Theory and Measurement of Signal-to-Noise Ratio in Continuous-Wave Noise Radar


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
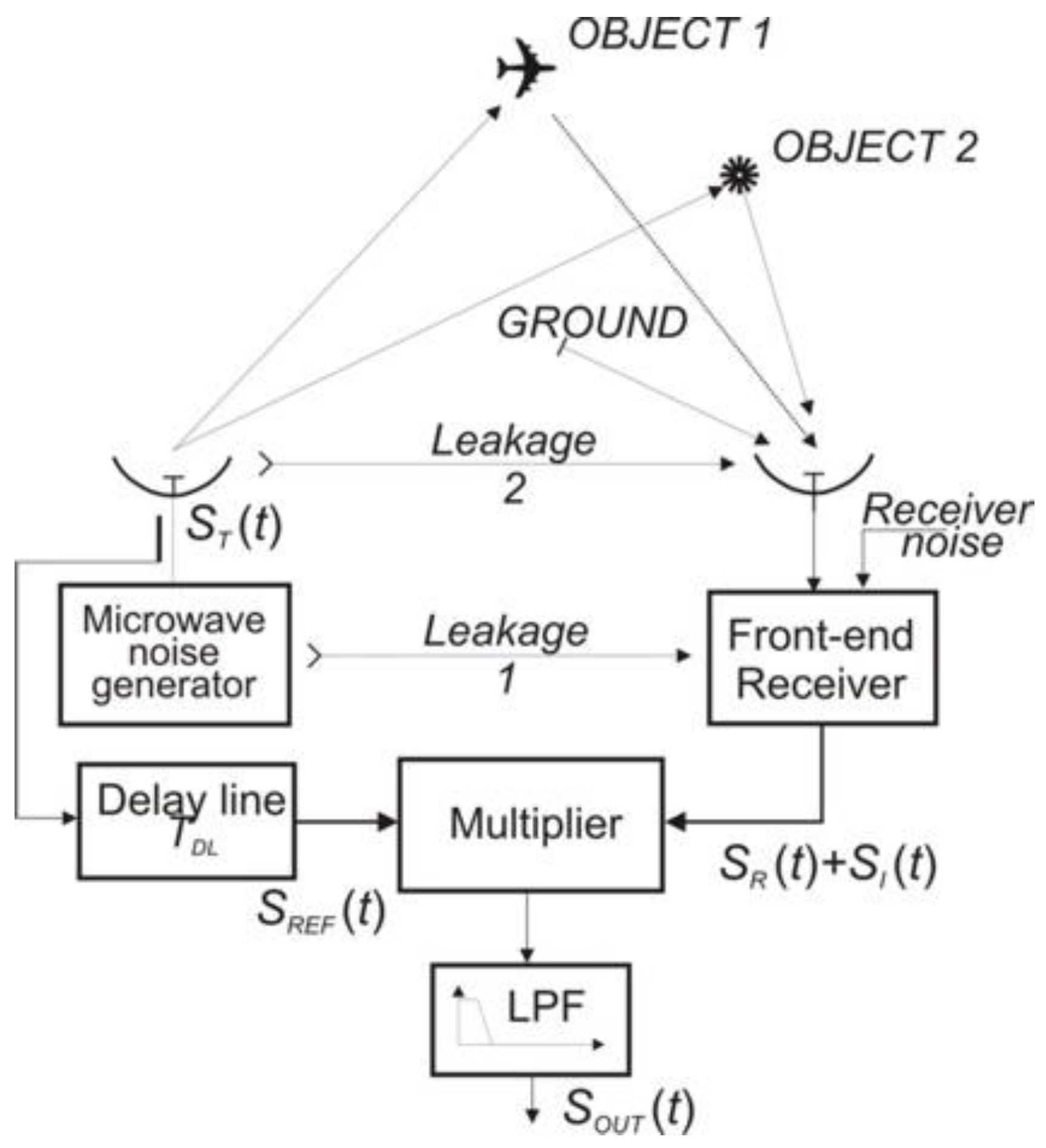
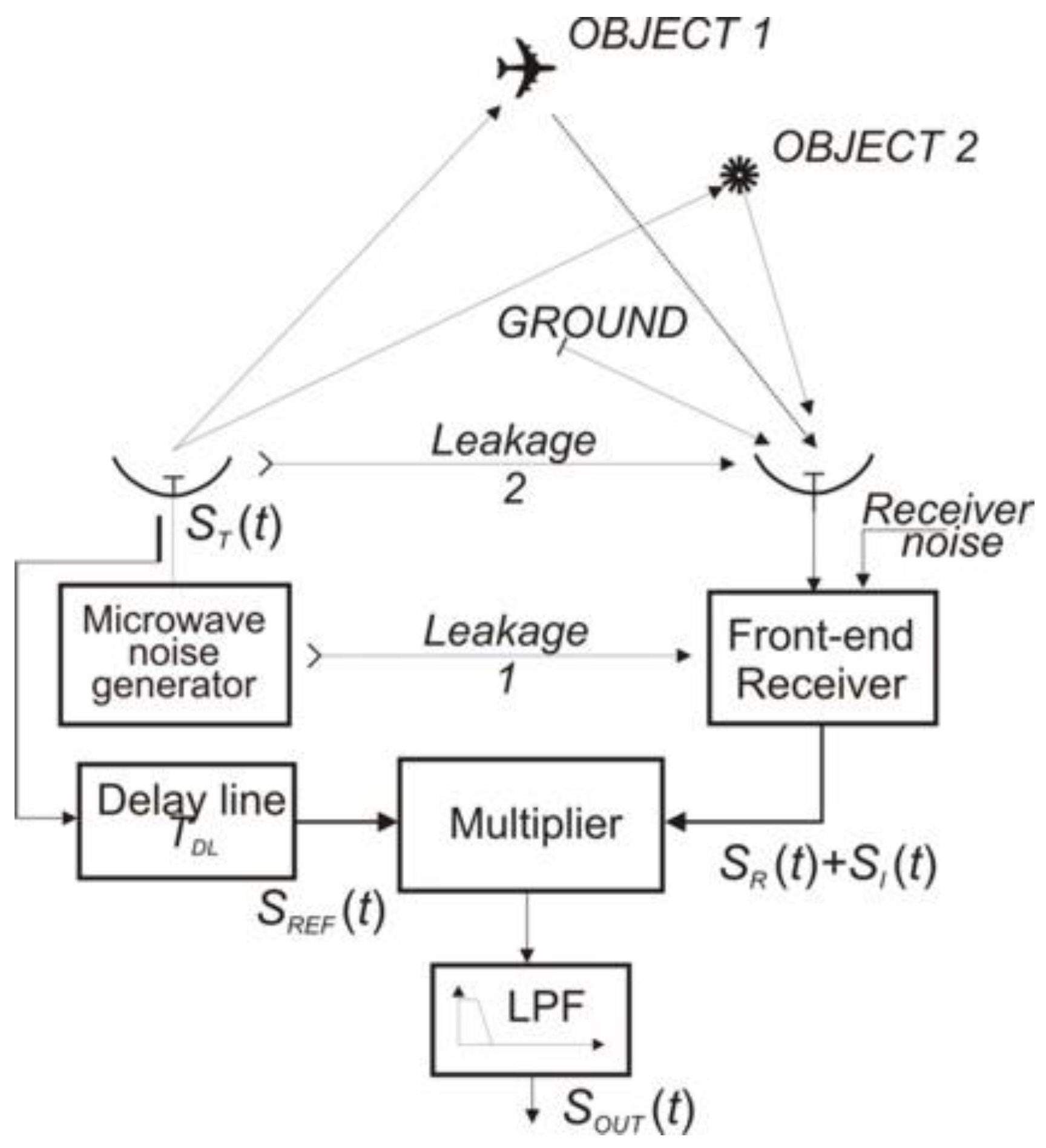
2. Signals in a Noise Radar
- leakage 1—internal leakage of a signal from transmitter circuits to the receiver circuits with the power PLC.
- leakage 2—leakage of a signal between the transmitting and receiving antennas with the power PLA.
- interfering signal—signal from Object 2 with the power PR2 and signals reflected from the ground and other elements on its surface at different distances from the radar with the total power PC a so-called clutter.
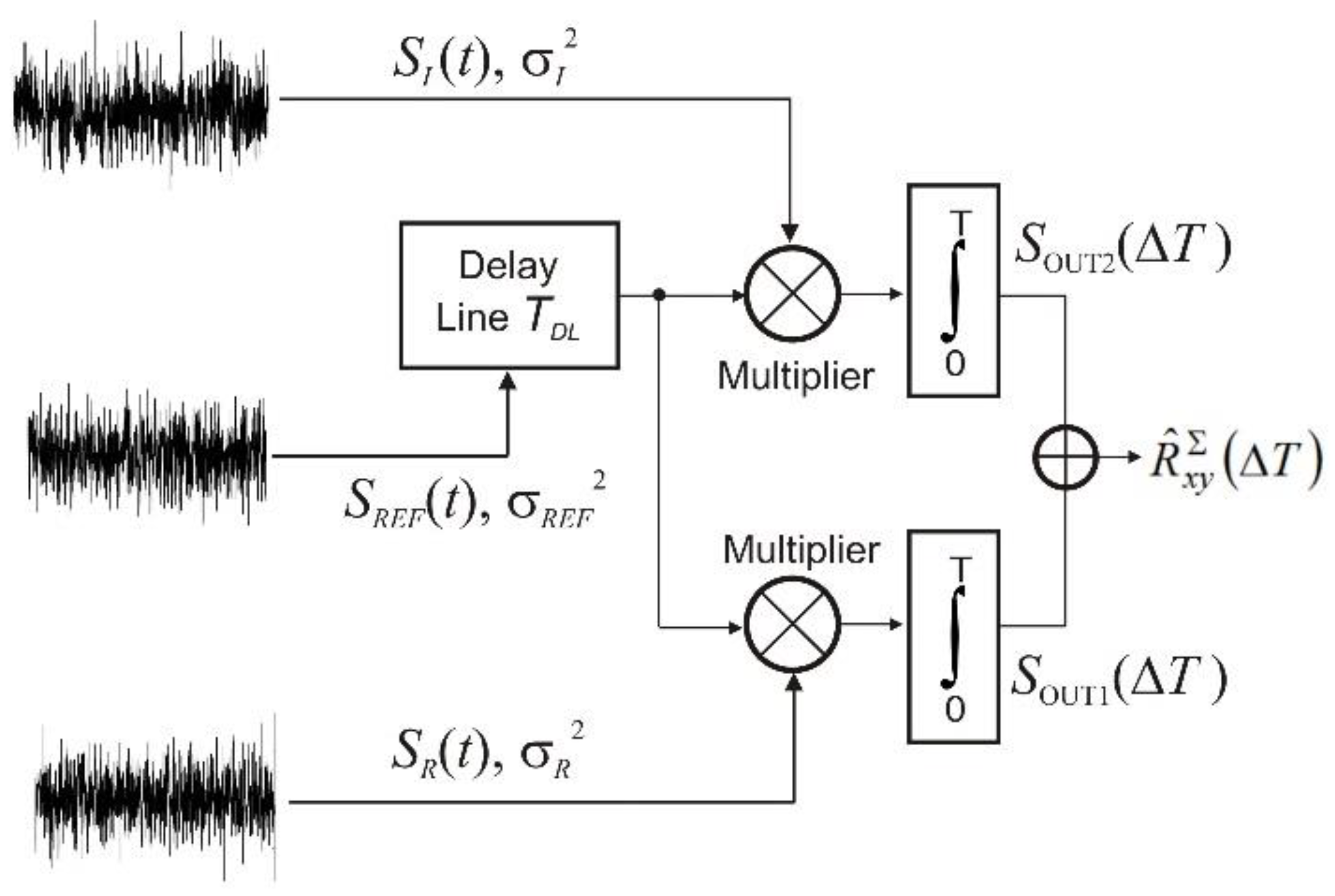
3. Noise Signal Correlation Function
3.1. The Variance of the Random Signal Correlation Function Estimator
3.2. Noise at the Correlation Detector Output
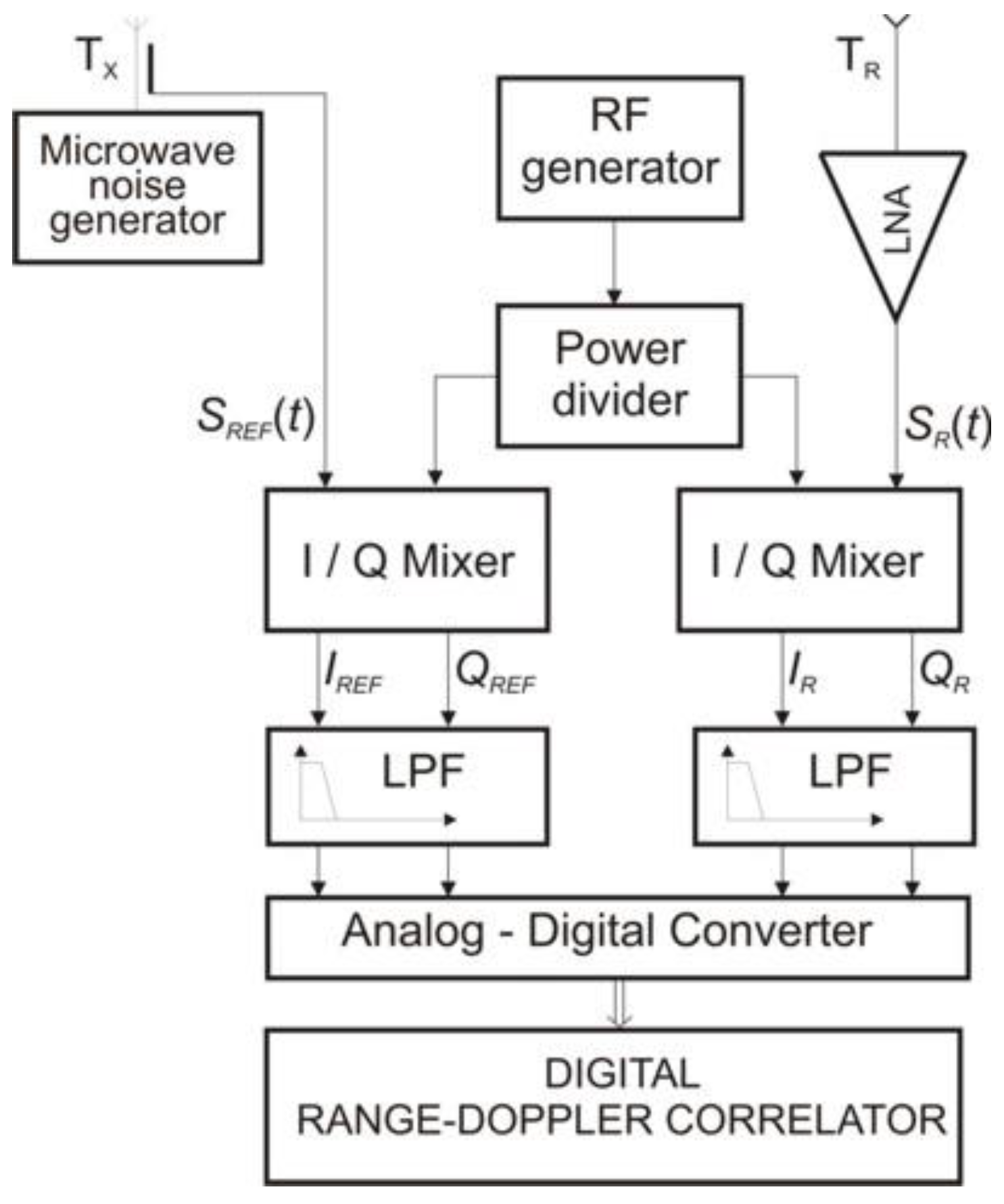
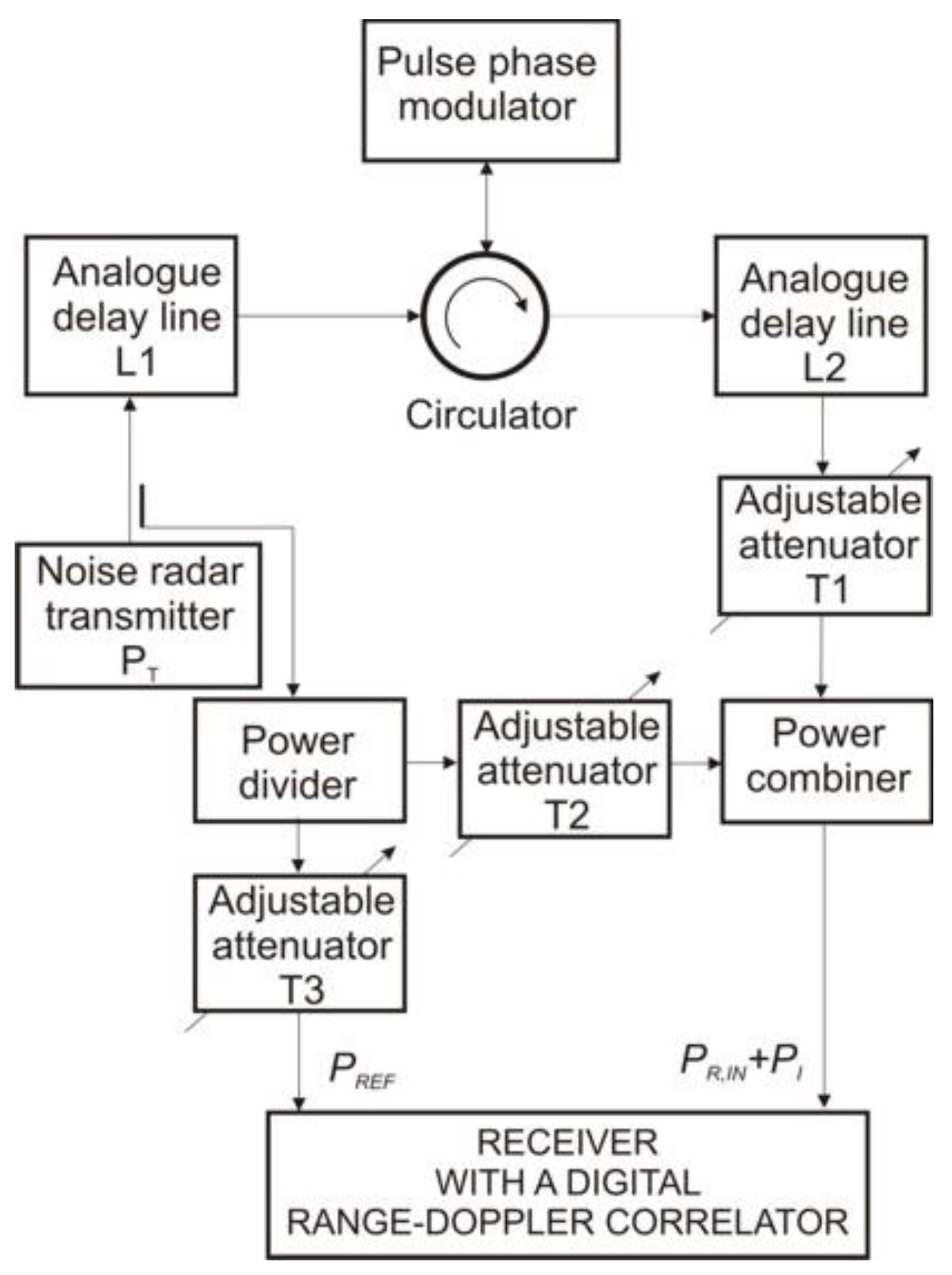
4. Experimental Measurements
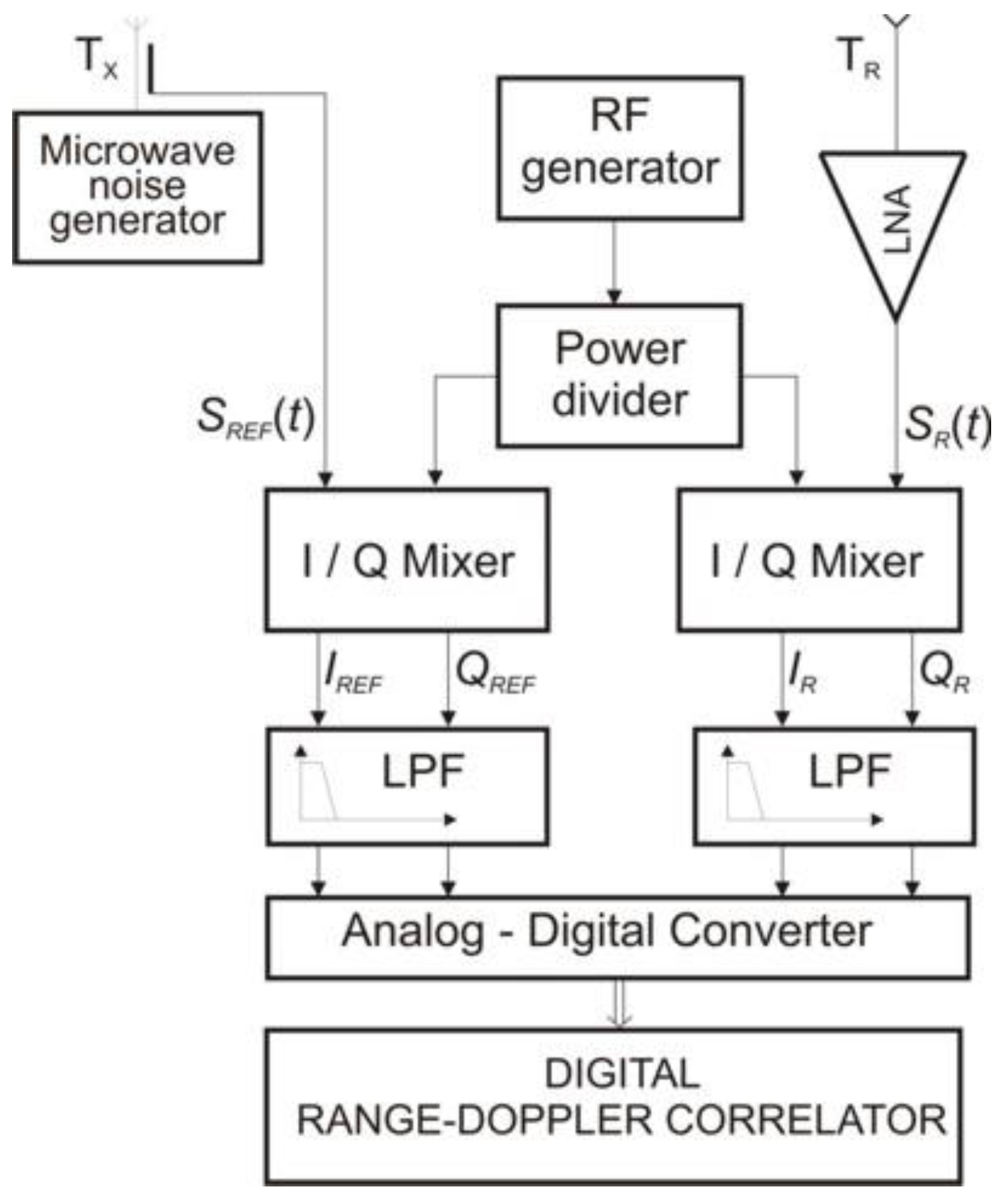
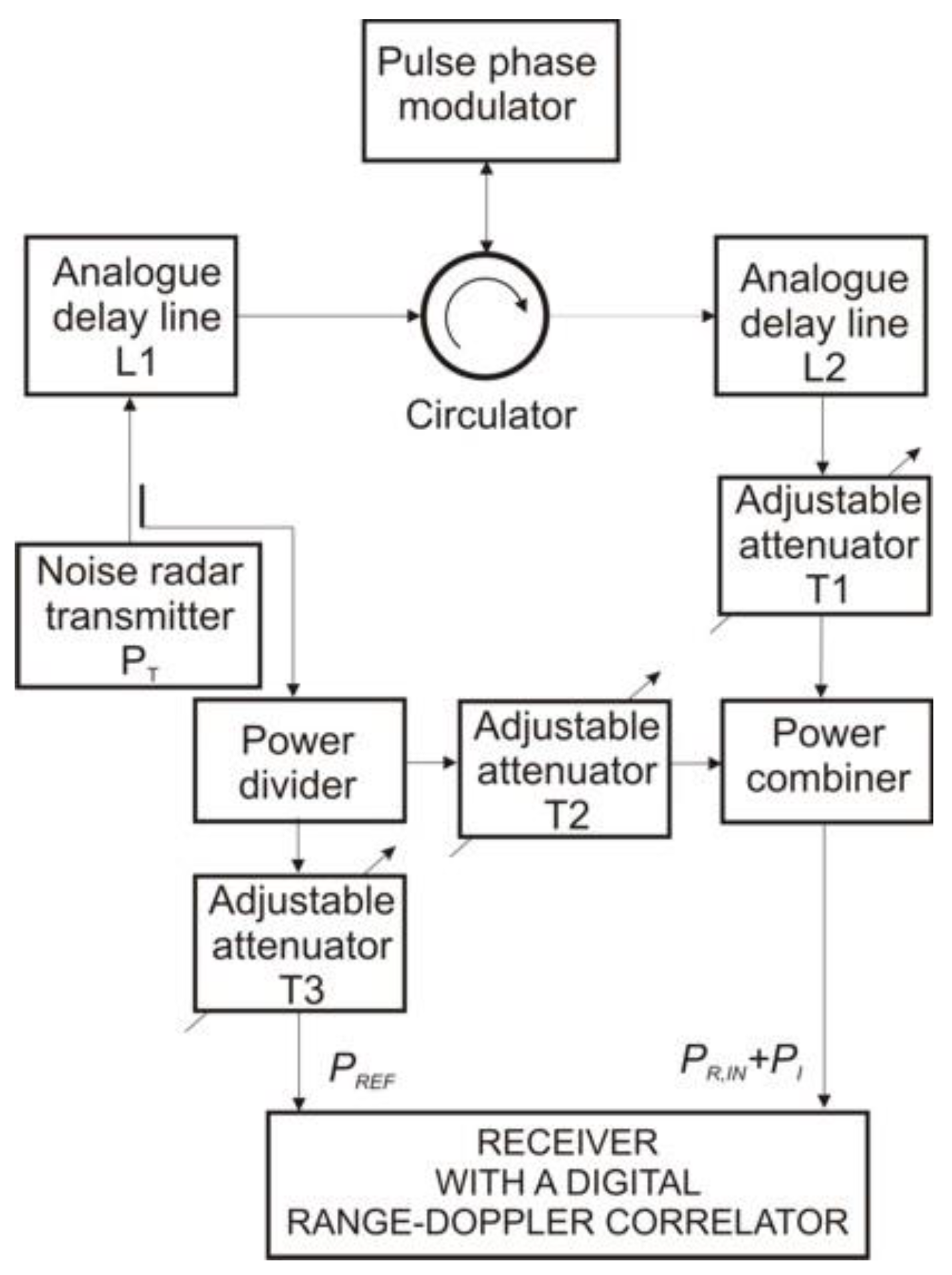
4.1. Measuring System
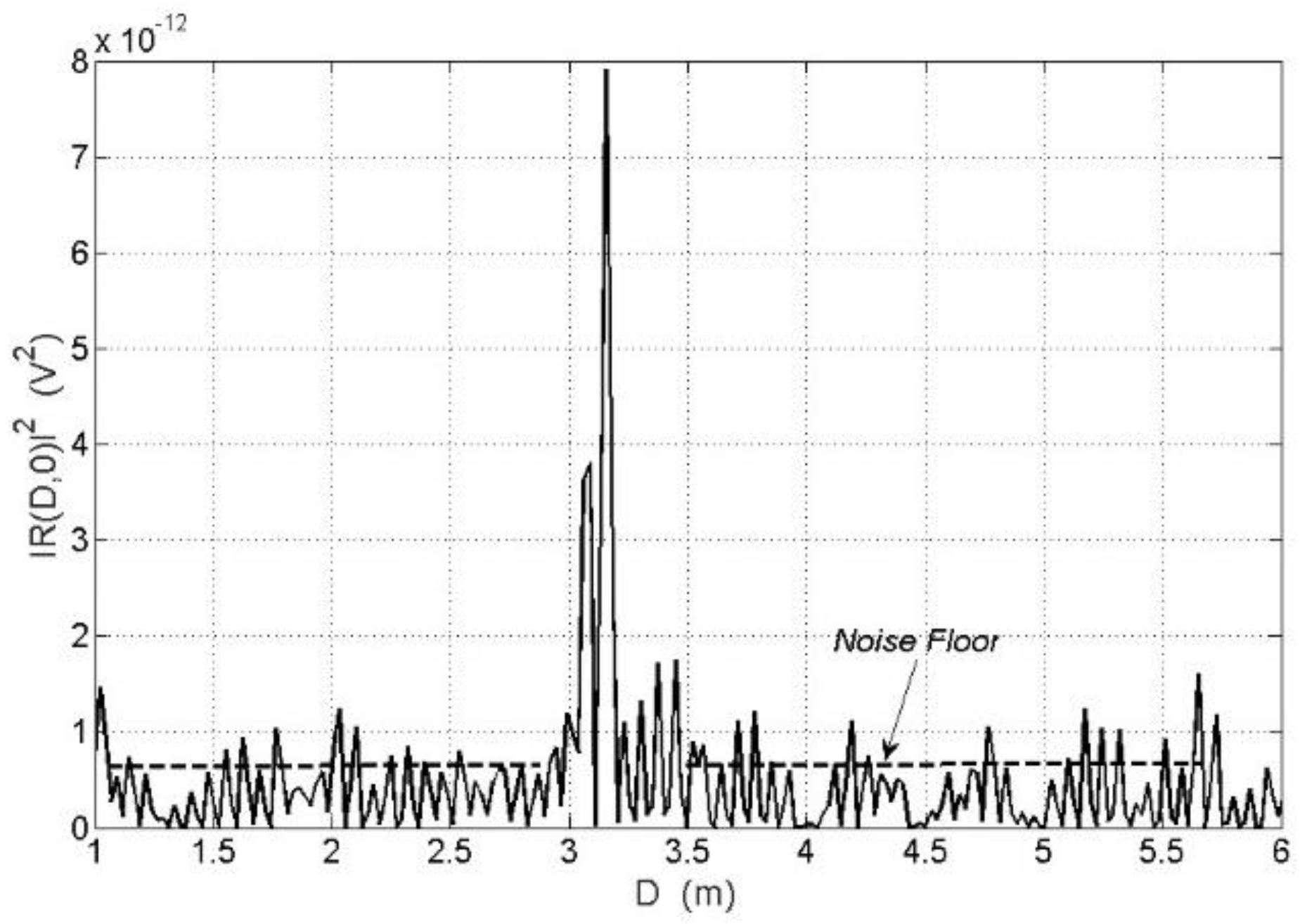
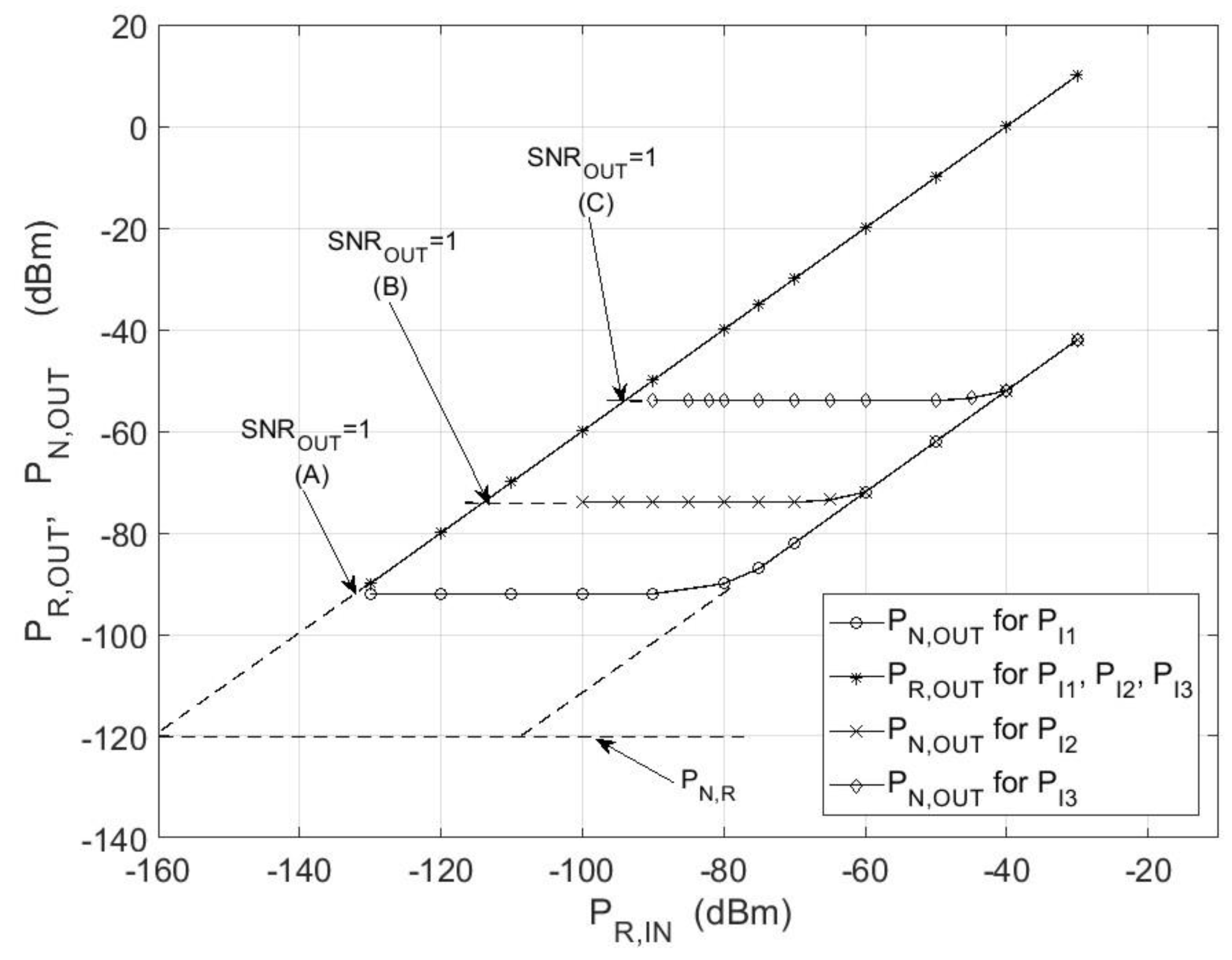
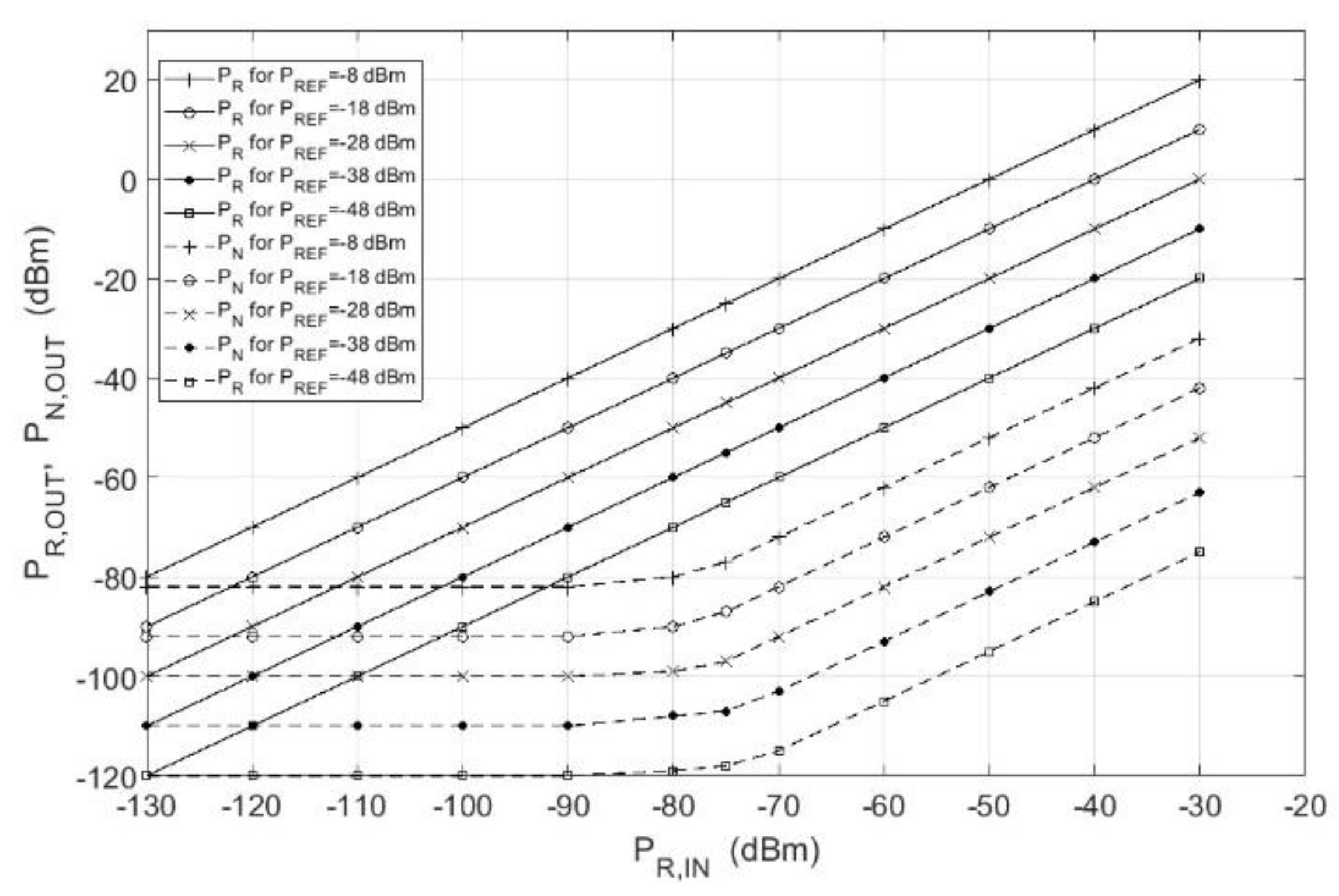
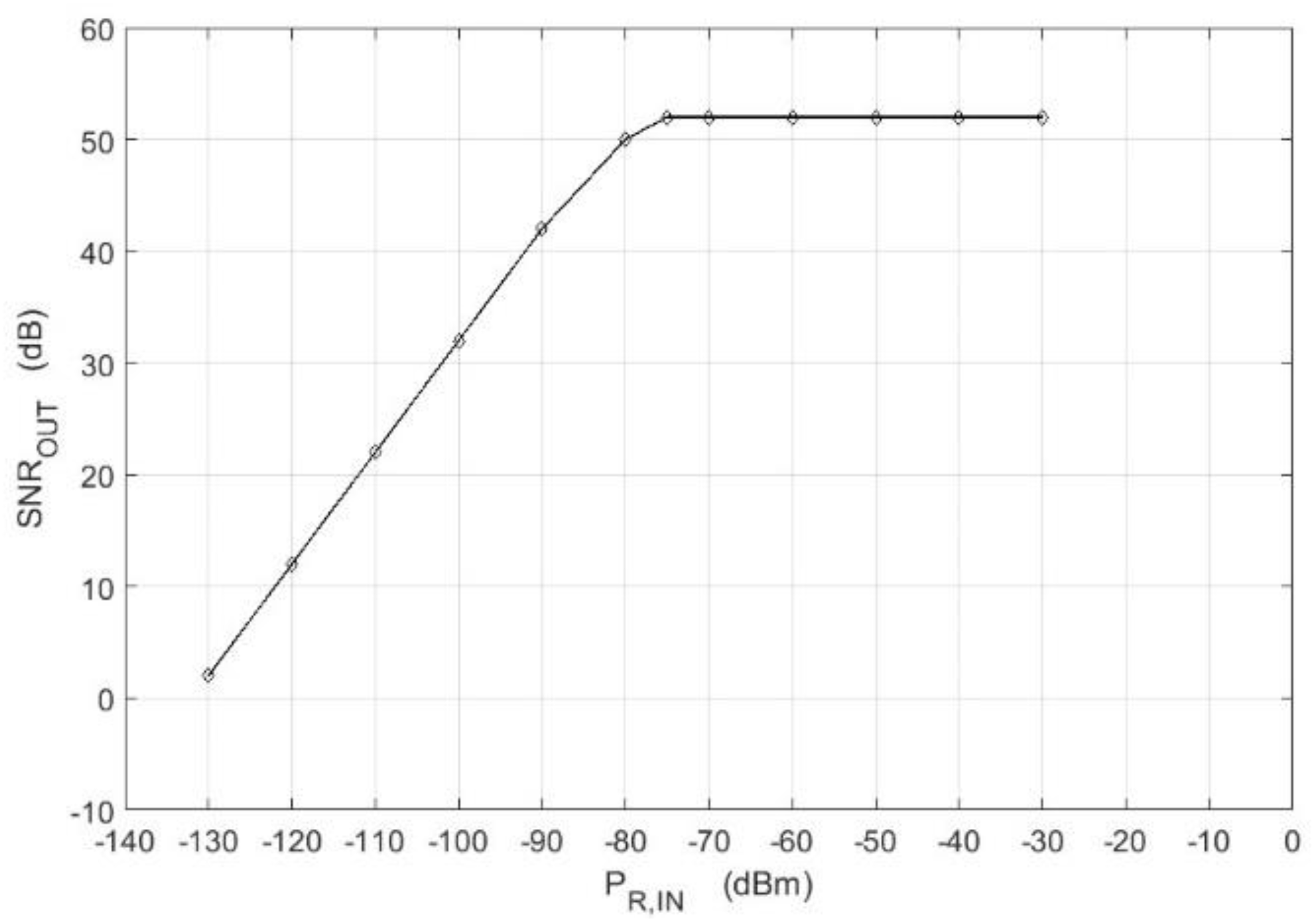
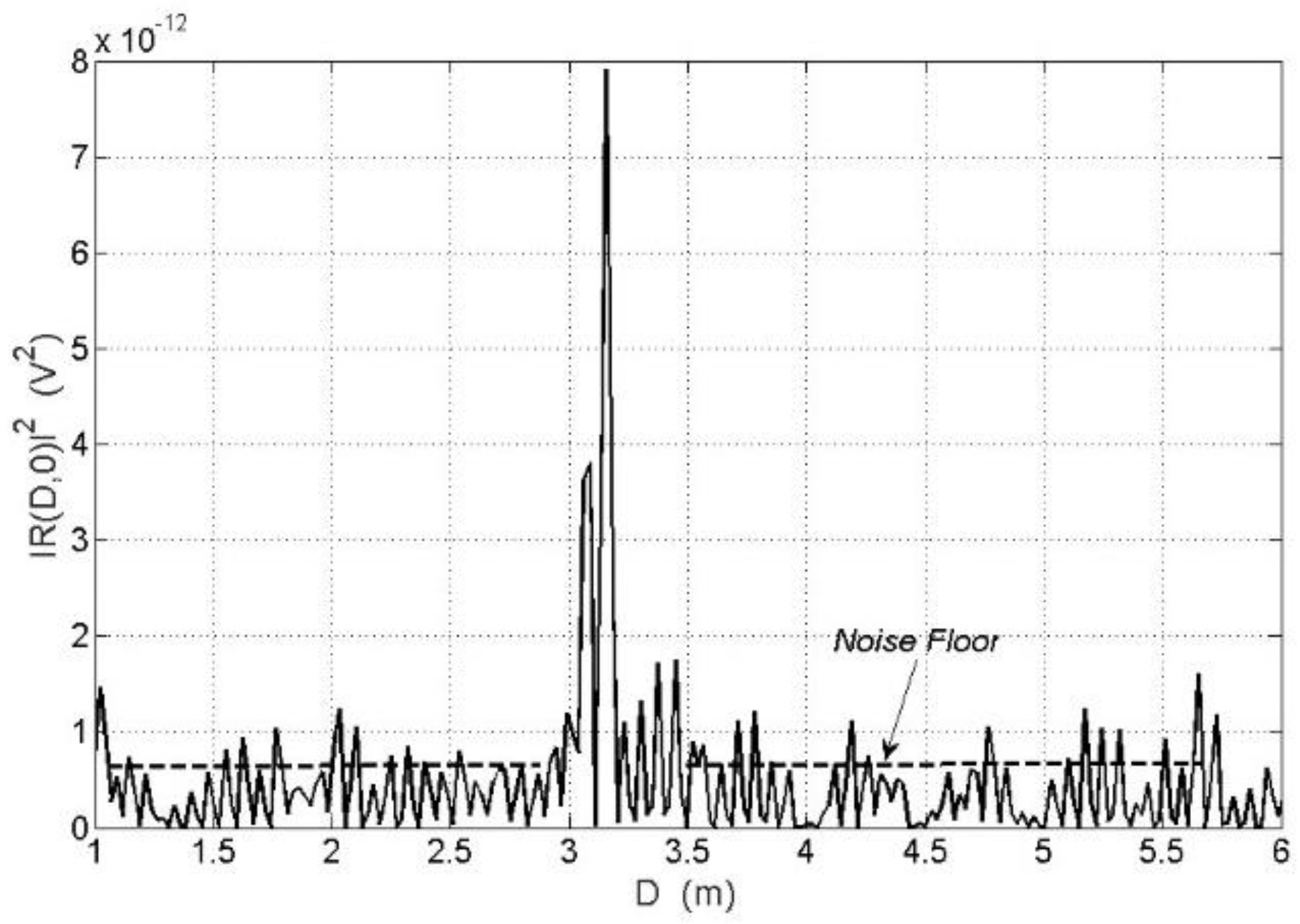
4.2. Measurement Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Naryanan, R.M.; Xu, Y.; Hoffmeyer, P.D.; Curtis, J.O. Design, performance, and applications of a coherent ultrawideband random noise radar. Opt. Eng. 1998, 37, 1855–1869. [Google Scholar] [CrossRef]
- Susek, W.; Stec, B. Broadband microwave correlator of noise signals. Metrol. Meas. Syst. 2010, 17, 289–298. [Google Scholar] [CrossRef]
- Narayanan, R.M.; Dawood, M. Doppler estimation using a coherent ultra wide-band random noise radar. IEEE Trans. Antennas Propagat. 2000, 48, 868–878. [Google Scholar] [CrossRef]
- Dawood, M.; Narayanan, R.M. Receiver operating characteristics for the coherent UWB random noise radar. IEEE Trans. Aerosp. Electron. Syst. 2001, 37, 586–594. [Google Scholar] [CrossRef]
- Susek, W.; Stec, B.; Rećko, C. Noise radar with microwave correlation receiver. Acta Phys. Pol. A 2011, 119, 483–487. [Google Scholar] [CrossRef]
- Susek, W.; Stec, B. Through-the-Wall Detection of Human Activities Using a Noise Radar With Microwave Quadrature Correlator. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 759–764. [Google Scholar] [CrossRef]
- Tarchi, D.; Lukin, K.; Fortuny-Guasch, J.; Mogyla, A.; Vyplavin, P.; Sieber, A. SAR Imaging with Noise Radar. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 1214–1225. [Google Scholar] [CrossRef]
- Li, Z.; Narayanan, R. Doppler visibility of coherent ultrawideband random noise radar systems. IEEE Trans. Aerosp. Electron. Syst. 2006, 42, 904–916. [Google Scholar] [CrossRef]
- Xu, Y.; Narayanan, R.M.; Xu, X.; Curtis, J.O. Polarimetric processing of coherent random noise radar data for buried object detection. IEEE Trans. Geosci. Remote Sens. 2001, 39, 467–478. [Google Scholar] [CrossRef]
- Lai, C.P.; Narayanan, R.M. Ultrawideband random noise radar design for through-wall surveillance. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 1716–1730. [Google Scholar] [CrossRef]
- Meller, M. Fast Clutter Cancellation for Noise Radars via Waveform Design. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 2327–2334. [Google Scholar] [CrossRef]
- Kulpa, J.S. Noise radar sidelobe suppression algorithm using mismatched filter approach. Int. J. Microw. Wirel. Technol. 2016, 8, 865–869. [Google Scholar] [CrossRef]
- Kulpa, J.S.; Maslikowski, L.; Malanowski, M. Filter-Based Design of Noise Radar Waveform with Reduced Sidelobes. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 816–825. [Google Scholar] [CrossRef]
- Axelsson, S.R.J. Noise radar for range/Doppler processing and digital beamforming using low-bit ADC. IEEE Trans. Geosci. Remote Sens. 2003, 41, 2703–2720. [Google Scholar] [CrossRef]
- Haykin, S. Random Processes in Communication Systems, 4th ed.; John Wiley &Sons Inc.: New York, NY, USA, 2001; pp. 66–67. [Google Scholar]
- Bendat, J.S.; Piersol, A.G. Statistical Errors in Basic Estimates in Random Data: Analysis and Measurement Procedures, 2nd ed.; Wiley Interscience: New York, NY, USA, 1971. [Google Scholar]

© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Stec, B.; Susek, W. Theory and Measurement of Signal-to-Noise Ratio in Continuous-Wave Noise Radar. Sensors 2018, 18, 1445. https://doi.org/10.3390/s18051445
Stec B, Susek W. Theory and Measurement of Signal-to-Noise Ratio in Continuous-Wave Noise Radar. Sensors. 2018; 18(5):1445. https://doi.org/10.3390/s18051445
Chicago/Turabian StyleStec, Bronisław, and Waldemar Susek. 2018. "Theory and Measurement of Signal-to-Noise Ratio in Continuous-Wave Noise Radar" Sensors 18, no. 5: 1445. https://doi.org/10.3390/s18051445
APA StyleStec, B., & Susek, W. (2018). Theory and Measurement of Signal-to-Noise Ratio in Continuous-Wave Noise Radar. Sensors, 18(5), 1445. https://doi.org/10.3390/s18051445