The Height-Adaptive Parameterized Step Length Measurement Method and Experiment Based on Motion Parameters


Abstract
:1. Introduction
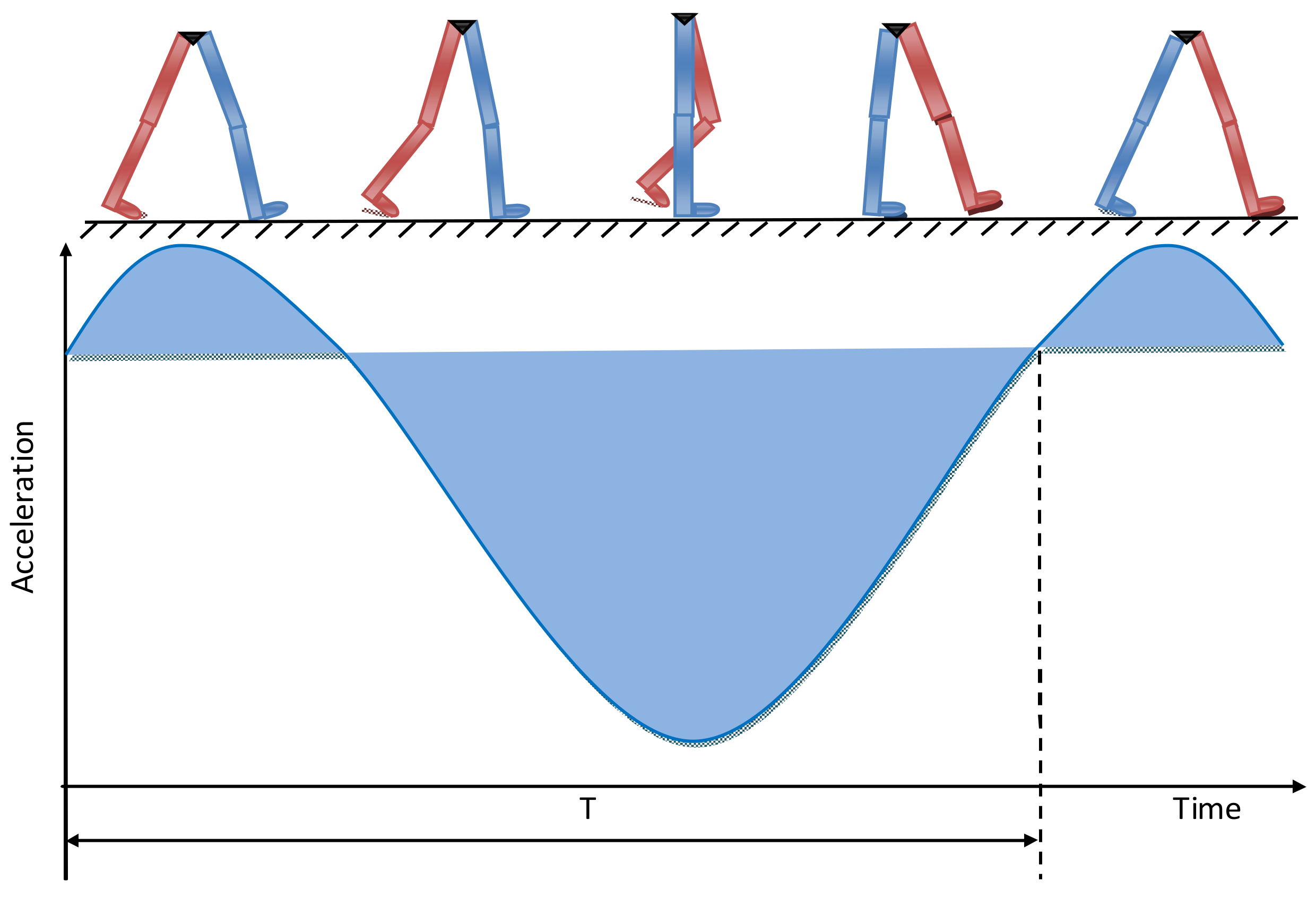
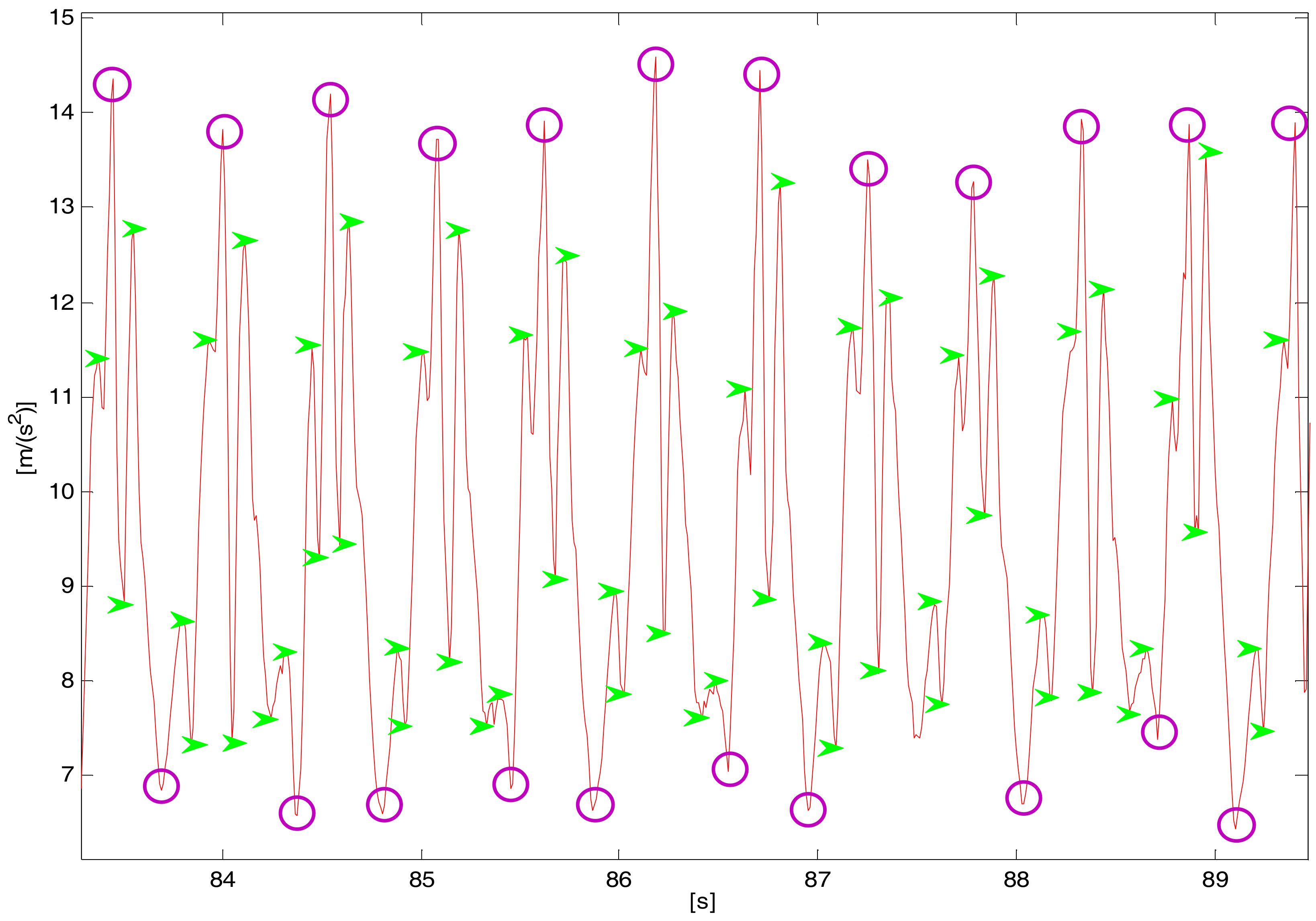
2. Analysis of Gait Characteristics
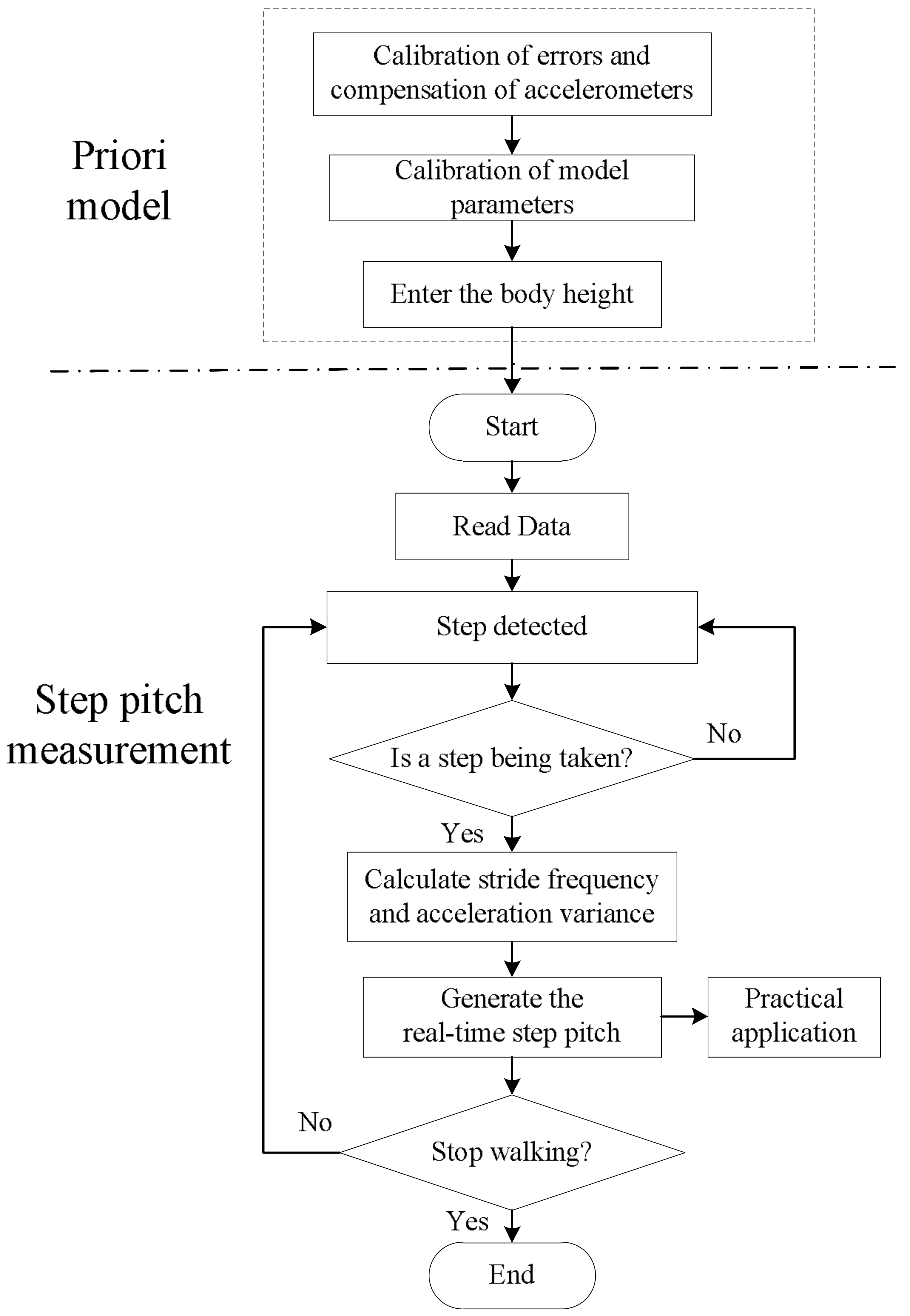
3. Step Length Measurement Method
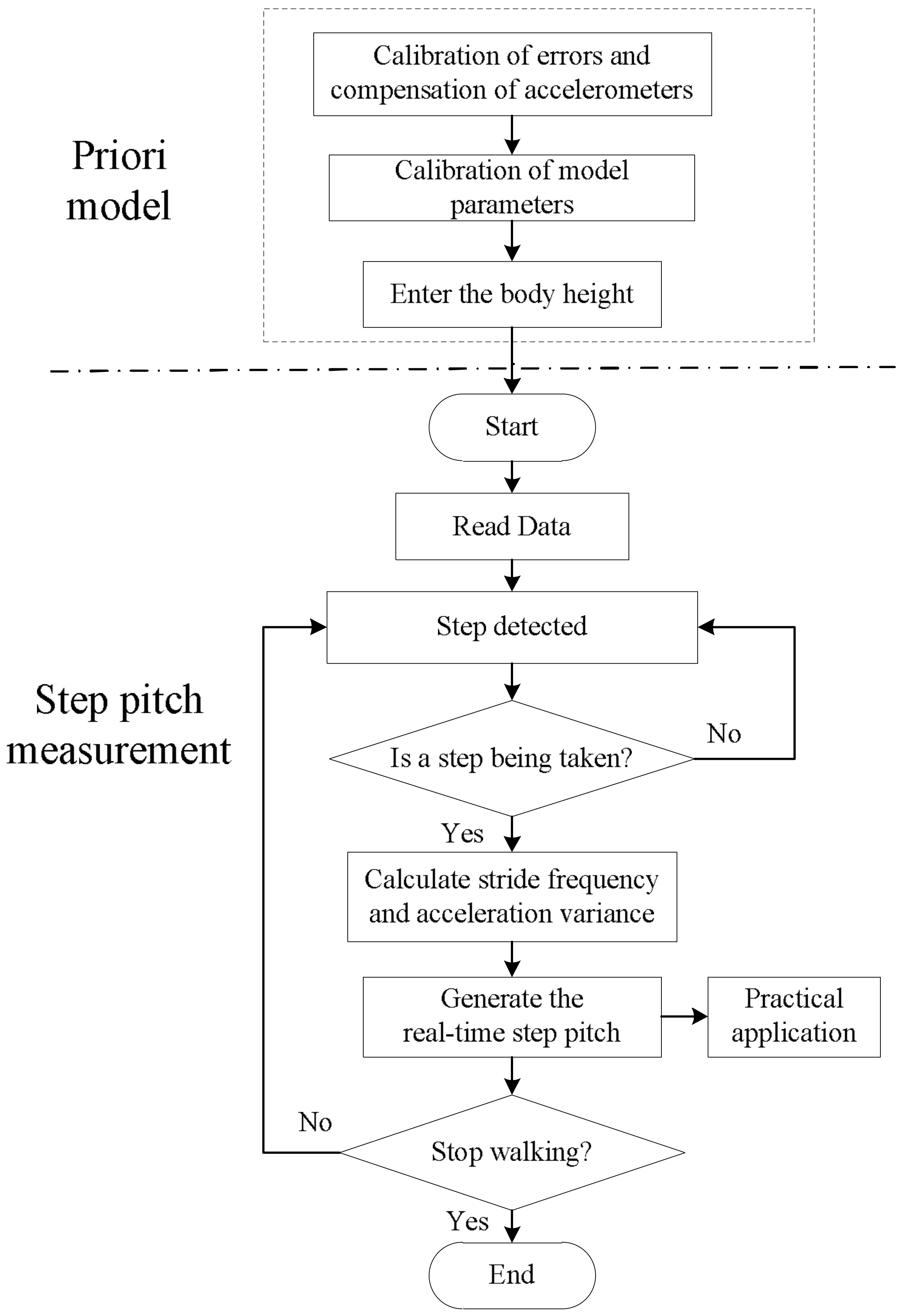
3.1. The Step Length Measurement Method Based on Stride Frequency and Acceleration Variance
3.2. The Step Length Measurement Method Based on Height, Stride Frequency and Acceleration Variance
4. Experiment Research and Analysis
- (1)
- The model parameter calibration of the height-adaptive and parameterized step length model;
- (2)
- An evaluation of the accuracy of the step length measurement based on a walking experiment.
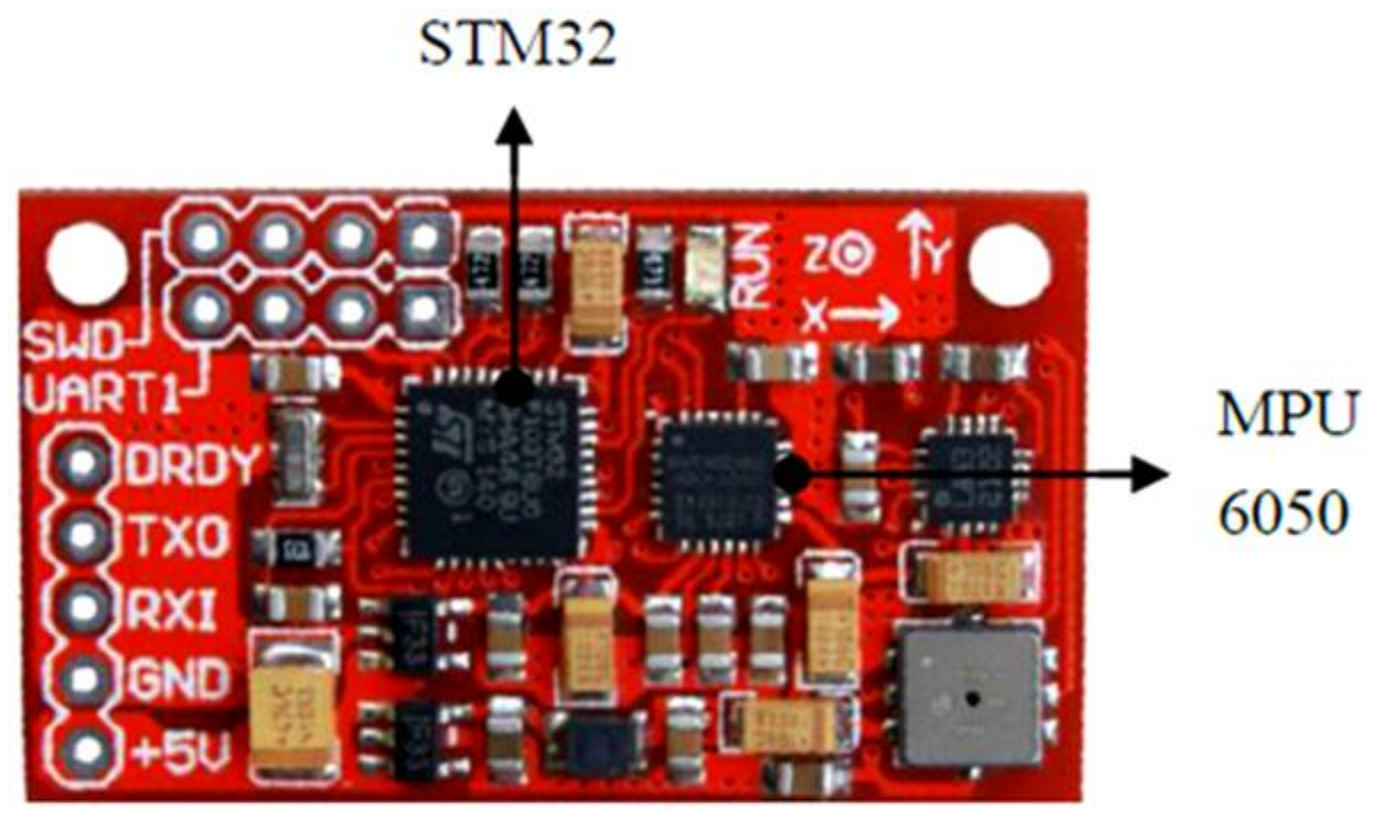
4.1. Experimental Equipment
4.2. Calibration of Experiment Parameters for the Step Length Model
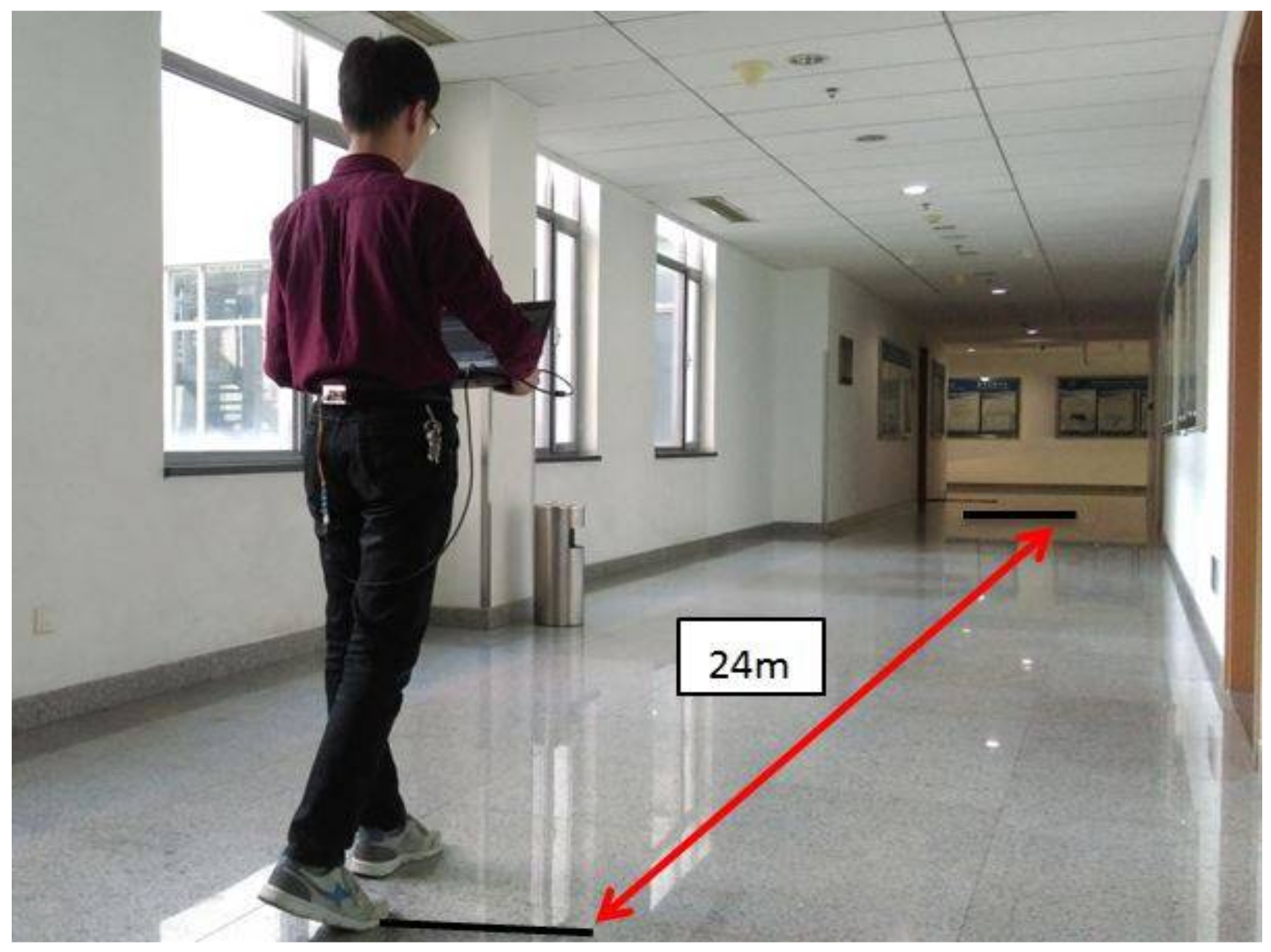
4.3. Walking Experiments
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Durie, N.D.; Farley, R.L. An apparatus for step length measurement. J. Biomed. Eng. 1980, 2, 38–40. [Google Scholar] [CrossRef]
- Shin, S.H.; Chan, G.P. Adaptive step length estimation algorithm using optimal parameters and movement status awareness. Med. Eng. Phys. 2011, 33, 1064–1071. [Google Scholar] [CrossRef] [PubMed]
- Sayeed, T.; Samã, A.; Catalã, A.; Rodríguez-Molinero, A.; Cabestany, J. Adapted step length estimators for patients with Parkinson’s disease using a lateral belt worn accelerometer. Technol. Health Care Off. J. Eur. Soc. Eng. Med. 2015, 23, 179–194. [Google Scholar]
- Juen, J.; Cheng, Q.; Schatz, B. A natural walking monitor for pulmonary patients using mobile phones. IEEE J. Biomed. Health Inform. 2015, 19, 1399–1405. [Google Scholar] [CrossRef] [PubMed]
- Zhuang, Y.; Lan, H.; Li, Y.; El-Sheimy, N. PDR/INS/WiFi integration based on handheld devices for indoor pedestrian navigation. Micromachines 2015, 6, 793–812. [Google Scholar] [CrossRef]
- Renaudin, V.; Combettes, C. Magnetic, Acceleration Fields and Gyroscope Quaternion (MAGYQ)-Based Attitude Estimation with Smartphone Sensors for Indoor Pedestrian Navigation. Sensors 2014, 14, 22864–22890. [Google Scholar] [CrossRef] [PubMed]
- Müller, P.; Seel, T.; Schauer, T. Experimental Evaluation of a Novel Inertial Sensor Based Realtime Gait Phase Detection Algorithm. In Proceedings of the European Conference on Technically Assisted Rehabilitation—TAR 2015, Berlin, Germany, 12–13 March 2015. [Google Scholar]
- Gao, Y.; Jiang, Z.; Ni, W.; Vasic, Z.L.; Cifrek, M.; Du, M.; Vai, M.I.; Pun, S.H. A Novel Gait Detection Algorithm Based on Wireless Inertial Sensors. In CMBEBIH 2017; Springer: Singapore, 2017; pp. 300–304. [Google Scholar]
- Seel, T.; Graurock, D.; Schauer, T. Realtime assessment of foot orientation by accelerometers and gyroscopes. Curr. Dir. Biomed. Eng. 2015, 1, 466–469. [Google Scholar] [CrossRef]
- Brahms, C.M.; Zhao, Y.; Gerhard, D.; Barden, J.M. Stride length determination during overground running using a single foot-mounted inertial measurement unit. J. Biomech. 2018. [Google Scholar] [CrossRef] [PubMed]
- Cavagna, G.A.; Thys, H.; Zamboni, A. The sources of external work in level walking and running. J. Physiol. (Lond.) 1976, 262, 639–657. [Google Scholar] [CrossRef]
- Zijlstra, W.; Hof, A. Assessment of spatio-temporal gait parameters from trunk accelerations during human walking. Gait Posture 2003, 18, 1–10. [Google Scholar] [CrossRef]
- Brandes, M.; Zijlstra, W.; Heikens, S.; van Lummel, R.; Rosenbaum, D. Accelerometry based assessment of gait parameters in children. Gait Posture 2006, 24, 482–486. [Google Scholar] [CrossRef] [PubMed]
- González, R.C.; Alvarez, D.; López, A.M.; Alvarez, J.C. Modified pendulum model for mean step length estimation. In Proceedings of the International Conference of the IEEE Engineering in Medicine and Biology Society (EMBS 2007), Lyon, France, 22–26 August 2007; pp. 1371–1374. [Google Scholar]
- Lan, K.C.; Shih, W.Y. Using smart-phones and floor plans for indoor location tracking. IEEE Trans. Hum. Mach. Syst. 2014, 44, 211–221. [Google Scholar]
- Weinberg, H. Using the ADXL202 in Pedometer and Personal Navigation Applications. Analog Devices AN-602 Application Note. Available online: http://www.docin.com/p-1743985325.html (accessed on 23 March 2018).
- Ho, N.H.; Truong, P.H.; Jeong, G.M. Step-Detection and Adaptive Step-Length Estimation for Pedestrian Dead-Reckoning at Various Walking Speeds Using a Smartphone. Sensors 2016, 16, 1423. [Google Scholar] [CrossRef] [PubMed]
- Zhu, Y.; Zhang, R.; Xia, W.; Jia, Z.; Shen, L. A hybrid step model and new azimuth estimation method for pedestrian dead reckoning. In Proceedings of the Sixth International Conference on Wireless Communications and Signal Processing, Hefei, China, 23–25 October 2014; pp. 1–5. [Google Scholar]
- Levi, R.W.; Judd, T. Dead Reckoning Navigational System Using Accelerometer to Measure Foot Impacts. U.S. Patent US5,583,776, 10 December 1996. [Google Scholar]
- Ladetto, Q. On Foot Navigation: Continuous Step Calibration Using Both Complementary Recursive Prediction and Adaptive Kalman Filtering. In Proceedings of the ION GPS, Salt Lake City, UT, USA, 19–22 September 2000; pp. 1735–1740. [Google Scholar]
- Qian, J.; Pei, L.; Zou, D.; Qian, K.; Liu, P. Optical flow based step length estimation for indoor pedestrian navigation on a smartphone. In Proceedings of the Position, Location and Navigation Symposium (PLANS 2014), Monterey, CA, USA, 5–8 May 2014; pp. 205–211. [Google Scholar]
- Renaudin, V.; Susi, M.; Lachapelle, G. Step length estimation using handheld inertial sensors. Sensors 2012, 12, 8507–8525. [Google Scholar] [CrossRef] [PubMed]
- Shibuya, N.; Nukala, B.T.; Rodriguez, A.I.; Tsay, J.; Nguyen, T.Q.; Zupancic, S.; Lie, D.Y. A real-time fall detection system using a wearable gait analysis sensor and a Support Vector Machine (SVM) classifier. In Proceedings of the Eighth International Conference on Mobile Computing and Ubiquitous Networking, Hakodate, Japan, 20–22 January 2015; pp. 66–67. [Google Scholar]
- Kauw-A-Tjoe, R.; Thalen, J.; Marin-Perianu, M.; Havinga, P. SensorShoe: Mobile Gait Analysis for Parkinson’s Disease Patients. In Proceedings of the UbiComp 2007 Workshops, University of Innsbruck, Innsbruck, Austria, 16–19 September 2017. [Google Scholar]
- Zhang, Y.; Xiong, Y.; Wang, Y.; Li, C.; Wang, Z. An Adaptive Dual-Window Step Detection Method for a Waist-Worn Inertial Navigation System. J. Navig. 2016, 69, 659–672. [Google Scholar] [CrossRef]
- Zhang, Y.; Xu, Y.; Xing, X.; Wang, Z.; Xiong, Y. The Standing Calibration Method of MEMS Gyro Bias for Autonomous Pedestrian Navigation System. J. Navig. 2016, 70, 607–617. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Groups | Height (m) | Stride Frequency m (Hz) | Acceleration Variance | Step Length (m) |
|---|---|---|---|---|
| 1 | 1.60 | 1.6418 | 0.1662 | 0.5455 |
| 2 | 1.60 | 1.5842 | 0.1253 | 0.5217 |
| 3 | 1.60 | 1.8242 | 0.4685 | 0.6154 |
| 4 | 1.60 | 1.8470 | 0.3424 | 0.6000 |
| 5 | 1.60 | 1.8377 | 0.5645 | 0.6316 |
| 6 | 1.60 | 1.9035 | 0.8991 | 0.6857 |
| 7 | 1.63 | 1.5820 | 0.2578 | 0.6154 |
| 8 | 1.63 | 1.5016 | 0.2138 | 0.6000 |
| 9 | 1.63 | 1.7242 | 0.6021 | 0.7102 |
| 10 | 1.63 | 1.7566 | 0.5718 | 0.7059 |
| 11 | 1.63 | 1.8346 | 1.2402 | 0.8000 |
| 12 | 1.63 | 1.8831 | 1.1853 | 0.8000 |
| 13 | 1.71 | 1.7640 | 0.5182 | 0.6667 |
| 14 | 1.71 | 1.7624 | 0.3912 | 0.6667 |
| 15 | 1.71 | 1.8278 | 0.9619 | 0.7273 |
| 16 | 1.71 | 1.8471 | 0.8618 | 0.7273 |
| 17 | 1.71 | 1.9942 | 1.4286 | 0.8000 |
| 18 | 1.71 | 2.0901 | 1.8048 | 0.8276 |
| 19 | 1.78 | 1.4914 | 0.2503 | 0.6667 |
| 20 | 1.78 | 1.6307 | 0.3343 | 0.7059 |
| 21 | 1.78 | 1.7328 | 0.5587 | 0.7500 |
| 22 | 1.78 | 1.7476 | 0.5065 | 0.7500 |
| 23 | 1.78 | 1.9508 | 1.2965 | 0.8889 |
| 24 | 1.78 | 1.9738 | 1.2014 | 0.8571 |
| 25 | 1.83 | 1.4564 | 0.2006 | 0.6486 |
| 26 | 1.83 | 1.6707 | 0.2367 | 0.6857 |
| 27 | 1.83 | 1.7334 | 0.4753 | 0.7500 |
| 28 | 1.83 | 1.7614 | 0.5075 | 0.7500 |
| 29 | 1.83 | 2.0869 | 1.2029 | 1.0000 |
| 30 | 1.83 | 2.0604 | 1.2742 | 0.9600 |
| Groups | Height | Step Number | Mean step Length (m) | Actual Path Length (m) | Walking Distance (m) | Error Rate (%) | Average Error (%) | Standard Deviation | |
|---|---|---|---|---|---|---|---|---|---|
| The method based on f and | 1 | 155 | 638 | 0.7408 | 400 | 472.6304 | 18.16 | 7.904 | 5.8297 |
| 2 | 158 | 820 | 0.6933 | 453 | 568.4709 | 25.49 | |||
| 3 | 160 | 636 | 0.7699 | 453 | 489.6721 | 8.09 | |||
| 4 | 161 | 634 | 0.7868 | 453 | 498.8594 | 10.12 | |||
| 5 | 162 | 616 | 0.7058 | 400 | 434.7728 | 8.69 | |||
| 6 | 163 | 659 | 0.6811 | 400 | 448.8564 | 12.21 | |||
| 7 | 164 | 501 | 0.7119 | 400 | 356.6674 | 10.83 | |||
| 8 | 165 | 578 | 0.7027 | 400 | 406.1556 | 1.53 | |||
| 9 | 166 | 607 | 0.6845 | 400 | 415.5034 | 3.87 | |||
| 10 | 167 | 615 | 0.6894 | 400 | 423.9888 | 5.99 | |||
| 11 | 168 | 572 | 0.6736 | 400 | 385.2728 | 3.68 | |||
| 12 | 170 | 636 | 0.6922 | 453 | 440.2300 | 2.82 | |||
| 13 | 171 | 513 | 0.7317 | 400 | 375.3375 | 6.17 | |||
| 14 | 172 | 532 | 0.7284 | 400 | 387.5195 | 3.12 | |||
| 15 | 173 | 482 | 0.7451 | 400 | 359.1375 | 10.21 | |||
| 16 | 175 | 567 | 0.6879 | 400 | 390.0232 | 2.49 | |||
| 17 | 177 | 475 | 0.7956 | 400 | 377.9307 | 5.52 | |||
| 18 | 180 | 549 | 0.7477 | 400 | 410.4711 | 2.62 | |||
| 19 | 181 | 540 | 0.6722 | 400 | 366.7747 | 8.31 | |||
| 20 | 184 | 618 | 0.6732 | 453 | 416.0329 | 8.16 | |||
| The proposed method | 1 | 155 | 638 | 0.6385 | 400 | 407.5732 | 1.89 | 2.2215 | 1.3088 |
| 2 | 158 | 820 | 0.5649 | 453 | 463.2410 | 2.26 | |||
| 3 | 160 | 636 | 0.6866 | 453 | 436.7043 | 3.59 | |||
| 4 | 161 | 634 | 0.7404 | 453 | 469.4238 | 3.63 | |||
| 5 | 162 | 616 | 0.6455 | 400 | 397.6452 | 0.59 | |||
| 6 | 163 | 659 | 0.6175 | 400 | 406.9507 | 1.74 | |||
| 7 | 164 | 501 | 0.7762 | 400 | 388.8873 | 2.78 | |||
| 8 | 165 | 578 | 0.6790 | 400 | 392.4701 | 1.88 | |||
| 9 | 166 | 607 | 0.6540 | 400 | 397.0079 | 0.75 | |||
| 10 | 167 | 615 | 0.6714 | 400 | 412.9192 | 3.23 | |||
| 11 | 168 | 572 | 0.6581 | 400 | 376.4516 | 5.88 | |||
| 12 | 170 | 636 | 0.6154 | 400 | 395.0054 | 1.25 | |||
| 13 | 171 | 513 | 0.7640 | 400 | 391.9444 | 2.01 | |||
| 14 | 172 | 532 | 0.7577 | 400 | 403.0730 | 0.77 | |||
| 15 | 173 | 482 | 0.7989 | 400 | 385.0925 | 3.73 | |||
| 16 | 175 | 567 | 0.6949 | 400 | 394.0304 | 1.49 | |||
| 17 | 177 | 475 | 0.8211 | 400 | 390.0489 | 2.49 | |||
| 18 | 180 | 549 | 0.8358 | 453 | 458.8721 | 1.3 | |||
| 19 | 181 | 540 | 0.7236 | 400 | 390.7405 | 2.31 | |||
| 20 | 184 | 618 | 0.7267 | 453 | 449.0835 | 0.86 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Li, Y.; Peng, C.; Mou, D.; Li, M.; Wang, W. The Height-Adaptive Parameterized Step Length Measurement Method and Experiment Based on Motion Parameters. Sensors 2018, 18, 1039. https://doi.org/10.3390/s18041039
Zhang Y, Li Y, Peng C, Mou D, Li M, Wang W. The Height-Adaptive Parameterized Step Length Measurement Method and Experiment Based on Motion Parameters. Sensors. 2018; 18(4):1039. https://doi.org/10.3390/s18041039
Chicago/Turabian StyleZhang, Yanshun, Yingyue Li, Chuang Peng, Dong Mou, Ming Li, and Wei Wang. 2018. "The Height-Adaptive Parameterized Step Length Measurement Method and Experiment Based on Motion Parameters" Sensors 18, no. 4: 1039. https://doi.org/10.3390/s18041039
APA StyleZhang, Y., Li, Y., Peng, C., Mou, D., Li, M., & Wang, W. (2018). The Height-Adaptive Parameterized Step Length Measurement Method and Experiment Based on Motion Parameters. Sensors, 18(4), 1039. https://doi.org/10.3390/s18041039