A Quadruped Micro-Robot Based on Piezoelectric Driving

Abstract
:1. Introduction
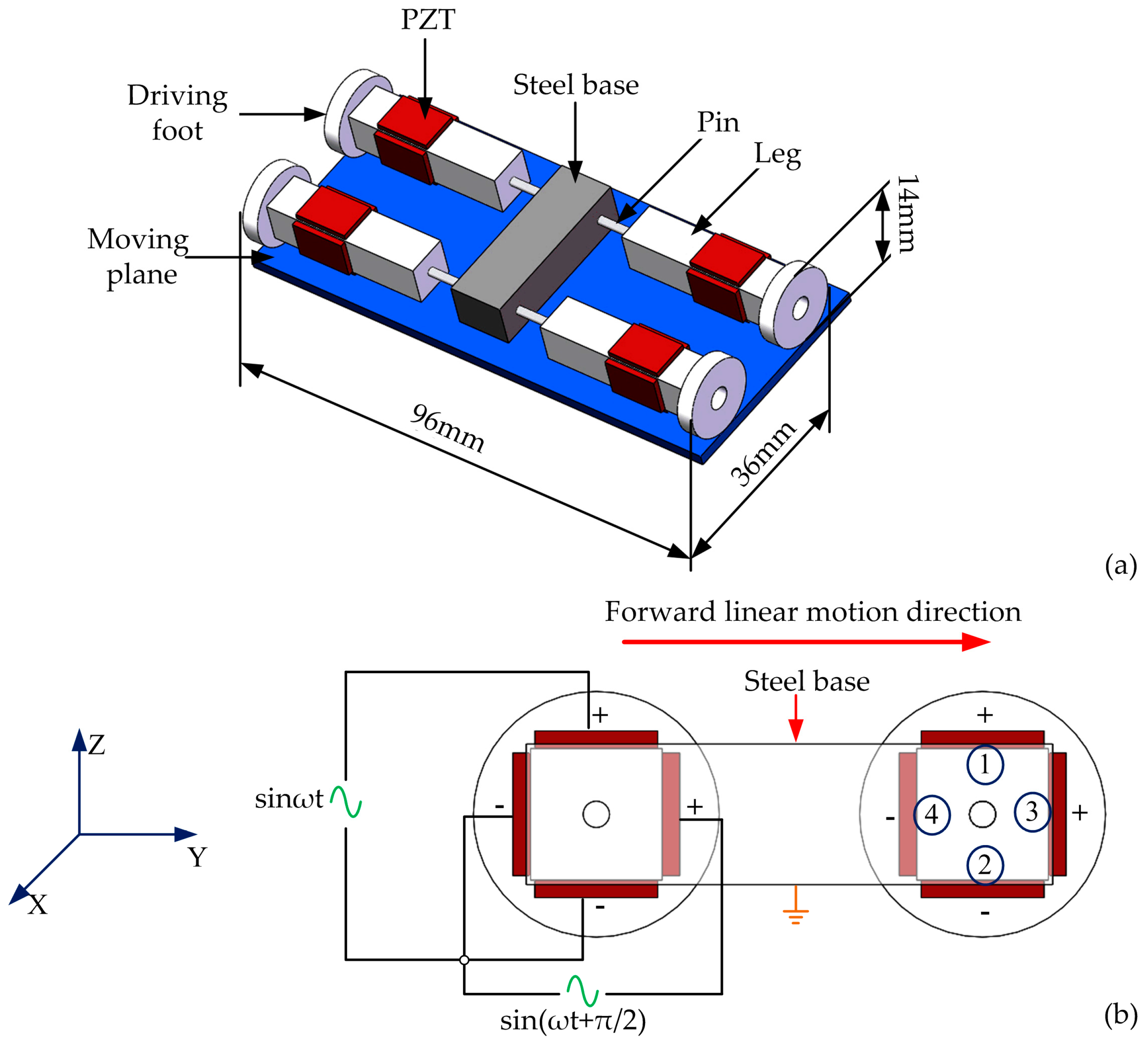
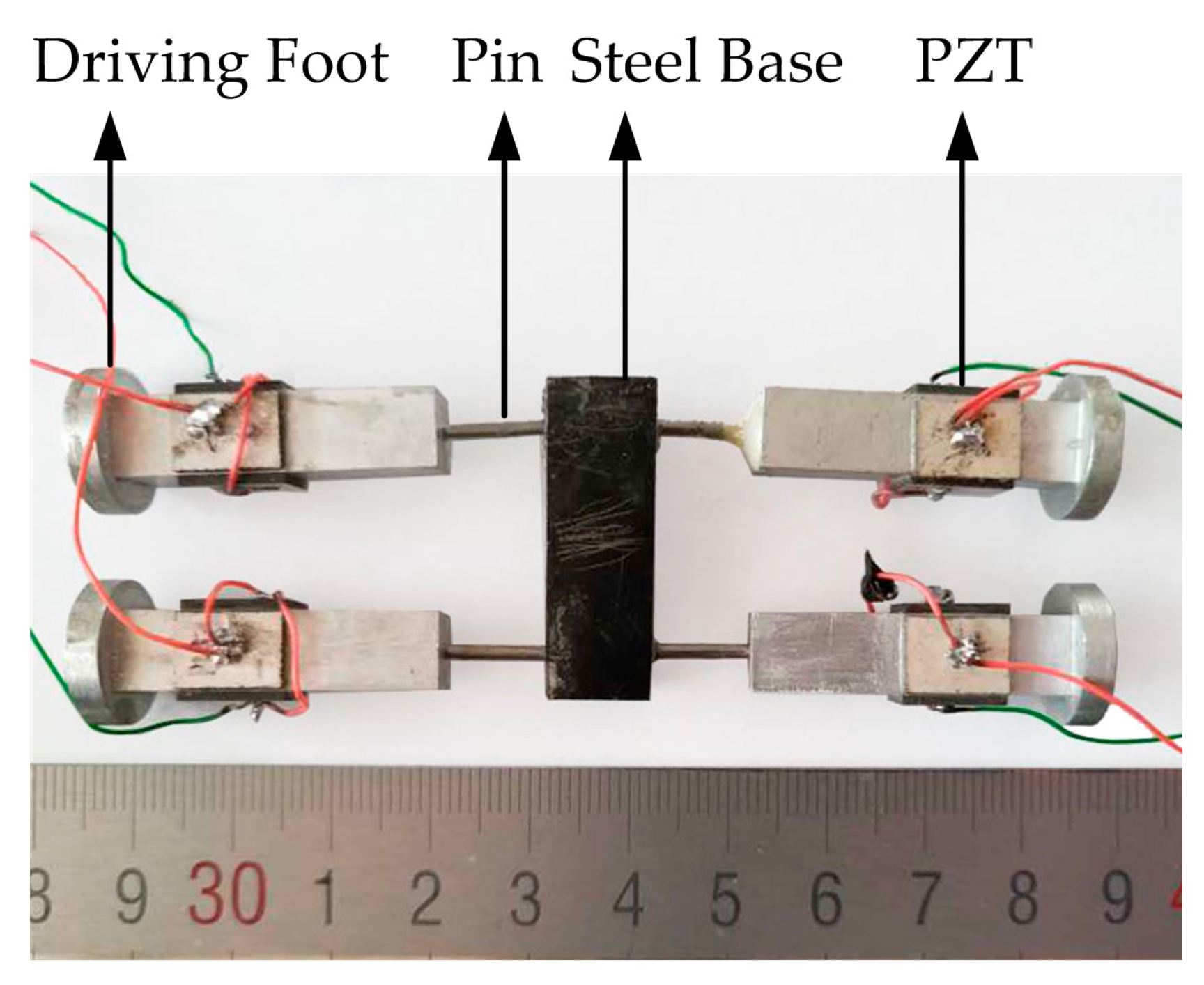
2. Structure and Operating Principle
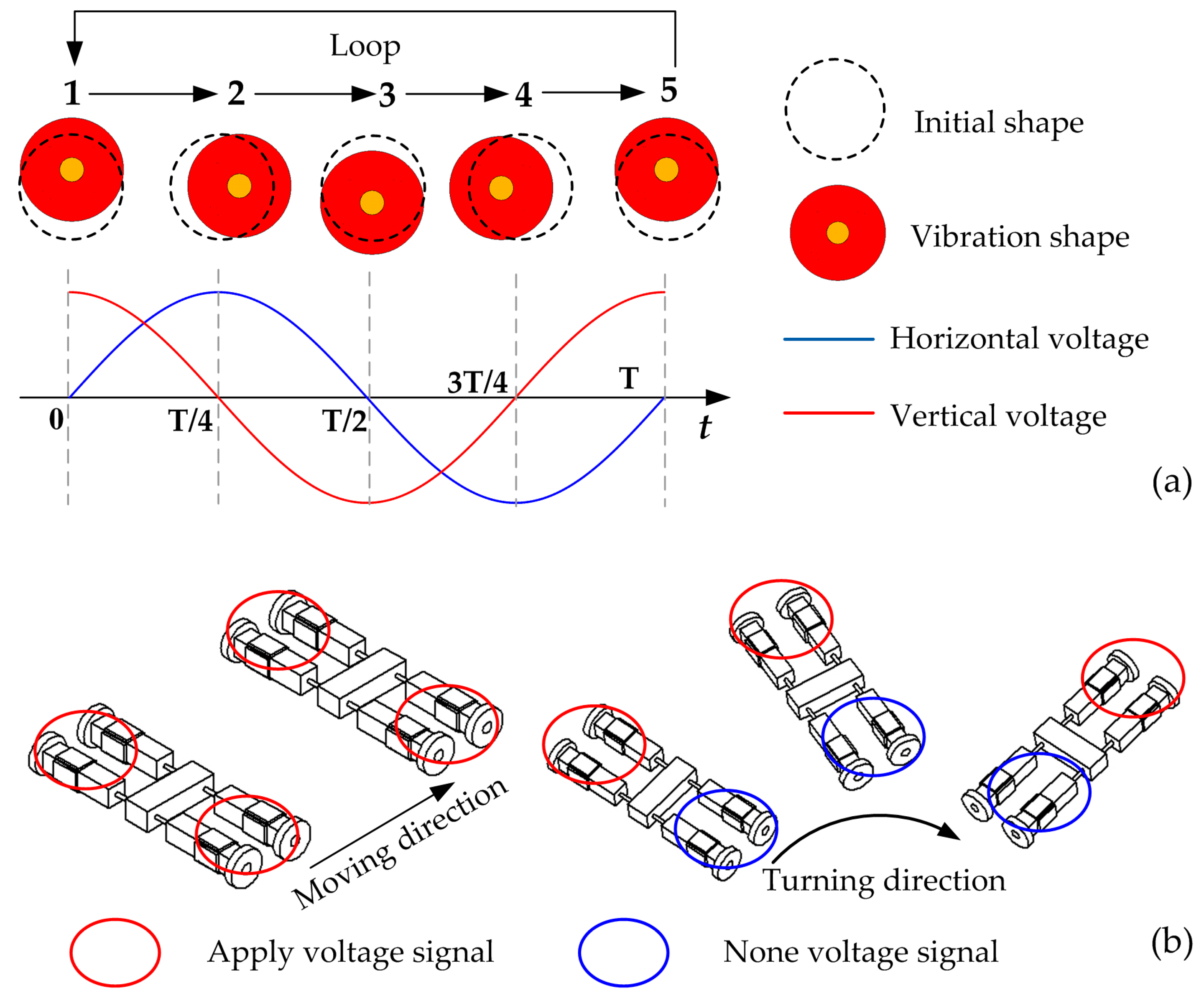
- In the 0 to T/4 interval, the leg bends downwards and forwards at the same time. It reaches the front end at time of T/2.
- The leg bends backwards and downwards when the exciting signal goes into next interval (T/4–T/2). It reaches the front end at time of T/2. In this interval, the driving foot keeps contact with the ground and reaches the lowest position at time of T/2.
- In this step, the leg bends upwards and backwards, and it gradually separates from the ground. The friction force between driving foot and ground gradually decreases, and it completely disappears at time of 3T/4.
- In this step, the leg bends upwards and forwards and reaches the highest position at time of T. In addition, a driving loop has been completed.
3. FEM Analyses
3.1. Material Selection and Parameters
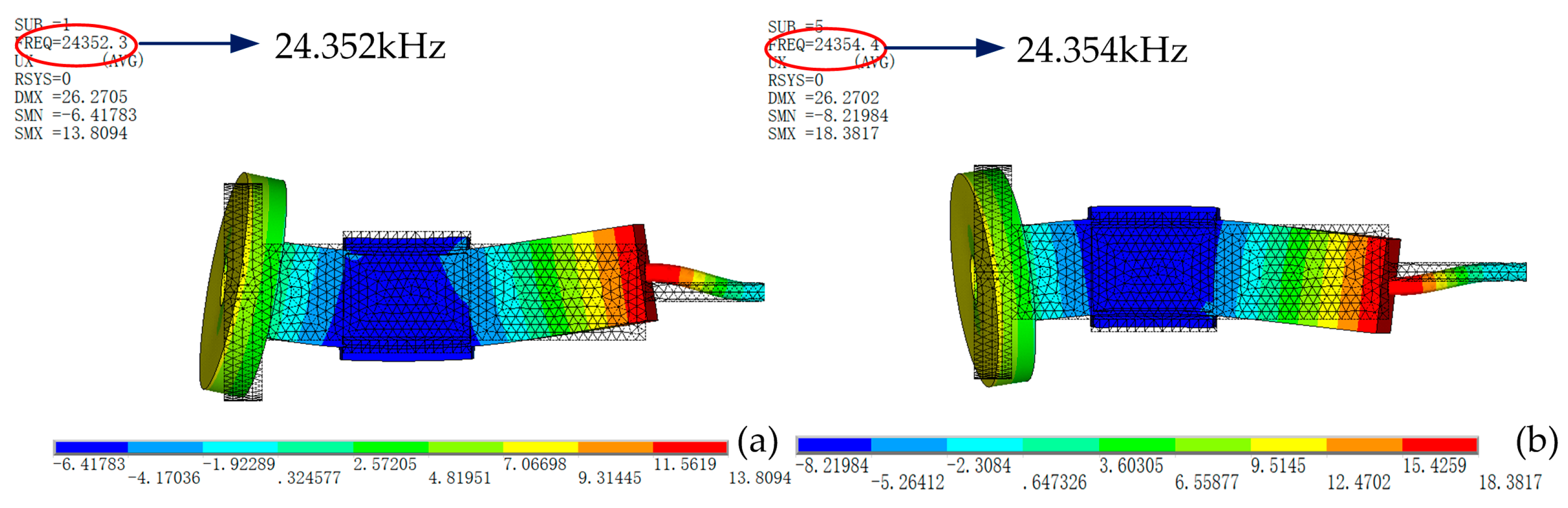
3.2. Modal and Transient Analysis
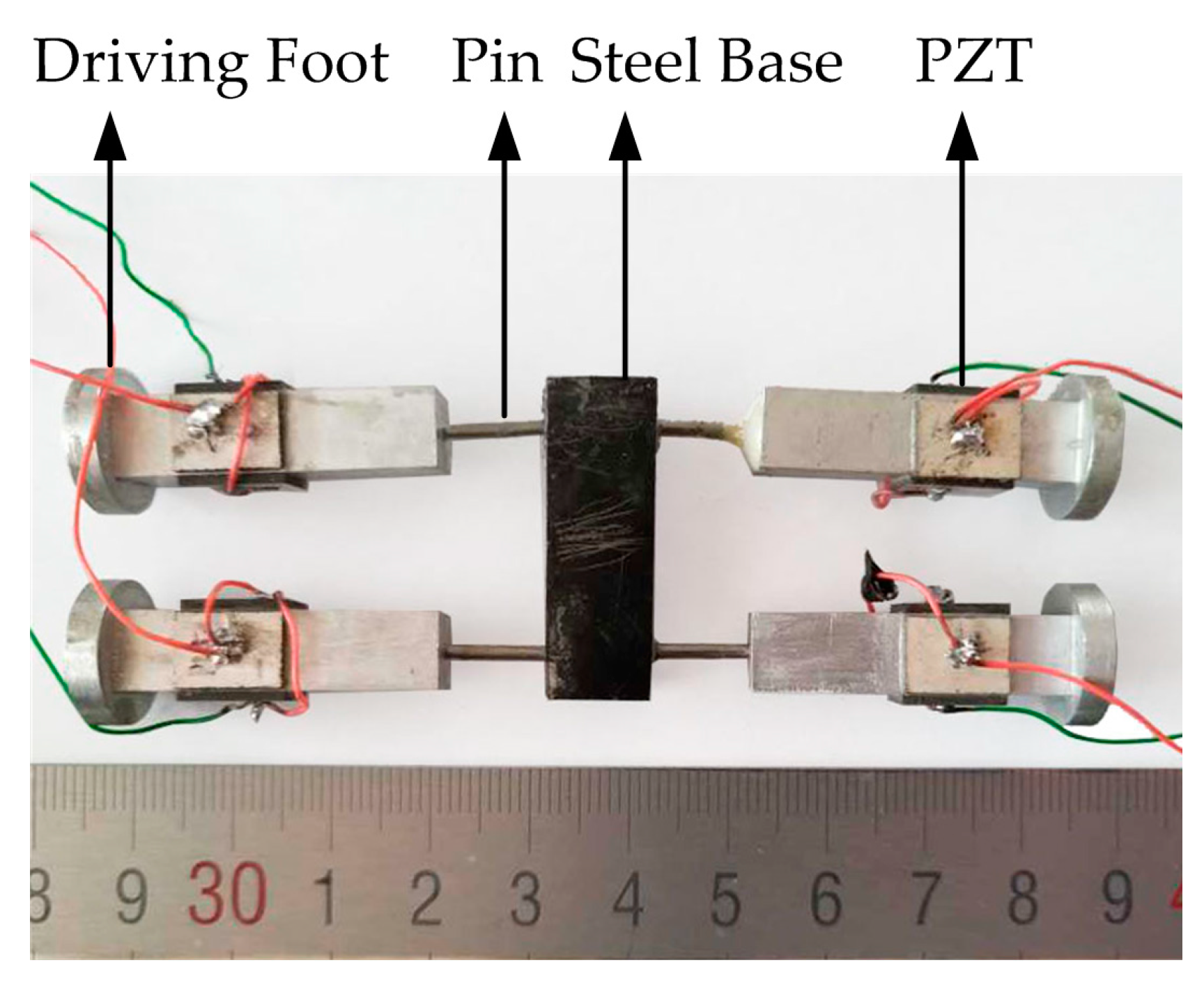
4. Experiment
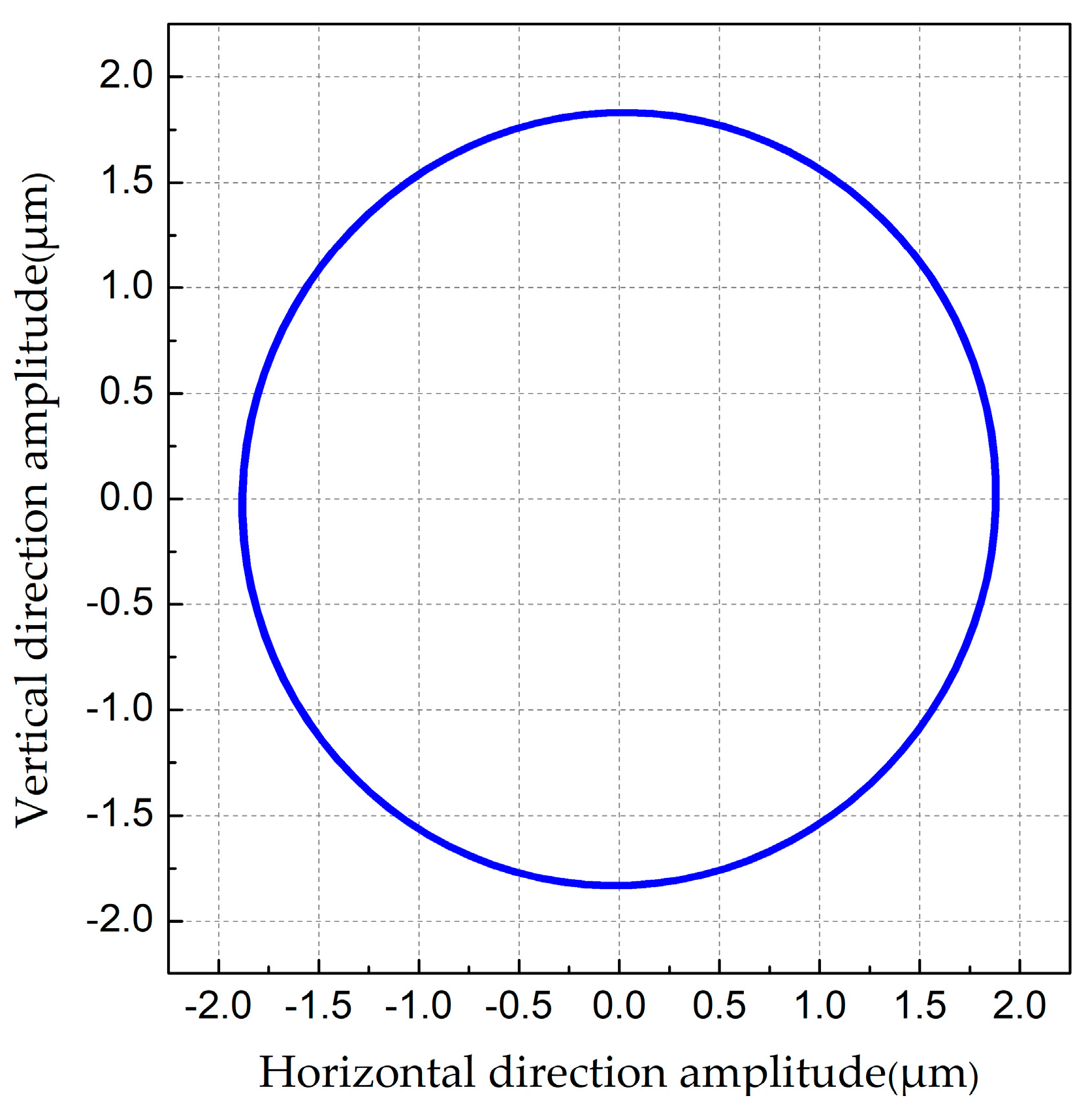
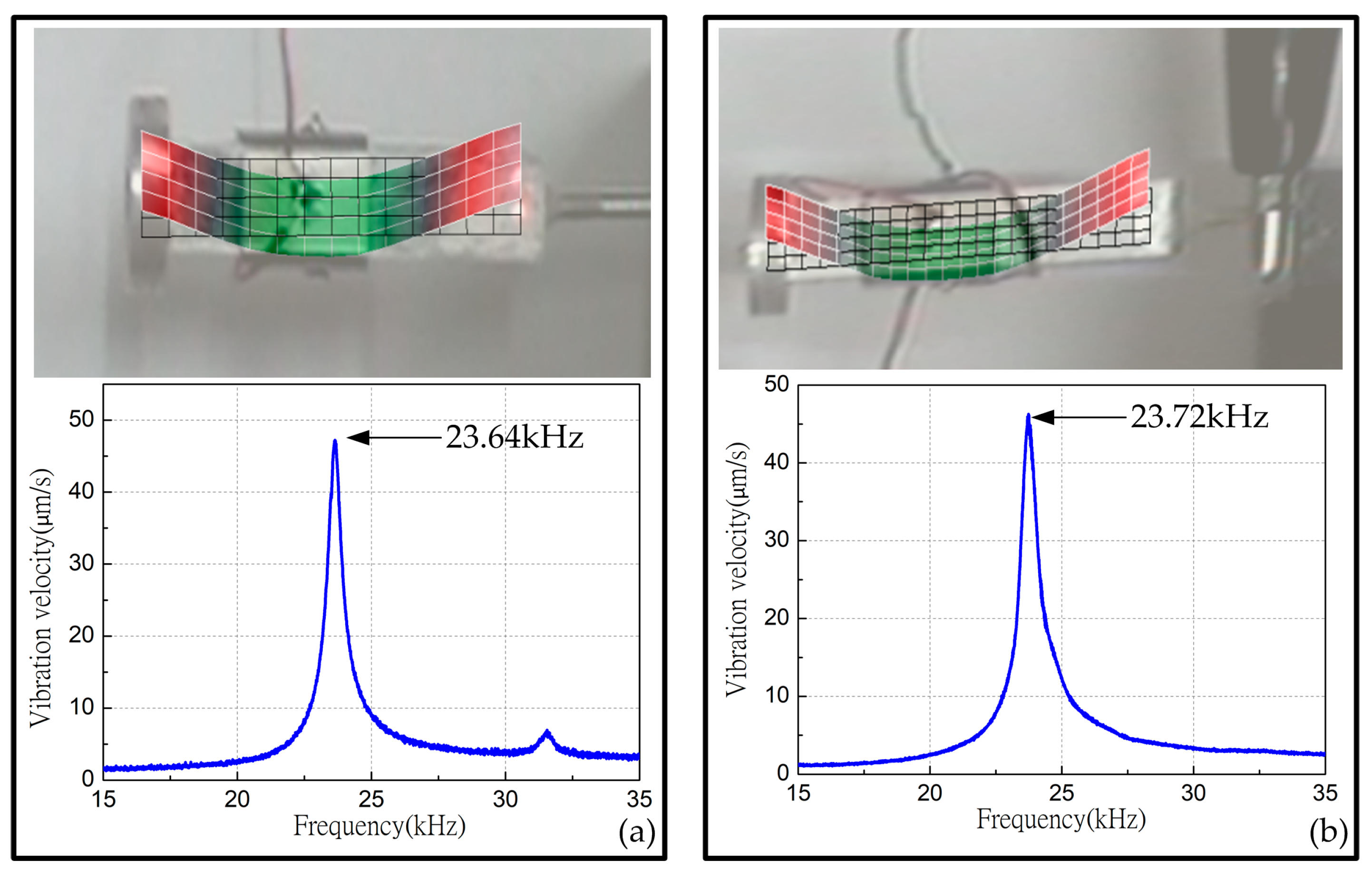
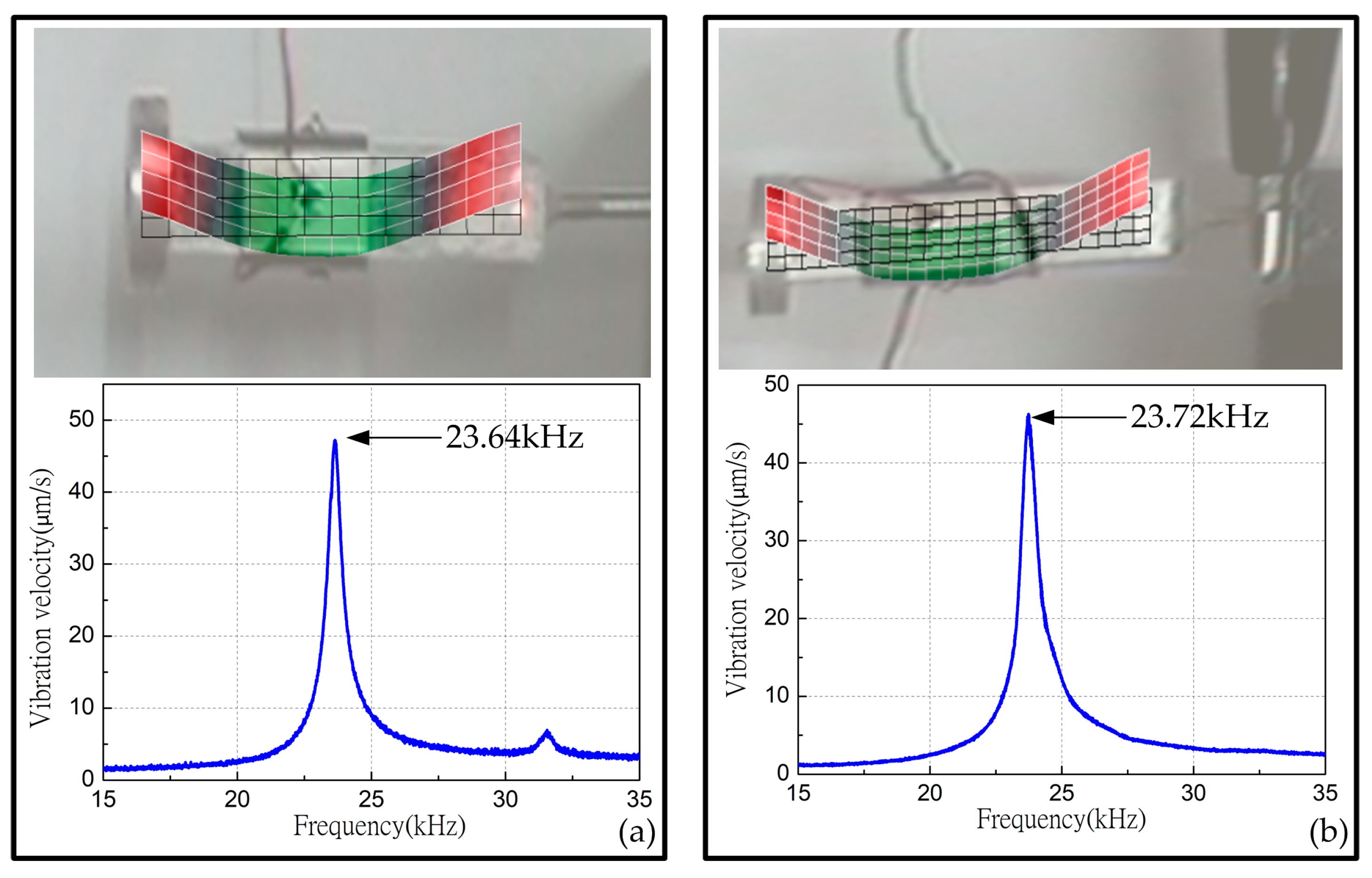
4.1. Vibration Analysis of Laser Measurement
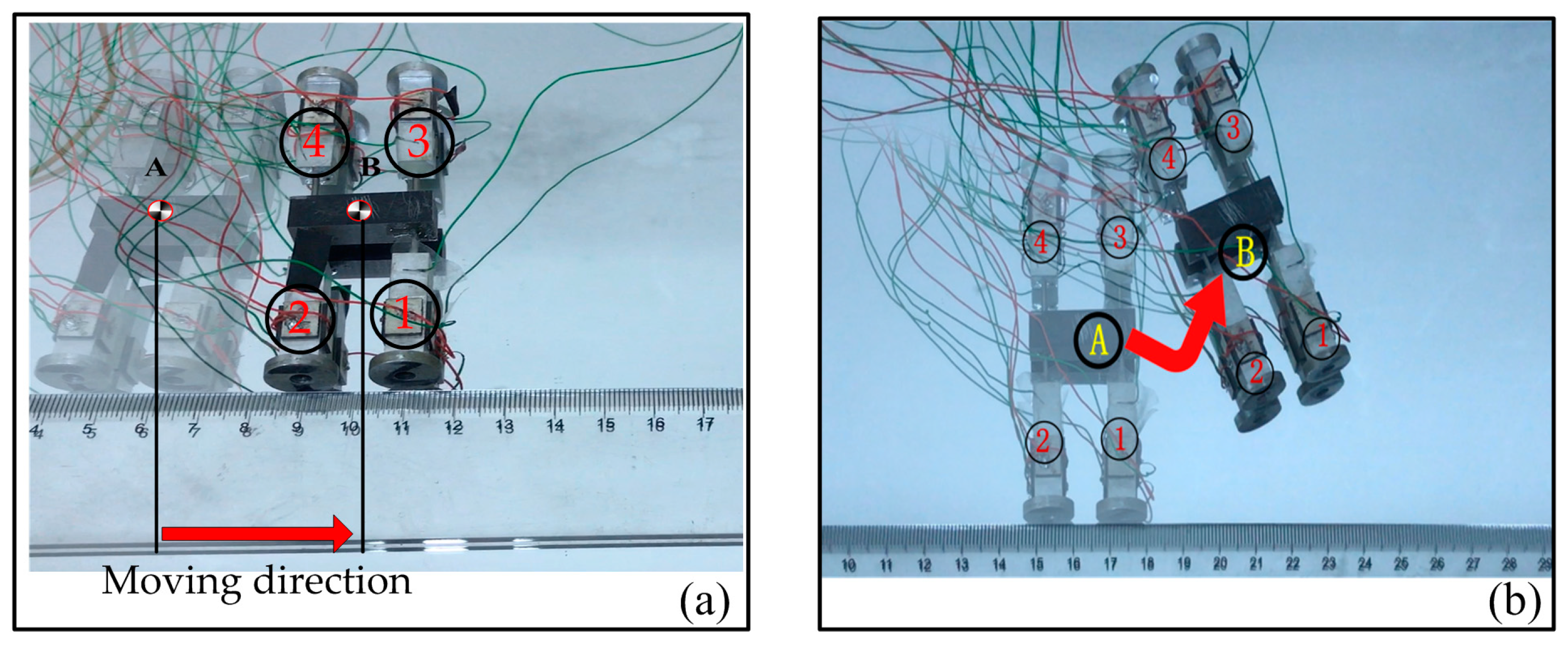
4.2. Experiment of Linear Motion and Turning Motion
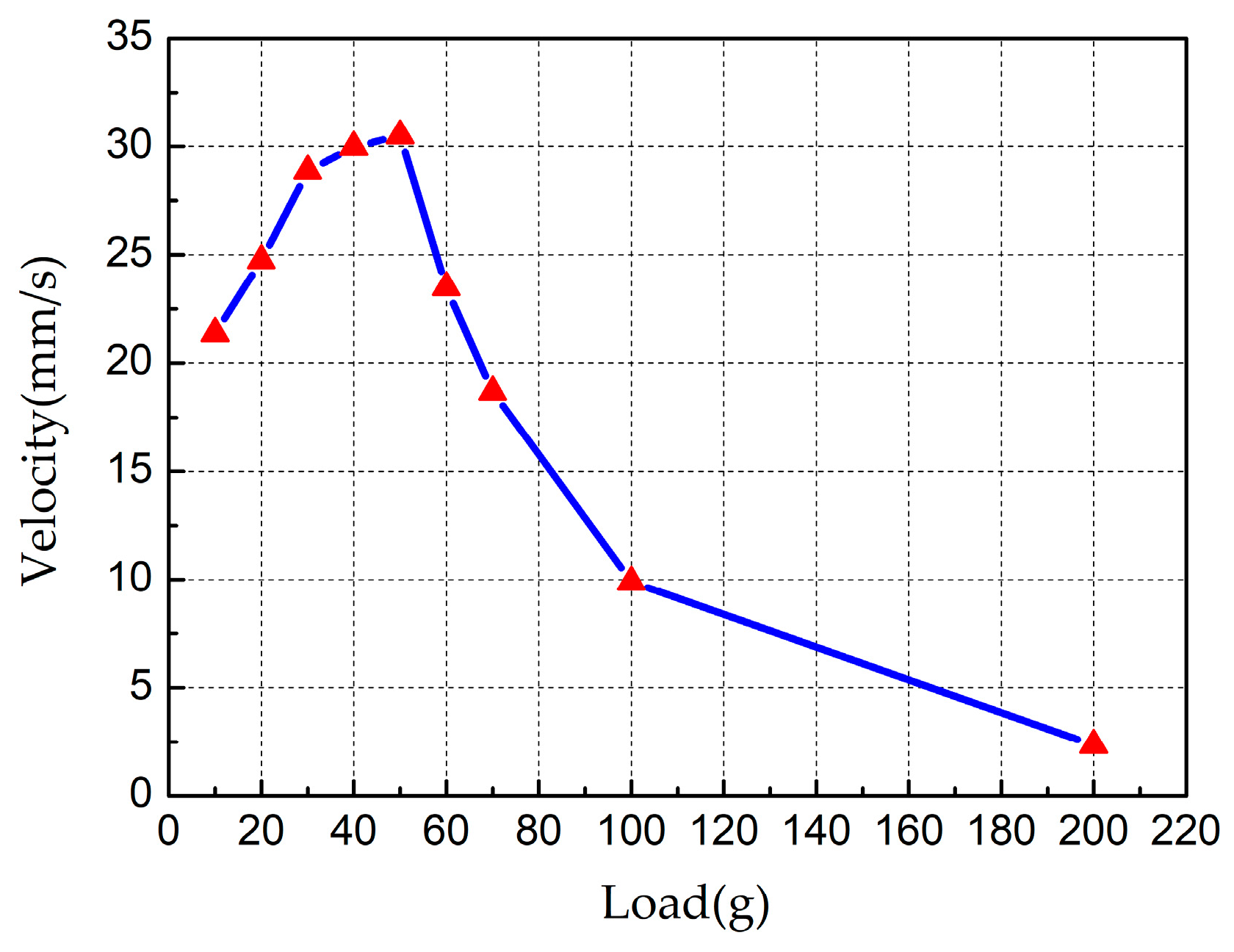
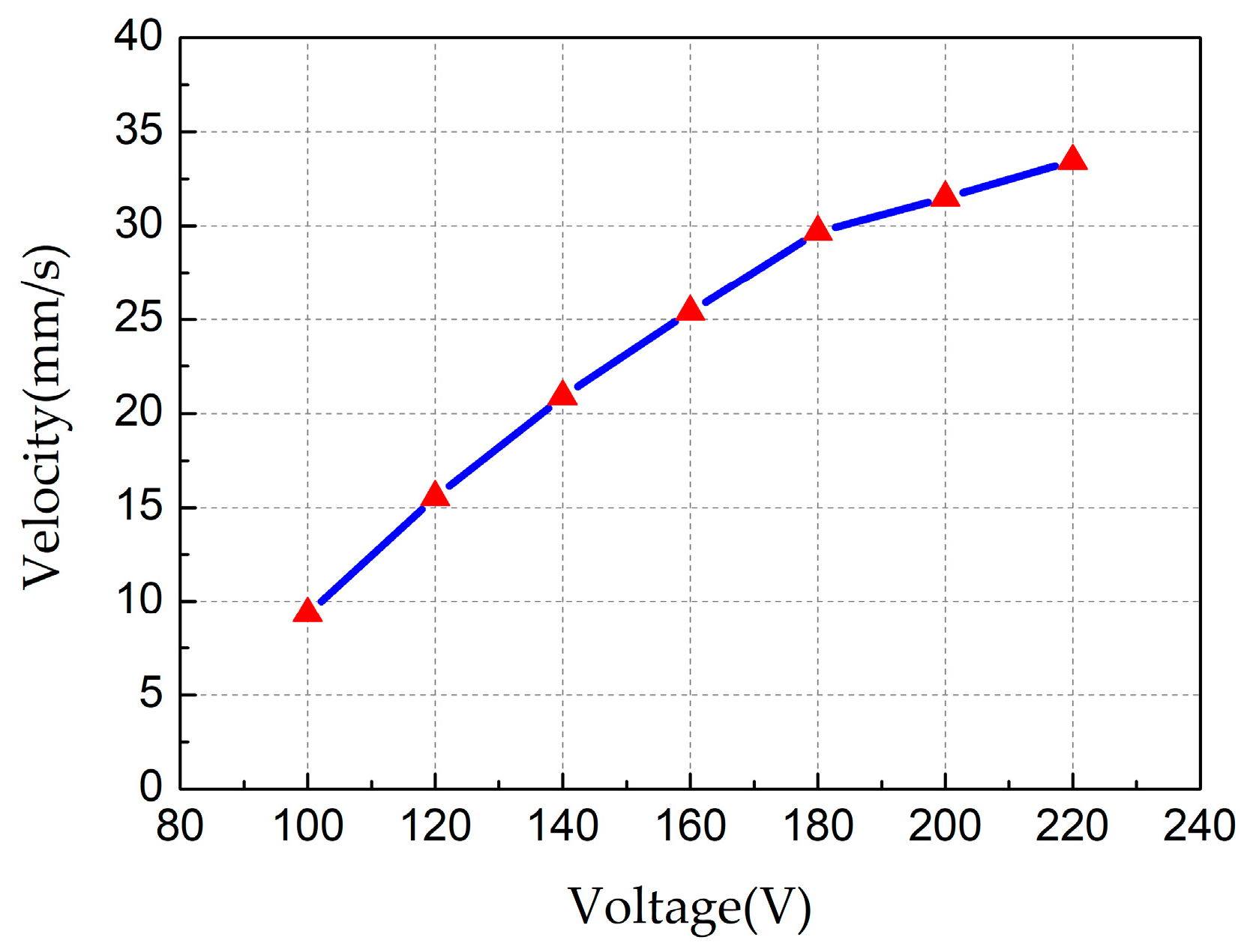
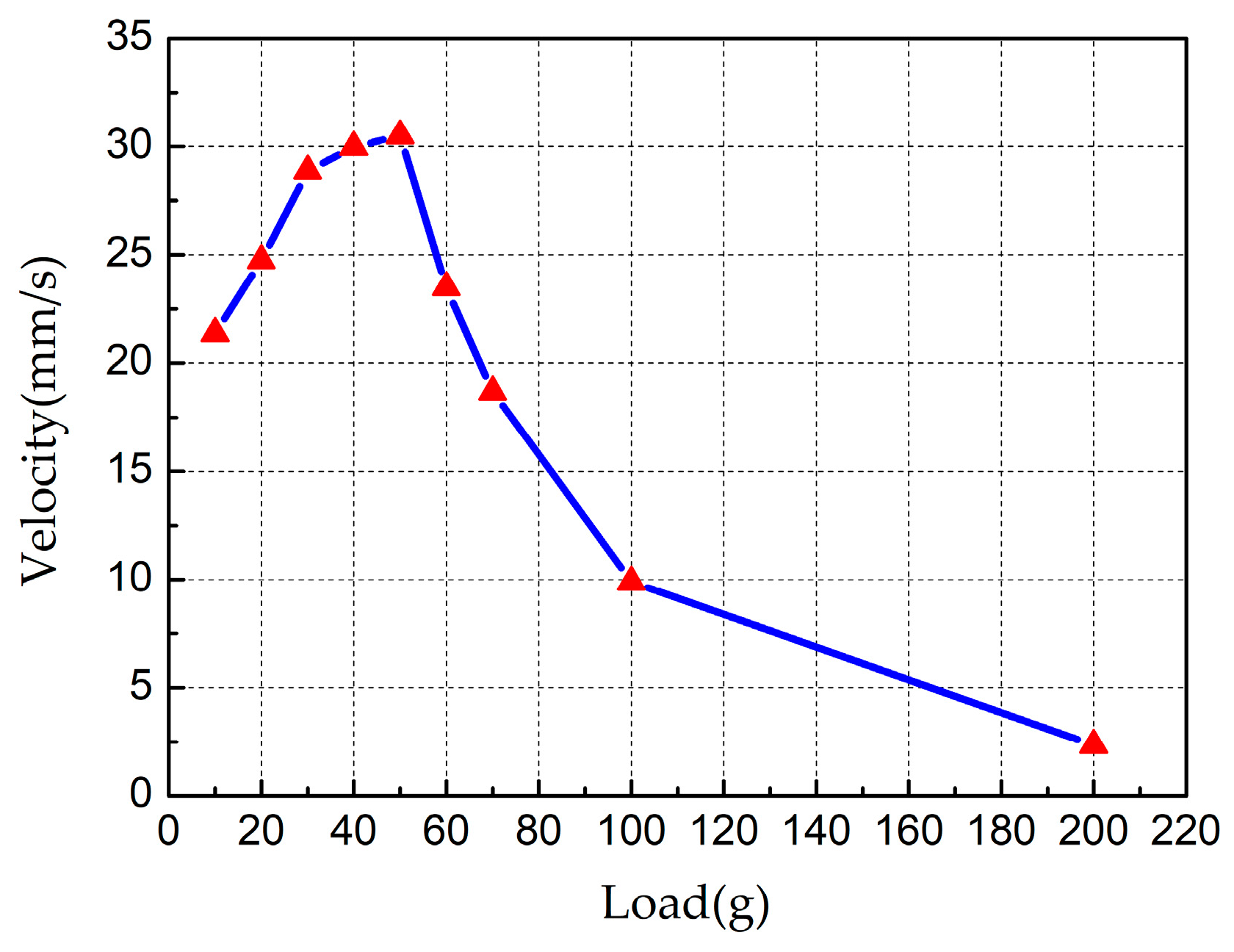
4.3. Output Performance of the Robot
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Karpelson, M.; Wei, G.Y.; Wood, R.J. Driving high voltage piezoelectric actuators in microrobotic applications. Sens. Actuators A-Phys. 2012, 176, 78–89. [Google Scholar] [CrossRef]
- Sreetharan, P.S.; Whitney, J.P.; Strauss, M.D.; Wood, R.J. Monolithic fabrication of millimeter-scale machines. J. Micromech. Microeng. 2012, 22, 055027. [Google Scholar] [CrossRef]
- Simu, U.; Johansson, S. Fabrication of monolithic piezoelectric drive units for a miniature robot. J. Micromech. Microeng. 2002, 12, 582–589. [Google Scholar] [CrossRef]
- Baisch, A.T.; Wood, R.J. Design and fabrication of the harvard ambulatory microrobot. In Proceedings of the 14th International Symposium on Robotics Research (ISSR), Lucerne, Switzerland, 31 August–3 September 2009. [Google Scholar]
- Bergbreiter, S.; Pister, K.S.J. Design of an autonomous jumping microrobot. In Proceedings of the IEEE International Conference on Robotics and Automation, Roma, Italy, 10–14 April 2007. [Google Scholar]
- Kim, B.; Lee, M.G.; Lee, Y.P.; Kim, Y.I.; Lee, G.H. An earthworm-like micro robot using shape memory alloy actuator. Sens. Actuators A-Phys. 2006, 125, 429–437. [Google Scholar] [CrossRef]
- Lim, J.; Park, H.; An, J.; Hong, Y.S.; Kim, B.; Yi, B.J. One pneumatic line based inchworm-like micro robot for half-inch pipe inspection. Mechatronics 2008, 18, 315–322. [Google Scholar] [CrossRef]
- Erdem, E.Y.; Chen, Y.M.; Mohebbi, M.; Suh, J.W.; Kovacs, G.T.A.; Darling, R.B.; Bohringer, K.F. Thermally actuated omnidirectional walking microrobot. J. Microelectromech. Syst. 2010, 19, 433–442. [Google Scholar] [CrossRef]
- Ishiyama, K.; Sendoh, M.; Yamazaki, A.; Arai, K.I. Swimming micro-machine driven by magnetic torque. Sens. Actuator A-Phys. 2001, 91, 141–144. [Google Scholar] [CrossRef]
- Hariri, H.; Bernard, Y.; Razek, A. Dual piezoelectric beam robot: The effect of piezoelectric patches’ positions. J. Intell. Mat. Syst. Struct. 2015, 26, 2577–2590. [Google Scholar] [CrossRef]
- Shen, Z.H.; Liu, Y.X.; Zhao, J.G.; Tang, X.T.; Chen, W.S. Design and experiment of a small legged robot operated by the resonant vibrations of cantilever beams. IEEE Access 2017, 5, 8451–8458. [Google Scholar] [CrossRef]
- Juhas, L.; Vujanic, A.; Adamovic, N.; Nagy, L. Development of platform for micro-positioning actuated by piezo-legs. In Proceedings of the IEEE International Conference on Robotics and Automation, San Francisco, CA, USA, 24–28 April 2000. [Google Scholar]
- Liu, Y.X.; Yan, J.P.; Xu, D.M.; Chen, W.S.; Yang, X.H.; Tian, X.Q. An I-shape linear piezoelectric actuator using resonant type longitudinal vibration transducers. Mechatronics 2016, 40, 87–95. [Google Scholar] [CrossRef]
- Hariri, H.H.; Soh, G.S.; Foong, S.; Wood, K. Locomotion study of a standing wave driven piezoelectric miniature robot for bi-directional motion. IEEE Trans. Robot. 2017, 33, 742–747. [Google Scholar] [CrossRef]
- Liu, Y.X.; Yang, X.H.; Chen, W.S.; Xu, D.M. A bonded-type piezoelectric actuator using the first and second bending vibration modes. IEEE Trans. Ind. Electron. 2016, 63, 1676–1683. [Google Scholar] [CrossRef]
- He, S.Y.; Chen, W.S.; Tao, X.; Chen, Z.L. Standing wave bi-directional linearly moving ultrasonic motor. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 1998, 45, 1133–1139. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.X.; Chen, W.S.; Yang, X.H.; Liu, J.K. A T-shape linear piezoelectric motor with single foot. Ultrasonics 2015, 56, 551–556. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.X.; Shen, Q.Q.; Shi, S.J.; Deng, J.; Chen, W.S.; Wang, L. Research on a novel exciting method for a sandwich transducer operating in longitudinal-bending hybrid modes. Sensors 2017, 17, 1510. [Google Scholar] [CrossRef]
- Yan, S.Z.; Zhang, F.X.; Qin, Z.; Wen, S.Z. A 3-dofs mobile robot driven by a piezoelectric actuator. Smart Mater. Struct. 2006, 15, N7–N13. [Google Scholar] [CrossRef]
- Son, K.J.; Kartik, V.; Wickert, J.; Sitti, M. A piezoelectric unimorph actuator based precision positioning miniature walking robot. In Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Monterey, CA, USA, 24–28 July 2005. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Authors | Actuation Mechanism | Size | Weight | DOF | Speed | Load Capacity |
|---|---|---|---|---|---|---|
| Lim et al. [7] | Pneumatic | 70 mm × 10 mm × 10 mm | Not specified | 1 | 50 mm/s | Not specified |
| Erdem et al. [8] | Thermal | 30 mm × 10 mm × 0.9 mm | 0.478 g | 3 | Linear:0.25 mm/s. Rotational: 0.33 deg/s | 3.5 g |
| Ishiyama et al. [9] | Magnetic | 12 mm × 2 mm × 2 mm | Not specified | Not specified | 22.5 μm/s | Not specified |
| Yan et al. [19] | Piezoelectric | 55 mm × 35 mm × 20 mm | 65 g | 3 | 0.24 mm/s | Not specified |
| Son et al. [20] | Piezoelectric | 55 mm × 45 mm × 19 mm | 23.25 g | 1 | 58.6 mm/s | Not specified |
| This work | Piezoelectric | 36 mm × 98 mm × 14 mm | 49.8 g | 3 | 33.45 mm/s | 200 g |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Su, Q.; Quan, Q.; Deng, J.; Yu, H. A Quadruped Micro-Robot Based on Piezoelectric Driving. Sensors 2018, 18, 810. https://doi.org/10.3390/s18030810
Su Q, Quan Q, Deng J, Yu H. A Quadruped Micro-Robot Based on Piezoelectric Driving. Sensors. 2018; 18(3):810. https://doi.org/10.3390/s18030810
Chicago/Turabian StyleSu, Qi, Qiquan Quan, Jie Deng, and Hongpeng Yu. 2018. "A Quadruped Micro-Robot Based on Piezoelectric Driving" Sensors 18, no. 3: 810. https://doi.org/10.3390/s18030810
APA StyleSu, Q., Quan, Q., Deng, J., & Yu, H. (2018). A Quadruped Micro-Robot Based on Piezoelectric Driving. Sensors, 18(3), 810. https://doi.org/10.3390/s18030810