A Modified Distributed Bees Algorithm for Multi-Sensor Task Allocation †


Abstract
1. Introduction
2. Related Work
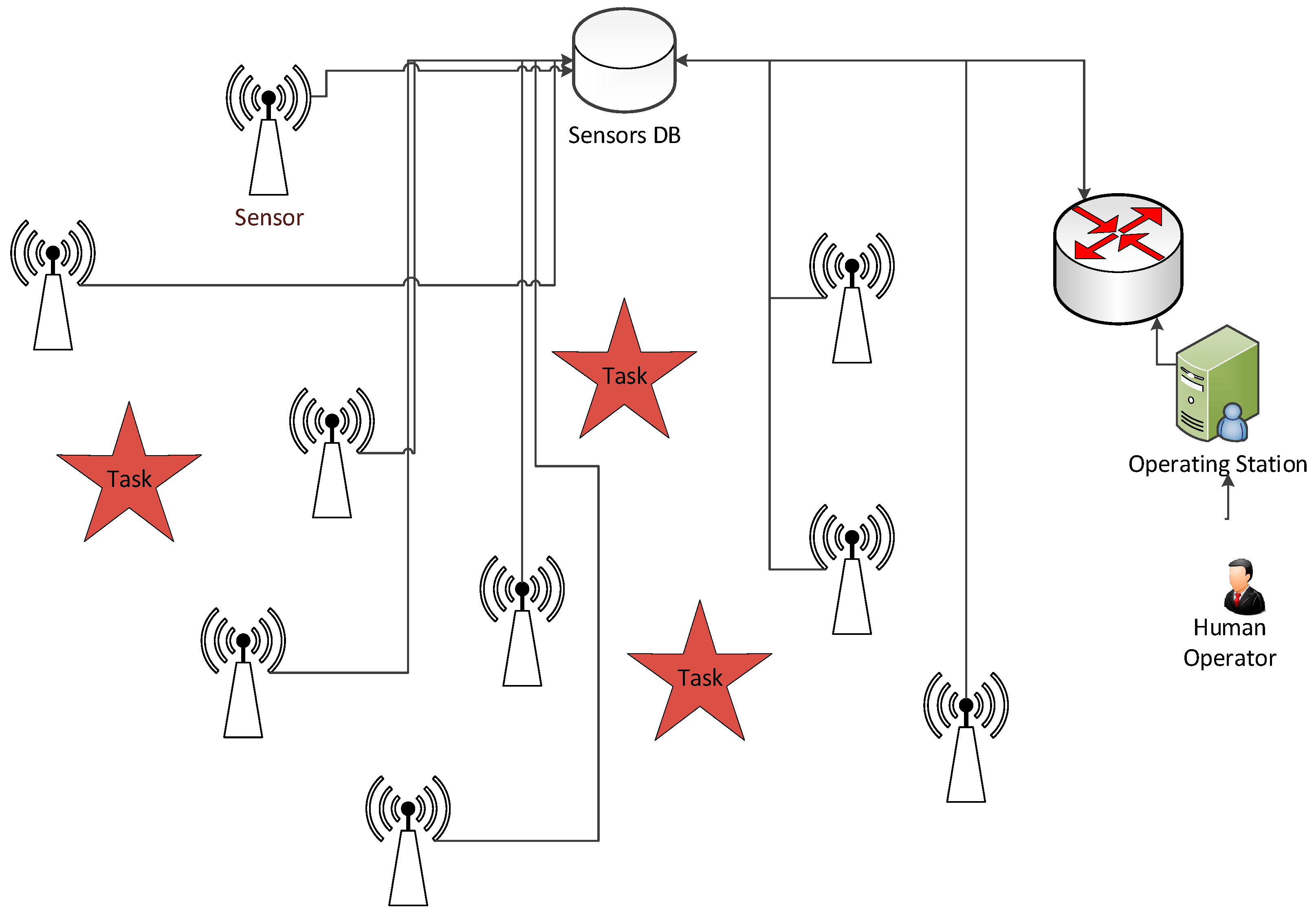
3. Problem Definition
- the tasks occurrence is unknown a priori;
- all of the tasks within a sensor’s range can be allocated to that sensor;
- decision-making for each sensor takes place as soon as a new task is introduced;
- sensors can be reallocated to another task during execution. An abandoned task keeps its remaining execution time, until a new sensor is allocated to it. Following [59] the system is defined with the following characteristics:
- sensors are stationary; and,
- tasks remain stationary after their occurrence.
4. Algorithms
4.1. Distributed Bees Algorithm
4.2. Modified Distributed Bees Algorithm
4.3. Market-Based Algorithm
4.4. Greedy Algorithm
4.5. Bees System
5. Simulation Setup and Analysis
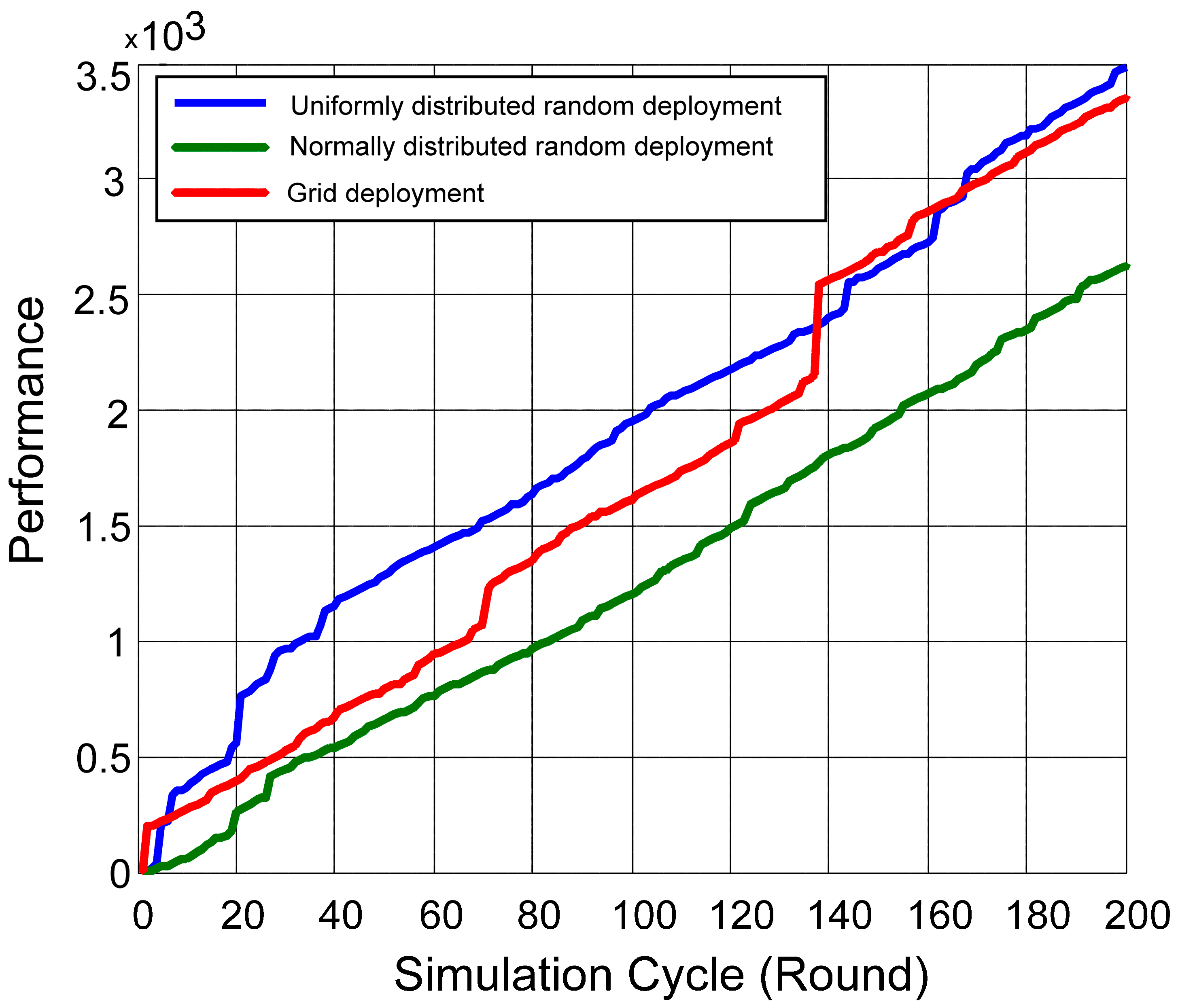
- System performance as defined in (1).
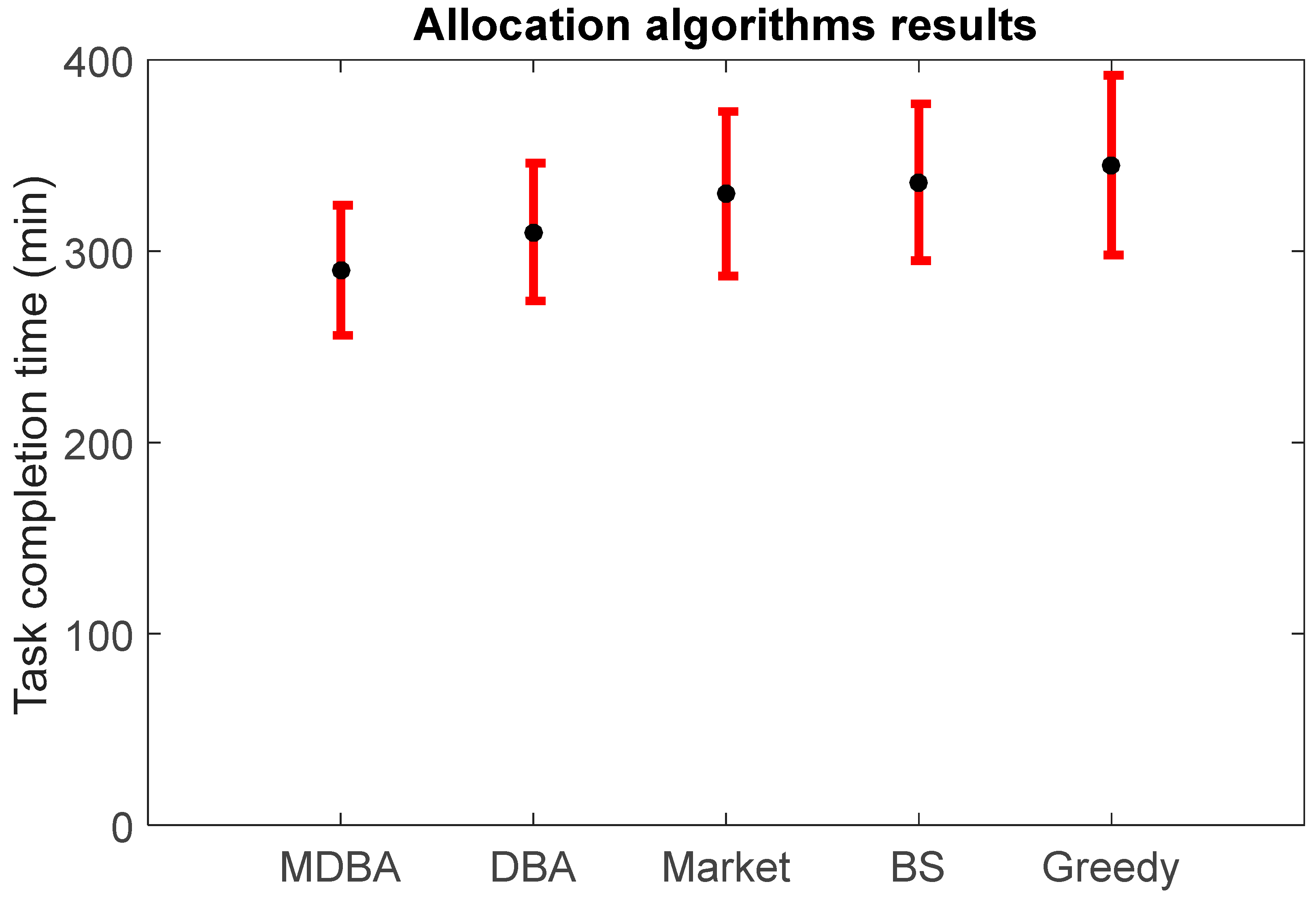
- Tasks completion time as defined in (9).
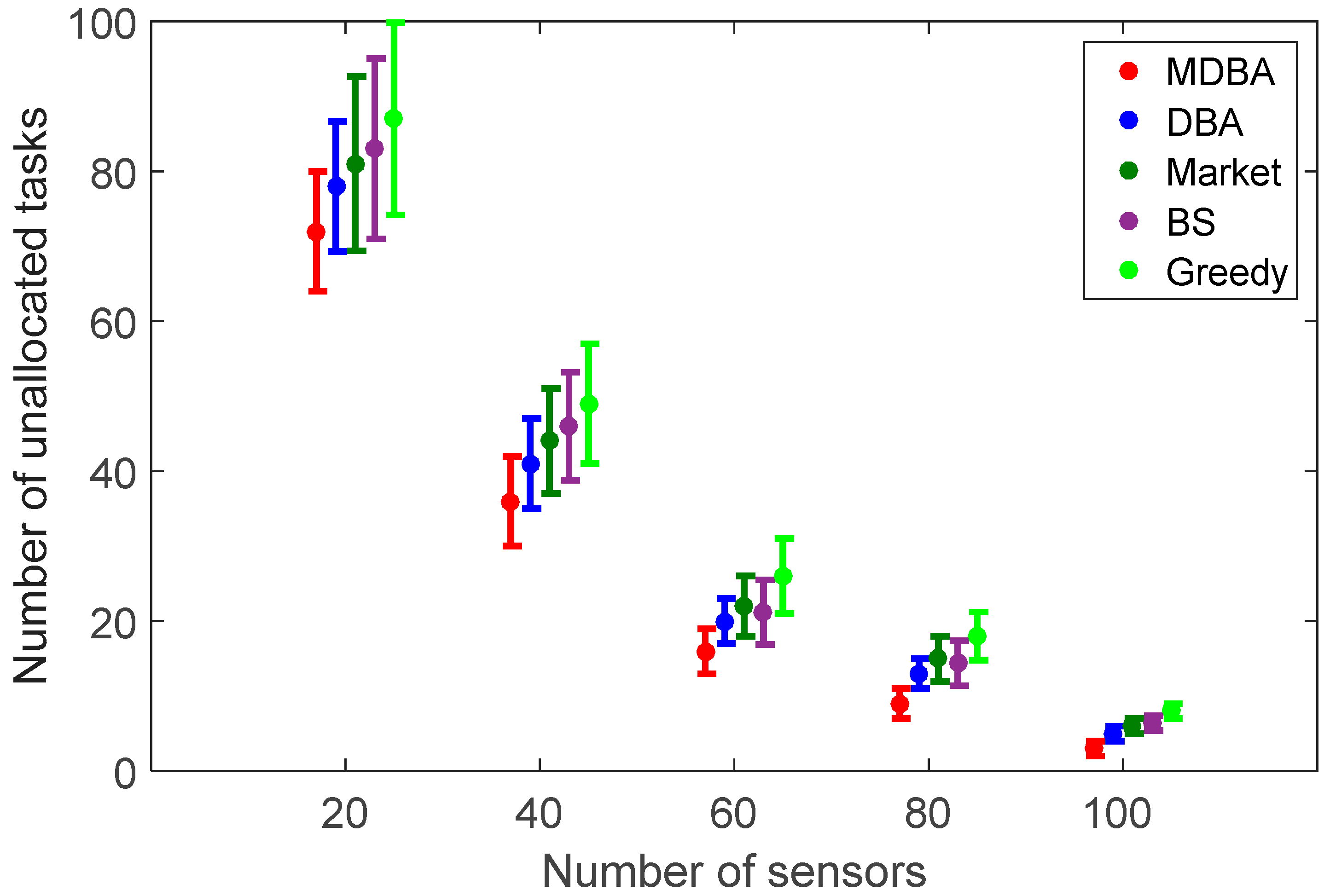
- Number of unallocated tasks is defined by:where λ is the number of unallocated tasks, M is the total number of tasks in the system, N is the total number of sensors in the system, i is the index of current task and Vik is the k-th sensor’s performance on the i-th task.
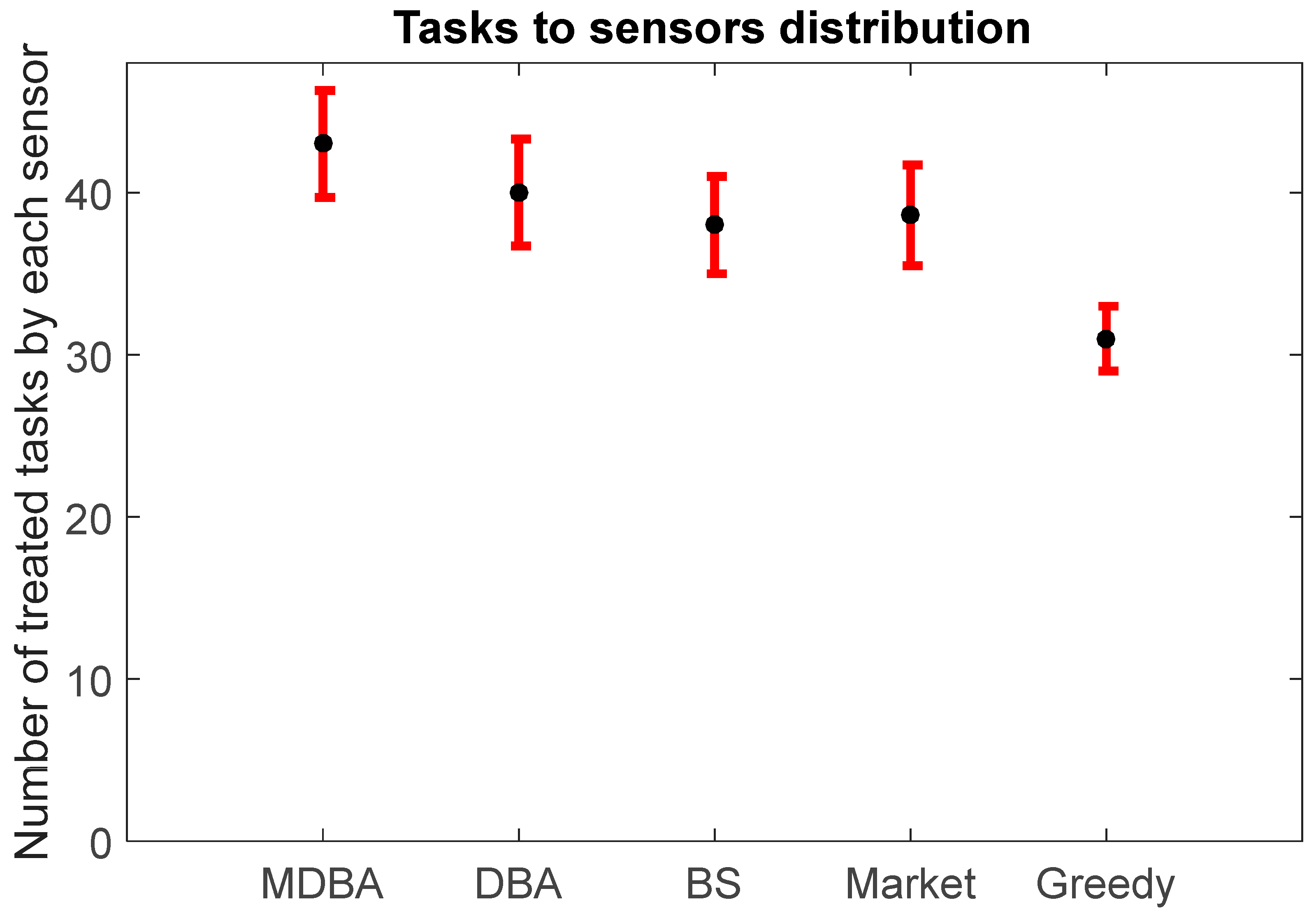
- Number of tasks allocated to a sensor k is defined by:where χk is the number of treated tasks by the k-th sensor, M is the total number of tasks in the system, i is the index of current task and Vik is the k-th sensor’s performance on the i-th task.
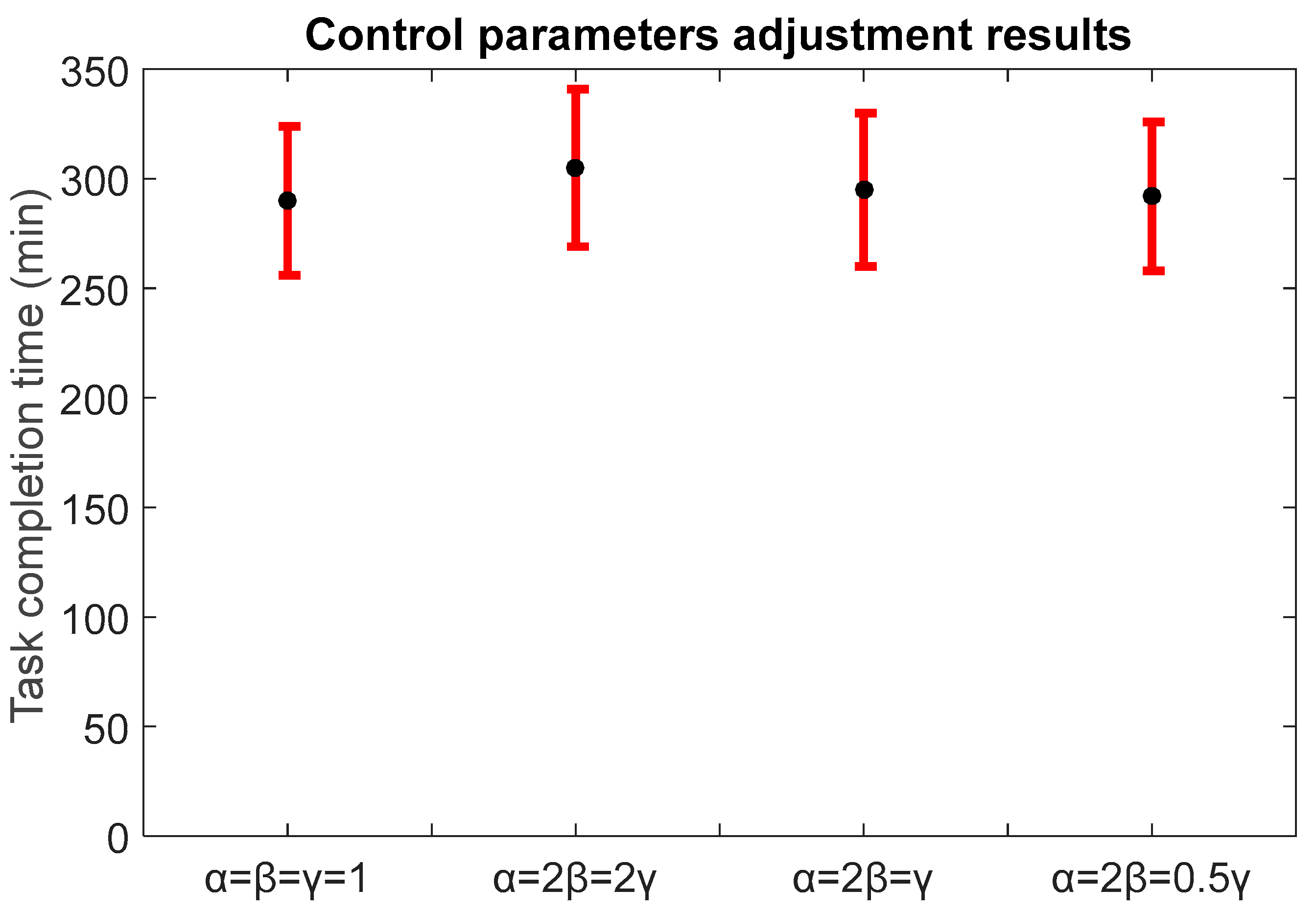
6. Results
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Anastasi, G.; Conti, M.; Di Francesco, M.; Passarella, A. Energy conservation in wireless sensor networks: A survey. Ad Hoc Netw. 2009, 7, 537–568. [Google Scholar] [CrossRef]
- Rowaihy, H.; Eswaran, S.; Johnson, M.; Verma, D.; Bar-Noy, A.; Brown, T.; Porta, T.L. A survey of sensor selection schemes in wireless sensor networks. Proc. SPIE 2007, 6562, 65621A. [Google Scholar]
- Civelek, M.; Yazici, A. Automated Moving Object Classification in Wireless Multimedia Sensor Networks. IEEE Sens. J. 2016, 17, 1116–1131. [Google Scholar] [CrossRef]
- Bian, F.; Kempe, D.; Govindan, G. Utility-based sensor selection. In Proceedings of the IEEE Conference on Information Processing in Sensor Network, Nashville, TN, USA, 19–21 April 2006; pp. 11–18. [Google Scholar]
- Akyildiz, F.; Su, W.; Sankarasubramaniam, Y.; Cayirci, E. Wireless sensor networks: A survey. Comput. Netw. 2002, 38, 393–422. [Google Scholar] [CrossRef]
- Yick, J.; Mukherjee, B.; Ghosal, D. Wireless sensor network survey. Comput. Netw. 2008, 52, 2292–2330. [Google Scholar] [CrossRef]
- Tkach, I.; Edan, Y.; Jevtić, A.; Nof, S.Y. Automatic Multi-Sensor Task Allocation using Modified Distributed Bees Algorithm. In Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics (SMC), Manchester, UK, 13–16 October 2013; pp. 1401–1406. [Google Scholar]
- Panta, L.; Teodorovic, D. Transportation modeling: An artificial life approach. In Proceedings of the 14th IEEE International Conference on Tools with Artificial Intelligence, Washington, DC, USA, 4–6 November 2002; pp. 216–223. [Google Scholar]
- Zlot, R.; Stentz, A.; Dias, M.B.; Thayer, S. Multi-robot exploration controlled by a market economy. In Proceedings of the IEEE International Conference on Robotics and Automation, Washington, DC, USA, 11–15 May 2002; pp. 3016–3023. [Google Scholar]
- Werger, B.; Matarić, M.J. Broadcast of Local Eligibility for Multi-Target Observation. In Distributed Autonomous Robotic System; Parker, L.E., Bekey, G., Barhen, J., Eds.; Springer: Berlin, Germany, 2000; Volume 4, pp. 347–356. [Google Scholar]
- Xiong, N.; Svensson, P. Multi-sensor management for sensor fusion: Issues and approaches. Inf. Fusion 2002, 3, 163–186. [Google Scholar] [CrossRef]
- Colby, M.; Chung, J.J.; Tumer, K. Implicit adaptive multi-robot coordination in dynamic environments. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 5168–5173. [Google Scholar]
- Gerkey, B.P.; Matarić, M.J. Sold!: Auction methods for multirobot coordination. IEEE Trans. Robot. Autom. 2002, 18, 758–768. [Google Scholar] [CrossRef]
- Guerrero, J.; Oliver, G. Multi-robot coalition formation in real-time scenarios. J. Robot. Auton. Syst. 2012, 60, 1295–1307. [Google Scholar] [CrossRef]
- Tolmidis, A.T.; Petrou, L. Multi-objective optimization for dynamic task allocation in a multi-robot system. Eng. Appl. Artif. Intell. 2013, 26, 1458–1468. [Google Scholar] [CrossRef]
- Vachtsevanos, G.; Tang, L.; Reinmann, J. An Intelligent Approach to Coordinated Control of Multiple Unmanned Aerial Vehicles. In Proceedings of the American Helicopter Society 60th Annual Forum, Baltimore, MD, USA, 7–10 June 2004. [Google Scholar]
- He, K.; Jia, M.; Xu, Q. Optimal sensor deployment for manufacturing process monitoring based on quantitative cause-effect graph. IEEE Trans. Autom. Sci. Eng. 2016, 13, 963–975. [Google Scholar] [CrossRef]
- Chen, Y.; Zhao, Q.; An, Z.; Lv, P.; Zhao, L. Distributed multi-target tracking based on the K-MTSCF algorithm in camera networks. IEEE Sens. J. 2016, 16, 5481–5490. [Google Scholar] [CrossRef]
- Matarić, M.J.; Sukhatme, G.S.; Âstergaard, E.H. Multi-robot task allocation in uncertain environments. Auton. Robots 2003, 14, 255–263. [Google Scholar] [CrossRef]
- Michael, N.; Zavlanos, M.M.; Kumar, V.; Pappas, G.J. Distributed multi-robot task assignment and formation control. In Proceedings of the 2008 IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; pp. 128–133. [Google Scholar]
- Williams, N.P.; Liu, Y.; Nof, S.Y. TestLAN approach and protocols for the integration of distributed assembly and test networks. Int. J. Prod. Res. 2002, 40, 4505–4522. [Google Scholar] [CrossRef]
- Gerkey, B.P.; Matarić, M.J. A market-based formulation of sensor-actuator network coordination. In Proceedings of the AAAI Spring Symposium on Intelligent Embedded and Distributed Systems, Stanford, CA, USA, 25–27 March 2002; pp. 21–26. [Google Scholar]
- Anussornnitisarn, P.; Nof, S.Y.; Etzion, O. Decentralized Control of Cooperative and Autonomous agents for solving the Distributed Resource Allocation Problem. Int. J. Prod. Econ. 2005, 98, 114–128. [Google Scholar] [CrossRef]
- Joordens, M.A.; Jamshidi, M. Consensus control for a system of under-water swarm robots. IEEE Syst. 2010, 4, 65–73. [Google Scholar] [CrossRef]
- Jones, C.; Shell, D.; Matarić, M.J.; Gerkey, B.P. Principled approaches to the design of multi-robot systems. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2004), Sendai, Japan, 28 September–2 October 2004. [Google Scholar]
- Nanjanath, M. Decision and coordination strategies for RoboCup rescue agents. In Proceedings of the Simulation, Modeling, and Programming for Autonomous Robots, Darmstadt, Germany, 15–18 November 2010; pp. 473–484. [Google Scholar]
- Lerman, K.; Jones, C.; Galstyan, A.; Matarić, M.J. Analysis of dynamic task allocation in multi-robot systems. Int. J. Robot. Res. 2006, 25, 225–242. [Google Scholar] [CrossRef]
- Parker, L.E.; Tang, F. Building multirobot coalitions through automated task solution synthesis. Proc. IEEE. 2006, 94, 1289–1305. [Google Scholar] [CrossRef]
- Chen, J.; Dong, S. Coalition-based approach to task allocation of multiple robots with resource constraints. IEEE Trans. Autom. Sci. Eng. 2012, 9, 516–528. [Google Scholar] [CrossRef]
- Ko, H.S.; Nof, S.Y. Design and application of task administration protocols for collaborative production and service systems. Int. J. Prod. Econ. 2012, 135, 177–189. [Google Scholar]
- Greve, G.H.; Hopkinson, K.M.; Lamont, G.B. Evolutionary sensor allocation for the Space Surveillance Network. J. Def. Model. Simul. 2017. [Google Scholar] [CrossRef]
- Dorigo, M.; Birattari, M.; Stützle, T. Ant colony optimization. IEEE Comput. Intell. Mag. 2006, 1, 28–39. [Google Scholar] [CrossRef]
- Bayındır, L. A review of swarm robotics tasks. Neurocomputing 2016, 172, 292–321. [Google Scholar] [CrossRef]
- Garnier, S.; Gautrais, J.; Theraulaz, G. The biological principles of swarm intelligence. Swarm Intell. 2007, 1, 3–31. [Google Scholar] [CrossRef]
- Blum, C.; Groß, G. Swarm intelligence in optimization and robotics. In Springer Handbook of Computational Intelligence; Springer: Berlin/Heidelberg, Germany, 2015; pp. 1291–1309. [Google Scholar]
- Poli, R.; Kennedy, J.; Blackwell, T. Particle swarm optimization. Swarm Intell. 2007, 1, 33–57. [Google Scholar] [CrossRef]
- Ball, M.G.; Qela, B.; Wesolkowski, S. A Review of the Use of Computational Intelligence in the Design of Military Surveillance Networks. In Recent Advances in Computational Intelligence in Defense and Security; Springer International Publishing: Cham, Switzerland, 2016; pp. 663–693. [Google Scholar]
- Bonabeau, E.; Dorigo, M.; Theraulaz, G. Swarm Intelligence: From Natural to Artificial Systems; Oxford University Press, Inc.: New York, NY, USA, 1999. [Google Scholar]
- Groβ, R.; Nouyan, S.; Bonani, M.; Mondada, F.; Dorigo, M. Division of labor in self-organized groups. In Proceedings of the 10th Intnational Conference on Simulation of Adaptive Behavior: From Animals to Animats, Osaka, Japan, 7–12 July 2008; Springer: Berlin, Germany, 2008; pp. 426–436. [Google Scholar]
- Upadhyay, D.; Banerjee, P. An Energy Efficient Proposed Framework for Time Synchronization Problem of Wireless Sensor Network. In Information Systems Design and Intelligent Applications; Springer: Visakhapatnam, India, 2016; pp. 377–385. [Google Scholar]
- Berman, S.; Halasz, A.; Kumar, V.; Pratt, S. Bio-inspired group behaviors for the deployment of a swarm of robots to multiple destinations. In Proceedings of the IEEE International Conference on Robotics and Automation, Roma, Italy, 10–14 April 2007; pp. 2318–2323. [Google Scholar]
- Tan, Y.; Ding, K. Survey of GPU-Based Implementation of Swarm Intelligence Algorithms. IEEE Trans. Cybern. 2016, 46, 2028–2041. [Google Scholar] [CrossRef] [PubMed]
- Labella, T.H.; Dorigo, M.; Deneubourg, J.L. Division of labor in a group of robots inspired by ants’ foraging behavior. ACM Trans. Auton. Adapt. Syst. 2006, 1, 4–25. [Google Scholar] [CrossRef]
- Zhang, S.Z.; Lee, C.K.M. An Improved Artificial Bee Colony Algorithm for the Capacitated Vehicle Routing Problem. In Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics (SMC), Kowloon, China, 9–12 October 2015; pp. 2124–2128. [Google Scholar]
- Xue, B.; Zhang, M.; Browne, W. Particle swarm optimization for feature selection in classification: A multi-objective approach. IEEE Trans. Cybern. 2013, 43, 1656–1671. [Google Scholar] [CrossRef] [PubMed]
- Fu, B.; Liang, Y.; Chen, C. Bio-inspired Group Modeling and Analysis for Intruder Detection in Mobile Sensor/Robotic Networks. IEEE Trans. Cybern. 2015, 45, 103–115. [Google Scholar] [CrossRef] [PubMed]
- Quijano, N.; Passino, K.M. Honey bee social foraging algorithms for resource allocation: Theory and application. Eng. Appl. Artif. Intell. 2010, 23, 845–861. [Google Scholar] [CrossRef]
- Jevtić, A.; Gutierrez, A.; Andina, D.; Jamshidi, M. Distributed Bees Algorithm for Task Allocation in Swarm of Robots. IEEE Syst. J. 2012, 6, 296–304. [Google Scholar] [CrossRef]
- Senanayake, M.; Senthooran, I.; Barca, J.C.; Chung, H.; Kamruzzaman, J.; Murshed, M. Search and tracking algorithms for swarms of robots: A survey. Robot. Auton. Syst. 2016, 75, 422–434. [Google Scholar] [CrossRef]
- Eberhart, R.C.; Shi, Y.; Kennedy, J. Swarm Intelligence; Elsevier: Amsterdam, The Netherlands, 2001. [Google Scholar]
- Jevtić, A.; Gutiérrez, A. Distributed bees algorithm parameters optimization for a cost efficient target al.location in swarms of robots. Sensors 2011, 11, 10880–10893. [Google Scholar] [CrossRef] [PubMed]
- Gutiérrez, A.; Campo, A.; Monasterio-Huelin, F.; Magdalena, L.; Dorigo, M. Collective decision-making based on social odometry. Neural Comput. Appl. 2010, 19, 807–823. [Google Scholar] [CrossRef]
- Ducatelle, F.; Di Caro, G.A.; Pinciroli, C.; Mondada, F.; Gambardella, L. Communication assisted navigation in robotic swarms: Self-organization and cooperation. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), San Francisco, CA, USA, 25–30 September 2011; pp. 4981–4988. [Google Scholar]
- Dias, M.B.; Zlot, R.; Kalra, N.; Stentz, A. Market-based multirobot coordination: A survey and analysis. Proc. IEEE 2006, 94, 1257–1270. [Google Scholar] [CrossRef]
- Tang, F.; Parker, L.E. Asymtre: Automated synthesis of multi-robot task solutions through software reconfiguration. In Proceedings of the IEEE International Conference on Robotics and Automation, Barcelona, Spain, 18–22 April 2005; pp. 1501–1508. [Google Scholar]
- Neapolitan, R.E.; Naimipour, K. Foundations of Algorithms; D. C. Heath and Company: Lexington, MA, USA, 1996. [Google Scholar]
- Coello, C.A.; Lamont, G.B.; Van Veldhuizen, D.A. Evolutionary Algorithms for Solving Multi-Objective Problems; Springer: New York, NY, USA, 2007; Volume 5, pp. 21–22. [Google Scholar]
- Tkach, I.; Edan, Y.; Nof, S.Y. Multi-sensor task allocation framework for supply networks security using task administration protocols. Int. J. Prod. Res. 2017, 55, 5202–5224. [Google Scholar] [CrossRef]
- Tang, Z.; Ozguner, U. Motion Planning for Multitarget Surveillance with Mobile Sensor Agents. IEEE Trans. Robot. 2005, 21, 898–908. [Google Scholar] [CrossRef]
- Lee, C.K.H.; Ho, G.T.S.; Choy, K.L.; Pang, G.K.H. A RFID-based Recursive Process Mining System for Quality Assurance in the Garment Industry. Int. J. Prod. Res. 2014, 52, 4216–4238. [Google Scholar] [CrossRef]
- Zhang, J.; Li, W.; Han, N.; Kan, J. Forest Fire Detection System Based on a ZigBee Wireless Sensor Network. Front. For. China 2008, 3, 369–374. [Google Scholar] [CrossRef]
- Robin, C.; Lacroix, S. Multi-robot target detection and tracking: Taxonomy and survey. Auton. Robots 2016, 40, 729–760. [Google Scholar] [CrossRef]
- Byers, J.; Nasser, G. Utility-Based Decision-Making in Wireless Sensor Networks. In Proceedings of the 1st ACM international symposium on Mobile ad hoc networking & computing, Boston, MA, USA, 11 August 2000; pp. 143–144. [Google Scholar]
- Yoon, Y.; Kim, Y.H. An efficient genetic algorithm for maximum coverage deployment in wireless sensor networks. IEEE Trans. Cybern. 2013, 43, 1473–1483. [Google Scholar] [CrossRef] [PubMed]
- Jeong, W.; Nof, S.Y. A collaborative sensor network middleware for automated production systems. Int. J. Comput. Ind. Eng. 2009, 57, 106–113. [Google Scholar] [CrossRef]
- Dorigo, M.; Maniezzo, V.; Colorni, A. Ant system: Optimization by a colony of cooperating agents. IEEE Tran. Syst. Man Cybern. B Cybern. 1996, 26, 29–41. [Google Scholar] [CrossRef] [PubMed]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
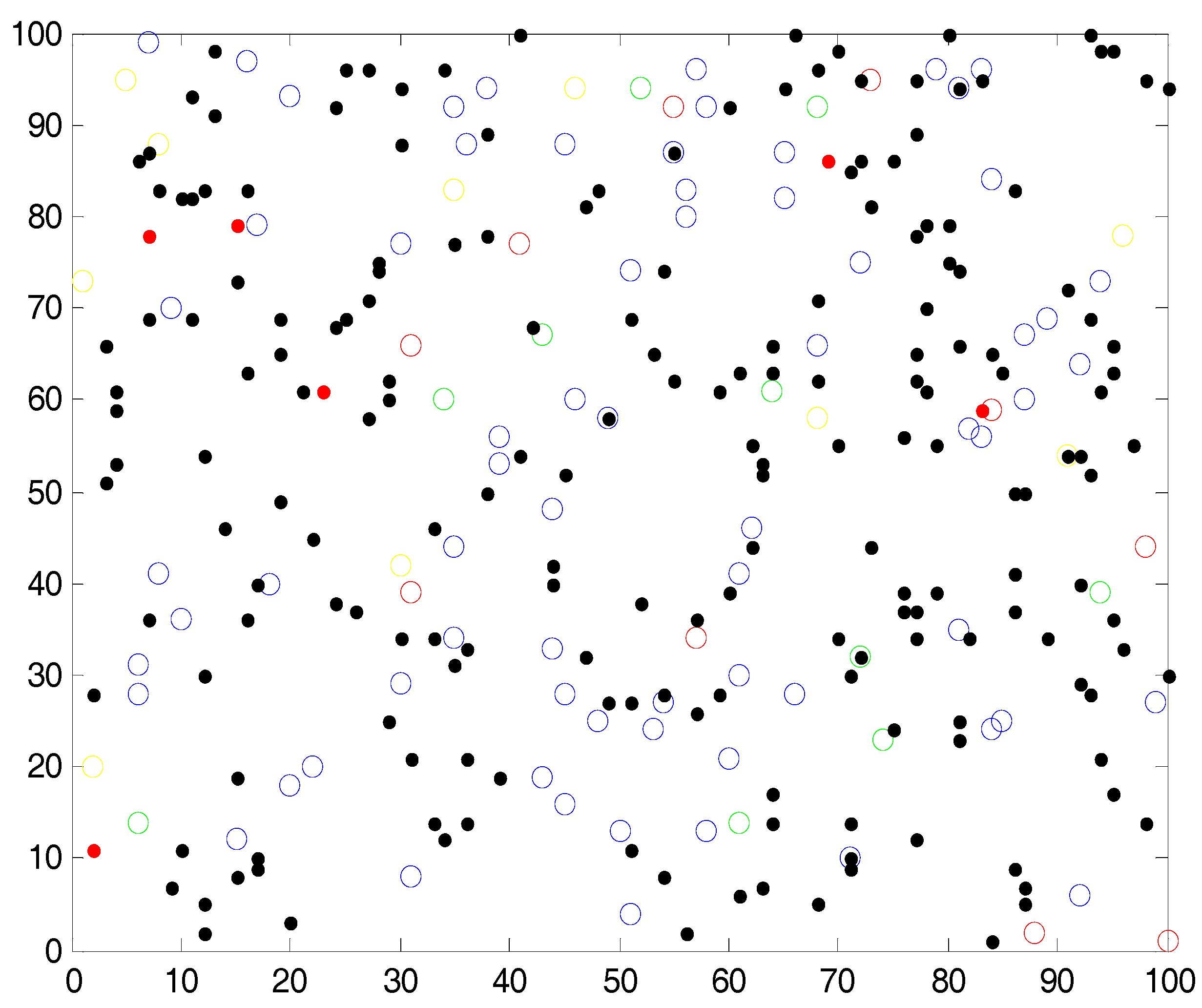
| Area dimensions | 100 × 100 m |
| Number of sensors (‘bees’) | 20, 40, 60, 80, 100 |
| Number of tasks | 200 |
| Task completion time | Randomly distributed from 0 to 10 min |
| Simulation duration | 200 steps |
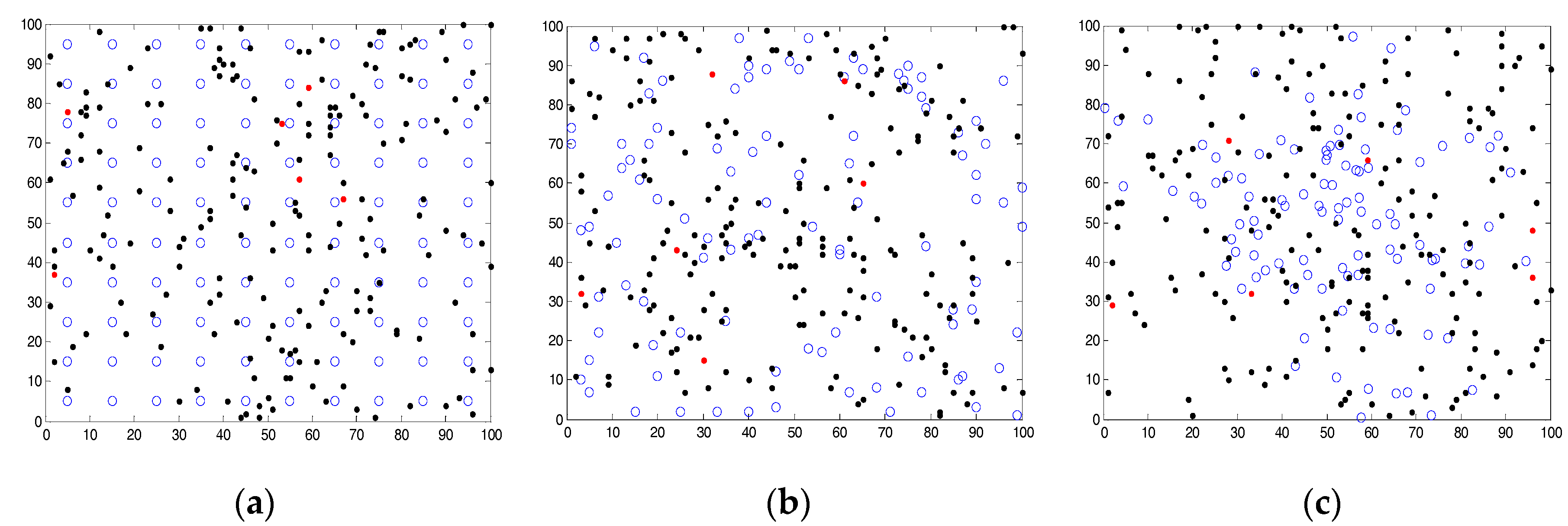
| Tasks location | Uniformly distributed at random |
| Control parameters | α = β = γ = 1, α = 2β = 2γ, α = 2β = γ, α = 2β = 0.5γ |
| Sensors location | Uniformly distributed random |
| Normally distributed random | |
| Grid deployment | |
| Tasks arrival time | Every 1 step |
| Sensors range coverage | Predefined from 15 to 45 m |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tkach, I.; Jevtić, A.; Nof, S.Y.; Edan, Y. A Modified Distributed Bees Algorithm for Multi-Sensor Task Allocation. Sensors 2018, 18, 759. https://doi.org/10.3390/s18030759
Tkach I, Jevtić A, Nof SY, Edan Y. A Modified Distributed Bees Algorithm for Multi-Sensor Task Allocation. Sensors. 2018; 18(3):759. https://doi.org/10.3390/s18030759
Chicago/Turabian StyleTkach, Itshak, Aleksandar Jevtić, Shimon Y. Nof, and Yael Edan. 2018. "A Modified Distributed Bees Algorithm for Multi-Sensor Task Allocation" Sensors 18, no. 3: 759. https://doi.org/10.3390/s18030759
APA StyleTkach, I., Jevtić, A., Nof, S. Y., & Edan, Y. (2018). A Modified Distributed Bees Algorithm for Multi-Sensor Task Allocation. Sensors, 18(3), 759. https://doi.org/10.3390/s18030759