A Sparse-Driven Anti-Velocity Deception Jamming Strategy Based on Pulse-Doppler Radar with Random Pulse Initial Phases


Abstract
:1. Introduction
2. Problem Formulation
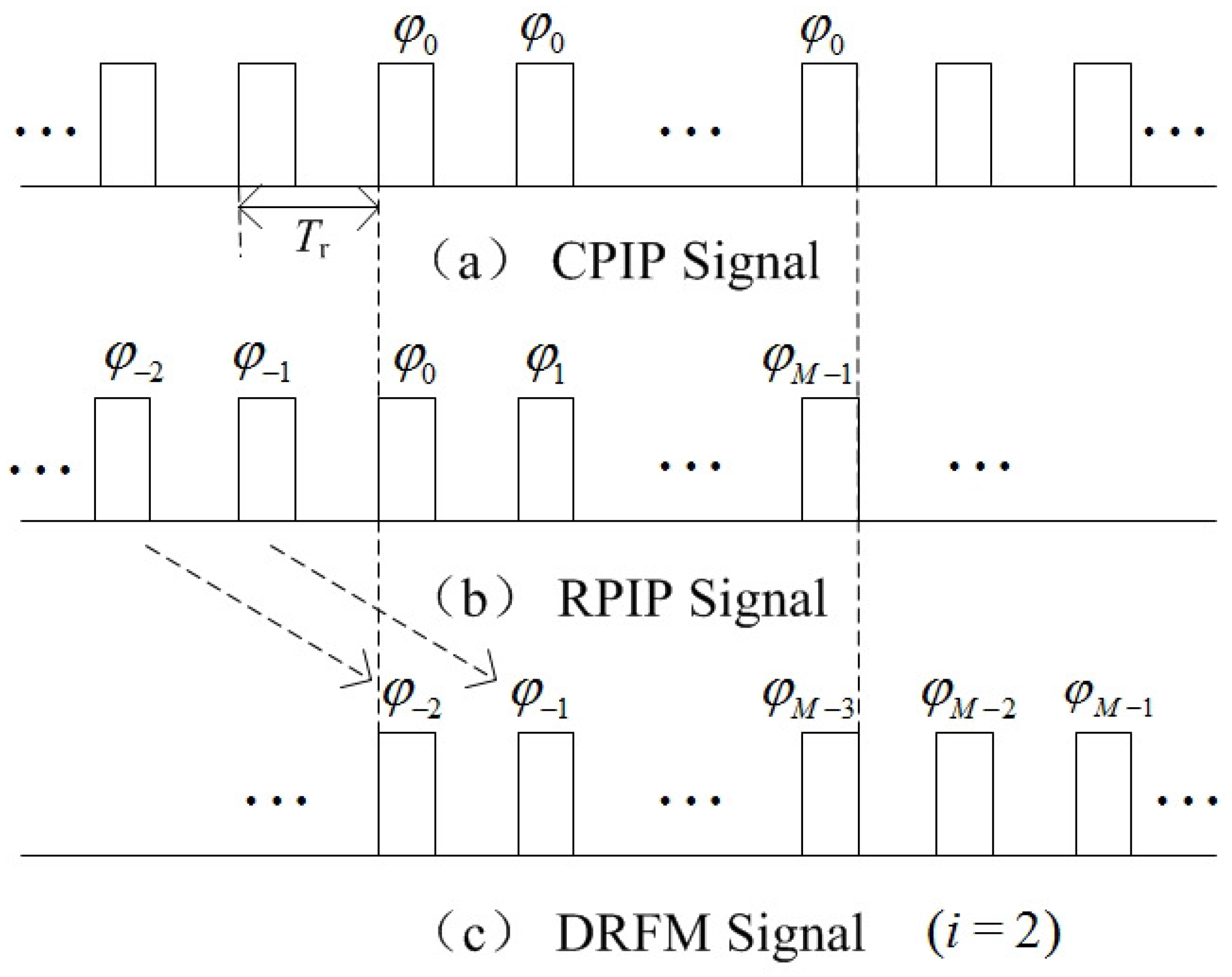
2.1. Transmitted Signal and Target Echo
2.2. Velocity False Target Jamming Signal
3. An ECCM Strategy Based on Sparse Representation Theory
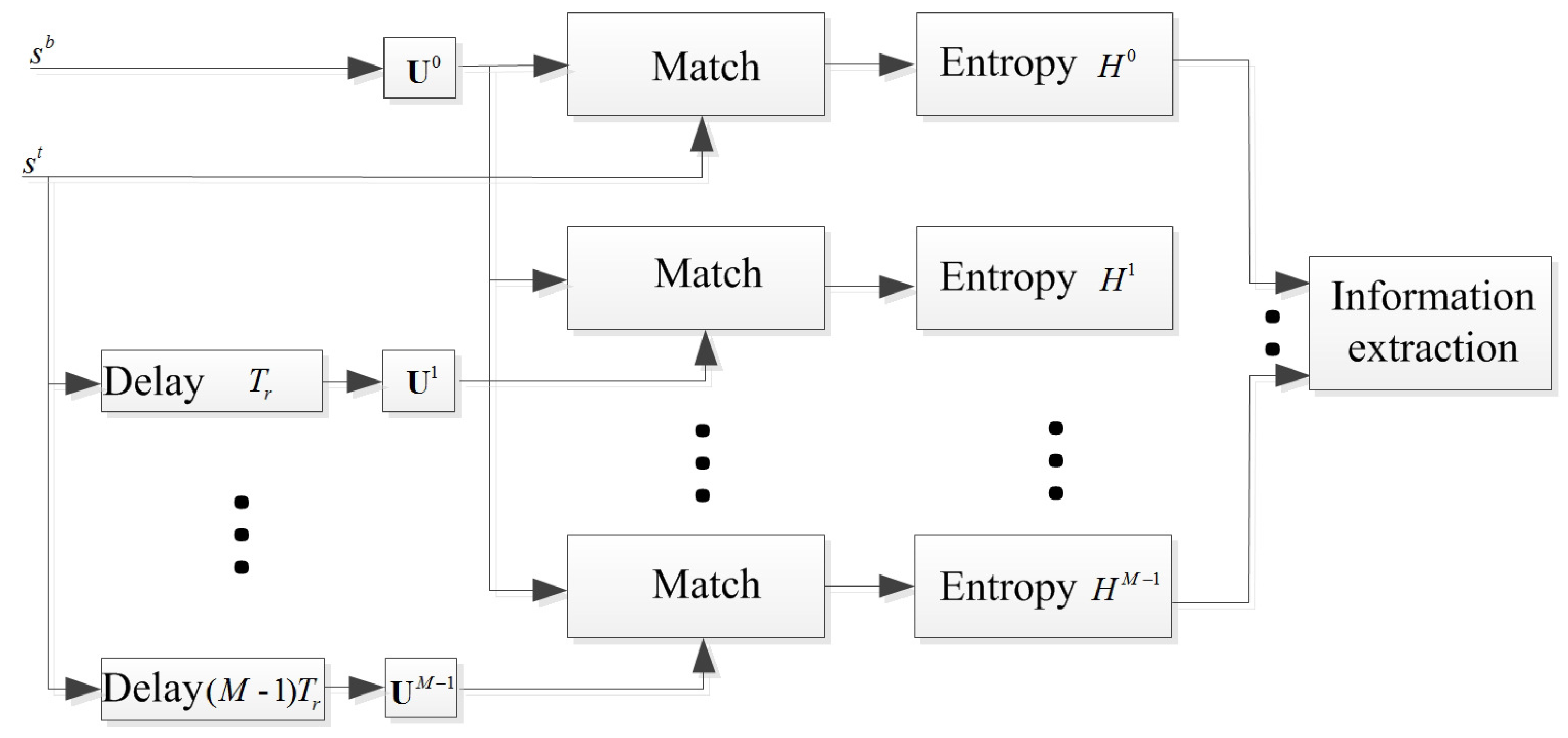
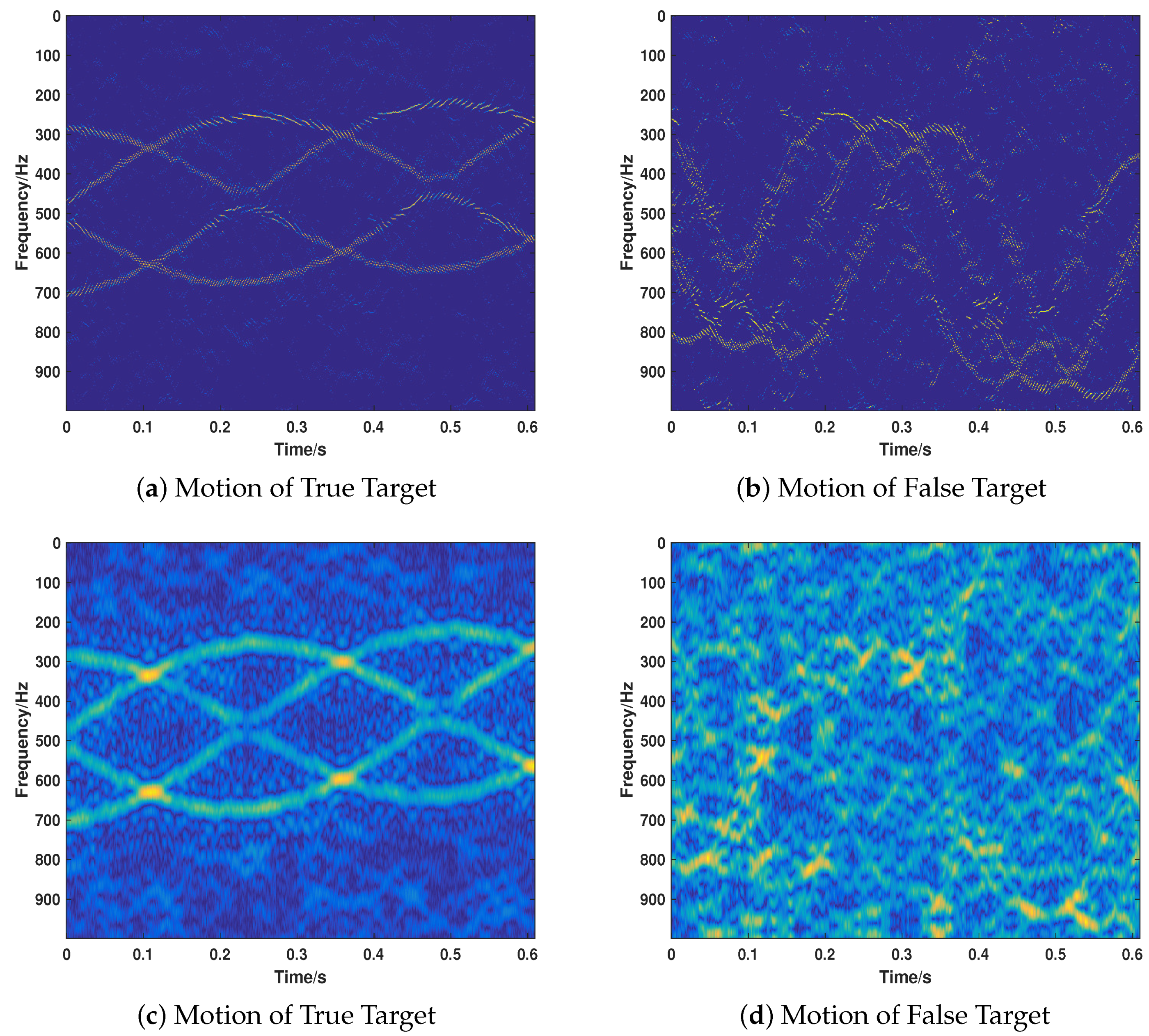
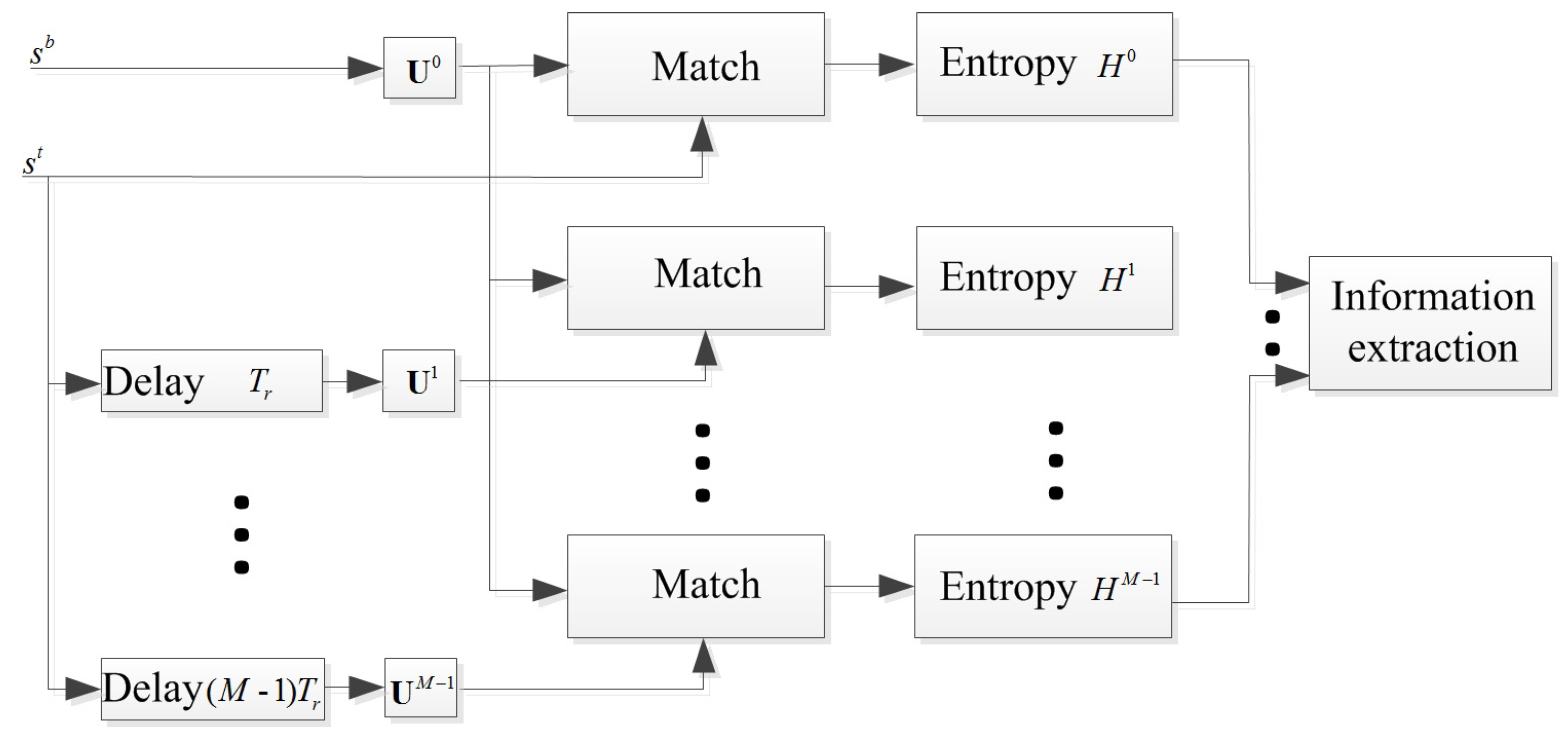
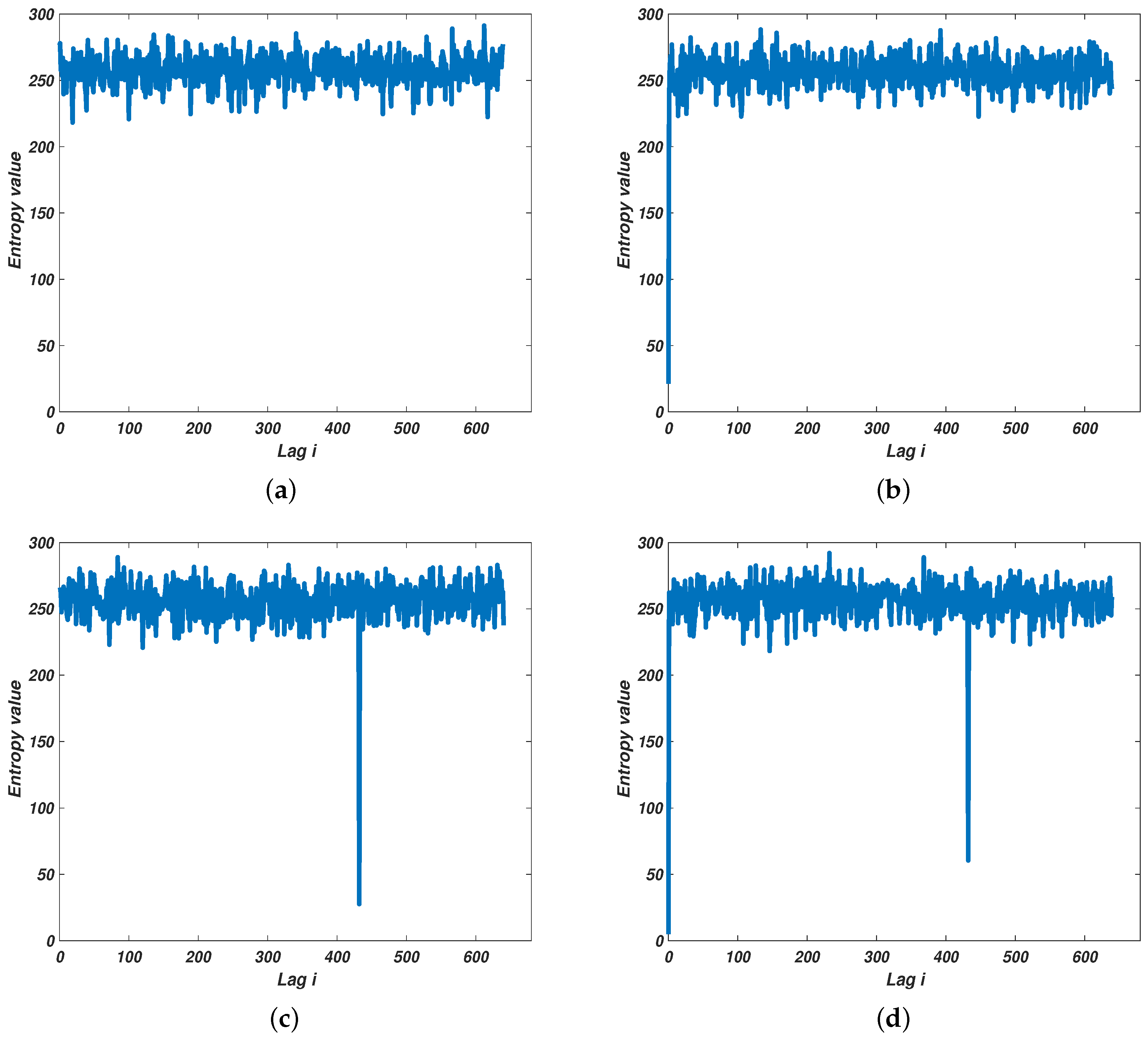
3.1. Information Extraction Based on Entropy by Multi-Channel Processing
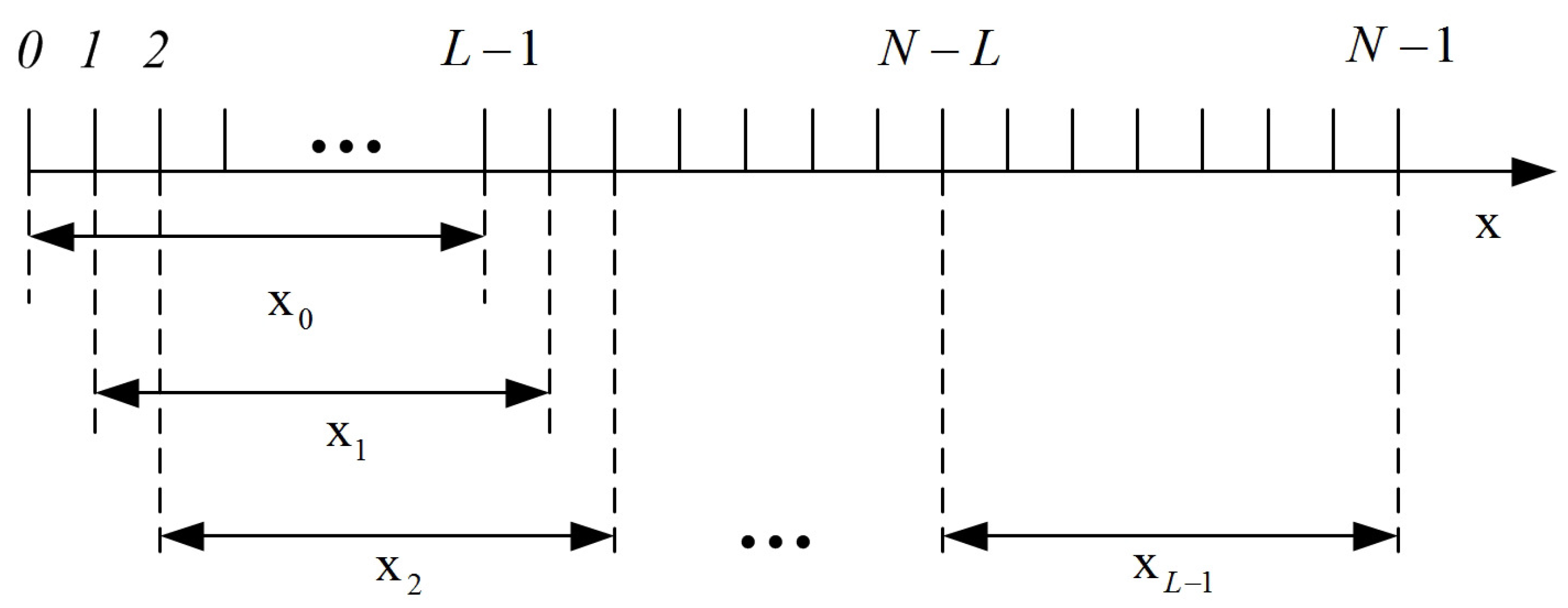
3.2. Motion Parameters Separation and Recovery Based on Sparse Representation Theory
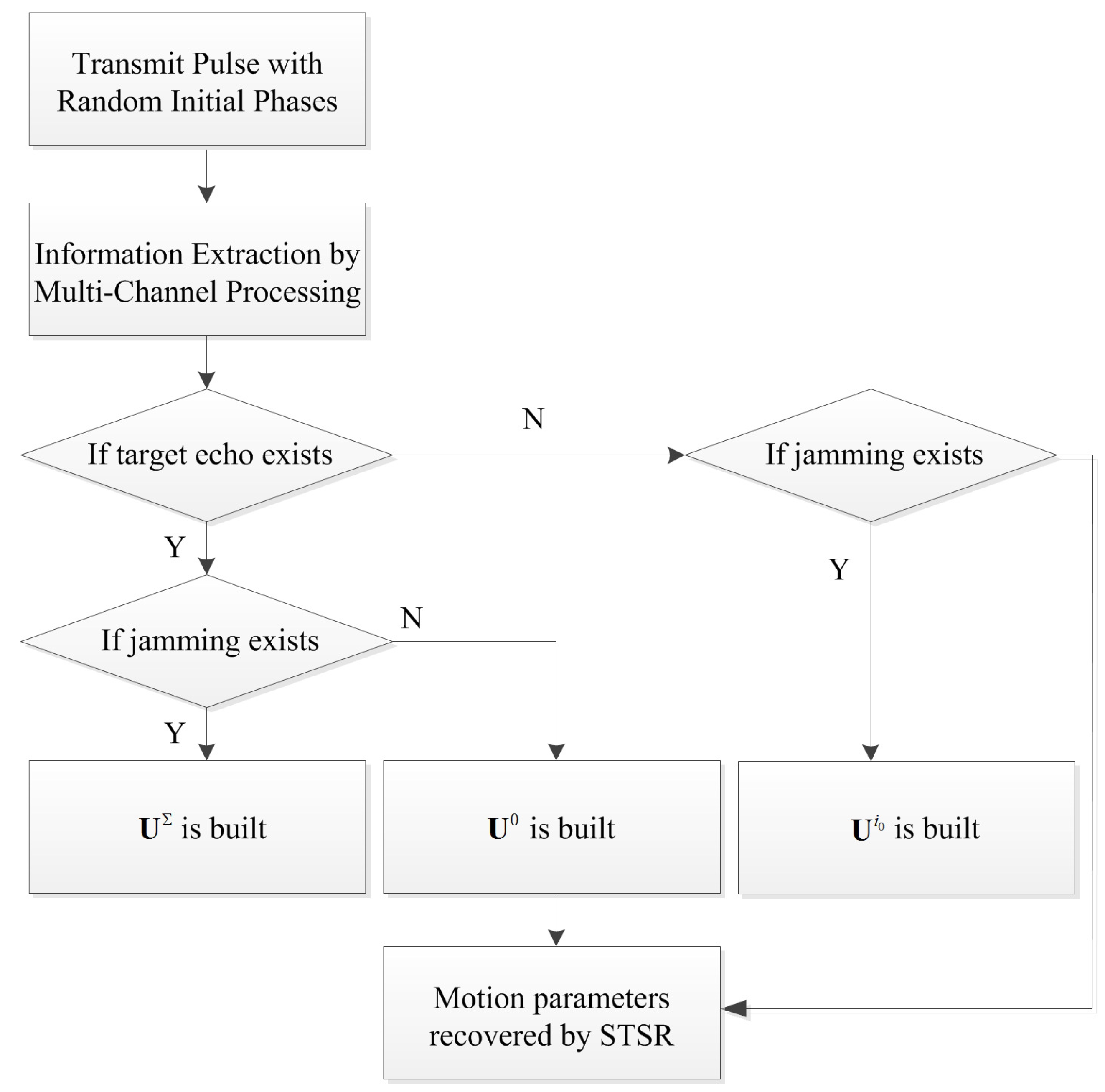
3.3. The Working Flow of the Anti-Velocity Deception Jamming Strategy
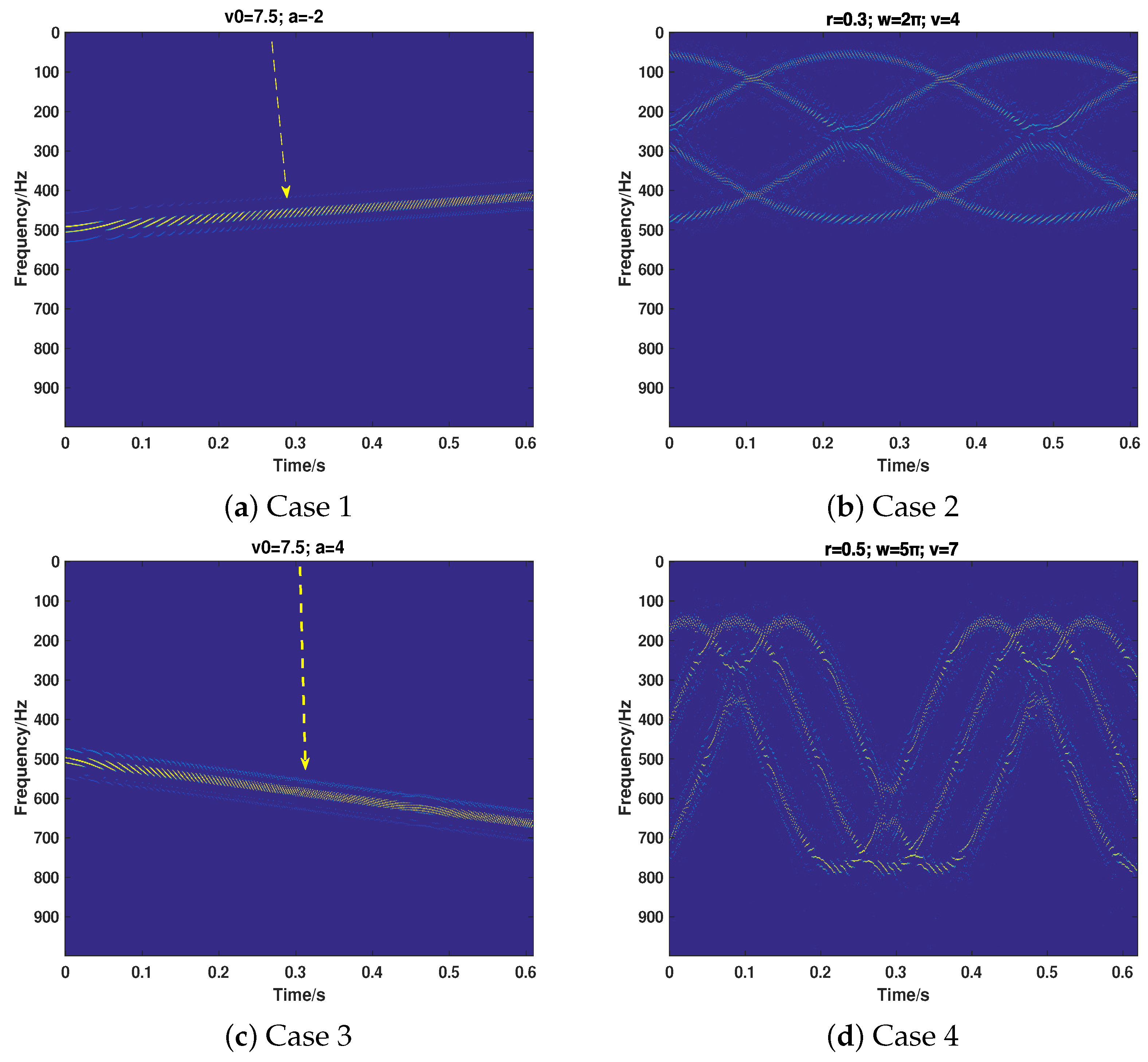
4. Numerical Simulations
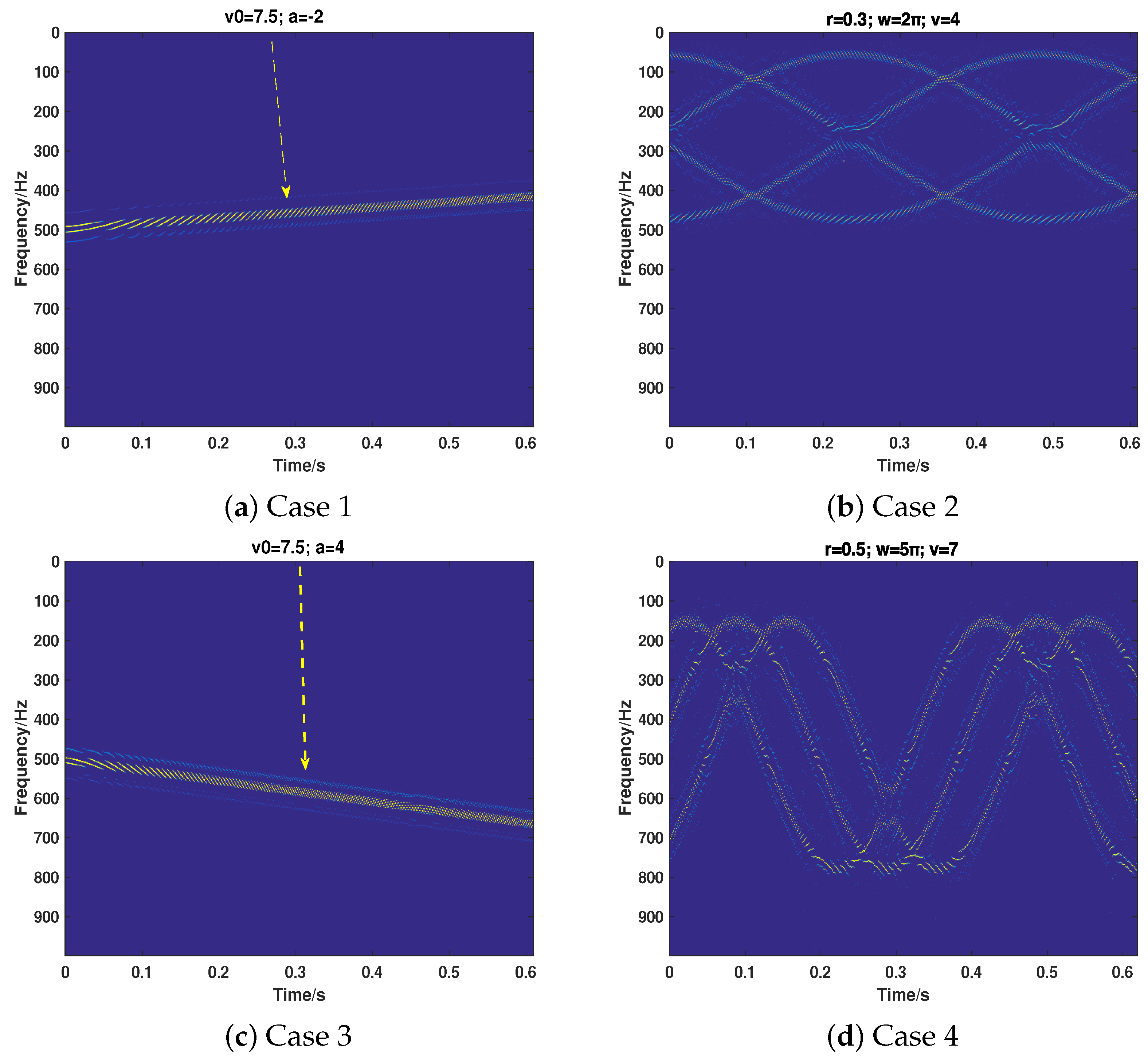
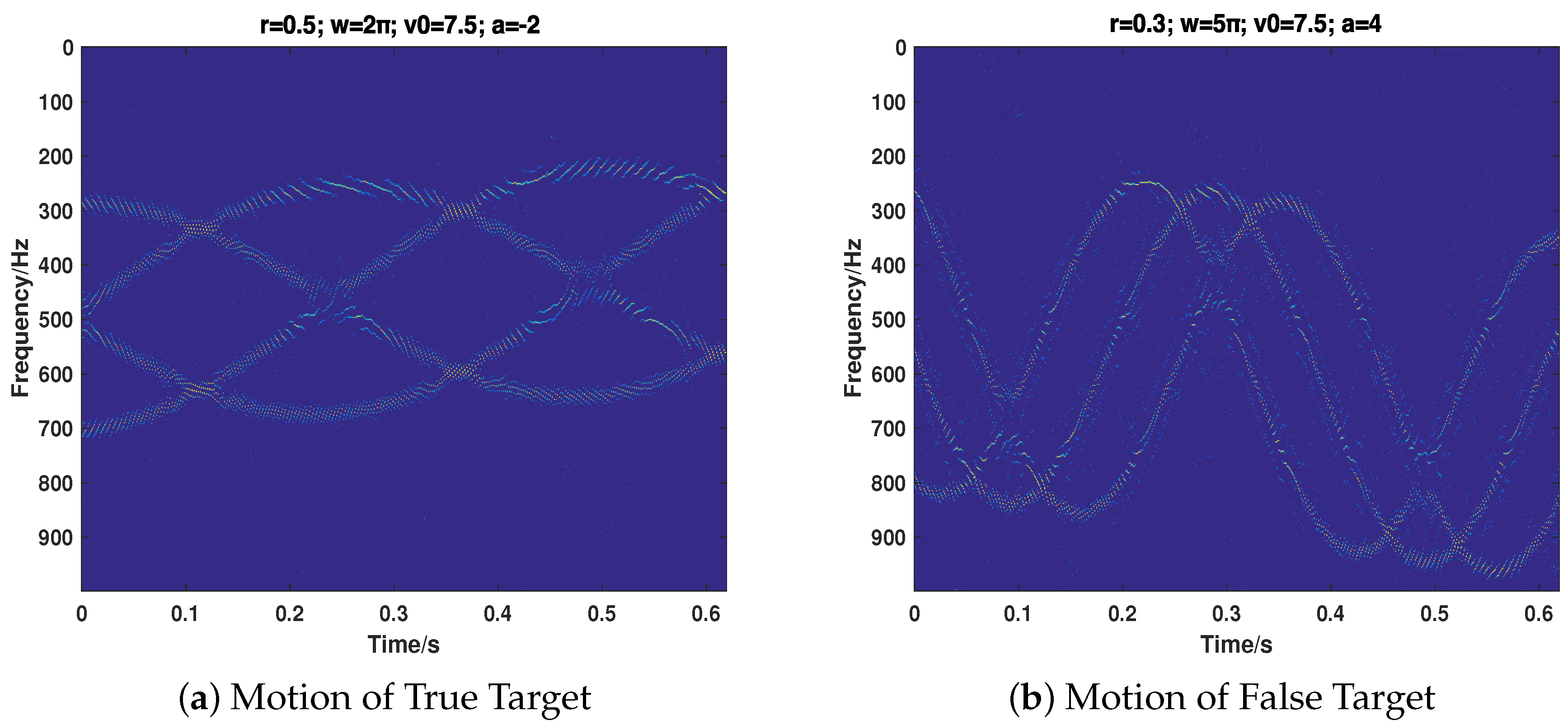
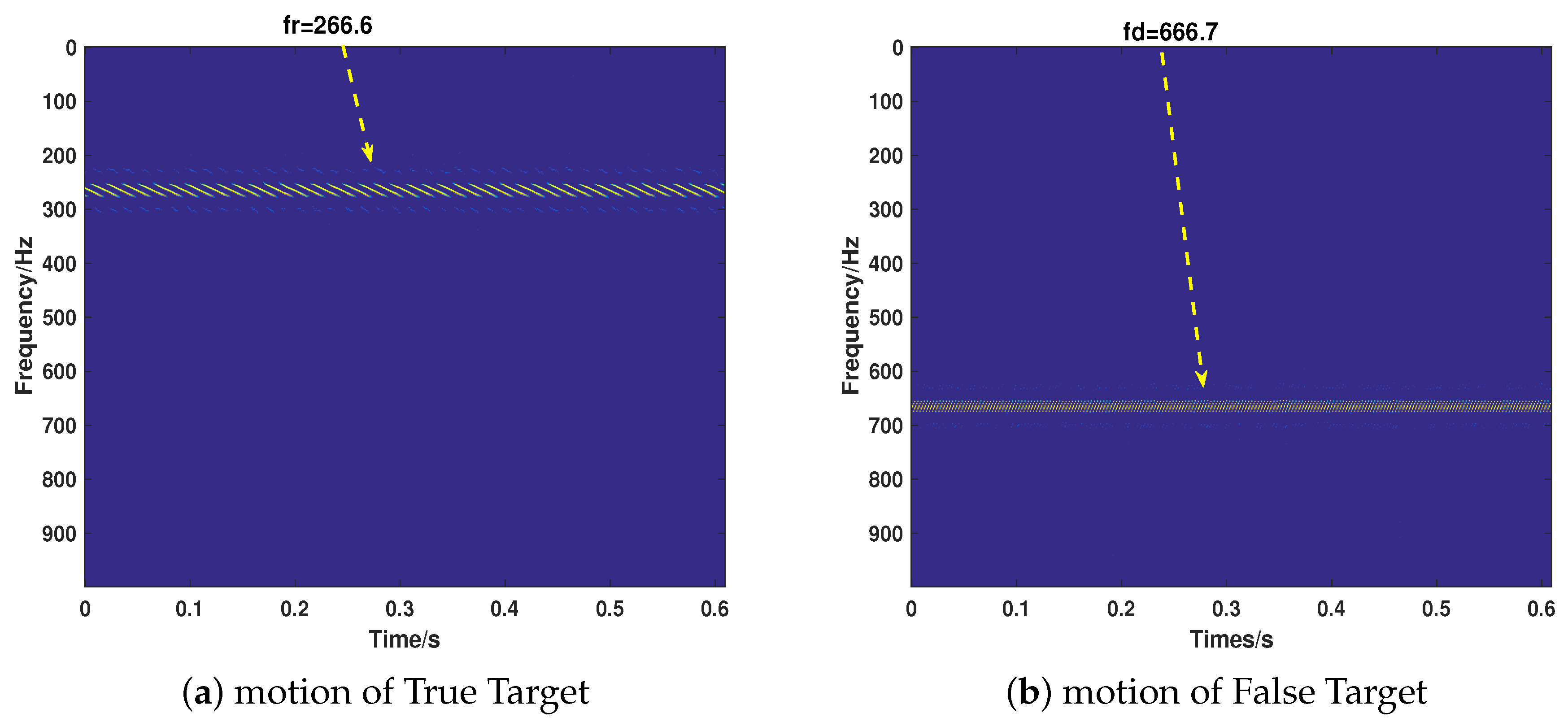
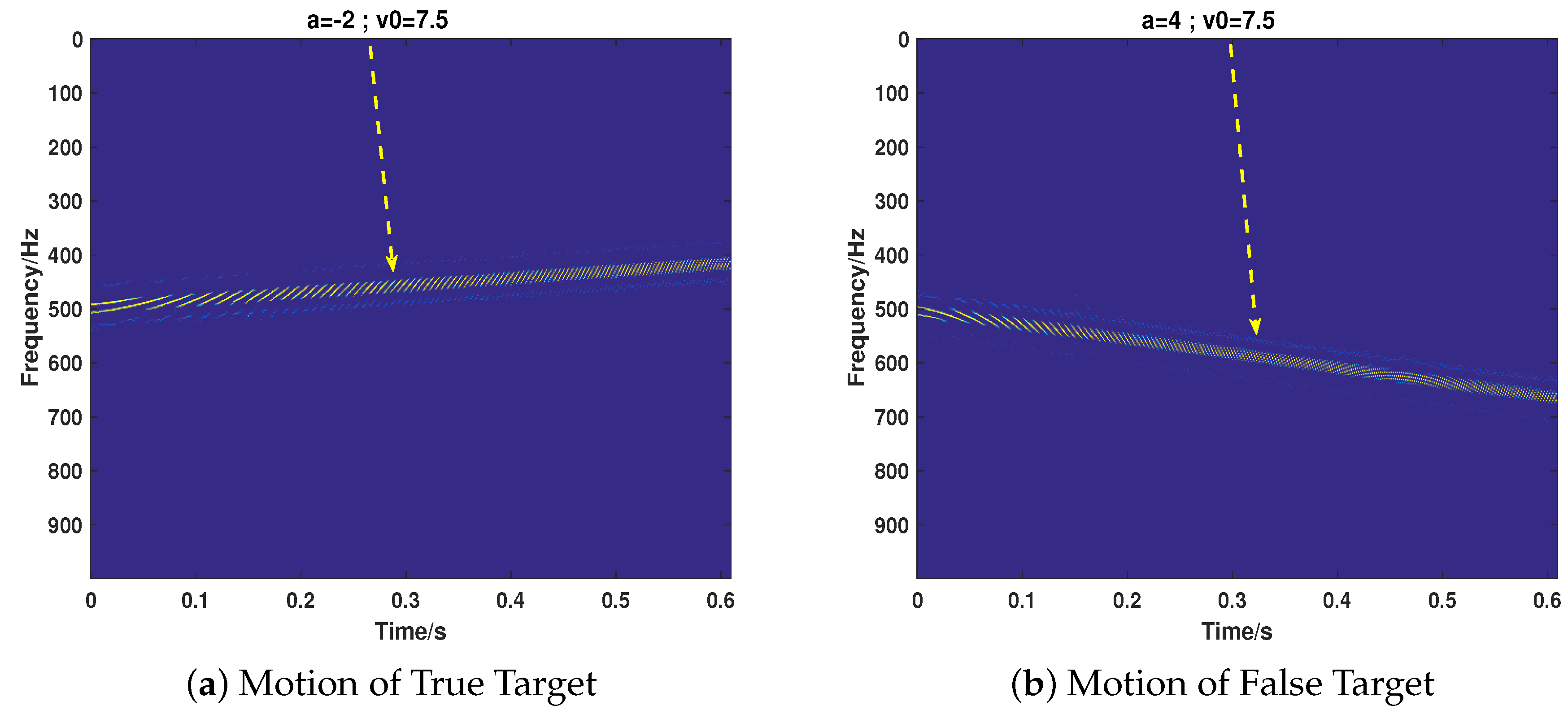
4.1. The Effectiveness of the Proposed Strategy
4.2. The Superiority of the Proposed Method
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Mahafza, B.R. Radar Systems Analysis and Design Using MATLAB, 3rd ed.; CRC Press: Boca Raton, FL, USA, 2013. [Google Scholar]
- Meikle, H. Modern Radar Systems; Artech House: Norwood, MA, USA, 2008. [Google Scholar]
- Zhang, J.; Zhu, D.; Zhang, G. New Antivelocity Deception Jamming Technique using Pulses with Adaptive Initial Phases. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 1290–1300. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, W.; Pan, X.; Dai, D.; Feng, D. A frequency-domain three-stage algorithm for active deception jamming against synthetic aperture radar. Sonar Navig. IET Radar 2014, 8, 639–646. [Google Scholar] [CrossRef]
- Zhao, B.; Zhou, F.; Bao, Z. Deception Jamming for Squint SAR Based on Multiple Receivers. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 3988–3998. [Google Scholar] [CrossRef]
- Chen, V.C. The Micro-Doppler Effect in Radar; Google-Books-ID: eJ7eMHpxt30C; Artech House: Norwood, MA, USA, 2011. [Google Scholar]
- Chen, V.C.; Li, F.; Ho, S.S.; Wechsler, H. Micro-Doppler effect in radar: Phenomenon, model, and simulation study. IEEE Trans. Aerosp. Electron. Syst. 2006, 42, 2–21. [Google Scholar] [CrossRef]
- Dudczyk, J. Radar emission sources identification based on hierarchical agglomerative clustering for large data sets. J. Sens. 2016, 2016. [Google Scholar] [CrossRef]
- Dudczyk, J. A method of feature selection in the aspect of specific identification of radar signals. Bull. Polish Acad. Sci. Tech. Sci. 2017, 65, 113–119. [Google Scholar] [CrossRef]
- Soumekh, M. SAR-ECCM using phase-perturbed LFM chirp signals and DRFM repeat jammer penalization. IEEE Trans. Aerosp. Electron. Syst. 2006, 42, 191–205. [Google Scholar] [CrossRef]
- Roome, S. Digital radio frequency memory. Electron. Commun. Eng. J. 1990, 2, 147–153. [Google Scholar] [CrossRef]
- Pace, P.; Fouts, D.; Ekestorm, S.; Karow, C. Digital false-target image synthesiser for countering ISAR. IEE Proc. Radar Sonar Navig. 2002, 149, 248–257. [Google Scholar] [CrossRef]
- Shi, X.R.; Zhou, F.; Zhao, B.; Tao, M.L.; Zhang, Z.J. Deception jamming method based on micro-Doppler effect for vehicle target. Sonar Navig. IET Radar 2016, 10, 1071–1079. [Google Scholar] [CrossRef]
- Zhu, B.Y.; Xue, L.; Bi, D.P. A novel method of ISAR jamming based on synthesizing equivalent micro-motion point. Mod. Radar 2011, 33, 33–36. [Google Scholar]
- Bo, Z.; Zhou, F.; Shi, X.; Wu, Q.; Zheng, B. Multiple targets deception jamming against ISAR using electromagnetic properties. IEEE Sens. J. 2015, 15, 2031–2038. [Google Scholar] [CrossRef]
- Liu, N.; Zhao, S.; Zhang, L. A radar ECCM scheme based on full-rate orthogonal pulse block. J. Comput. Inf. Syst. 2013, 9, 9771–9779. [Google Scholar]
- Akhtar, J. Orthogonal block coded ECCM schemes against repeat radar jammers. IEEE Trans. Aerosp. Electron. Syst. 2009, 45. [Google Scholar] [CrossRef]
- Huang, C.; Chen, Z.; Duan, R. Novel discrimination algorithm for deceptive jamming in polarimetric radar. In Proceedings of the 2012 International Conference on Information Technology and Software Engineering, Beijing, China, 8–10 December 2012; pp. 359–365. [Google Scholar]
- Greco, M.; Gini, F.; Farina, A. Combined effect of phase and RGPO delay quantization on jamming signal spectrum. In Proceedings of the 2005 IEEE International Radar Conference, Arlington, VA, USA, 9–12 May 2005; pp. 37–42. [Google Scholar]
- Greco, M.; Gini, F.; Farina, A. Radar detection and classification of jamming signals belonging to a cone class. IEEE Trans. Signal Process. 2008, 56, 1984–1993. [Google Scholar] [CrossRef]
- Nouri, M.; Mivehchy, M.; Sabahi, M.F. Novel Anti-Deception Jamming Method by Measuring Phase Noise of Oscillators in LFMCW Tracking Radar Sensor Networks. IEEE Access 2017, 5, 11455–11467. [Google Scholar] [CrossRef]
- Yang, Y.; Wu, J.; Cui, G.; Li, L.; Kong, L.; Huang, Y. Optimized phase-coded waveform design against velocity deception. In Proceedings of the 2015 IEEE Radar Conference (RadarCon), Arlington, VA, USA, 10–15 May 2015; pp. 0400–0404. [Google Scholar]
- Xiong, W.; Wang, X.; Zhang, G. Cognitive waveform design for anti-velocity deception jamming with adaptive initial phases. In Proceedings of the 2016 IEEE Radar Conference (RadarConf), Philadelphia, PA, USA, 2–6 May 2016; pp. 1–5. [Google Scholar]
- Soumekh, M. SAR-ECCM using phase-perturbed LFM chirp signals and DRFM repeat jammer penalization. In Proceedings of the 2005 IEEE International Radar Conference, Arlington, VA, USA, 9–12 May 2005; pp. 507–512. [Google Scholar]
- Townsend, J.D.; Saville, M.A.; Hongy, S.M.; Martin, R.K. Simulator for velocity gate pull-off electronic countermeasure techniques. In Proceedings of the RADAR’08 Radar Conference, Rome, Italy, 26–30 May 2008; pp. 1–6. [Google Scholar]
- Sui, J.; Liu, Z.; Wei, X.; Li, X.; Peng, B.; Liao, D. Velocity false target identification in random pulse initial phase radar based on compressed sensing. In Proceedings of the 2015 3rd International Workshop on Compressed Sensing Theory and Its Applications to Radar, Sonar and Remote Sensing (CoSeRa), Pisa, Italy, 17–19 June 2015; pp. 179–183. [Google Scholar]
- Sui, J.; Zhang, X.; Liu, Z.; Wei, X.; Li, X. Sparse-based false target identification in pulse-Doppler radar with random pulse initial phase. In Proceedings of the International Conference on Wireless Communications & Signal Processing (WCSP), Nanjing, China, 15–17 October 2015; pp. 1–5. [Google Scholar]
- Sui, J.; Liu, Z.; Li, X.; Wei, X.; Wang, S. Micro-motion false target identification in random pulse initial phase radar based on compressed sensing. In Proceedings of the 2017 Progress in Electromagnetics Research Symposium-Spring (PIERS), St. Petersburg, Russia, 22–25 May 2017; pp. 573–578. [Google Scholar]
- Liu, Z.; You, P.; Wei, X.; Liao, D.; Li, X. High Resolution Time-Frequency Distribution Based on Short-Time Sparse Representation. Circuits Syst. Signal Process. 2014, 33, 3949–3965. [Google Scholar] [CrossRef]
- Chen, V.C. Micro-Doppler effect of micromotion dynamics: A review. Independ. Comp. Anal. Wavel. Neural Netw. 2003, 5102, 240–250. [Google Scholar]
- CVX Research, I. CVX: Matlab Software for Disciplined Convex Programming, Version 2.0. Available online: http://cvxr.com/cvx (accessed on 16 April 2018).
- Grant, M.; Boyd, S. Graph implementations for nonsmooth convex programs. In Recent Advances in Learning and Control; Lecture Notes in Control and Information Sciences; Blondel, V., Boyd, S., Kimura, H., Eds.; Springer Limited: London, UK, 2008; pp. 95–110. Available online: http://stanford.edu/~boyd/graph_dcp.html (accessed on 16 April 2018).









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | True Motion | True Parameters | False Motion | False Parameters |
|---|---|---|---|---|
| Case 1 | UALM | m/s; a m/s | – | – |
| Case 2 | ULM with rotation | m; ; m/s | – | – |
| Case 3 | – | – | UALM | m/s |
| Case 4 | – | – | ULM with rotation | m; m/s |
| Case | True Motion | True Parameters | False Motion | False Parameters |
|---|---|---|---|---|
| Case 5 | ULM | m/s | ULM | m/s |
| Case 6 | UALM | m/s; m/s | UALM | m/s; m/s |
| Case 7 | ULM with rotation | m; m/s | ULM with rotation | m; |
| Case 8 | UALM with rotation | m; m/s; m/ | UALM with rotation | m; m/s; m/s |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Z.; Sui, J.; Wei, Z.; Li, X. A Sparse-Driven Anti-Velocity Deception Jamming Strategy Based on Pulse-Doppler Radar with Random Pulse Initial Phases. Sensors 2018, 18, 1249. https://doi.org/10.3390/s18041249
Liu Z, Sui J, Wei Z, Li X. A Sparse-Driven Anti-Velocity Deception Jamming Strategy Based on Pulse-Doppler Radar with Random Pulse Initial Phases. Sensors. 2018; 18(4):1249. https://doi.org/10.3390/s18041249
Chicago/Turabian StyleLiu, Zhen, Jinping Sui, Zhenhua Wei, and Xiang Li. 2018. "A Sparse-Driven Anti-Velocity Deception Jamming Strategy Based on Pulse-Doppler Radar with Random Pulse Initial Phases" Sensors 18, no. 4: 1249. https://doi.org/10.3390/s18041249
APA StyleLiu, Z., Sui, J., Wei, Z., & Li, X. (2018). A Sparse-Driven Anti-Velocity Deception Jamming Strategy Based on Pulse-Doppler Radar with Random Pulse Initial Phases. Sensors, 18(4), 1249. https://doi.org/10.3390/s18041249