Automated Landslides Detection for Mountain Cities Using Multi-Temporal Remote Sensing Imagery

Abstract
1. Introduction
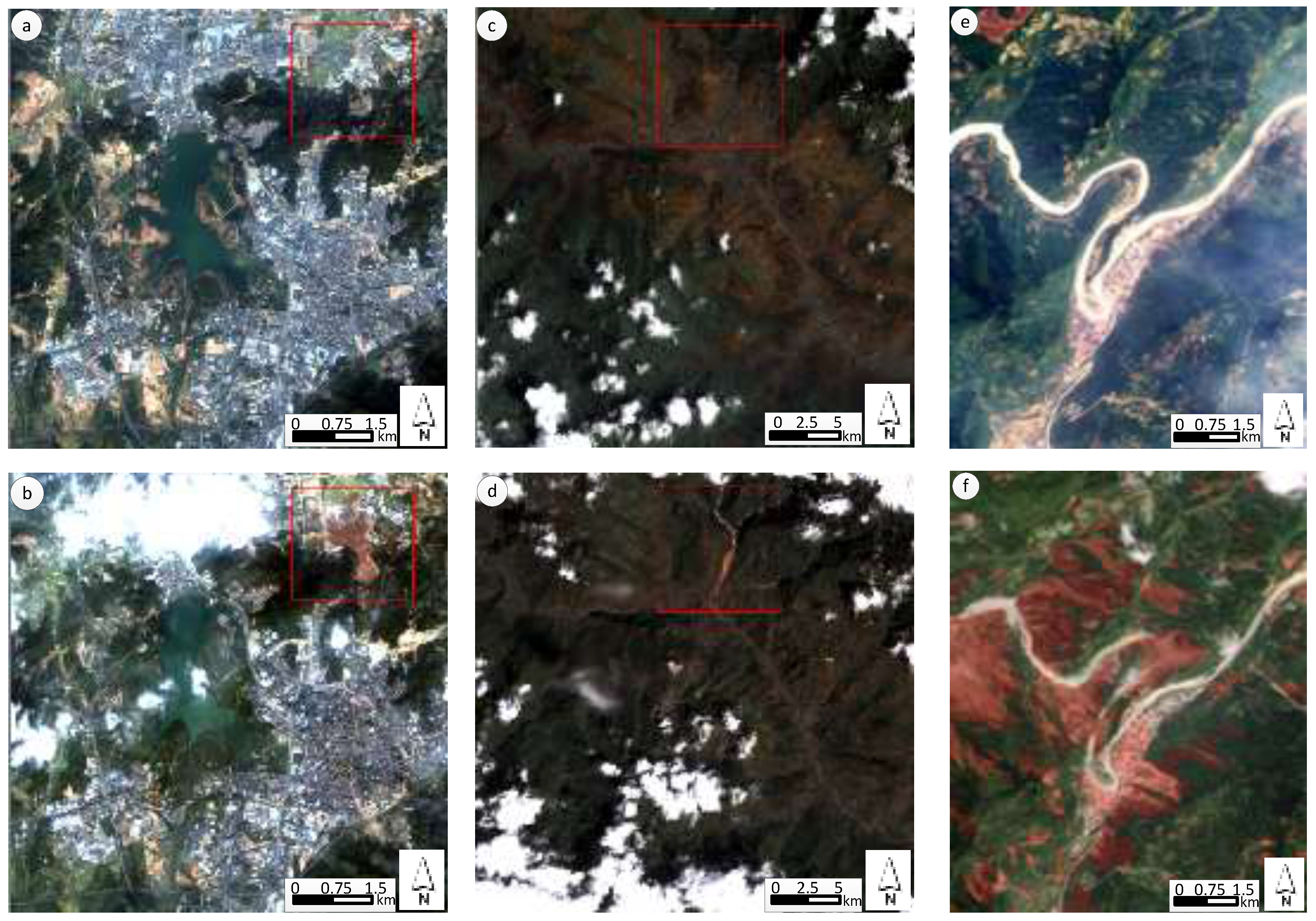
2. Study Area and Data
3. Methodology
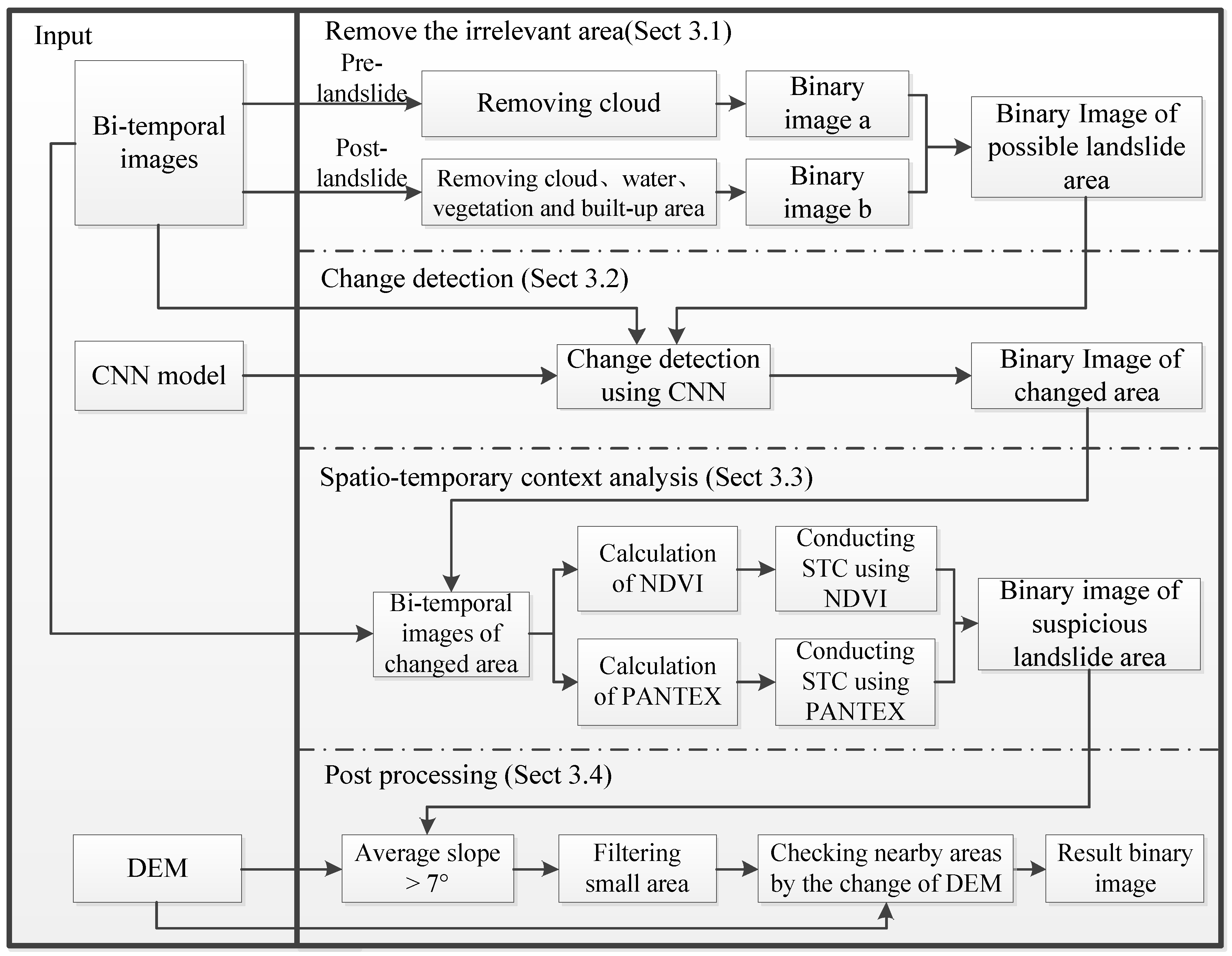
- Cloud-covered regions ought to be abandoned in all images. Unconcerned regions with vegetation, water and building are also supposed to be discarded in the post-event image, then the possible landslide areas are obtained (Section 3.1).
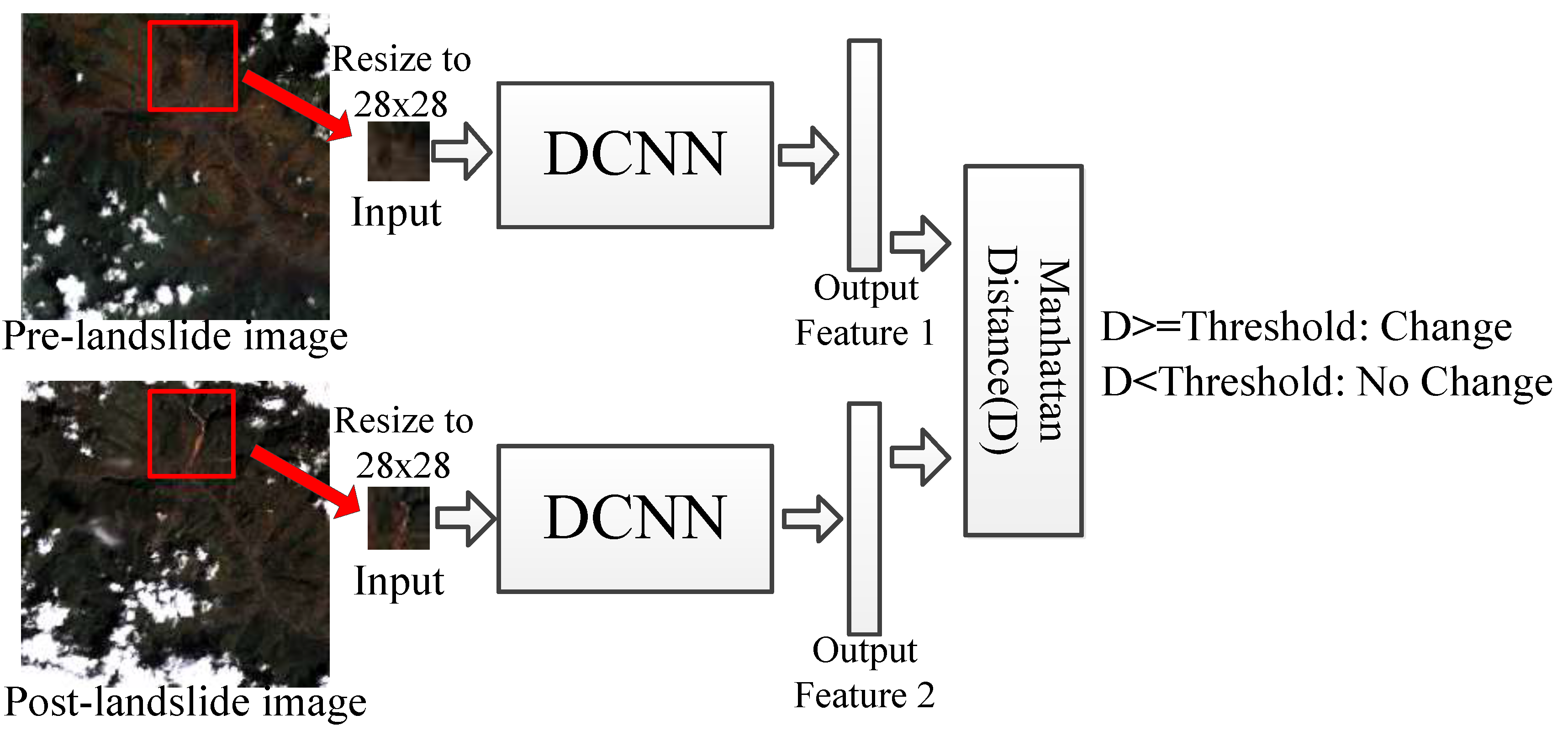
- Extract changed areas by applying change detection with Deep Convolution Neural Network to pre- and post-event images (Section 3.2).
- STCL aiming at binary temporal NDVI and PANTEX in changed areas is used and the suspicious landslide areas is extracted (Section 3.3).
- The post process is added to get more reliable and complete landslide areas (Section 3.4).
3.1. Remove the Irrelevant Areas
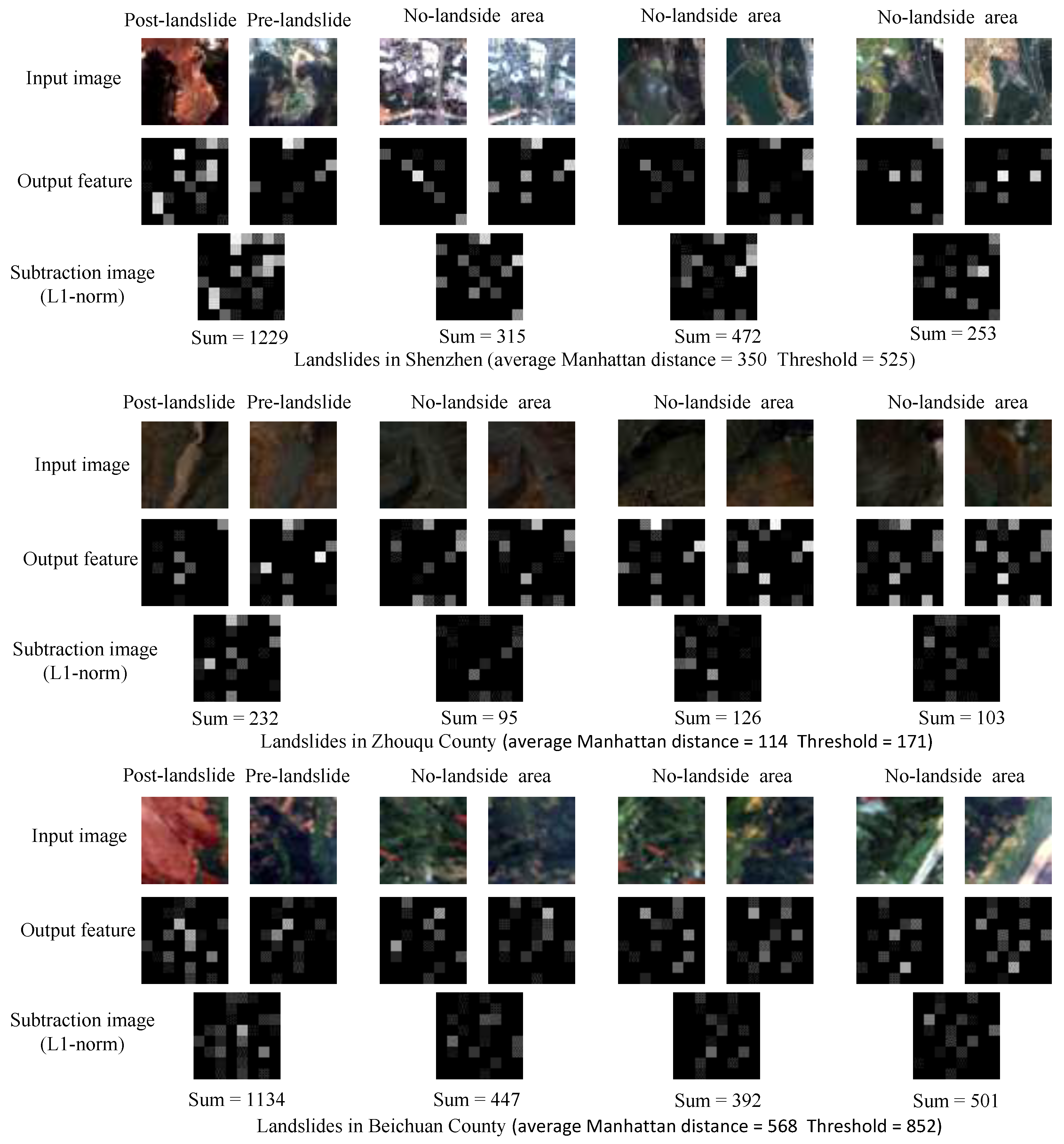
3.2. Change Detection Using DCNN
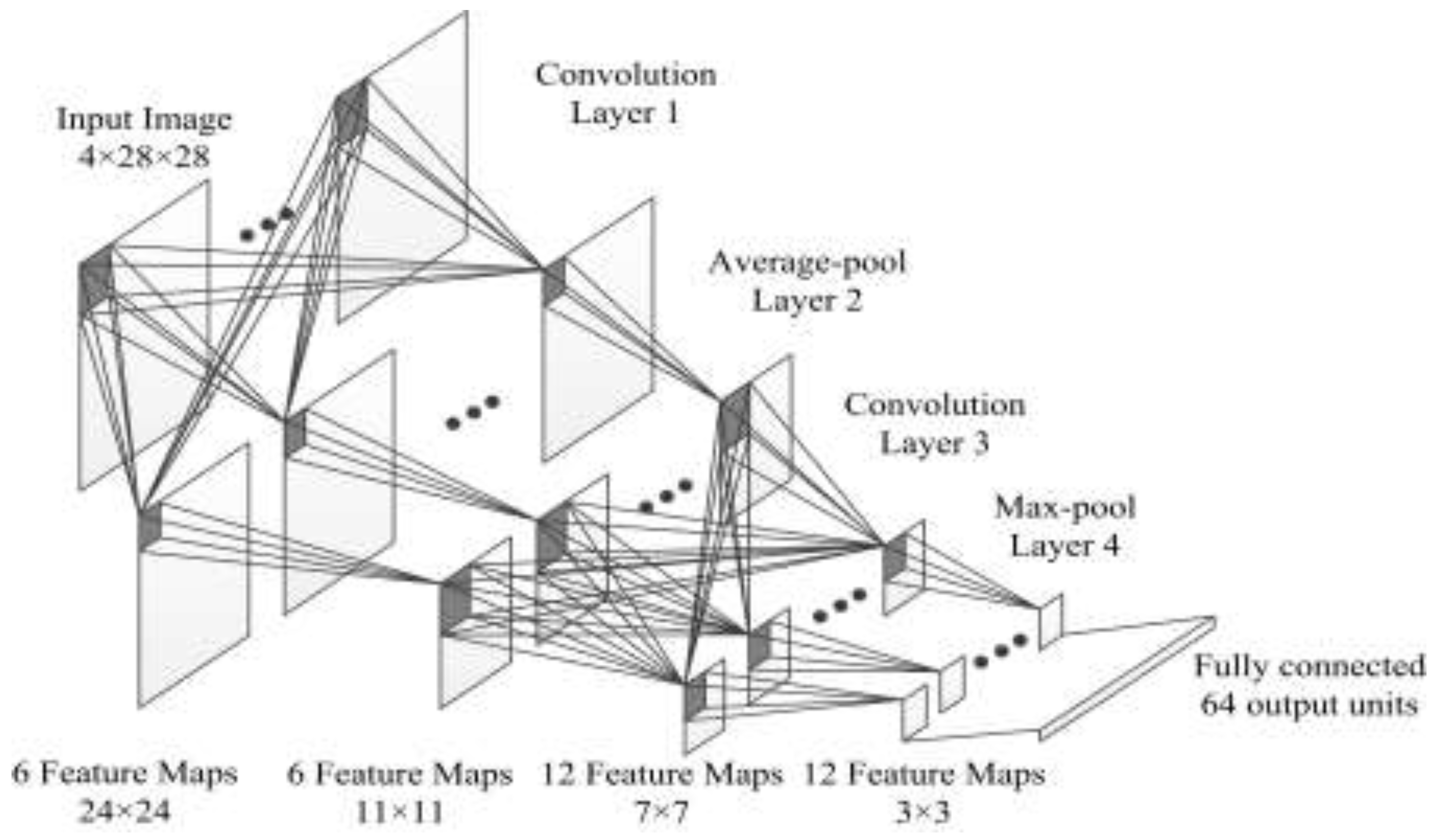
3.2.1. Feature Extraction
3.2.2. Change Detection
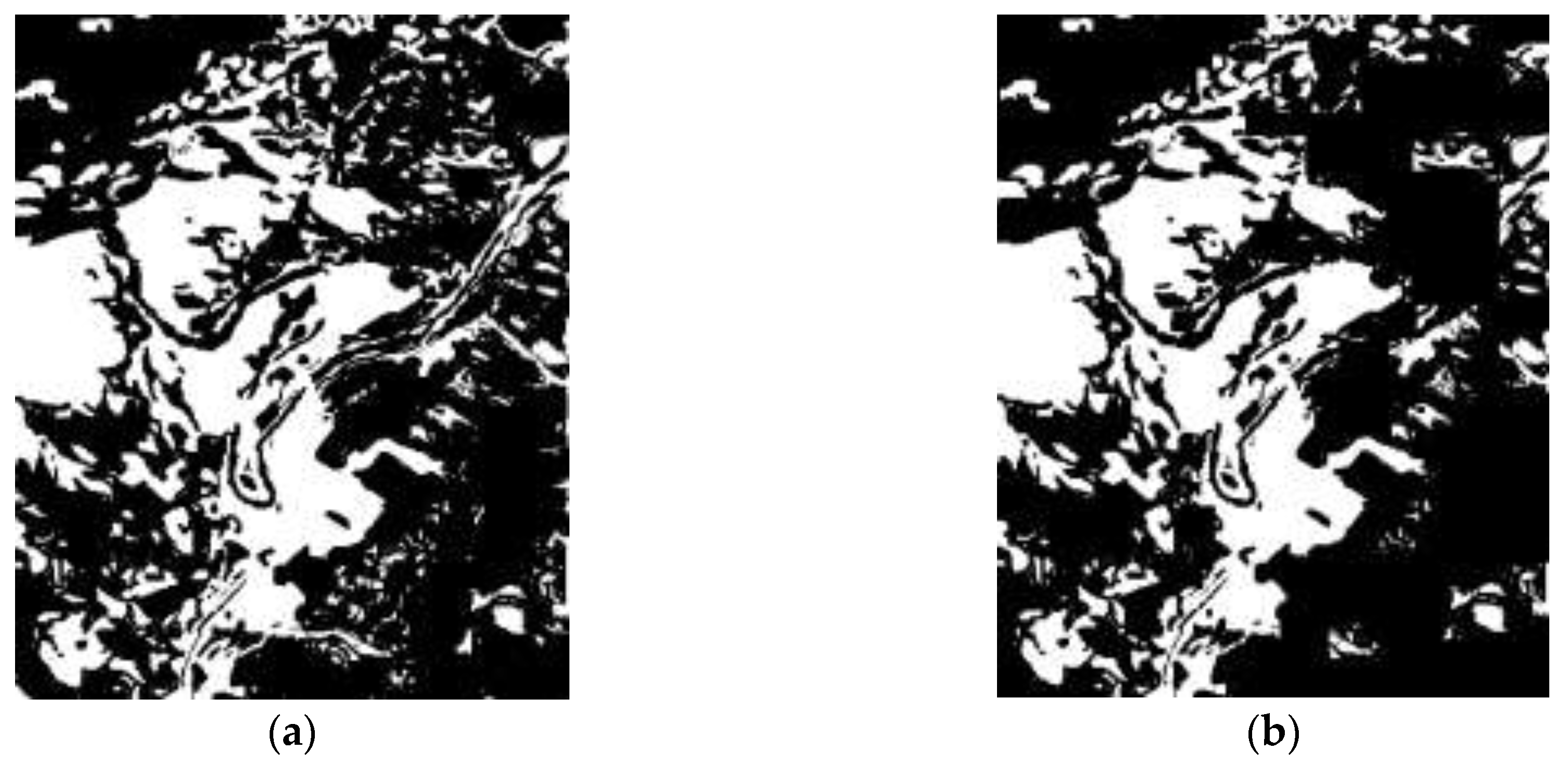
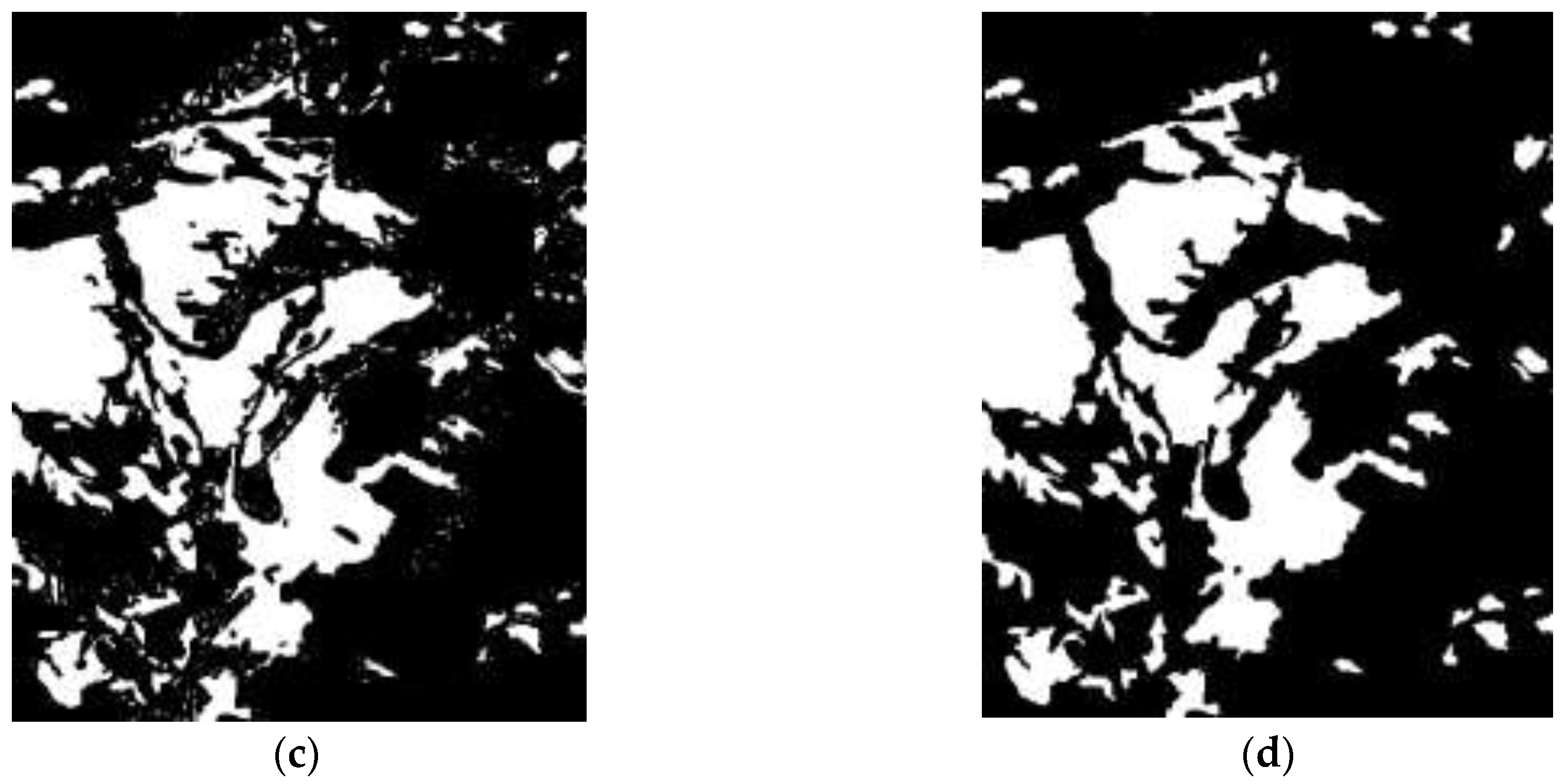
3.3. Spatial Temporal Context Analysis
3.3.1. Spatial Context Modeling
3.3.2. Temporary Confidence Learning
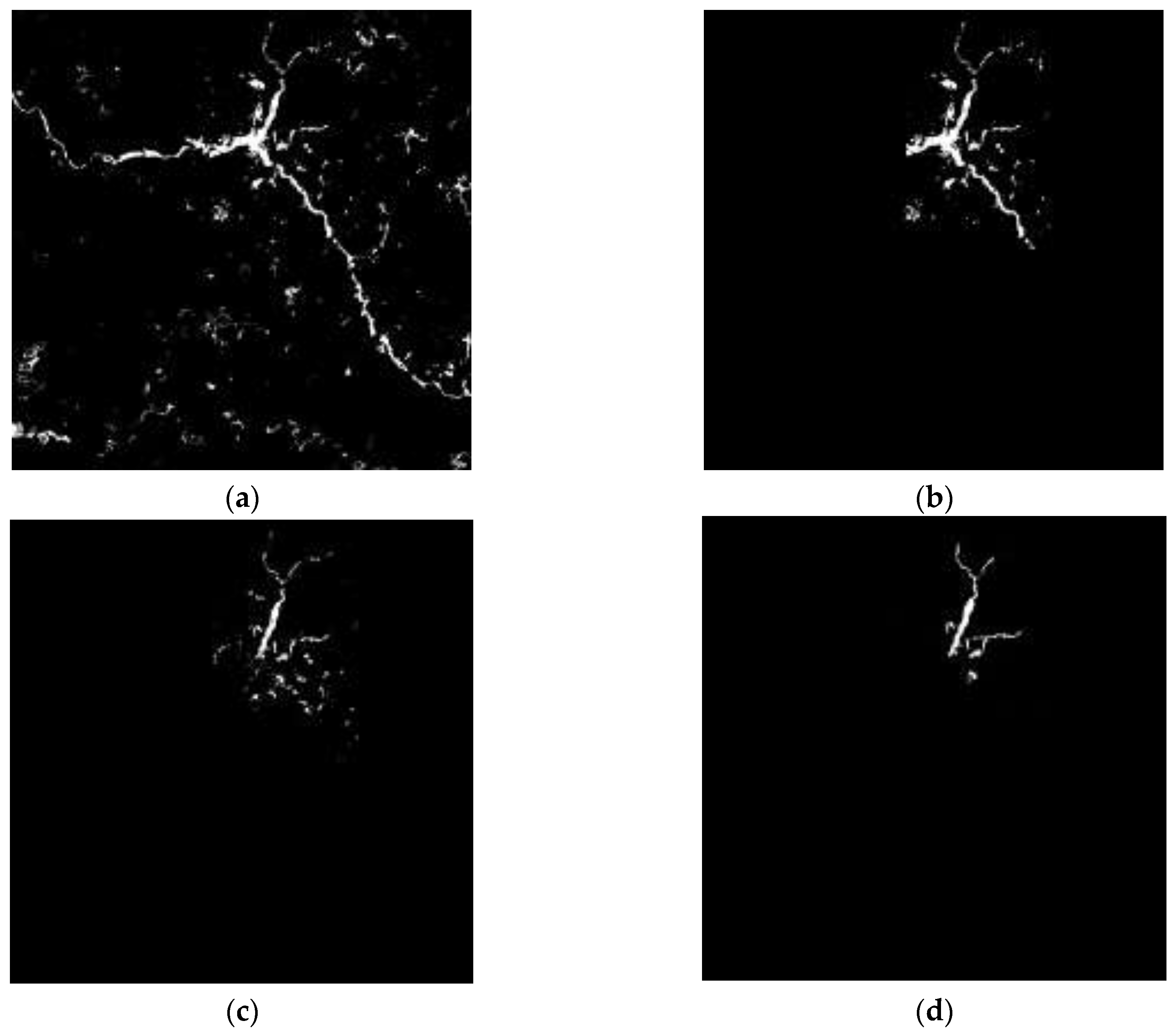
3.4. Post Processing
4. Result and Discussion
4.1. Experiment Result
4.2. Accuracy Assessment
4.3. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Keefer, D.K.; Larsen, M.C. Assessing landslide hazards. Science 2007, 316, 1136–1138. [Google Scholar] [CrossRef] [PubMed]
- Yin, Y.; Wang, F.; Sun, P. Landslide hazards triggered by the 2008 Wenchuan earthquake, Sichuan, China. Landslides 2009, 6, 139–152. [Google Scholar] [CrossRef]
- Westen, C.J.V.; Castellanos, E.; Kuriakose, S.L. Spatial data for landslide susceptibility, hazard, and vulnerability assessment: An overview. Eng. Geol. 2008, 102, 112–131. [Google Scholar] [CrossRef]
- KhairunnizaBejo, S.; Petrou, M.; Ganas, A. Local similarity measure for landslide detection and identification in comparison with the image differencing method. Int. J. Remote Sens. 2010, 31, 6033–6045. [Google Scholar] [CrossRef]
- Cheng, G.; Guo, L.; Zhao, T.; Han, J.; Li, H.; Fang, J. Automatic landslide detection from remote-sensing imagery using a scene classification method based on BoVW and pLSA. Int. J. Remote Sens. 2013, 34, 45–59. [Google Scholar] [CrossRef]
- Rau, J.Y.; Jhan, J.P.; Rau, R.J. Semiautomatic object-oriented landslide recognition scheme from multisensor optical imagery and DEM. IEEE Trans. Geosci. Remote Sens. 2014, 52, 1336–1349. [Google Scholar] [CrossRef]
- Aksoy, B.; Ercanoglu, M. Landslide identification and classification by object-based image analysis and fuzzy logic: An example from the Azdavay region (Kastamonu, Turkey). Comput. Geosci. 2012, 38, 87–98. [Google Scholar] [CrossRef]
- Mondini, A.C.; Marchesini, I.; Rossi, M.; Chang, K.T.; Pasquariello, G.; Guzzeti, F. Bayesian framework for mapping and classifying shallow landslides exploiting remote sensing and topographic data. Geomorphology 2013, 201, 135–147. [Google Scholar] [CrossRef]
- Chang, Y.L.; Liang, L.S.; Han, C.C.; Fang, J.P.; Liang, W.Y.; Chen, K.S. Multisource data fusion for landslide classification using generalized positive Boolean functions. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1697–1708. [Google Scholar] [CrossRef]
- Pradhan, B.; Lee, S. Delineation of landslide hazard areas on Penang Island, Malaysia, by using frequency ratio, logistic regression, and artificial neural network models. Environ. Earth Sci. 2010, 60, 1037–1054. [Google Scholar] [CrossRef]
- Lee, S.; Lee, M.J. Detecting landslide location using KOMPSAT 1 and its application to landslide-susceptibility mapping at the Gangneung area, Korea. Adv. Space Res. 2006, 38, 2261–2271. [Google Scholar] [CrossRef]
- Hervás, J.; Barredo, J.I.; Rosin, P.L.; Pasuto, A.; Mantovani, F.; Silvano, S. Monitoring landslides from optical remotely sensed imagery: The case history of Tessina landslide, Italy. Geomorphology 2003, 54, 63–75. [Google Scholar] [CrossRef]
- Lacroix, P.; Zavala, B.; Berthier, E.; Audin, L. Supervised method of landslide inventory using panchromatic SPOT5 images and application to the earthquake-triggered landslides of Pisco (Peru, 2007, Mw8. 0). Remote Sens. 2013, 5, 2590–2616. [Google Scholar] [CrossRef]
- Pascale, S.; Pastore, V.; Sdao, F.; Sole, A.; Roubis, D.; Lorenzo, P. Use of remote sensing data for landslide change detection: Montescaglioso large landslide (Basilicata, southern Italy). Int. J. Agric. Environ. Inf. Syst. 2012, 3, 14–25. [Google Scholar] [CrossRef]
- Mondini, A.C.; Guzzetti, F.; Reichenbach, P.; Rossi, M.; Cardinali, M.; Ardizzone, F. Semi-automatic recognition and mapping of rainfall induced shallow landslides using opticalsatellite images. Remote Sens. Environ. 2011, 115, 1743–1757. [Google Scholar] [CrossRef]
- Martha, T.R.; Kerle, N.; Westen, C.J.V.; Jetten, V.; Kumar, K.V. Object-oriented analysis of multi-temporal panchromatic images for creation of historical landslide inventories. ISPRS J. Photogramm. Remote Sens. 2012, 67, 105–119. [Google Scholar] [CrossRef]
- Behling, R.; Roessner, S.; Kaufmann, H.; Kleinschmit, B. Automated spatiotemporal landslide mapping over large areas using rapideye time series data. Remote Sens. 2014, 6, 8026–8055. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. Imagenet classification with deep convolutional neural networks. Adv. Neural Inf. Process. Syst. 2012, 25, 1097–1105. [Google Scholar] [CrossRef]
- Sa, I.; Ge, Z.; Dayoub, F.; Upcroft, B.; Perez, T.; McCool, C. DeepFruits: A Fruit Detection System Using Deep Neural Networks. Sensors 2016, 16, 1222. [Google Scholar] [CrossRef] [PubMed]
- Collobert, R.; Weston, J. A unified architecture for natural language processing: Deep neural networks with multitask learning. In Proceedings of the 25th International Conference on Machine Learning, Helsinki, Finland, 5–9 July 2008; pp. 160–167. [Google Scholar]
- Deng, L.; Hinton, G.; Kingsbury, B. New types of deep neural network learning for speech recognition and related applications: An overview. In Proceedings of the 38th IEEE International Conference on Acoustics, Speech, and Signal Processing, Vancouver, BC, Canada, 26–31 May 2013; pp. 8599–8603. [Google Scholar]
- Zhang, K.; Zhang, L.; Yang, M.H.; Zhang, D. Fast tracking via spatio-temporal context learning. In Proceedings of the 13rd European Conference on Computer Vision, Zurich, Switzerland, 6–12 September 2014; pp. 127–141. [Google Scholar]
- Pesaresi, M.; Gerhardinger, A.; Kayitakire, F. A robust built-up area presence index by anisotropic rotation-invariant textural measure. IEEE J. Sel. Top. Appl. Earth Obs. 2008, 1, 180–192. [Google Scholar] [CrossRef]
- Behling, R.; Roessner, S.; Segl, K.; Kleinschmit, B.; Kaufmann, H. Robust automated image co-registration of optical multi-sensor time series data: Database generation for multi-temporal landslide detection. Remote Sens. 2014, 6, 2572–2600. [Google Scholar] [CrossRef]
- Cheng, K.S.; Wei, C.; Chang, S.C. Locating landslides using multi-temporal satellite images. Adv. Space Res. 2004, 33, 296–301. [Google Scholar] [CrossRef]
- Cruden, D.M.; Varnes, D.J. Landslide types and processes. In Landslides Investigation and Mitigation; Transportation Research Board, Special Report 247; Turner, A.K., Schuster, R.L., Eds.; National Academy Press: Washington, DC, USA, 1996; pp. 36–75. ISBN 030906208X. [Google Scholar]
- Rouse, J.W.; Haas, R.H.; Schnell, J.A.; Deering, D.W. Monitoring the Vernal Advancement and Retrogradation of Natural Vegetation; NASA/GSFC Type II Progress Report; NASA: Greenbelt, MD, USA, 1973.
- McFeeters, S.K. The use of the normalized difference water index (NDWI) in the delineation of open water features. Int. J. Remote Sens. 1996, 17, 1425–1432. [Google Scholar] [CrossRef]
- Bluche, T.; Ney, H.; Kermorvant, C. Feature Extraction with Convolutional Neural Networks for Handwritten Word Recognition. In Proceedings of the 20th international Conference on Document Analysis and Recognition, Washington, DC, USA, 25–28 August 2013; pp. 285–289. [Google Scholar]
- Zhao, W.; Du, S. Learning multiscale and deep representations for classifying remotely sensed imagery. ISPRS J. Photogramm. Remote Sens. 2016, 113, 155–165. [Google Scholar] [CrossRef]
- Basu, S.; Ganguly, S.; Mukhopadhyay, S.; Dibiano, R.; Karki, M.; Nemani, R. Deepsat—A learning framework for satellite imagery. In Proceedings of the 23rd ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems, New York, NY, USA, 3–6 November 2015. [Google Scholar]
- Hölbling, D.; Füreder, P.; Antolini, F.; Cigna, F.; Casagli, N.; Lang, S. A semi-automated object-based approach for landslide detection validated by persistent scatterer interferometry measures and landslide inventories. Remote Sens. 2012, 4, 1310–1336. [Google Scholar] [CrossRef]
- Barlow, J.; Franklin, S. High spatial resolution satellite imagery, dem derivatives, and image segmentation for the detection of mass wasting processes. Photogramm. Eng. Remote Sens. 2006, 72, 687–692. [Google Scholar] [CrossRef]
- Lu, P.; Stumpf, A.; Kerle, N.; Casagli, N. Object-oriented change detection for landslide rapid mapping. IEEE Geosci. Remote Sens. Lett. 2011, 8, 701–705. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Validation Site | Number of TPs | Number of FPs | Number of FNs | DP (%) | QP (%) | CE (%) |
|---|---|---|---|---|---|---|
| Shenzhen | 7543 | 832 | 1898 | 79.9 | 73.4 | 9.9 |
| Zhouqu | 2953 | 630 | 1247 | 70.3 | 61.1 | 17.6 |
| Beichuan | 40466 | 4315 | 5237 | 88.5 | 80.1 | 9.6 |
| Validation Site | Number of TP Areas | Number of FP Areas | Number of FN Areas | DP (%) | QP (%) | CE (%) |
|---|---|---|---|---|---|---|
| Shenzhen | 5 | 2 | 0 | 100 | 71.4 | 28.6 |
| Zhouqu | 4 | 2 | 0 | 100 | 66.7 | 33.3 |
| Beichuan | 48 | 3 | 11 | 81 | 77.4 | 5.9 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Z.; Zhang, Y.; Ouyang, C.; Zhang, F.; Ma, J. Automated Landslides Detection for Mountain Cities Using Multi-Temporal Remote Sensing Imagery. Sensors 2018, 18, 821. https://doi.org/10.3390/s18030821
Chen Z, Zhang Y, Ouyang C, Zhang F, Ma J. Automated Landslides Detection for Mountain Cities Using Multi-Temporal Remote Sensing Imagery. Sensors. 2018; 18(3):821. https://doi.org/10.3390/s18030821
Chicago/Turabian StyleChen, Zhong, Yifei Zhang, Chao Ouyang, Feng Zhang, and Jie Ma. 2018. "Automated Landslides Detection for Mountain Cities Using Multi-Temporal Remote Sensing Imagery" Sensors 18, no. 3: 821. https://doi.org/10.3390/s18030821
APA StyleChen, Z., Zhang, Y., Ouyang, C., Zhang, F., & Ma, J. (2018). Automated Landslides Detection for Mountain Cities Using Multi-Temporal Remote Sensing Imagery. Sensors, 18(3), 821. https://doi.org/10.3390/s18030821