Active Prior Tactile Knowledge Transfer for Learning Tactual Properties of New Objects



Abstract
:1. Introduction
1.1. Motivation
1.2. Background
1.3. Contribution
- We enable a robot to apply exploratory actions with multiple action parameters. In this way, the robot gains more detailed tactile information.
- We propose an active tactile transfer learning algorithm so that the robot leverages the previously obtained detailed tactile knowledge (prior tactile exploratory action experiences) while learning about a new set of objects.
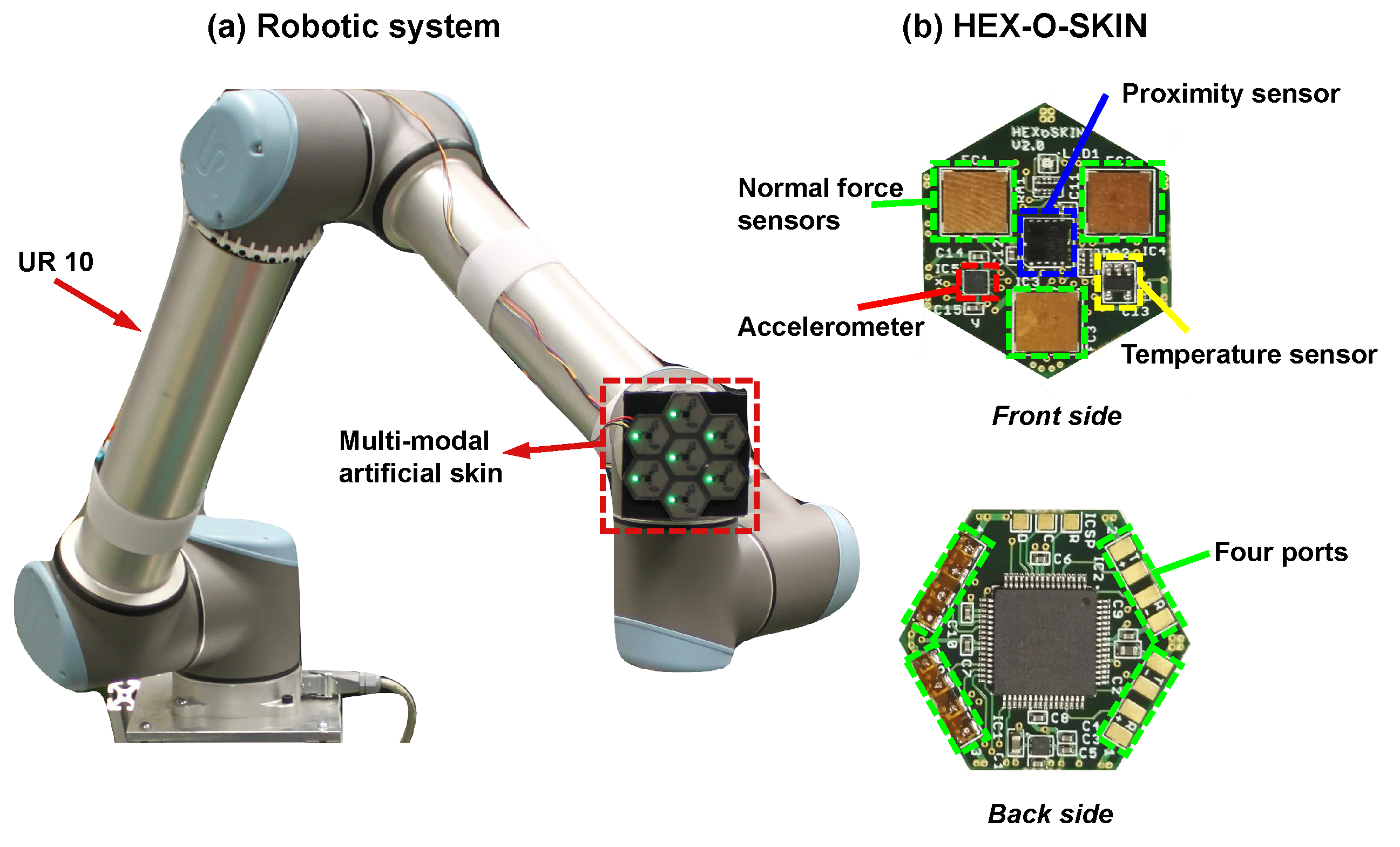
2. System Description
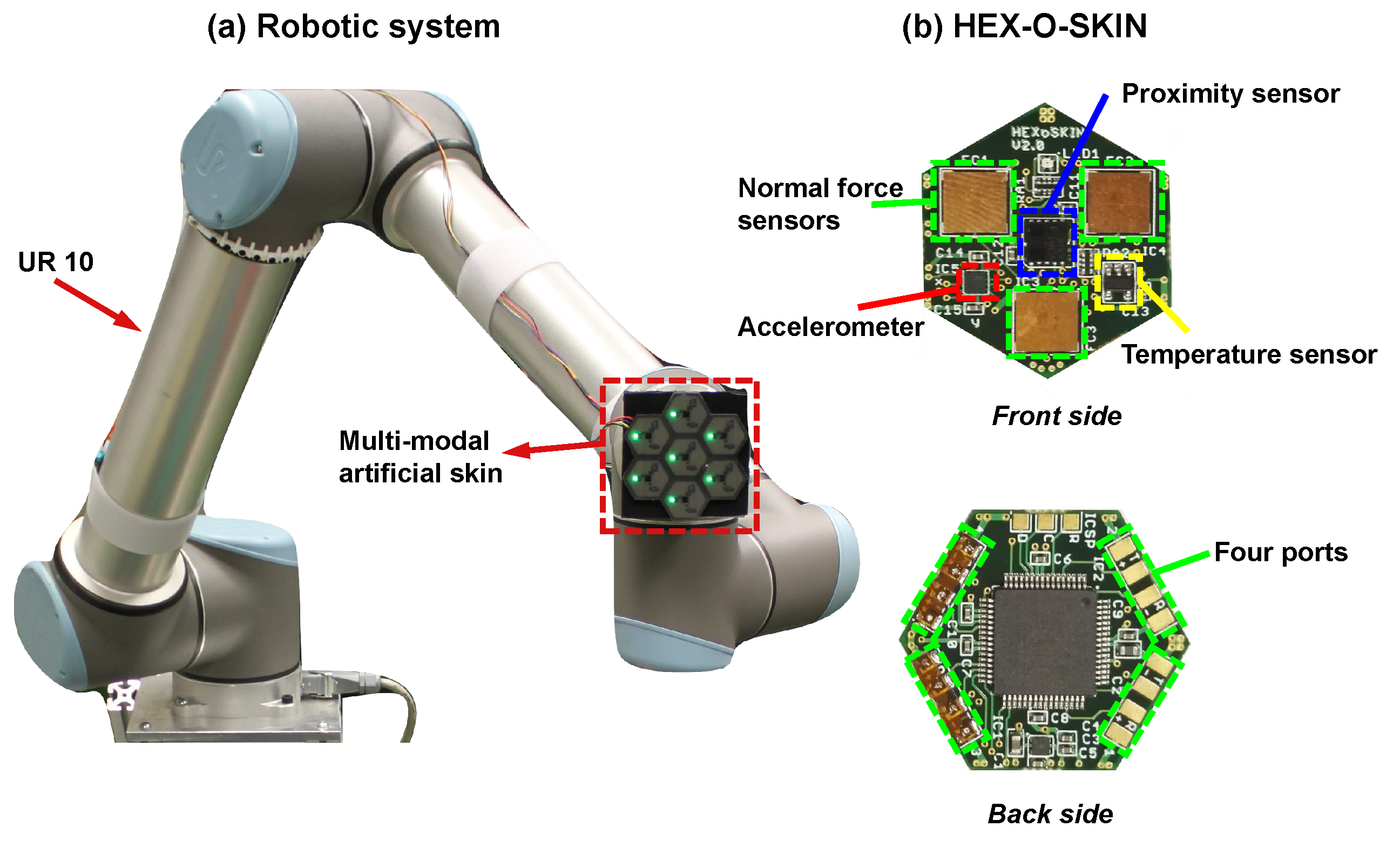
2.1. Multi-modal Artificial Skin
2.2. UR10 Robotic Arm
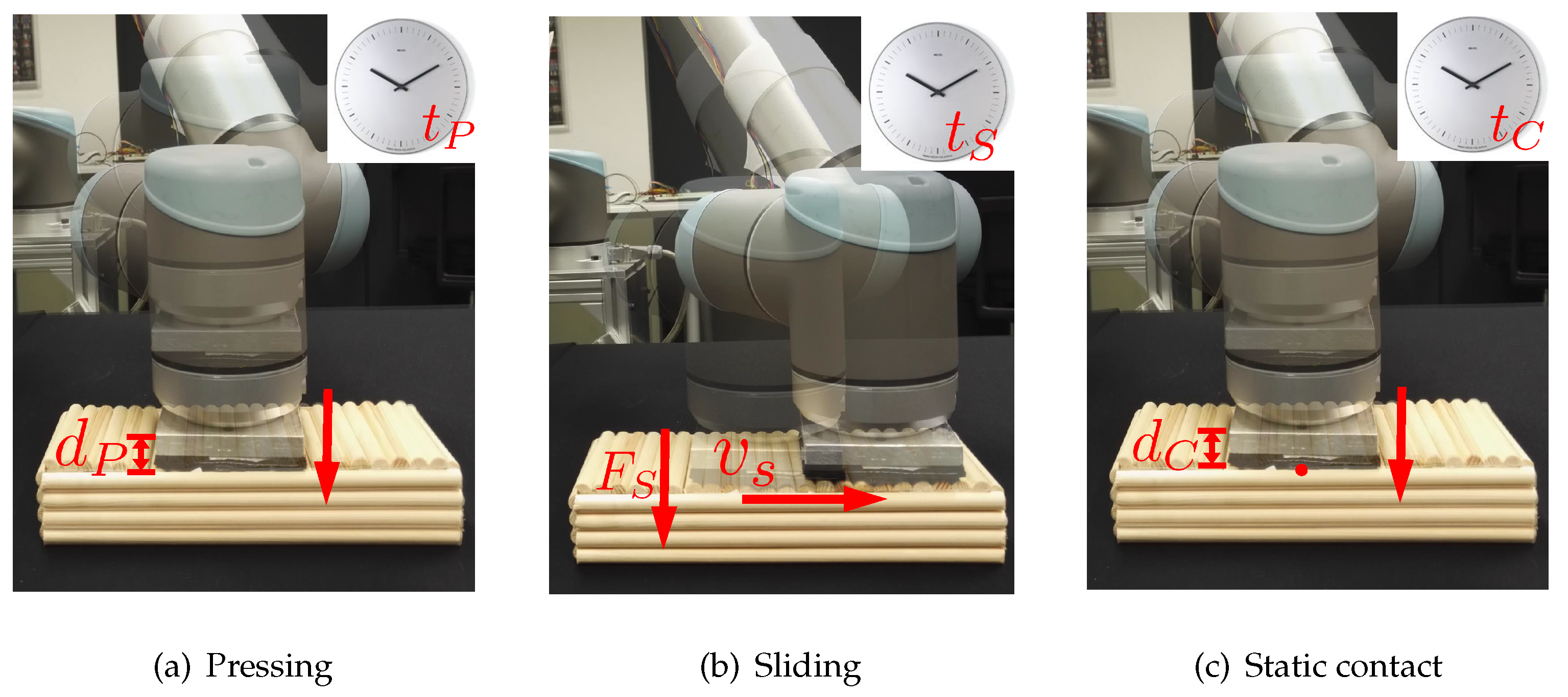
3. Exploratory Actions and Perception
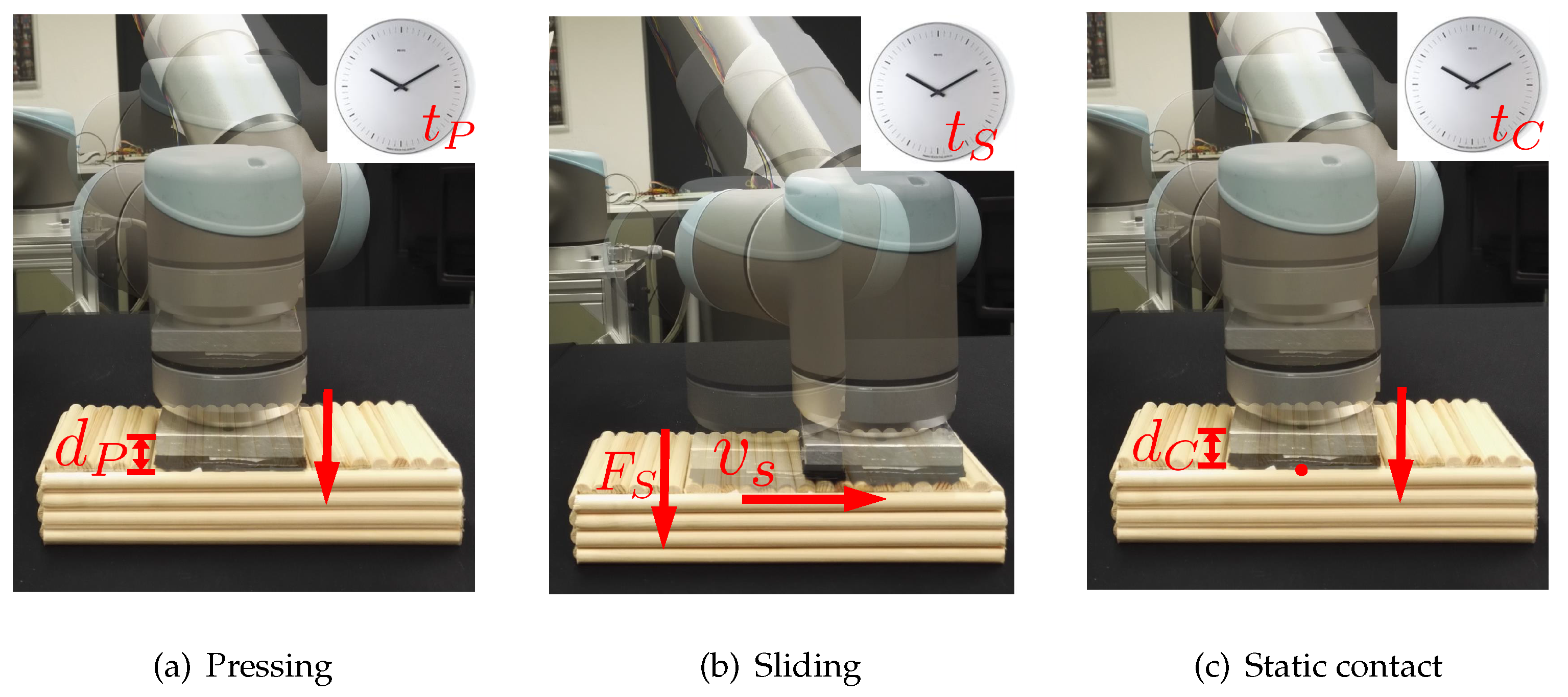
3.1. Exploratory Actions Definition
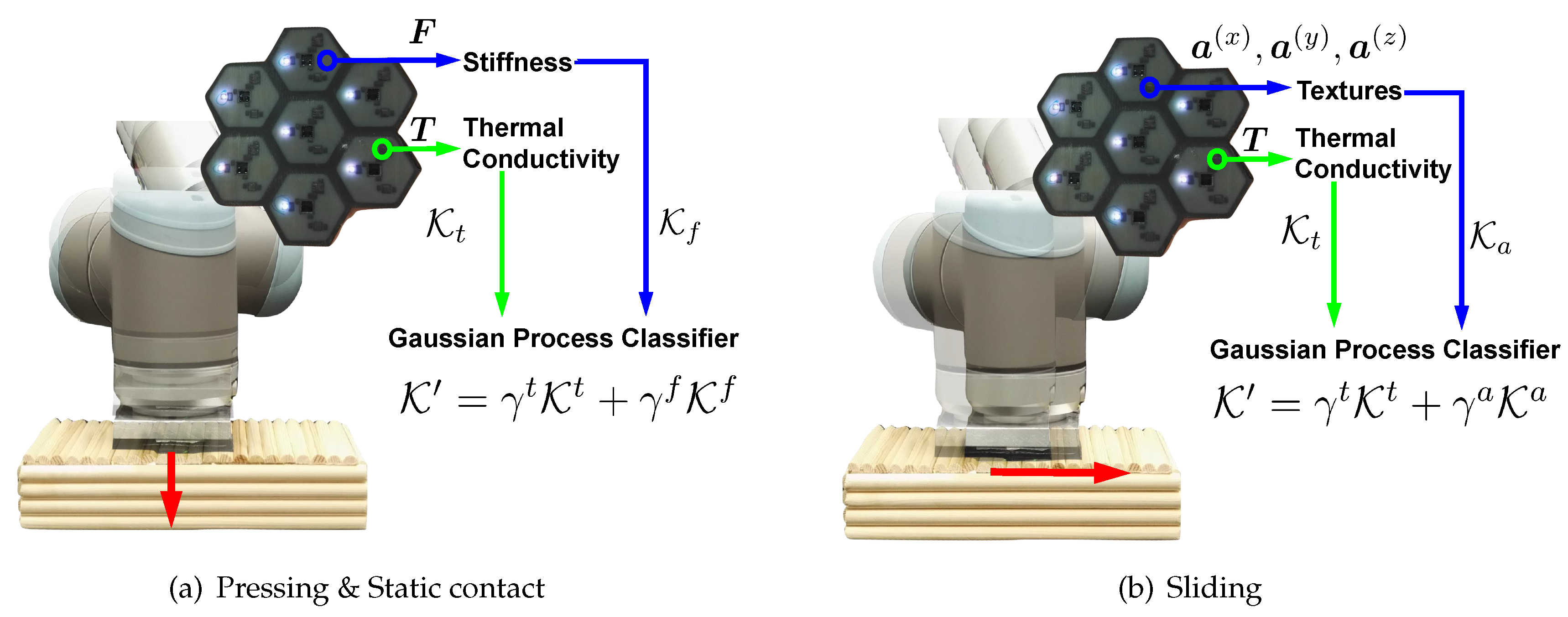
3.1.1. Pressing
3.1.2. Sliding
3.1.3. Static Contact
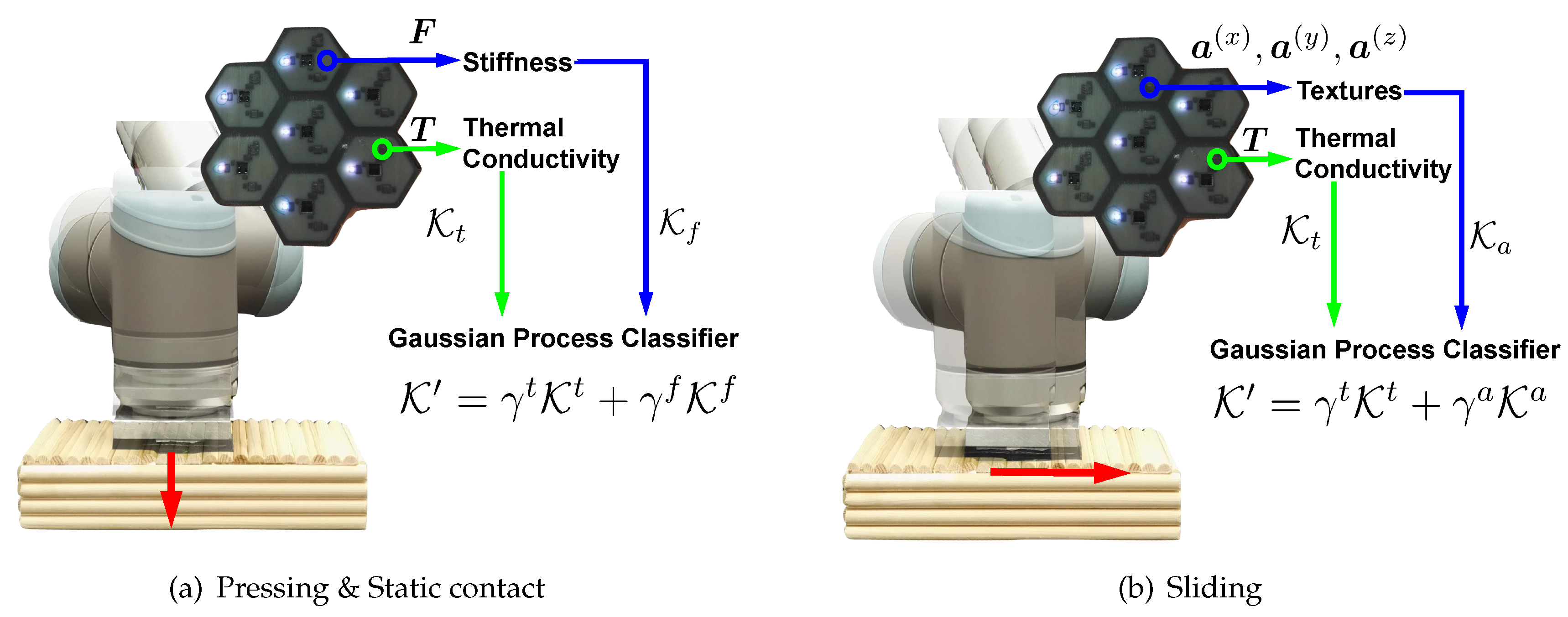
3.2. Object Physical Properties Perception
3.2.1. Stiffness
3.2.2. Textural Property
3.2.3. Thermal Conductivity
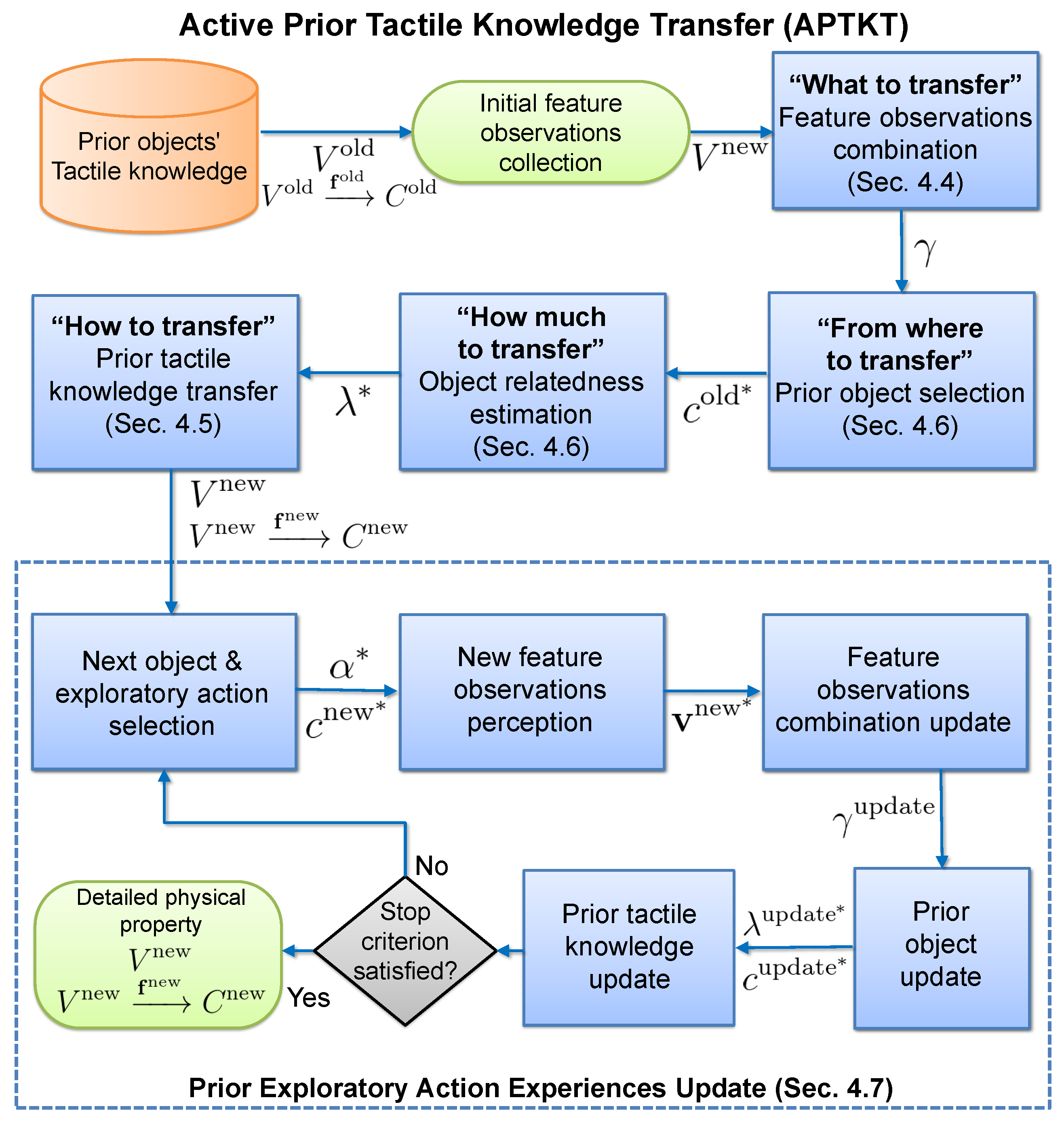
4. Transferring Prior Tactile Exploratory Action Experiences
4.1. Problem Formulation
4.2. Gaussian Process Classification
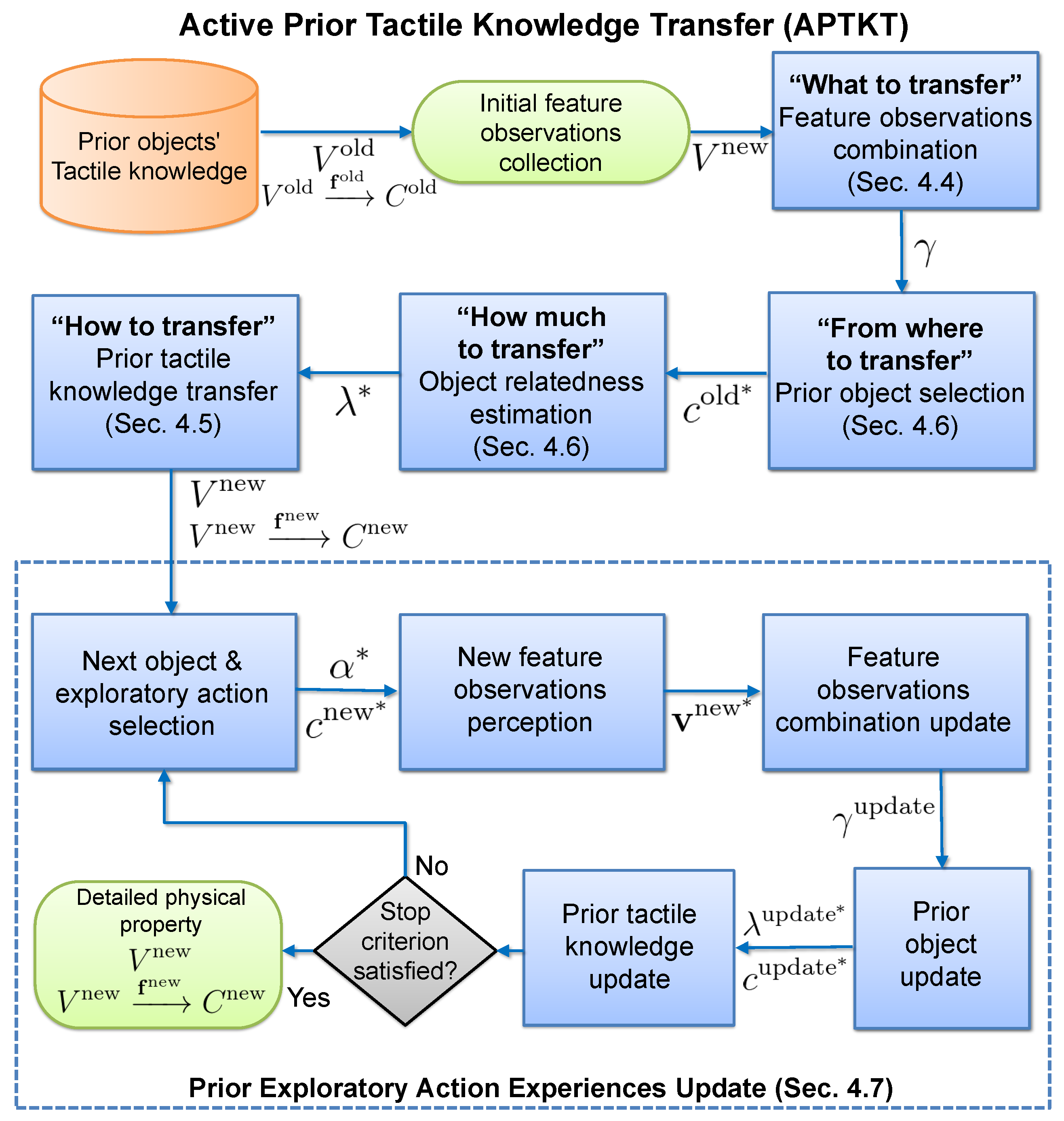
4.3. Process
4.4. What to Transfer
| Algorithm 1 Multiple Feature Observations Combination |
 |
4.5. How to Transfer
4.6. From Where and How Much to Transfer
4.7. Prior Exploratory Action Experiences Update
| Algorithm 2 Active Touch for Learning Physical Properties |
 |
5. Experimental Results
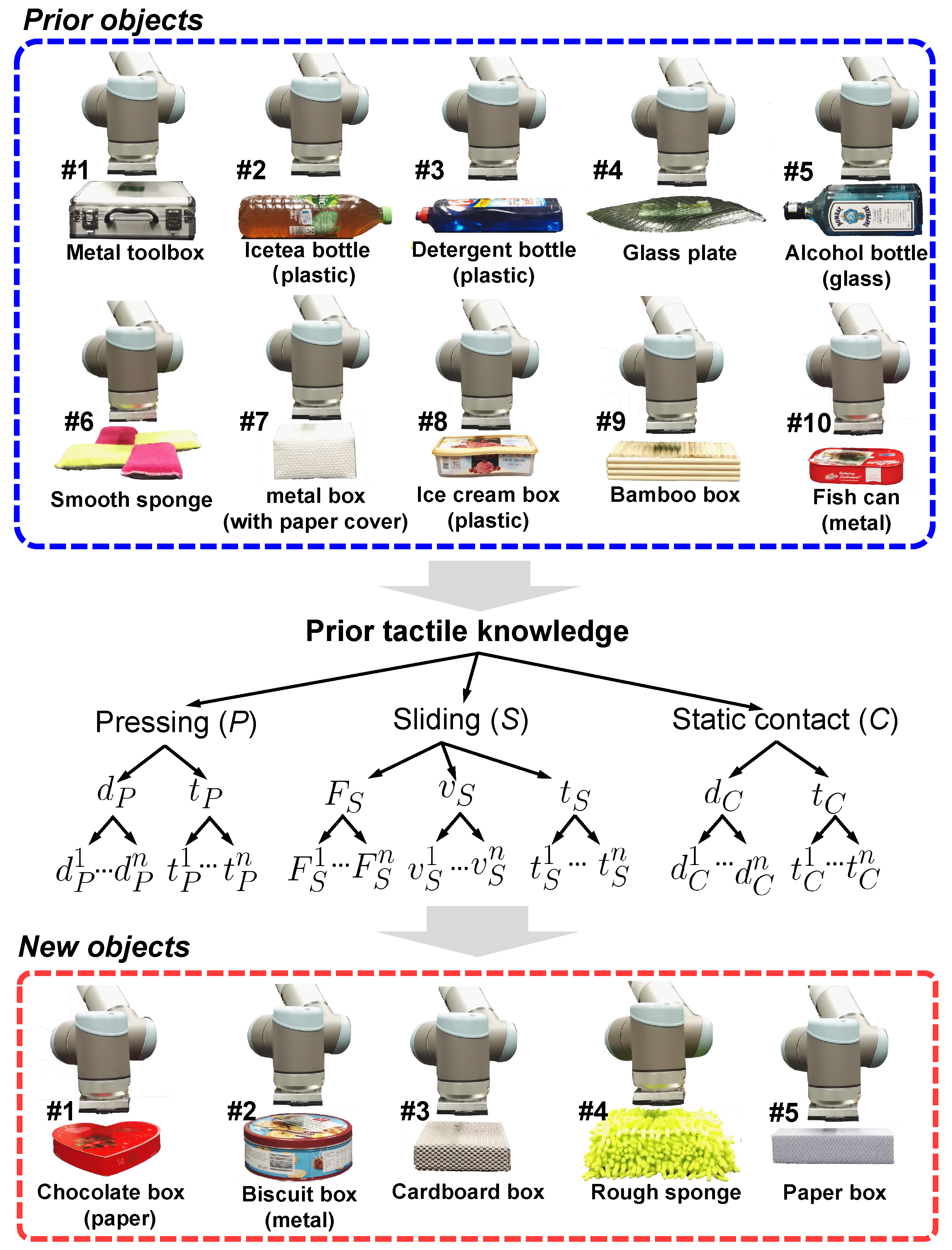
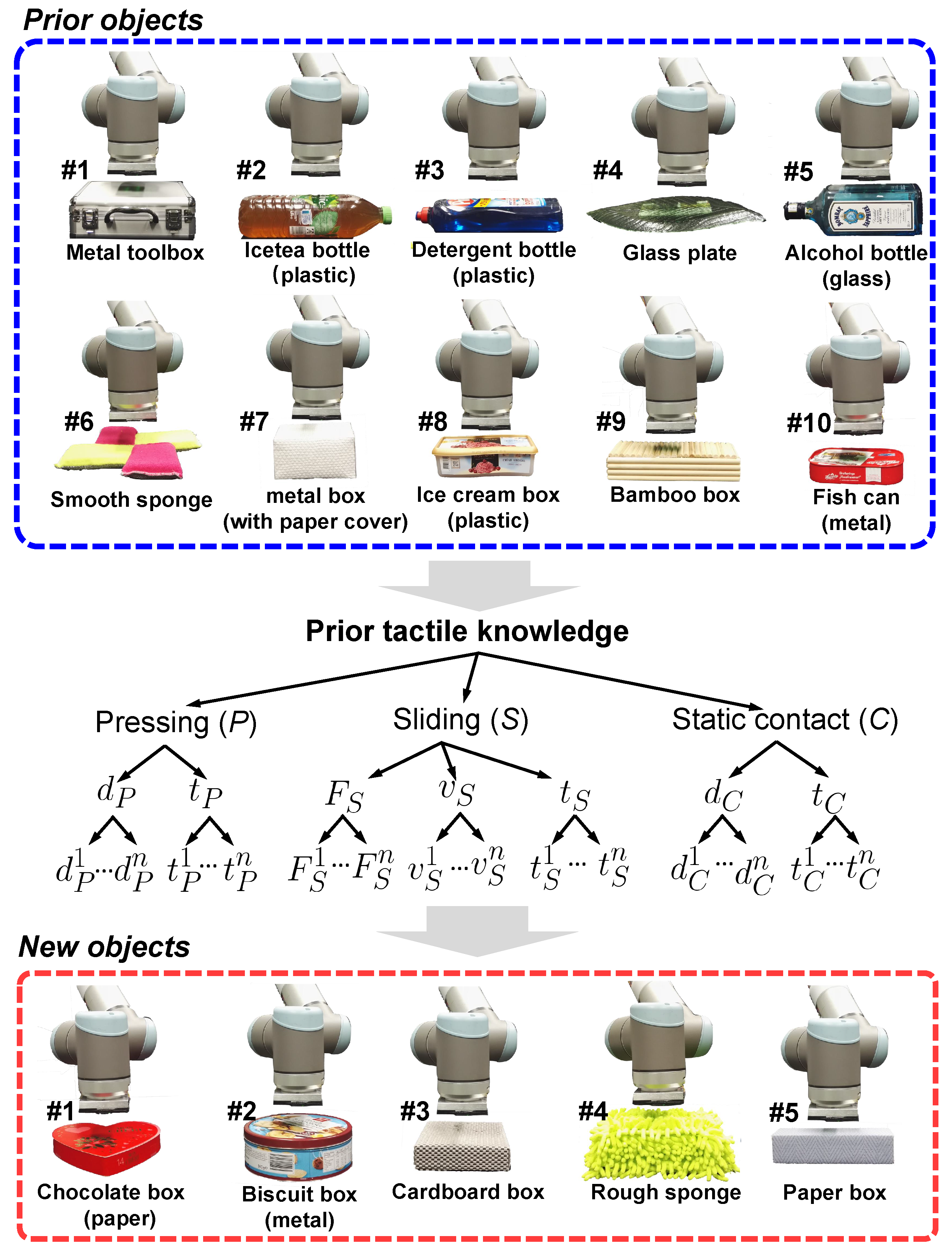
5.1. Experimental Objects
5.2. Exploratory Action Determination and Test Data Collection
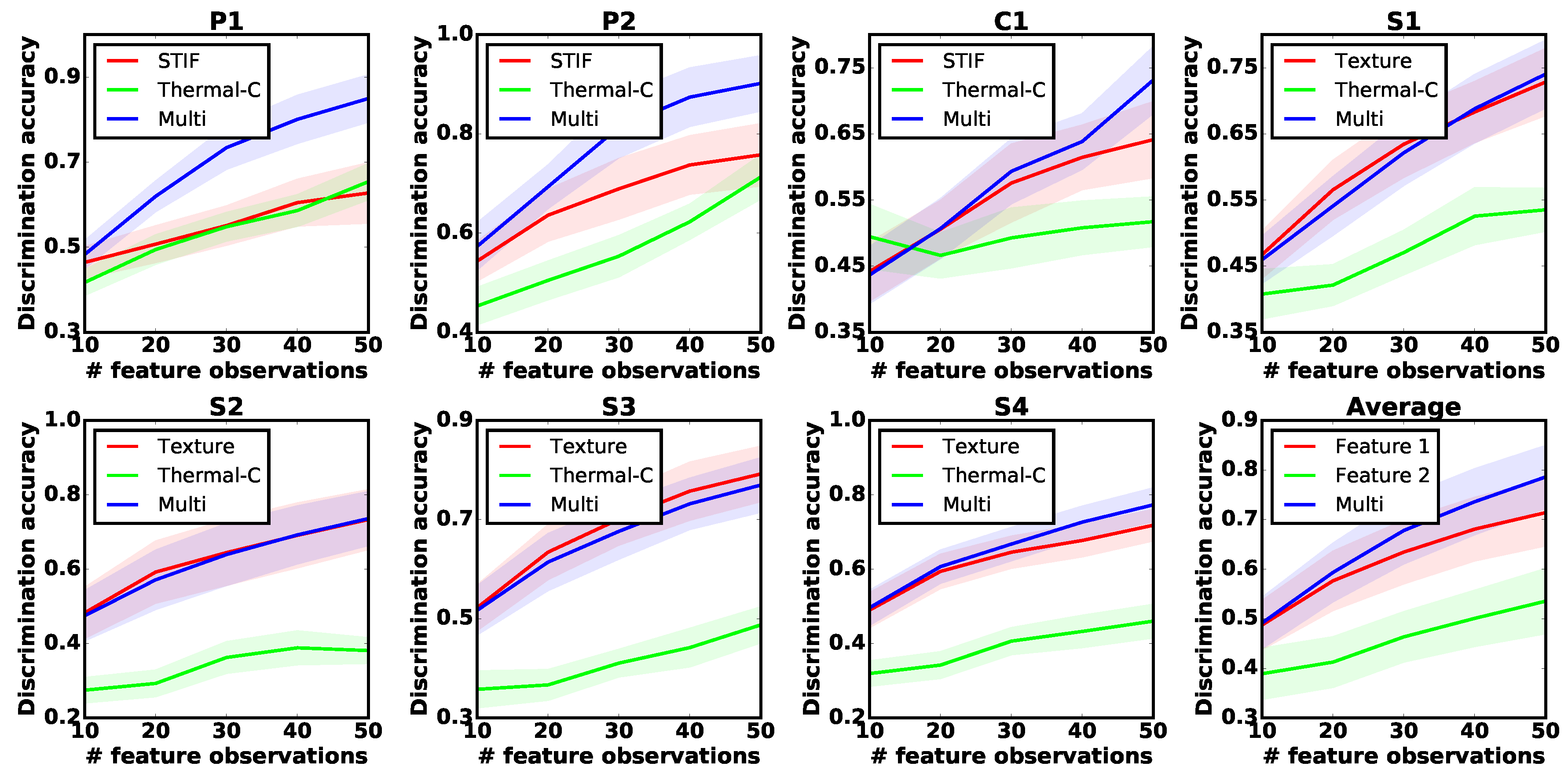
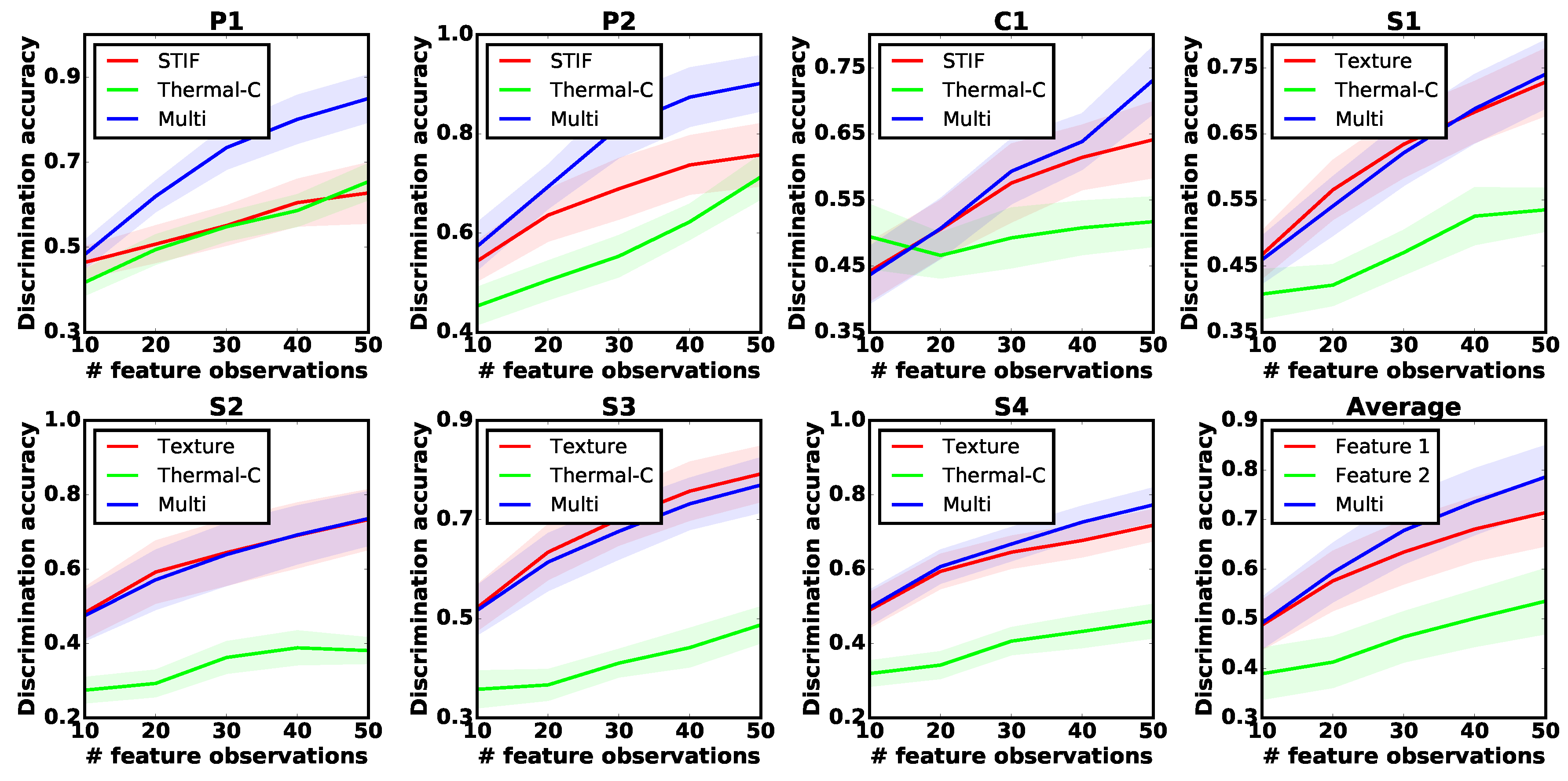
5.3. Evaluation of Multiple Feature Observations Combination Method
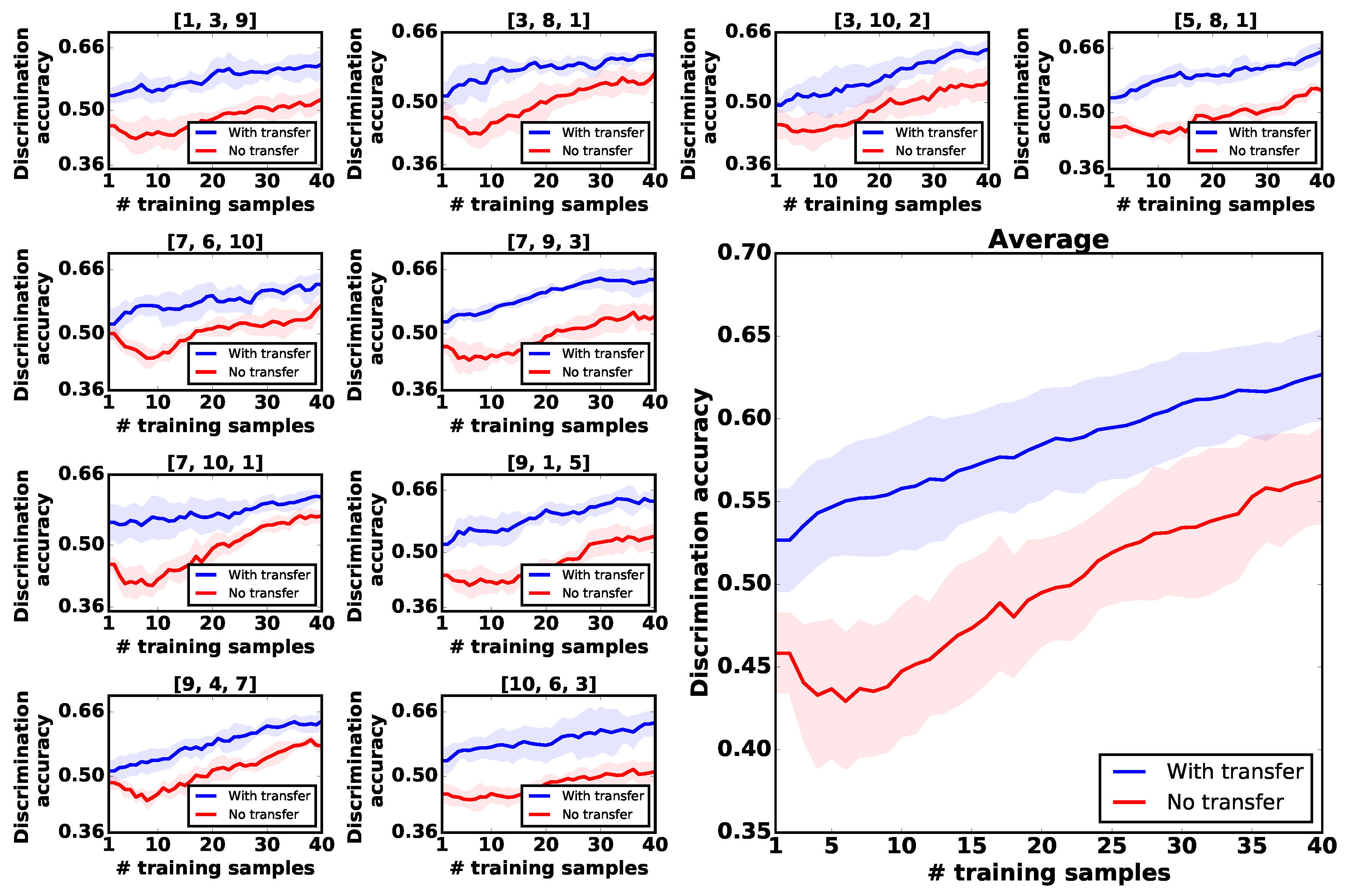
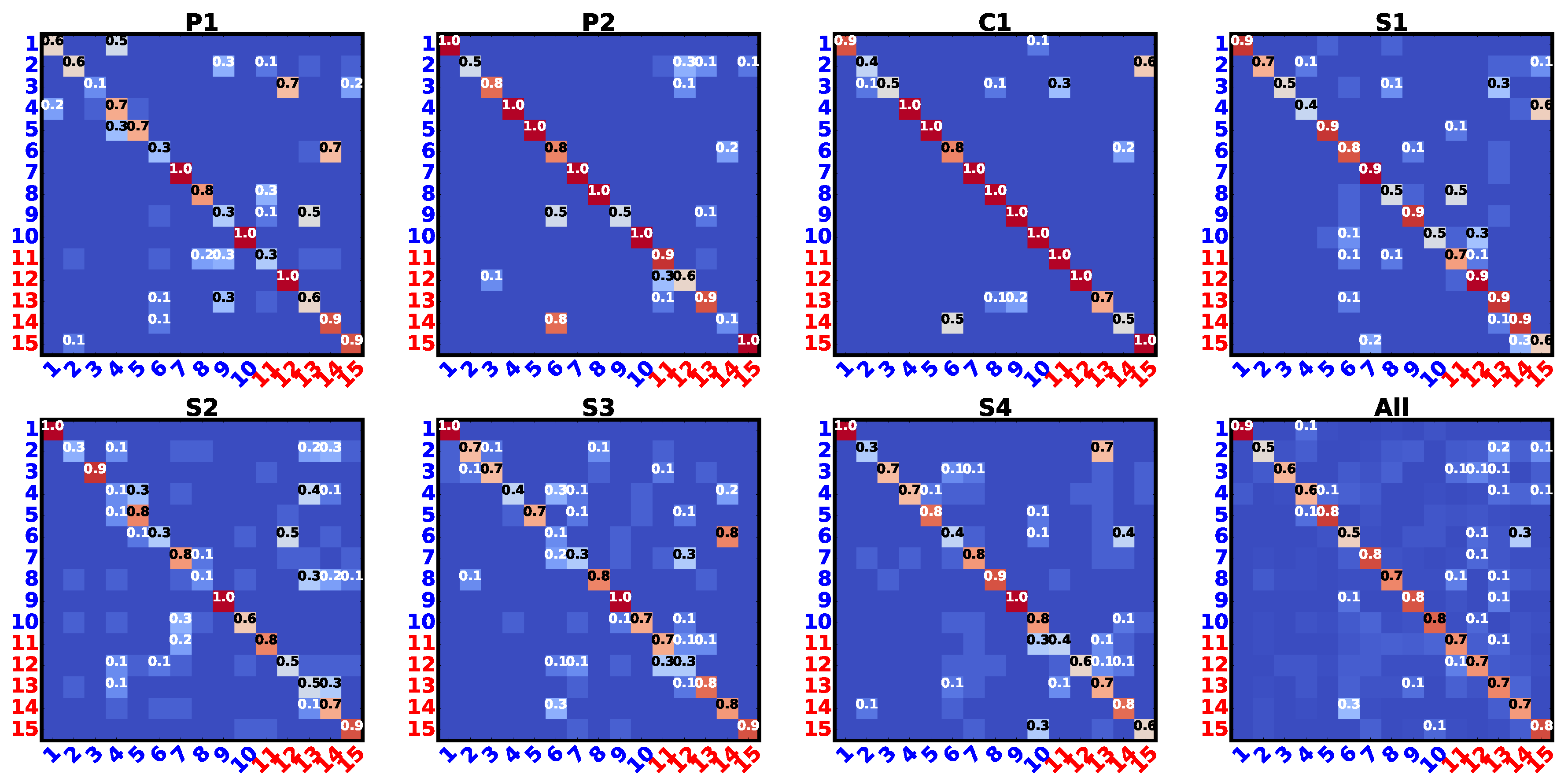
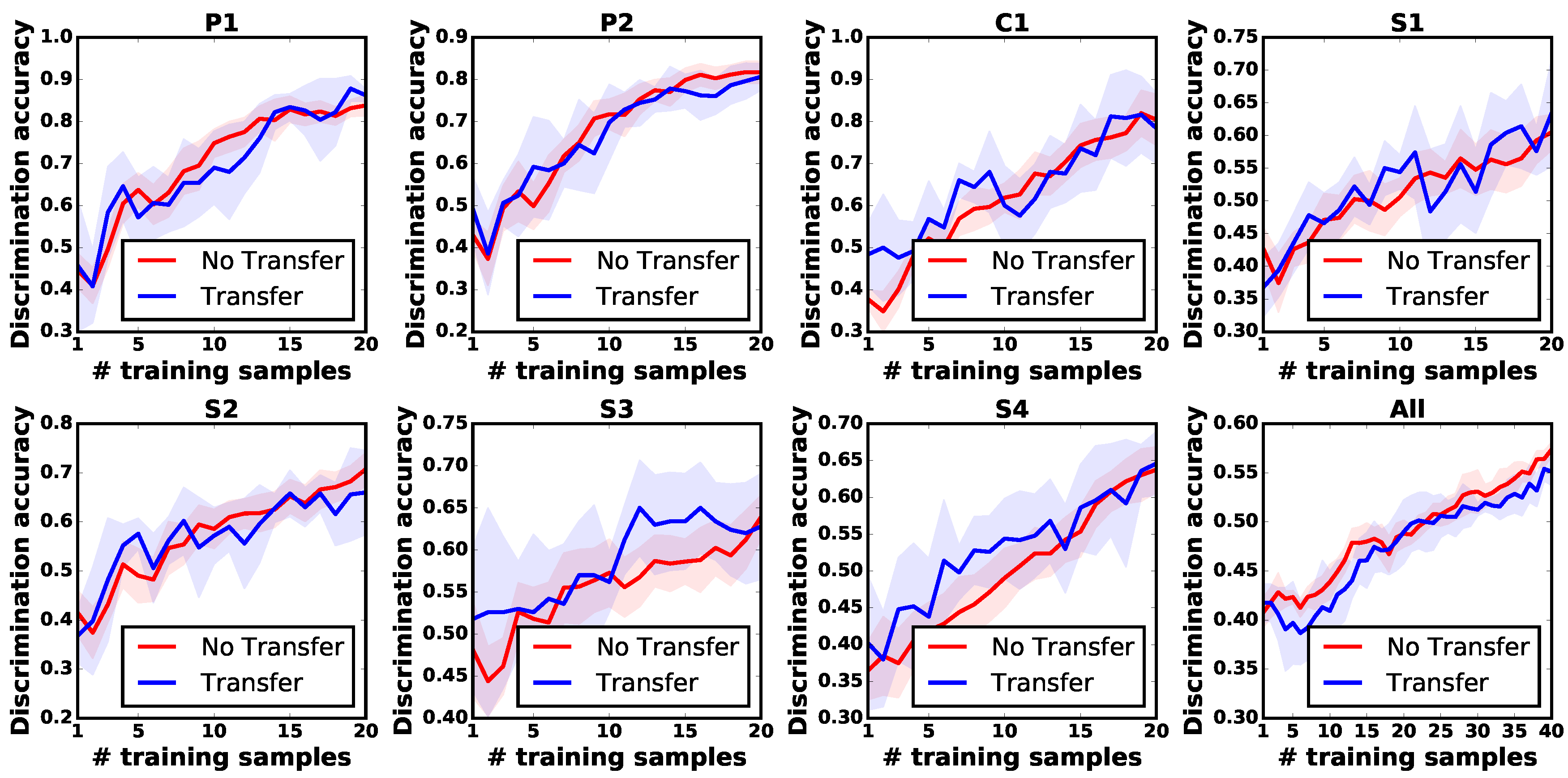
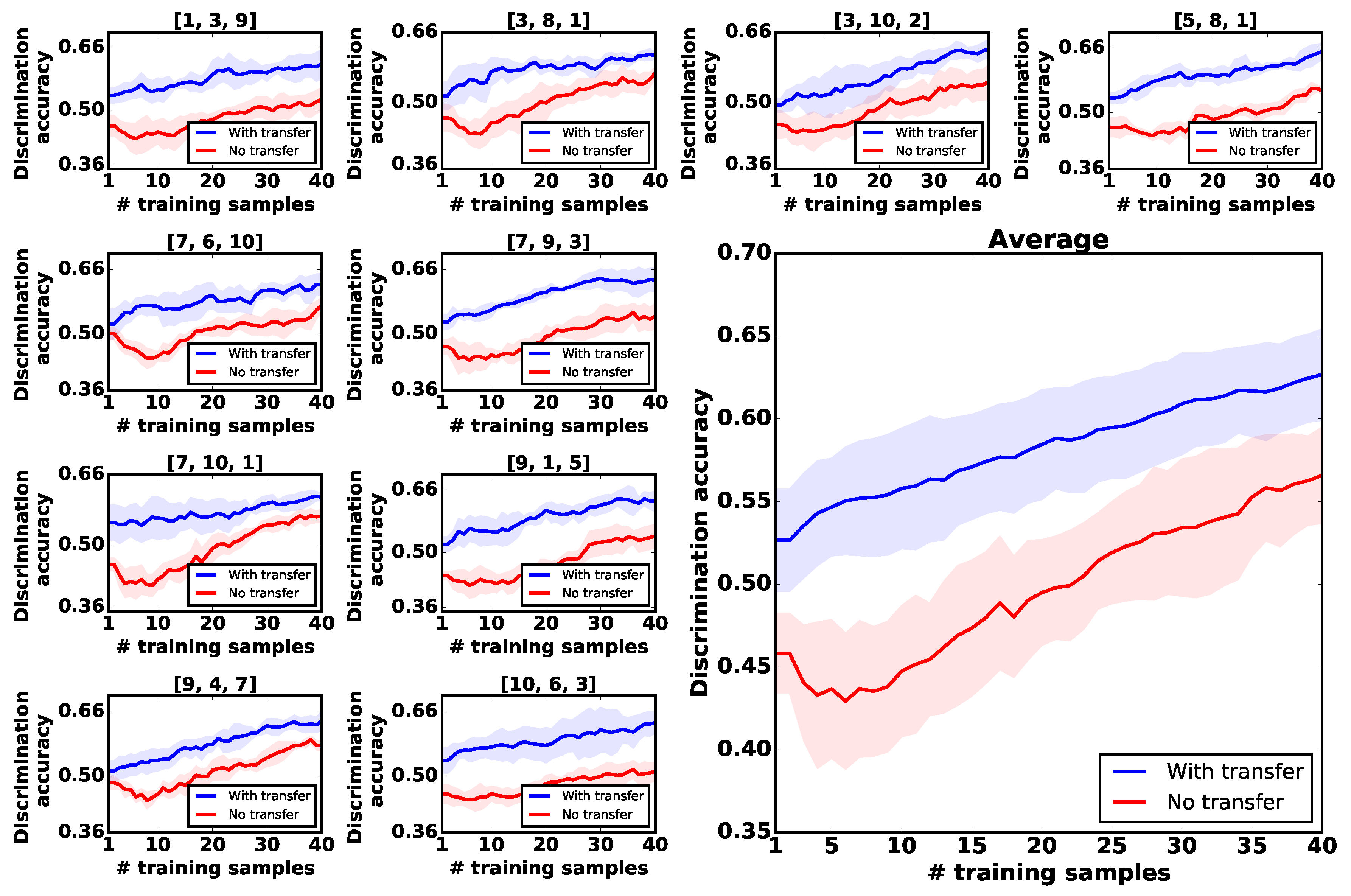
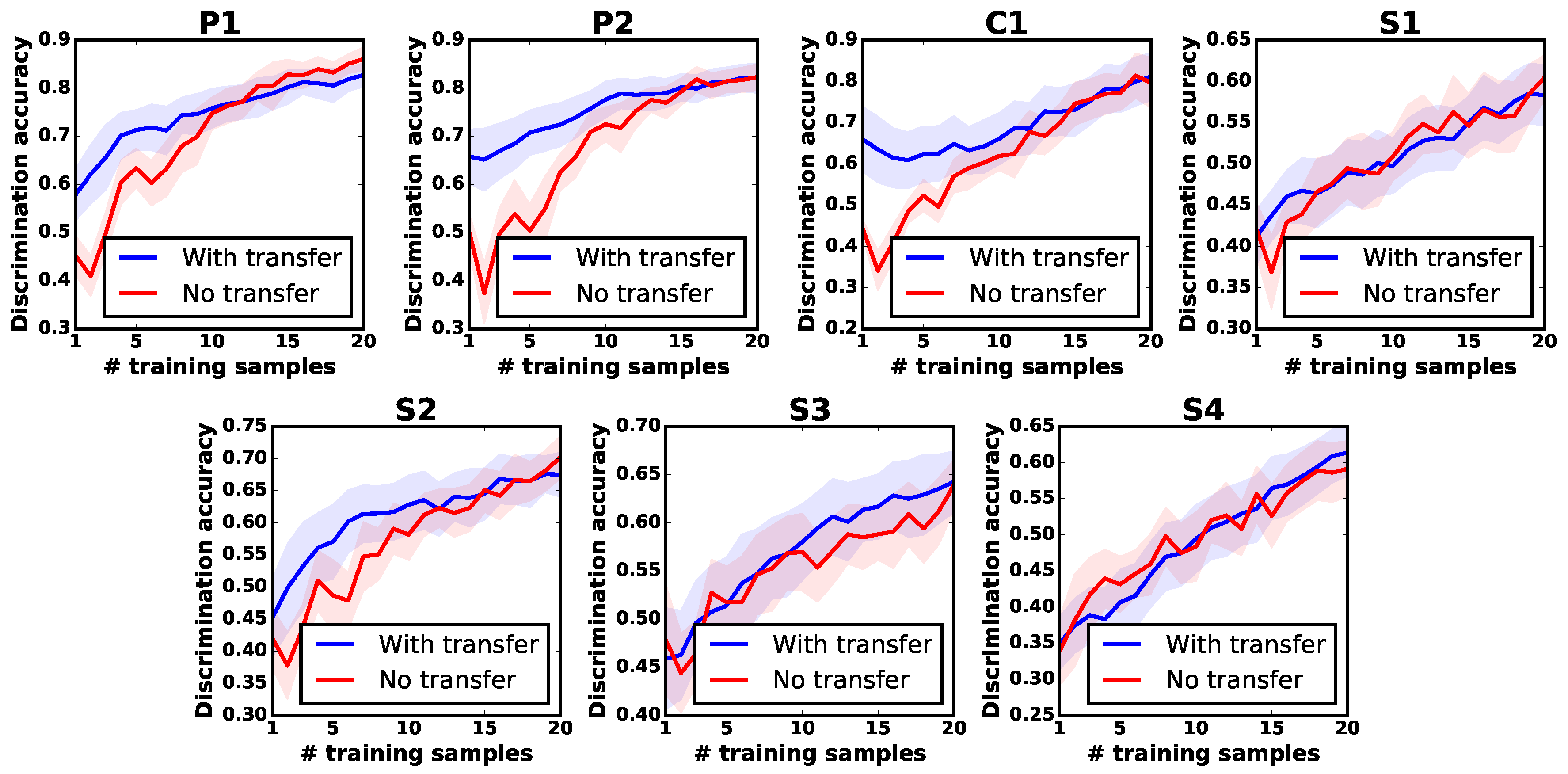
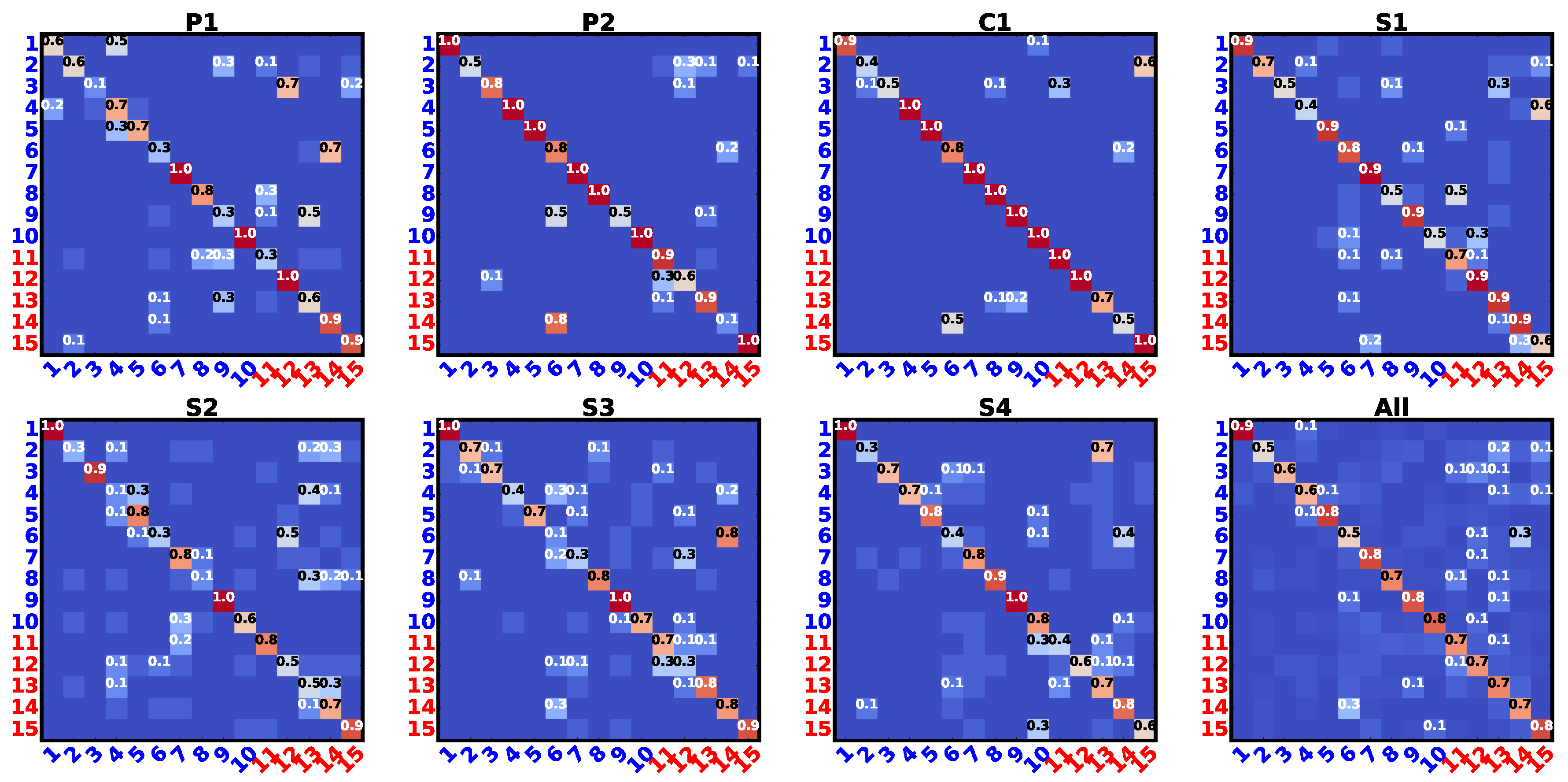
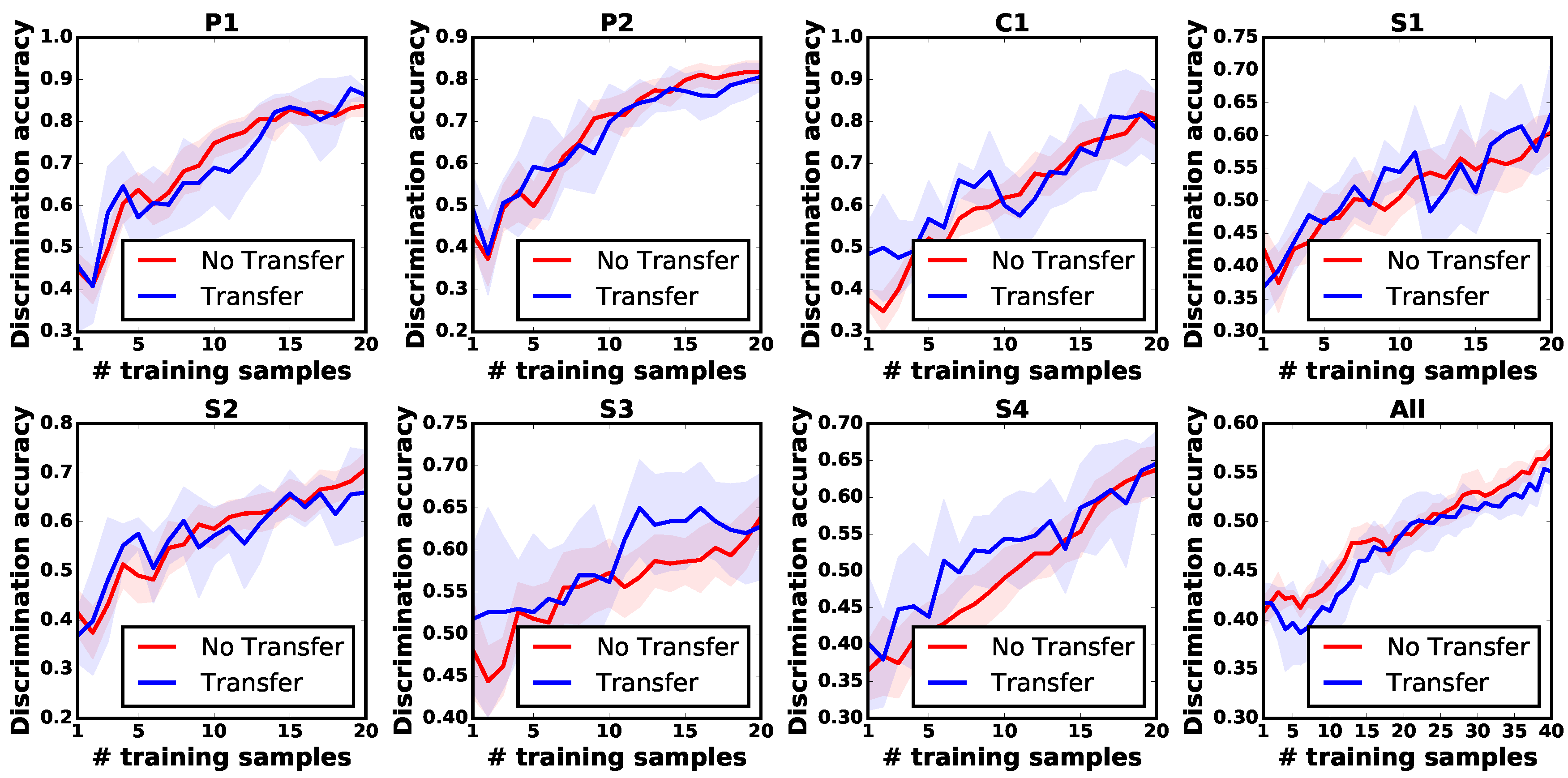
5.4. Evaluation of the Transfer Learning Method with Different Groups of Prior Objects
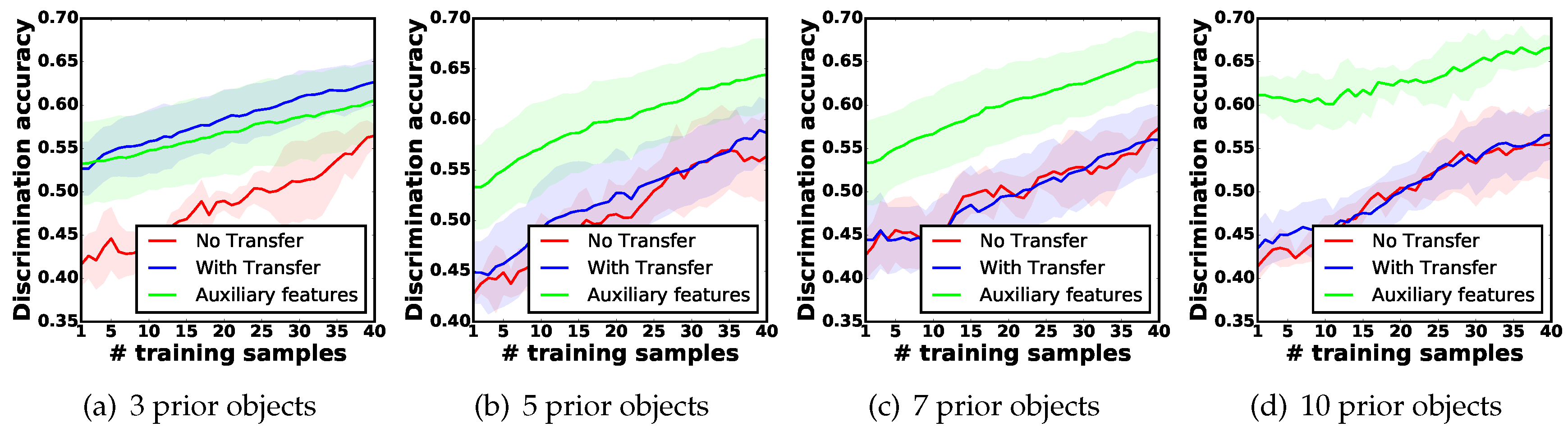
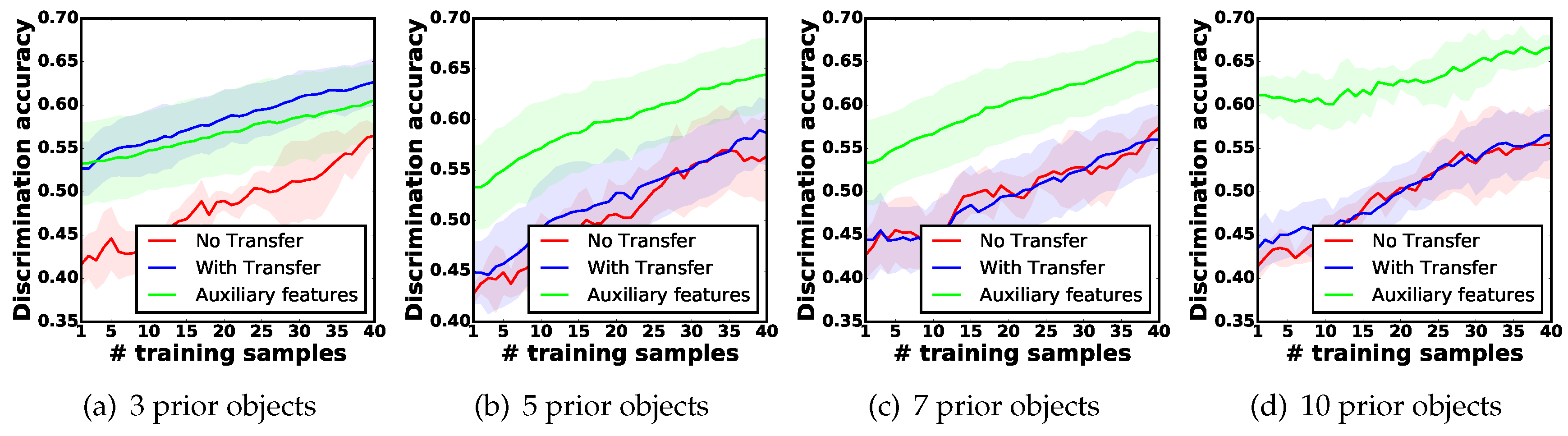
5.5. Increasing the Number of Prior Objects
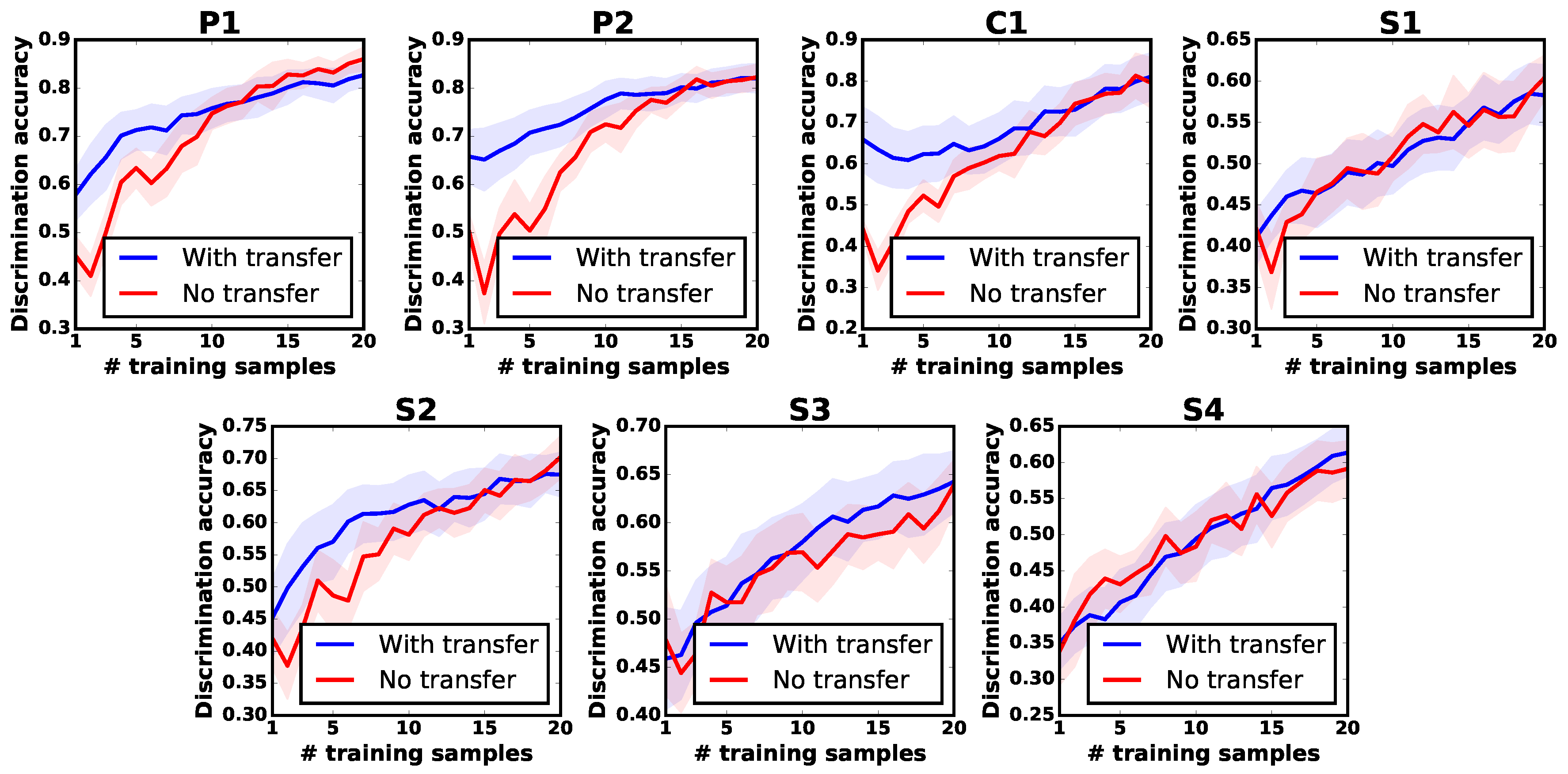
5.6. Negative Prior Tactile Knowledge Transfer Testing
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Lederman, S.J.; Klatzky, R.L. Hand movements: A window into haptic object recognition. Cogn. Psychol. 1987, 19, 342–368. [Google Scholar] [CrossRef]
- Lederman, S.J.; Klatzky, R.L. Haptic classification of common objects: Knowledge-driven exploration. Cogn. Psychol. 1990, 22, 421–459. [Google Scholar] [CrossRef]
- Kaboli, M.; Long, A.; Cheng, G. Humanoids learn touch modalities identification via multi-modal robotic skin and robust tactile descriptors. Adv. Rob. 2015, 29, 1411–1425. [Google Scholar] [CrossRef]
- Pugh, K.J.; Bergin, D.A. Motivational influences on transfer. Educational Psychologist 2006, 41, 147–160. [Google Scholar] [CrossRef]
- Schunk, D. Learning Theories: An Educational Perspective, 4th ed.; Pearson: Upper Saddle River, NJ, USA, 2004; p. 22. ISBN 0130384968. [Google Scholar]
- Cree, V. Transfer of Learning in Professional and Vocational Education; Routledge: Abingdon, UK, 2000; ISBN 0415204186. [Google Scholar]
- Ormrod, J.E. Human Learning, 6th ed.; Pearson: Upper Saddle River, NJ, USA, 2012; ISBN 9780132595186. [Google Scholar]
- Hung, W. Problem-based learning: A learning environment for enhancing learning transfer. New Directions Adult Continuing Educ. 2004, 137, 27–38. [Google Scholar] [CrossRef]
- Choi, S.; Meeuwsen, H.; French, R.; Sherrill, C.; McCabe, R. Motor Skill Acquition, Rentention, and Transfer in Adults with Profound Mental Retardation. Adapted Phys. Act. Q. 2001, 18, 257–272. [Google Scholar] [CrossRef]
- Canini, K.R.; Shashkov, M.M.; Griffiths, T.L. Modeling Transfer Learning in Human Categorization with the Hierarchical Dirichlet Process. In Proceedings of the 27th International Conference on Machine Learning (ICML-10), Haifa, Israel, 21–24 June 2010; pp. 151–158. [Google Scholar]
- Yogeswaran, N.; Dang, W.; Navaraj, W.T.; Shakthivel, D.; Khan, S.; Polat, E.O.; Gupta, S.; Heidari, H.; Kaboli, M.; Lorenzelli, L.; et al. New materials and advances in making electronic skin for interactive robots. Adv. Rob. 2015, 29, 1359–1373. [Google Scholar] [CrossRef]
- Mittendorfer, P.; Cheng, G. Humanoid multimodal tactile-sensing modules. IEEE Trans. Rob. 2011, 27, 401–410. [Google Scholar] [CrossRef]
- Jamali, N.; Sammut, C. Material classification by tactile sensing using surface textures. In Proceedings of the 2010 IEEE International Conference Robotics and Automation (ICRA), Anchorage, AK, USA, 3–7 May 2010; pp. 2336–2341. [Google Scholar]
- Chu, V.; McMahon, I.; Riano, L.; McDonald, C.G.; He, Q.; Perez-Tejada, J.M.; Arrigo, M.; Fitter, N.; Nappo, J.C.; Darrell, T.; et al. Using robotic exploratory procedures to learn the meaning of haptic adjectives. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation (ICRA), Karlsruhe, Germany, 6–10 May 2013; pp. 3048–3055. [Google Scholar]
- Papakostas, T.V.; Lima, J.; Lowe, M. A large area force sensor for smart skin applications. Proc. IEEE. 2002, 2, 1620–1624. [Google Scholar]
- Song, A.; Han, Y.; Hu, H.; Li, J. A novel texture sensor for fabric texture measurement and classification. IEEE Trans. Instrum. Meas. 2014, 63, 1739–1747. [Google Scholar] [CrossRef]
- Watanabe, K.; Sohgawa, M.; Kanashima, T.; Okuyama, M.; Norna, H. Identification of various kinds of papers using multi-axial tactile sensor with micro-cantilevers. In Proceedings of the World Haptics Conference (WHC), Daejeon, Korea, 14–18 April 2013; pp. 139–144. [Google Scholar]
- Kaboli, M.; Mittendorfer, P.; Hügel, V.; Cheng, G. Humanoids learn object properties from robust tactile feature descriptors via multi-modal artificial skin. In Proceedings of the 14th IEEE International Conference on Humanoid Robots (Humanoids), Madrid, Spain, 18–20 November 2014; pp. 187–192. [Google Scholar]
- Friedl, K.E.; Voelker, A.R.; Peer, A.; Eliasmith, C. Human-inspired neurorobotic system for classifying surface textures by touch. IEEE Rob. Autom. Lett. 2016, 1, 516–523. [Google Scholar] [CrossRef]
- Kaboli, M.; Cheng, G. Robust Tactile Descriptors for Discriminating Objects from Textural Properties via Artificial Robotic Skin. IEEE Trans. Rob. 2018, 9, 1–19. [Google Scholar]
- Kaboli, M.; Rosa, A.D.L.T.; Walker, R.; Cheng, G. In-hand object recognition via texture properties with robotic hands, artificial skin, and novel tactile descriptors. In Proceedings of the IEEE International Conference on Humanoid Robots (Humanoids), Seoul, South Korea, 3–5 November 2015; pp. 1155–1160. [Google Scholar]
- Bhattacharjee, T.; Wade, J.; Kemp, C. Material Recognition from Heat Transfer given Varying Initial Conditions and Short-Duration Contact. In Proceedings of the Robotics: Science and Systems, Rome, Italy, 13–17 July 2015; pp. 1–6. [Google Scholar]
- Yao, K.; Kaboli, M.; Cheng, G. Tactile-based Object Center of Mass Exploration and Discrimination. In Proceedings of the IEEE International Conference on Humanoid Robots (Humanoids), Birmingham, UK, 15–17 November 2017; pp. 1–6. [Google Scholar]
- Bhattacharjee, T.; Rehg, M.J.; Kemp, C. Inferring Object Properties with a Tactile Sensing Array Given Varying Joint Stiffness and Velocity. Int. J. Humanoid Rob. 2017, 14, 1–32. [Google Scholar] [CrossRef]
- Zhang, M.M.; Atanasov, N.; Daniilidis, K. Active end-effector pose selection for tactile object recognition through monte carlo tree search. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 3258–3265. [Google Scholar]
- Martinez-Hernandez, U.; Dodd, T.J.; Prescott, T.J. Feeling the shape: Active exploration behaviors for object recognition with a robotic hand. IEEE Trans. Syst. Man Cybern. Syst. 2017, 99, 1–10. [Google Scholar] [CrossRef]
- Xu, D.; Loeb, G.E.; Fishel, J.A. Tactile identification of objects using Bayesian exploration. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Karlsruhe, Germany, 6–10 May 2013; pp. 3056–3061. [Google Scholar]
- Schneider, A.; Sturm, J.; Stachniss, C.; Reisert, M.; Burkhardt, H.; Burgard, W. Object identification with tactile sensors using bag-of-features. In Proceedings of the IEEE RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 10–15 October 2009; pp. 243–248. [Google Scholar]
- Lepora, N.F.; Martinez-Hernandez, U.; Prescott, T.J. Active touch for robust perception under position uncertainty. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation (ICRA), Karlsruhe, Germany, 6–10 May 2013; pp. 3020–3025. [Google Scholar]
- Fishel, J.A.; Loeb, G.E. Bayesian exploration for intelligent identification of textures. Front. Neurorobotics 2012, 6, 1–20. [Google Scholar]
- Saal, H.; Ting, J.A.; Vijayakumar, S. Active sequential learning with tactile feedback. In Proceedings of the Thirteenth International Conference on Artificial Intelligence and Statistics, Taipei, Taiwan, 18–22 October 2010; pp. 677–684. [Google Scholar]
- Tanaka, D.; Matsubara, T.; Sugimoto, K. An optimal control approach for exploratory actions in active tactile object recognition. In Proceedings of the 2014 IEEE-RAS International Conference on Humanoid Robots, Madrid, Spain, 18–20 November 2014; pp. 787–793. [Google Scholar]
- Guo, H.L.; Zhang, L.; Su, Z. Empirical study on the performance stability of named entity recognition model across domains. In Proceedings of the 2006 Conference on Empirical Methods in Natural Language Processing, Sydney, Australia, 22–23 July 2006; pp. 509–516. [Google Scholar]
- Yang, Q. Activity Recognition: Linking Low-level Sensors to High-level Intelligence. IJCAI 2009, 9, 20–25. [Google Scholar]
- Tommasi, T.; Orabona, F.; Caputo, B. Safety in numbers: Learning categories from few examples with multi model knowledge transfer. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), San Francisco, CA, USA, 13–18 June 2010; pp. 3081–3088. [Google Scholar]
- Tommasi, T.; Orabona, F.; Kaboli, M.; Caputo, B.; Martigny, C. Leveraging over prior knowledge for online learning of visual. In Proceedings of the British Machine Vision Conference categories, Guildford, UK, 3–7 September 2012; pp. 1–8. [Google Scholar]
- Kaboli, M. Leveraging over Prior Knowledge for Online Learning of Visual Categories across Robots. Thesis Dissertation, The Royal Institute of Technology (KTH), Stockholm, Sweden, 2012. [Google Scholar]
- Rodner, E.; Denzler, J. One-shot learning of object categories using dependent gaussian processes. In Joint Pattern Recognition Symposium; Springer: Berlin/Heidelberg, Germany, 2010; Volume 637, pp. 232–241. [Google Scholar]
- Yang, X.; Kim, S.; Xing, E.P. Heterogeneous multitask learning with joint sparsity constraints. In Proceedings of the Advances in Neural Information Processing Systems, Vancouver, BC, Canada, 7–10 December 2009; pp. 2151–2159. [Google Scholar]
- Kaboli, M.; Walker, R.; Cheng, G. Re-using prior tactile experience by robotic hands to discriminate in-hand objects via texture properties. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 2242–2247. [Google Scholar]
- Kaboli, M.; Cheng, G. Novel Tactile Descriptors and a Tactile Transfer Learning Technique for Active In-Hand Object Recognition via Texture Properties. In Proceedings of the IEEE International Conference on Humanoid Robots (Humanoids), Cancun, Mexico, 15 November 2016; pp. 1–6. [Google Scholar]
- Kaboli, M.; Cheng, G. Dexterous hands learn to re-use the past experience to discriminate in-hand objects from the surface texture. In Proceedings of the 33rd Annual Conference of the Robotics Society of Japan, Tokyo, Japan, 3–5 September 2015; pp. 1–6. [Google Scholar]
- Kaboli, M.; Di, F.; Kunpeng, Y.; Pablo, L.; Cheng, G. A Tactile-based Framework for Active Object Learning and Discrimination using Multi-modal Robotic Skin. IEEE Rob. Autom. Lett. 2017, 2, 2143–2150. [Google Scholar] [CrossRef]
- Kaboli, M.; Kunpeng, Y.; Di, F.; Cheng, G. Tactile-based active object discrimination and target object search in an unknown workspace. Autonom. Rob. 2018, 2, 1–35. [Google Scholar] [CrossRef]
- Kaboli, M.; Di, F.; Cheng, G. Active Tactile Transfer Learning for Object Discrimination in an Unstructured Environment using Multimodal Robotic Skin. Int. J. Humanoid Rob. 2017, 15, 1–27. [Google Scholar] [CrossRef]
- Rasmussen, C.E.; Williams, C.K.I. Gaussian processes for machine learning; MIT Press: Cambridge/London, UK, 2006. [Google Scholar]
- Chai, K.M. Generalization errors and learning curves for regression with multi-task Gaussian processes. In Advances in neural information processing systems; MIT Press: Cambridge/London, UK, 2009; pp. 279–287. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Sensor | Range | Accuracy | Resolution |
|---|---|---|---|---|
| Proximity | VCNL4010 | N.A. | lx | |
| Acceleration | BMA250 | mg | ||
| Temperature | LM71 | −40–150 °C | ||
| Normal force | customized | > | N.A. |
| Exploratory actions | Action Parameters () | Sensory feedbacks | Features |
|---|---|---|---|
| Pressing | , | , | , |
| Sliding | , , | , | , |
| Static contact | , | , | , |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Feng, D.; Kaboli, M.; Cheng, G. Active Prior Tactile Knowledge Transfer for Learning Tactual Properties of New Objects. Sensors 2018, 18, 634. https://doi.org/10.3390/s18020634
Feng D, Kaboli M, Cheng G. Active Prior Tactile Knowledge Transfer for Learning Tactual Properties of New Objects. Sensors. 2018; 18(2):634. https://doi.org/10.3390/s18020634
Chicago/Turabian StyleFeng, Di, Mohsen Kaboli, and Gordon Cheng. 2018. "Active Prior Tactile Knowledge Transfer for Learning Tactual Properties of New Objects" Sensors 18, no. 2: 634. https://doi.org/10.3390/s18020634
APA StyleFeng, D., Kaboli, M., & Cheng, G. (2018). Active Prior Tactile Knowledge Transfer for Learning Tactual Properties of New Objects. Sensors, 18(2), 634. https://doi.org/10.3390/s18020634