Communication Architecture in Mixed-Reality Simulations of Unmanned Systems


Abstract
:
1. Introduction
2. Related Work
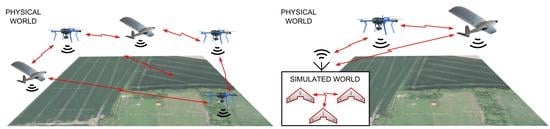
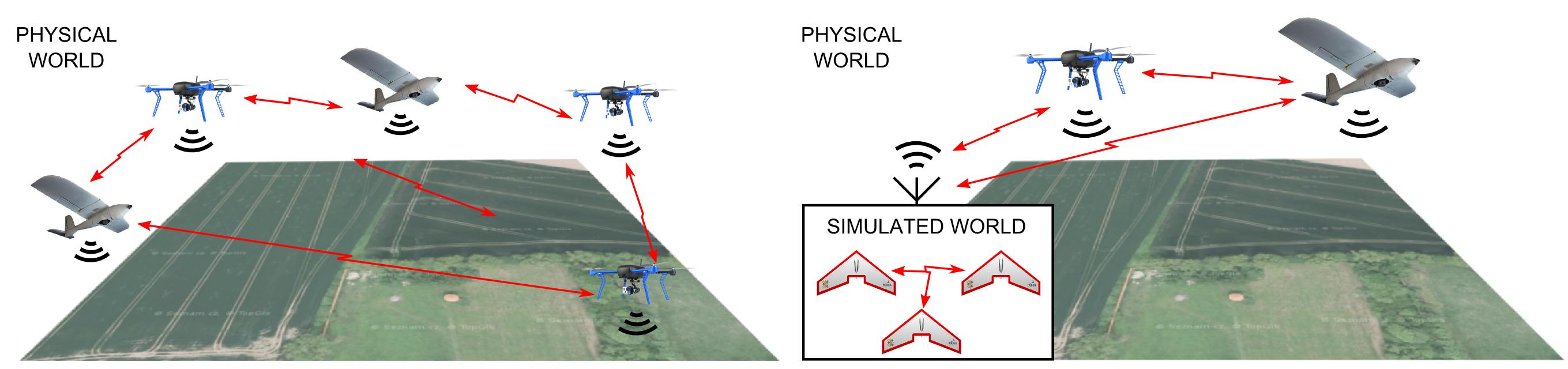
3. Message Exchange in Mixed-Reality Simulation
4. Requirements for Communication Architecture
- Addressing—Both SWEs and HWEs need to use unique addresses in a common address space to distinguish message receivers. In addition, messages need to have the option of being addressed selectively (not broadcast) so that (i) information is not given to entities that should not have it (e.g., when not covered by their sensors), (ii) the processing power of entities that are not receivers of the message is spared, and (iii), in some cases, wireless medium bandwidth is saved (e.g., when multiple wireless channels are used for communication or a directional information transfer methods are employed).
- Transparent routing—The system must provide the transparent routing of messages between SWEs and HWEs.
- Identical message management—Messages of HWEs and SWEs need to be managed similarly. Using different mechanisms for processing of HW and SW messages can bias tests regarding measurements of communication throughput, topology management, and team coordination.
- Visibility model—The system must be able to model communication visibility among all entities in the simulation (either based on their physical reachability or based on a signal propagation model) to provide high-fidelity simulations.
- Network partitions—In the case of two or more vehicles being out of communication range of the others and/or the simulation platform (i.e., GCS), the system should ensure that communication inside these newly created network partitions remain untouched.
- Sharing single address—When a communication bridge/relay between the networks of HWEs and SWEs is used, such entities need to be able to handle addressing using a single address of the bridge. It is necessary to determine the physical destination address of the messages that need to be relayed to other network types.
5. The Proposed Architecture Design
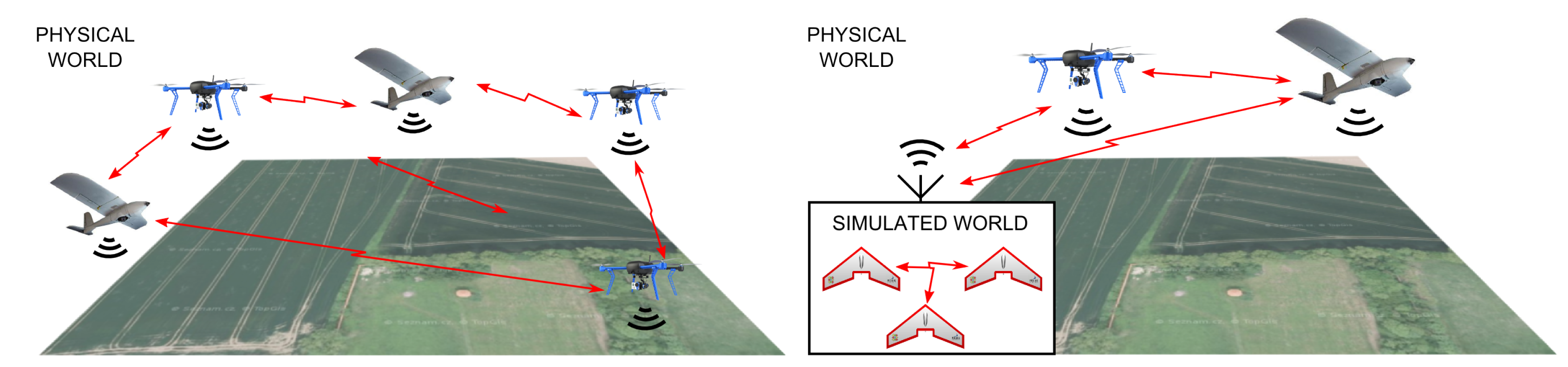
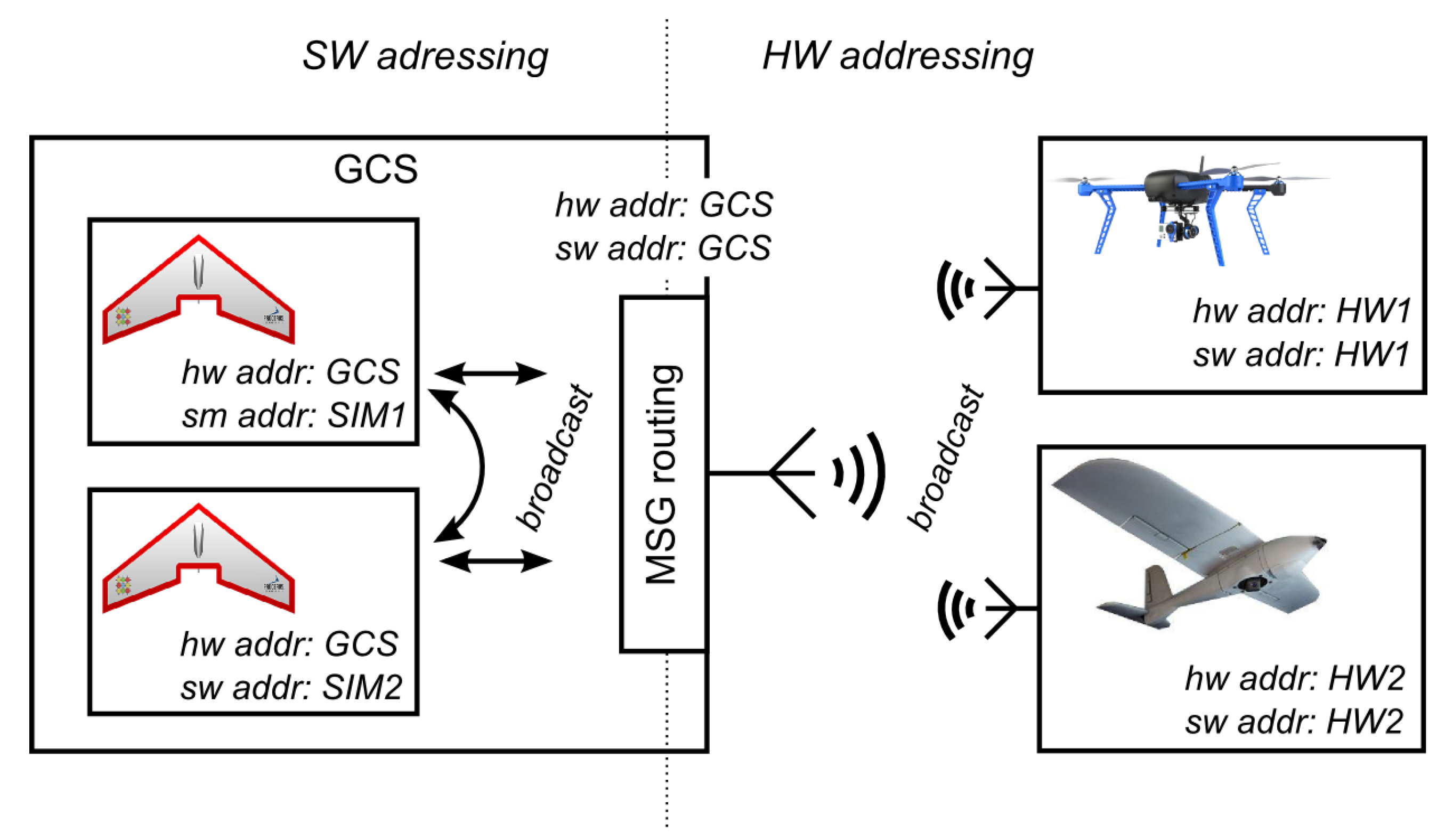
5.1. Addressing
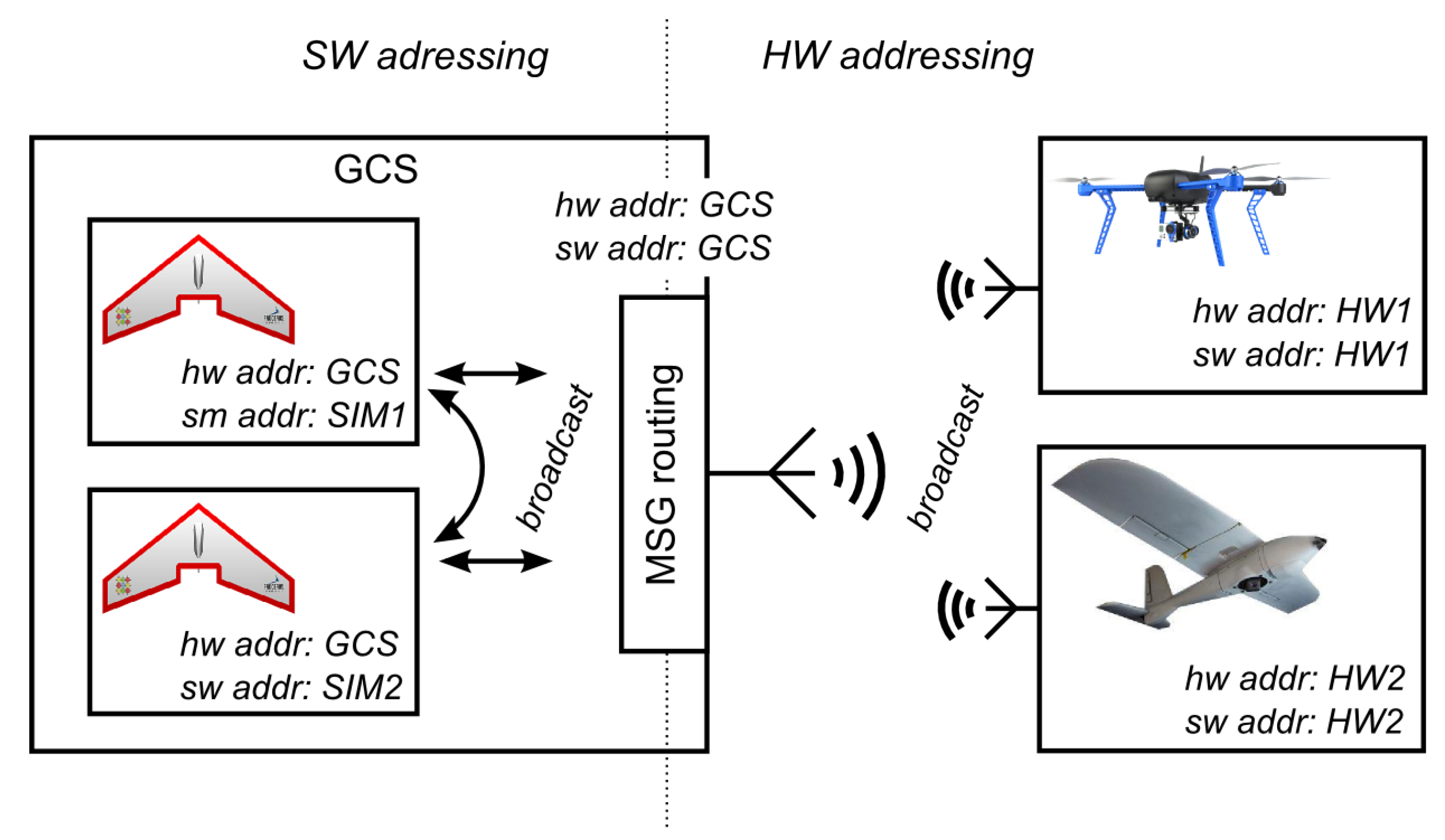
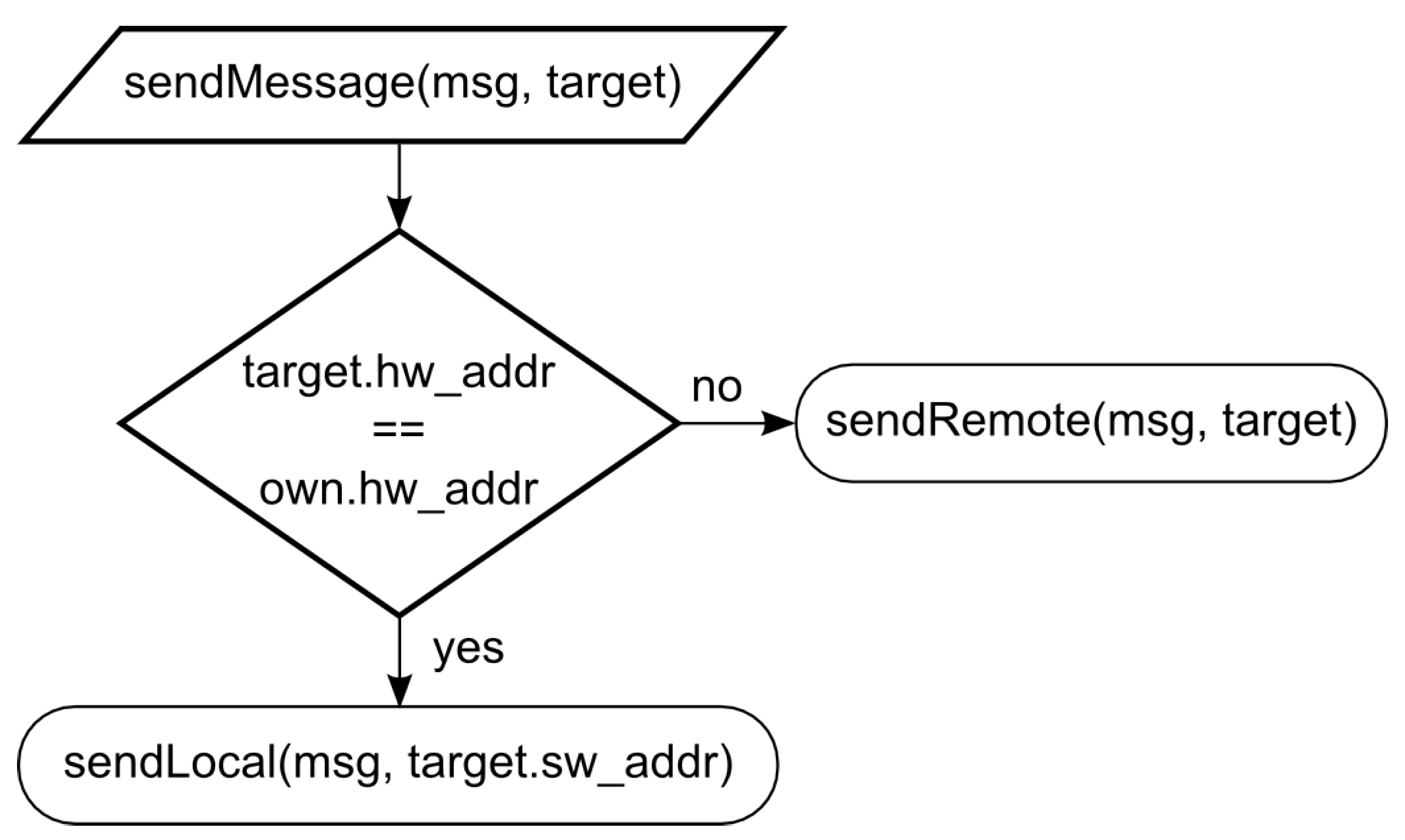
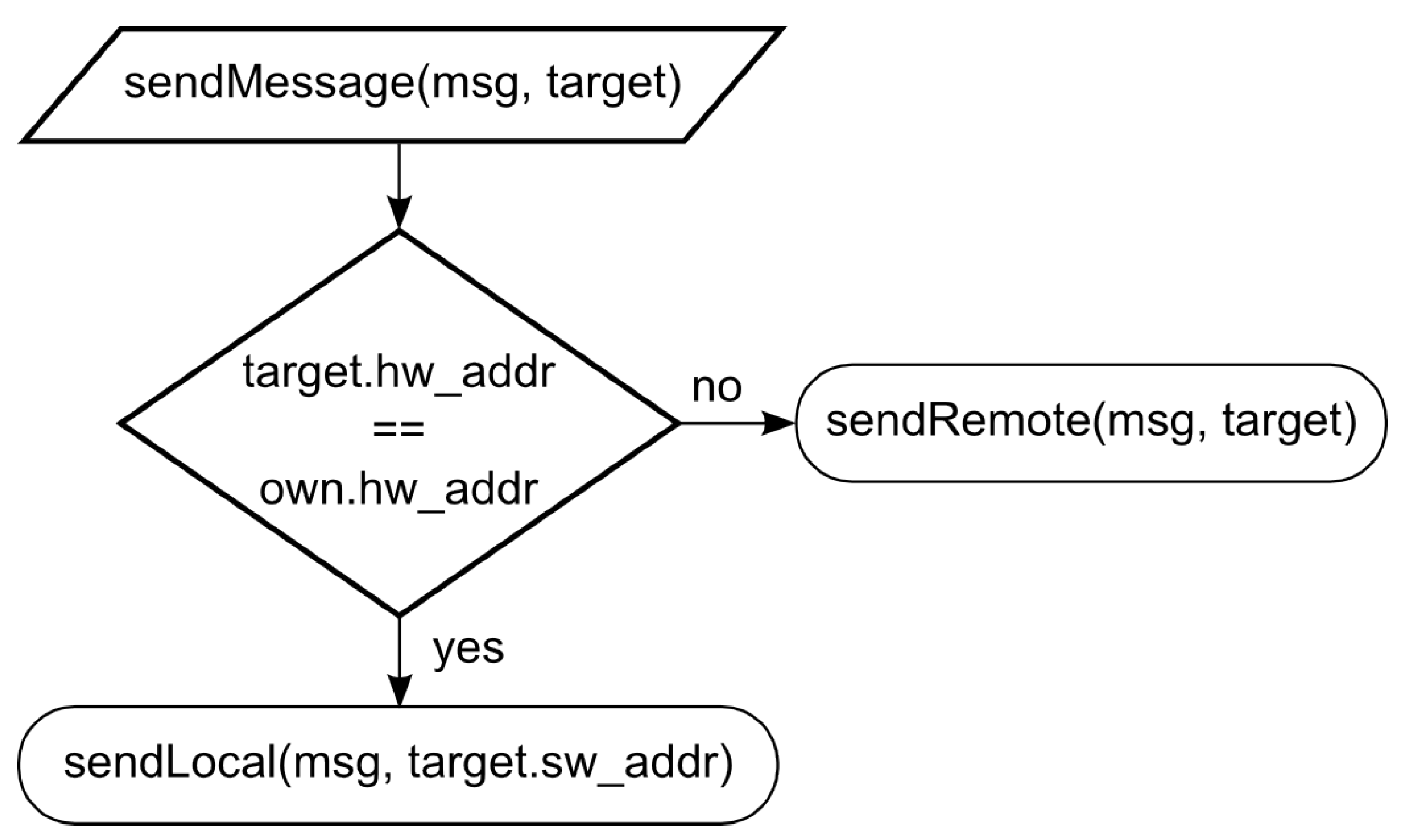
5.2. Routing
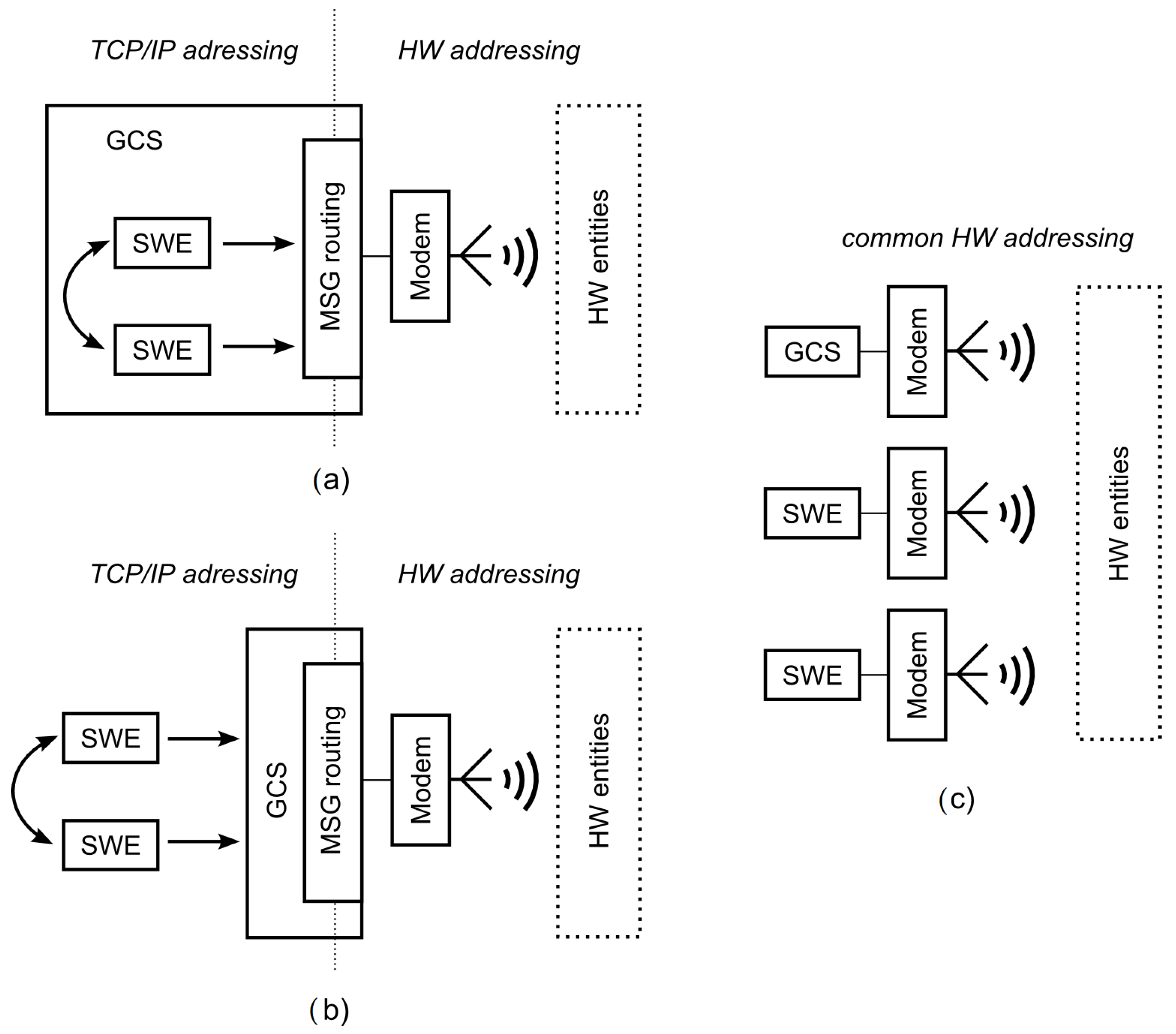
- Advertisement altering—When re-broadcasting advertisements to the SWEs, the GCS changes both address parts of the advertising HWE to SW and HW addresses of this GCS while keeping a list that links the HWE IDs with their real addresses. Then, SWEs keep pairs of the HWEs’ IDs linked to the address of the GCS; thus, it sends the message directly to the GCS whenever an SWE has to send a message to an HWE. The main advantage of this approach is that no fixed gateway address needs to be specified for the SW nodes. On the other hand, altering every advertisement message is inefficient in scenarios with many HWEs.
- Fixed gateway—In this method, SWEs have a predefined gateway for HW addresses that they cannot connect to directly. In this case, the gateway address is the HW address of the GCS. This approach needs the gateway HW address to be defined and known by all SWEs before the start of the simulation, which may be limiting in some scenarios. However, apart from that, no further actions are needed for the correct message routing. Due to its simplicity and efficiency, this particular method with the fixed gateway for all SWEs is the selected approach adopted in the proposed architecture.
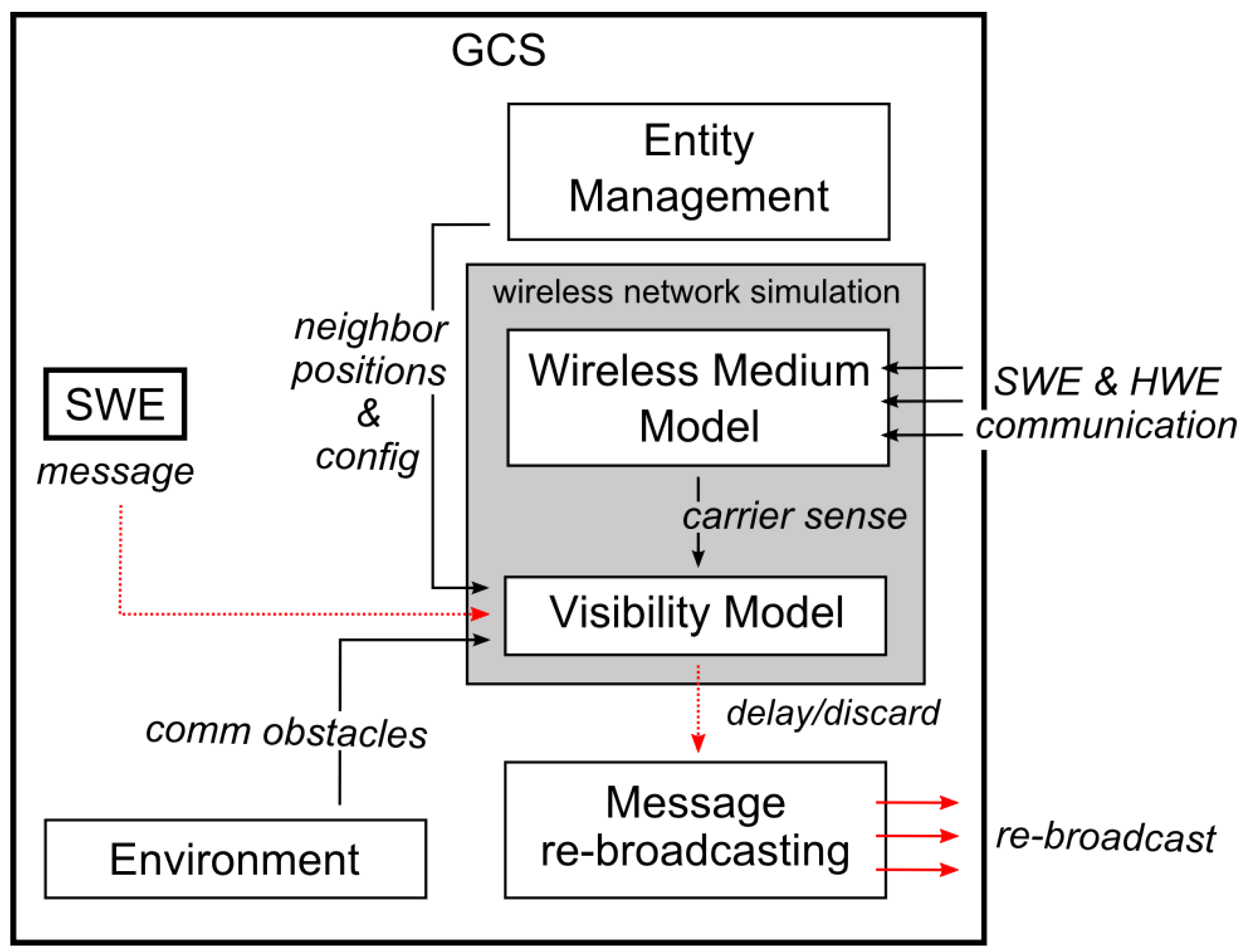
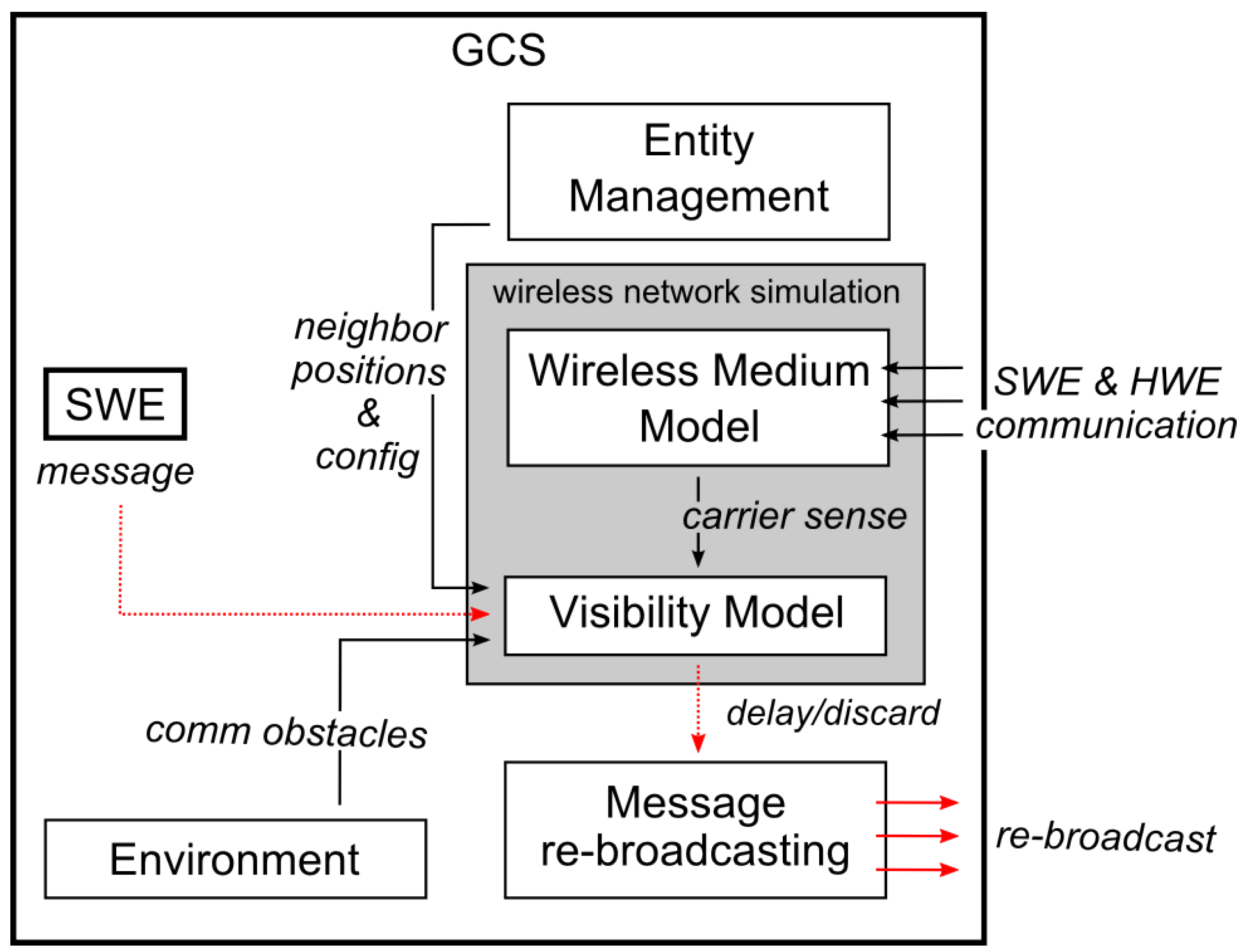
5.3. Visibility Model
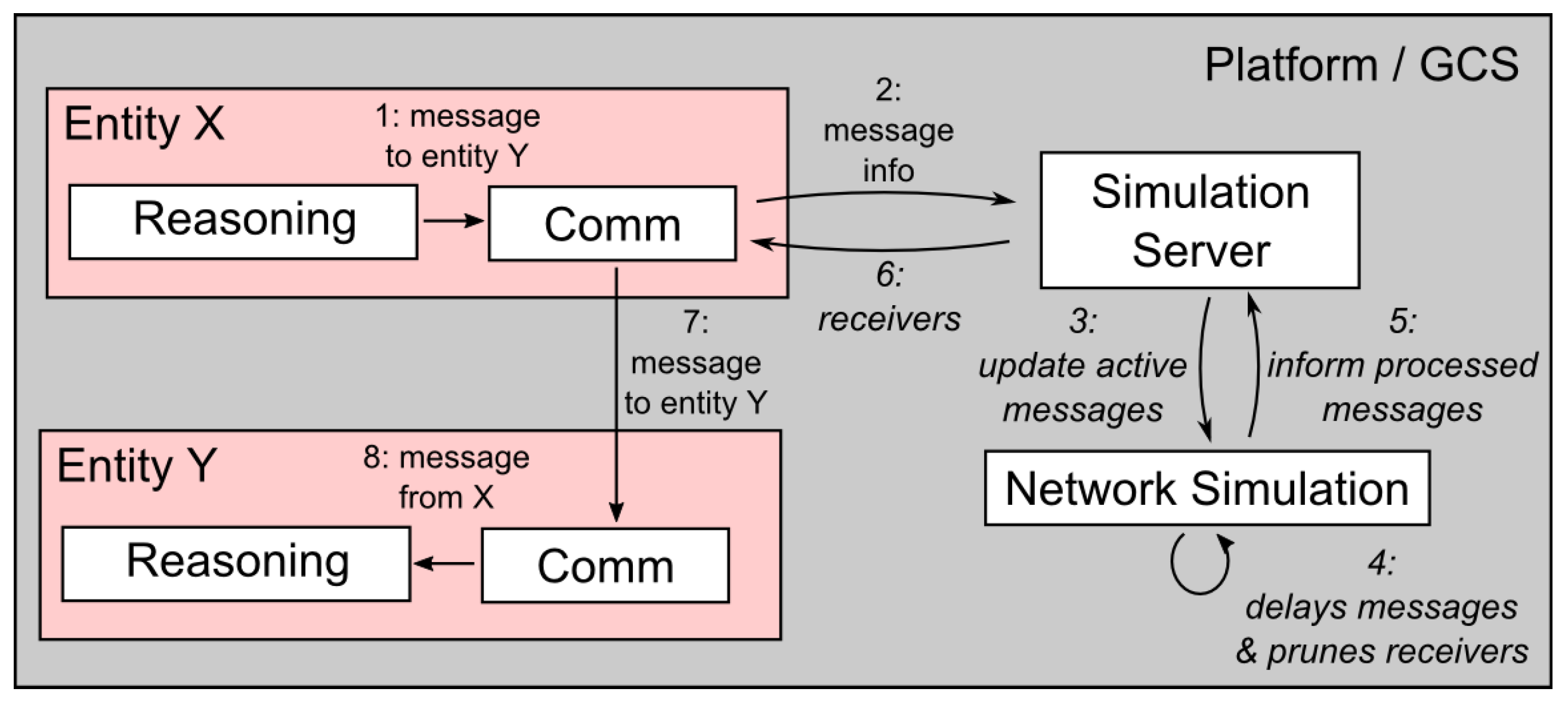
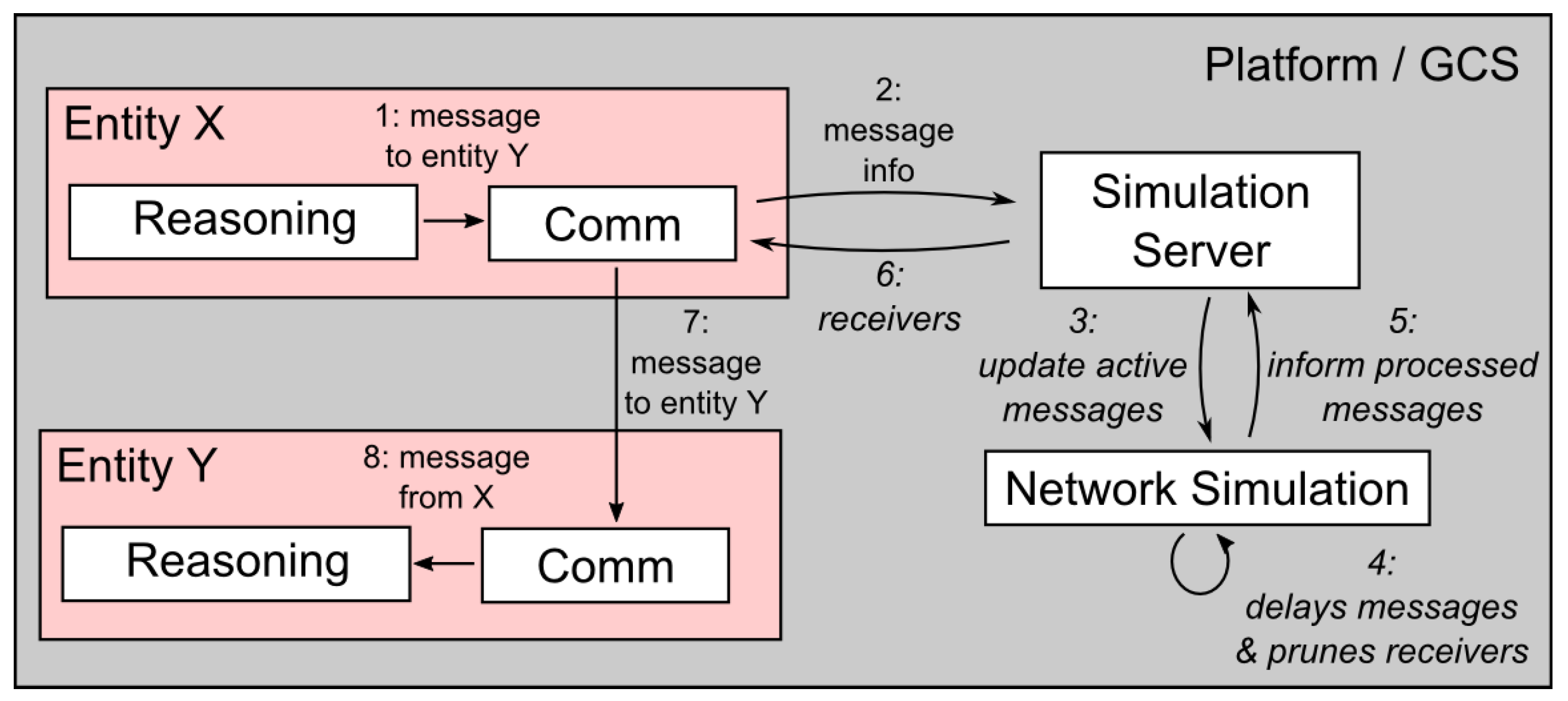
5.3.1. The Principle of Network Simulation Inside MR Simulations
- The message is intercepted on the level of entity X’s Comm layer.
- The digest of the message (sender, receiver(s), size, and transmission power) is sent to the Simulation server.
- The Simulation server updates its network simulation model with this message digest.
- The network simulation model decides (based on the information about the sender, receivers, obstacles, the actual wireless medium occupation, and the MAC protocol used) how much the message should be delayed and which receivers are reachable.
- When the message is ready to be sent to their receivers, the network simulation model informs the Simulation server.
- The Comm layer of entity X is informed that the message is ready to be sent.
- The message is passed to the Comm layer of entity Y.
- The message is received, and its content can be processed.
6. Addressing the Precision Aspects of the Proposed Architecture
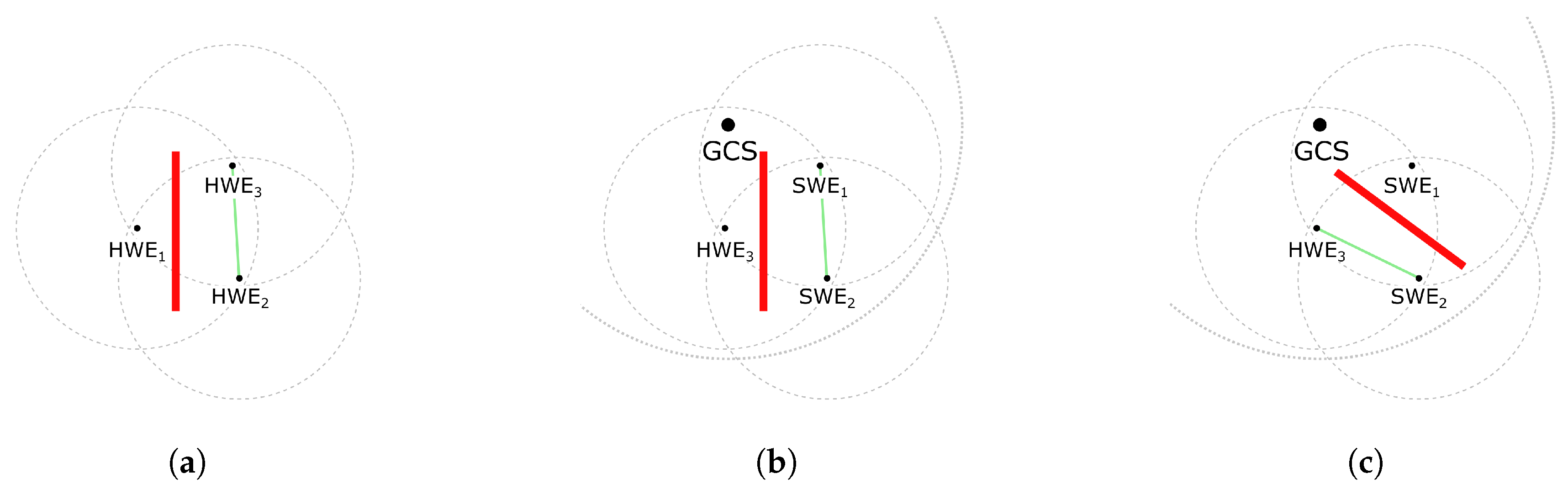
6.1. HWE–SWE Communication Reachability
- Nodes SWE and HWE should not be mutually visible, but they are.
- Nodes SWE and HWE should be mutually visible, but they are not.
- Communication between nodes SWE and HWE should not interfere with the communication between nodes HWE and HWE, but it does.
- A proper model of the RF signal propagation should be used for the message transmission between the HWE–SWE pairs to limit the message receivers to those that can be reached. This can be done during the message re-transmission issued by the simulation platform. The particular mechanism of the wireless network simulation that can be used to address this aspect is described in Section 5.3.
- Range testing of the simulation scenarios needs to be limited to the area that is reachable for the signal of the particular simulation platform’s modem. The modem has to be equipped with a high gain antenna to provide as large a testing area as possible. This way, no HWE can get outside of the range of the simulation platform and thus out of the range of any SWE (unless it is caused by the signal propagation model mentioned in the previous case).
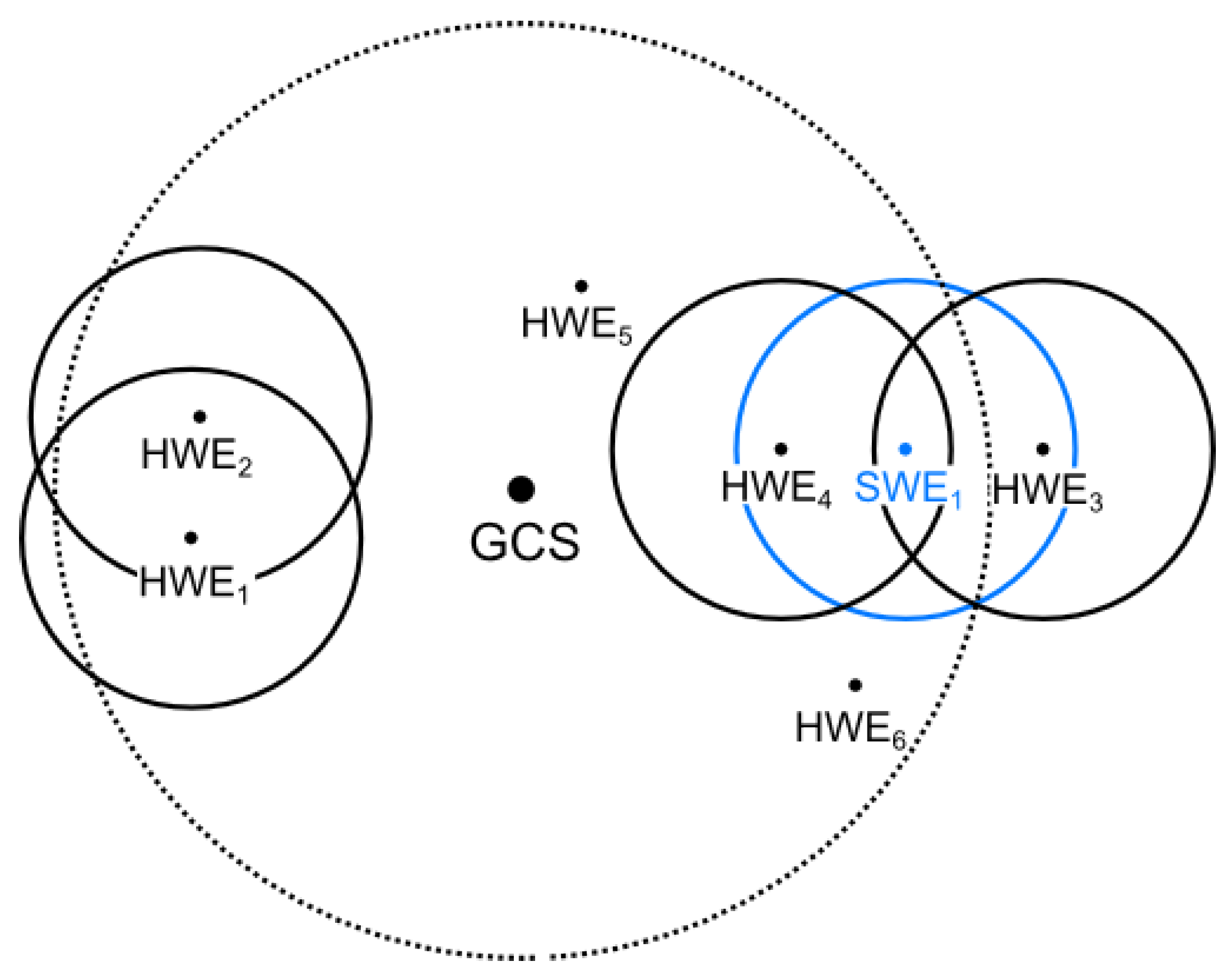
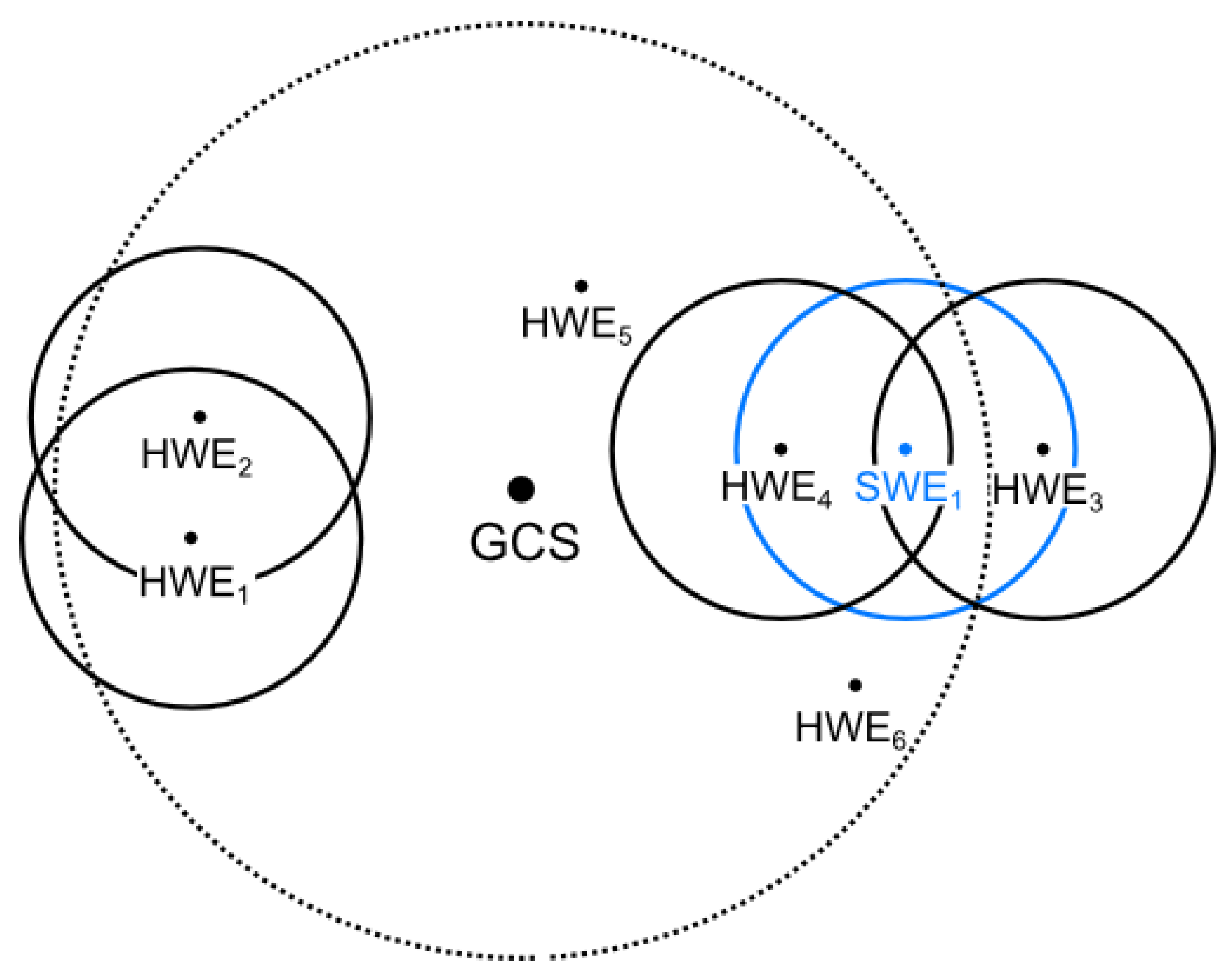
- Undesired signal interference caused by the simulation platform affects all communications in the reachable area of the platform’s modem. It cannot be avoided; only its effects are limited. Two particular precautions can be taken. First, the transmit power of the platform’s modem can be adjusted for every transmission and set to the minimal required power for a successful message reception; therefore, it does not influence nodes further away from the platform. For example, if the power is set to transmit a message to HWE in Figure 7, HWE would not be affected; however, HWE would still be. Second, the simulation platform’s modem can be equipped with multiple directional antennas and a mechanism for using only selected ones for message transmissions based on the knowledge of positions of the target entities. However, the results of these two particular precautions have not been reported in the herein presented evaluation results. They are the subject of our future work.
6.2. Bandwidth of a Single Relay Point
- Transmission delays caused by the medium access and back-off mechanisms need to be emulated. This is done by utilizing the medium access control (MAC) layer for SWEs as shown in Figure 5. Moreover, the arrival of HW messages at the simulation platform needs to be monitored and integrated into the MAC layer model to limit the available bandwidth of the SWEs. Obviously, this behavior is dependent on the MAC protocol used, whether they are contention-based, contention-free [22], or hybrid MAC protocols [23] suggested for VANETs. Section 5.3 describes the mechanism of the wireless network simulation that can be used to address this simulation aspect.
- The broadcasting nature of the wireless channel traffic needs to be emulated, and the bandwidth of HWEs needs to be limited. In the proposed architecture, this is achieved by injecting controlled RF signal interference. Specifically, all message transmissions between SWEs need to be re-broadcasted over the simulation platform’s modems as stated in Section 5.3. This, however, results in the issues of undesired interferences discussed in Section 6.1.
- Transmission data rates of all SWEs must be limited not to collectively request to transmit more data per second than the modem used by the simulation platform is physically capable of transmitting. This is achieved by using a high data-rate modem for the simulation platform, limiting the number of simultaneous large data transmissions, or, if the previous cases are not applicable, by limiting the number of SWEs in the simulation. Another option to prevent large simultaneous data-rate requests is to ensure the distribution of SWE transmissions over time to comply with modem limitations. However, this last approach has not yet been implemented and is a subject of the future work.
7. Experiments
7.1. Testbed Configurations
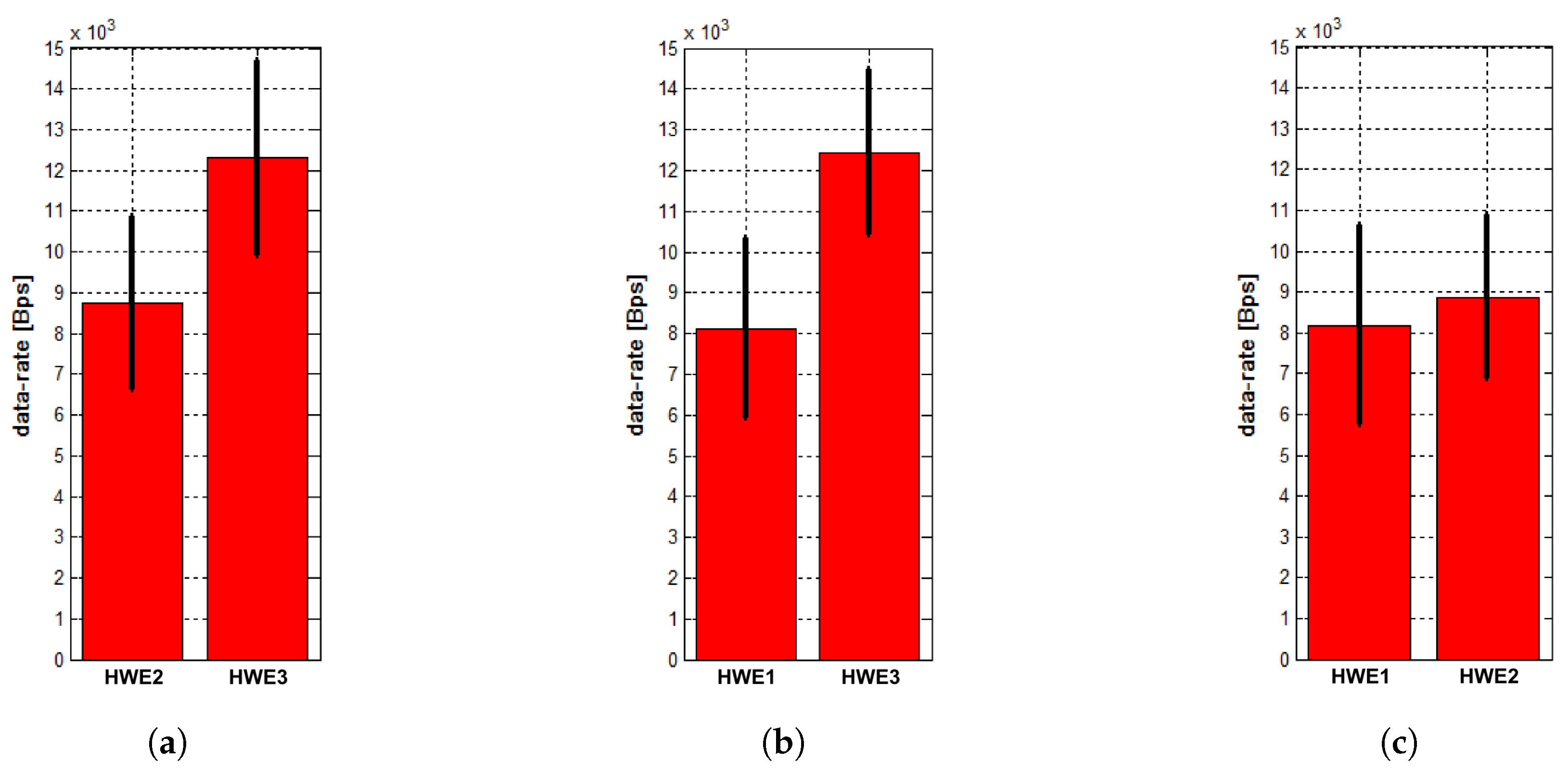
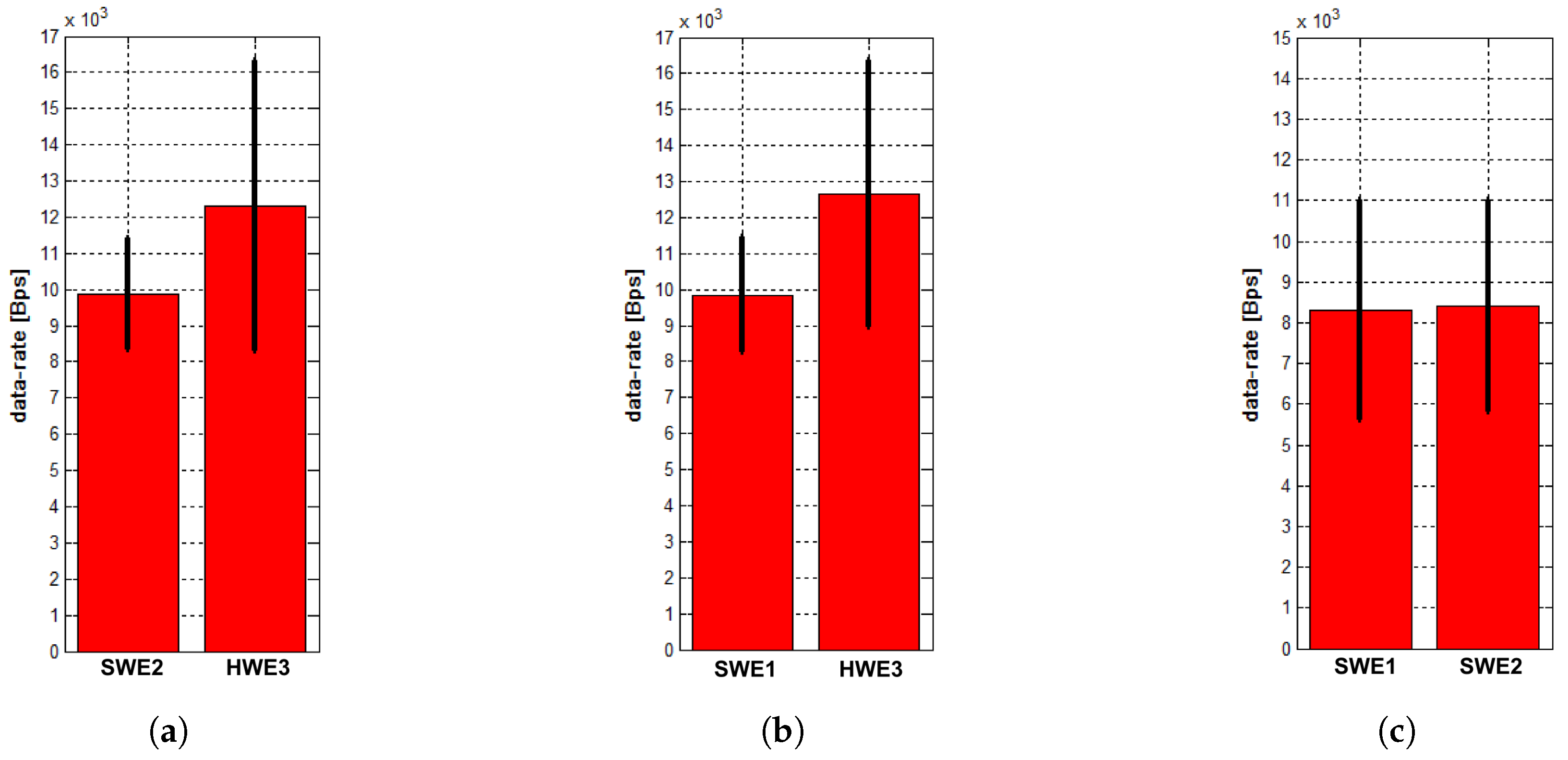
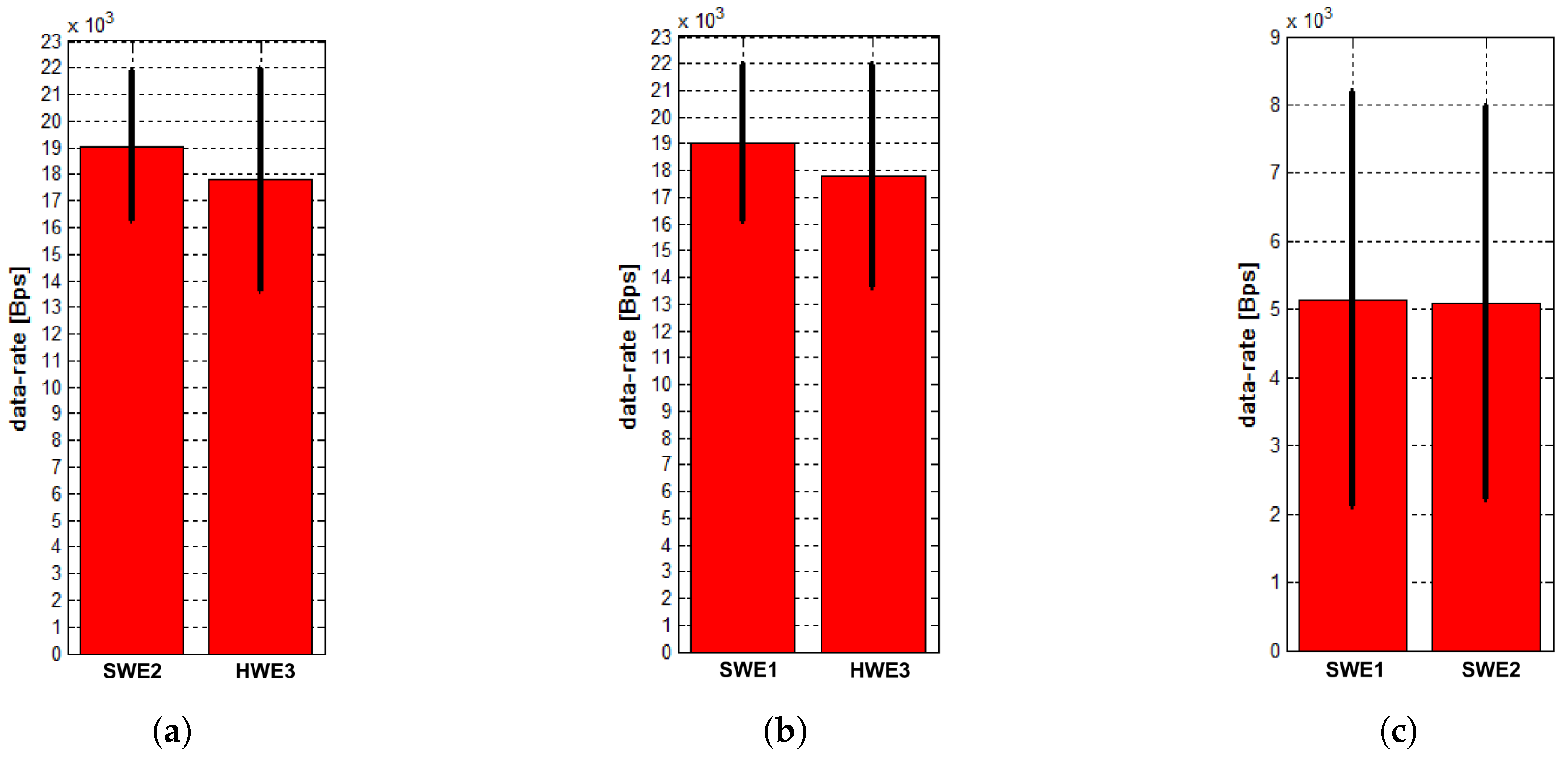
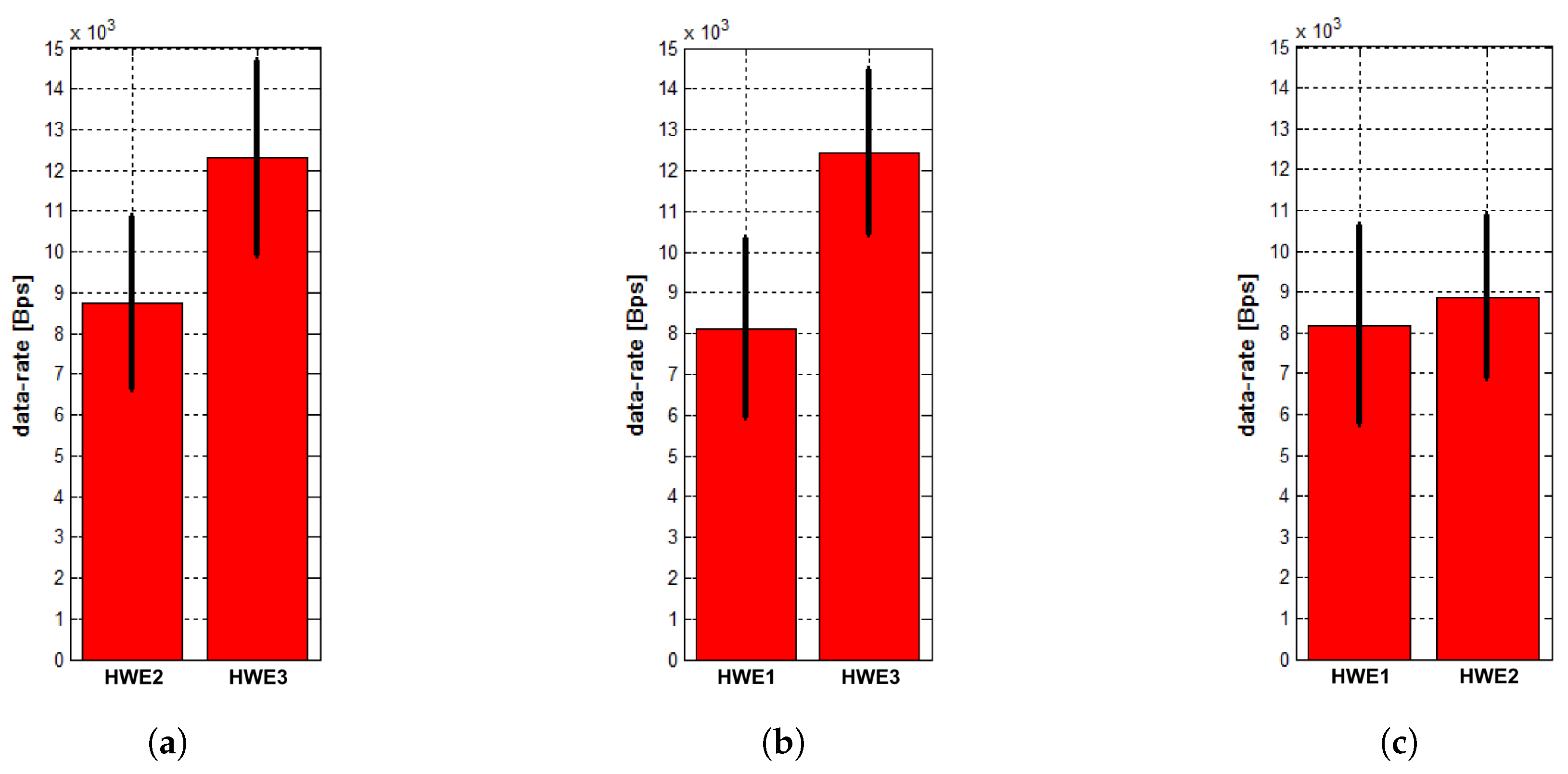
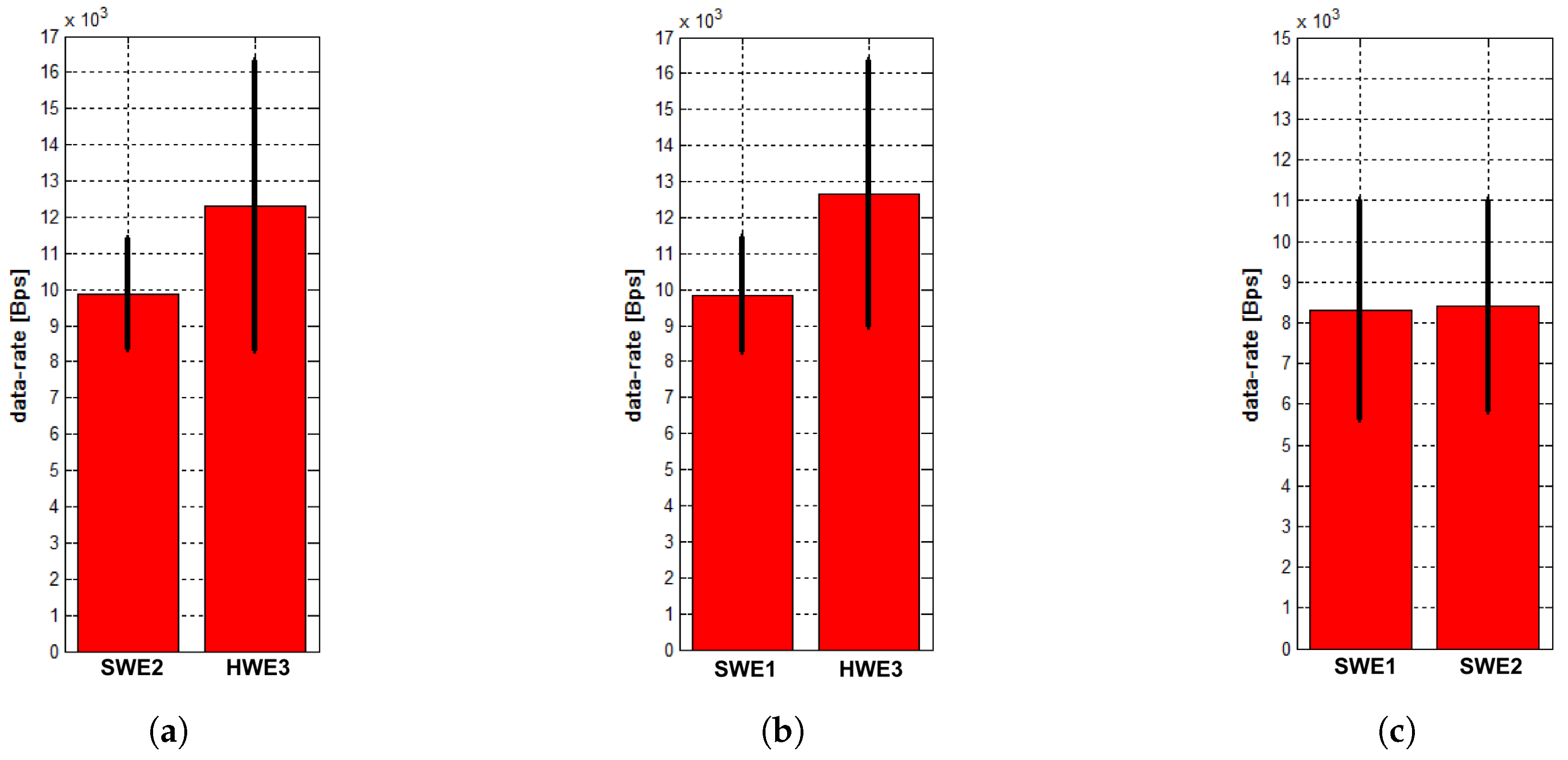
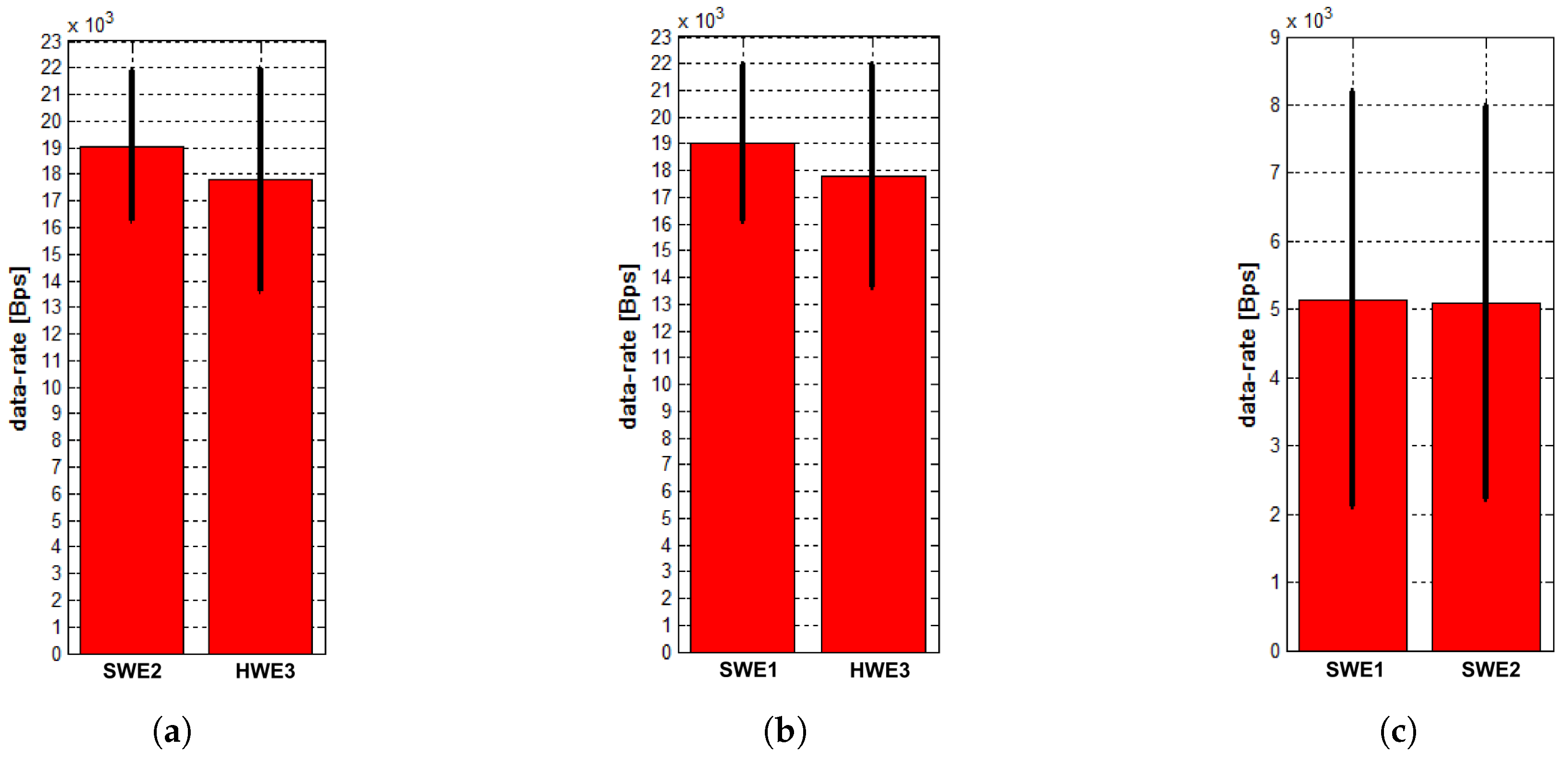
7.2. Results
7.3. Example of Simulation Performance on Physical Layer
8. Deployment Examples
9. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| FANET | flying ad-hoc network |
| GCS | ground control station |
| HW | hardware |
| HWE | entity embodied in the physical world |
| MAC | medium access control |
| MANET | mobile ad-hoc network |
| MR | mixed-reality |
| RF | radio-frequency |
| SW | software |
| SWE | virtual entity |
| UAV | unmanned aerial vehicle |
| UAS | unmanned aerial system |
| V2I | vehicle-to-infrastructure |
| V2V | vehicle-to-vehicle |
| VANET | vehicle ad-hoc network |
References
- Demers, S.; Gopalakrishnan, P.; Kant, L. A generic solution to software-in-the-loop. In Proceedings of the IEEE Military Communications Conference (MILCOM), Orlando, FL, USA, 29–31 October 2007; pp. 1–6. [Google Scholar]
- Komenda, A.; Vokřínek, J.; Čáp, M.; Pěchouček, M. Developing multiagent algorithms for tactical missions using simulation. IEEE Intell. Syst. 2013, 28, 42–49. [Google Scholar] [CrossRef]
- Nikaein, N.; Bonnet, C. Topology management for improving routing and network performances in mobile ad hoc networks. Mob. Netw. Appl. 2004, 9, 583–594. [Google Scholar] [CrossRef]
- Avellar, G.S.; Pereira, G.A.; Pimenta, L.C.; Iscold, P. Multi-UAV routing for area coverage and remote sensing with minimum time. Sensors 2015, 15, 27783–27803. [Google Scholar] [CrossRef] [PubMed]
- Li, B.; Jiang, Y.; Sun, J.; Cai, L.; Wen, C.Y. Development and testing of a two-UAV communication relay system. Sensors 2016, 16, 1696. [Google Scholar] [CrossRef] [PubMed]
- Pal, A.; Tiwari, R.; Shukla, A. Communication constraints multi-agent territory exploration task. Appl. Intell. 2013, 38, 357–383. [Google Scholar] [CrossRef]
- Balduccini, M.; Nguyen, D.N.; Regli, W.C. Coordinating UAVs in dynamic environments by network-aware mission planning. In Proceedings of the IEEE Military Communications Conference (MILCOM), Baltimore, MD, USA, 6–8 October 2014; pp. 983–988. [Google Scholar]
- Fadlullah, Z.M.; Takaishi, D.; Nishiyama, H.; Kato, N.; Miura, R. A dynamic trajectory control algorithm for improving the communication throughput and delay in UAV-aided networks. IEEE Netw. 2016, 30, 100–105. [Google Scholar] [CrossRef]
- Saad, W.; Han, Z.; Basar, T.; Debbah, M.; Hjorungnes, A. Hedonic coalition formation for distributed task allocation among wireless agents. IEEE Trans. Mob. Comput. 2011, 10, 1327–1344. [Google Scholar] [CrossRef]
- Milgram, P.; Kishino, F. A taxonomy of mixed reality visual displays. IEICE Trans. Inf. Syst. 1994, 77, 1321–1329. [Google Scholar]
- Chen, I.; MacDonald, B.; Wunsche, B. Mixed reality simulation for mobile robots. In Proceedings of the IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 232–237. [Google Scholar]
- Chen, I.; MacDonald, B.; Wunsche, B. Evaluating the effectiveness of mixed reality simulations for developing UAV systems. In Proceedings of the International Conference on Simulation, Modeling, and Programming for Autonomous Robots, Tsukuba, Japan, 5–8 November 2012; pp. 388–399. [Google Scholar]
- Honig, W.; Milanes, C.; Scaria, L.; Phan, T.; Bolas, M.; Ayanian, N. Mixed reality for robotics. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 5382–5387. [Google Scholar]
- Jakob, M.; Pěchouček, M.; Čáp, M.; Novák, P.; Vaněk, O. Mixed-reality testbeds for incremental development of HART applications. IEEE Intell. Syst. 2012, 27, 19–25. [Google Scholar] [CrossRef]
- Selecký, M.; Faigl, J.; Rollo, M. Mixed reality simulation for incremental development of multi-UAV systems. In Proceedings of the International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 13–16 June 2017; pp. 1530–1538. [Google Scholar]
- Selecký, M.; Rollo, M.; Losiewicz, P.; Reade, J.; Maida, N. Framework for incremental development of complex unmanned aircraft systems. In Proceedings of the Integrated Communication, Navigation, and Surveillance Conference (ICNS), Herdon, VA, USA, 21–23 April 2015; pp. J3-1–J3-9. [Google Scholar]
- Selecký, M.; Štolba, M.; Meiser, T.; Čáp, M.; Komenda, A.; Rollo, M.; Vokřínek, J.; Pěchouček, M. Deployment of multi-agent algorithms for tactical operations on UAV hardware. In Proceedings of the International Conference on Autonomous Agents and Multi-Agent Systems (AAMAS), St. Paul, MN, USA, 6–10 May 2013; pp. 1407–1408. [Google Scholar]
- Santi, P. Topology control in wireless ad hoc and sensor networks. ACM Comput. Surv. 2005, 37, 164–194. [Google Scholar] [CrossRef]
- Asadpour, M.; Van den Bergh, B.; Giustiniano, D.; Hummel, K.; Pollin, S.; Plattner, B. Micro aerial vehicle networks: An experimental analysis of challenges and opportunities. IEEE Commun. Mag. 2014, 52, 141–149. [Google Scholar] [CrossRef]
- Pinto, L.R.; Moreira, A.; Almeida, L.; Rowe, A. Characterizing Multihop Aerial Networks of COTS Multirotors. IEEE Trans. Ind. Inform. 2017, 13, 898–906. [Google Scholar] [CrossRef]
- Teng, E.; Falcão, J.D.; Iannucci, B. Holes-in-the-Sky: A field study on cellular-connected UAS. In Proceedings of the International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 13–16 June 2017; pp. 1165–1174. [Google Scholar]
- Gupta, N.; Prakash, A.; Tripathi, R. Medium access control protocols for safety applications in Vehicular Ad-Hoc Network: A classification and comprehensive survey. Veh. Commun. 2015, 2, 223–237. [Google Scholar] [CrossRef]
- Jayaraj, V.; Hemanth, C.; Sangeetha, R. A survey on hybrid MAC protocols for vehicular ad-hoc networks. Veh. Commun. 2016, 6, 29–36. [Google Scholar] [CrossRef]
- Breslau, L.; Estrin, D.; Fall, K.; Floyd, S.; Heidemann, J.; Helmy, A.; Huang, P.; McCanne, S.; Varadhan, K.; Xu, Y.; et al. Advances in network simulation. Computer 2000, 33, 59–67. [Google Scholar] [CrossRef]
- Varga, A. Discrete event simulation system. In Proceedings of the European Simulation Multiconference (ESM’2001), Prague, Czech Republic, 6–9 June 2001. [Google Scholar]
- Bekmezci, I.; Sahingoz, O.K.; Temel, Ş. Flying ad-hoc networks (FANETs): A survey. Ad Hoc Netw. 2013, 11, 1254–1270. [Google Scholar] [CrossRef]
- Oubbati, O.S.; Lakas, A.; Zhou, F.; Güneş, M.; Yagoubi, M.B. A survey on position-based routing protocols for Flying Ad hoc Networks (FANETs). Veh. Commun. 2017. [Google Scholar] [CrossRef]
- Aschenbruck, N.; Munjal, A.; Camp, T. Trace-based mobility modeling for multi-hop wireless networks. Comput. Commun. 2011, 34, 704–714. [Google Scholar] [CrossRef]
- Krajzewicz, D.; Bonert, M.; Wagner, P. The open source traffic simulation package SUMO. In Proceedings of the RoboCup 2006, Bremen, Germany, 19–20 June 2006. [Google Scholar]
- Härri, J.; Filali, F.; Bonnet, C.; Fiore, M. VanetMobiSim: Generating realistic mobility patterns for VANETs. In Proceedings of the 3rd International Workshop on Vehicular ad-hoc Networks, Los Angeles, CA, USA, 29 September 2006; pp. 96–97. [Google Scholar]
- Kuiper, E.; Nadjm-Tehrani, S. Mobility models for UAV group reconnaissance applications. In Proceedings of the International Conference on Wireless and Mobile Communications (ICWMC), Bucharest, Romania, 29–31 July 2006; p. 33. [Google Scholar]
- Bujari, A.; Palazzi, C.E.; Ronzani, D. FANET Application Scenarios and Mobility Models. In Proceedings of the 3rd Workshop on Micro Aerial Vehicle Networks, Systems, and Applications, Niagara Falls, NY, USA, 23 June 2017; pp. 43–46. [Google Scholar]
- Silva, C.M.; Masini, B.M.; Ferrari, G.; Thibault, I. A survey on infrastructure-based vehicular networks. Mob. Inf. Syst. 2017, 2017, 6123868. [Google Scholar] [CrossRef]
- Göktogan, A.H.; Sukkarieh, S. Distributed simulation and middleware for networked UAS. In Unmanned Aircraft Systems; Springer: Berlin/Heidelberg, Germany, 2008; pp. 331–357. [Google Scholar]
- Pizetta, I.H.B.; Brandao, A.S.; Sarcinelli-Filho, M. A Hardware-in-the-Loop Platform for Rotary-Wing Unmanned Aerial Vehicles. J. Intell. Robot. Syst. 2016, 84, 725–743. [Google Scholar] [CrossRef]
- Henderson, T.R.; Lacage, M.; Riley, G.F.; Dowell, C.; Kopena, J. Network simulations with the ns-3 simulator. SIGCOMM Demonstr. 2008, 14, 527. [Google Scholar]
- Alvarez, A.; Orea, R.; Cabrero, S.; Pañeda, X.G.; García, R.; Melendi, D. Limitations of network emulation with single-machine and distributed ns-3. In Proceedings of the 3rd International ICST Conference on Simulation Tools and Techniques, Malaga, Spain, 15–19 March 2010; p. 67. [Google Scholar]
- Ahmed, H.; Pierre, S.; Quintero, A. A flexible testbed architecture for VANET. Veh. Commun. 2017, 9, 115–126. [Google Scholar] [CrossRef]
- Schünemann, B.; Massow, K.; Radusch, I. Realistic simulation of vehicular communication and vehicle-2-X applications. In Proceedings of the 1st International Conference on Simulation Tools and Techniques for Communications, Networks and Systems & Workshops, Marseille, France, 3–7 March 2008; p. 62. [Google Scholar]
- Sunshine, C.A. Addressing problems in multi-network systems. In IEEE InfoCom; IEEE: Piscataway, NJ, USA, 1982; Volume 82. [Google Scholar]
- Narten, T.; Simpson, W.A.; Nordmark, E.; Soliman, H. Neighbor discovery for IP version 6 (IPv6). Standards Track 2007. Available online: http://www.ietf.org/rfc/rfc4861.txt (accessed on 29 January 2018).
- Nadeem, T.; Dashtinezhad, S.; Liao, C.; Iftode, L. TrafficView: Traffic data dissemination using car-to-car communication. ACM Sigmob. Mob. Comput. Commun. Rev. 2004, 8, 6–19. [Google Scholar] [CrossRef]
- Baldessari, R.; Bödekker, B.; Deegener, M.; Festag, A.; Franz, W.; Kellum, C.C.; Kosch, T.; Kovacs, A.; Lenardi, M.; Menig, C.; et al. Car-2-Car Communication Consortium-Manifesto; Institute of Communication and Navigation: Oberpfaffenhofen, Germany, 2007. [Google Scholar]
- Allouche, Y.; Segal, M. Cluster-based beaconing process for VANET. Veh. Commun. 2015, 2, 80–94. [Google Scholar] [CrossRef]
- Mayer, C.P.; Gamer, T. Integrating Real World Applications into OMNeT++; Tech. Rep. TM-2008-2; Institute of Telematics, University of Karlsruhe: Karlsruhe, Germany, 2008. [Google Scholar]
- Zeng, X.; Bagrodia, R.; Gerla, M. GloMoSim: A library for parallel simulation of large-scale wireless networks. In Proceedings of the Workshop on Parallel and Distributed Simulation (PADS), Banff, AB, Canada, 29 May 1998; pp. 154–161. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
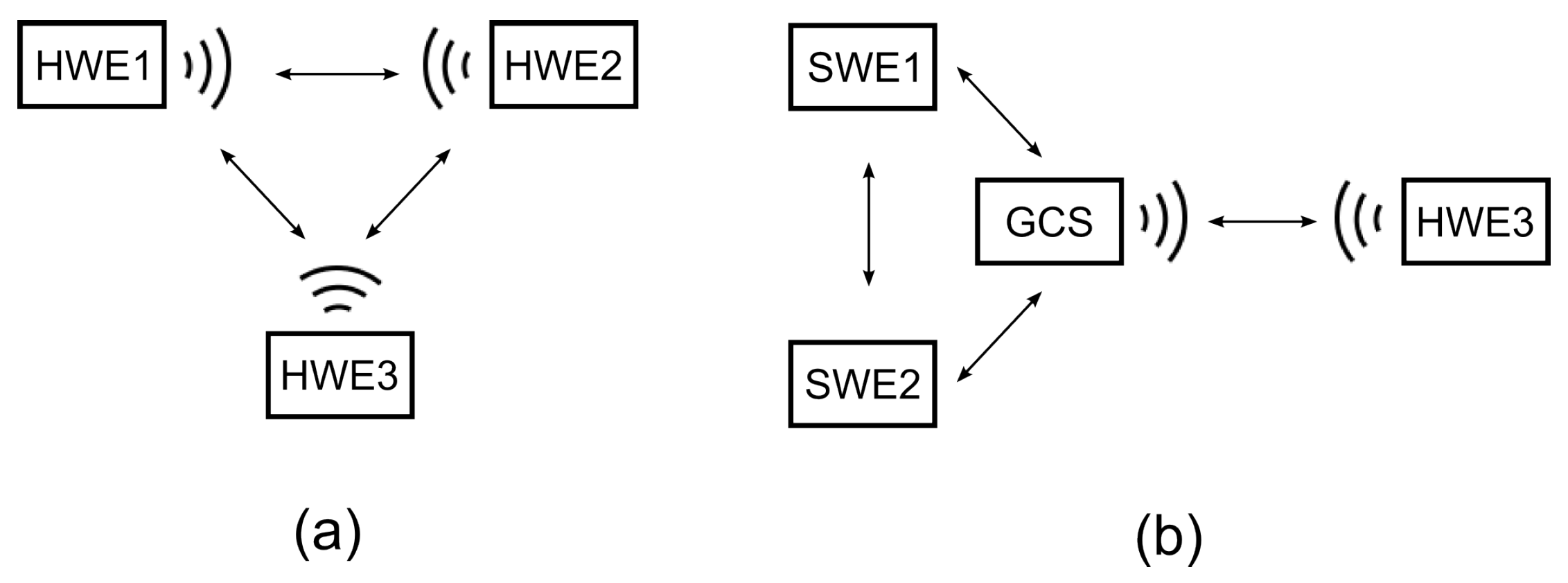
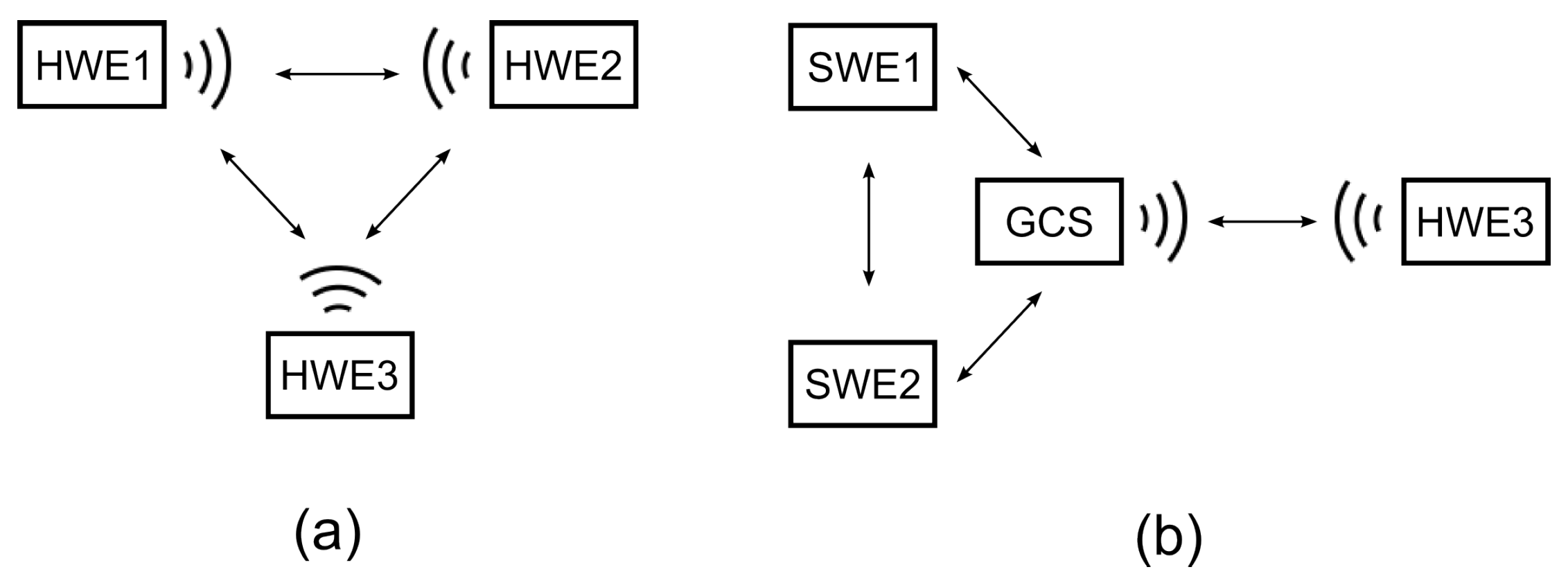
| Type | Tools | Visibility | Method |
|---|---|---|---|
| HWE–HWE | modems | physical | direct (modems) |
| SWE–SWE | sockets | SW model | direct (sockets) |
| HWE–SWE | combined | SW models (limited by physical vis) | message relay |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Selecký, M.; Faigl, J.; Rollo, M. Communication Architecture in Mixed-Reality Simulations of Unmanned Systems. Sensors 2018, 18, 853. https://doi.org/10.3390/s18030853
Selecký M, Faigl J, Rollo M. Communication Architecture in Mixed-Reality Simulations of Unmanned Systems. Sensors. 2018; 18(3):853. https://doi.org/10.3390/s18030853
Chicago/Turabian StyleSelecký, Martin, Jan Faigl, and Milan Rollo. 2018. "Communication Architecture in Mixed-Reality Simulations of Unmanned Systems" Sensors 18, no. 3: 853. https://doi.org/10.3390/s18030853
APA StyleSelecký, M., Faigl, J., & Rollo, M. (2018). Communication Architecture in Mixed-Reality Simulations of Unmanned Systems. Sensors, 18(3), 853. https://doi.org/10.3390/s18030853