An Automatic and Novel SAR Image Registration Algorithm: A Case Study of the Chinese GF-3 Satellite



Abstract
1. Introduction
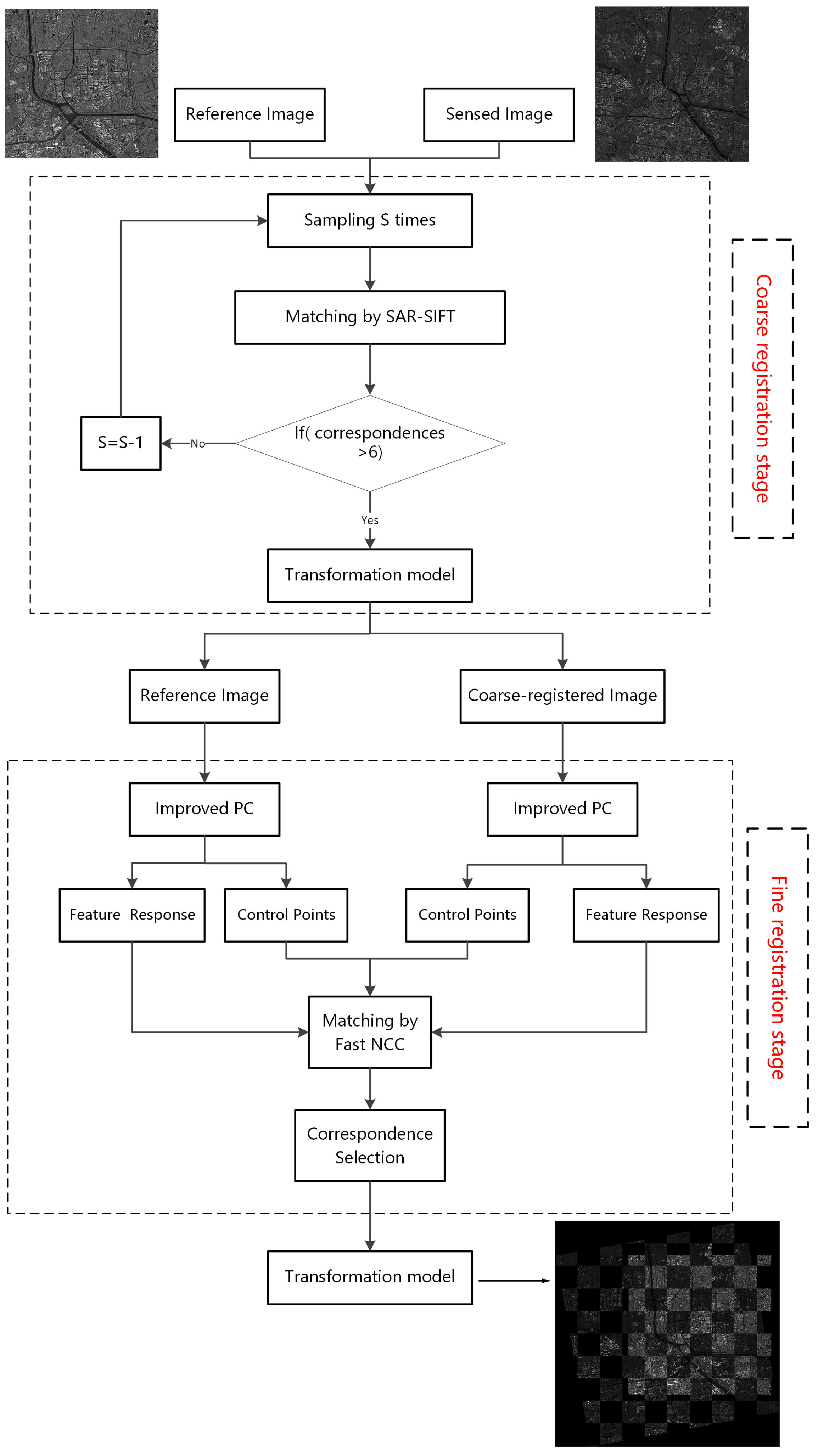
- A new coarse to fine automatic registration scheme is designed. Both the SAR-SIFT algorithm used in the coarse registration and the improved phase congruency model used in the fine registration are robust to speckle in SAR images. The fast NCC of the improved phase congruency is used as a new similarity measure in the fine registration.
- An adaptive sampling method used in the coarse registration is proposed, which decreases the computational cost while maintaining the matching performance. A correspondence selection strategy is introduced to remove outliers.
- To our best knowledge, this is the first paper to introduce an automatic, robust and efficient registration algorithm for the Chinese GF-3 SAR images of different imaging modes.
2. The Chinese GF3 Satellite
3. Methodology
3.1. Coarse Registration
3.2. Fine Registration
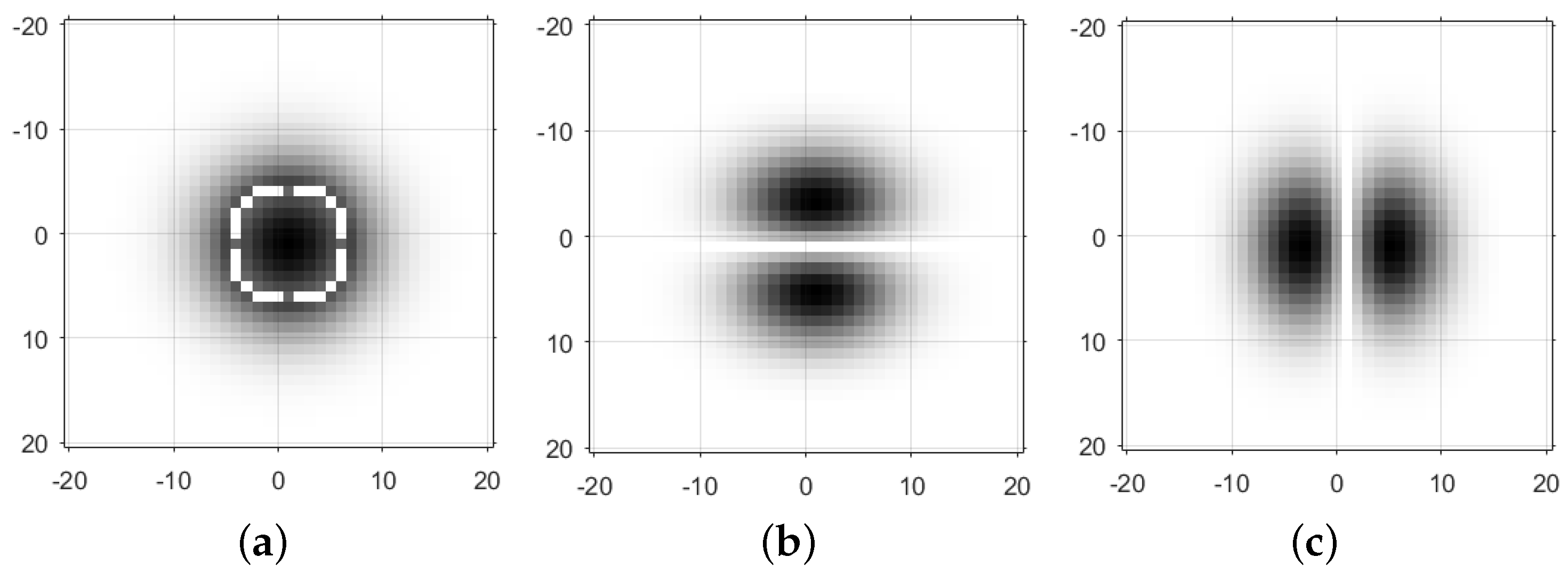
3.2.1. An Improved Phase Congruency Model
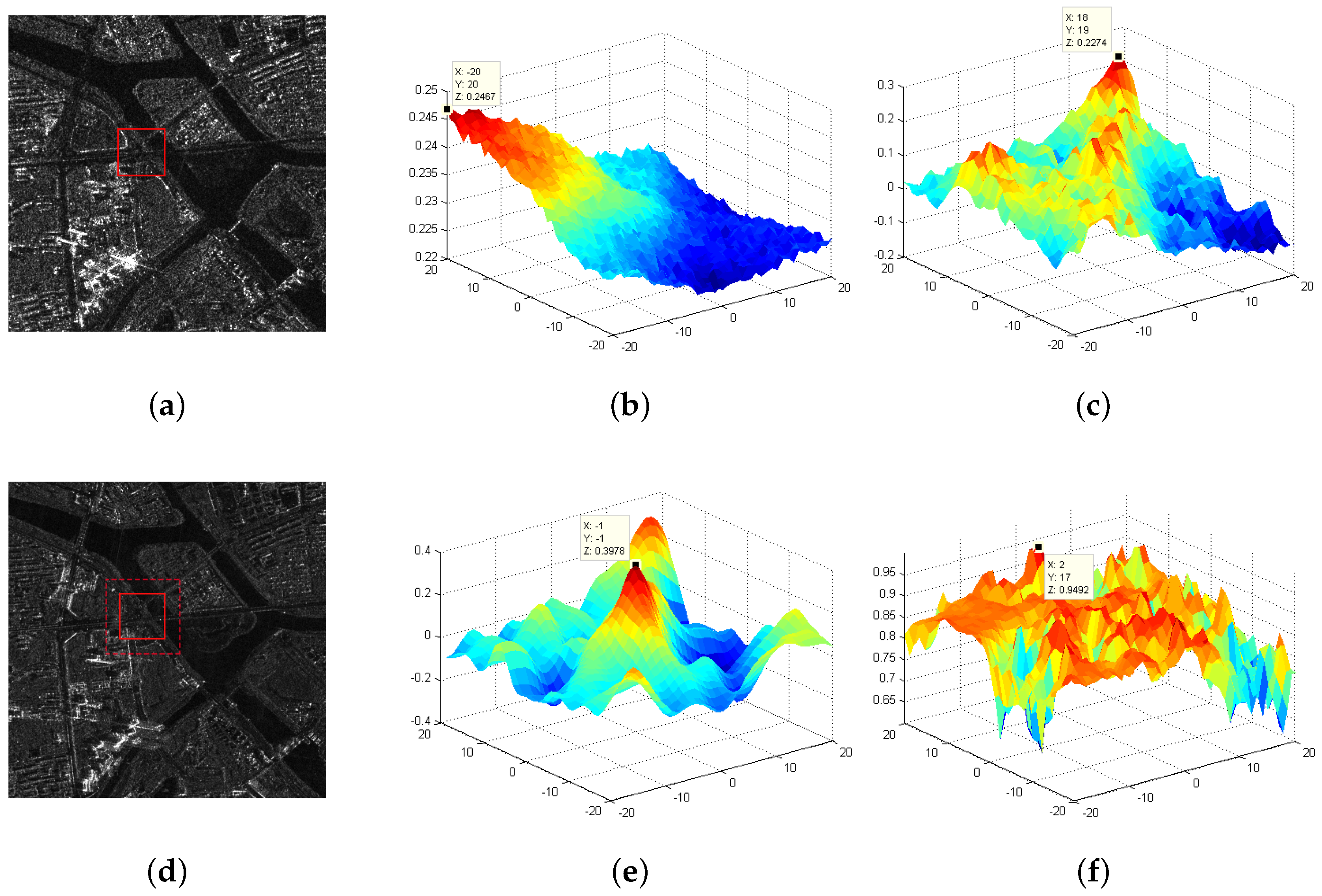
3.2.2. Correspondence Detection by ISPCC and Selection Strategy
4. Experimental Results
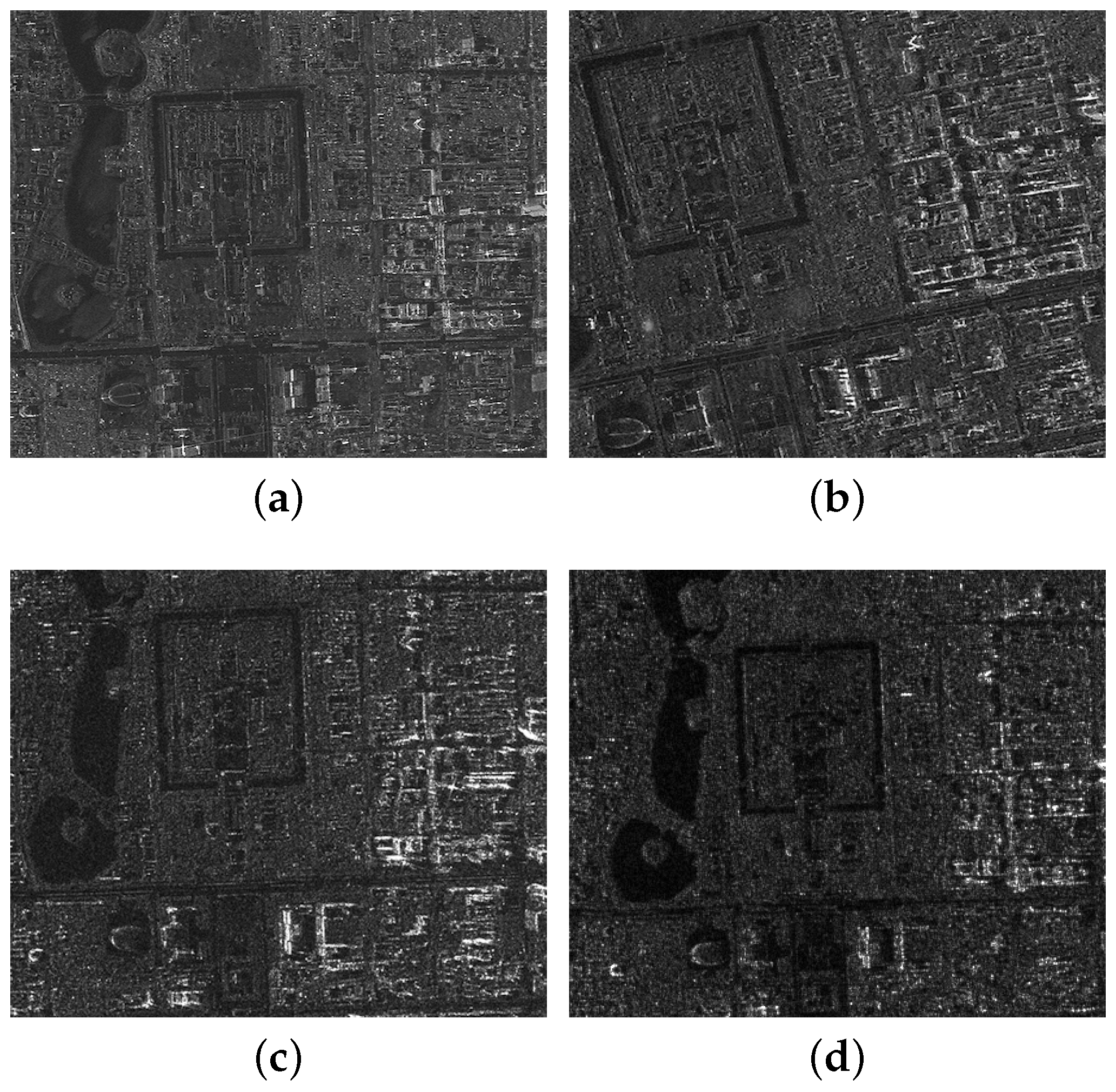
4.1. Datasets
4.2. Parameter Settings
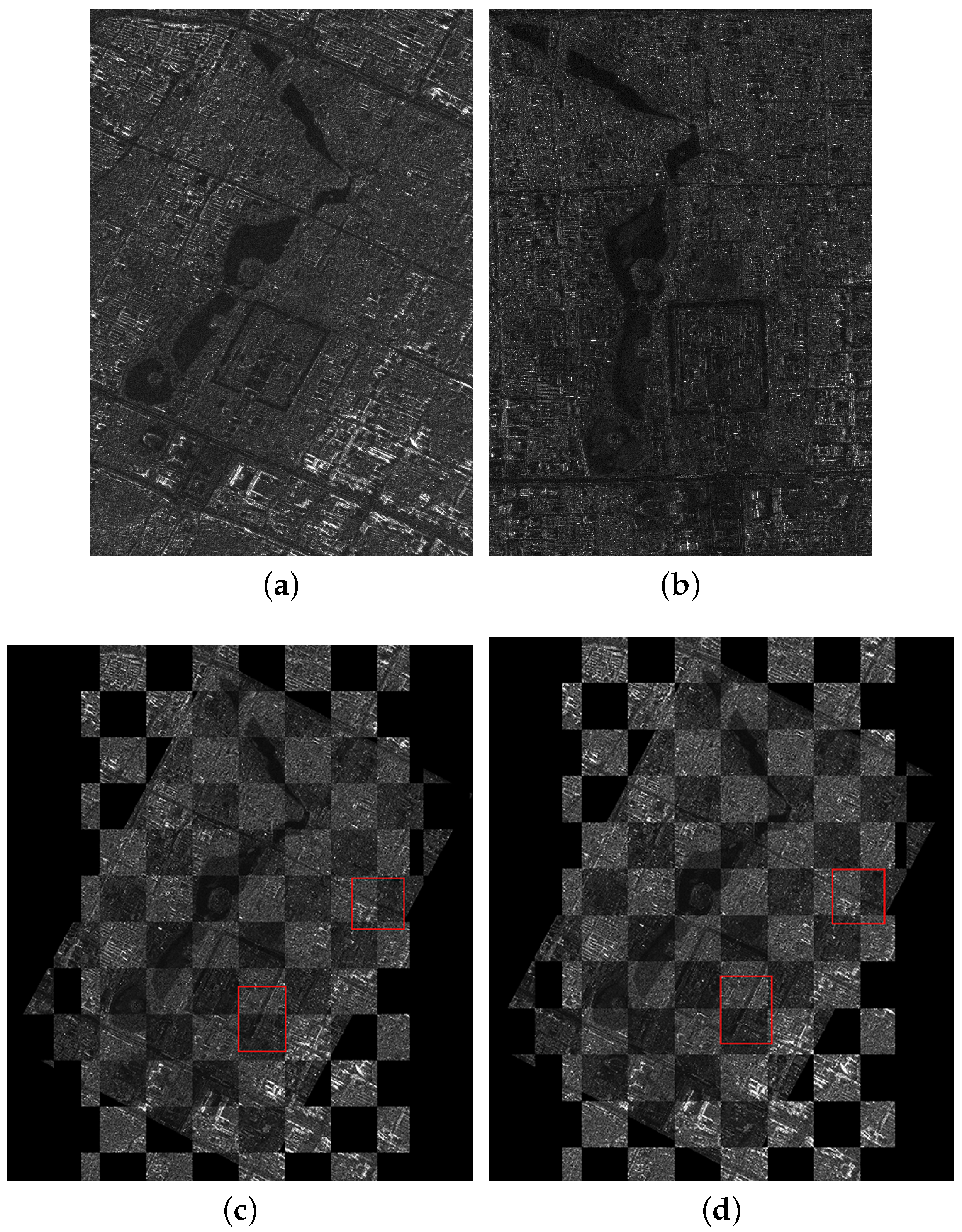
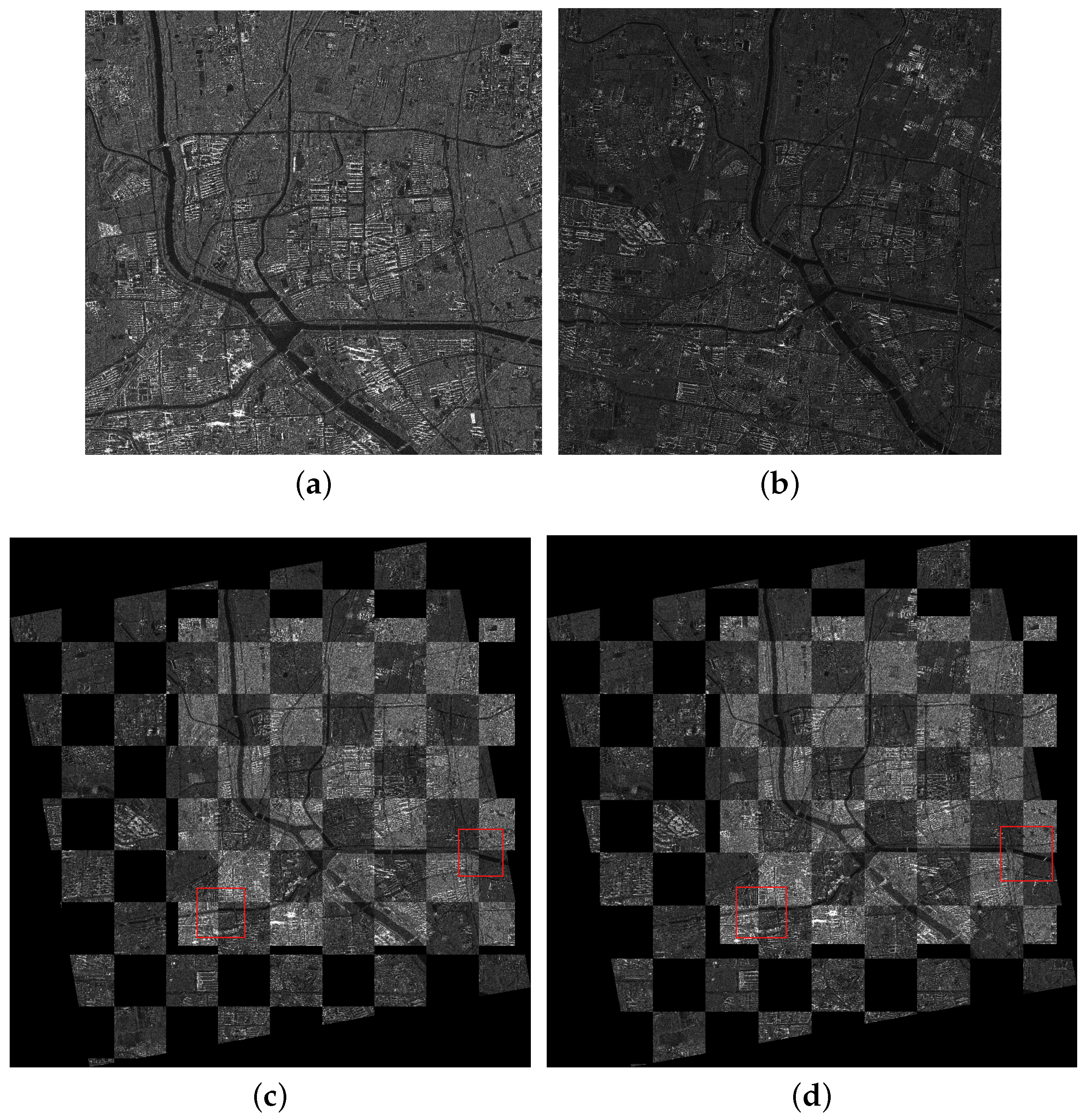
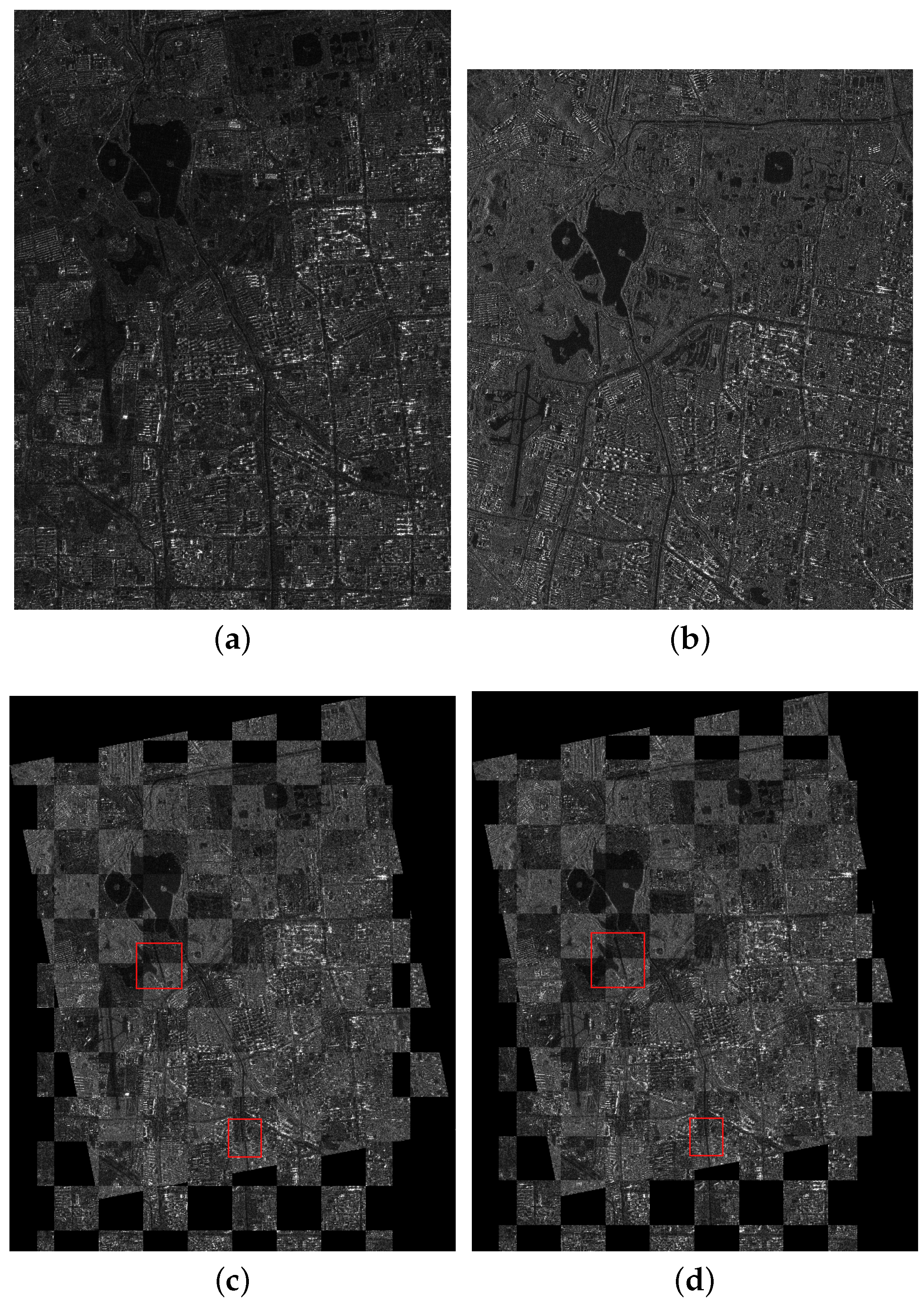
4.3. Registration Results
5. Discussion
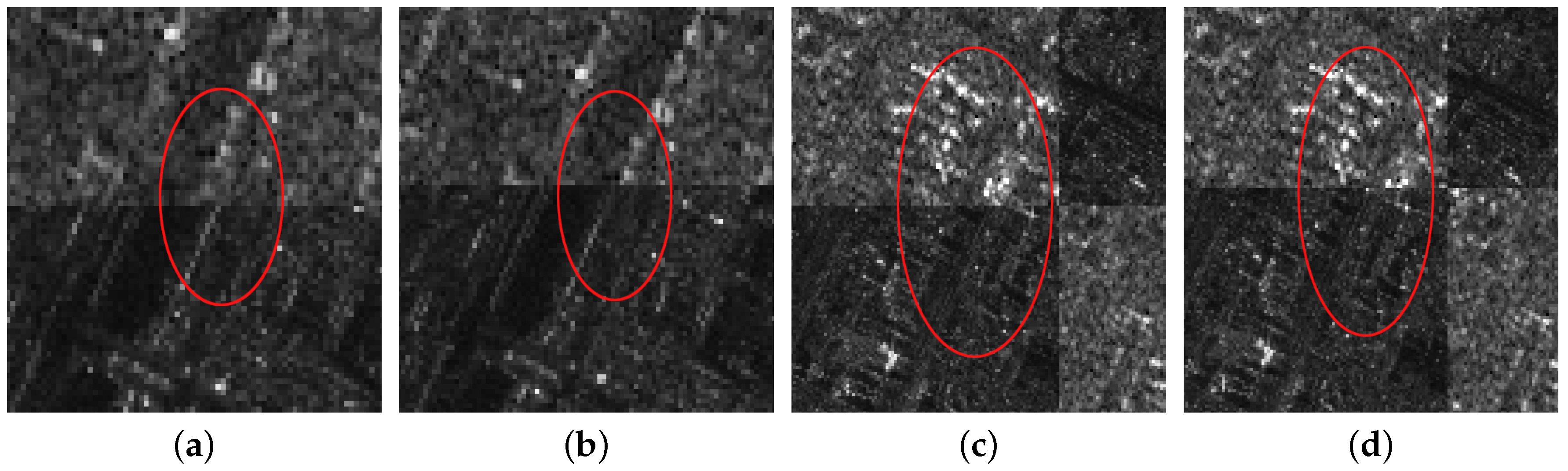
5.1. Discussion on the Registration Performance of Three Image Pairs
5.2. Comparison with Other Registration Methods
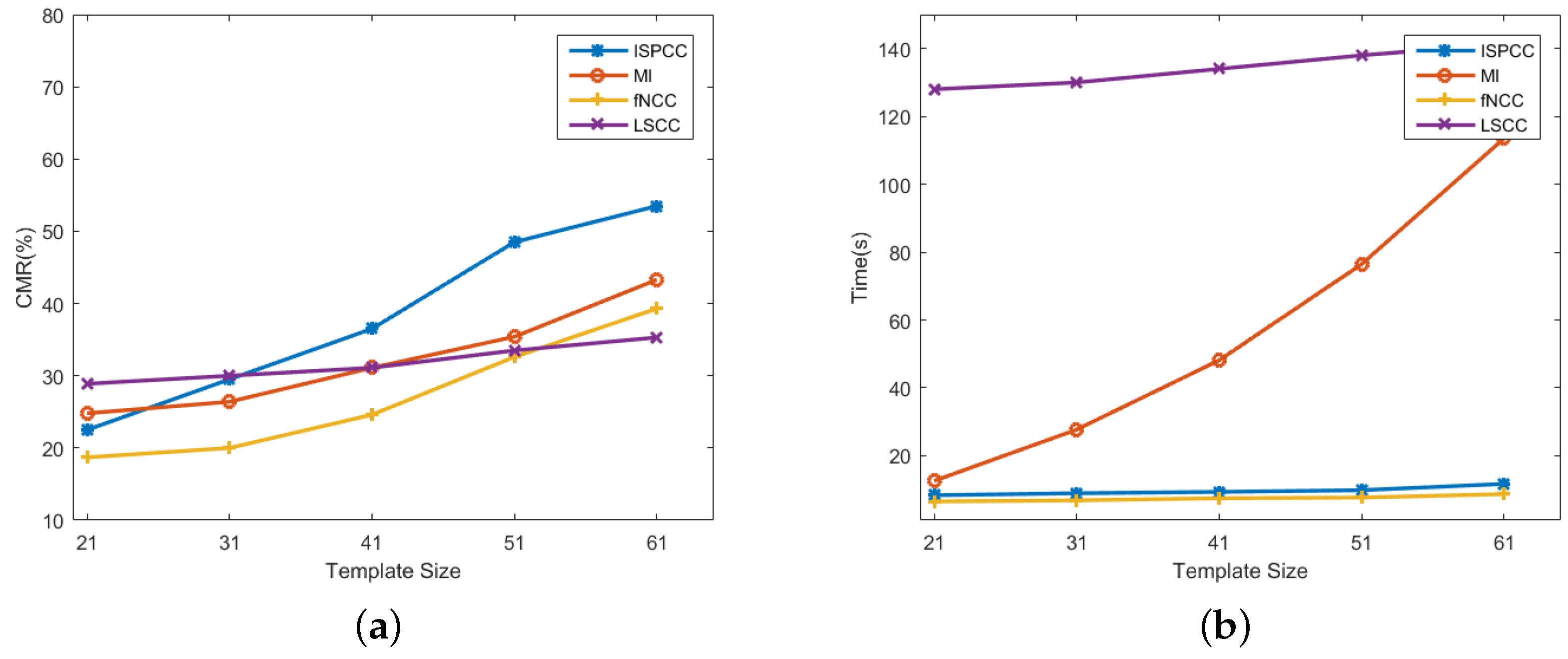
5.3. Comparative Analyses of the ISPCC
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Liu, J.; Qiu, X.; Hong, W. Automated ortho-rectified SAR image of GF-3 satellite using Reverse-Range-Doppler method. In Proceedings of the International IEEE Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; pp. 4445–4448. [Google Scholar]
- Liu, J.; Qiu, X.; Han, B.; Xiao, D. Study on geo-location of sliding spotlight mode of GF-3 satellite. In Proceedings of the 2015 IEEE 5th Asia-Pacific Conference on IEEE Synthetic Aperture Radar (APSAR), Singapore, 1–4 September 2015; pp. 417–420. [Google Scholar]
- Suri, S.; Reinartz, P. Mutual-information-based registration of TerraSAR-X and Ikonos imagery in urban areas. IEEE Trans. Geosci. Remote Sens. 2010, 48, 939–949. [Google Scholar] [CrossRef]
- Fan, J.; Wu, Y.; Wang, F.; Zhang, P.; Li, M. New Point Matching Algorithm Using Sparse Representation of Image Patch Feature for SAR Image Registration. IEEE Trans. Geosci. Remote Sens. 2016, 55, 1498–1510. [Google Scholar] [CrossRef]
- Lowe, D.G. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Huang, L.; Li, Z. Feature-based image registration using the shape context. Int. J. Remote Sens. 2010, 31, 2169–2177. [Google Scholar] [CrossRef]
- Wong, A.; Clausi, D.A. ARRSI: Automatic registration of remote-sensing images. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1483–1493. [Google Scholar] [CrossRef]
- Ye, Y.; Shan, J. A local descriptor based registration method for multispectral remote sensing images with non-linear intensity differences. ISPRS J. Photogramm. Remote Sens. 2014, 90, 83–95. [Google Scholar] [CrossRef]
- Dellinger, F.; Delon, J.; Gousseau, Y.; Michel, J.; Tupin, F. SAR-SIFT: A SIFT-like algorithm for SAR images. IEEE Trans. Geosci. Remote Sens. 2015, 53, 453–466. [Google Scholar] [CrossRef]
- Schwind, P.; Suri, S.; Reinartz, P.; Siebert, A. Applicability of the SIFT operator to geometric SAR image registration. Int. J. Remote Sens. 2010, 31, 1959–1980. [Google Scholar] [CrossRef]
- Fan, B.; Huo, C.; Pan, C.; Kong, Q. Registration of optical and SAR satellite images by exploring the spatial relationship of the improved SIFT. IEEE Geosci. Remote Sens. Lett. 2013, 10, 657–661. [Google Scholar] [CrossRef]
- Wang, S.; You, H.; Fu, K. BFSIFT: A novel method to find feature matches for SAR image registration. IEEE Geosci. Remote Sens. Lett. 2012, 9, 649–653. [Google Scholar] [CrossRef]
- Wang, F.; You, H.; Fu, X. Adapted anisotropic Gaussian SIFT matching strategy for SAR registration. IEEE Geosci. Remote Sens. Lett. 2015, 12, 160–164. [Google Scholar] [CrossRef]
- Fan, J.; Wu, Y.; Wang, F.; Zhang, Q.; Liao, G.; Li, M. SAR image registration using phase congruency and nonlinear diffusion-based SIFT. IEEE Geosci. Remote Sens. Lett. 2015, 12, 562–566. [Google Scholar]
- Wang, B.; Zhang, J.; Lu, L.; Huang, G.; Zhao, Z. A uniform SIFT-like algorithm for SAR image registration. IEEE Geosci. Remote Sens. Lett. 2015, 12, 1426–1430. [Google Scholar] [CrossRef]
- Suri, S.; Schwind, P.; Reinartz, P.; Uhl, J. Combining Mutual Information and Scale Invariant Feature Transform for Fast and Robust Multisensor SAR Image Registration; American Society of Photogrammetry and Remote Sensing: Bethesda, MD, USA, 2009. [Google Scholar]
- Wong, A. An adaptive Monte Carlo approach to phase-based multimodal image registration. IEEE Trans. Inf. Technol. Biomed. 2010, 14, 173–179. [Google Scholar] [CrossRef] [PubMed]
- Liang, J.; Liu, X.; Huang, K.; Li, X.; Wang, D.; Wang, X. Automatic registration of multisensor images using an integrated spatial and mutual information (SMI) metric. IEEE Trans. Geosci. Remote Sens. 2014, 52, 603–615. [Google Scholar] [CrossRef]
- Mellor, M.; Brady, M. Phase mutual information as a similarity measure for registration. Med. Image Anal. 2005, 9, 330–343. [Google Scholar] [CrossRef] [PubMed]
- Lewis, J. Fast normalized cross-correlation. Vis. Interface 1995, 10, 120–123. [Google Scholar]
- Wang, F.; Vemuri, B.C. Non-rigid multi-modal image registration using cross-cumulative residual entropy. Int. J. Comput. Vis. 2007, 74, 201–215. [Google Scholar] [CrossRef] [PubMed]
- Keller, Y.; Averbuch, A. Multisensor image registration via implicit similarity. IEEE Trans. Pattern Anal. Mach. Intell. 2006, 28, 794–801. [Google Scholar] [CrossRef] [PubMed]
- Han, Y.; Byun, Y. Automatic and accurate registration of VHR optical and SAR images using a quadtree structure. Int. J. Remote Sens. 2015, 36, 2277–2295. [Google Scholar] [CrossRef]
- Gong, M.; Zhao, S.; Jiao, L.; Tian, D.; Wang, S. A novel coarse-to-fine scheme for automatic image registration based on SIFT and mutual information. IEEE Trans. Geosci. Remote Sens. 2014, 52, 4328–4338. [Google Scholar] [CrossRef]
- Tong, X.; Zhao, W.; Xing, J.; Fu, W. Status and development of China High-Resolution Earth Observation System and application. In Proceedings of the 2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; pp. 3738–3741. [Google Scholar]
- Fjortoft, R.; Lopes, A.; Marthon, P.; Cubero-Castan, E. An optimal multiedge detector for SAR image segmentation. IEEE Trans. Geosci. Remote Sens. 1998, 36, 793–802. [Google Scholar] [CrossRef]
- Fischler, M.A.; Bolles, R.C. Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography. Commun. ACM 1981, 24, 381–395. [Google Scholar] [CrossRef]
- Salentinig, A.; Gamba, P. Combining SAR-based and multispectral-based extractions to map urban areas at multiple spatial resolutions. IEEE Geosci. Remote Sens. Mag. 2015, 3, 100–112. [Google Scholar] [CrossRef]
- Ye, Y.; Shan, J.; Bruzzone, L.; Shen, L. Robust registration of multimodal remote sensing images based on structural similarity. IEEE Trans. Geosci. Remote Sens. 2017, 55, 2941–2958. [Google Scholar] [CrossRef]
- Kovesi, P. Image features from phase congruency. Videre J. Comput. Vis. Res. 1999, 1, 1–26. [Google Scholar]
- Venkatesh, S.; Owens, R. An energy feature detection scheme. In Proceedings of the ICIP’89: IEEE International Conference on Image Processing: Conference Proceedings, Singapore, 5–8 September 1989. [Google Scholar]
- Zhang, Z.; Wang, X.; Xu, L. Target detection in sar images based on sub-aperture coherence and phase congruency. Intell. Autom. Soft Comput. 2012, 18, 831–843. [Google Scholar] [CrossRef]
- Xiao, P.F.; Feng, X.Z.; Zhao, S.H.; She, J.F. Segmentation of High-resolution Remotely Sensed Imagery Based on Phase Congruency. Acta Geod. Cartogr. Sin. 2007, 2, 146–151. [Google Scholar]
- Xiang, Y.; Wang, F.; Wan, L.; You, H. SAR-PC: Edge Detection in SAR Images via an Advanced Phase Congruency Model. Remote Sens. 2017, 9, 209. [Google Scholar] [CrossRef]
- Shui, P.L.; Cheng, D. Edge detector of SAR images using Gaussian-Gamma-shaped bi-windows. IEEE Geosci. Remote Sens. Lett. 2012, 9, 846–850. [Google Scholar] [CrossRef]
- Felsberg, M.; Sommer, G. The monogenic signal. IEEE Trans. Signal Process. 2001, 49, 3136–3144. [Google Scholar] [CrossRef]
- Wu, Y.; Ma, W.; Gong, M.; Su, L.; Jiao, L. A novel point-matching algorithm based on fast sample consensus for image registration. IEEE Geosci. Remote Sens. Lett. 2015, 12, 43–47. [Google Scholar] [CrossRef]
- Touzi, R.; Lopes, A.; Bousquet, P. A statistical and geometrical edge detector for SAR images. IEEE Trans. Geosci. Remote Sens. 1988, 26, 764–773. [Google Scholar] [CrossRef]
- Arévalo, V.; González, J. An experimental evaluation of non-rigid registration techniques on Quickbird satellite imagery. Int. J. Remote Sens. 2008, 29, 513–527. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pair | Mode | Resolution | Date | Direction | Size |
|---|---|---|---|---|---|
| a | FSMI | 5 m | 16 August 2016 | DEC | 810 × 1324 |
| a | SL | 1 m | 9 December 2016 | ASC | 3518 × 5387 |
| b | FSMI | 5 m | 16 August 2016 | DEC | 1597 × 1554 |
| b | UFSM | 3 m | 20 September 2016 | DEC | 3579 × 3611 |
| c | QPSMI | 8 m | 9 December 2016 | DEC | 958 × 1315 |
| c | FSMI | 5 m | 27 September 2016 | ASC | 1566 × 1896 |
| Image Pair | SAR-SIFT | BFSIFT | SIFT | Coarse | Fine | |
|---|---|---|---|---|---|---|
| RMSE (pixel) | a | 2.21 | 4.48 | 5.88 | 3.64 | 0.605 |
| Time (s) | a | 900.2 | 654.1 | 709.2 | 18.71 | 9.32 |
| RMSE (pixel) | b | 1.89 | 3.56 | 4.5 | 4.64 | 0.465 |
| Time (s) | b | 3420.9 | 968.8 | 961.7 | 26.49 | 9.85 |
| RMSE (pixel) | c | 2.46 | 2.92 | 0.623 | ||
| Time (s) | c | 493.7 | 163.8 | 167.6 | 7.98 | 2.84 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiang, Y.; Wang, F.; You, H. An Automatic and Novel SAR Image Registration Algorithm: A Case Study of the Chinese GF-3 Satellite. Sensors 2018, 18, 672. https://doi.org/10.3390/s18020672
Xiang Y, Wang F, You H. An Automatic and Novel SAR Image Registration Algorithm: A Case Study of the Chinese GF-3 Satellite. Sensors. 2018; 18(2):672. https://doi.org/10.3390/s18020672
Chicago/Turabian StyleXiang, Yuming, Feng Wang, and Hongjian You. 2018. "An Automatic and Novel SAR Image Registration Algorithm: A Case Study of the Chinese GF-3 Satellite" Sensors 18, no. 2: 672. https://doi.org/10.3390/s18020672
APA StyleXiang, Y., Wang, F., & You, H. (2018). An Automatic and Novel SAR Image Registration Algorithm: A Case Study of the Chinese GF-3 Satellite. Sensors, 18(2), 672. https://doi.org/10.3390/s18020672