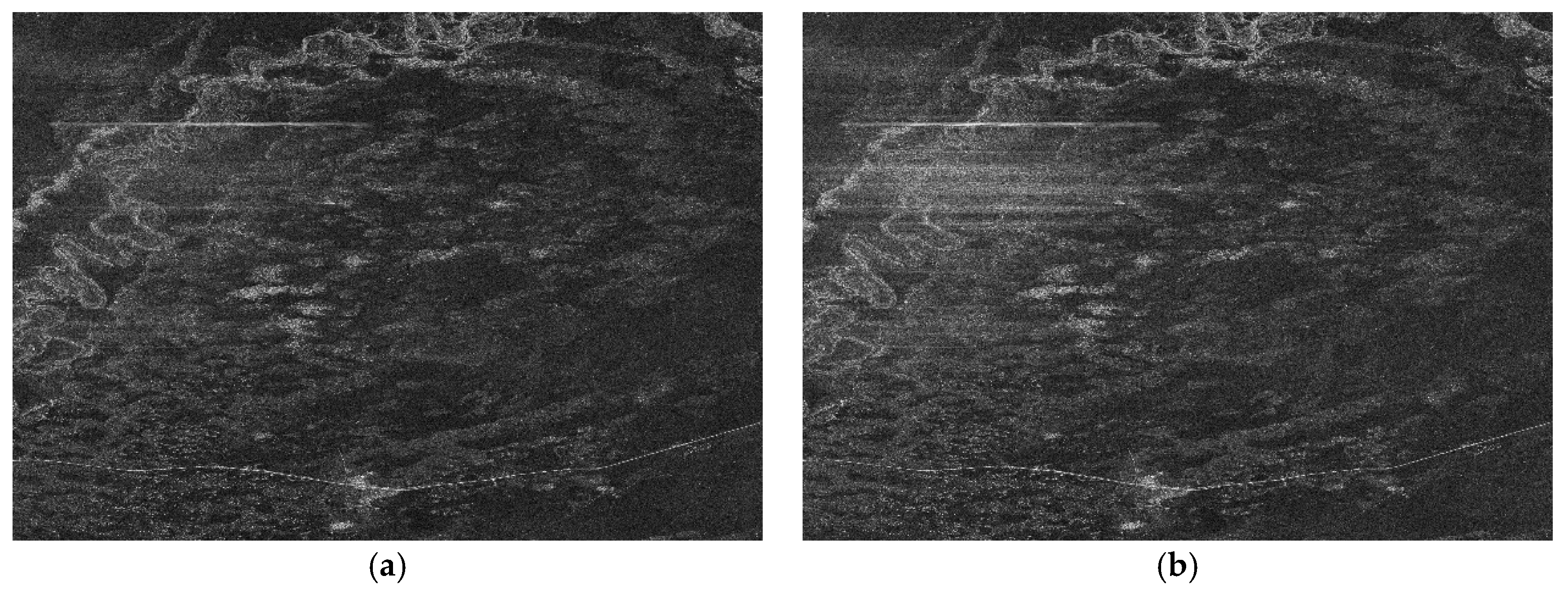
4. Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Harger, R.O. Synthetic Aperture Radar Systems: Theory and Design; H36-1; Academic Press: New York, NY, USA, 1970. [Google Scholar]
- Wu, Y.; Yu, Z.; Xiao, P.; Li, C. Azimuth ambiguity suppression based on minimum mean square error estimation. In Proceedings of the IEEE Geoscience and Remote Sensing Symposium, Milan, Italy, 26–31 July 2015; pp. 2425–2428. [Google Scholar]
- Guo, X.; Gao, Y.; Wang, K.; Liu, X. Suppression of Azimuth Ambiguities of Strong Point-Like Targets for Multichannel SAR Systems. IEEE Geosci. Remote Sens. Lett. 2017, 14, 1046–1050. [Google Scholar] [CrossRef]
- Wang, K.; Chen, J.; Yang, W.; Li, Z. Suppression of azimuth ambiguities in spaceborne stripmap SAR using accurate restoration modeling. In Proceedings of the IEEE Geoscience and Remote Sensing Symposium, Milan, Italy, 26–31 July 2015; pp. 2429–2432. [Google Scholar]
- Grifflths, H.D.; Mancini, P. Ambiguity Suppression in Sars Using Adaptive Array Techniques. In Proceedings of the International IEEE Geoscience and Remote Sensing Symposium (IGARSS ’91), Espoo, Finland, 3–6 June 1991; pp. 1015–1018. [Google Scholar]
- Krieger, G.; Huber, S.; Villano, M.; Younis, M.; Rommel, T.; Dekker, P.L.; de Almeida, F.Q.; Moreira, A. CEBRAS: Cross elevation beam range ambiguity suppression for high-resolution wide-swath and MIMO-SAR imaging. In Proceedings of the IEEE Geoscience and Remote Sensing Symposium, Milan, Italy, 26–31 July 2015; pp. 196–199. [Google Scholar]
- Yang, J.; Sun, G.; Wu, Y.; Xing, M. Range ambiguity suppression by azimuth phase coding in multichannel SAR systems. In Proceedings of the IET International Radar Conference, Xi’an, China, 14–16 April 2013; pp. 1–5. [Google Scholar]
- Guo, L.; Tan, X.; Dang, H. Range ambiguity suppression for multi-channel SAR system near singular points. In Proceedings of the IEEE Geoscience and Remote Sensing Symposium, Beijing, China, 10–15 July 2016; pp. 2086–2089. [Google Scholar]
- Krieger, G.; Gebert, N.; Moreira, A. Multidimensional Waveform Encoding: A New Digital Beamforming Technique for Synthetic Aperture Radar Remote Sensing. IEEE Trans. Geosci. Remote Sens. 2007, 46, 31–46. [Google Scholar] [CrossRef]
- Tomiyasu, K. Tutorial review of synthetic-aperture radar (SAR) with applications to imaging of the ocean surface. Proc. IEEE 1978, 66, 563–583. [Google Scholar] [CrossRef]
- Tomiyasu, K. Image processing of synthetic aperture radar range ambiguous signals. IEEE Trans. Geosci. Remote Sens. 1994, 32, 1114–1117. [Google Scholar] [CrossRef]
- Mittermayer, J.; Martinez, J.M. Analysis of range ambiguity suppression in SAR by up and down chirp modulation for point and distributed targets. In Proceedings of the IEEE Geoscience and Remote Sensing Symposium, Toulouse, France, 21–25 July 2003; pp. 4077–4079. [Google Scholar]
- Mo, H.; Zeng, Z. Investigation of multichannel ScanSAR with up and down chirp modulation for range ambiguity suppression. In Proceedings of the IEEE Geoscience and Remote Sensing Symposium, Beijing, China, 10–15 July 2016; pp. 1130–1133. [Google Scholar]
- Riché, V.; Méric, S.; Baudais, J.Y.; Pottier, E. Investigations on OFDM Signal for Range Ambiguity Suppression in SAR Configuration. IEEE Trans. Geosci. Remote Sens. 2014, 52, 4191–4197. [Google Scholar] [CrossRef]
- Pyne, B.; Ravindra, V.; Saito, H. An improved pulse repetition frequency selection scheme for synthetic aperture radar. In Proceedings of the IEEE Radar Conference, Paris, France, 9–11 September 2015; pp. 257–260. [Google Scholar]
- Lin, C.; Huang, P.; Wang, W.; Li, Y.; Xu, J. Unambiguous Signal Reconstruction Approach for SAR Imaging Using Frequency Diverse Array. IEEE Geosci. Remote Sens. Lett. 2017, 14, 1628–1632. [Google Scholar] [CrossRef]
- Xu, J.; Liao, G.; So, H.C. Space-Time Adaptive Processing with Vertical Frequency Diverse Array for Range-Ambiguous Clutter Suppression. IEEE Trans. Geosci. Remote Sens. 2016, 54, 5352–5364. [Google Scholar] [CrossRef]
- Curlander, J.C.; Mcdonough, R.N. Synthetic Sperture Radar: Systems and Signal Processing; Publishing House of Electronics Industry: Beijing, China, 2006. [Google Scholar]
- Cumming, I.G.; Wong, F.H. Digital Processing of Synthetic Aperture Radar Data: Algorithms and Implementation; Publishing House of Electronics Industry: Beijing, China, 2012. [Google Scholar]
- Wei, Z.Q. Synthetic Aperture Radar Satellite; Science Publishing Company: Beijing, China, 2001. [Google Scholar]
- Zhang, S.; Liu, Y.; Li, X. Fast Entropy Minimization Based Autofocusing Technique for ISAR Imaging. IEEE Trans. Signal Process. 2015, 63, 3425–3434. [Google Scholar] [CrossRef]
- Yuan, X.K. Target location method for synthetic aperture radar satellite. Spacecr. Eng. 1998, 232–238. [Google Scholar]
- Hao, C.P. A Two Parameter CFAR Detector in K-Distribution Clutter. J. Electron. Inf. Technol. 2007, 29, 756–759. [Google Scholar]
- Ai, J.Q.; Qi, X.Y.; Yu, W.D. Improved two parameter CFAR ship detection algorithm in SAR images. J. Electron. Inf. Technol. 2009, 31, 2881–2885. [Google Scholar]
- Xu, J.; Ma, Y.; Li, J.; Peng, Y. Optimizing CFAR-based SAR Target Detection Algorithm for DSP Platform. In Proceedings of the IEEE Sixth International Conference on Instrumentation & Measurement, Computer, Communication and Control, Harbin, China, 21–23 July 2016; pp. 492–495. [Google Scholar]
- Leng, X.; Ji, K.; Yang, K.; Zhou, H. A Bilateral CFAR Algorithm for Ship Detection in SAR Images. IEEE Geosci. Remote Sens. Lett. 2015, 12, 1536–1540. [Google Scholar]
- Chen, P.; Yang, J.; Wang, J. Marine targets detection using GF-3 SAR data. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Fort Worth, TX, USA, 23–28 July 2017; pp. 1978–1980. [Google Scholar]
- Greet, L.D.; Harris, S. Detection and clutter suppression using fusion of conventional CFAR and two parameter CFAR. In Proceedings of the IEEE International Conference on Electronics Computer Technology, Kanyakumari, India, 8–10 April 2011; pp. 216–219. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Radar Parameter | Value | Radar Parameter | Value |
|---|---|---|---|
| λ | 0.055517 m | PRF | 1292.0768 |
| Transmit Band | 40 MHz | Look angle | 38.91° |
| Sample rate | 66.667 MHz | Incidence angle | 44.64° |
| Modulation rate | 1.6006 × 1012 | Near range | 1001.7 km |
| Satellite velocity | (−1677.18, 5525.42, −4885.91) | Reference range | 1015.3 km |
| Satellite position | (−2,870,758.09, 3,815,169.12, 5,287,687.27) | Center range | 1015.3 km |
| Target position | 118.4872° E, 49.2979° N | Target radius | 6,368,250 m |
| Equatorial radius | 6,378,140 m | Polar radius | 6,356,755 m |
| equivalent velocity | 7097.4 m/s | Fdc | 6.508994 |
| Parameter | Value |
|---|---|
| Target window length | 2 |
| Protection window length | 8 |
| Background window length | 32 |
| t1 | 2.5~3.5 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wen, X.; Qiu, X.; Han, B.; Ding, C.; Lei, B.; Chen, Q. A Range Ambiguity Suppression Processing Method for Spaceborne SAR with Up and Down Chirp Modulation. Sensors 2018, 18, 1454. https://doi.org/10.3390/s18051454
Wen X, Qiu X, Han B, Ding C, Lei B, Chen Q. A Range Ambiguity Suppression Processing Method for Spaceborne SAR with Up and Down Chirp Modulation. Sensors. 2018; 18(5):1454. https://doi.org/10.3390/s18051454
Chicago/Turabian StyleWen, Xuejiao, Xiaolan Qiu, Bing Han, Chibiao Ding, Bin Lei, and Qi Chen. 2018. "A Range Ambiguity Suppression Processing Method for Spaceborne SAR with Up and Down Chirp Modulation" Sensors 18, no. 5: 1454. https://doi.org/10.3390/s18051454
APA StyleWen, X., Qiu, X., Han, B., Ding, C., Lei, B., & Chen, Q. (2018). A Range Ambiguity Suppression Processing Method for Spaceborne SAR with Up and Down Chirp Modulation. Sensors, 18(5), 1454. https://doi.org/10.3390/s18051454