Event-Triggered Fault Estimation for Stochastic Systems over Multi-Hop Relay Networks with Randomly Occurring Sensor Nonlinearities and Packet Dropouts

Abstract
:1. Introduction
- (1)
- A co-design algorithm of event-triggered state and fault estimator is presented for a class of linear stochastic system, for the first time, to deal with the phenomena of simultaneous randomly occurring nonlinearity and randomly occurring packet dropouts, which reflects the reality closely. An upper bound of state and fault error covariances is minimized by appropriately designing the desired estimator gain.
- (2)
- A Sufficient condition and a data-forwarding scheme are given such that the error covariance is mean-square bounded in the multi-hop relay links with random packet dropouts. Such data-forwarding scheme enables each relay node to forward the estimated values to the remote estimator.
- (3)
- Implementation issues of the theoretical results are discussed. A new data-forwarding communication protocol that could be applied to our addressed topology is designed; this involves hardware design and the corresponding procedure implementation. The proposed communication protocol and theoretical results are verified in a classical industry-like process.
2. Problem Statement
3. Main Results
3.1. A Co-Design Algorithm of Event-Triggered State and Fault Estimator
- (a)
- For the phenomenon of packet loss and randomly occurring sensor nonlinearities, an upper bound of the error covariance is derived, i.e., there exists a sequence of positive-definite matrices that satisfies
- (b)
- The sequence of upper bound is minimized by the designed estimator gain through a recursive scheme.
3.2. Data Forwarding with Packet Dropouts
| Algorithm 1 Event-triggered data-forwarding scheme |
| At each time instant k, the relay node i executes: initialization and ;
|
4. Experimental Verification
4.1. A New Transmission Protocol for Data Forwarding Scheme
| Algorithm 2 The implementation steps for the new transmission protocol |
| When the data packet is requested to be sent from the relay node i to the relay node , the following steps are performed: Step 1: For relay node i, the computation module sends a specified digital signal to the transmitter through I/O ports. Step 2: For relay node i, the switching module turns on the power of WTM. Step 3: The transmitter of relay node i sends a signal to the receiver of relay node . Step 4: For relay node , the receiver sends a specified digital signal to wake up the computation module by I/O ports. Step 5: For relay node , the computation module requires switching module to power on the WTM. Step 6: The WTM of relay node i forwards data packets to the WTM of relay node . Step 7: For relay node i, the switching module turns off the power of WTM after the end of transmission. end |
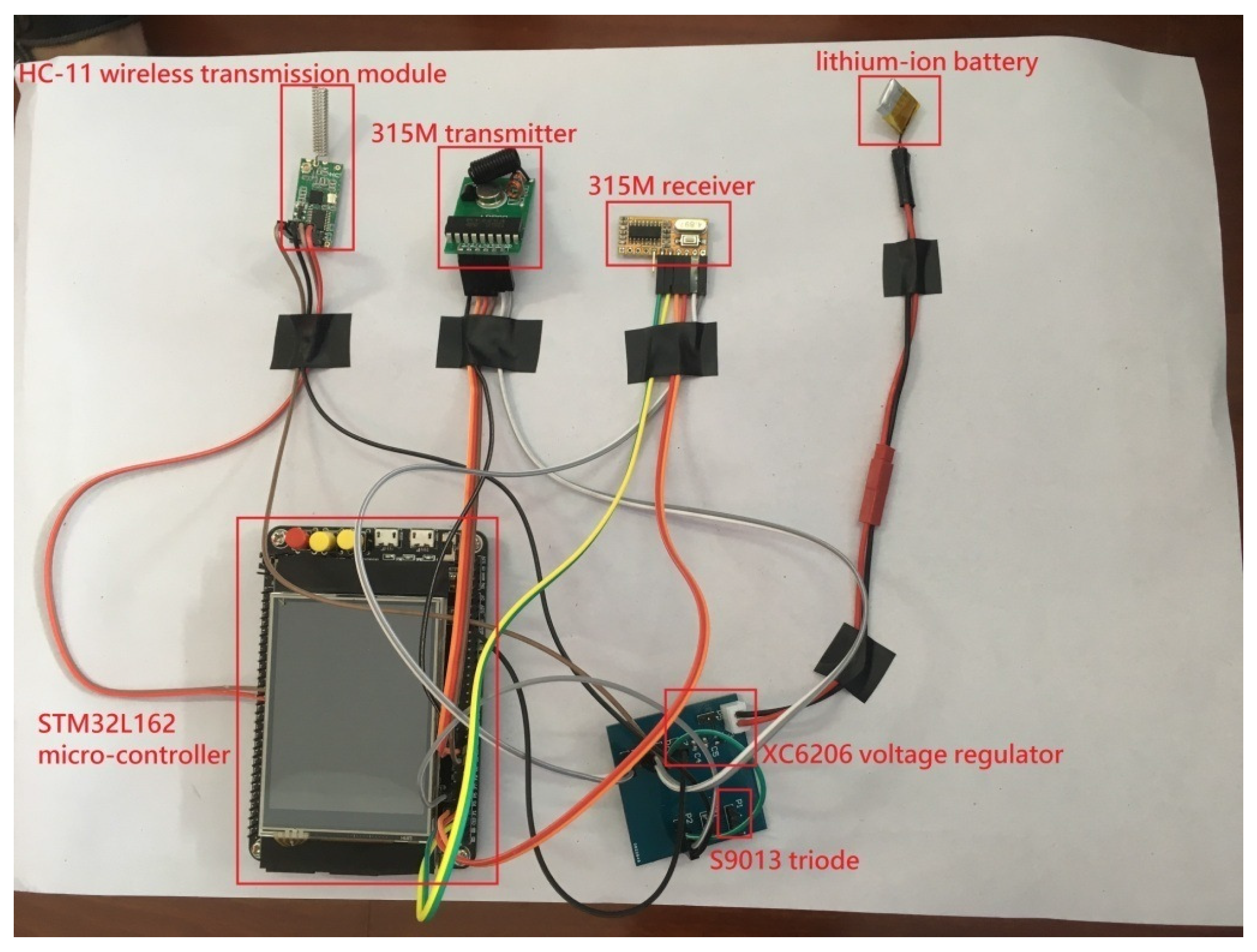
4.1.1. Hardware Design for the Experiment
4.1.2. Implementation of the Experiment
| Algorithm 3 The active mode for Node i |
| When Node i sends the data packet to Node , the following steps will be performed: Step 1: For Node i: STM32 sends a signal to 315M transmitter and activates HC-11. Step 2: For Node : 315M receiver activates STM32 then activates HC-11. Step 3: Node i forwards data packets to Node . Step 4: For Node i: turns off HC-11. end |
| Algorithm 4 The sleep mode for Node i |
| When Node i is not allowed to send the data packet to Node , the following steps will be performed: Step 1: For Node i: STM32 and 315M transmitters enter an idle state and the HC-11 is not turned on. Step 2: For Node : STM32 calculates the corresponding decision to determine whether or not sending data packets based on the proposed data-forwarding scheme. The 315M receiver enters an idle state then HC-11 is not turned on. end |
| Algorithm 5 Data validation |
| When sending the data packets from Node 1 to Node 2 (or from Node 2 to Node 3), the following procedures will be executed: initialization ;
|
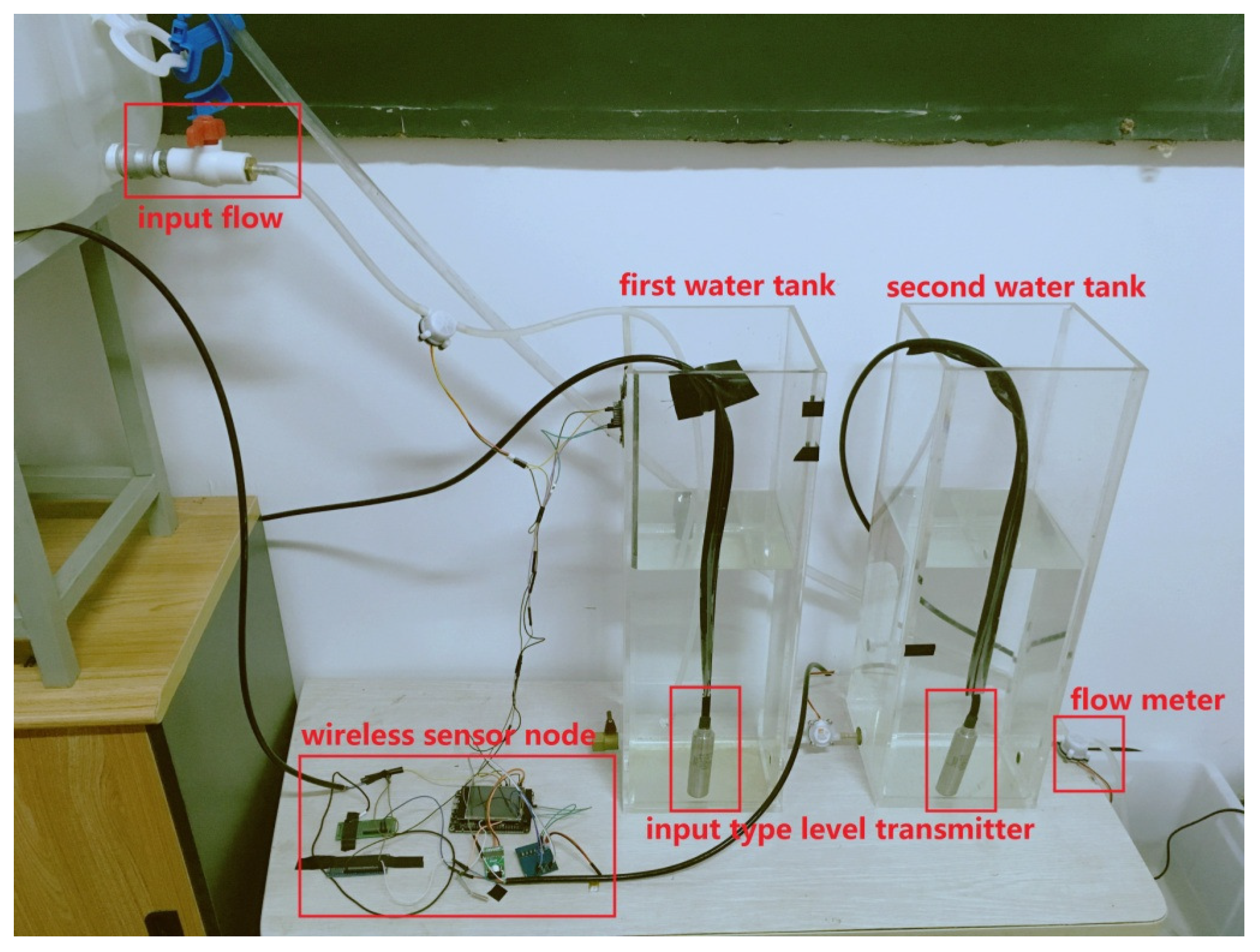
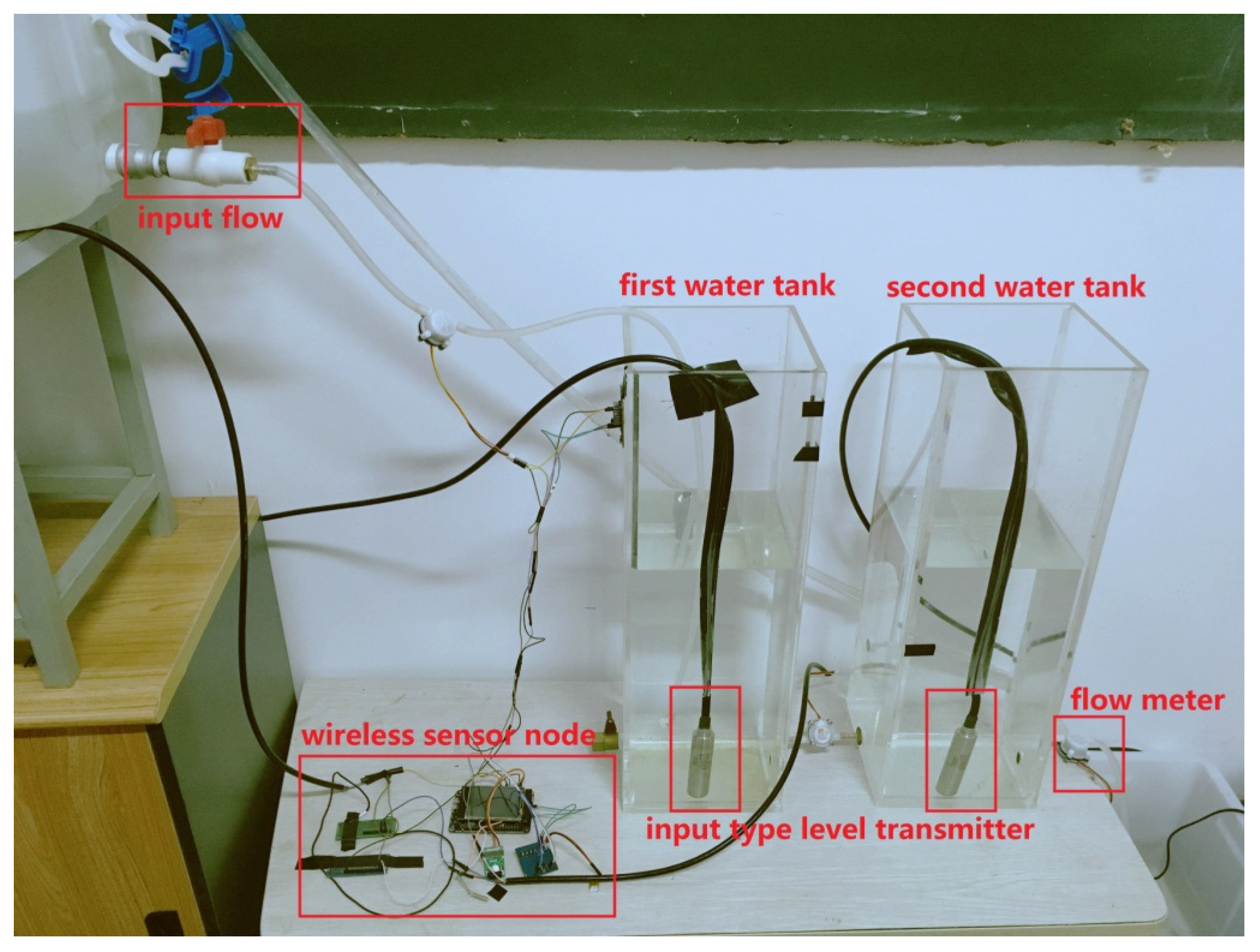
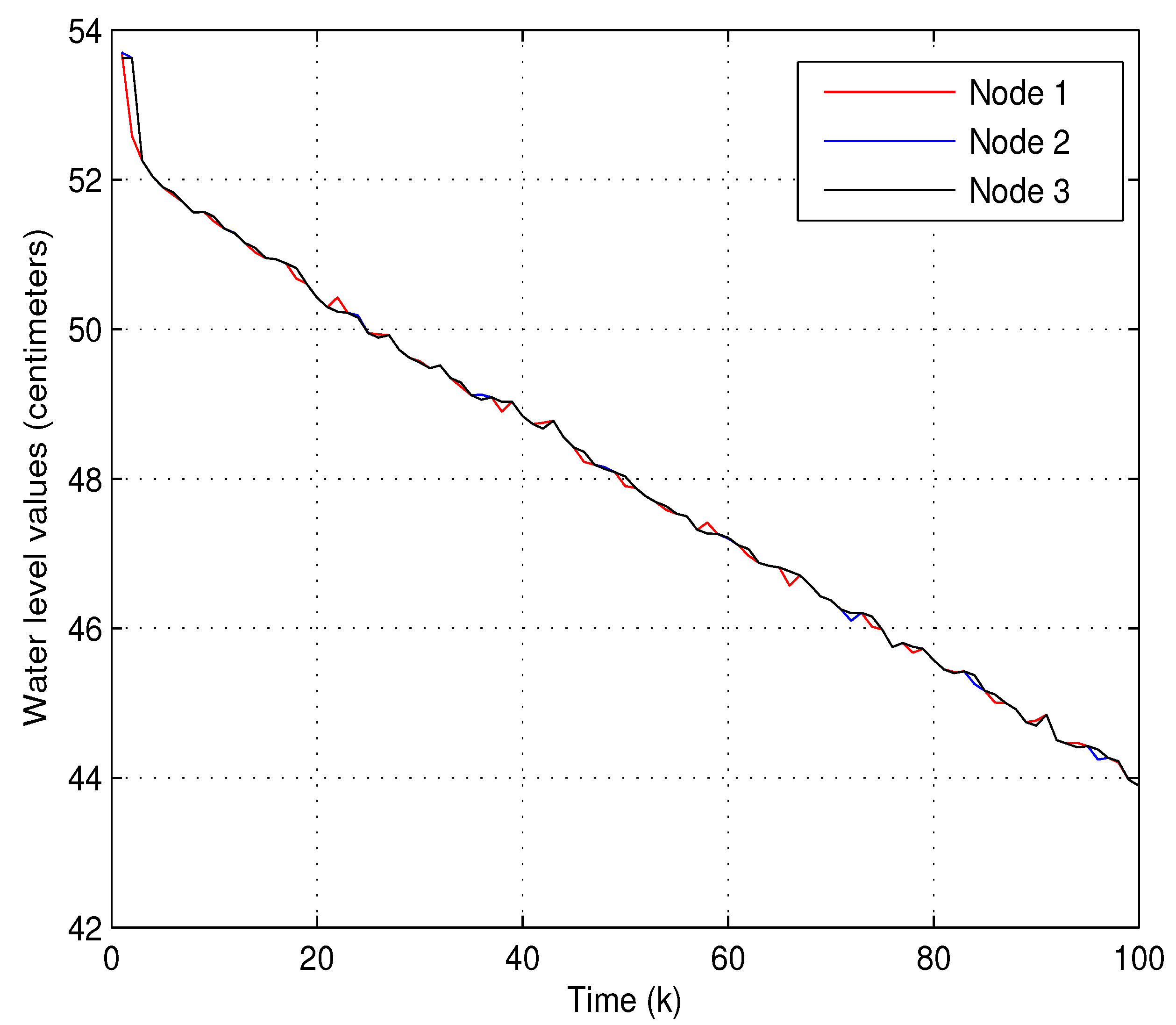
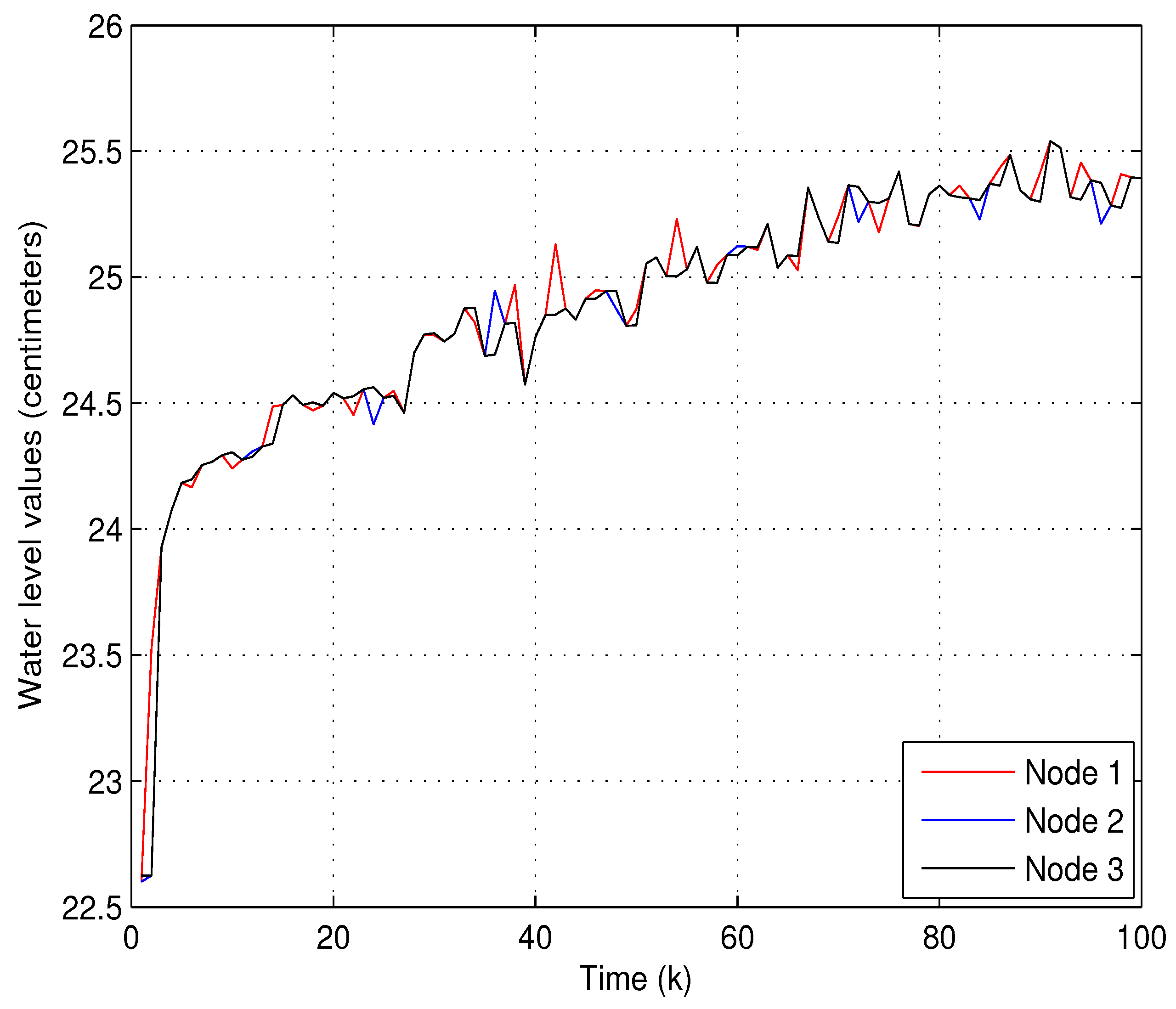
4.2. System Description and Modeling of the Twin Water-Tank System
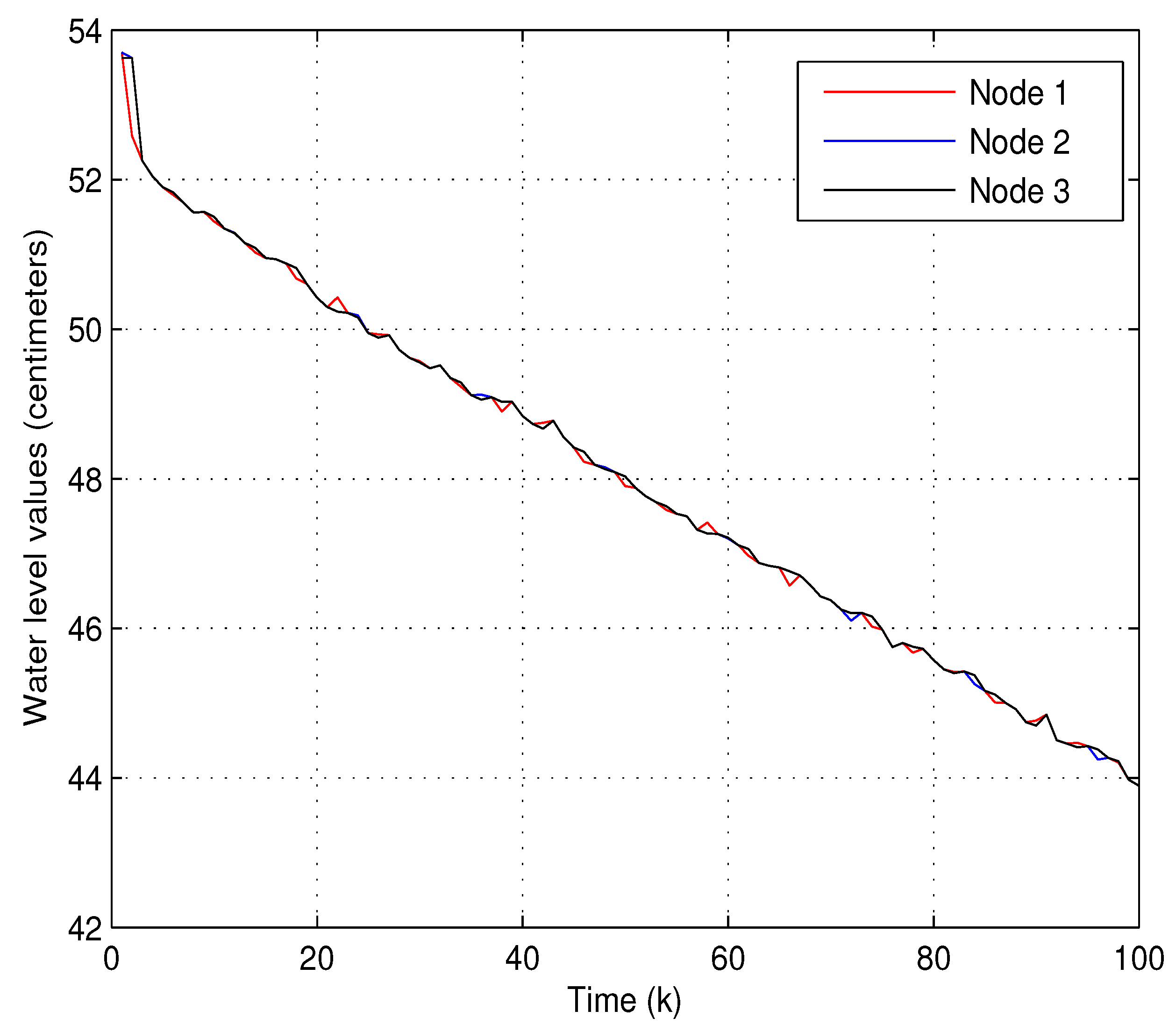
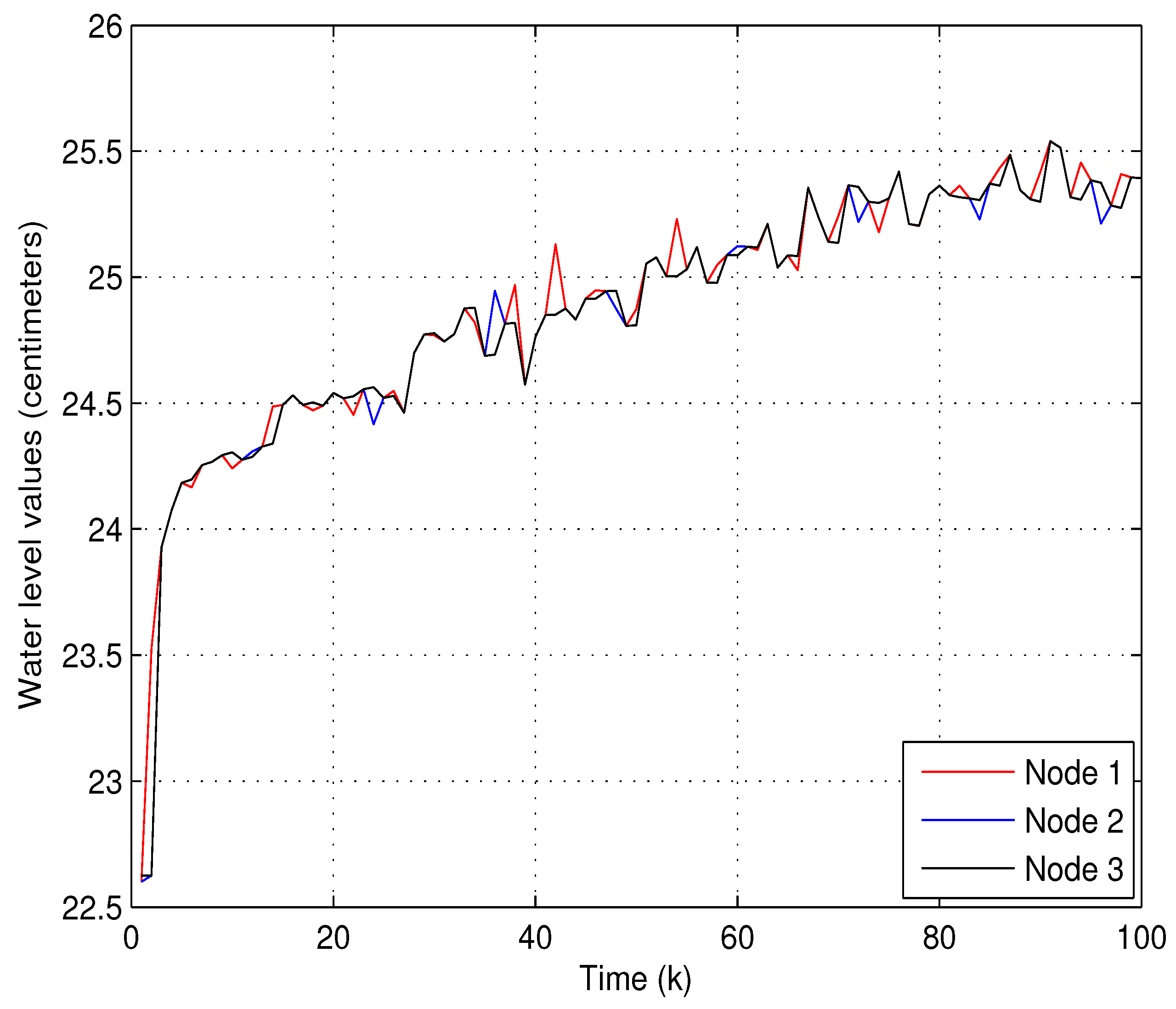
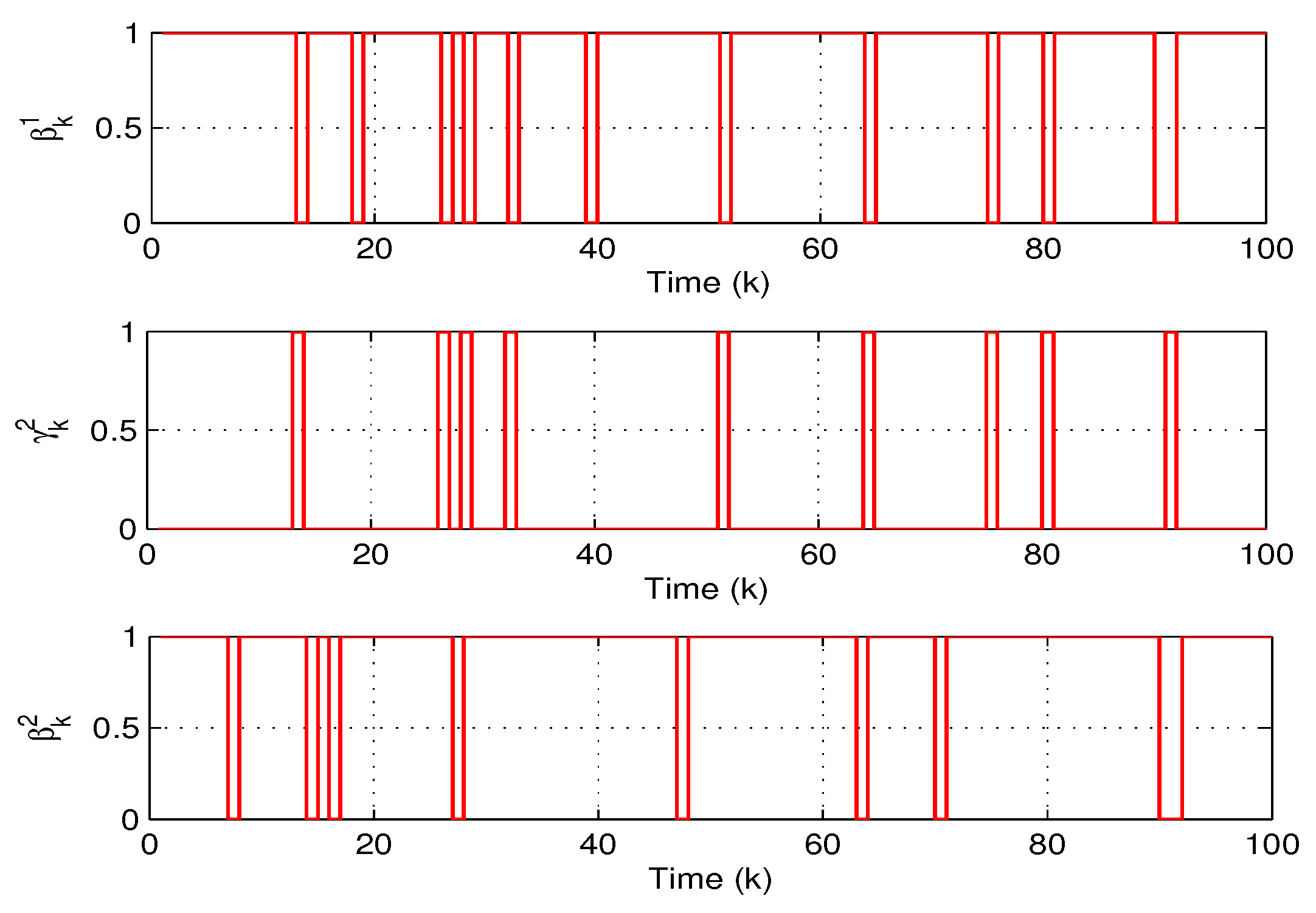
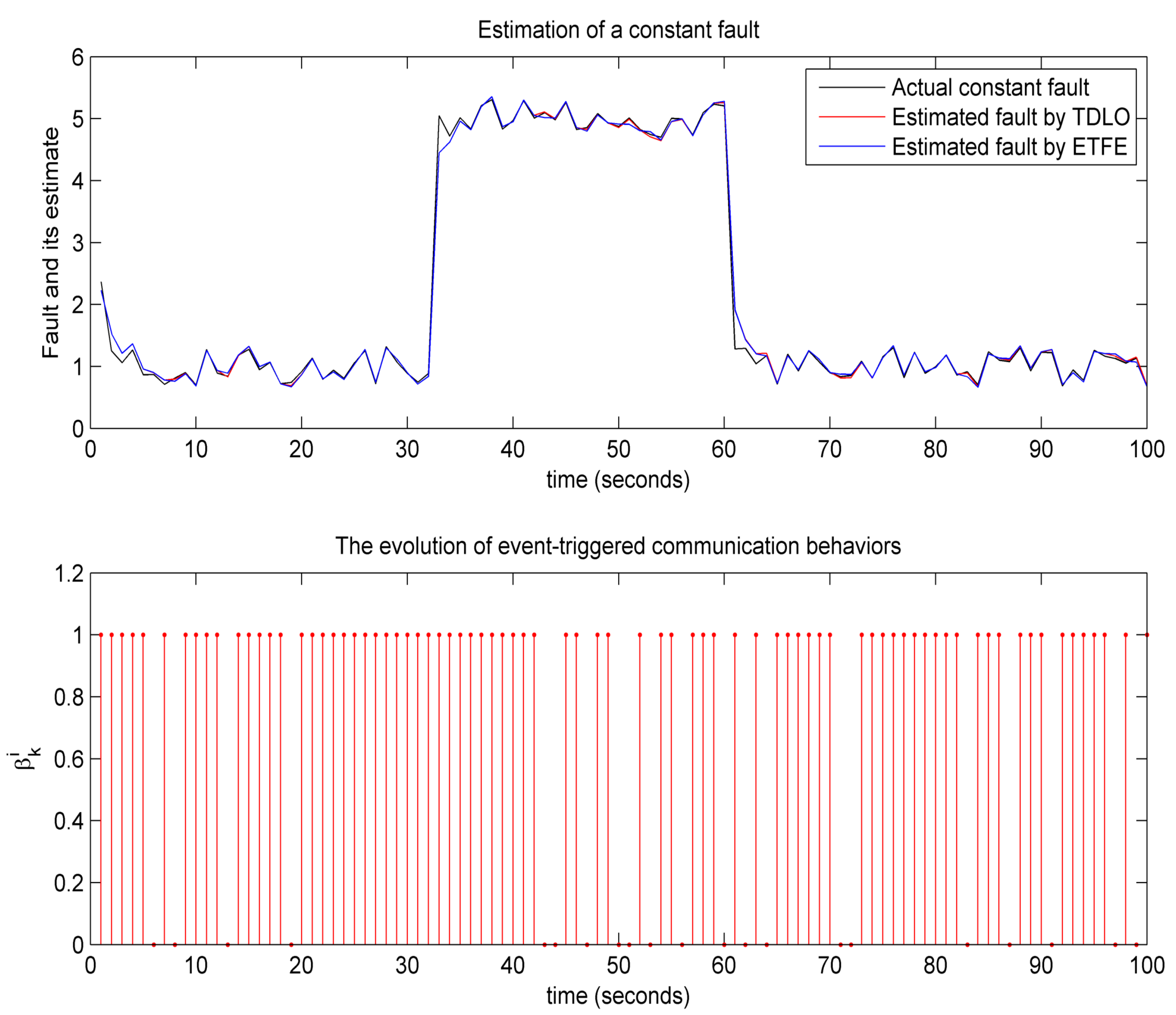
4.3. Assessment of Effectiveness of the Theoretical Results
5. Conclusions and Further Work
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Rashvand, H.F.; Abedi, A.; Alcaraz-Calero, J.M.; Mitchell, P.D.; Mukhopadhyay, S.C. Wireless sensor systems for space and extreme environments: A review. IEEE Sens. J. 2014, 14, 3955–3970. [Google Scholar] [CrossRef]
- Niu, Y.; Ho, D.W.C.; Li, C.W. Filtering for discrete fuzzy stochastic systems with sensor nonlinearities. IEEE Trans. Fuzzy Syst. 2010, 18, 971–978. [Google Scholar] [CrossRef]
- Jia, Q.; Chen, W.; Zhang, Y.; Li, H. Fault reconstruction and fault-tolerant control via learning observers in Takagi-Sugeno fuzzy descriptor systems with time delays. IEEE Trans. Ind. Electron. 2015, 62, 3885–3895. [Google Scholar] [CrossRef]
- Chen, W.; Chen, W.T.; Saif, M.; Li, M.F.; Wu, H. Simultaneous Fault Isolation and Estimation of Lithium-Ion Batteries via Synthesized Design of Luenberger and Learning Observers. IEEE Trans. Control Syst. Technol. 2014, 22, 290–298. [Google Scholar] [CrossRef]
- Ovsthus, K.; Kristensen, L.M. An industrial perspective on wireless sensor networks—A survey of requirements, protocols, and challenges. IEEE Commun. Surv. Tutor. 2014, 16, 1391–1412. [Google Scholar] [CrossRef]
- Zhang, L.; Gao, H.; Kaynak, O. Network-induced constraints in networked control systems—A survey. IEEE Trans. Ind. Inform. 2013, 9, 403–416. [Google Scholar] [CrossRef]
- Zhang, X.M.; Han, Q.L.; Yu, X. Survey on recent advances in networked control systems. IEEE Trans. Ind. Inform. 2016, 12, 1740–1752. [Google Scholar] [CrossRef]
- Zhang, X.M.; Han, Q.L. Network-based H∞ filtering using a logic jumping-like trigger. Automatica 2013, 49, 1428–1435. [Google Scholar] [CrossRef]
- Patton, R.J.; Chen, J. Observer-based fault detection and isolation: Robustness and applications. Control Eng. Pract. 1997, 5, 671–682. [Google Scholar] [CrossRef]
- Xiong, Y.; Saif, M. Unknown disturbance inputs estimation based on a state functional observer design. Automatica 2003, 39, 1389–1398. [Google Scholar] [CrossRef]
- Alavi, S.M.M.; Saif, M. Fault detection in nonlinear stable systems over lossy networks. IEEE Trans. Control Syst. Technol. 2013, 21, 2129–2142. [Google Scholar] [CrossRef]
- Zhang, Y.; Chen, W.; Chen, X.; Jia, Q. Robust fault reconstruction via learning observers in linear parameter-varying systems subject to loss of actuator effectiveness. IET Control Theory Appl. 2014, 8, 42–50. [Google Scholar] [CrossRef]
- Shi, P.; Zhang, Y.; Chadli, M.; Agarwal, R.K. Mixed H-Infinity and Passive Filtering for Discrete Fuzzy Neural Networks With Stochastic Jumps and Time Delays. IEEE Trans. Neural Netw. Learn. Syst. 2016, 27, 903–909. [Google Scholar] [CrossRef] [PubMed]
- Chadli, M.; Abdo, A.; Ding, S.X. H−/H∞ fault detection filter design for discrete-time Takagi-Sugeno fuzzy system. Automatica 2013, 49, 1996–2005. [Google Scholar] [CrossRef]
- Chen, W.; Saif, M. An iterative learning observer for fault detection and accommodation in nonlinear time-delay systems. Int. J. Robust Nonlinear Control 2006, 16, 1–19. [Google Scholar] [CrossRef]
- Youssef, T.; Chadli, M.; Karimi, H.R.; Wang, R. Actuator and sensor faults estimation based on proportional integral observer for TS fuzzy model. J. Frankl. Inst. 2017, 354, 2524–2542. [Google Scholar] [CrossRef]
- Li, F.; Shi, P.; Lim, C.C.; Wu, L. Fault detection filtering for nonhomogeneous markovian jump systems via fuzzy approach. IEEE Trans. Fuzzy Syst. 2017, 26, 131–141. [Google Scholar] [CrossRef]
- Chibani, A.; Chadli, M.; Braiek, N.B. A sum of squares approach for polynomial fuzzy observer design for polynomial fuzzy systems with unknown inputs. Int. J. Control Autom. Syst. 2016, 14, 323–330. [Google Scholar] [CrossRef]
- Chen, W.; Chowdhury, F.N. Simultaneous identification of time-varying parameters and estimation of system states using iterative learning observers. Int. J. Syst. Sci. 2007, 38, 39–45. [Google Scholar] [CrossRef]
- Jia, Q.; Chen, W.; Zhang, Y.; Chen, X. Fault Reconstruction and Accommodation in Linear Parameter-Varying Systems via Learning Unknown-Input Observers. J. Dyn. Syst. Meas. Control 2015, 137, 0610081–0610089. [Google Scholar] [CrossRef]
- Chibani, A.; Chadli, M.; Peng, S.; Braiek, N.B. Fuzzy fault detection filter design for t-s fuzzy systems in finite frequency domain. IEEE Trans. Fuzzy Syst. 2017, 25, 1051–1061. [Google Scholar] [CrossRef]
- NaNacara, W.; Yaz, E.E. Recursive estimator for linear and nonlinear systems with uncertain observations. Signal Process. 1997, 62, 215–228. [Google Scholar] [CrossRef]
- Wang, Z.; Shen, B.; Liu, X. H∞ filtering with randomly occurring sensor saturations and missing measurements. Automatica 2012, 48, 556–562. [Google Scholar] [CrossRef]
- Wu, Z.G.; Shi, P.; Su, H.; Chu, J. Asynchronous ℓ2-ℓ∞ filtering for discrete-time stochastic Markov jump systems with randomly occurred sensor nonlinearities. Automatica 2014, 50, 180–186. [Google Scholar] [CrossRef]
- Miskowicz, M. Send-on-delta concept: An event-based data reporting strategy. Sensors 2006, 6, 49–63. [Google Scholar] [CrossRef]
- Suh, Y.S.; Nguyen, V.H.; Ro, Y.S. Modified Kalman filter for networked monitoring systems employing a send-on-delta method. Automatica 2007, 43, 332–338. [Google Scholar] [CrossRef]
- Mao, J.; Ding, D.; Song, Y.; Liu, Y.; Alsaadi, F.E. Event-based recursive filtering for time-delayed stochastic nonlinear systems with missing measurements. Signal Process. 2017, 134, 158–165. [Google Scholar] [CrossRef]
- Meng, X.; Chen, T. Optimality and stability of event triggered consensus state estimation for wireless sensor networks. In Proceedings of the American Control Conference, Portland, OR, USA, 4–6 June 2014; pp. 3565–3570. [Google Scholar]
- Heemels, W.P.M.H.; Johansson, K.H.; Tabuada, P. An introduction to event-triggered and self-triggered control. In Proceedings of the IEEE Conference on Decision and Control, Maui, HI, USA, 10–13 December 2012; pp. 3270–3285. [Google Scholar]
- Lunze, J. Event-Based Control: Introduction and Survey. In Event-Based Control and Signal Processing; CRC Press: Boca Raton, FL, USA, 2015; pp. 3–20. [Google Scholar]
- Chen, T.; Meng, X. Event triggered robust filter design for discrete-time systems. IET Control Theory Appl. 2014, 8, 104–113. [Google Scholar] [CrossRef]
- Meng, X.; Chen, T. Event-based stabilization over networks with transmission delays. J. Control Sci. Eng. 2012. [Google Scholar] [CrossRef]
- Han, D.; Mo, Y.; Wu, J.; Weerakkody, S.; Sinopoli, B.; Shi, L. Stochastic event-triggered sensor schedule for remote state estimation. IEEE Trans. Autom. Control 2015, 60, 2661–2675. [Google Scholar] [CrossRef]
- Diazcacho, M.; Delgado, E.; Barreiro, A.; Falcón, P. Basic send-on-delta sampling for signal tracking-error reduction. Sensors 2017, 17, 312. [Google Scholar] [CrossRef] [PubMed]
- Socas, R.; Dormido, S.; Dormido, R.; Fabregas, E. Event-based control strategy for mobile robots in wireless environments. Sensors 2015, 15, 30076–30092. [Google Scholar] [CrossRef] [PubMed]
- Socas, R.; Dormido, R.; Dormido, S. New Control Paradigms for Resources Saving: An Approach for Mobile Robots Navigation. Sensors 2018, 18, 281. [Google Scholar] [CrossRef] [PubMed]
- Putra, P.E.S.; Brusey, J.; Gaura, E.; Vesilo, R. An Event-Triggered Machine Learning Approach for Accelerometer-Based Fall Detection. Sensors 2018, 18, 20. [Google Scholar] [CrossRef] [PubMed]
- Xu, Z.; Liu, G.; Yan, H.; Cheng, B.; Lin, F. Trail-based search for efficient event report to mobile actors in wireless sensor and actor networks. Sensors 2017, 17, 2468. [Google Scholar] [CrossRef] [PubMed]
- Santos, C.; Martínez-Rey, M.; Espinosa, F.; Gardel, A.; Santiso, E. Event-based sensing and control for remote robot guidance: An experimental case. Sensors 2017, 17, 2034. [Google Scholar] [CrossRef] [PubMed]
- Acho, L. Event-driven observer-based smart-sensors for output feedback control of linear systems. Sensors 2017, 17, 2028. [Google Scholar] [CrossRef] [PubMed]
- Ravankar, A.; Ravankar, A.A.; Kobayashi, Y.; Emaru, T. Symbiotic navigation in multi-robot systems with remote obstacle knowledge sharing. Sensors 2017, 17, 1581. [Google Scholar] [CrossRef] [PubMed]
- Dong, H.; Wang, Z.; Ding, S.X.; Gao, H. Finite-horizon estimation of randomly occurring faults for a class of nonlinear time-varying systems. Automatica 2014, 50, 3182–3189. [Google Scholar] [CrossRef]
- Dong, H.L.; Wang, Z.D.; Ding, S.X.; Gao, H.J. On H-infinity Estimation of Randomly Occurring Faults for A Class of Nonlinear Time-Varying Systems with Fading Channels. IEEE Trans. Autom. Control 2016, 61, 479–484. [Google Scholar] [CrossRef]
- Chang, J.L. Applying discrete-time proportional integral observers for state and disturbance estimations. IEEE Trans. Autom. Control 2005, 51, 814–818. [Google Scholar] [CrossRef]
- Hu, J.; Liu, S.; Ji, D.; Li, S. On co-design of filter and fault estimator against randomly occurring nonlinearities and randomly occurring deception attacks. Int. J. Gen. Syst. 2016, 45, 619–632. [Google Scholar] [CrossRef]
- Yue, D. Robust stabilization of uncertain systems with unknown input delay. Automatica 2004, 40, 331–336. [Google Scholar] [CrossRef]
- Calafiore, G. Reliable localization using set-valued nonlinear filters. IEEE Trans. Syst. Man Cybern. Part A Syst. Hum. 2005, 35, 189–197. [Google Scholar] [CrossRef]
- Shi, L.; Johansson, K.H.; Qiu, L. Time and event-based sensor scheduling for networks with limited communication resources. IFAC Proc. Vol. (IFAC-PapersOnline) 2011, 44, 13263–13268. [Google Scholar] [CrossRef]
- Schenato, L. Optimal estimation in networked control systems subject to random delay and packet drop. IEEE Trans. Autom. Control 2008, 53, 1311–1317. [Google Scholar] [CrossRef]
- Li, S.; Sauter, D.; Xu, B. Fault isolation filter for networked control system with event-triggered sampling scheme. Sensors 2011, 11, 557–572. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Li, P.; Chen, W. An energy-efficient data transmission scheme for remote state estimation and applications to a water-tank system. ISA Trans. 2017, 70, 494–501. [Google Scholar] [CrossRef] [PubMed]
- USR-C322 User Manual, USR IOT Experts. 2017. Available online: http://www.usriot.com/p/ti-cc3200-wifi-modules/ (accessed on 17 May 2017).
- STM32 Reference Manual, STMicroelectronics. 2017. Available online: http://www.st.com/content/stcom/en/products/microcontrollers/stm32-32-bit-arm-cortex-mcus/stm32l1-series/stm32l162/stm32l162zd.html (accessed on 22 January 2017).
- HC-11 Reference Manual. 2017. Available online: https://www.elecrow.com/download/HC-11.eps (accessed on 22 January 2017).
- Versteeg, H.K.; Malaskekera, W. An Introduction to Computational Fluid Dynamics; Pearson Education Limited: London, UK, 2007; ISBN 9780131274983. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 0.12 | 0.16 | 0.22 | 0.26 | 0.32 | 0.36 | 0.42 | 0.46 | |
| An upper bound of error covariance | 0.231 | 0.24 | 0.373 | 0.381 | 0.396 | 0.412 | 0.438 | 0.466 |
| (i = 1 and 2) | 0.12 | 0.16 | 0.22 | 0.26 | 0.32 | 0.36 | 0.42 | 0.46 |
| An upper bound of error covariance | 0.315 | 0.362 | 0.397 | 0.416 | 0.478 | 0.503 | 0.612 | 0.681 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Peng, L. Event-Triggered Fault Estimation for Stochastic Systems over Multi-Hop Relay Networks with Randomly Occurring Sensor Nonlinearities and Packet Dropouts. Sensors 2018, 18, 731. https://doi.org/10.3390/s18030731
Li Y, Peng L. Event-Triggered Fault Estimation for Stochastic Systems over Multi-Hop Relay Networks with Randomly Occurring Sensor Nonlinearities and Packet Dropouts. Sensors. 2018; 18(3):731. https://doi.org/10.3390/s18030731
Chicago/Turabian StyleLi, Yunji, and Li Peng. 2018. "Event-Triggered Fault Estimation for Stochastic Systems over Multi-Hop Relay Networks with Randomly Occurring Sensor Nonlinearities and Packet Dropouts" Sensors 18, no. 3: 731. https://doi.org/10.3390/s18030731
APA StyleLi, Y., & Peng, L. (2018). Event-Triggered Fault Estimation for Stochastic Systems over Multi-Hop Relay Networks with Randomly Occurring Sensor Nonlinearities and Packet Dropouts. Sensors, 18(3), 731. https://doi.org/10.3390/s18030731