A Low-Cost Tracking System for Running Race Applications Based on Bluetooth Low Energy Technology

 , , and
, , and
Abstract
:1. Introduction
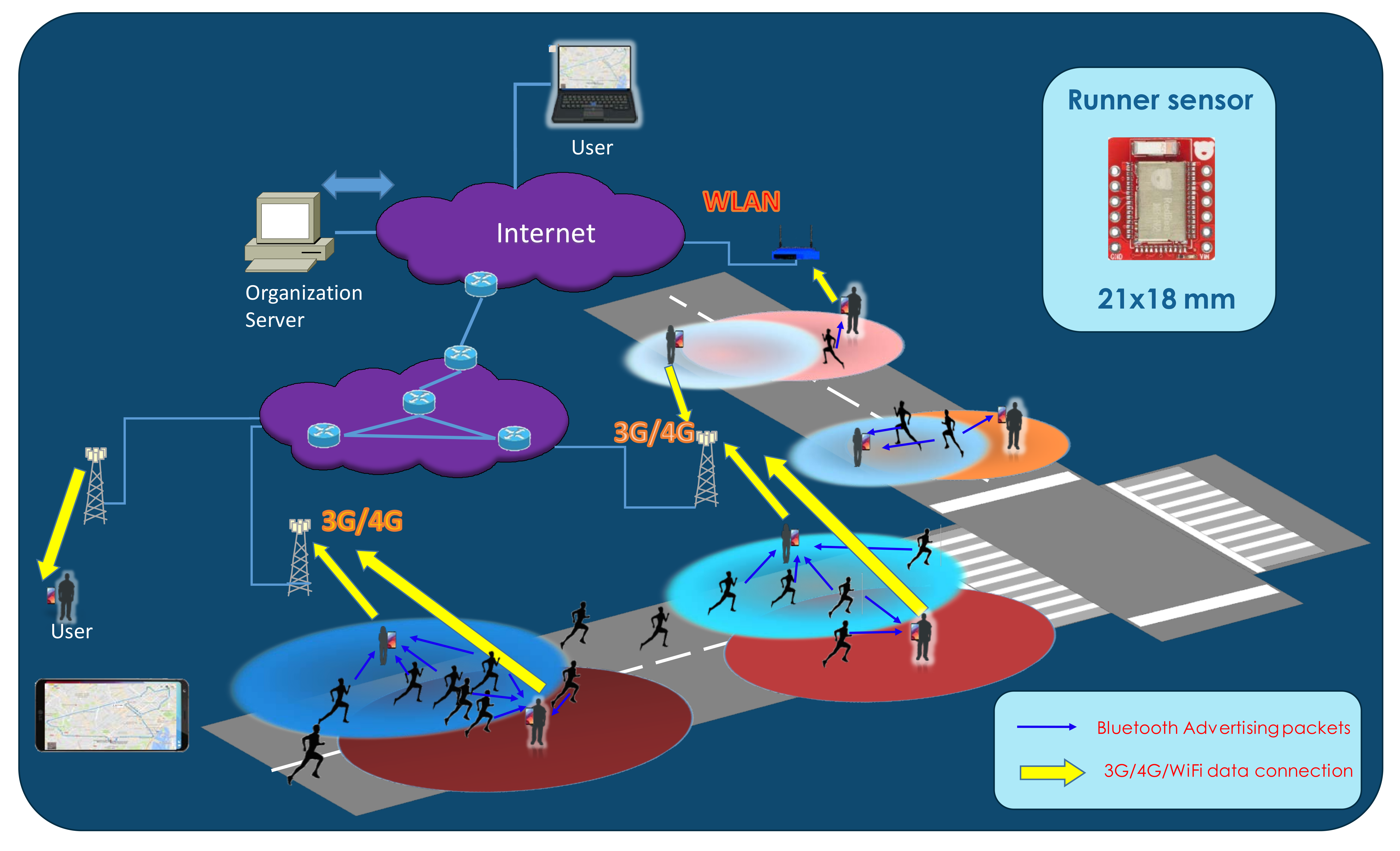
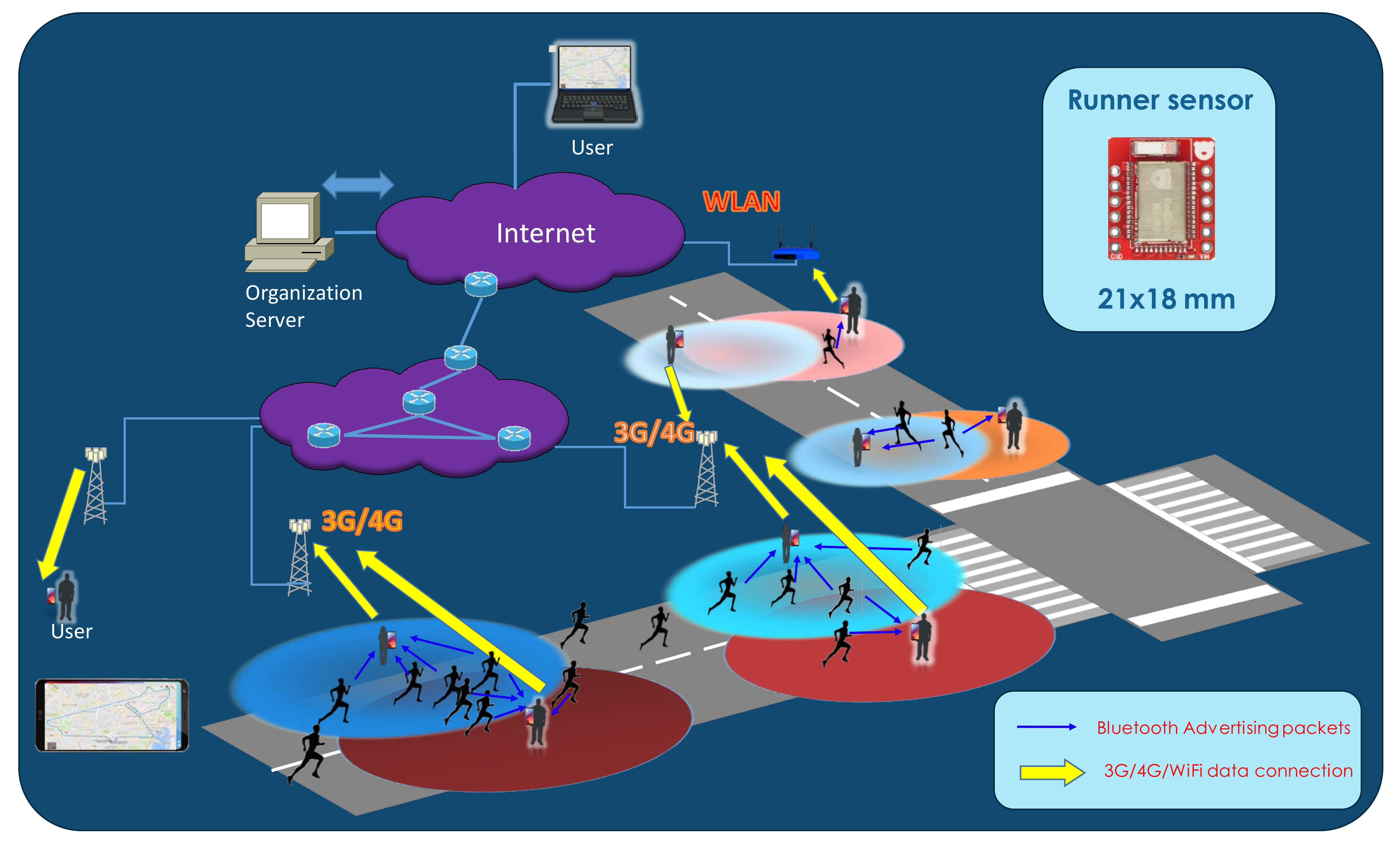
2. System Architecture
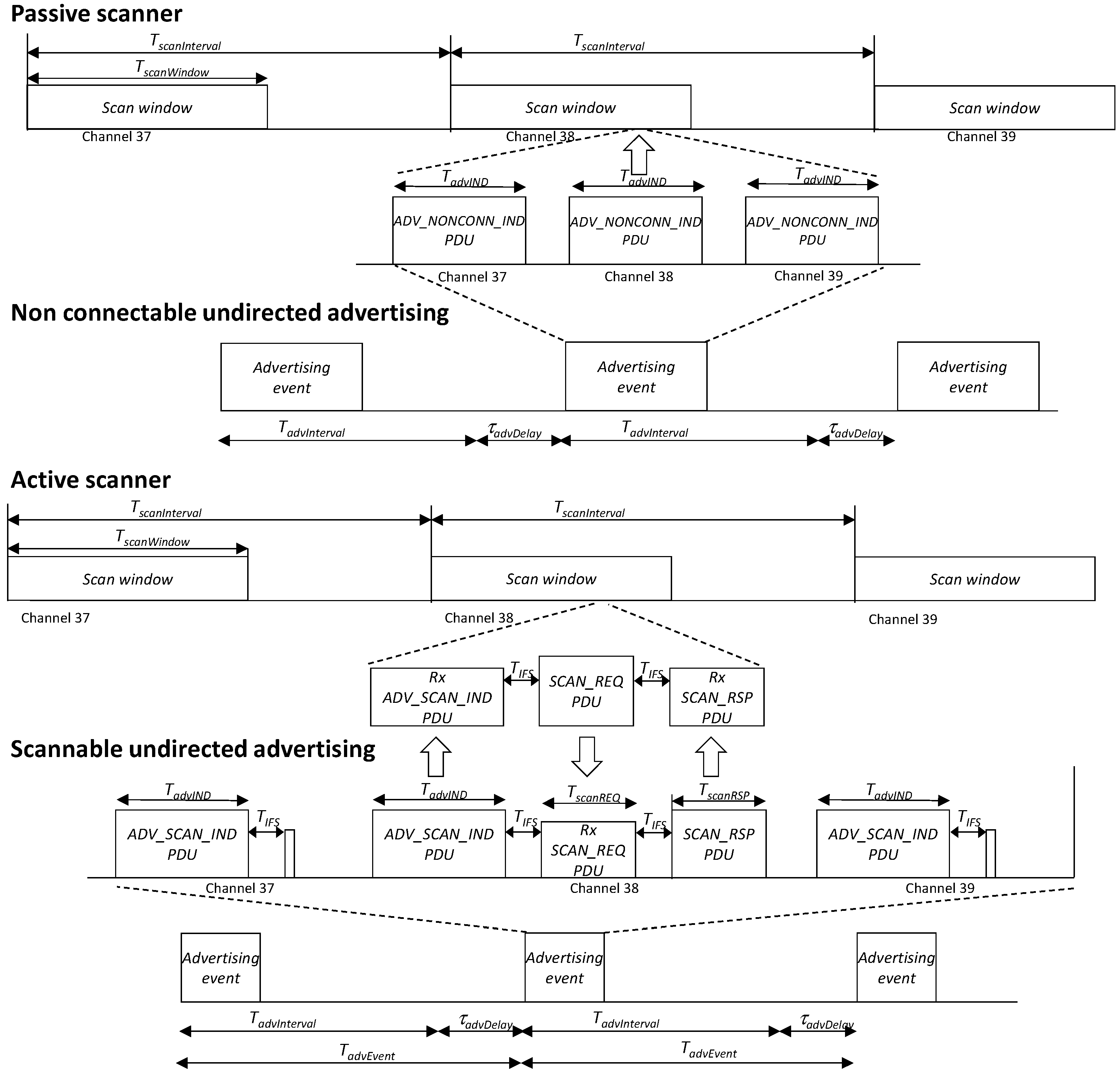
3. BLE Fundamentals Review
4. Application Requirements
5. Tests and Results
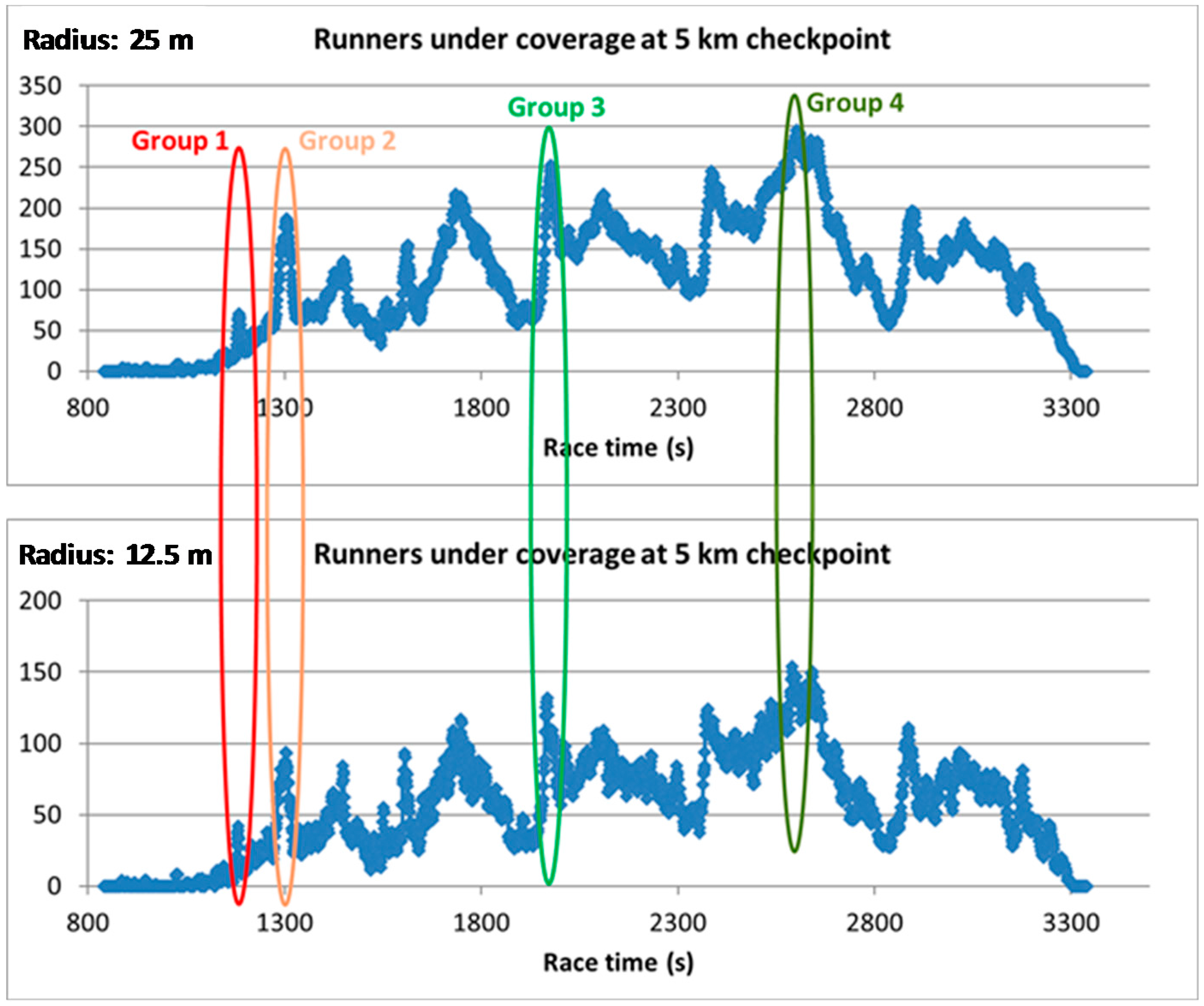
5.1. Coverage Test
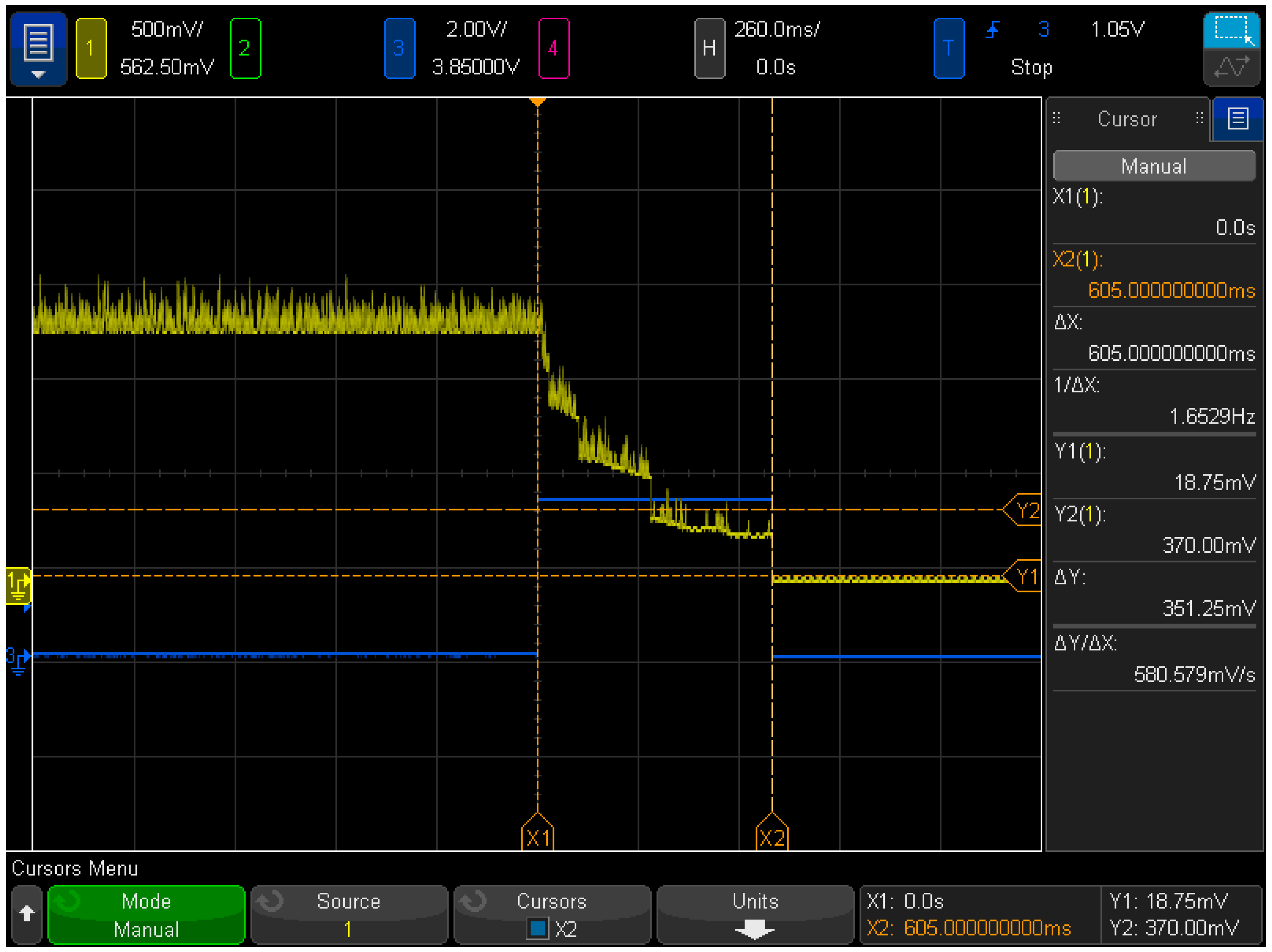
5.2. Current Consumption Results
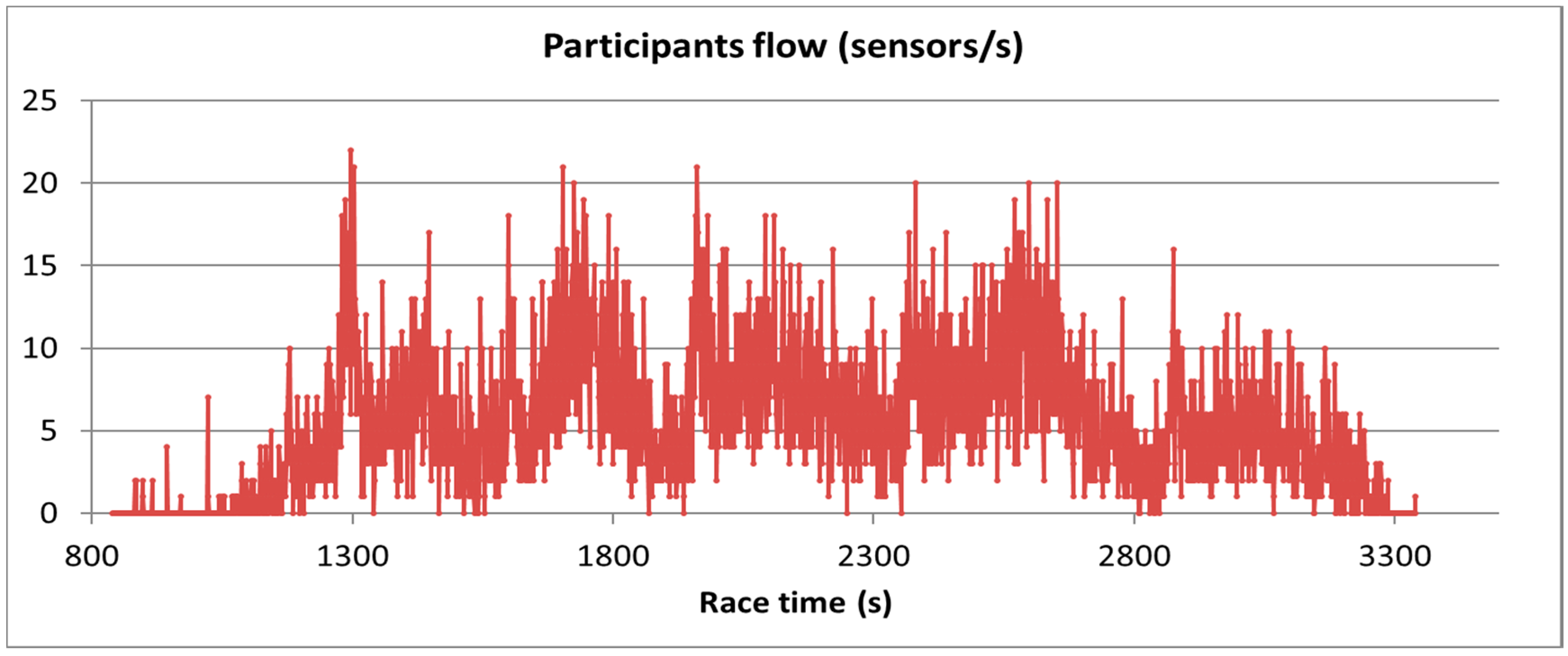
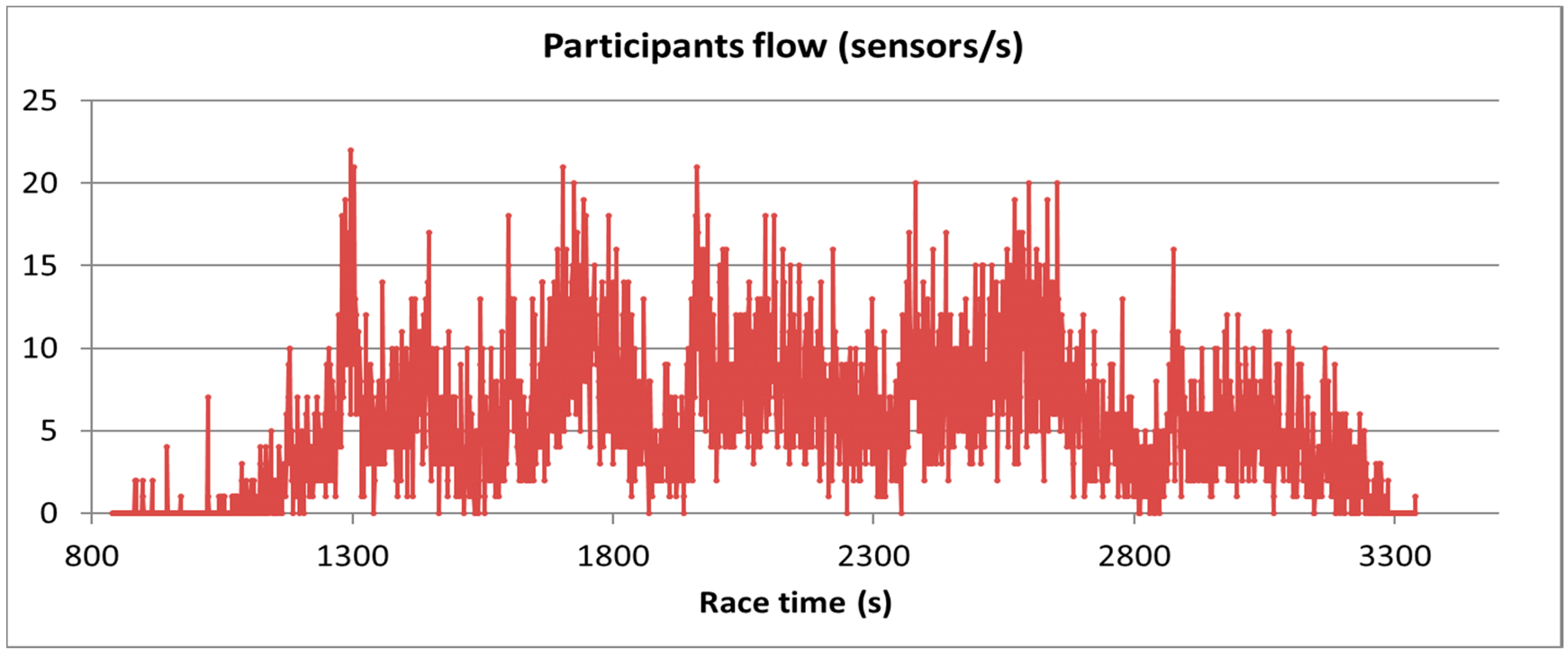
5.3. Flow Absorption Test
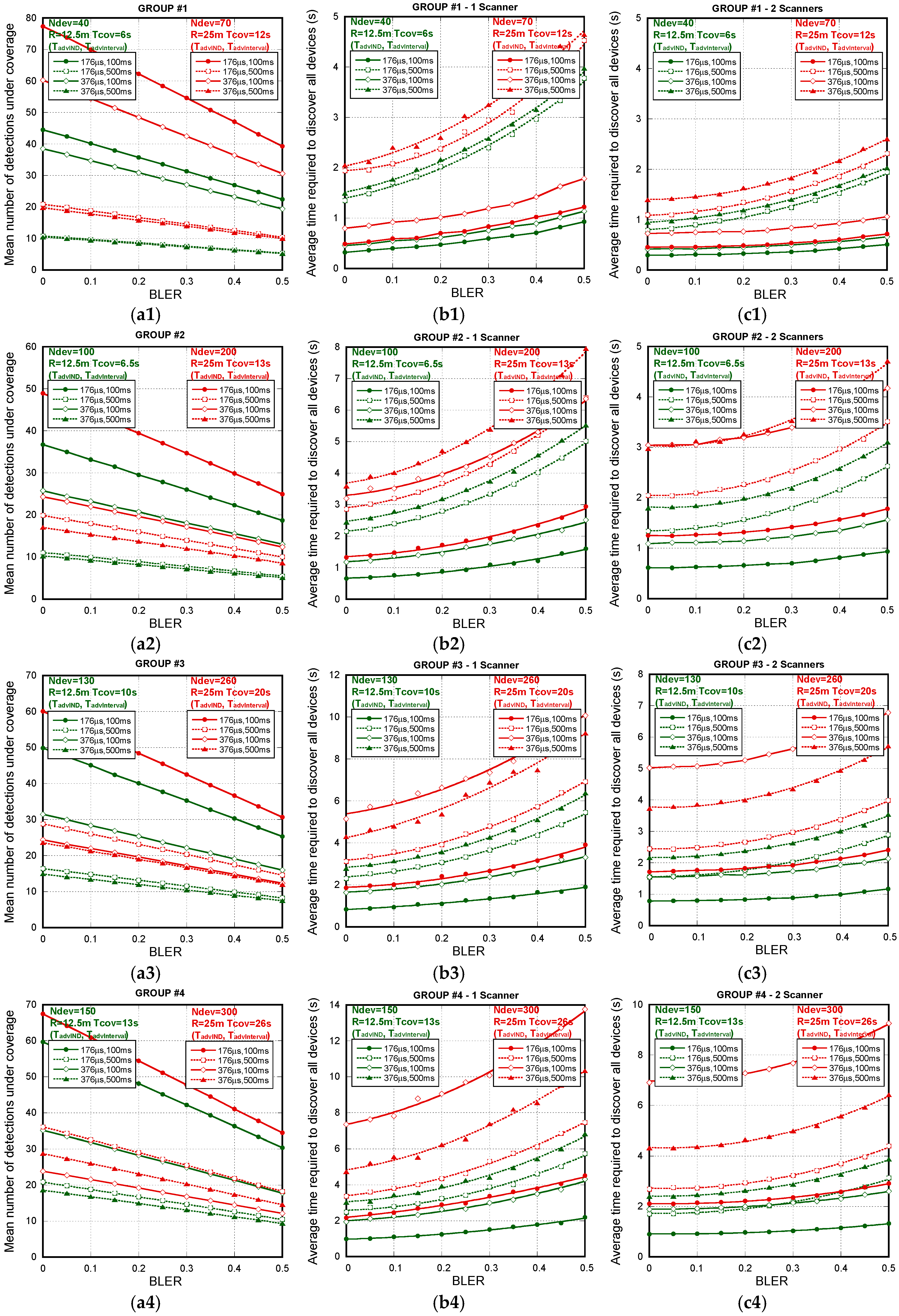
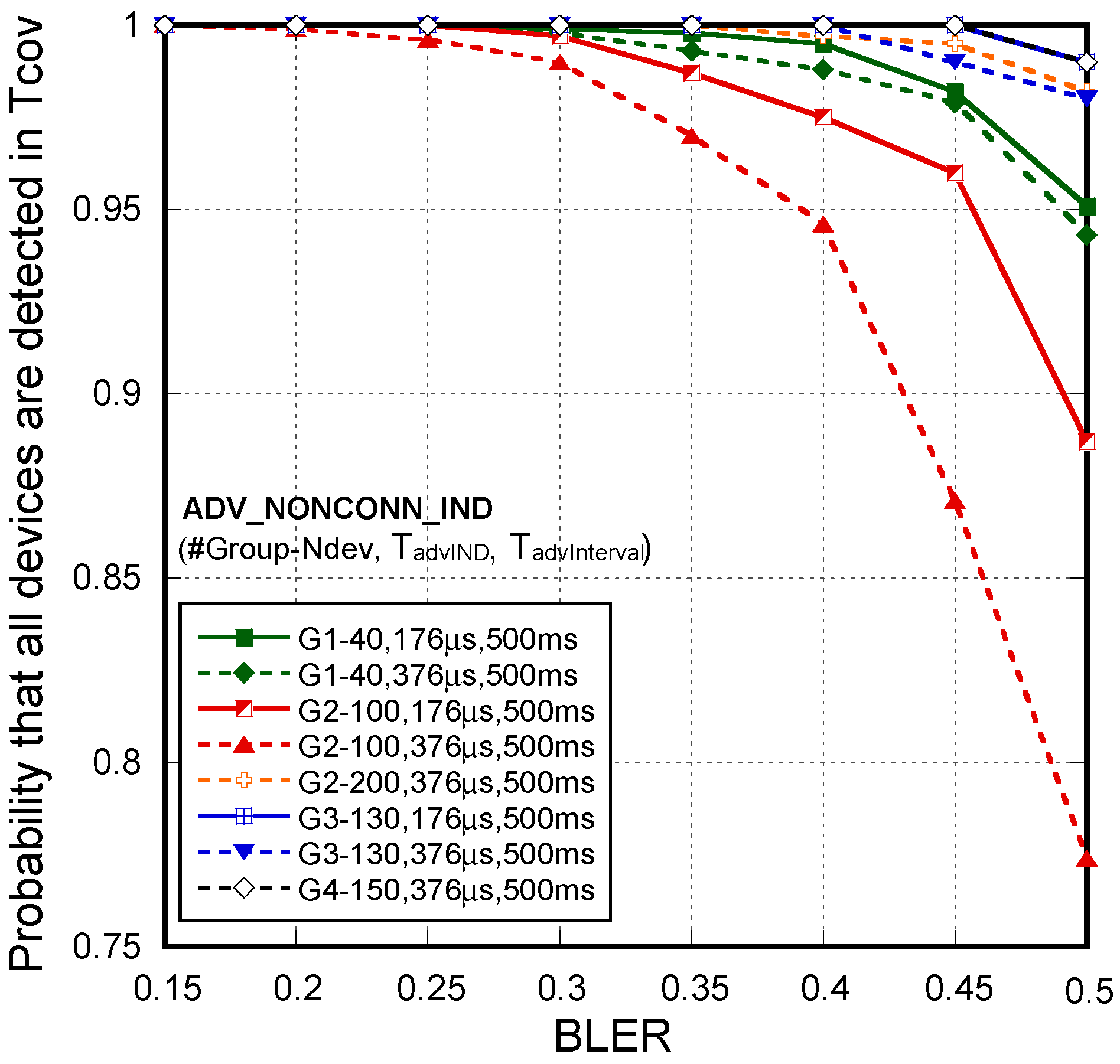
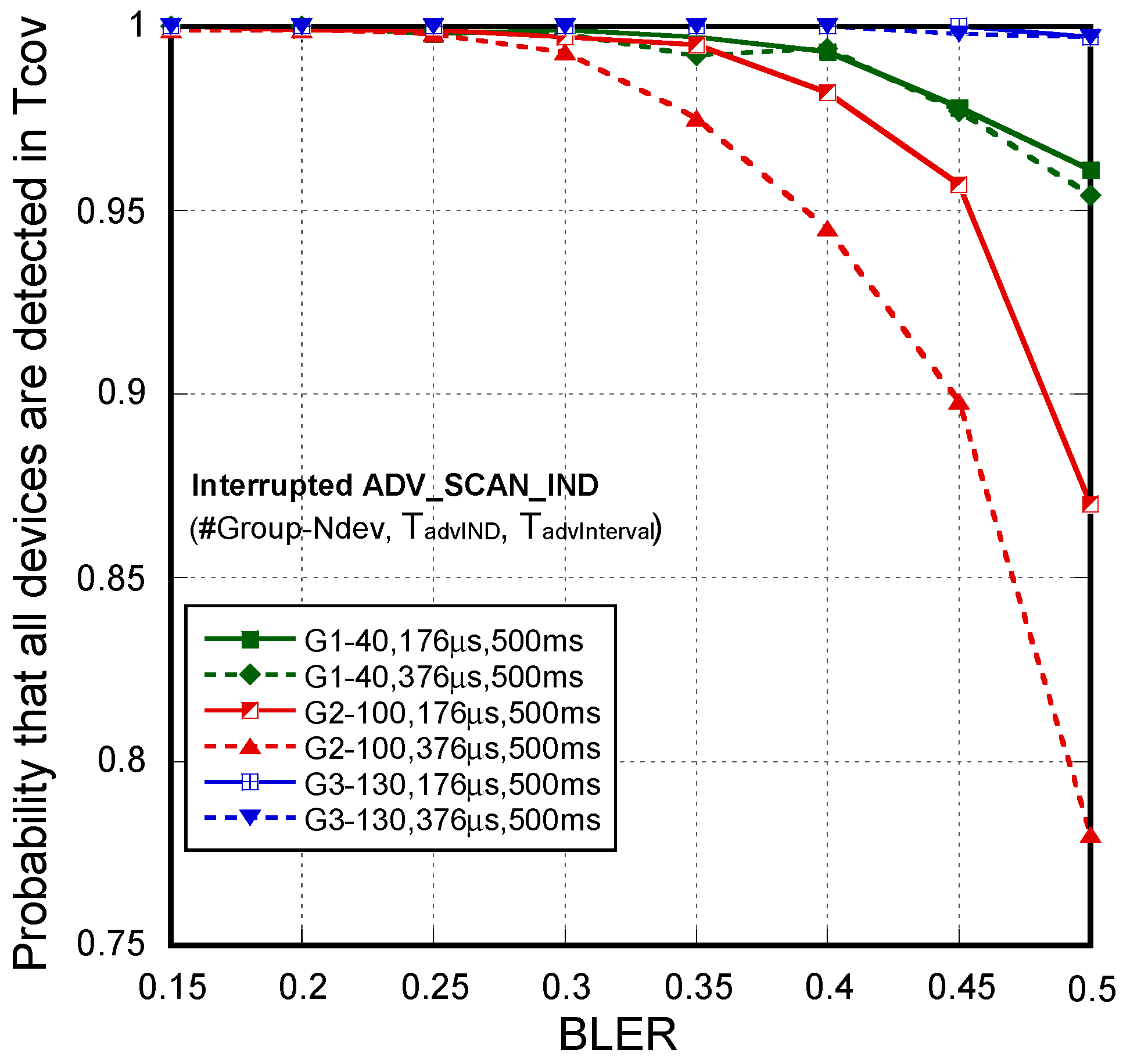
5.4. Simulation Results
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Running USA. U.S. Road Race Trends. 2017. Available online: http://www.runningusa.org/2017-us-road-race-trends (accessed on 28 December 2017).
- ChampionChip: Home. Available online: http://www.championchip.com.my/home/ (accessed on 14 February 2018).
- Innovative Timing Systems. Jaguar RFID Chip Race Timing Products. Available online: http://www.innovativetimingsystems.com/ (accessed on 14 March 2018).
- Race Result AG. Timing and Scoring of Sports Events. Available online: https://www.raceresult.com/en/home/index.php (accessed on 14 March 2018).
- Joolrat, S.; Saikaew, K.R.; Tengrungroj, M.; Jiranuwattanawong, P.; Janpanich, C.; Sornsakda, K. RFID data processing in a real-time monitoring system for marathons. Eng. Appl. Sci. Res. 2016, 43, 94–99. [Google Scholar]
- Satitsuksanoh, P.; Jiamthapthaksin, R.; Kim, S.W.; Setthawong, P. A cost-effective interactive platform for the management of a small scale lap-based jogging competition using low-frequency RFID technology. In Proceedings of the 2017 3rd International Conference on Science in Information Technology (ICSITech), Bandung, Indonesia, 25–26 October 2017; pp. 360–365. [Google Scholar]
- Alesii, R.; Di Marco, P.; Santucci, F.; Savazzi, P.; Valentini, R.; Vizziello, A. Backscattering UWB/UHF hybrid solutions for multi-reader multi-tag passive RFID systems. EURASIP J. Embed. Syst. 2016, 2016, 10. [Google Scholar] [CrossRef]
- Subedi, S.; Pauls, E.; Zhang, Y.D. Accurate Localization and Tracking of a Passive RFID Reader Based on RSSI Measurements. IEEE J. Radio Freq. Identif. 2017, 1, 144–154. [Google Scholar] [CrossRef]
- Basalamah, A. Sensing the Crowds Using Bluetooth Low Energy Tags. IEEE Access 2016, 4, 4225–4233. [Google Scholar] [CrossRef]
- Jeon, W.S.; Dwijaksara, M.H.; Jeong, D.G. Performance Analysis of Neighbor Discovery Process in Bluetooth Low Energy Networks. IEEE Trans. Veh. Technol. 2016, 66, 1865–1871. [Google Scholar] [CrossRef]
- Cho, K.; Park, G.; Cho, W.; Seo, J.; Han, K. Performance analysis of device discovery of Bluetooth Low Energy (BLE) networks. Comput. Commun. 2015, 81, 72–85. [Google Scholar] [CrossRef]
- Hernández-Solana, Á.; Perez-Diaz-de-Cerio, D.; Valdovinos, A.; Valenzuela, J.L. Proposal and Evaluation of BLE Discovery Process Based on New Features of Bluetooth 5.0. Sensors 2017, 17, 1988. [Google Scholar] [CrossRef] [PubMed]
- Perez Diaz de Cerio, D.; Hernandez, A.; Valenzuela, J.L.; Valdovinos, A. Analytical and experimental performance evaluation of BLE neighbor discovery process including non-idealities of real chipsets. Sensors 2017, 17, 499. [Google Scholar] [CrossRef] [PubMed]
- Harris, K.M.; Creswell, L.L.; Haas, T.S.; Thomas, T.; Tung, M.; Isaacson, E.; Garberich, R.F.; Maron, B.J. Death and Cardiac Arrest in U.S. Triathlon Participants, 1985 to 2016. Ann. Intern. Med. 2017, 167, 529. [Google Scholar] [CrossRef] [PubMed]
- Waite, O.; Smith, A.; Madge, L.; Spring, H.; Noret, N. Sudden cardiac death in marathons: A systematic review. Phys. Sportsmed. 2016, 44, 79–84. [Google Scholar] [CrossRef] [PubMed]
- Gomez, C.; Oller, J.; Paradells, J. Overview and Evaluation of Bluetooth Low Energy: An Emerging Low-Power Wireless Technology. Sensors 2012, 12, 11734–11753. [Google Scholar] [CrossRef]
- Bluetooth SIG. Bluetooth Core Specification 5.0. Available online: https://www.bluetooth.com/specifications/adopted-specifications (accessed on 15 August 2017).
- ChampionChip. Barcelona Marathon Results. 2017. Available online: https://xipgroc.cat/ca/curses/MaratoBCN2017/42k/resultats (accessed on 19 February 2018).
- Red Bear Company. BLE Nano. Available online: http://redbearlab.com/blenano/ (accessed on 14 March 2018).





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Tx Power (dBm) | Static Sensors | Sensors Moving at 25 km/h |
|---|---|---|
| 4 dBm | 400 m | 185 m |
| −8 dBm | 160 m | 70 m |
| −20 dBm | 23 m | 10 m |
| −40 dBm | 6 m | 2 m |
| Advertisement Interval | 1 Data Byte | 10 Data Bytes | 26 Data Bytes |
|---|---|---|---|
| 100 ms | 17.5 µA | 19.5 µA | 20.25 µA |
| 300 ms | 10.5 µA | 11 µA | 12 µA |
| 500 ms | 9.5 µA | 9.7 µA | 9.9 µA |
| Tcov Required for All Detected (s)/Average Time Required to Discover All the Devices (s) | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Ndev | 100 | 150 | 200 | 260 | 300 | |||||||
| TadvIND | NSC | 1 | 2 | 1 | 2 | 1 | 2 | 1 | 2 | 1 | 2 | |
| TadvInterval | ||||||||||||
| 176 µs | 0.1 s | 3/1.08 | 2/0.70 | 4/1.35 | 3/1.04 | 5/1.92 | 4/1.41 | 6/2.65 | 5/1.92 | 7/3.36 | 6/2.35 | |
| 0.5 s | 8/3.33 | 5/1.80 | 9/3.65 | 6/2.18 | 10/4.28 | 6/2.52 | 11/4.79 | 7/2.97 | 11/5.31 | 7/3.24 | ||
| 376 µs | 0.1 s | 5/1.78 | 3/1.23 | 7/2.38 | 6/2.15 | 10/4.52 | 6/3.40 | 15/7.35 | 11/5.62 | 22/10.07 | 16/7.68 | |
| 0.5 s | 9/3.73 | 7/2.18 | 11/4.46 | 7/2.86 | 12/5.38 | 7/3.53 | 14/6.88 | 11/4.35 | 20/7.37 | 11/4.98 | ||
| Tcov Required for All Detected (s)/Average Time Required to Discover All the Devices (s) | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Ndev | 100 | 150 | 200 | 260 | 300 | |||||||
| TadvIND | NSC | 1 | 2 | 1 | 2 | 1 | 2 | 1 | 2 | 1 | 2 | |
| TadvInterval | ||||||||||||
| 176 µs | 0.1 s | 2/0.86 | 2/0.57 | 2/1.12 | 2/0.74 | 3/1.39 | 2/0.93 | 3/1.76 | 2/1.20 | 3/2.06 | 3/1.40 | |
| 0.5 s | 7/3.16 | 6/2.26 | 8/3.64 | 6/2.62 | 9/3.98 | 7/2.90 | 9/4.34 | 7/3.13 | 9/4.54 | 7/3.30 | ||
| 376 µs | 0.1 s | 2/1.11 | 2/0.75 | 3/1.56 | 2/1.07 | 5/2.41 | 3/1.47 | 5/3.08 | 3/2.12 | 6/3.94 | 4/2.70 | |
| 0.5 s | 7/3.42 | 6/2.45 | 8/3.92 | 7/2.85 | 10/4.37 | 7/3.15 | 11/4.90 | 7/3.56 | 11/5.25 | 8/3.80 | ||
| Tcov Required for All Detected (s)/Tcov Required for All Off (s) | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Ndev | 20 | 40 | 70 | ||||||||||
| TadvIND | 176 µs | 376 µs | 176 µs | 376 µs | 176 µs | 376 µs | |||||||
| TadvInterval | 0.1 s | 0.5 s | 0.1 s | 0.5 s | 0.1 s | 0.5 s | 0.1 s | 0.5 s | 0.1 s | 0.5 s | 0.1 s | 0.5 s | |
| BLER | |||||||||||||
| 0 | 1/1 | 5/5 | 1/1 | 5/5 | 1/1 | 5/5 | 1/1 | 6/6 | 1/1 | 5/5 | 2/2 | 5/6 | |
| 0.05 | 1/1 | 5/5 | 1/1 | 5/5 | 1/1 | 6/6 | 1/2 | 6/6 | 1/2 | 5/6 | 2/2 | 5/6 | |
| 0.1 | 1/1 | 5/6 | 1/1 | 5/6 | 1/2 | 6/7 | 1/2 | 6/6 | 2/2 | 6/7 | 2/2 | 6/7 | |
| 0.15 | 1/2 | 5/7 | 1/2 | 5/6 | 2/2 | 7/7 | 1/2 | 6/8 | 2/2 | 6/8 | 2/2 | 6/8 | |
| 0.2 | 1/2 0.99 off | 6/9 | 1/2 0.96 off | 6/10 | 2/2 | 7/8 | 2/2 | 6/8 | 2/2 | 7/9 | 2/2 | 7/8 | |
| 0.25 | 2/2 | 6/9 | 2/2 | 6/10 | 2/2 | 8/11 | 2/2 | 7/11 | 2/3 | 7/10 | 2/3 | 7/11 | |
| 0.3 | 2/2 | 7/10 | 2/3 | 7/10 | 2/3 | 8/11 | 2/3 | 7/11 | 2/3 | 7/11 | 2/3 | 7/13 | |
| 0.35 | 2/2 | 7/12 | 2/3 | 9/13 | 2/3 | 8/11 | 2/3 | 7/14 | 2/4 | 8/13 | 3/4 | 9/14 | |
| 0.4 | 2/3 | 8/15 | 2/3 | 9/14 | 2/5 | 8/19 | 2/5 | 7/16 | 2/4 | 9/17 | 3/4 | 9/20 | |
| 0.45 | 2/4 | 8/22 | 2/5 | 9/18 | 2/4 | 9/20 | 2/5 | 8/18 | 3/5 | 9/17 | 3/6 | 10/20 | |
| 0.5 | 2/6 0.79 off | 10/25 0.89 off | 2/5 0.97 off | 9/21 0.67 off | 3/5 0.93 off | 9/22 0.54 off | 3/5 0.90 off | 11/25 0.75 off | 3/5 0.84 off | 10/23 0.48 off | 3/6 0.70 off | 10/26 0.41 off | |
| Tcov Required to All Detected (s)/Tcov Required to All off (s) | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Ndev | 20 | 40 | 70 | ||||||||||
| TadvIND | 176 µs | 376 µs | 176 µs | 376 µs | 176 µs | 376 µs | |||||||
| TadvInterval | 0.1 s | 0.5 s | 0.1 s | 0.5 s | 0.1 s | 0.5 s | 0.1 s | 0.5 s | 0.1 s | 0.5 s | 0.1 s | 0.5 s | |
| BLER | |||||||||||||
| 0 | 1/1 | 4/5 | 1/1 | 5/5 | 1/1 | 5/5 | 1/1 | 5/5 | 1/1 | 6/6 | 1/2 | 5/5 | |
| 0.05 | 1/1 | 5/5 | 1/1 | 5/5 | 1/1 | 5/5 | 1/1 | 5/5 | 1/1 | 6/6 | 1/2 | 6/6 | |
| 0.1 | 1/1 | 5/5 | 1/1 | 5/5 | 1/1 | 5/5 | 1/1 | 5/5 | 1/1 | 6/6 | 1/2 | 6/6 | |
| 0.15 | 1/1 | 5/5 | 1/1 | 5/6 | 1/1 | 5/5 | 1/1 | 5/6 | 1/1 | 6/6 | 1/2 | 6/6 | |
| 0.2 | 1/1 | 5/5 | 1/1 | 5/6 | 1/1 | 5/7 | 1/2 | 5/6 | 1/2 | 6/6 | 1/2 | 6/6 | |
| 0.25 | 1/2 | 5/6 | 1/2 | 6/6 | 1/2 | 5/7 | 1/2 | 5/6 | 1/2 | 6/7 | 2/2 | 6/7 | |
| 0.3 | 1/2 | 5/7 | 1/2 | 6/7 | 1/2 | 5/7 | 1/2 | 5/6 | 1/2 | 6/7 | 2/2 | 6/8 | |
| 0.35 | 1/2 | 5/7 | 1/2 | 6/7 | 1/2 | 6/8 | 1/2 | 5/7 | 1/2 | 6/9 | 2/2 | 6/8 | |
| 0.4 | 1/2 | 5/8 | 1/2 | 6/9 | 1/2 | 6/9 | 1/2 | 6/7 | 1/2 | 7/11 | 2/3 | 6/9 | |
| 0.45 | 1/2 0.91 off 0.903 | 5/10 | 1/3 | 6/12 | 1/2 | 6/10 | 2/2 | 7/11 | 2/3 | 7/11 | 2/3 | 7/14 | |
| 0.5 | 1/3 0.76 off | 6/10 0.92 off | 1/3 0.69 off | 6/12 0.90 off | 2/3 0.99 off | 6/12 0.83 off | 2/3 0.99 off | 7/13 0.89 off | 2/3 0.97 off | 7/12 0.86 off | 2/4 0.95 off | 7/14 0.81 off | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Perez-Diaz-de-Cerio, D.; Hernández-Solana, Á.; Valdovinos, A.; Valenzuela, J.L. A Low-Cost Tracking System for Running Race Applications Based on Bluetooth Low Energy Technology. Sensors 2018, 18, 922. https://doi.org/10.3390/s18030922
Perez-Diaz-de-Cerio D, Hernández-Solana Á, Valdovinos A, Valenzuela JL. A Low-Cost Tracking System for Running Race Applications Based on Bluetooth Low Energy Technology. Sensors. 2018; 18(3):922. https://doi.org/10.3390/s18030922
Chicago/Turabian StylePerez-Diaz-de-Cerio, David, Ángela Hernández-Solana, Antonio Valdovinos, and Jose Luis Valenzuela. 2018. "A Low-Cost Tracking System for Running Race Applications Based on Bluetooth Low Energy Technology" Sensors 18, no. 3: 922. https://doi.org/10.3390/s18030922
APA StylePerez-Diaz-de-Cerio, D., Hernández-Solana, Á., Valdovinos, A., & Valenzuela, J. L. (2018). A Low-Cost Tracking System for Running Race Applications Based on Bluetooth Low Energy Technology. Sensors, 18(3), 922. https://doi.org/10.3390/s18030922