1. Introduction
Light-Emitting Diode (LED) communication is an attractive and low-cost solution for free space communication systems [
1] and transmission in polymer optical fibers (POF) [
2]. Recently, due to the growing market share of LEDs in lighting applications, they have attracted increased attention in the context of visible light communications (VLC). The idea of VLC is to use lighting LEDs both for illumination and for distribution of high-speed data signal. VLC is now considered a technology complementary to 5G mobile systems, as it can provide additional high-capacity communications in the so-called optical attocells, where the receiver is directly illuminated by the white light source [
3]. There are two types of LEDs used for lighting applications. The first is a blue chip covered with a phosphorous layer, serving as a blue to yellow color converter. Both colors combined form light perceived as white. Unfortunately, the phosphorous layer has a slower time response and typically limits the bandwidth of LED to a few MHz. This can be managed with receiver blue filtering [
4] or digital equalization. Unfortunately, both solutions impose either power or noise enhancement penalties [
5,
6]. This problem is avoided in the second kind of lighting LED, which consists of three or more chips of different colors (e.g., RGB). In addition, as different chips can be modulated independently, wavelength division multiplexing can be used, which increases the data rate by a factor of channel number.
Regardless the LED type, LEDs are nonlinear devices, i.e., the emitted optical signal power a nonlinear function of the modulating current. This nonlinearity can have both static and dynamic characteristics. The former is mainly caused by efficiency drop, i.e., decreased internal quantum efficacy with increasing injection currents [
7]. The latter is caused by difference in carrier lifetimes, depending on the modulating current [
8]. Unfortunately, unlike inter-symbol interference (ISI), nonlinearity cannot be overcome by well-established methods of linear equalization and may become the major transmission rate limiting factor, especially for spectrally efficient advanced modulation formats, which require a high signal-to-noise ratio (SNR) at the receiver. Accurate description of LED nonlinearity is a vital issue, as it is necessary to estimate the information capacity of the link, and it can help evaluate the performance of different modulations. While the nature of nonlinearity has already been described in carrier rate equations [
8], this simple description does not accurately model the dynamics of the device [
9]. Therefore, description of LED nonlinearity as a black-box system could have a greater significance for LED transmission system modeling than theoretical models based on carrier transport [
9]. In our approach, LED input/output relation is represented with Volterra series, which is a general description of nonlinear systems behavior. The Volterra model has already been used for LED nonlinearity identification [
9,
10,
11] and has also successfully been applied to LED nonlinearity compensation for single-carrier [
12] and multicarrier modulation formats [
13].
2. Theory
To properly describe LEDs with the Volterra series, the series coefficients need to be measured first. Here, two methods can be applied: the frequency domain and the time domain methods. In the frequency domain method, the device is probed with a current waveform
and the amplitudes of harmonics generated at frequencies of
are measured, which can be related to the
n-th order Volterra kernel
. In this method,
n tones are needed to estimate the kernel up to the
n-th order. This approach has been applied to estimate the Volterra kernel of LEDs up to the 2nd [
9,
10] and 3rd [
11] order. The frequency domain method has some limitations, though. Firstly, only the magnitude response of the kernel can be measured. Secondly, it cannot measure the response at the kernel diagonals, e.g.,
, as the intermodulation product of this component falls at dc. Thirdly, for some frequencies of the probing harmonics, intermodulation products of the 2nd and higher orders fall at the same frequencies. For example, if two tones at frequencies
f1, 2
f1 are used, the 2nd order intermodulation products fall at
f1 and 3
f1, and the third order at 3
f1, 4
f1, 6
f1. It is readily visible that the tone at
f1 is disturbed by the presence of the probing signal, while the tone at 3
f1 is interfered with by the presence of the 3rd order distortion. To avoid this, the kernels need to be separated by linear regression. In this method, the probing is done with tones at various amplitudes and the dependence of the amplitudes of the intermodulation products of different orders on the amplitude of probing signal is exploited as an additional degree of freedom in separating the kernels [
12]. Unfortunately, this procedure highly complicates the measurement.
The time domain method is based on the relation between the input training signal
x(
t) and the output signal
y(
t) as described with time Volterra series [
12]
where
is the Volterra kernel of
m-th order in the time domain at
τm time delay,
n(
t) is additive noise signal,
M is the number of kernel orders and
We assume the probing signal to be a
M-ary filtered pulse amplitude modulation (PAM) waveform at baud rate
r and symbol interval
Ts = 1/
r. The time delays in (2) are then quantized at discrete multiples of
Ts and the equation can be transformed into a discrete form
where
Mm is the memory length of the
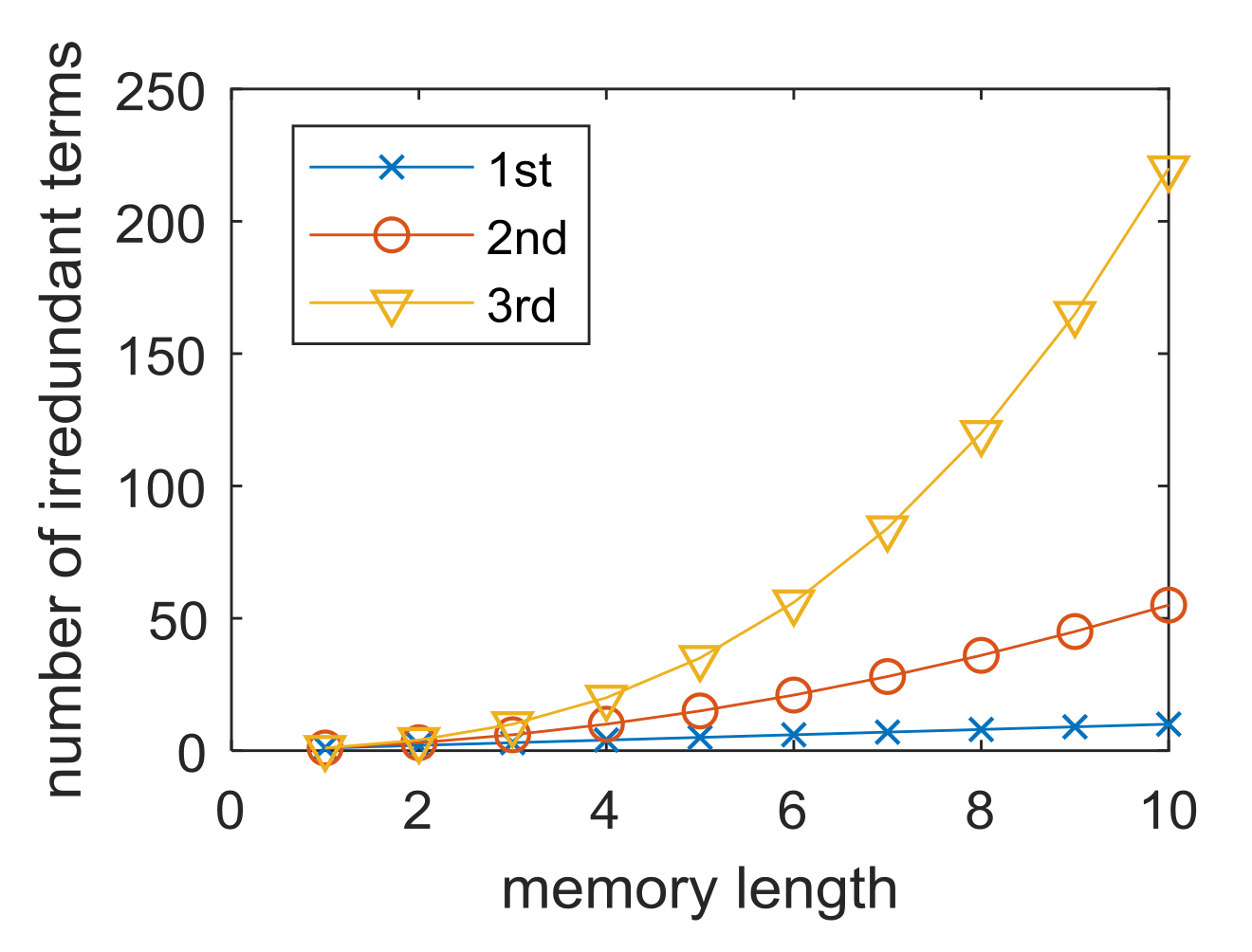
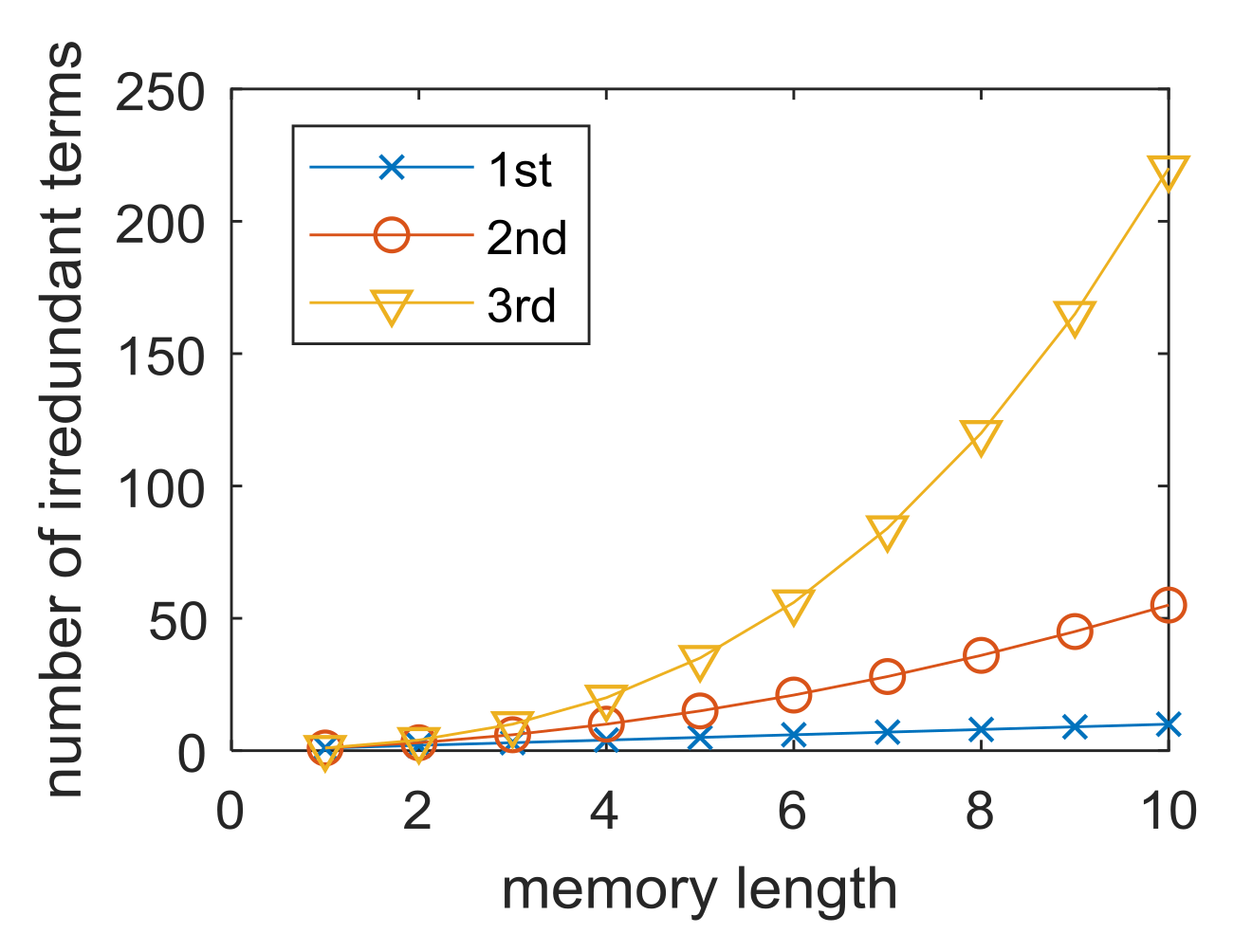
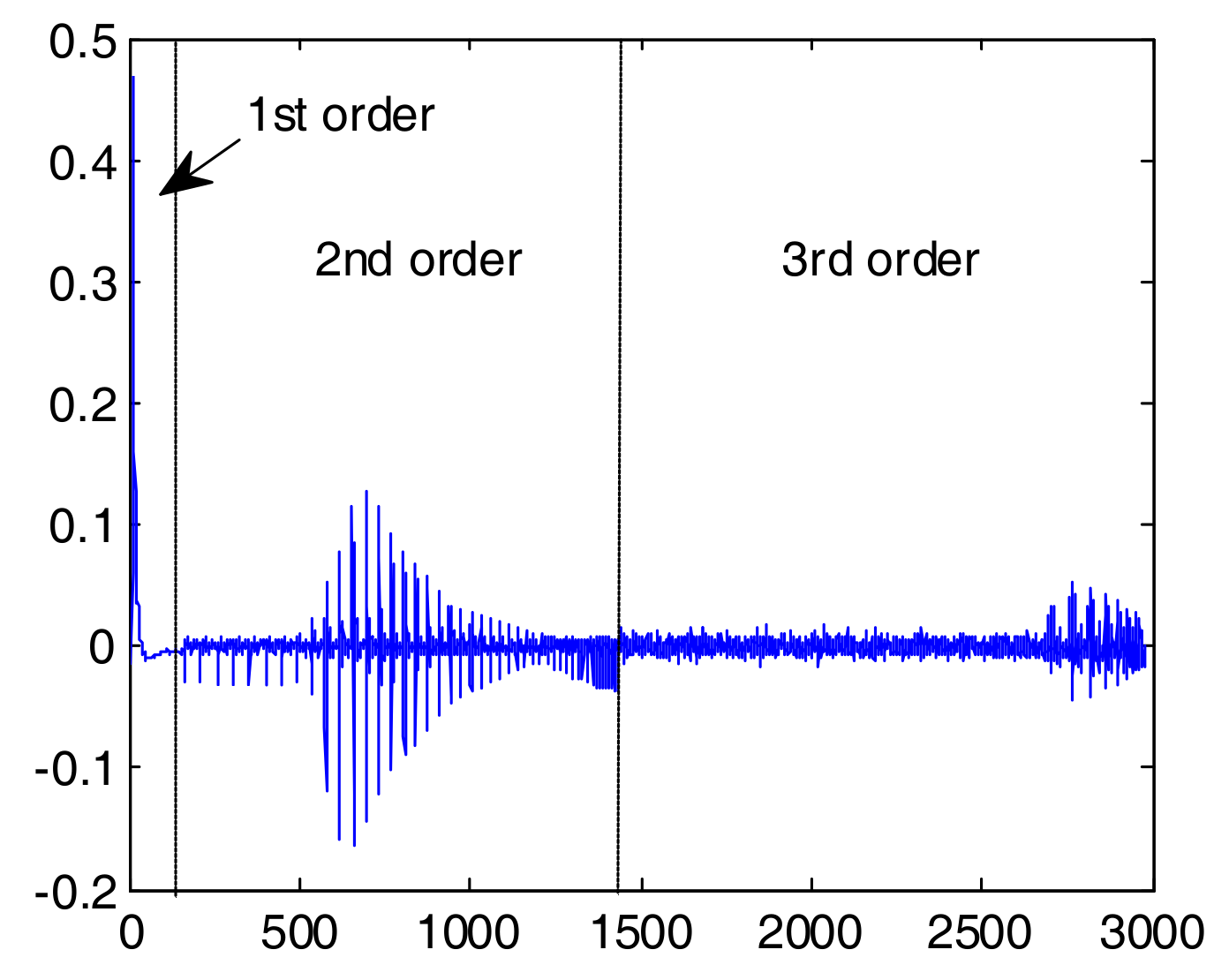
m-th order. As a prerequisite of the estimation, the maximum kernel order has to be assumed. It is a tradeoff between the estimation accuracy and complexity, as the number of series terms is given roughly as the memory length of the kernel to the power of the kernel order. However, the symmetry of the kernel coefficients can be exploited to reduce the number of terms that need to be estimated. For example, from (3), it is readily visible that
. The total number of irredundant terms is
in the 1st, 2nd, and 3rd order, respectively [
14]. After some rearrangements, (3) can be expressed in a matrix formalism
where
Y(
n) = [
y(
n),
y(
n − 1)...,
y(
n −
L)]
T,
N(
n) = [
n(
n),
n(
n − 1)...,
n(
n −
L)]
T and
is a vector containing the Volterra coefficients, and
is the training sequence matrix, with the following combinations of the training symbols
x(
n):
where
L is the length of the training sequence. The coefficients
H can be sought using least squares (LS) solution [
15]
It is noted that by doubling the training sequence length the variance of estimated coefficients is reduced by half. As an alternative to the LS method, recursive least squares (RLS) or least mean squares (LMS) adaptive algorithms may be applied to find
H [
16], which could help to avoid desynchronization if the transmitter and receiver are using different clocks.
We can now briefly comment on the numerical complexity of the estimation. The number of irredundant terms for each order has been plotted in
Figure 1 for varying values of the memory parameter. Clearly, the numerical complexity grows rapidly with the inclusion of higher-order nonlinearity. In addition, computation of each of the elements of
X matrix requires (
O-1) multiplications, where
O is the order number. Finally, the LS problem (7) is most efficiently solved by means of QR decomposition of matrix
X, which requires approximately
flops [
17].
The time domain coefficients can be transformed into the frequency domain using the Fourier transform [
14]
The time domain method has certain advantages over the frequency domain. As it yields complex valued coefficients, it allows for the prediction of the signal at the output of the model for known input signals. It does not require estimation at different modulating current values to separate the overlapping products of different kernels. Finally, the measurement procedure is instant in a setup with a PAM signal generator and digital storage oscilloscope (DSO). In the same manner as in the frequency domain method, the nonlinear distortions coming from higher-order terms, not included in the estimation, bias the estimated coefficients.
3. Experimental Setup and Measurement Procedure
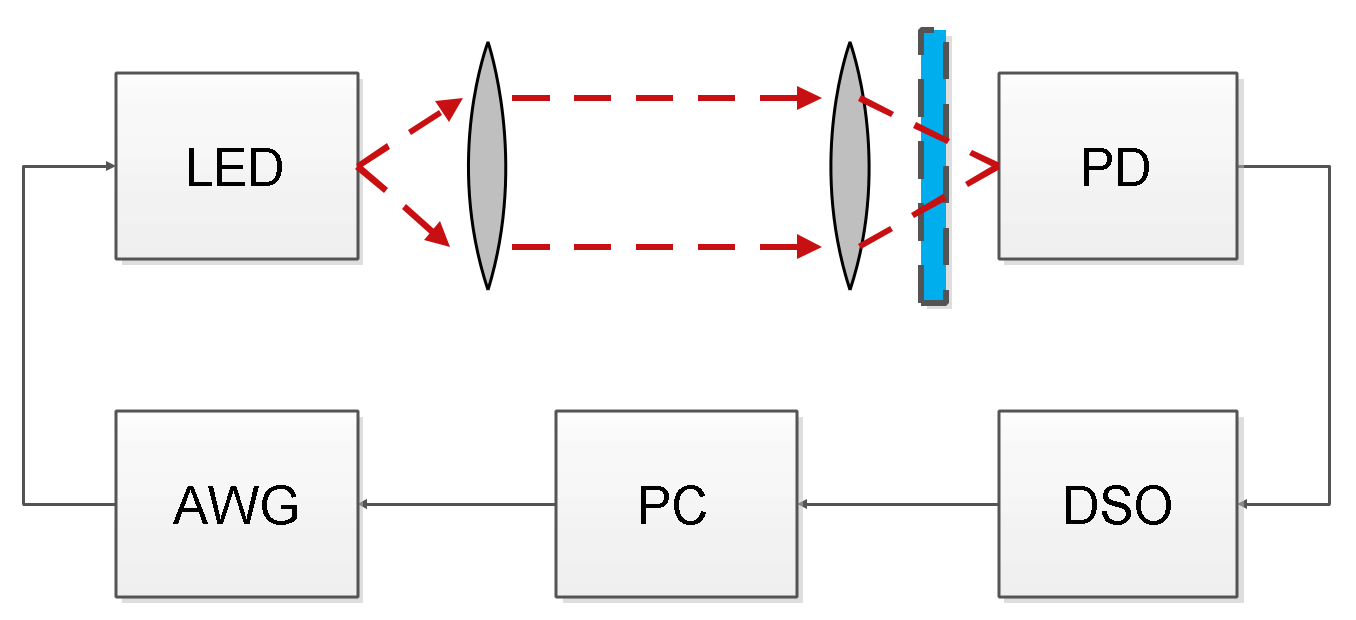
The experimental setup for the time domain method requires a multilevel random signal generator and digital storage oscilloscope (DSO) for recording the output signal. The setup schematic is shown in
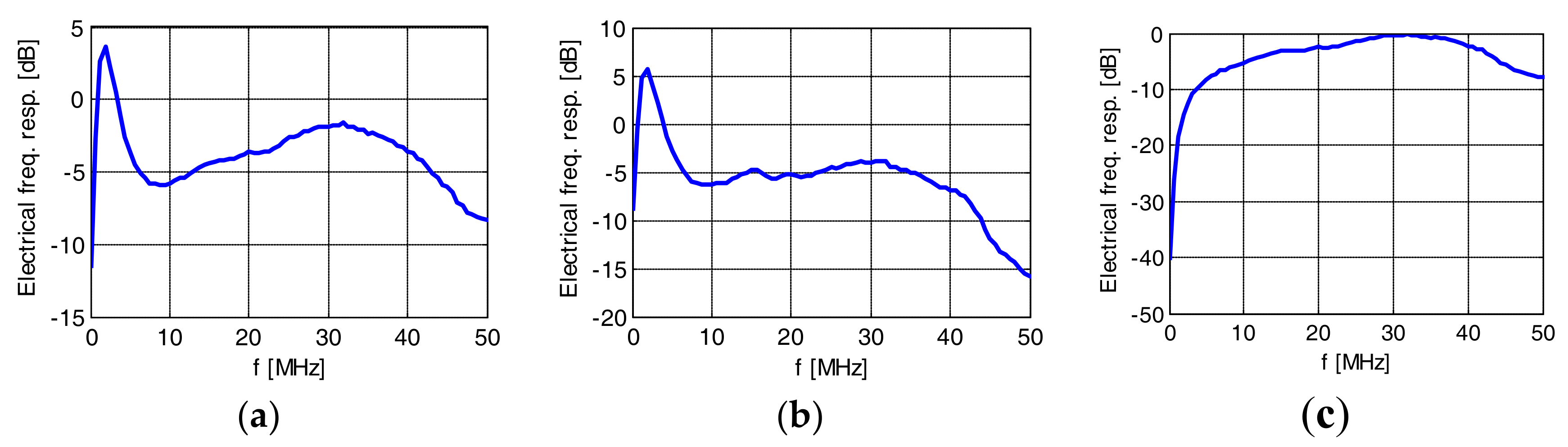
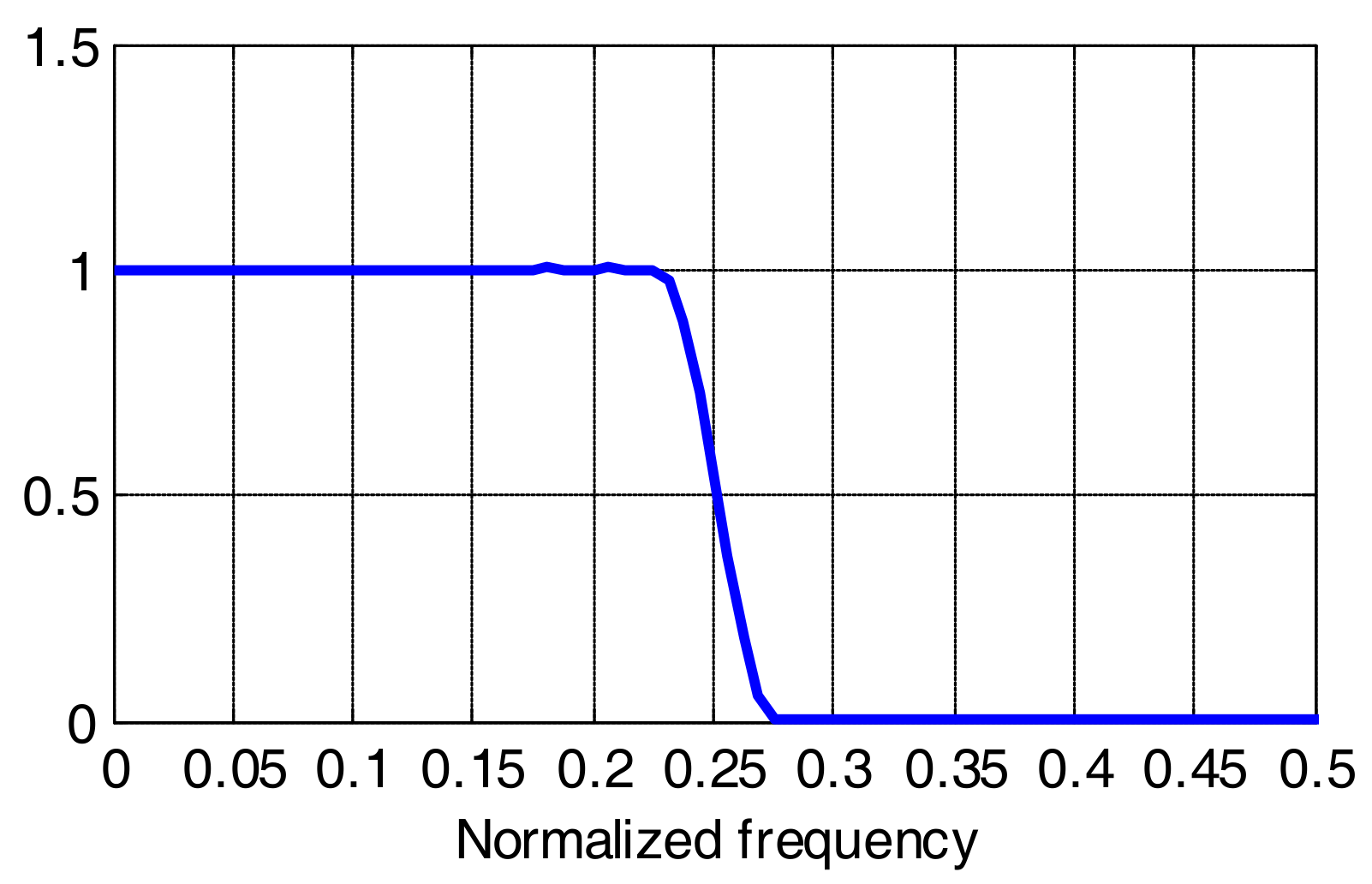
Figure 2. First, random symbols of the PAM-8 signal are generated offline in Matlab and upsampled with a factor of 2. Next, we apply a root raised cosine (RRC) filter with 0.1 roll-off coefficient to shape the signal spectrum to quasi-rectangular. The choice of the roll-off is a tradeoff between spectrum flatness, total symbol duration and peak to average power ratio (PAPR), which increases for lower roll-off values. At this value, the filter spectrum is flat up to approx. 0.9
r/2 (
Figure 3). The generated PAM signal is fed into AWG, which modulates the LED. The modulation index is different for different LEDs and scenarios. After short transmission in free space, the signal is photodetected and sampled in DSO. In the case of white phosphorescent LEDs, blue filtering is applied at the receiver. Further processing in Matlab involves resampling to 2
r, synchronization using the cross-correlation method, filtering with a matched RRC filter, averaging over all copies of the received sequence captured in one DSO frame (approx. 30) for additive Gaussian noise cancellation, downsampling to symbol frequency and LS estimation, as described above. It is noted that in the applied method, the received signal was AC coupled, so the estimated kernel depends on the bias current of the LED.
The applied time domain method also has some restrictions related to the spectral extent of the estimated kernel. As governed by the sampling theorem, the linear kernel (frequency response) can be measured up to r/2 (in addition, a 10% margin on the RRC response should be assumed). However, further restrictions to higher-order terms will apply. We illustrate this for the 2nd order kernel. Let us consider a LED probed with a single tone at frequency f1 that will generate a 2nd order harmonic at 2f1. This harmonic falls outside the RRC filter bandwidth at the receiver, and hence H(f1,f1) cannot be measured. It is noted that RRC filtering is necessary, as this harmonic would otherwise cause aliasing at frequency r − 2f1. Therefore, the 2nd order can be fully measured only up to |f1 + f2|< r/2 frequency. In general, the M-th order kernel can be estimated up to r/(2M) frequency.
It is noted that we assume that the LED is the dominating source of both the bandwidth limitation and nonlinearity in the system. The bandwidth of the detector was almost order of magnitude higher. We made sure that the detector is placed at the optimum distance from the transmitter to make sure that it is far from being saturated.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}