1. Introduction
We are interested in high precision positioning for shortwave signal sources in this paper. Two-step methods, such as the Angle Of Arrival (AOA) method, were usually used for shortwave signal positioning, and the methods provided a poor performance in a low Signal Noise Ratio (SNR) scenario. It has been shown that available prior knowledge on deterministic multi-path components can be beneficial for localization [
1]. Kietlinski-Zaleski Jan presented techniques to benefit from signal reflections from known indoor features such as walls [
2]. Inspired by those ideas, we propose a novel geolocation system architecture to locate the shortwave sources. This new architecture, termed “Multiple Transponders and Multiple Receivers for Multiple Emitters Positioning System (MTRE)”, uses multiple transponders and receivers with known locations to locate multiple narrow band signals. The raw signals are transferred “in band” (i.e., as a man-made multi-path) by the transponders, and there is no need for a network infrastructure or an out-of-band channel bandwidth, which are required in an up/down converter system. In order to avoid the interference between the receiving and the sending signals of a transponder, we use different polarization modes to isolate the signals. In an MTRE system, man-made multiple paths from an emitter to a receiver are made to improve the positioning precisions and extending the positioning range.
Multi-path propagation is a really important problem in outdoor and indoor positioning systems, and it is still the main source of estimation errors for range-based indoor localization approaches [
3,
4]. The recent research in dealing with multi-path either tries to detect these situations statistically based on the received signals [
5,
6] or to directly mitigate the corresponding errors with statistical techniques [
7,
8]. Some algorithms for indoor localization make use of, e.g., the cooperation of multiple agents to overcome multi-path situations [
9]. Arrays were used for beam-forming to separate signals from different directions, and the multi-path positioning problem is simplified into a single path positioning problem [
10,
11]. Furthermore, location fingerprinting, e.g., Received Signal Strength (RSS)-based methods, has been widely used in harsh environments [
12,
13]. It makes use of a priori training signals in multiple regions of the environment to train a classification algorithm [
14]. However, the required training phase, as well as the missing flexibility w.r.t. changes in the environment may limit its application.
Most of the above literature focused on the UWB signals and indoor positioning applications, and two-step approaches were adopted to locate the emitters. The very high bandwidth of the UWB signal translates into very good time resolution and makes the UWB signal resistant to multi-path. It is possible to extract parameters, e.g., RSS, Time Of Arrival (TOA), AOA, Time Difference Of Arrival (TDOA) and Frequency Difference Of Arrival (FDOA), from UWB signals in the presence of multi-path propagation and to locate the emitter based on those parameters [
15,
16]. However, narrow-band systems have a low time resolution, and it is difficult to get the measurements in the first step.
The Direct Position Determination (DPD) methods were proposed in [
17] for single narrow band signal positioning and in [
18] for multiple narrow band signal positioning. A DPD approach collects data at all sensors together and uses both the array responses and the Times Of Arrival (TOA) at each array, in contradiction with the two separate steps: parameter measuring and location determination. From the optimization theory point of view, two-step methods are sub-optimal, since the parameter estimation in the first phase is done independently, without considering the constraints that the measurements must correspond to the same source position. DPD methods overcame the problem of associating estimated parameters with their relevant sources and was shown to outperform two-step methods, especially in low SNR scenarios [
19].
There have been only a few attempts to improve the accuracy of emitter positioning in the presence of multi-path propagation under the DPD framework. Most of the existing DPD methods were developed for a single-path channel in which the multi-path was modeled as additive noise [
20]. In [
20], the single path DPD was tested with a channel with two paths scenario and showed improved performance over two-step methods. The DPD with small local scattering was studied in [
21,
22]. In a scattering scenario, sensors were affected by a set of virtual emitters, which were placed randomly in close proximity to the real emitter. It was assumed that the positions of the virtual emitters were i.i.d, and each position forms a 3D Gaussian distribution. Odel Bialer and Dan Paphaeli and Anthony J. Weiss [
23,
24] proposed a positioning algorithm for a dense multipath environment. Each received signal was obtained by convolving the transmitted pulse with a channel impulse response, and only the first arrival cluster (the direct path) was taken into consideration in their work. The signals reflected from other objects were not modeled in their work.
Papakonstantinou and Slock [
25,
26] considered a simplified single-bounce multipath model. The model assumed that the transmitted signal did not bounce over more than one scatter. They jointly estimated the position of the target and scatters. They studied the single emitter positioning problem in the presence of multi-path propagation and assumed that the waveform of signal and path attenuations were known in advance. Miljko and Vucic [
27] proposed a novel direct geolocation of an Ultra WideBand (UWB) source in the presence of multi-path using the MUltiple SIgnal Classification (MUSIC) method and focusing matrices. Only one emitter was taken into consideration, and the path attenuations are known in advance in their work. Bar-Shalom et al. [
28,
29] proposed a transponder-added Single Platform Geolocation (SPG) model. A single emitter and single receiver were assumed in the SPG model. They stated that the SPG model achieved a similar performance to the multiple-RX DPD algorithm. The multiple-RX DPD algorithm mentioned in their works assumed that the transponders were replaced by the receivers directly. In a weak signal location application, a single receiver cannot receive signals from all transponders stably. Some paths may be blocked or disrupted. Multiple emitters, multiple transponders and multiple receivers need to be taken into consideration in a weak signal positioning application.
All unknown parameters should be estimated together in a DPD model, and this leads to a large-scale parameter searching. MUSIC methods calculate the spatial spectrum of each candidate position rather than the combinations of all emitter positions. Amar et al. [
30] studied that multiple known and unknown radio-frequency signals under the LoS (Line of Sight) channel assumption. A simplified MUSIC algorithm was adopted to avoid the large-scale parameter searching. The cost function in [
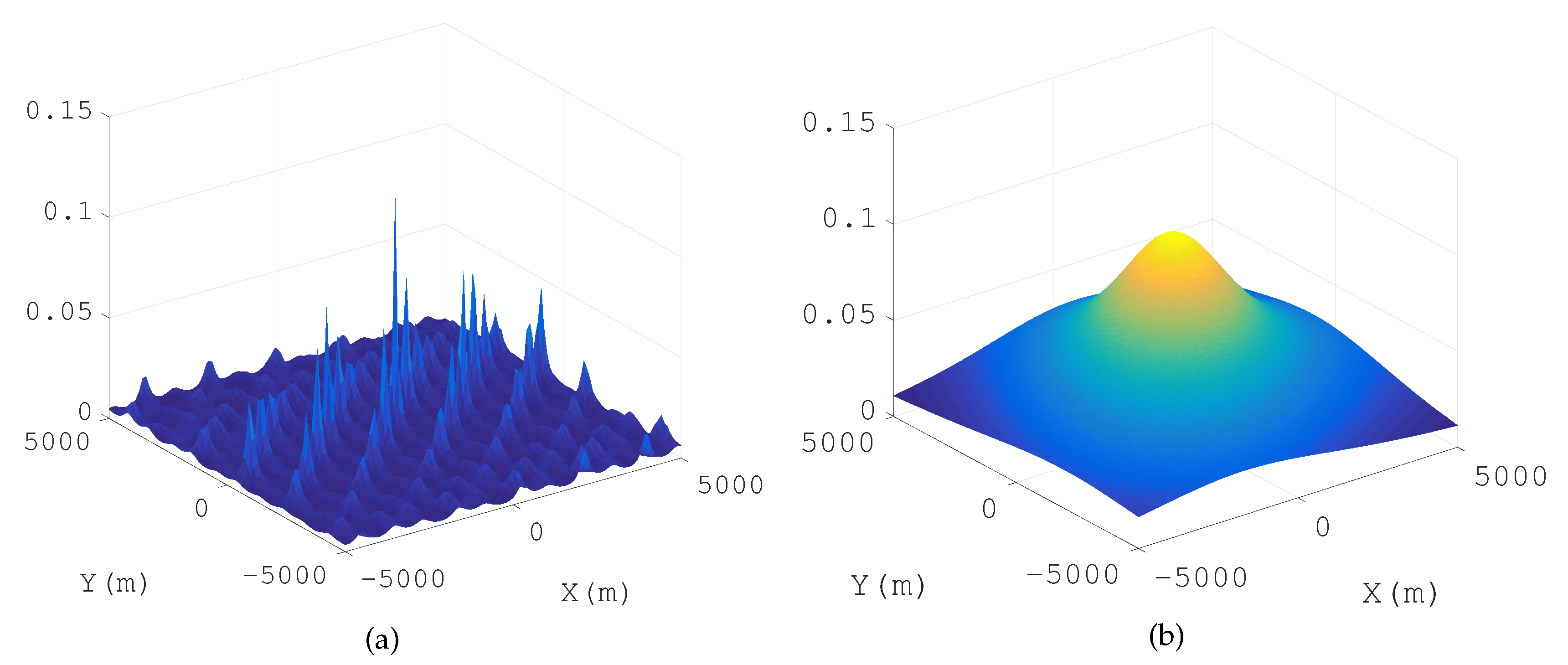
30] maximized the projection of the array manifold onto the signal subspace rather than minimizing the projection onto the noise subspace. The simplified cost function took advantage of the maximization of the convex Quadratic Programming (QP) with linear constraints, and the eigenvalue structure was adopted to avoid the searching of path attenuation parameters in their work. The simplified MUSIC worked well in an LoS propagation context, but it had a poor performance in a multi-path propagation scenario due to the singularity of the array manifold. Minimizing the projection of the array manifold onto the noise subspace overcomes the shortcomings of a signal subspace projection method. However, the eigenvalue system fails to resolve the minimization programming.
Existing DPD methods mainly focus on narrow-band signal positioning [
18,
29,
31,
32,
33] and usually assume that the carrier phase does not carry the propagation delay information. Complex channel attenuations were estimated to eliminate the influence of carrier phase misalignment in a narrow-band signal positioning method. We point out that the narrow-band assumption will lose the phase information in an LoS positioning application, and it will not be able to locate emitters at all in a multi-path positioning application. We add constraints that path attenuations are nonnegative real numbers in our model. In an existing DPD model, path attenuations are complex numbers and have only one equation constraint (the norm of path attenuations is one), and the Lagrange-multiplier method is very effective at solving the optimization with equation constraints [
34]. However, it is difficult to solve an optimization with inequality constraints (the path attenuations should be greater than zero). We are required to design an efficient algorithm to solve the QP with inequality constraints.
The performance of a MUSIC method is determined by the precision of the covariance matrix estimation. In a time-sensitive application, the number of snapshots is not enough, and it is difficult to estimate the covariance matrix precisely. The maximum likelihood method maximizes the likelihood function of the received data rather than estimating the covariance matrix, and it achieves a better performance than that of the MUSIC method. However, the dimension of the searching space turns out to be unacceptable in the maximum likelihood method.
Our motivation is to develop a simple and accurate positioning model and corresponding algorithms for the case of unknown waveform signals and multi-path environment. We establish a Multi-path Propagation (MP)-DPD model for the scenario of multiple emitters, multiple transponders and multiple receiving arrays. It can be viewed as a modified and extended version of the SPG model proposed in [
29]. The MP-DPD reduces the risk of paths being blocked or disrupted and fixes the constraints on path attenuations. Multiple emitters can be simultaneously positioned in the MP-DPD model, as well. MP-MUSIC and MP-ML methods are proposed to reduce the time consumption of the optimization. The numerical results and the Cramér–Rao Lower Bound (CRLB) analysis show that the MP-MUSIC method has a lower computing complexity than MP-ML, especially in the case of a complex multipath scenario. The MP-ML method is more precise than MP-MUSIC, especially in the case of positioning with limited snapshots. An Active Set Algorithm (ASA) for the MP-MUSIC and an iterative algorithm for the MP-ML are developed to reduce the computational complexity of the methods further. Numerical results demonstrate that the MP-MUSIC and MP-ML proposed in this paper outperform the conventional methods.
The paper is organized as follows:
Section 2 outlines the problem formulation, and an MP-DPD model is established in this section. The MP-MUSIC method, the MP-ML method and corresponding algorithms are proposed in
Section 3 and
Section 4, Numerical performance examples of these algorithms are given in
Section 5. The final conclusions are given in
Section 6. Finally, the detailed descriptions of the ASA algorithm, the iterative algorithm for MP-ML method and the derivation of the CRLB are provided in the Appendix.
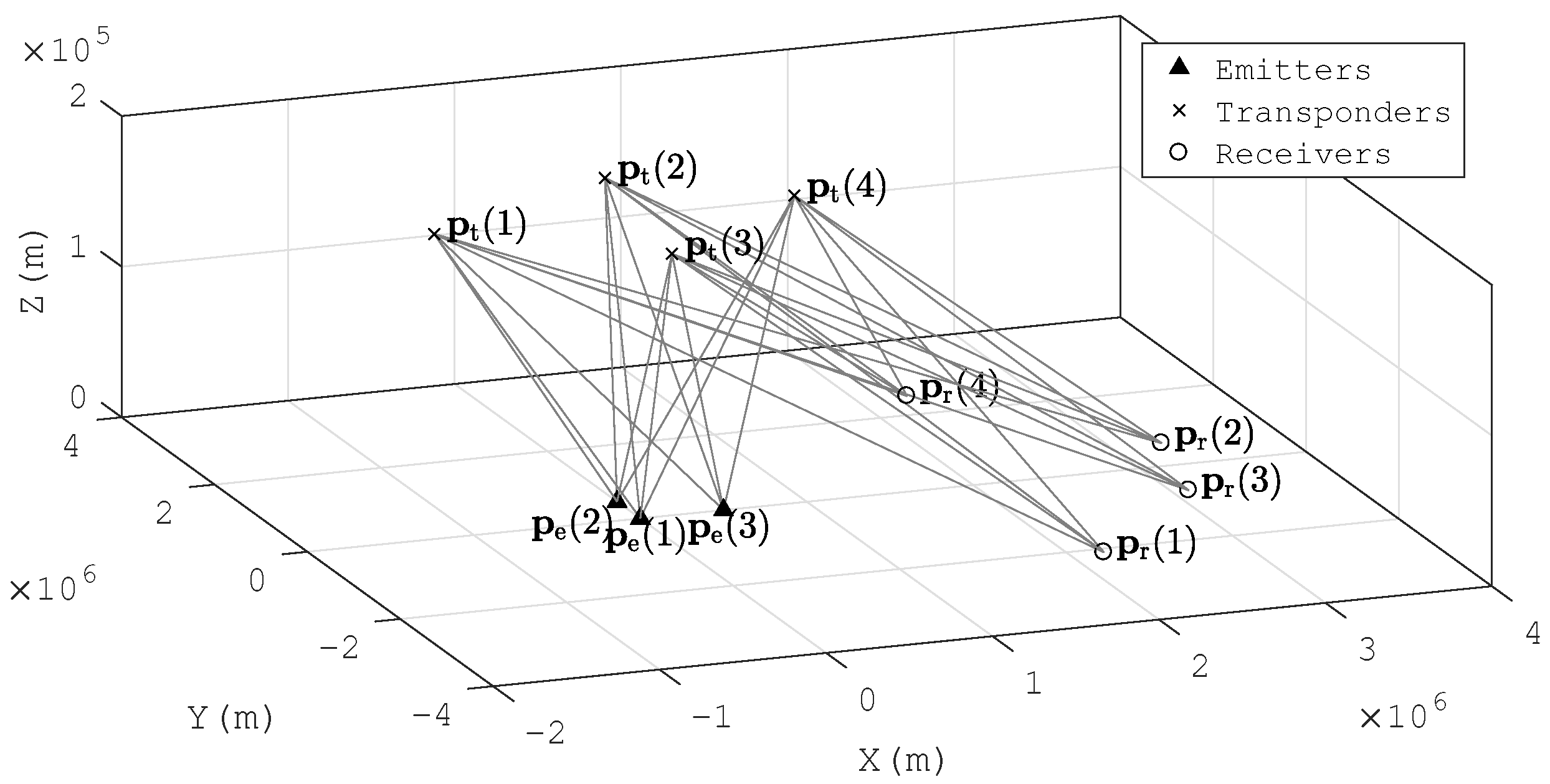
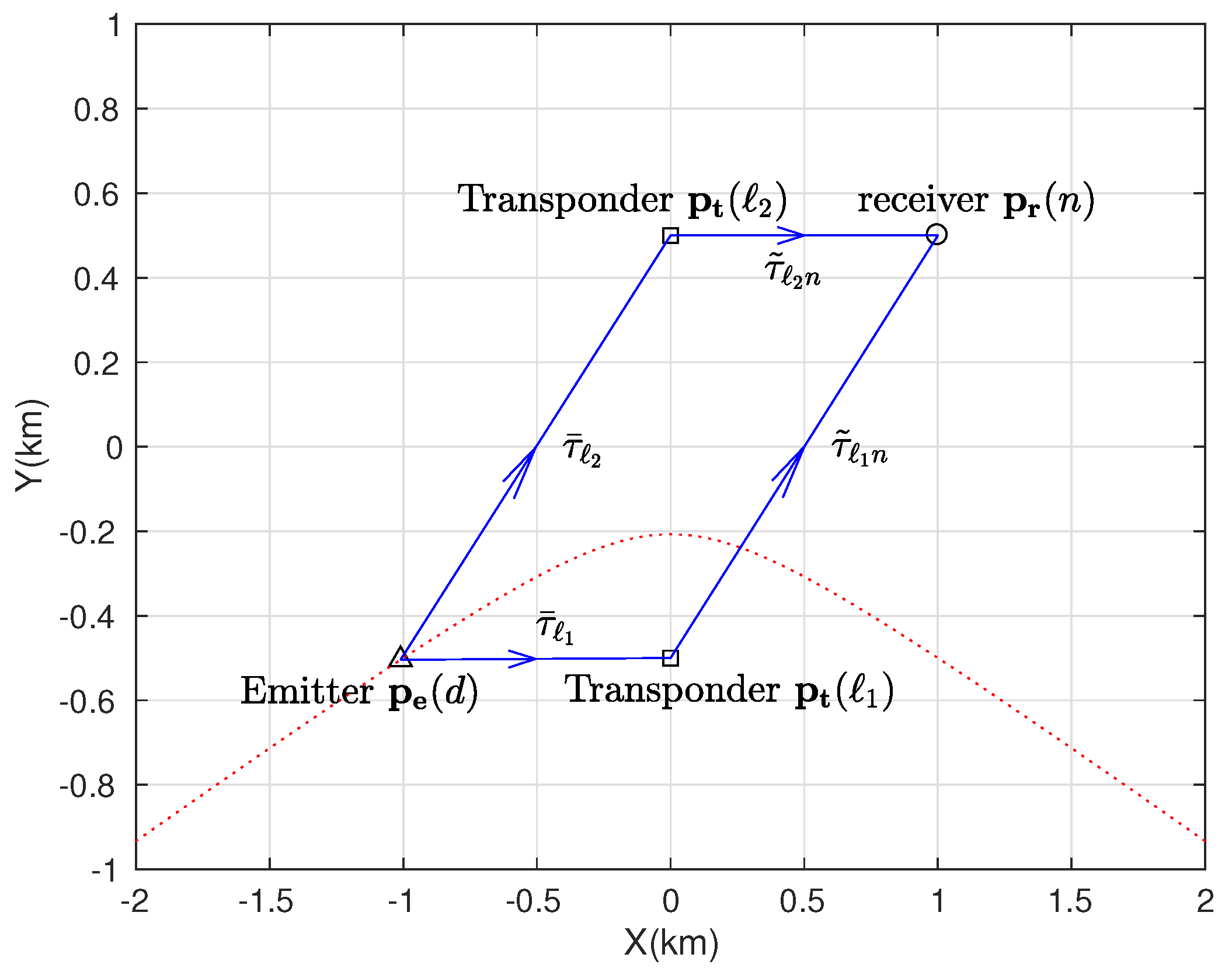
2. Problem Formulation
Consider that there are
D emitters located at
and
L passive transponders placed at
. The signals transmitted by the emitters are reflected by the transponders and intercepted by
N receiving arrays. Each array includes
M antennas. The centers of the arrays are located at
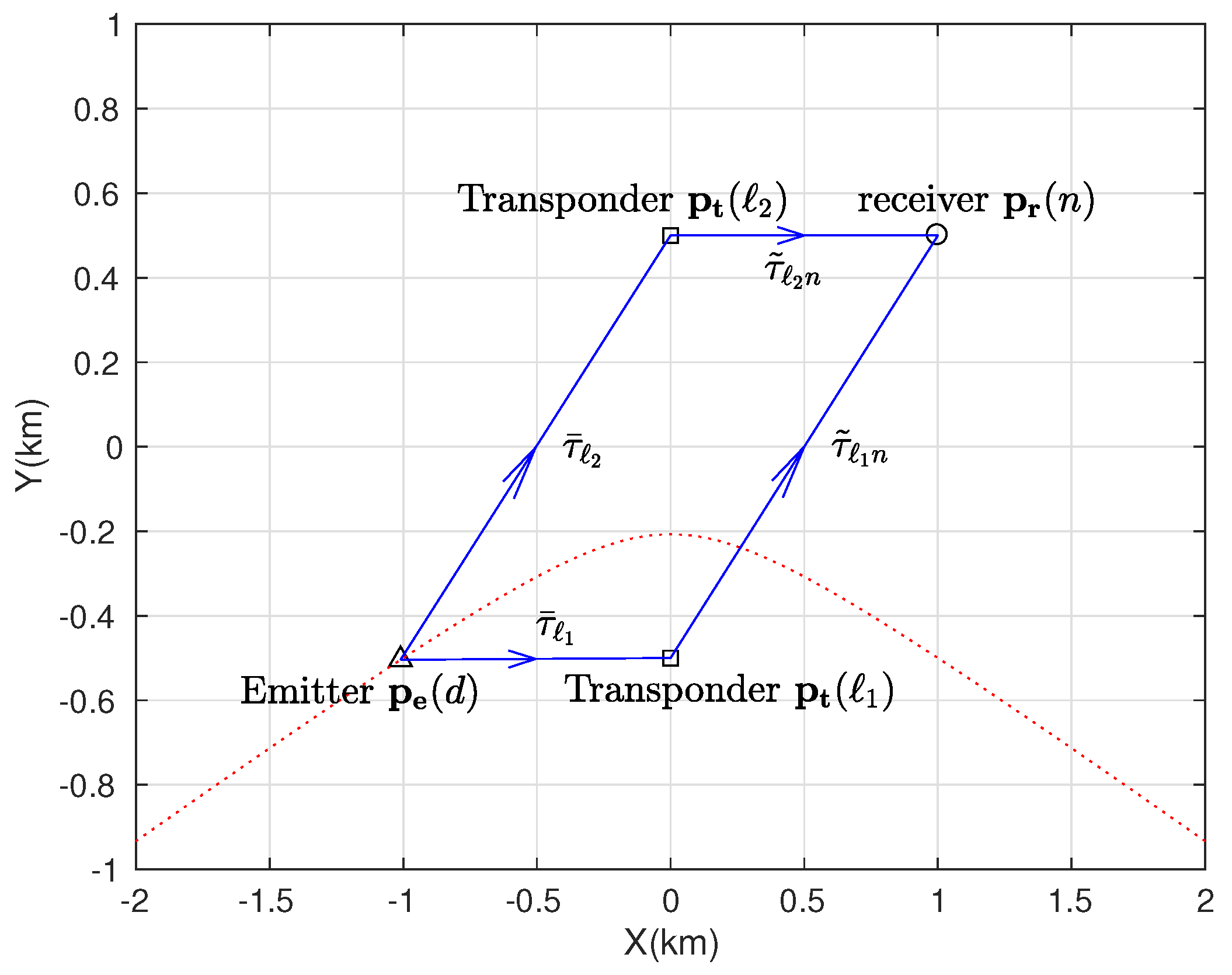
. It is assumed that the locations of the transponders and the receiving arrays are known a priori and that the signal waveforms are unknown. The scenario is depicted in
Figure 1.
Denote the signal propagation delay between the
d-th emitter and the
ℓ-th transponder by
. Denote:
where
is the propagation delay between the
ℓ-th transponder and the
m-th antenna in the
n-th receiving array.
is an
column vector, which represents the propagation delays from the
ℓ-th transponder to the
n-th receiving array.
is known in advance, and it is independent of the emitter positions.
The path attenuation from the
d-th emitter to the
n-th receiving array, which is reflected by the
ℓ-th transponder, is denoted by
. The path attenuation coefficients are assumed as non-negative real numbers, and the rationality of the assumption will be discussed in detail in
Section 3.1.2. We assume that the antennas in a receiving array are uniform, and all antennas in an array share the same path attenuation coefficient.
The time-domain model of the signals that are received by the
n-th receiving array is:
where
is an
column vector, which represents
M snapshots at time
t of the
n-th receiving array.
is an
column vector, which represents
M snapshots of the
d-th source signal at time vector
.
is an
noise vector at time
t.
, and
is the unknown transmit time of the emitter
d. We assume that the path attenuation,
, remains constant during the observation time interval. This paper mainly focuses on the positioning of deterministic, but unknown signals. It is assumed that source signals are independent of one another, and there is no further requirement for the code or waveform of the signals. The frequency-domain model for the
k-th DFT coefficients is given by:
where:
where
is the
k-th Fourier coefficient of the
d-th source signal
.
and
are
vectors of the
k-th Fourier coefficients of
and
.
is an
vector, which denotes the generalized array response of the
n-th receiver at frequency
. Make (
3) into matrix form:
where:
where ⊗ is the Kronecker product and
is an identify matrix with a size of
.
Denote the second moments of variables by:
where
is an identity matrix with a size of
.
is a covariance matrix of received signals at frequency
.
is the noise standard deviation. The observed signal of each antenna
is partitioned into
J sections, and each section is Fourier transformed. The
k-th Fourier coefficient of the
j-th section is denoted by
. The covariance matrix at frequency
is estimated by:
The relationship between the received signals and emitter positions has been established in (
5), and it is named the MP-DPD model. The MP-DPD model optimizes the emitter positions directly to achieve a more accurate estimation. Two DPD methods are proposed under the MP-DPD framework:
MP-MUSIC method;
MP-ML method.
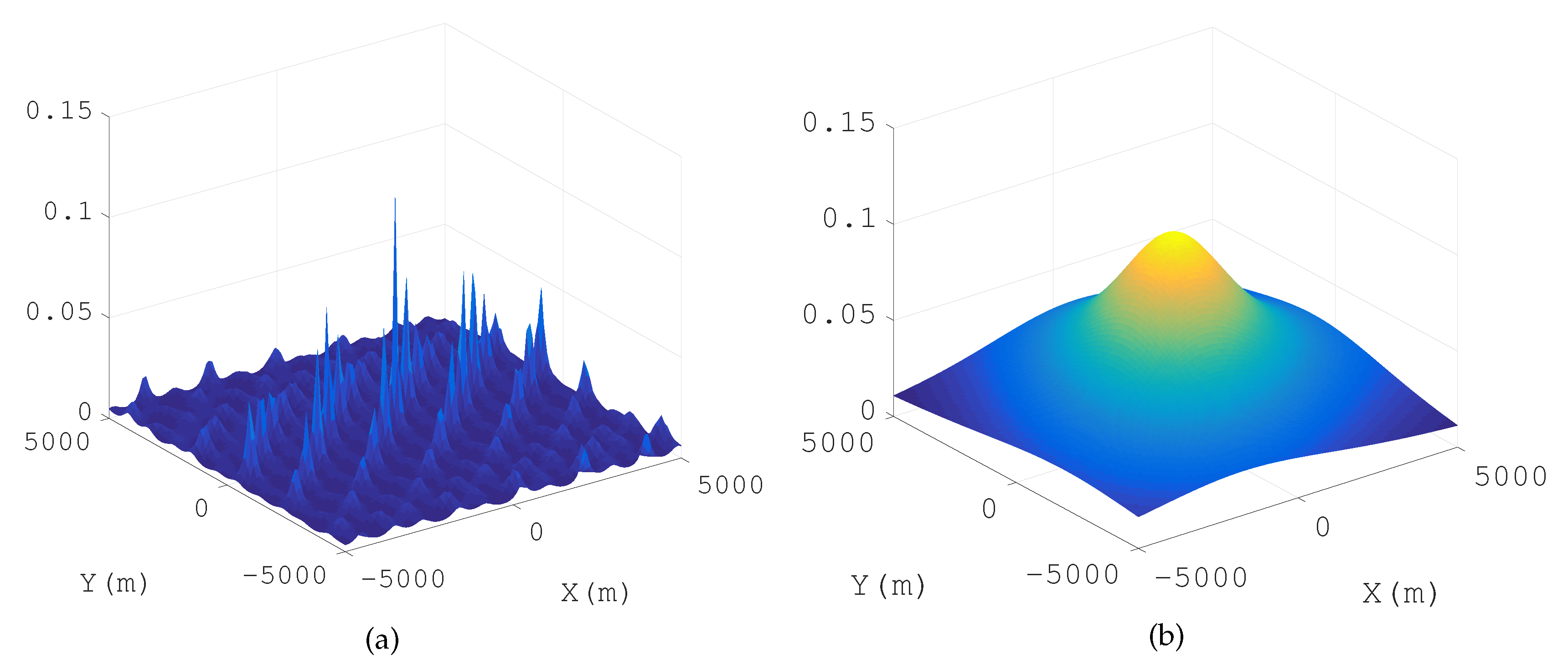
The array manifold projection onto the noise subspace is adopted as the cost function in the MP-MUSIC method, and the likelihood function of the received signals is adopted in the MP-ML method. If the number of snapshots is sufficient, MP-MUSIC consumes less time than MP-ML without degrading the performance. Besides, if the number of snapshots is not enough, MP-ML obtains more precise position estimations than MP-MUSIC.
4. MP-ML Method
The MP-ML method maximizes the conditional likelihood function of the received signals. The noise is assumed as Additive White Gaussian Noise (AWGN) with a known standard deviation ,
4.1. Mathematical Model of MP-ML
The likelihood function of the received signals is:
where
is the observed data,
is the covariance matrix of noises, which is defined in (6), and the unknown parameter vector
consists of:
where
and
have been defined in (
5). The log-likelihood function of (
37) is:
Remove the constant items, and get the modified cost function of MP-ML:
The searching space dimension of (
40) is
, and it is necessary to reduce the searching space dimension. For fixed attenuations
and emitter position combination
in (
40), the optimal estimation of the source signals at frequency
is:
where
is the Moore–Penrose inverse of
. Substitute (
41) into (
40),
where
,
,
is a column vector of
D ones.
is the projection matrix of
. Expand (
42):
and move the constant items
. Applying the properties of the projection matrix
and
, we get the modified programming of MP-ML:
There are two differences between our model and Bar-Shalom Ofer’s model in [
28]. The first one is that only a single emitter and a single receiver were modeled in their work, but multiple emitters and multiple receivers are taken into consideration in our work. The second one is that there are complex path attenuations in [
28], but real non-negative path attenuations in our model.
The cost function in [
28] was modeled as:
where
,
.
Section 3.1.1 has discussed that
may be singular, and
may be singular, as well. When
is singular, there is an
that satisfies
, and the cost function
reaches the peak. However, the candidate emitter position is not the true emitter position. If
is near singular,
is near singular, as well. The numerator and denominator of the cost function
both tend to zero, and the value of the cost function turns out to be unstable. The noise level will seriously affect the value of the cost function in this case, and the model cannot find the emitter accurately.
The searching space dimension of (
44) has been reduced to
, but it is still difficult to solve such a high dimensional non-linear programming. We propose an iterative algorithm in this paper to get the estimation of path attenuations to reduce the time consumption of the MP-ML.
4.2. Remove Imaginary Items in the Programming
Substitute the constraints into the objective function of (
44),
where
,
.
Henk A. L. Kiers studied a similar convex optimization problem in [
41]. Ofer Bar-Shalom and Anthony J. Weiss study the complexity form of the optimization in [
28] and its application in [
29]. The programming in our work has the complex
and
, but the decision making variables
are real non-negative values. We modify the iterative process in [
28,
41] to satisfy the real non-negative constraints in our work.
The cost function (
46) can be rewritten by:
where
is the trace operator of a matrix. Since
and
are Hermitian metrics,
satisfy:
where
,
, and
is the SVD decomposition of
. The complex matrices
and
are replaced by the matrices
and
with real number elements:
The complex non-linear programming with real constraints (
46) is simplified to be a real non-linear programming (49).
4.3. An Iterative Algorithm for Solving MP-ML
We introduce a theorem firstly and then give an iterative algorithm for solving the programming (49).
Theorem 2. is a feasible solution of (49)
, and a better solution of (49)
is obtained by solving the following programming:where: is an identify matrix with a size of and is an identify matrix with a size of . is the Singular Value Decomposition (SVD) of the following item: The proof of Theorem 2 is given in
Appendix B. The programming (
50) is a linear least squares with bound constraints, and the Trust-Region-Reflective (TRR) algorithm is adopted to solve the programming. The detail of TRR is described in [
42,
43,
44].
We get an iterative method to obtain a better solution than the previous step. Denote the initial estimation of the unknown channel attenuations by
. The solution of (
50) gives a better estimation of the unknown parameter vector due to the inequality of (
51). Furthermore, we get a better estimation
, so that
. Thus,
. The detail of the iterative procedure is shown in the Algorithm 2 in the supplementary file.
4.4. Getting the Initial Value
The performance of the iterative algorithm is determined by the initial value . The path attenuations from the MP-MUSIC algorithm are used as the initial value of the MP-ML.
The initial path attenuations of the emitter d are denoted by , and they are estimated by the MP-MUSIC in Algorithm 1.
For a fixed emitter position combination , evaluate the MP-MUSIC algorithm to get the initial path attenuations of the position , .
Reshape
to get the initial attenuations vector:
where:
and
is estimated from MP-MUSIC.
4.5. MP-ML Algorithm
Algorithm 2 in the Supplementary File optimizes the parameters for a fixed emitter positions combination . The searching dimension is reduced to further. It is possible to solve a dimensional nonlinear programming. The MP-ML algorithm is proposed in Algorithm 2
Define the Region of Interest (RoI) by , and apply the MP-MUSIC algorithm described in Algorithm 1 to get an initial solution and the corresponding path attenuations . Adopt Algorithm 2 in the Supplementary File to get the optimal estimations of attenuations and the cost function of emitter positions . Design a suitable searching path , , such as the Gaussian method, and get the optimal emitter position estimations.
| Algorithm 2: MP-ML algorithm. |
![Sensors 18 00892 i002]() |
6. Conclusions
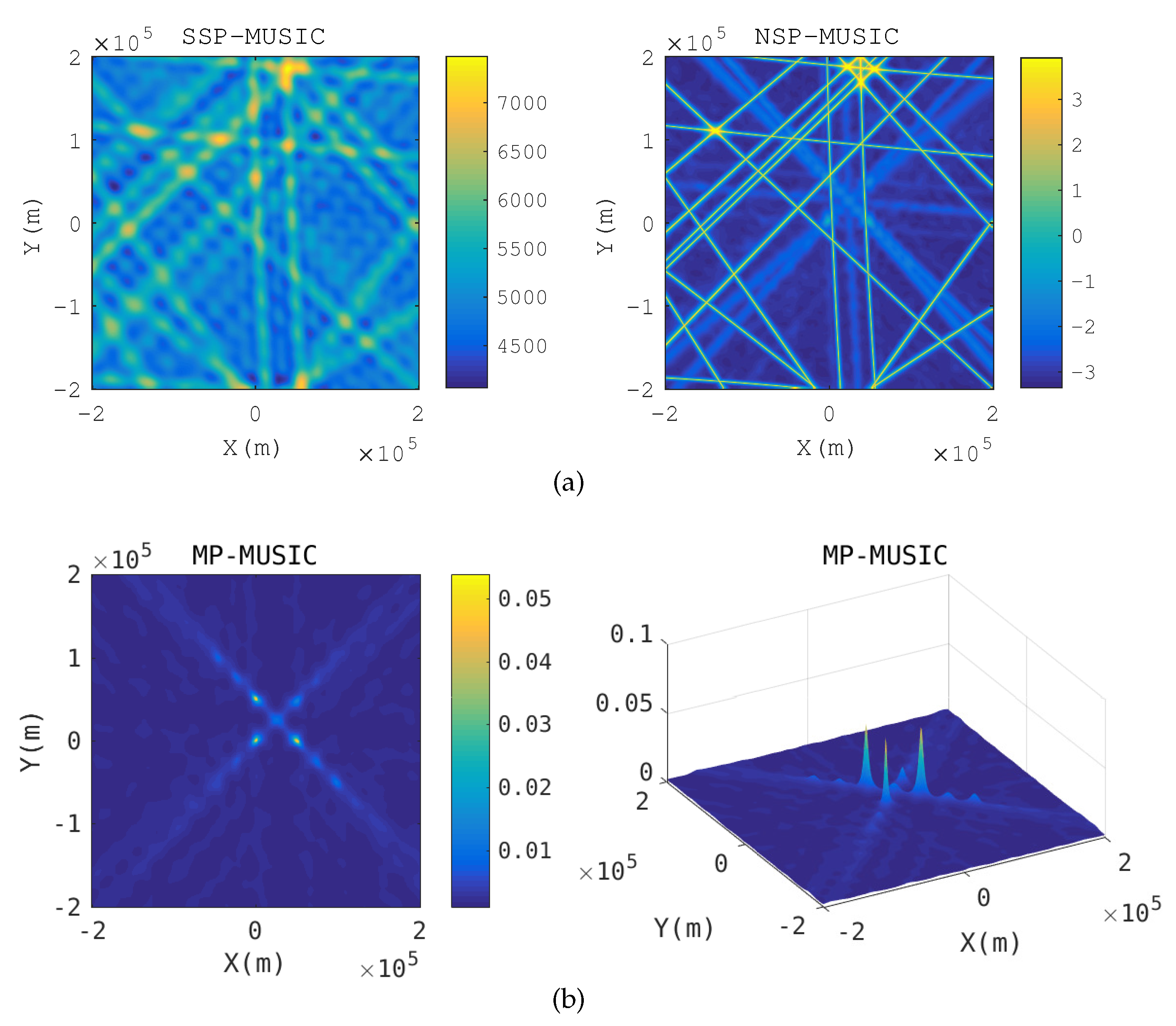
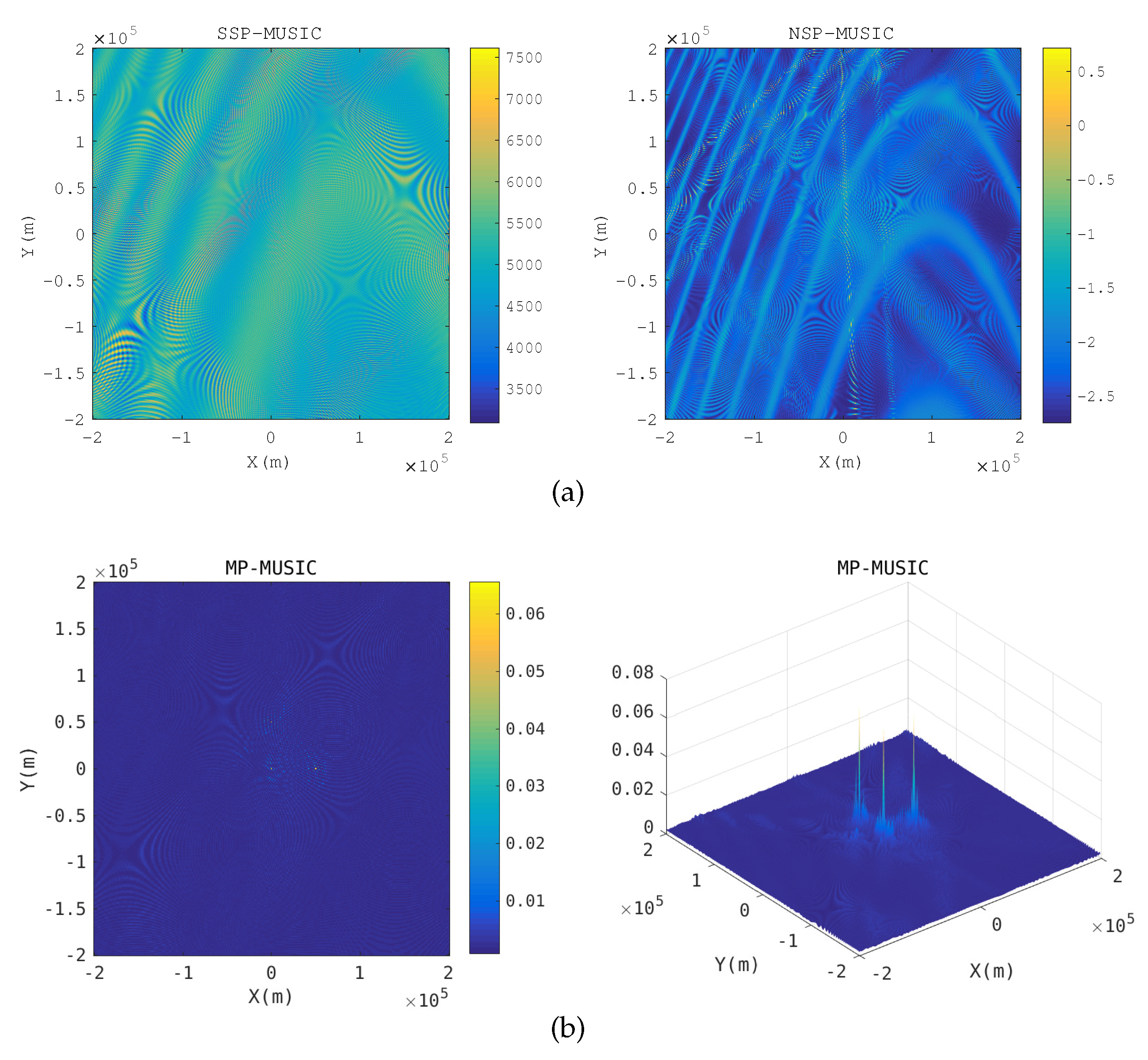
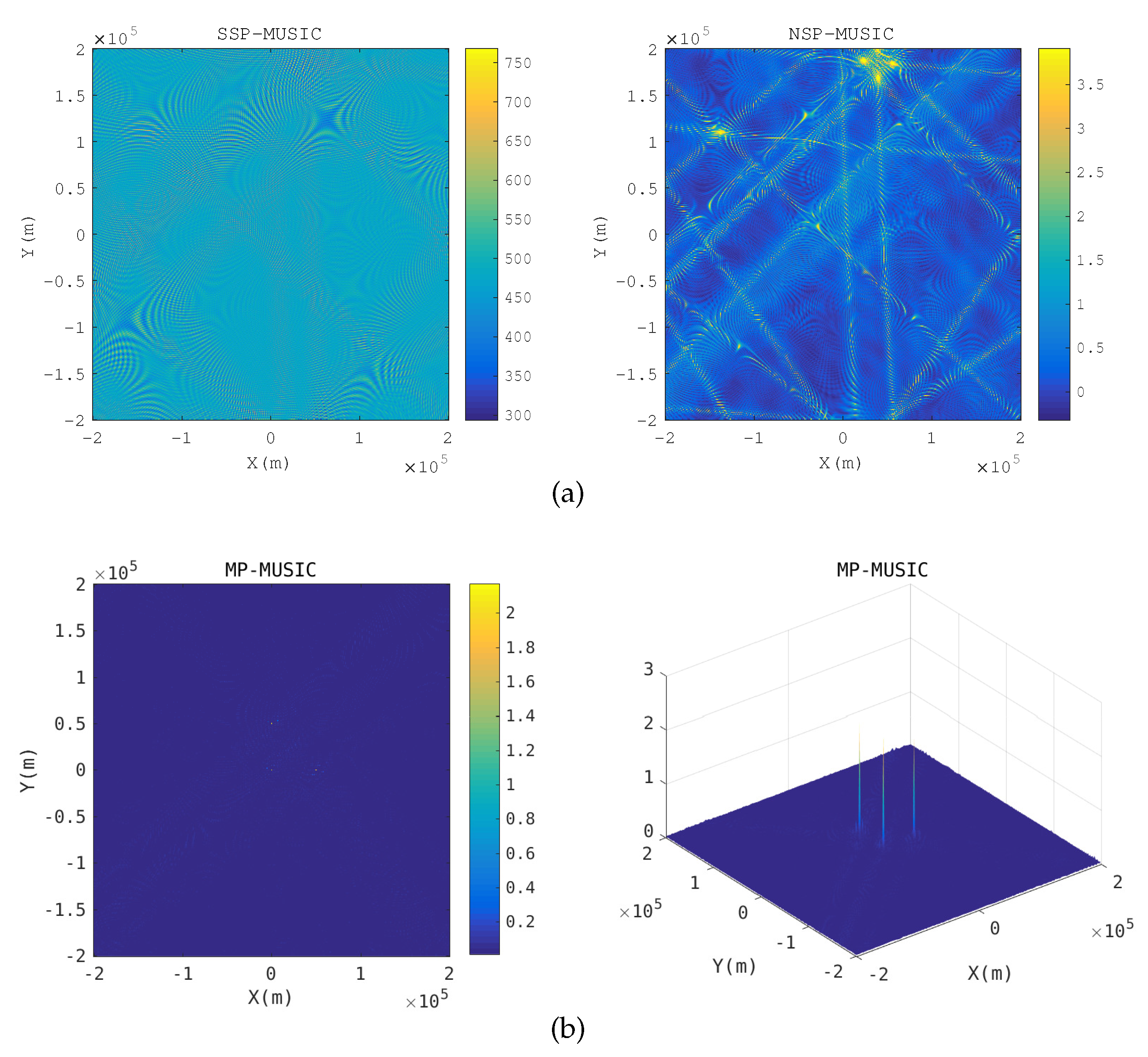
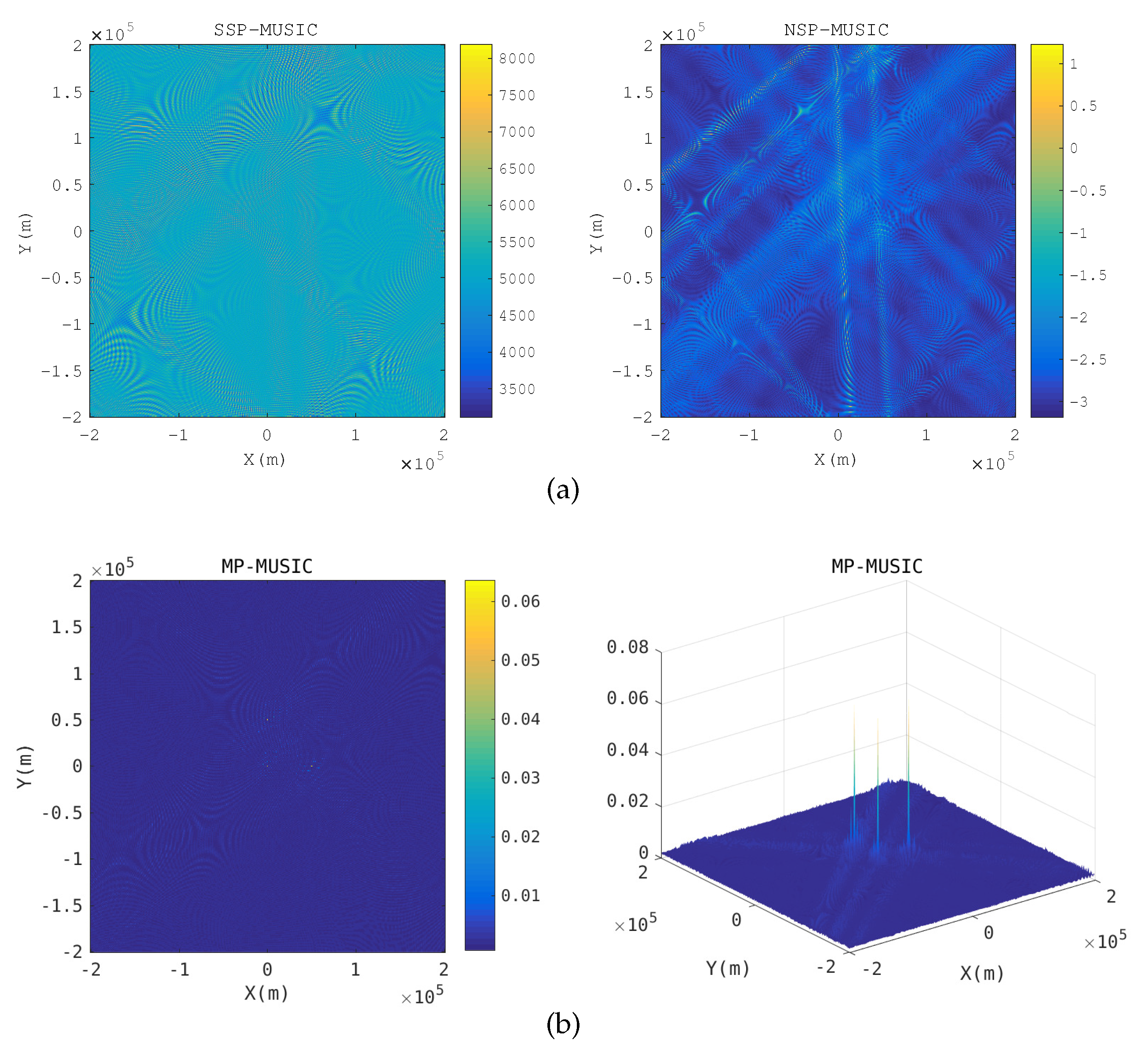
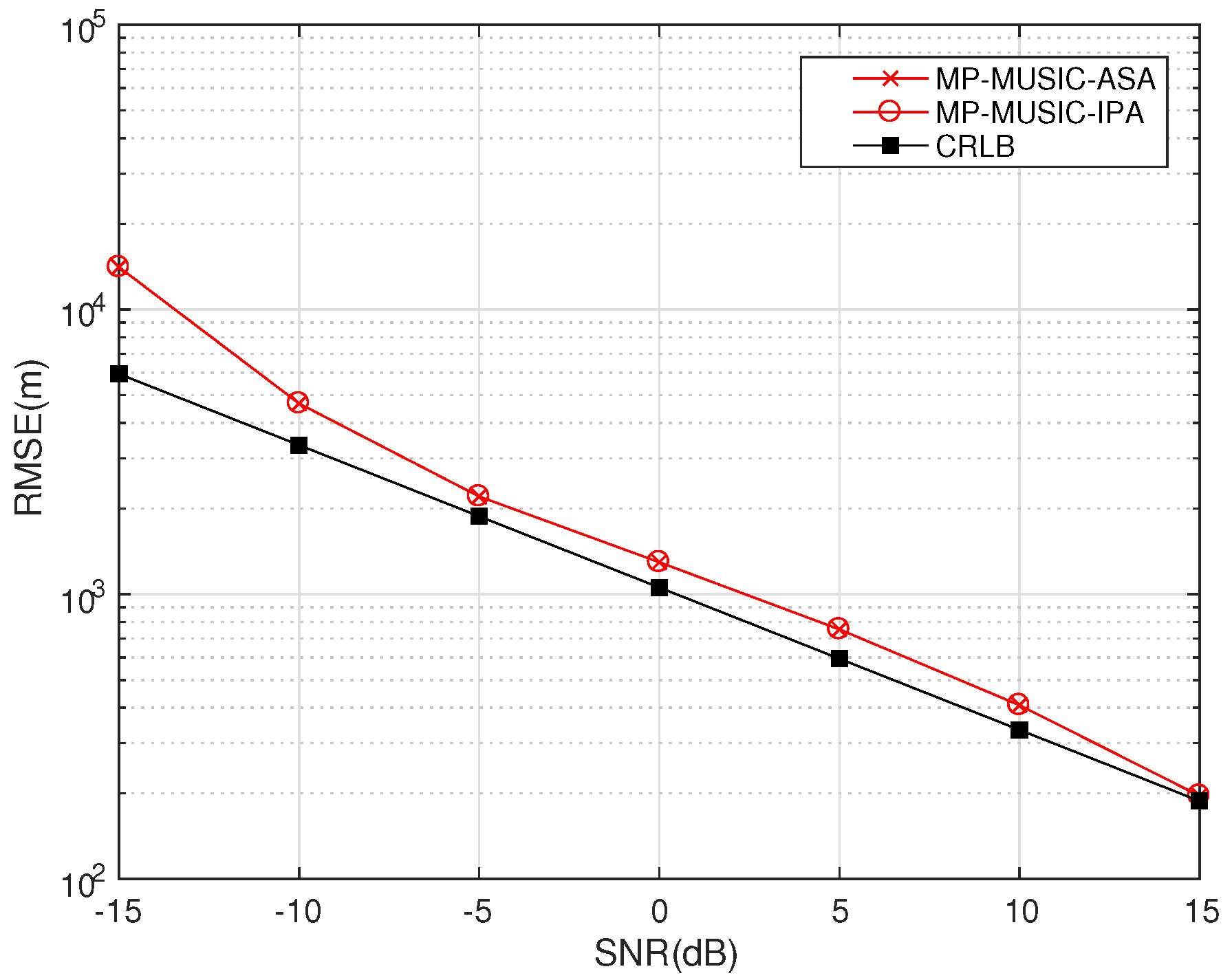
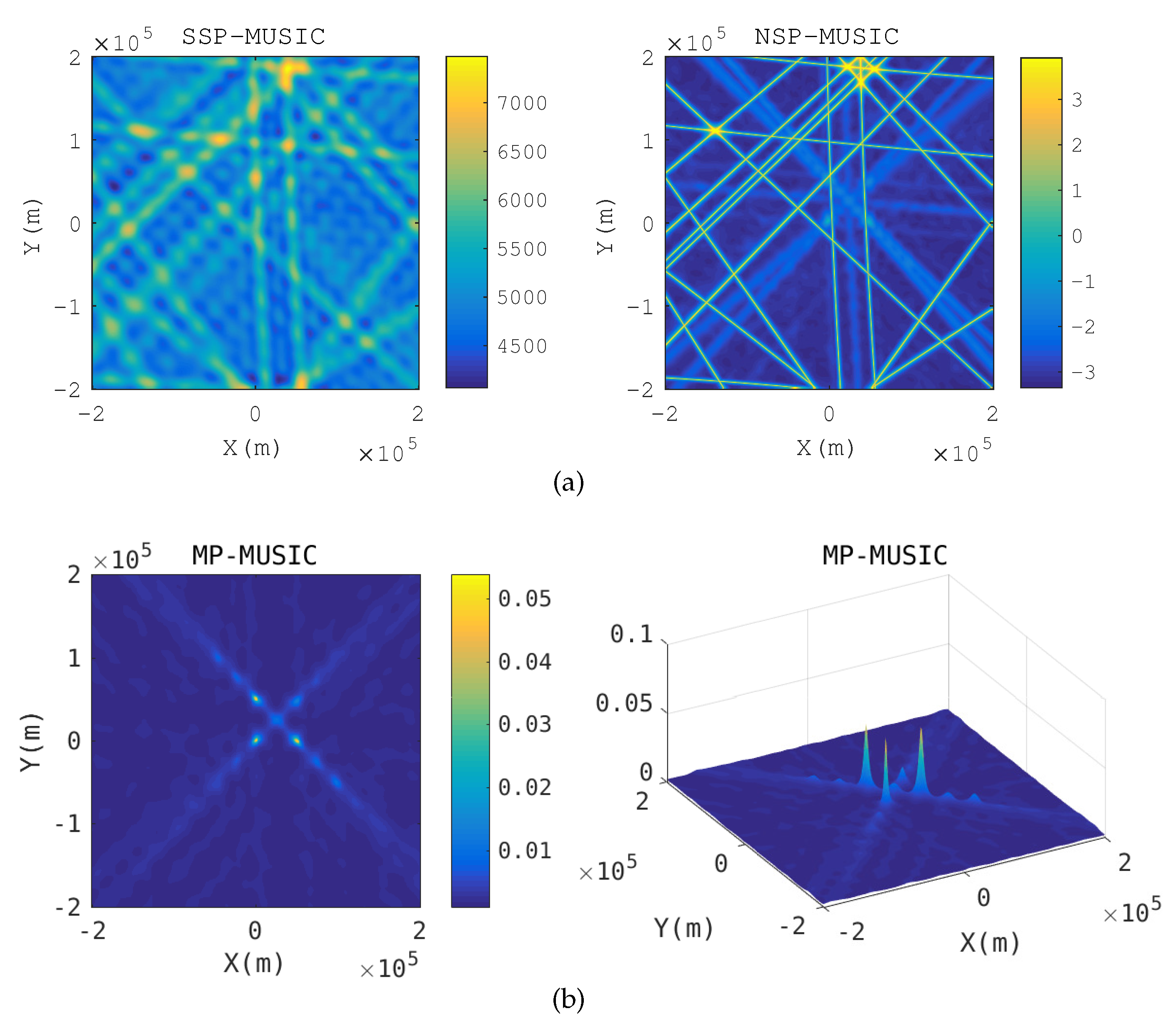
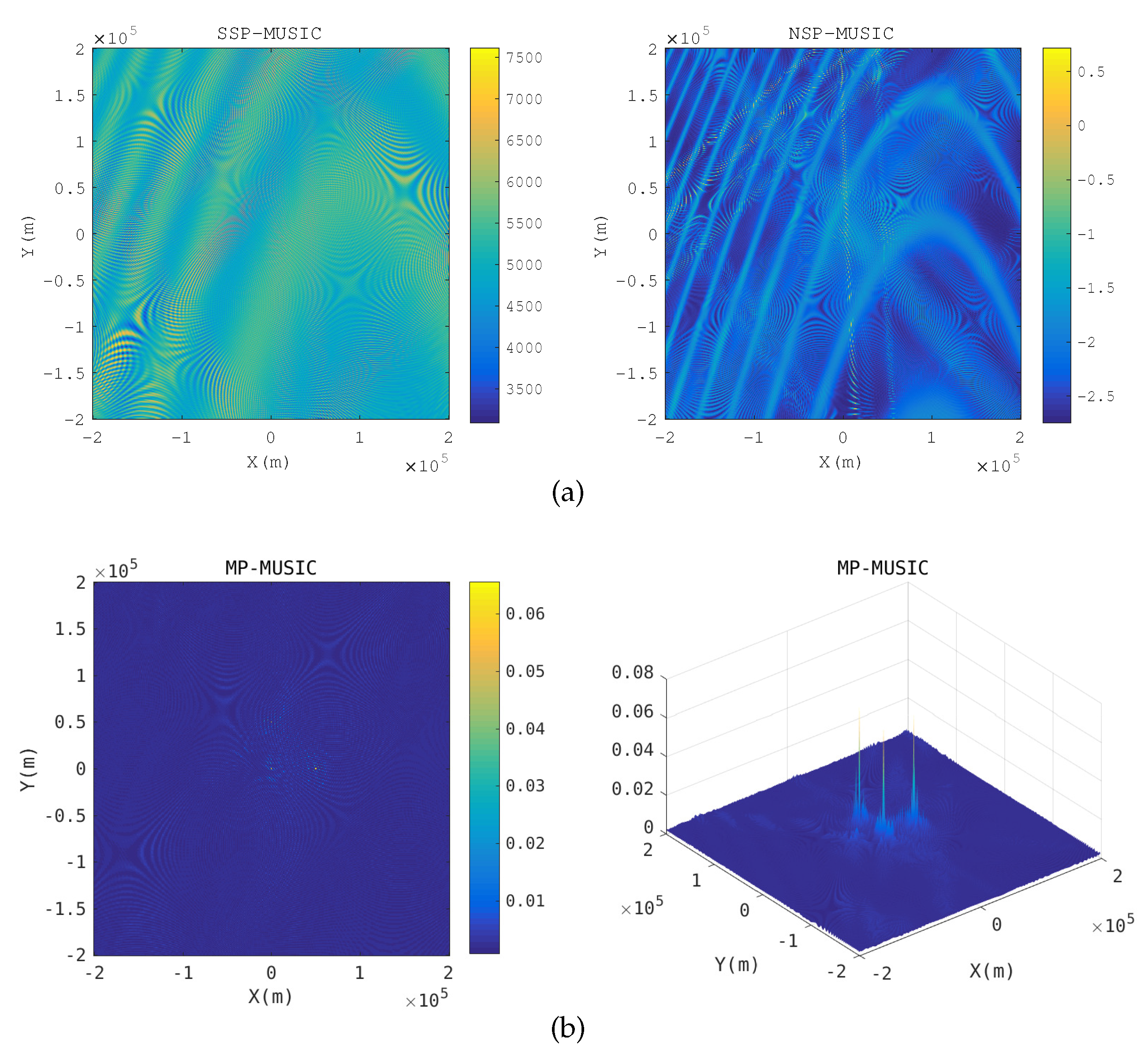
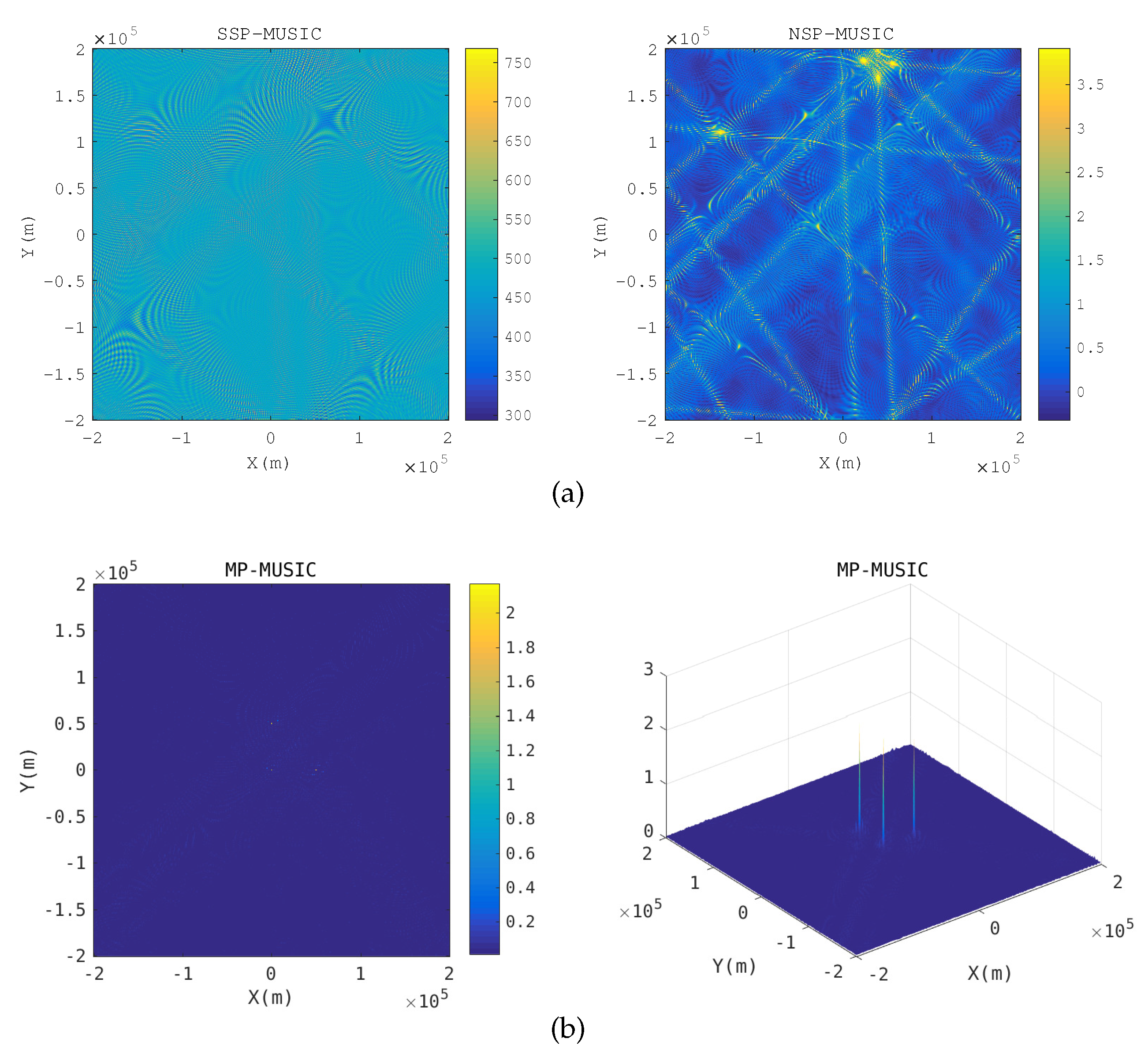
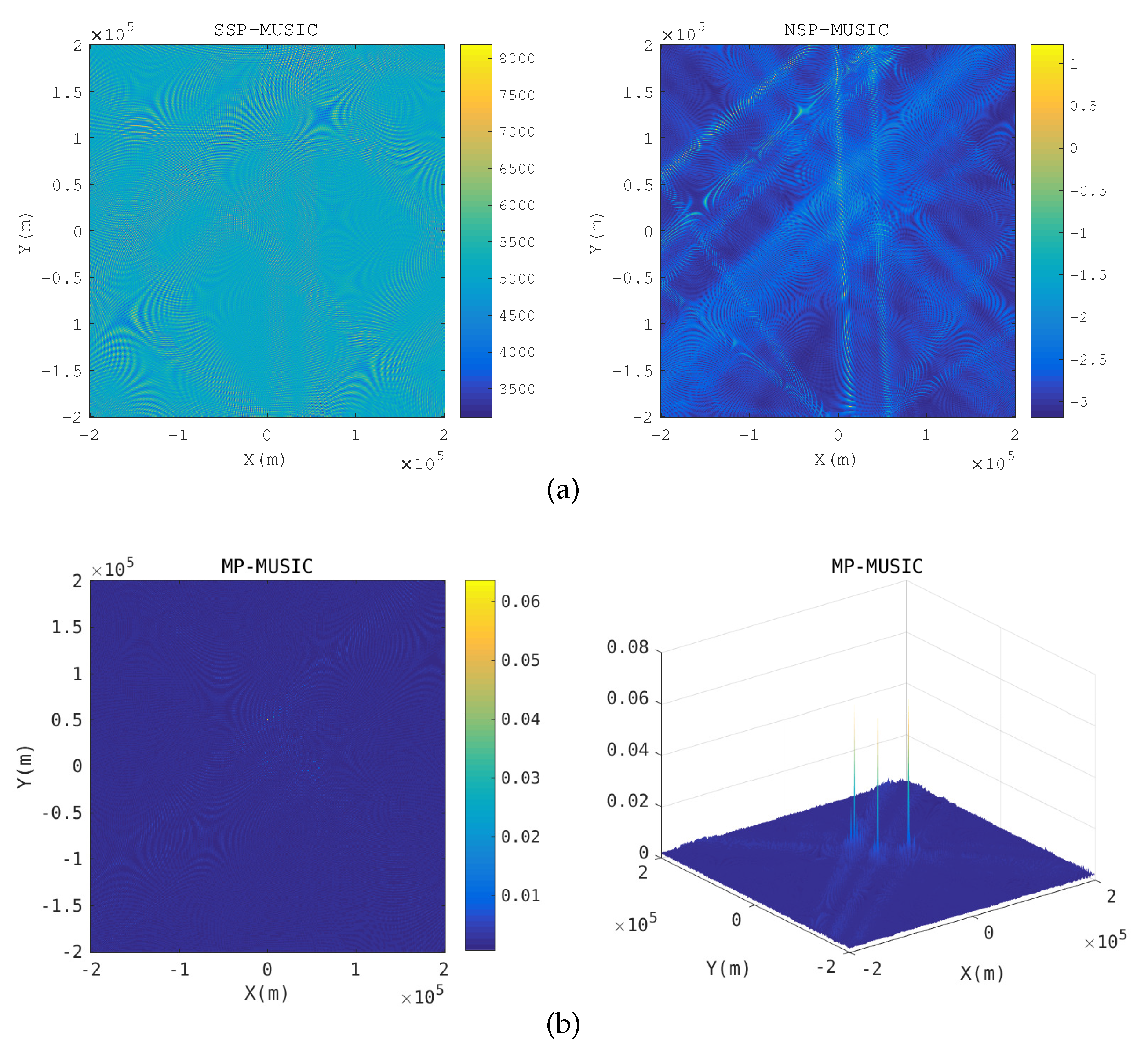
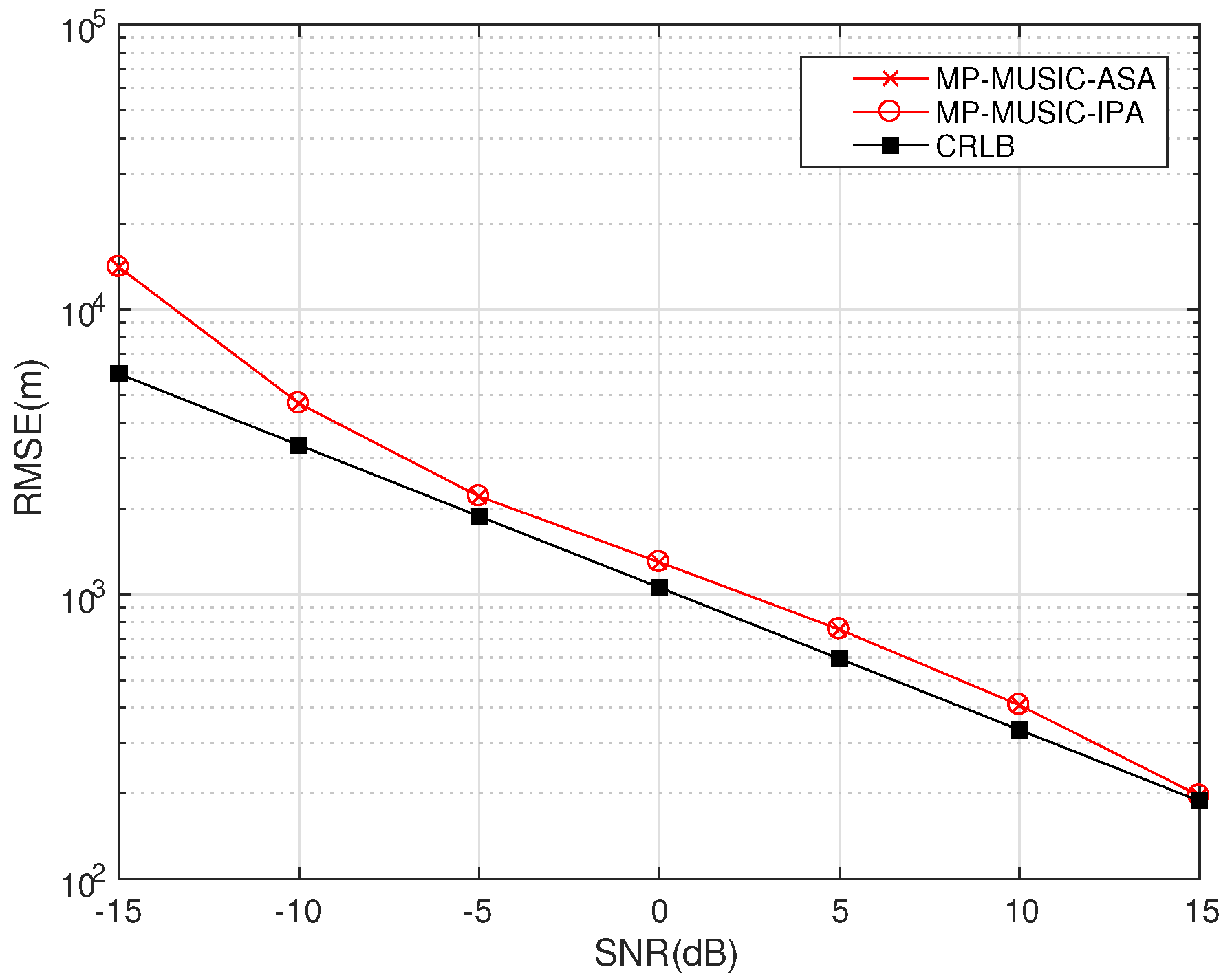
A novel geolocation architecture, termed “Multiple Transponders and Multiple Receivers for Multiple Emitters Positioning System (MTRE)” is proposed in this paper. A Direct Position Determination for Multi-path Propagation positioning (MP-DPD) model and a MUltiple SIgnal Classification algorithm for Multi-path Propagation positioning (MP-MUSIC) were proposed to position the emitters in an MTRE system. To optimize the cost function of the MP-MUSIC efficiently, we proved that the cost function of the MP-MUSIC was a linear and non-negative constrained quadratic convex programming. A algorithm named Active Set Algorithm (ASA) is designed to solve the quadratic convex programming further. Numerical results show that the MP-MUSIC with ASA locates multiple emitters precisely, but the Signal Subspace Projection MUSIC algorithm (SSP-MUSIC) does not. We compared the time consumptions of the Interior Point Algorithm (IPA) and the ASA, as well. ASA consumes only 1.67% more time than IPA.
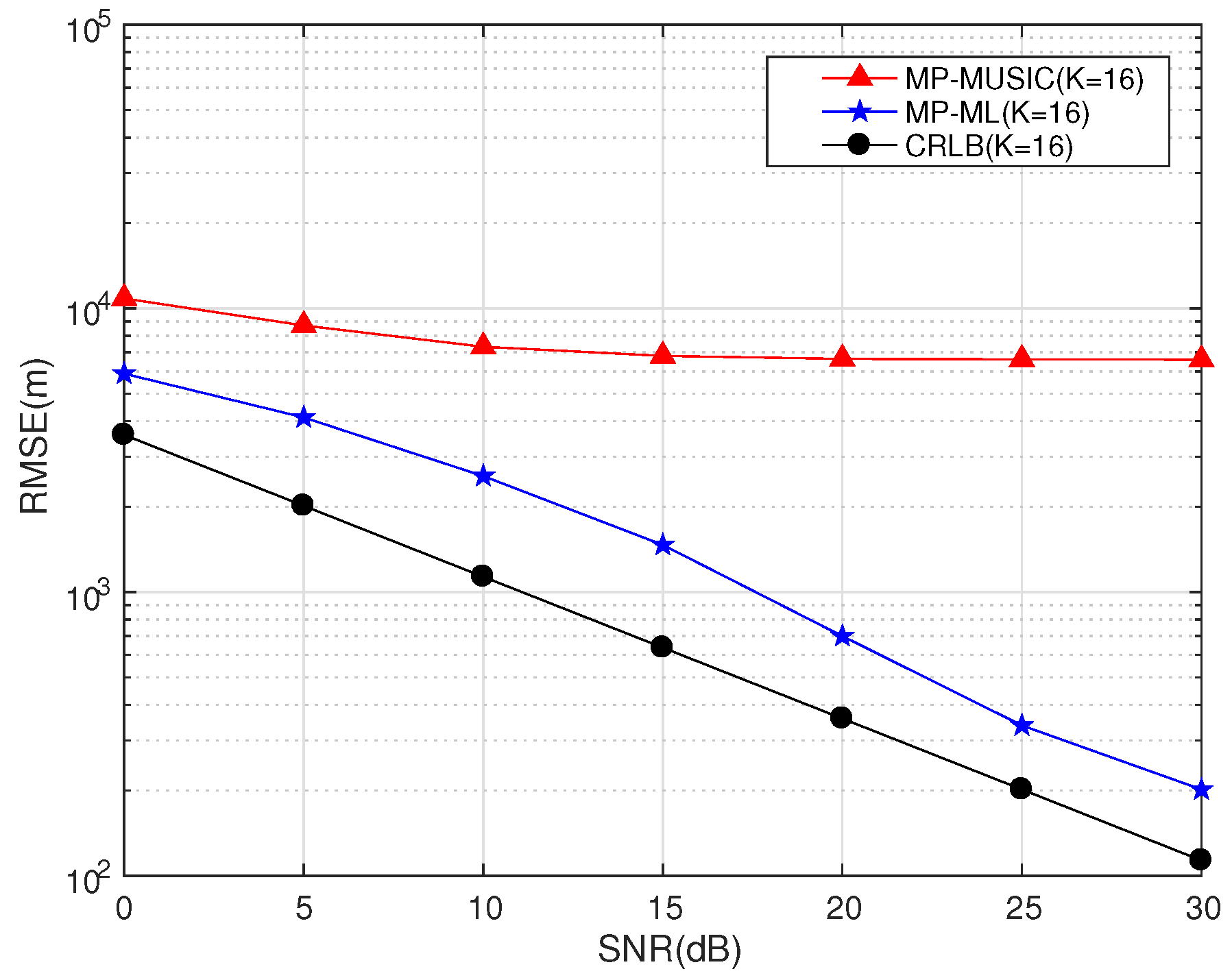
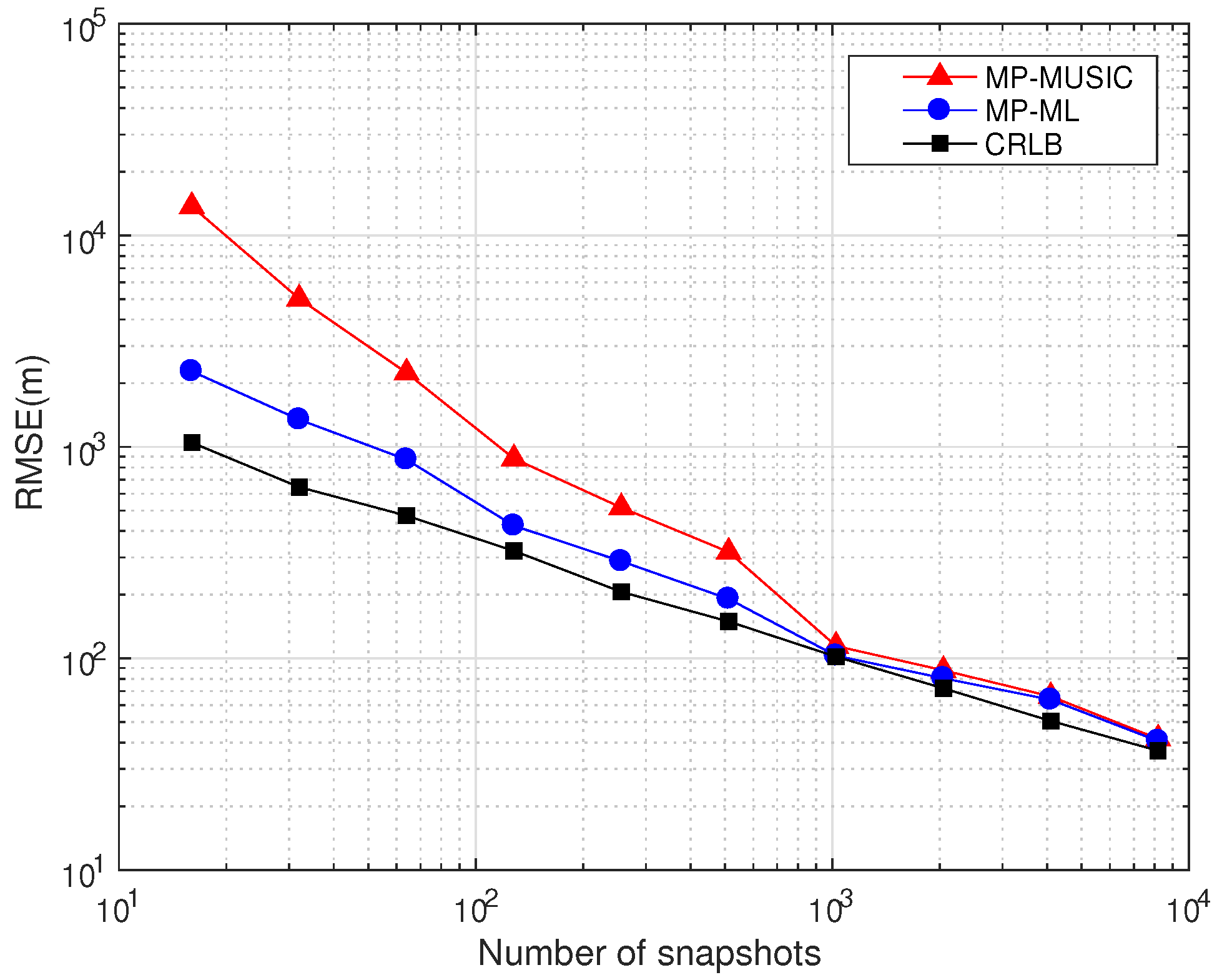
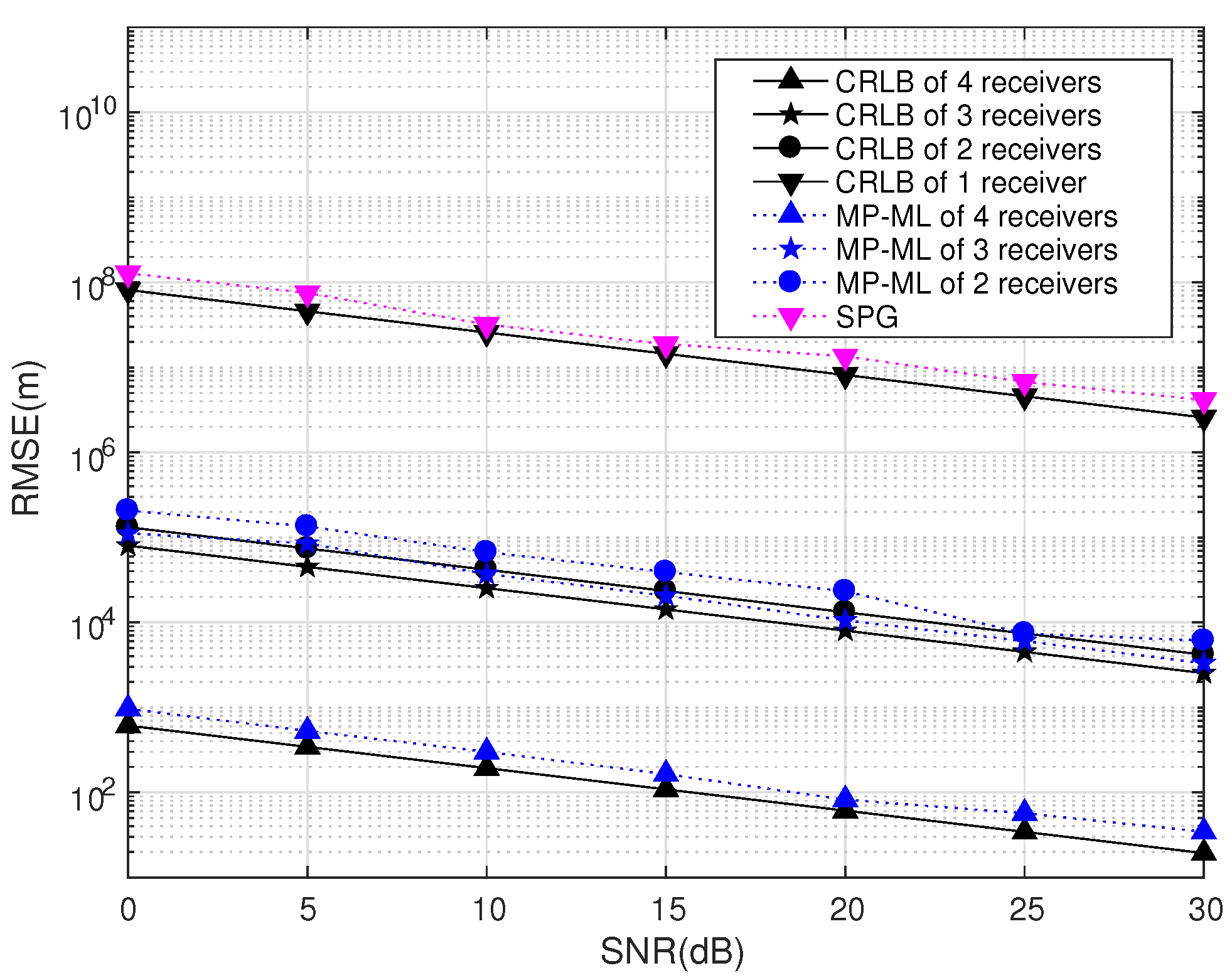
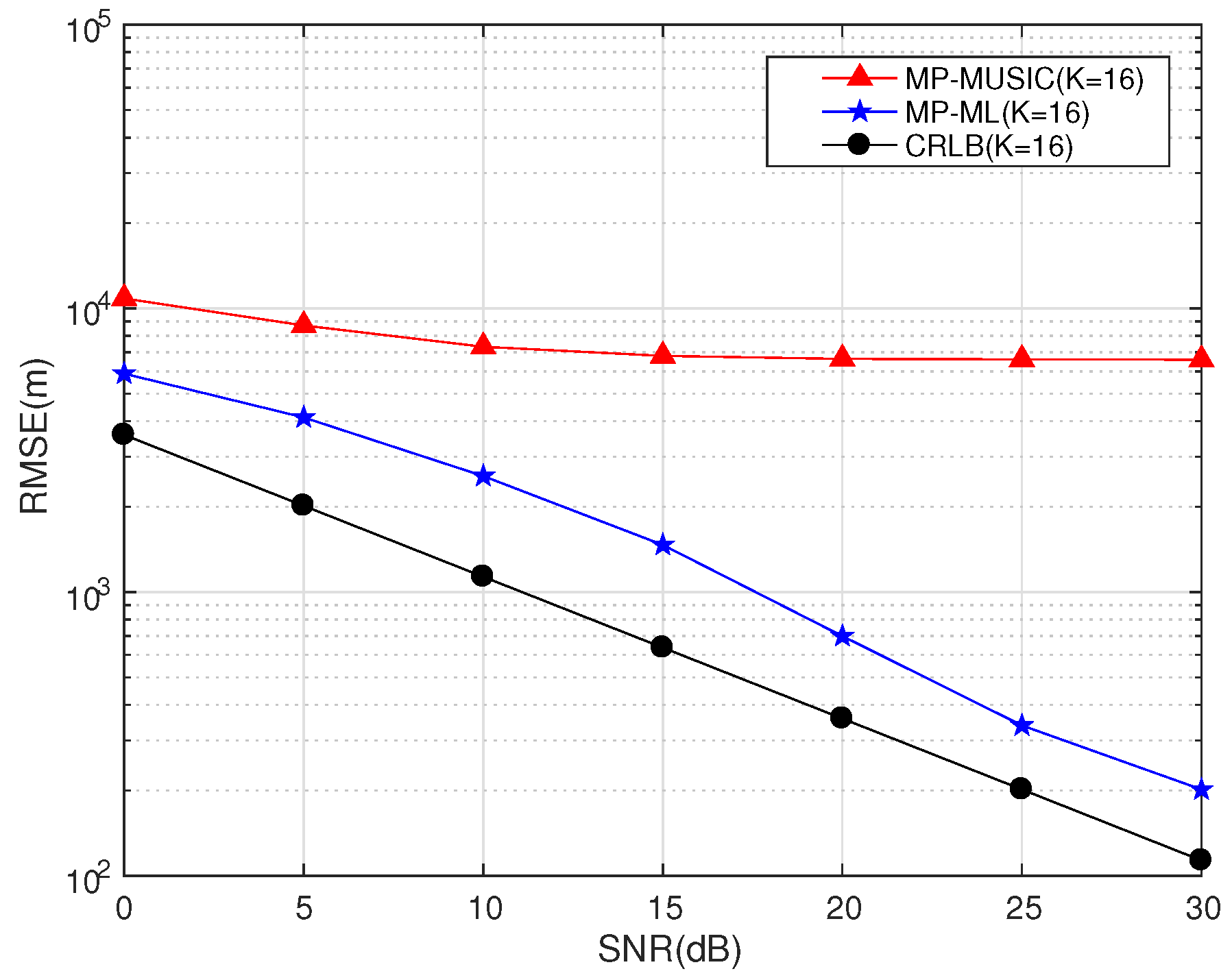
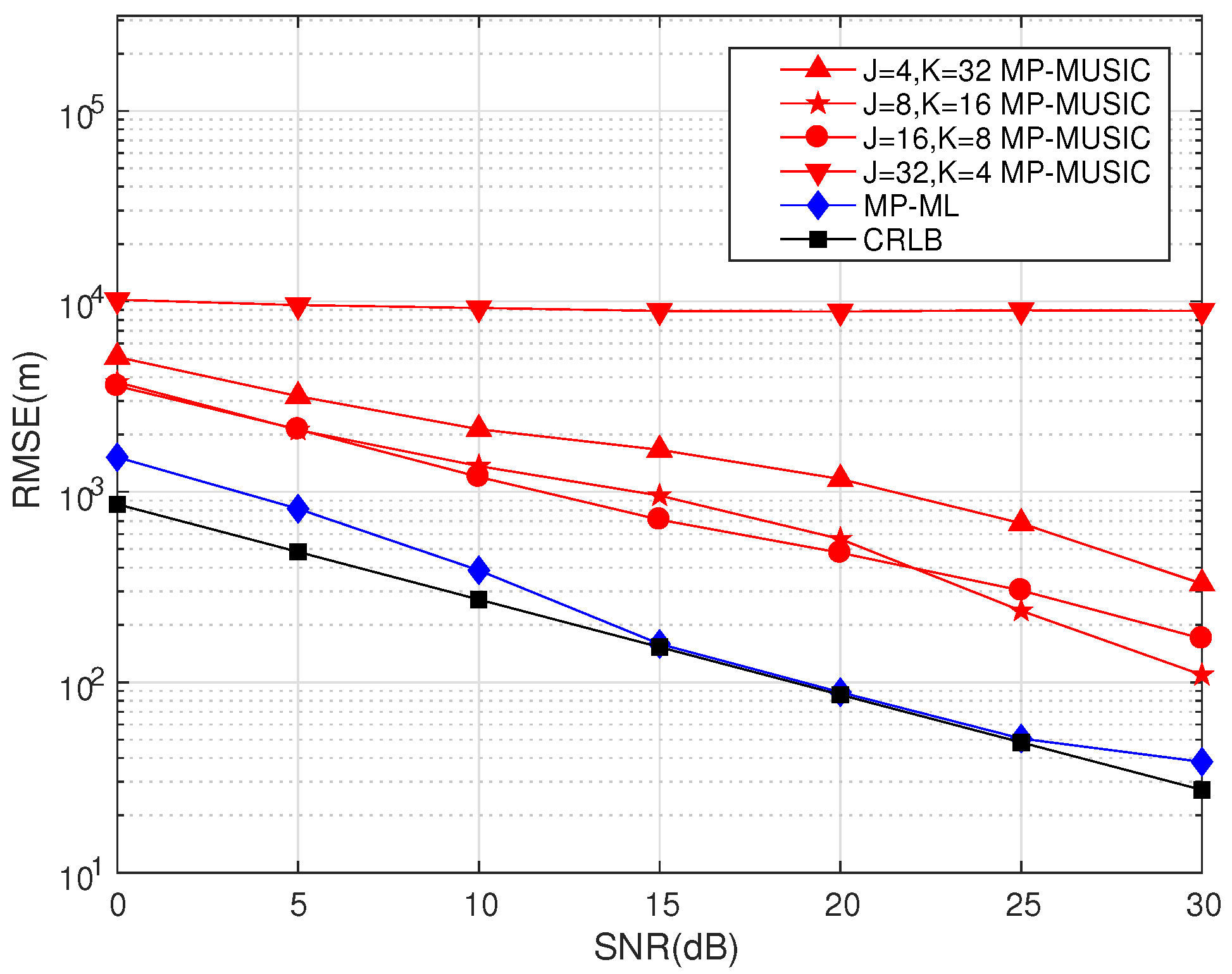
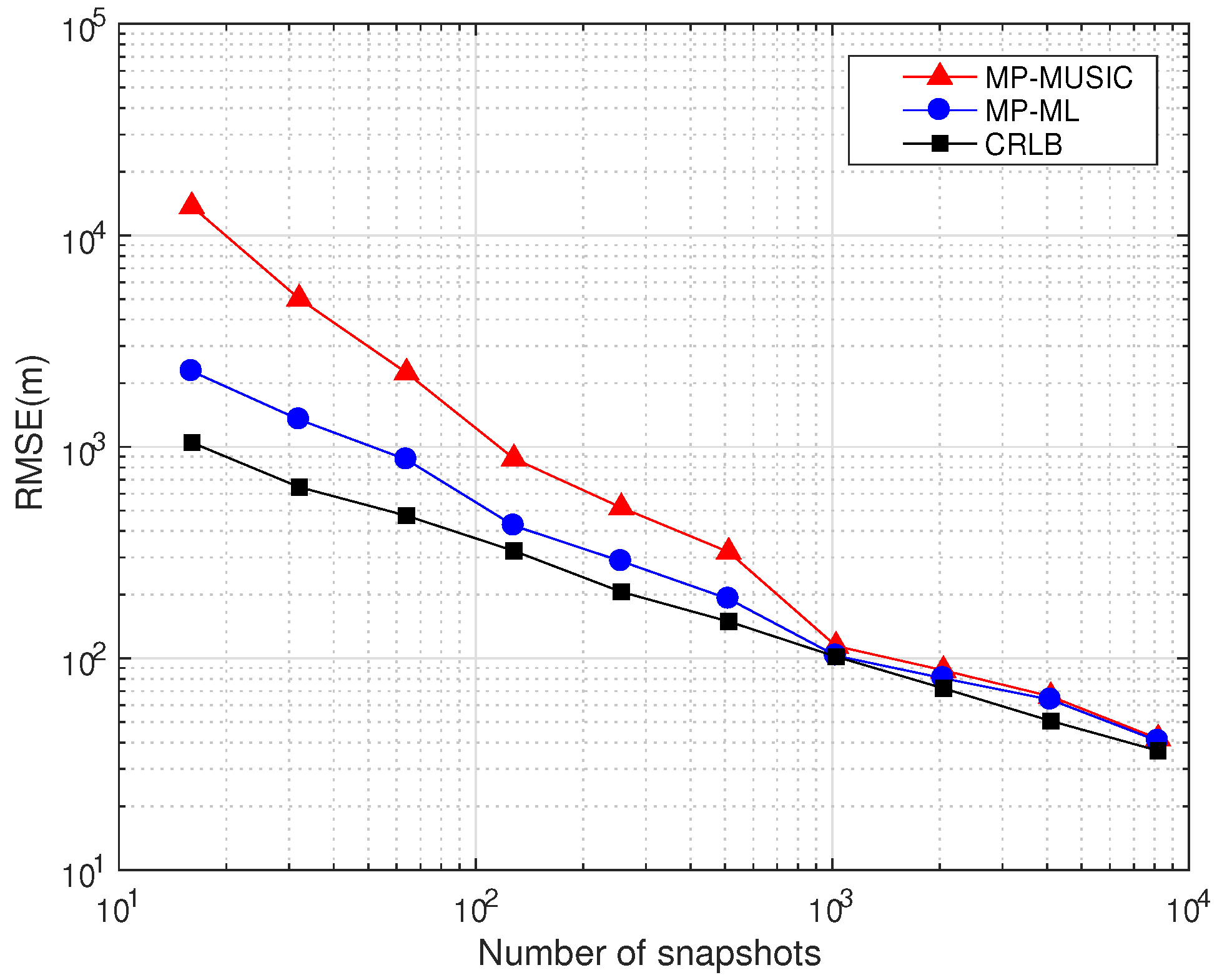
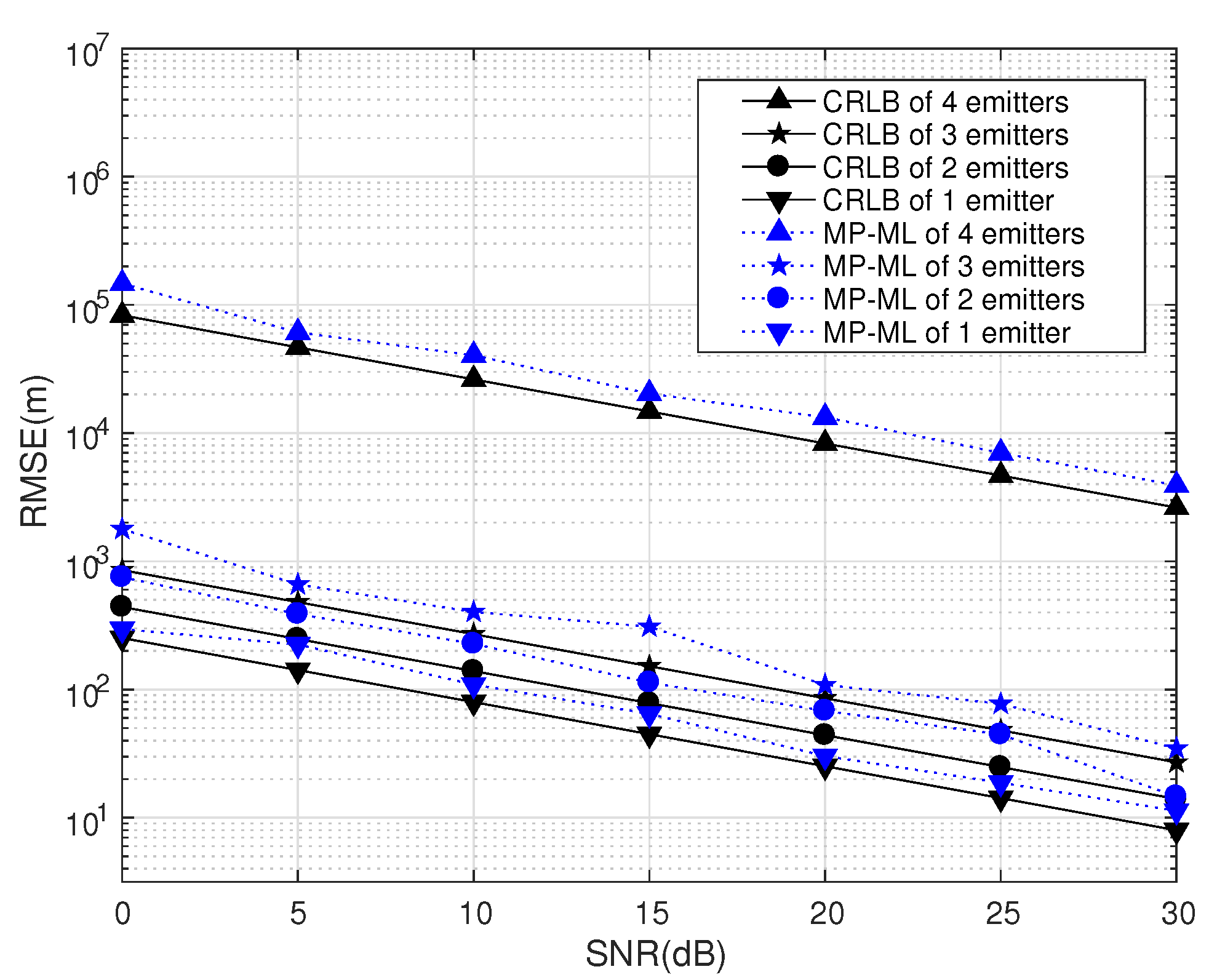
In the case of time-sensitive positioning, the number of snapshots is not enough. The maximum likelihood estimation algorithm for Multi-path Propagation positioning (MP-ML) maximizes the likelihood function rather than calculating the covariance matrix of the observations to avoid the requirement of a large number of snapshots. We designed an iterative algorithm and proposed the strategy of choosing an initial solution to accelerate the solving of the programming. Numerical simulation results show that MP-ML can approach the Cramér–Rao Lower Bound (CRLB) relative to MP-MUSIC with the same data length, but MP-ML requires more computation time than the MP-MUSIC method.
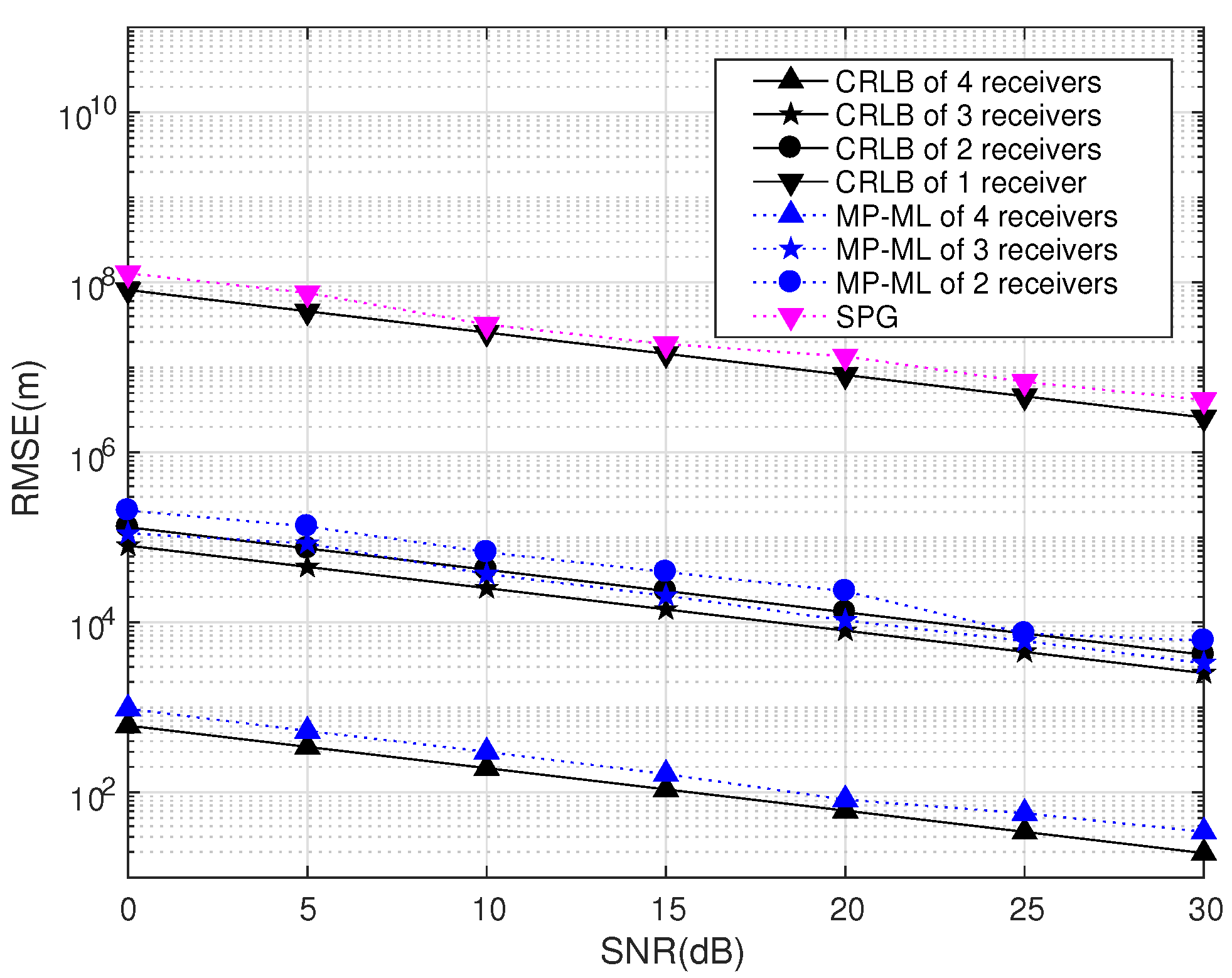
Furthermore, we discussed the performances of MP-ML with different numbers of receiving arrays and emitters. SPG mentioned in [
28] is viewed as a degenerate version of MP-ML (where
and
). The numerical results shows that it is worthwhile to increase the number of receiving stations in the sense of a weak signal, although MP-ML increases the hardware costs, communication overhead and computational complexity.
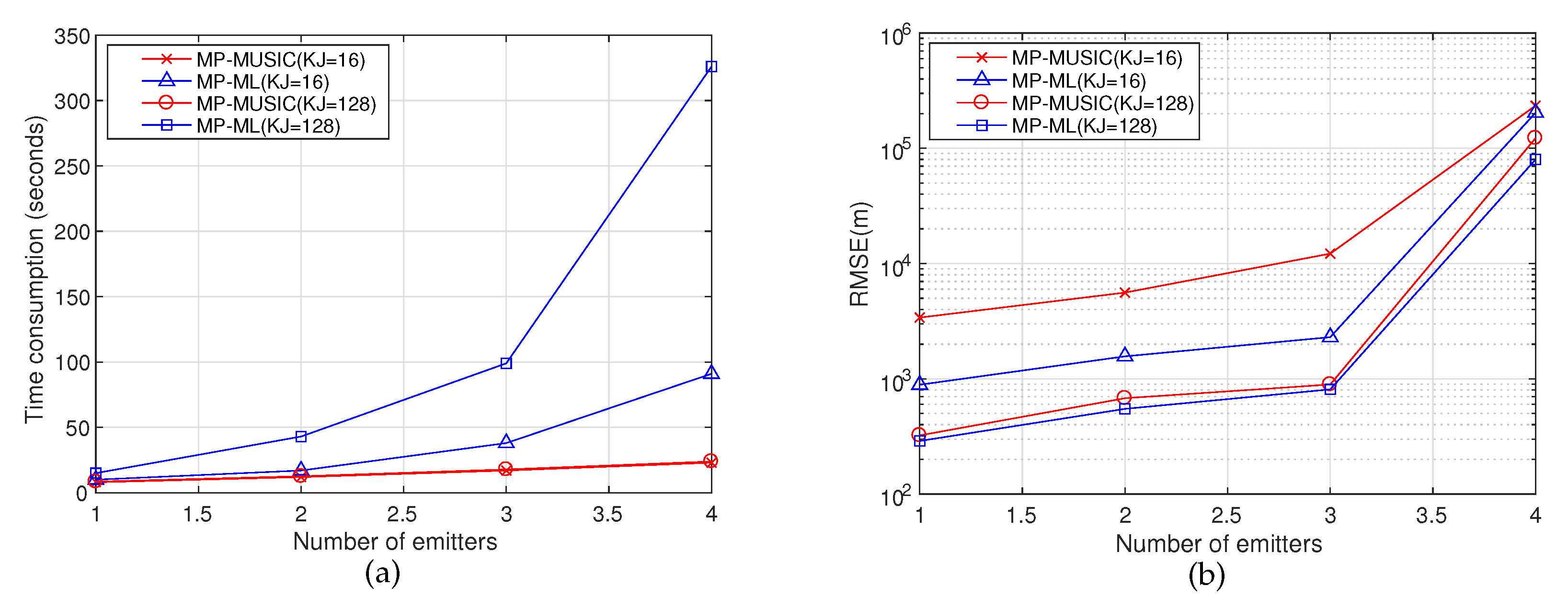
We compared the performances and time consumptions of MP-MUSIC and MP-ML by numerical simulations. MP-ML obtains a more precise position estimation than MP-MUSIC, and MP-MUSIC consumes less time than MP-ML. In a specific positioning application, we choose the appropriate method according to the number of snapshots, the precision requirement and the calculation ability.
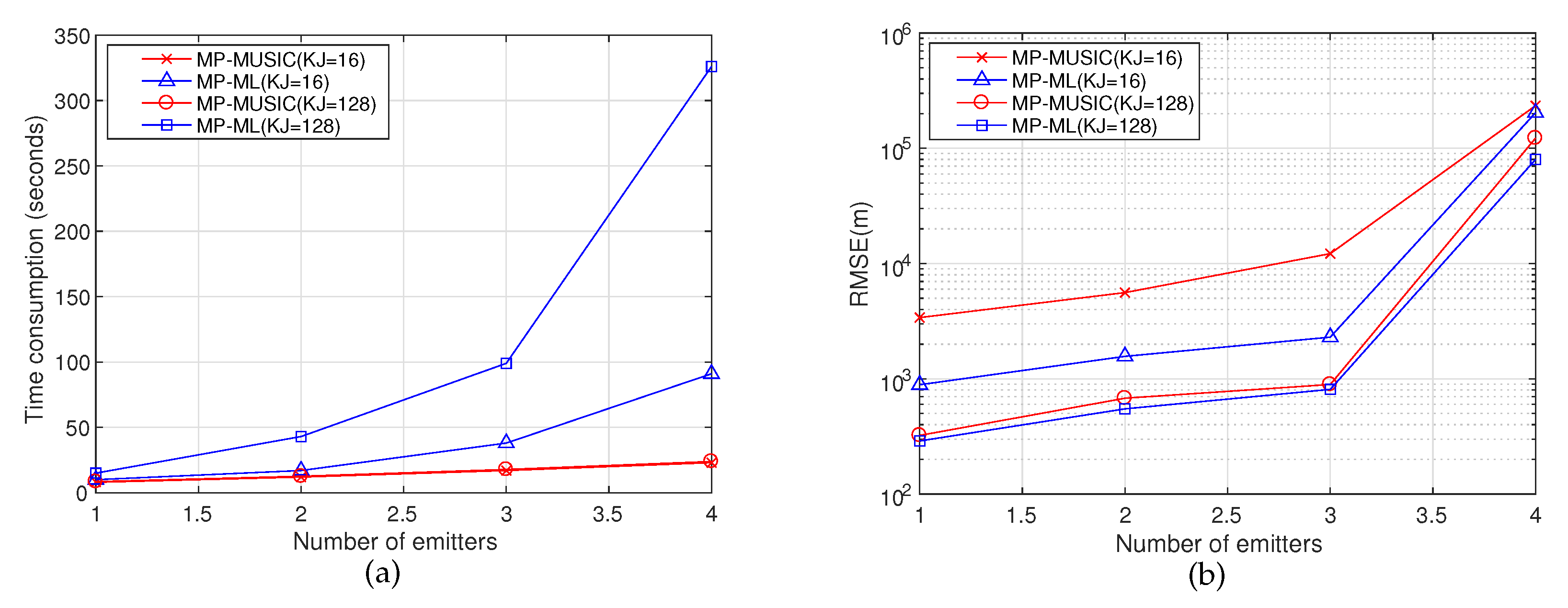
MP-ML has the ability of positioning multiple emitters synchronously. If the number of emitters is far less than the number of transponders, the number of emitters has only a slight influence on the positioning performance. If the number of emitters is equal to the number of transponders, the performance will decline significantly. If the number of emitters is more than the number of transponders, MP-ML cannot find any emitter at all.
An MTRE system requires more receiving arrays, more transponders and more computing resources compared to a Single Geolocation Platform (SGP) or a Direction Finding System (DFS). However, an MTRE system can locate multiple emitters synchronously and provides a higher positioning accuracy than SGP and DFS. It is suitable for some cost-insensitive applications, such as military and national security applications.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}