This section includes the description of the indoor mapping wearable prototype designed in the University of Vigo, and the systems used for the analysis of its performance.
2.1. Wearable Indoor Mapping Prototype from the University of Vigo
The wearable prototype presented in this paper consists of a platform, accessories for sensor integration, interior structures for the electronics, and the sensors themselves (
Figure 1).
The platform selected is a backpack made of rigid plastic, and filled with hard foam, so that the electronics are firmly and safely stored. The inner structure presents a space in the centre, where the electronic components needed are fixed. These components include a compact computer board for the connection and control of the sensors, and the respective connection ports (ethernet) for communication and power supply. The battery connection is included in the interior of the wearable prototype, in such way that access is fast and easy for replacement purposes.
In addition, a set of serial ports (USB) and the on/off buttons for the control computer board and the 3D LiDAR sensor are embedded on the left side of the platform, providing full control of the system during measurement without need for opening (
Figure 1-right). The serial ports are destined to the connection of the front camera and to data extraction via USB memory from the control computer board to the processing computer. The sides are also equipped with fans that keep the electronics under normal temperature during operation.
An external structure made of stainless steel and plastic is installed on the wearable prototype for the 3D LiDAR sensor (
Figure 1). The objective of the structure is to place the sensor over the head of the operator and avoid occlusions in the data that its own body may cause. In addition, an increase in the height of the 3D LiDAR sensor ensures the acquisition of points both from the ground and the ceiling, provided that it only measures in a range of 30° vertically (
Table 1). This sensor is a Velodyne VLP-16, which has been chosen due to its capability of acquiring 3D point clouds and its low weight and dimensions. In each scan, the sensor acquires the 3D coordinates of the points reached by the 16 rays of the 3D LiDAR, providing a sparse 3D point cloud for each position of the platform. In addition, two webcams are installed in the platform, one frontal and one in the back, with the aim of providing visual information of the environment for inspection purposes.
All the information measured is stored in the control computer board and can be extracted after each measurement for processing. The measurement is also controlled by the control computer board, as follows: the 3D LiDAR performs measurements and sends them to the control computer board, where each measurement is stored with the computer-time in the name of the file. This way, the incoming data is time-stamped and stored in the same file, in a binary file for acquisition structured and codified by ROS, whose corresponding format is “bag” [
20,
21]. This format is chosen due to the fact that it is the standard for data exchange between software developers and ROS. In addition, it allows for the reproduction of the acquisition and its postprocessing by manipulating the reproduction speed for the generation of more accurate results than when processed in real time.
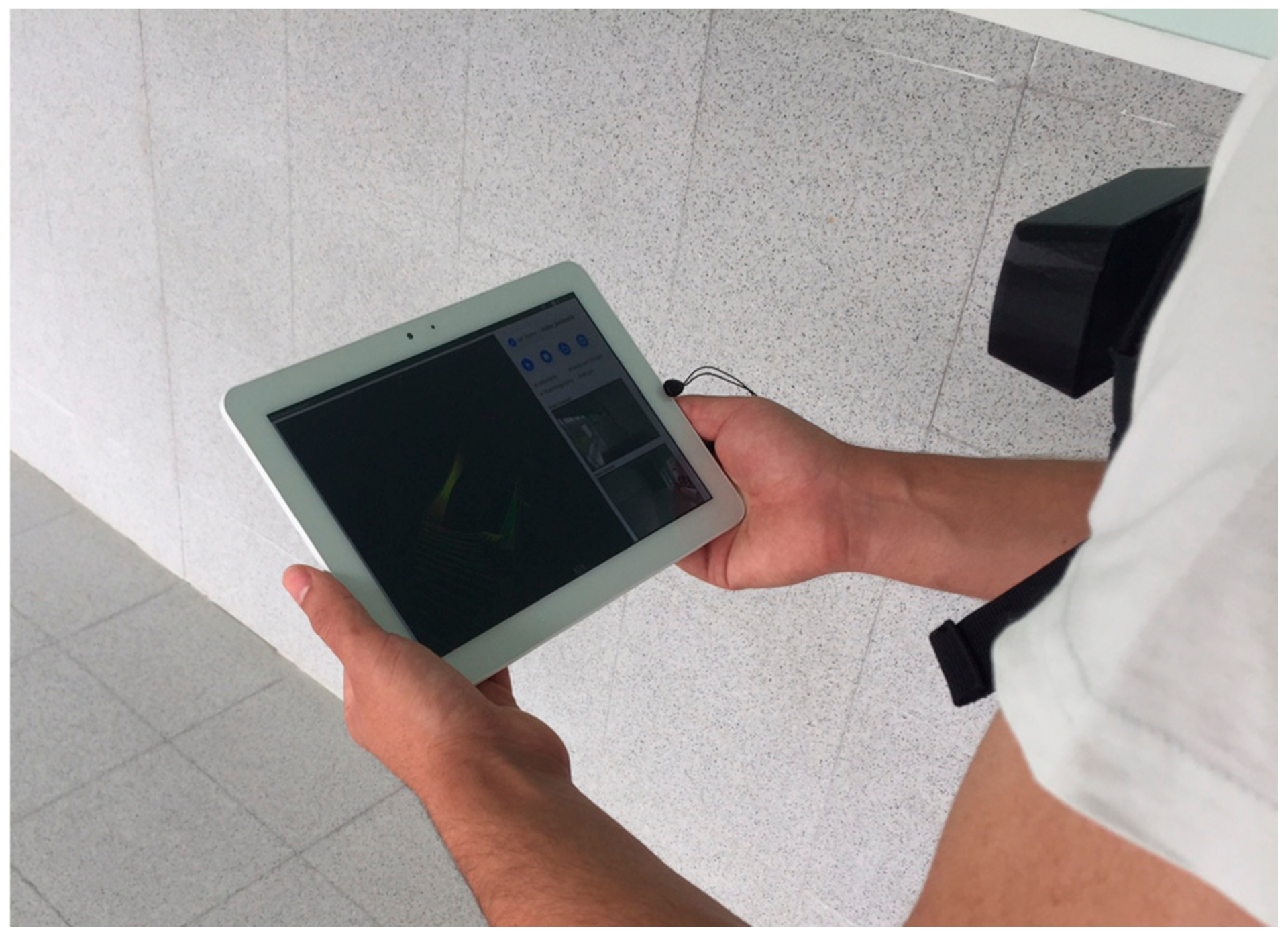
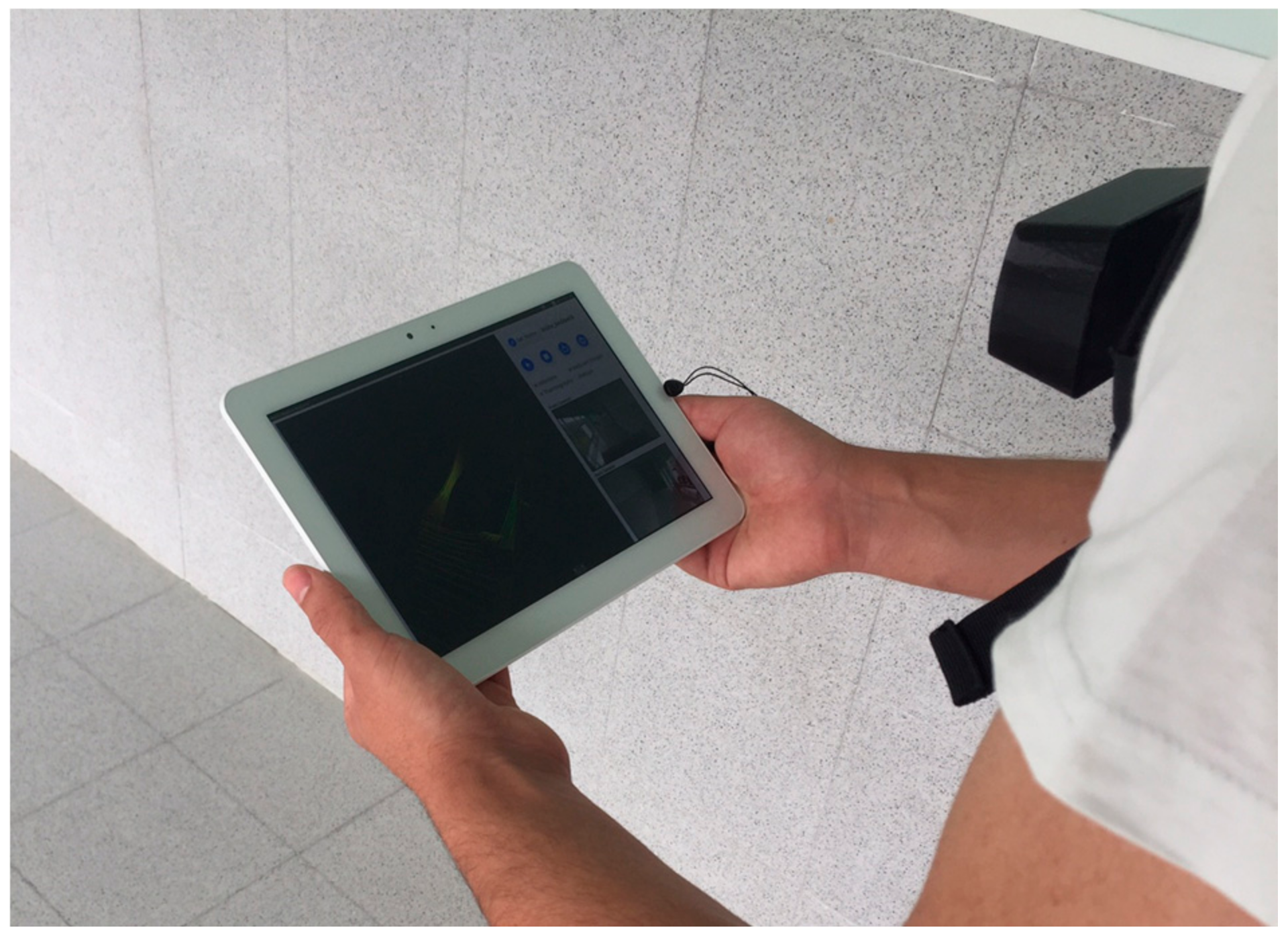
Launch and control of each acquisition project is performed by the operator of the wearable prototype through a tablet (
Figure 2), in such way that opening the prototype in the inspection site is not needed. The tablet is connected to the control computer board through a local Wi-Fi, that can also be used for other users within the Wi-Fi range to see the progress of the inspection.
One of the requisites during the design of the system is that acquisition should be performed in a straight-forward manner, in such a way that each room and corridor needs to be traversed only once to be correctly modelled in the point cloud. This stands in contrast with the procedure of most mobile indoor mapping systems, that require a ring-shape trajectory to ensure correct modelling of the environment; that is, the acquisition should start and finish in the same position, and each room should be traversed with a circular trajectory. By avoiding the necessity to perform ring-shaped acquisitions, the time required for inspection reduced by half, which is especially useful in large or long buildings such as academic buildings and commercial centers.
Tests are being performed to determine the best way to enter new rooms (frontally, laterally or backwards), with no determinant results about an optimal methodology for the wearable prototype. This stands in contrast with the methodology of the Zeb-Revo, which requires the entrance in new rooms laterally or backwards. This lack of variability in the results of the wearable prototype is due to the position of the 3D LiDAR and its acquisition of points in the 360° horizontally, that allows the acquisition of points from the new and the old rooms from the door without specific movements or changes in the operator’s position.
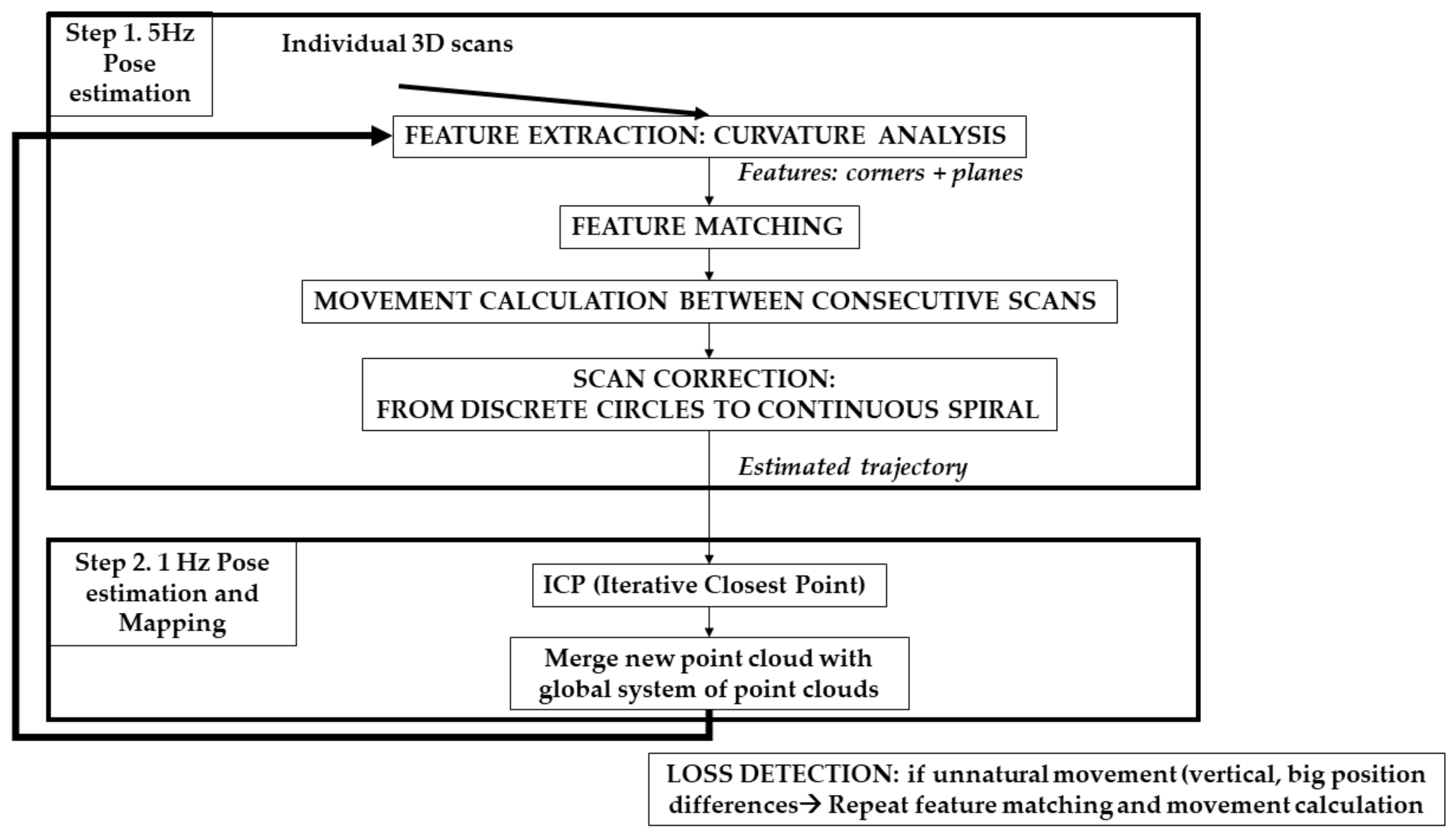
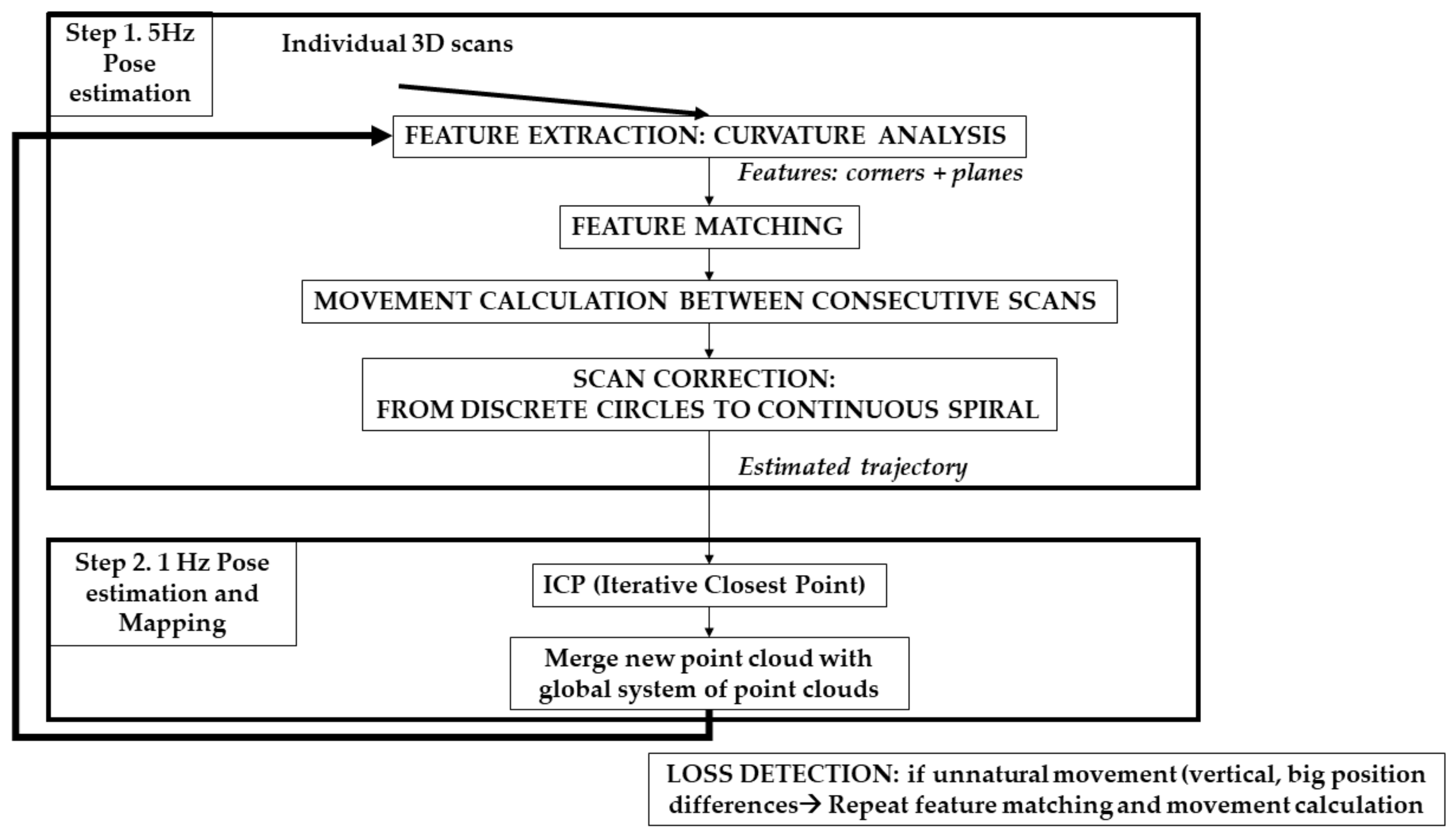
Data (point clouds acquired within the trajectory) are processed with an internally developed software, denominated as SLAM Post-process, and based on ROS, which is installed on a complementary computer, external from the backpack structure. The SLAM algorithm is performed in two steps, as detailed in
Figure 3. The first step consists of the estimation of the trajectory and the correction of the movement. To do this, the individual 3D scans acquired are subjected to an iterative process at high speed, with a frequency of 5 Hz (that is, the scans introduced in the process are those acquired with a 5 s interval: among all the scans acquired, only 1 scan every 5 s is subjected to registration and used for the coarse estimation of the trajectory). A curvature analysis is performed to the scans for the extraction of two types of features: angular features such as corners and columns, and planar features. These features are extracted through a curvature analysis, based on the nearest closest points. Each neighborhood of points is used for the computation of the normal vector of each point through Principal Components Analysis (PCA) in which those points with a normal vector different from the four closest points in the neighborhood are identified as angular features, and those points sharing the same direction of the normal vector as at least 20 points in the neighborhood are classified as planar features. These thresholds are established as a compromise between the availability of information to avoid the identification of outliers as features and the minimization of points used to manage the computation at 5 Hz.
The features are submitted to an iterative matching process, which is performed per line (or ray) of the scan, as it is an extrapolation of the procedure performed for 2D LiDAR sensors that only measure one line per acquisition through repetition of the procedure 16 times, one per ray or channel of the Velodyne sensor integrated in the mobile platform. This coarse registration of point clouds allows for the extraction of the estimated trajectory as well as an estimation of the rotation matrix and translation vector between the scans. With this estimation, the theoretical circular form of the individual scans is corrected and transformed into a continuous spiral, which is a more realistic representation of the scanning process during movement and allows for a better estimation of the posterior scan registration and trajectory refinement.
In the second step of the SLAM processing, all the points acquired in the individual scans are used in a registration process based on Iterative Closest Point (ICP) algorithm [
22,
23]. This registration is performed at 1 Hz speed; to ensure this frequency, the registration is performed for the scans acquired within 5 s intervals. This time interval does not affect the precision of the final result since the computation of the registration is helped by: (1) the estimated trajectory, that provides a preliminary position of the individual scans related to the trajectory; (2) the estimation of the transformation between scans (rotation matrix and translation vector) and (3) the corrected spiral form of the scanning during movement.
The registration of individual point clouds during SLAM is complemented with an algorithm for the automatic detection of losses in the trajectory. This algorithm detects the appearance of sudden and unrealistic changes in the computation of the trajectory, such as vertical movements, jumps, and big distances between contiguous positions, based on the assumption that these movements are not a realistic performance of a human operator. Once a loss is detected the algorithm stops the computation of the trajectory and registers a buffer of first lost positions with a buffer of positions in the part of the trajectory assumed as correct. For this process, Statistical Outlier Removal (SOR) Passthrough algorithms are applied to eliminate points measured in each pose with a great distance from the center of the point cloud and consequently present low accuracy, in addition to an MLS Moving Least Squares (MLS) filter to improve the shape of the point cloud while eliminating points associated to noise. Once the pose is recalculated, the SLAM algorithm is restarted.
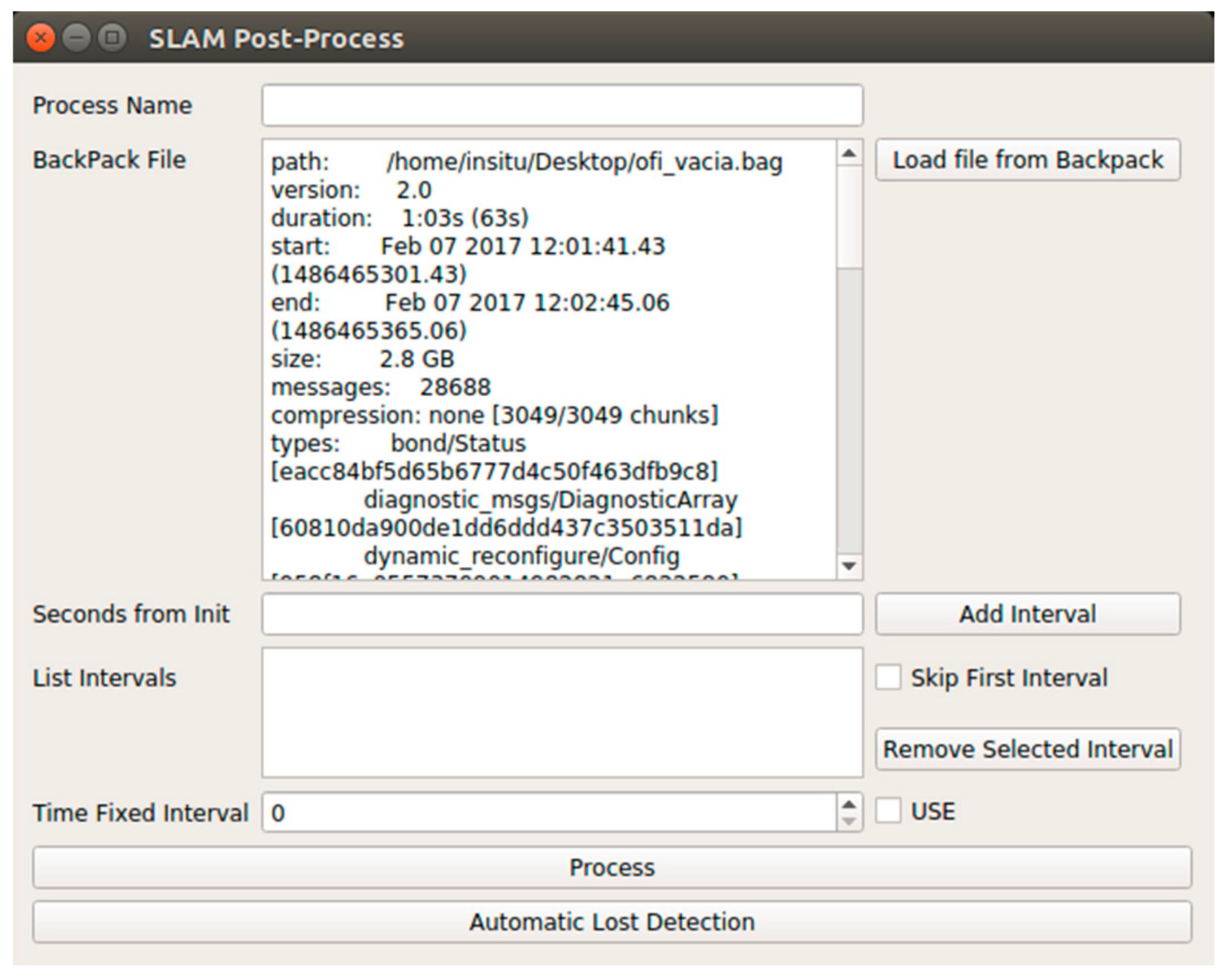
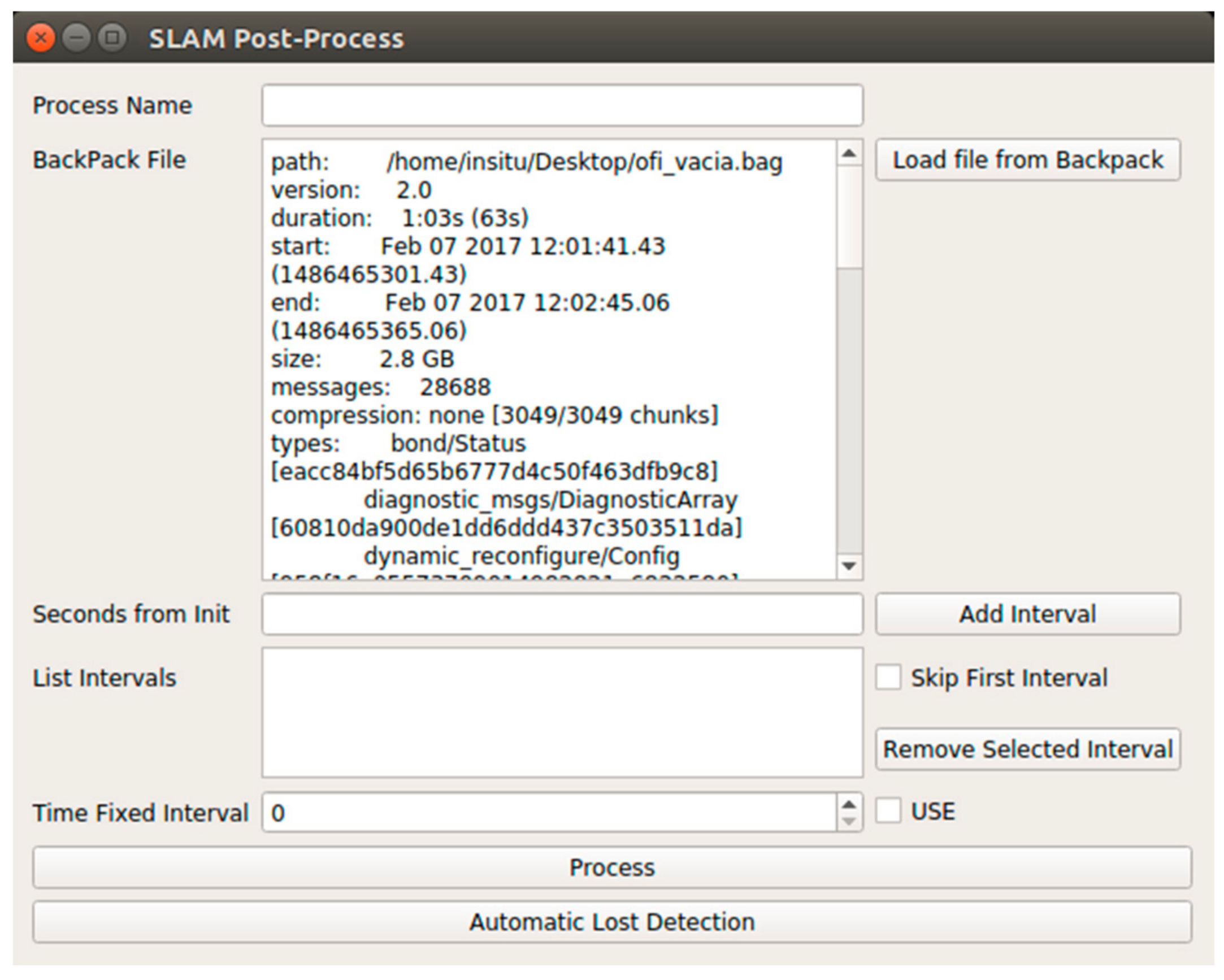
The application of the SLAM algorithm can be configured prior to start (
Figure 4), including the definition of intervals for partial processing and the decision of application of Loss Detection, which is optional.
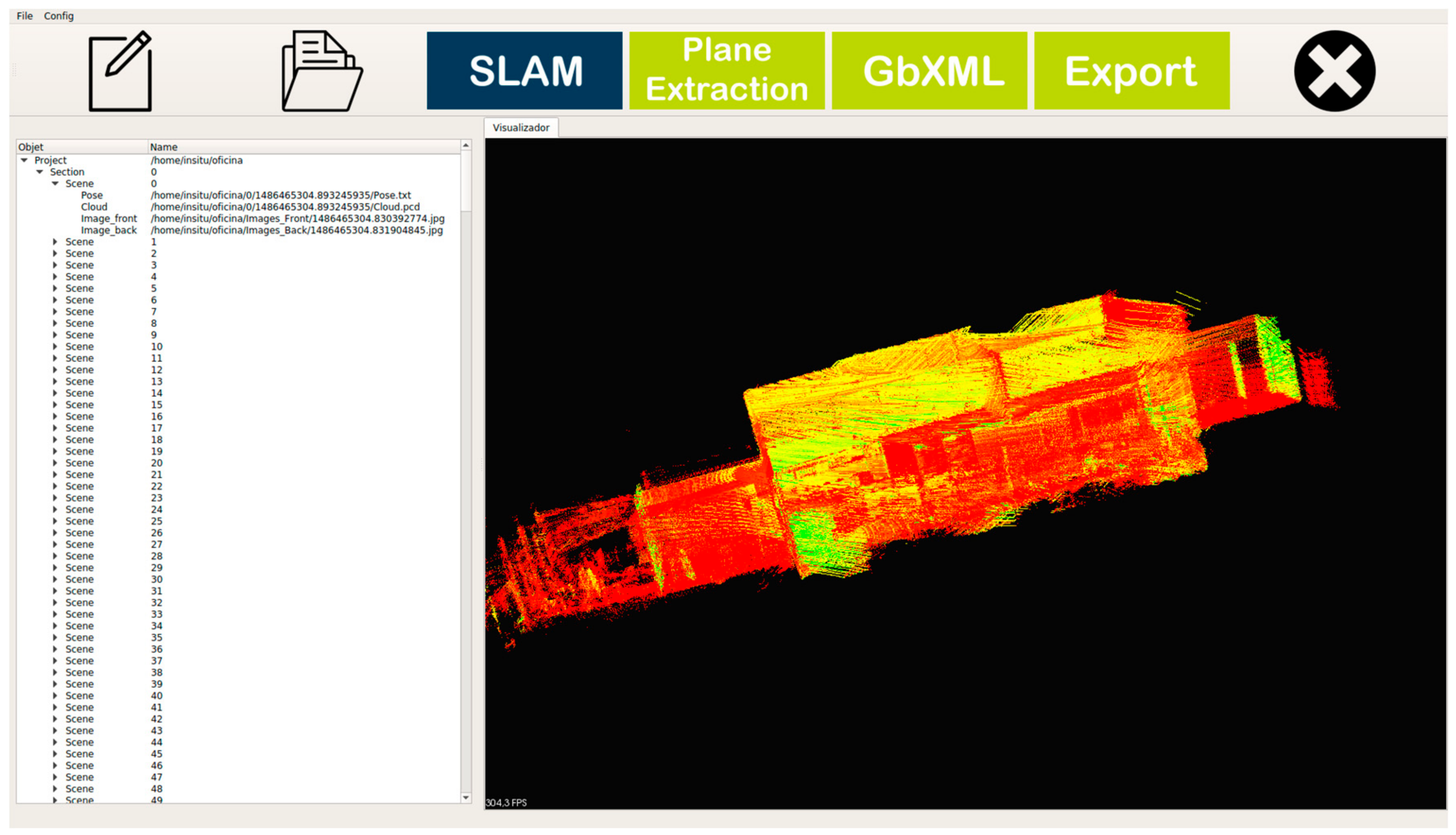
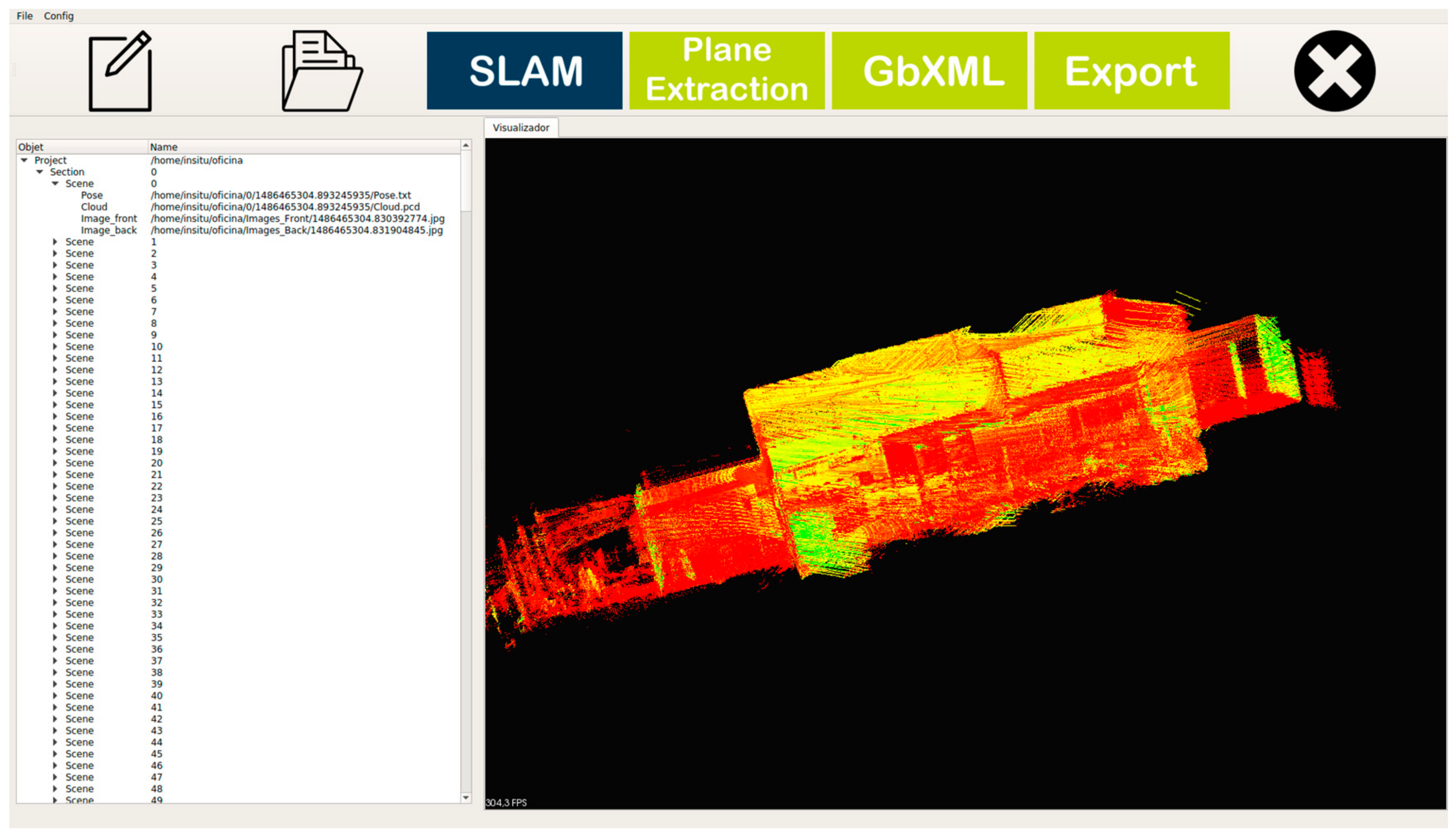
Once the SLAM is finished and the 3D point cloud of the building interior is generated, the point cloud is stored in a tree-like structure, where the poses of the trajectory store the coordinates of all the points measured from them. Thus, the tree of the composition of the point cloud is loaded to the main interface (
Figure 5), allowing the selection of single scenes for visualization purposes. These scenes are composed by the individual point clouds and an image pair from the webcams. In the case that more than one image pair is available for a given position in the trajectory computed, the focus level of the images is analyzed, and the image pair with less blur is associated to the position dataset.
2.2. Commercial Systems
The commercial mobile mapping system Zeb-Revo, from the company GeoSLAM, is used for the measurement of the same scenarios as the wearable prototype. It is a second version of their system for indoor mapping, whose first version was named Zebedee [
24]. While the previous version was formed by a 2D LiDAR moved with a spring, the Zeb-Revo consists of a hand-held platform equipped with a 2D LiDAR, Hokuyo UTM-30LX-F, that rotates during measurement (
Figure 6). This laser scanner is a special version of Hokuyo which acquires at higher frequency rates a lower number of points than the commercial version; in this way, the number of points is sacrificed towards the increase in the number of scenes acquired, thus minimizing the risk of losing the pose calculation due to the fast inspection of the new positions. In addition, an IMU is placed on top of the 2D LiDAR in order to control its position during rotation and displacement of the operator. Thanks to the rotation, the system acquires information of the three-dimensions of the area under study, enabling the application of 3D-SLAM algorithms using a 2D LiDAR. Sensors and data acquisition are controlled by a PC which is stored in the backpack that should be worn by the operator during inspection. In addition to communication, the backpack includes batteries to power the handheld platform, both tasks performed through the corresponding connection cables. Technical characteristics are shown in
Table 2.
Regarding data acquisition, the main characteristic of the Zeb-Revo system is that inspections should start and finish in the same point and position, and trajectories should present ring-shape. In addition, when entering and exiting new rooms, the system should be laterally turned, so that, at the door, information is acquired from both the old and the new room.
The case studies are also measured with the terrestrial laser scanner FARO Focus
3D X330, which has been chosen as ground truth due to its high precision and accuracy in the measurements, as stated in
Table 3.
The comparison between methodologies requires that all point clouds represent the same areas. While Mobile Mapping Systems have the capacity to measure large areas with no direct visual contact between them, the acquisition of point clouds from different positions is required for a methodology based on terrestrial LiDAR. The scans acquired with FARO Focus
3D X330 for each case study are registered to the same coordinate system resulting in a unique point cloud representing the complete area covered by the Mobile System. Registration is performed with Iterative Closest Point algorithm (ICP) [
22,
23], starting from a coarse registration with 3 corresponding points and followed by a fine registration using all points in the point clouds and the coarse registration results.
2.3. Case Studies
Different case studies have been analyzed with the three systems (wearable mapping prototype, Zeb-Revo and Faro Focus), selected for their representability of common indoor scenarios:
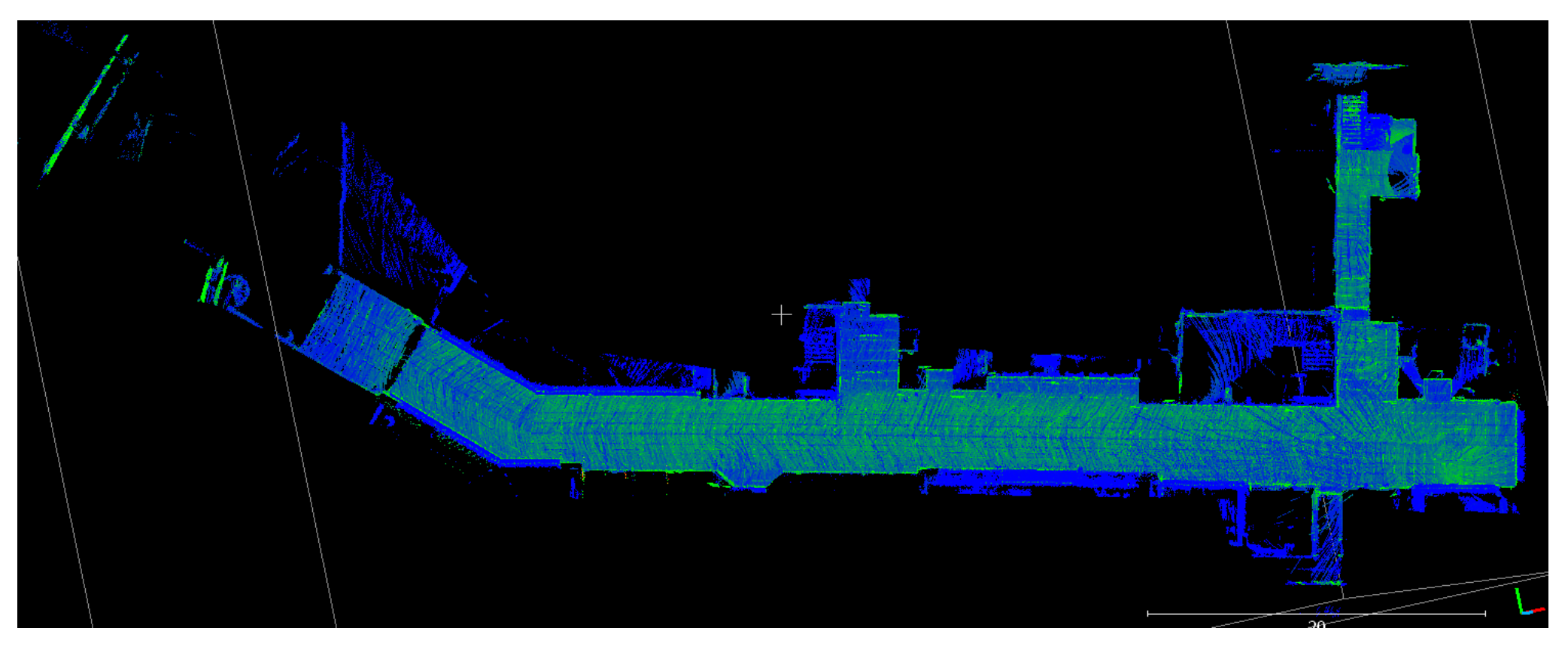
Case study 1: corridor with doors and entrances at both sides, presenting symmetrical similarity and a repetitive pattern. This scenario involves a complex case study for the mobile systems based on SLAM due to the high probability of identifying two consecutive features as the same one given the lack of differentiation in their environments, and consequently obtaining a repetition of results for pose estimation, meaning null displacement between estimated poses.
Case study 2: big square hall, in which two walls are composed by glass windows. This scenario implies a difficulty to all scanning systems in general due to the reflectivity of glass, that provokes the appearance of a double registration for the points in the windows. The dimensions of the hall make it difficult for the mobile systems to extract features homogeneously distributed within the scene for a correct SLAM execution. In addition, the hall constitutes the entrance to the building, so the presence of people moving is unavoidable, with the consequent appearance of artifacts in the point cloud. Furniture such as tables, benches, standing posters and a vending machine have not been moved in order to test the performance of the system with elements that provoke occlusion.
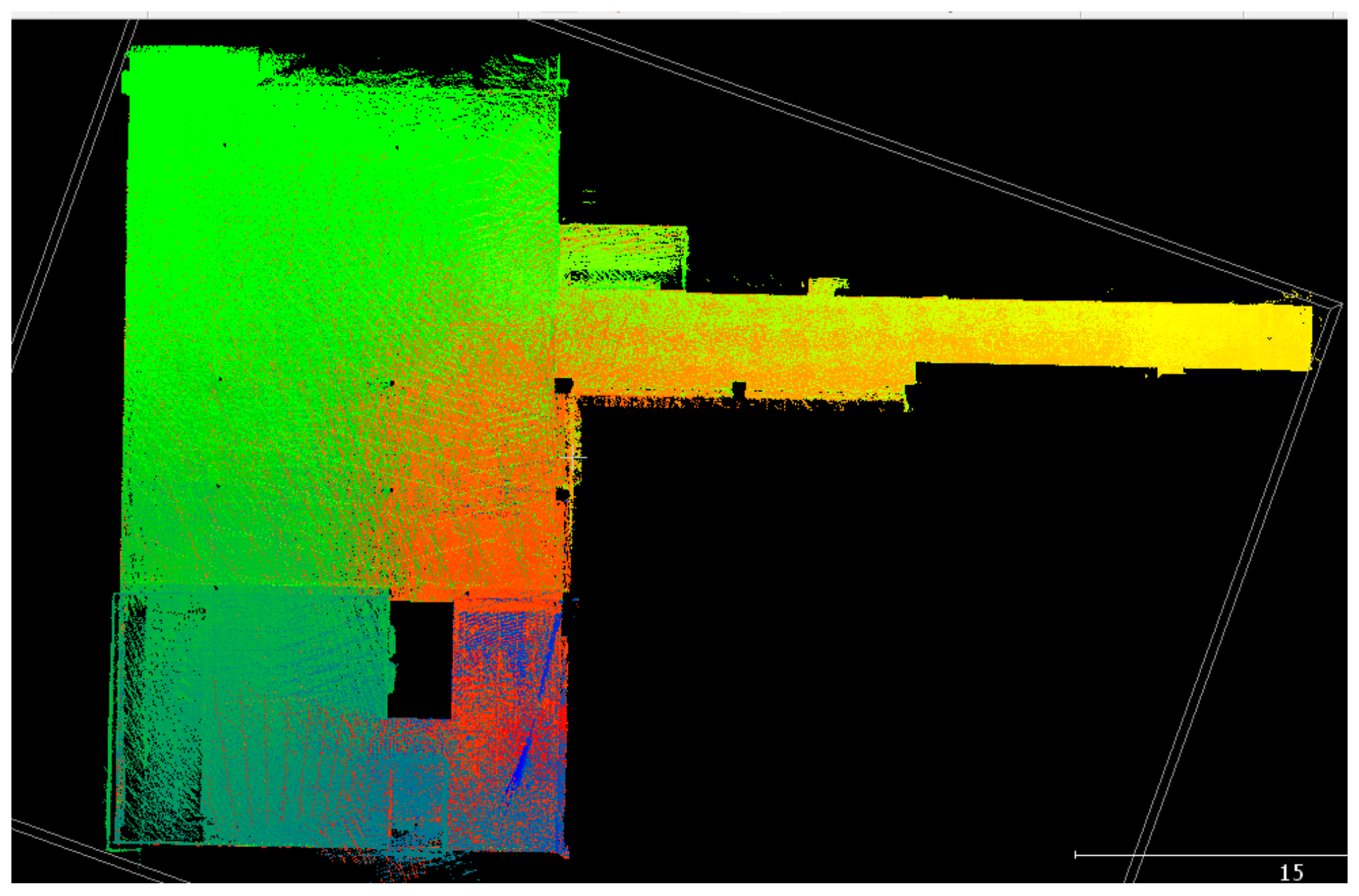
Case study 3: corridor-room system, constructed with materials such as bricks and concrete. This case study presents no special requirements regarding material reflectivity but is chosen to study the capability of the system for scene reconstruction including turns and entrances in new spaces.
Case study 4: corridor-room system, where one side wall of the corridor is composed of glass material, and the corridor presents a repetitive layout. Thus, in addition to the complexity for reconstruction introduced by the presence of reflections in the wall, the possibilities for the systems to lose track of the displacement are evaluated.
The number points of each acquisition are shown in
Table 4. The measurement with FARO Focus was limited to two scan positions in order to equal the time needed by the mobile indoor mapping systems for inspection.
In order to perform an analysis of the performance of the systems under real circumstances, the presence of people in the study areas was allowed and cluttering and occlusions were present since no furniture was moved from its original position.

 ,
, 





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}