Distributed Water Pollution Source Localization with Mobile UV-Visible Spectrometer Probes in Wireless Sensor Networks


Abstract
:1. Introduction
2. WSNs for Water Quality Monitoring
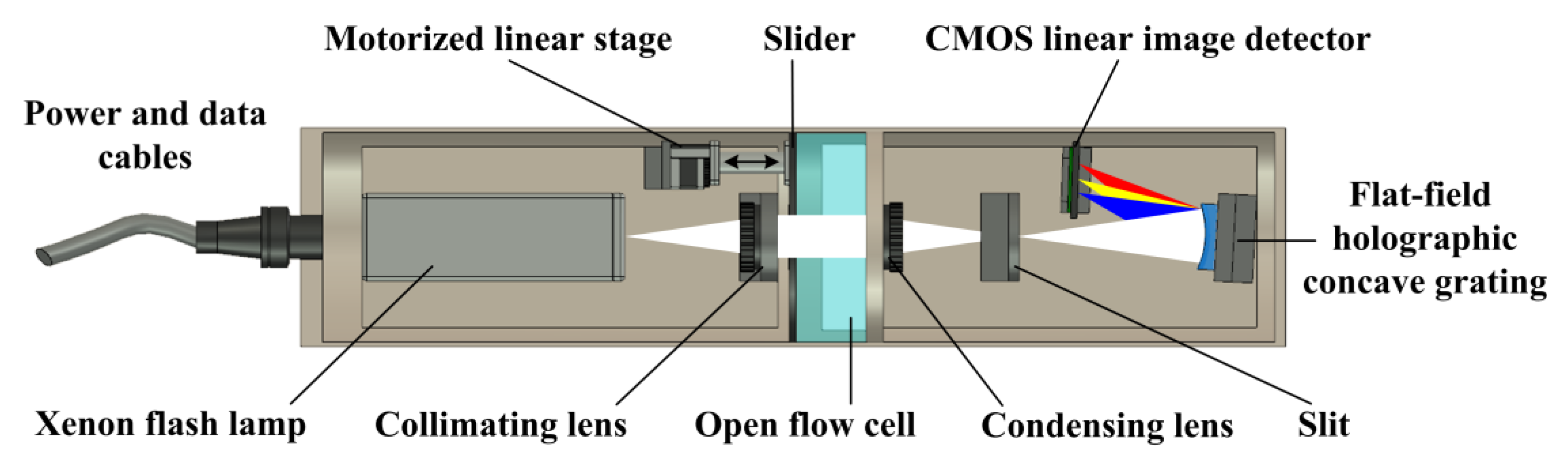
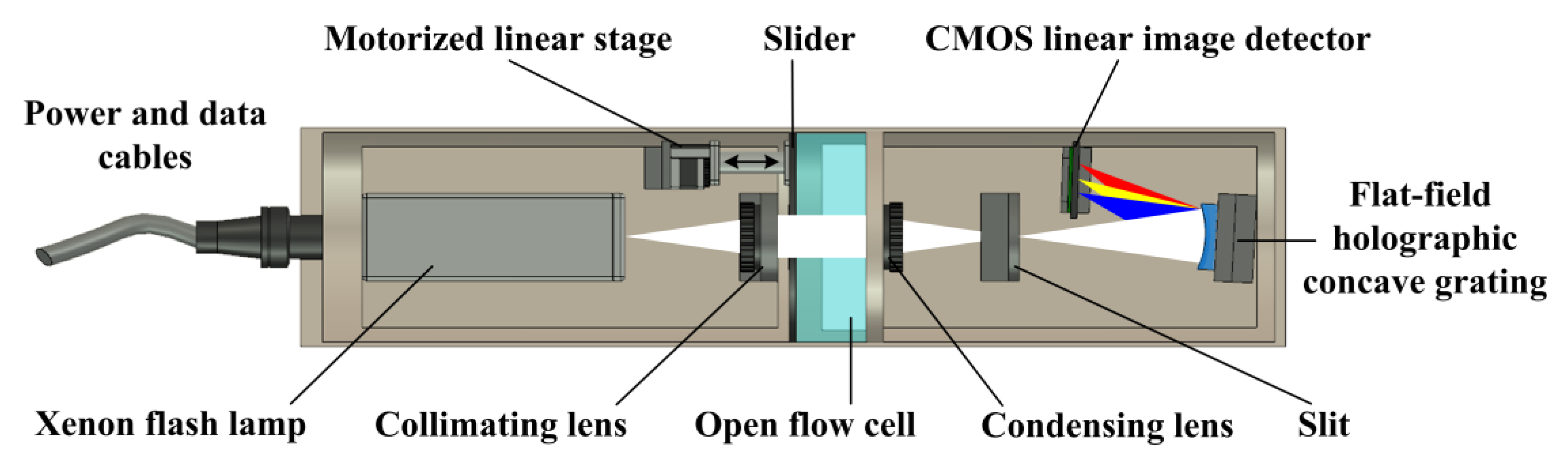
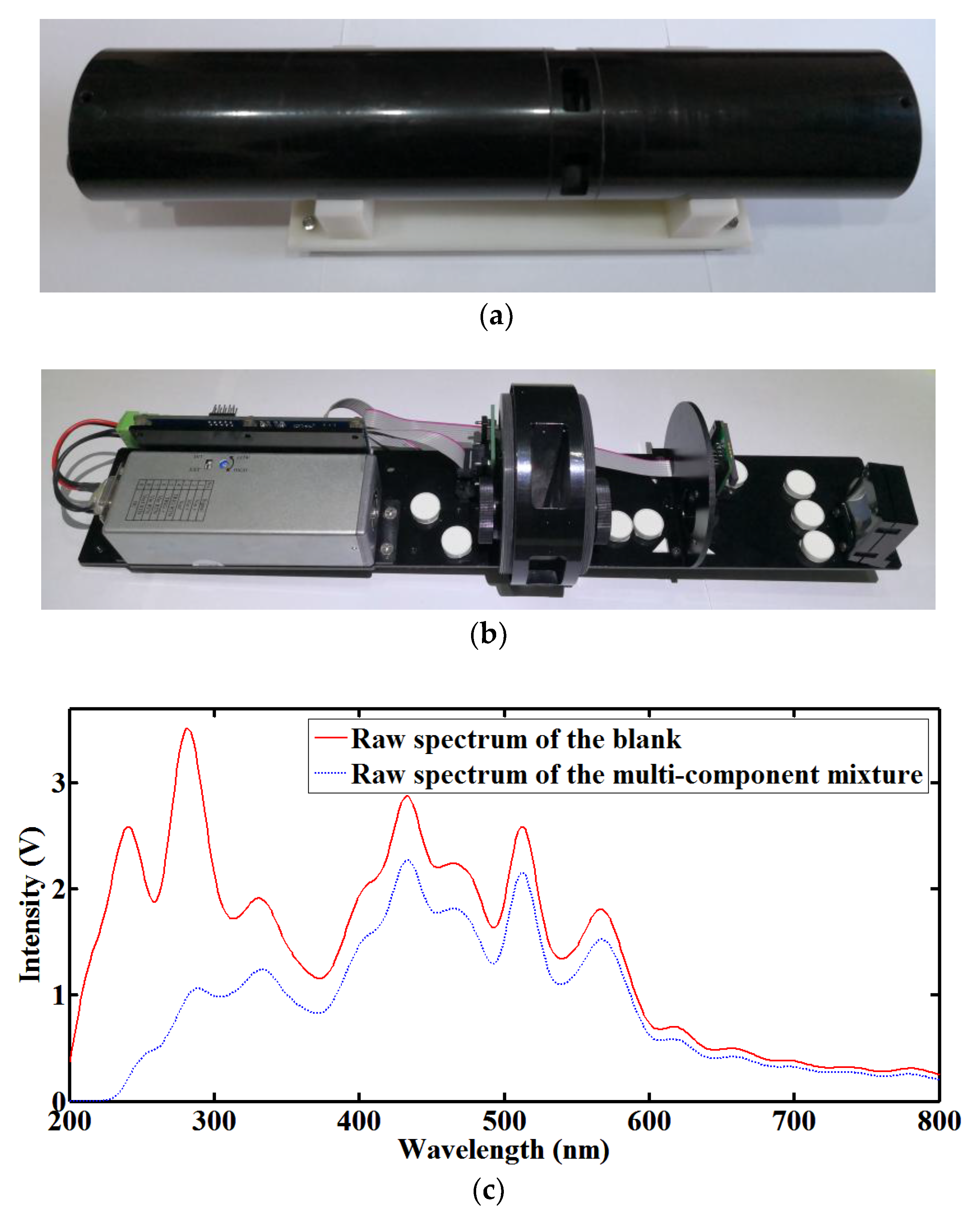
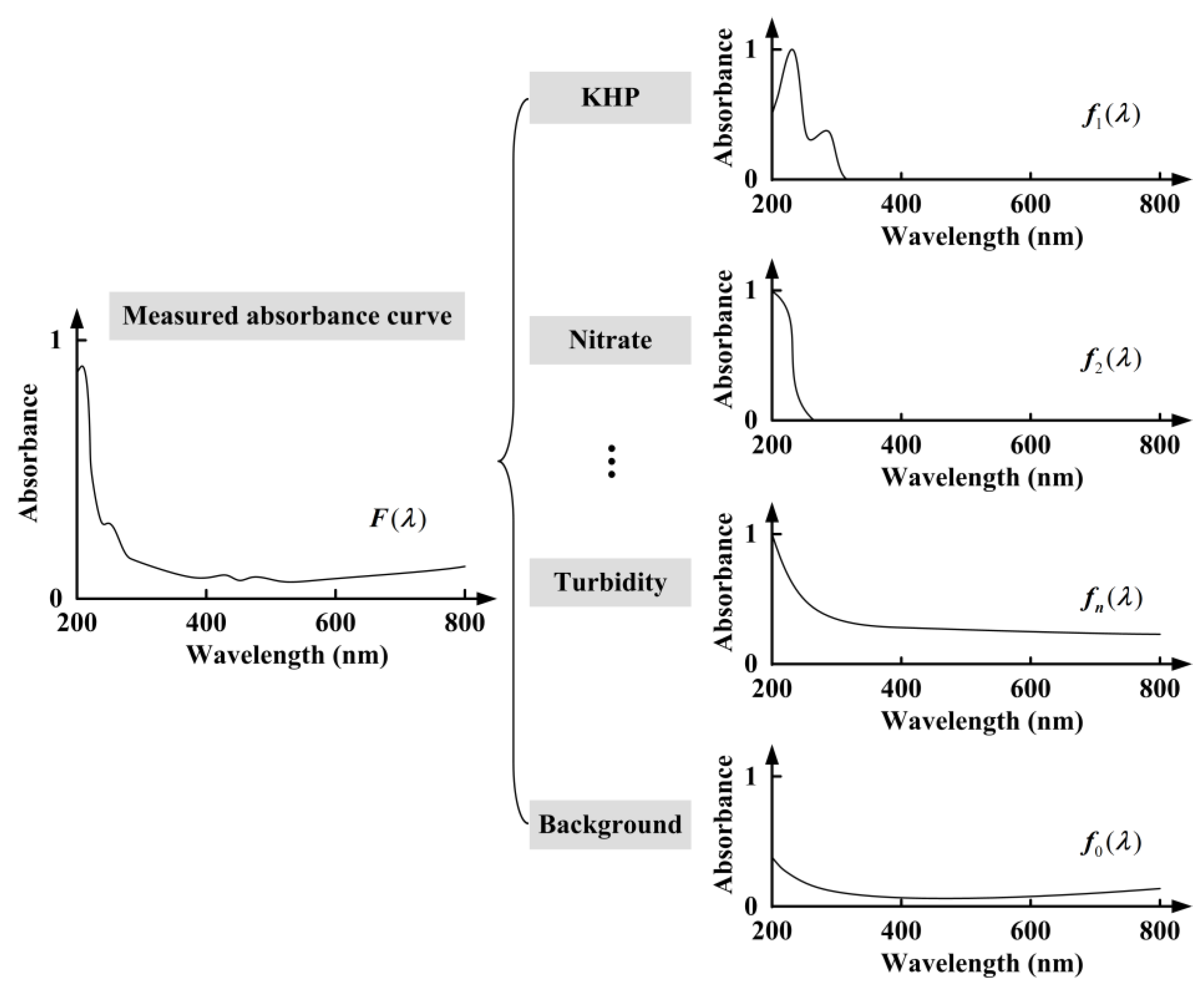
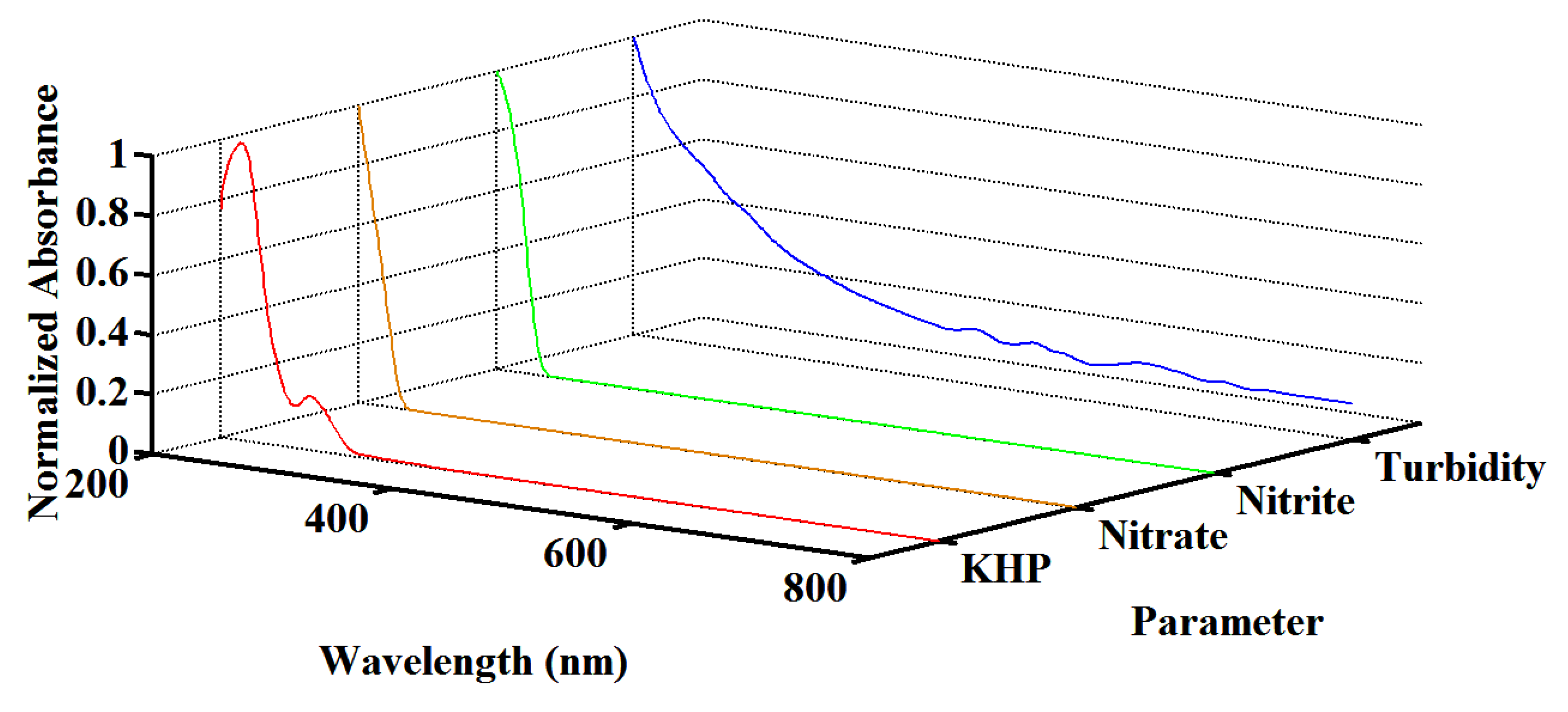
2.1. UV-Visible Spectrometer Probes with Adaptive Optical Path
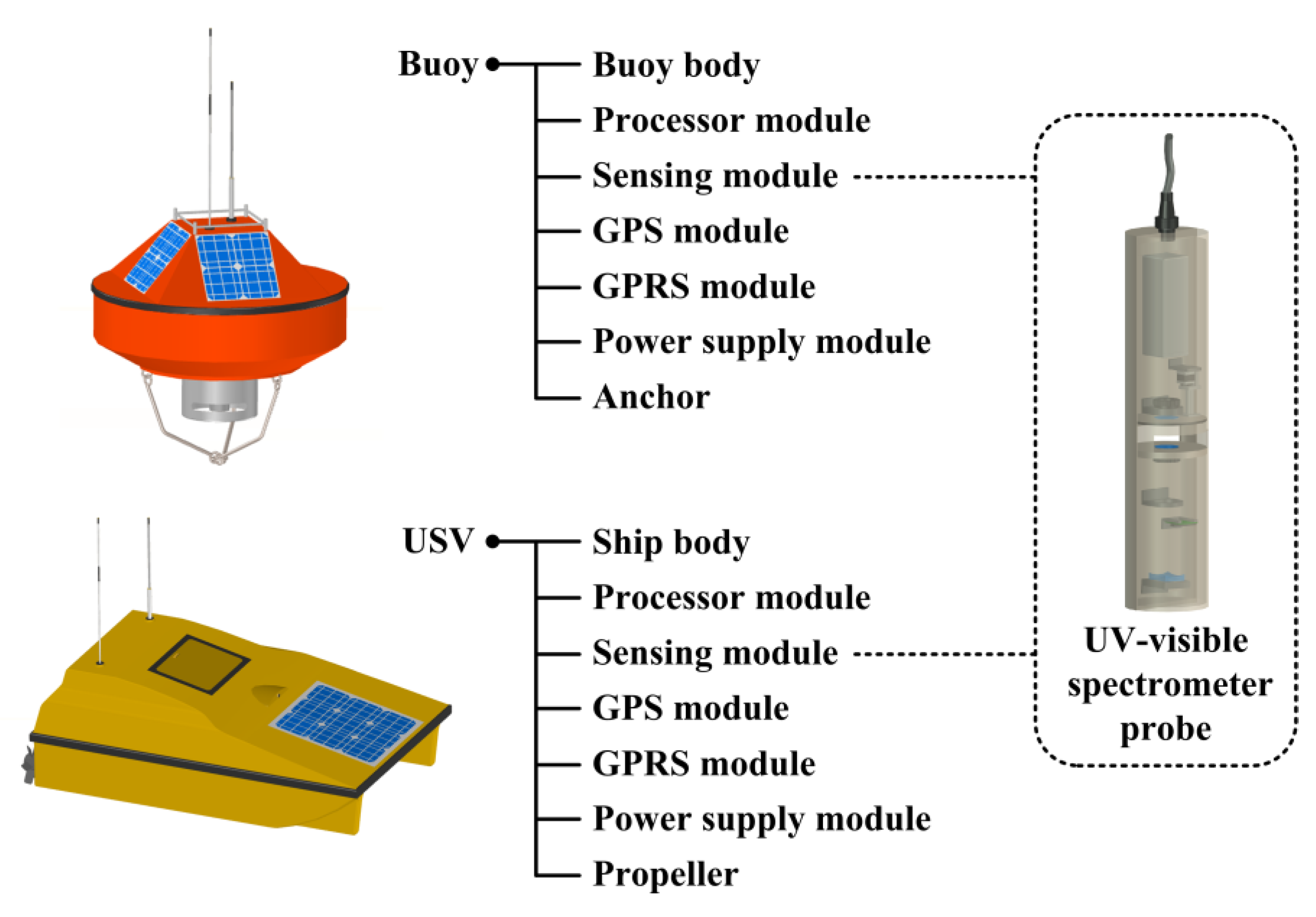
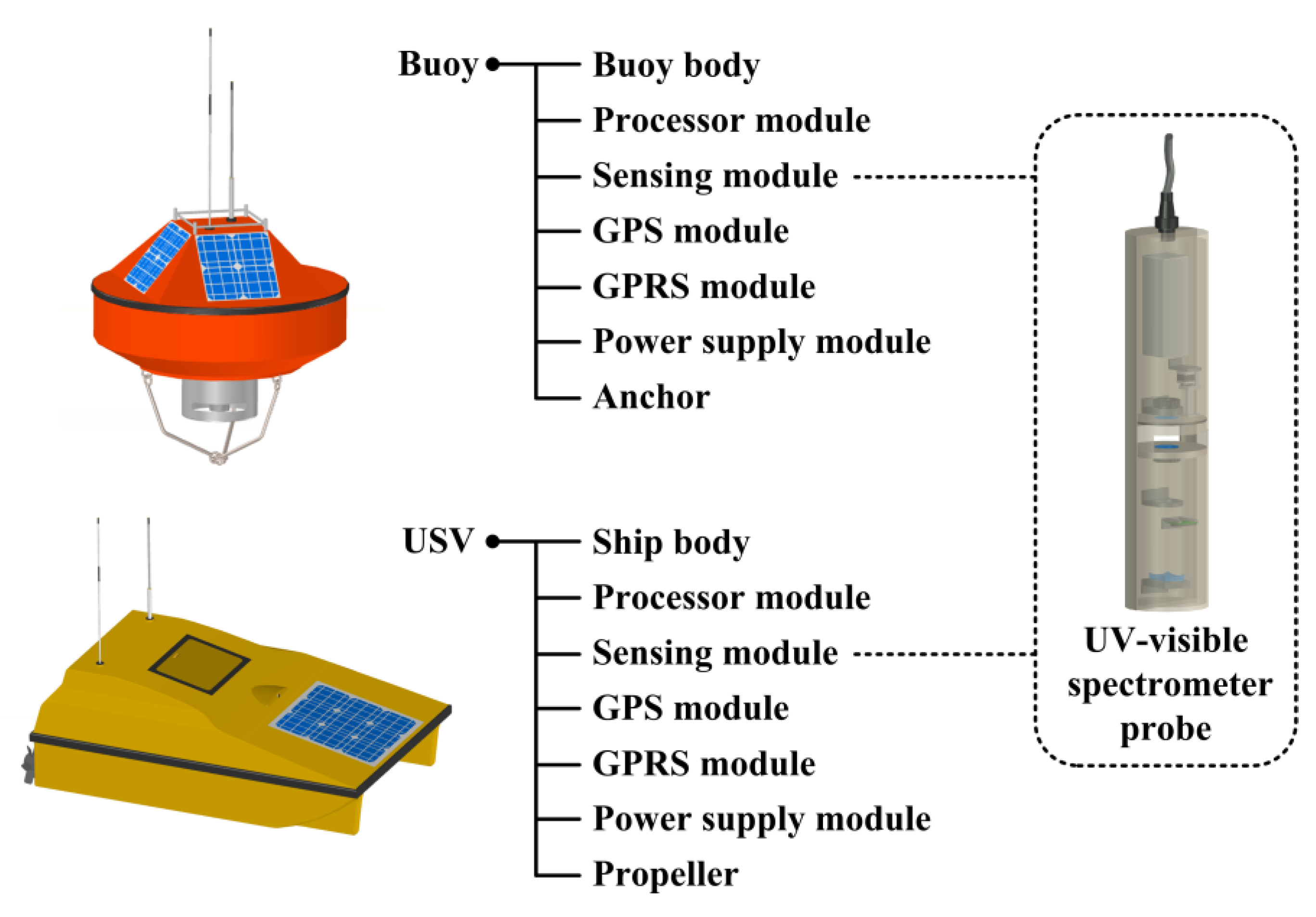
2.2. Stationary and Mobile Wireless Sensor Nodes
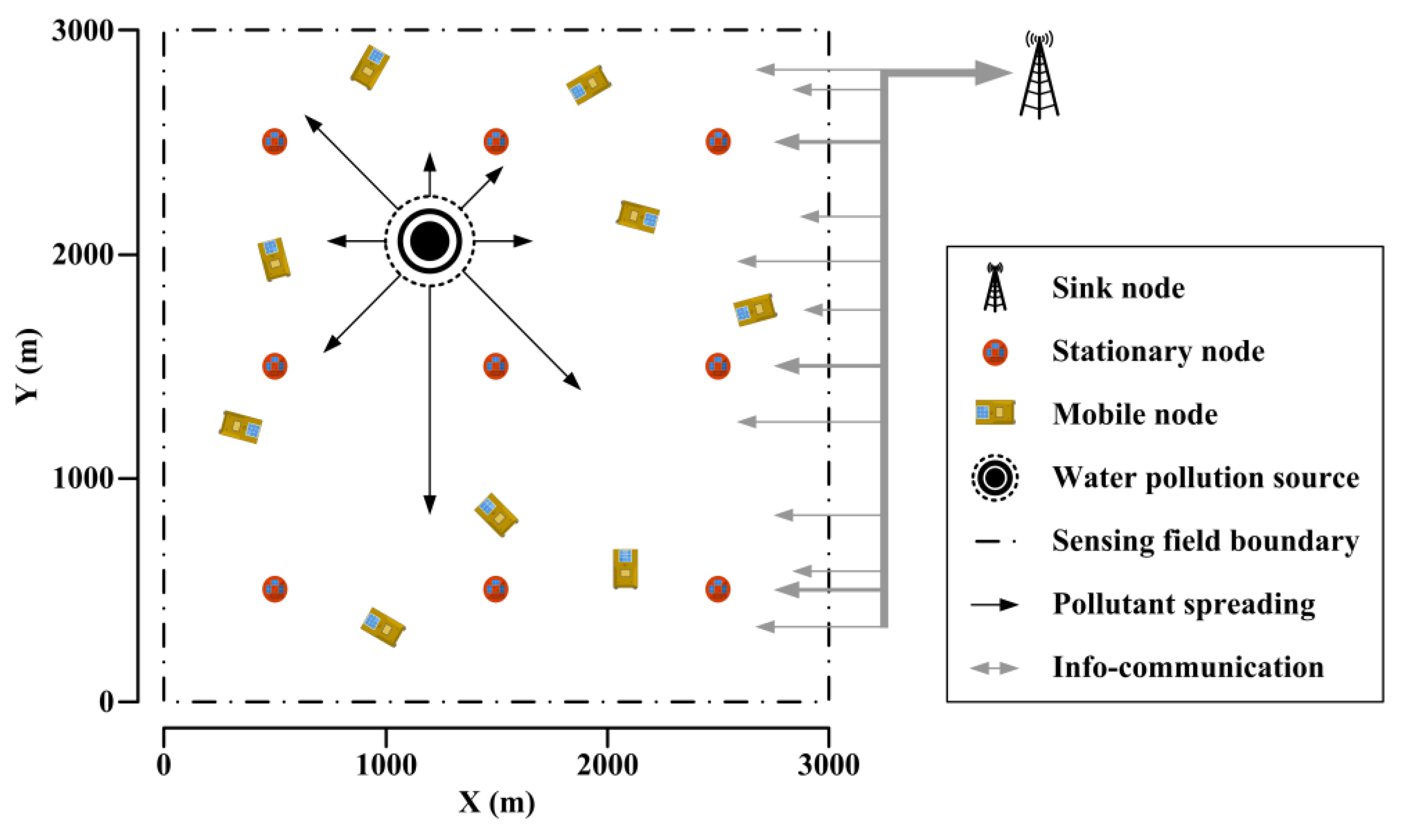
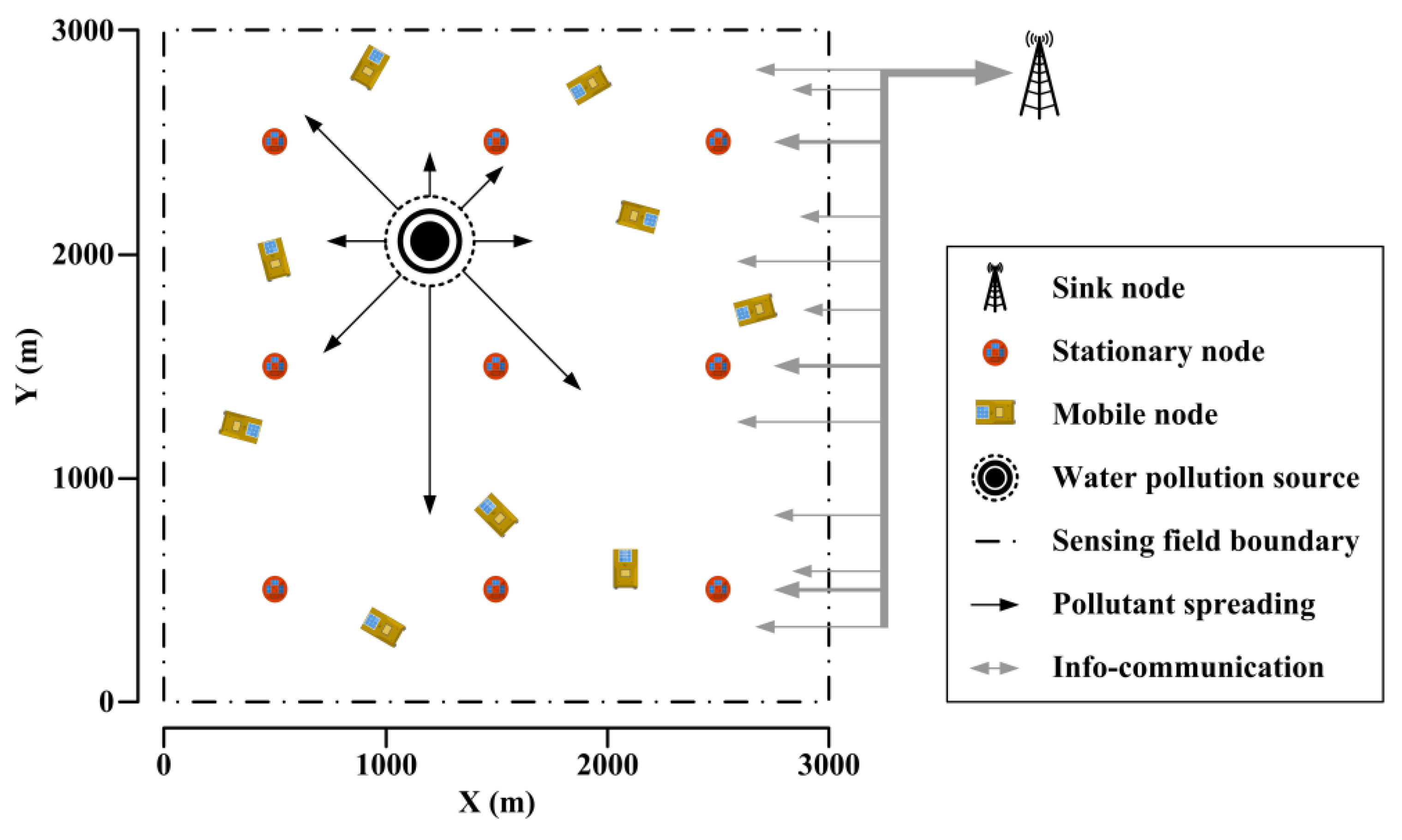
2.3. Deployment for Water Quality Monitoring
3. Distributed Water Pollution Source Localization Method
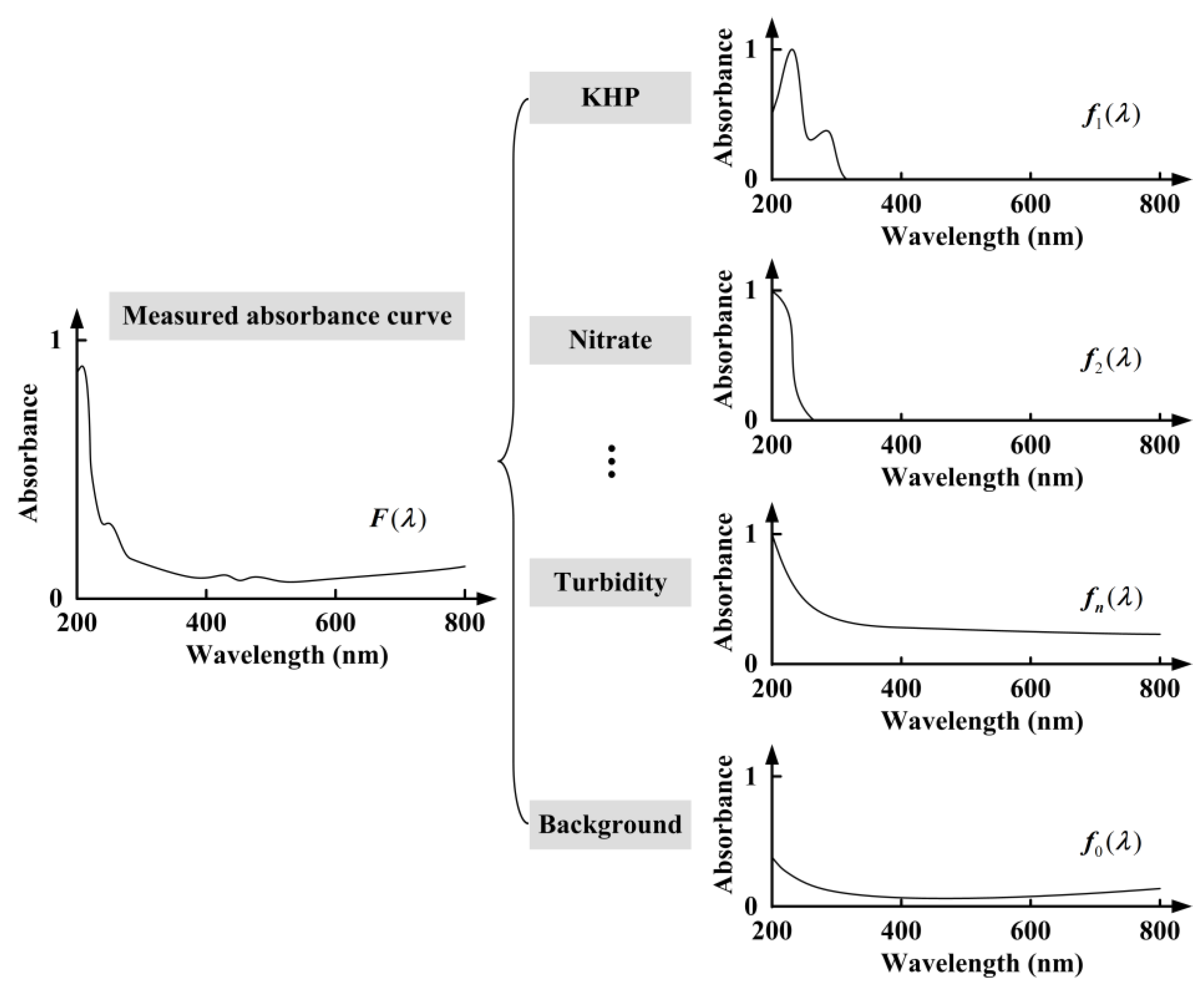
3.1. Problem Formulation
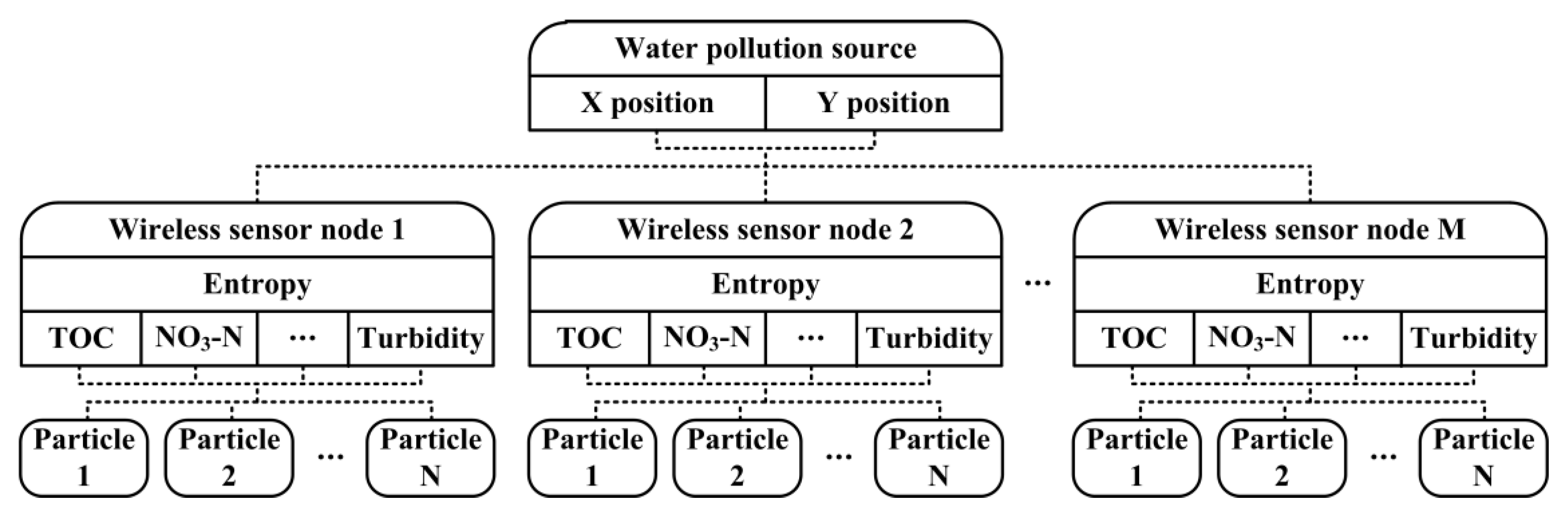
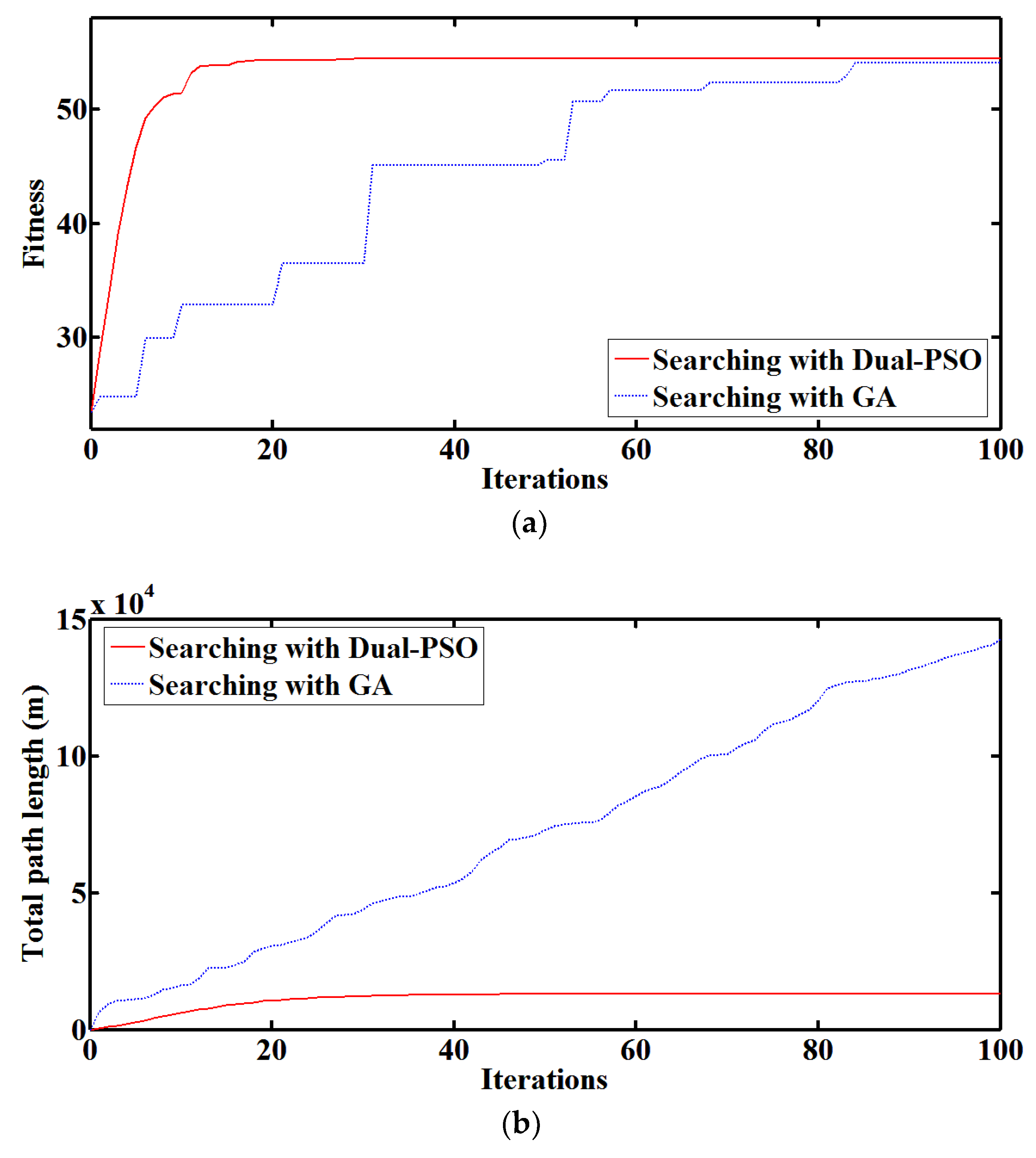
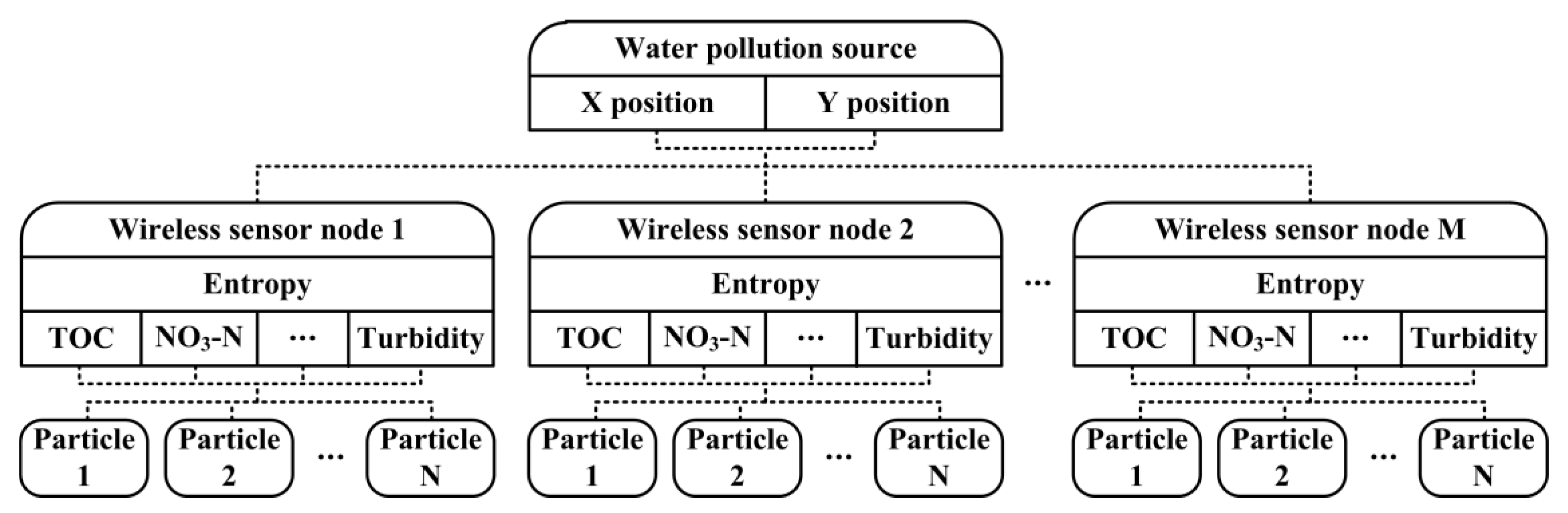
3.2. Dual-PSO Algorithm
| Algorithm 1: Dual-PSO |
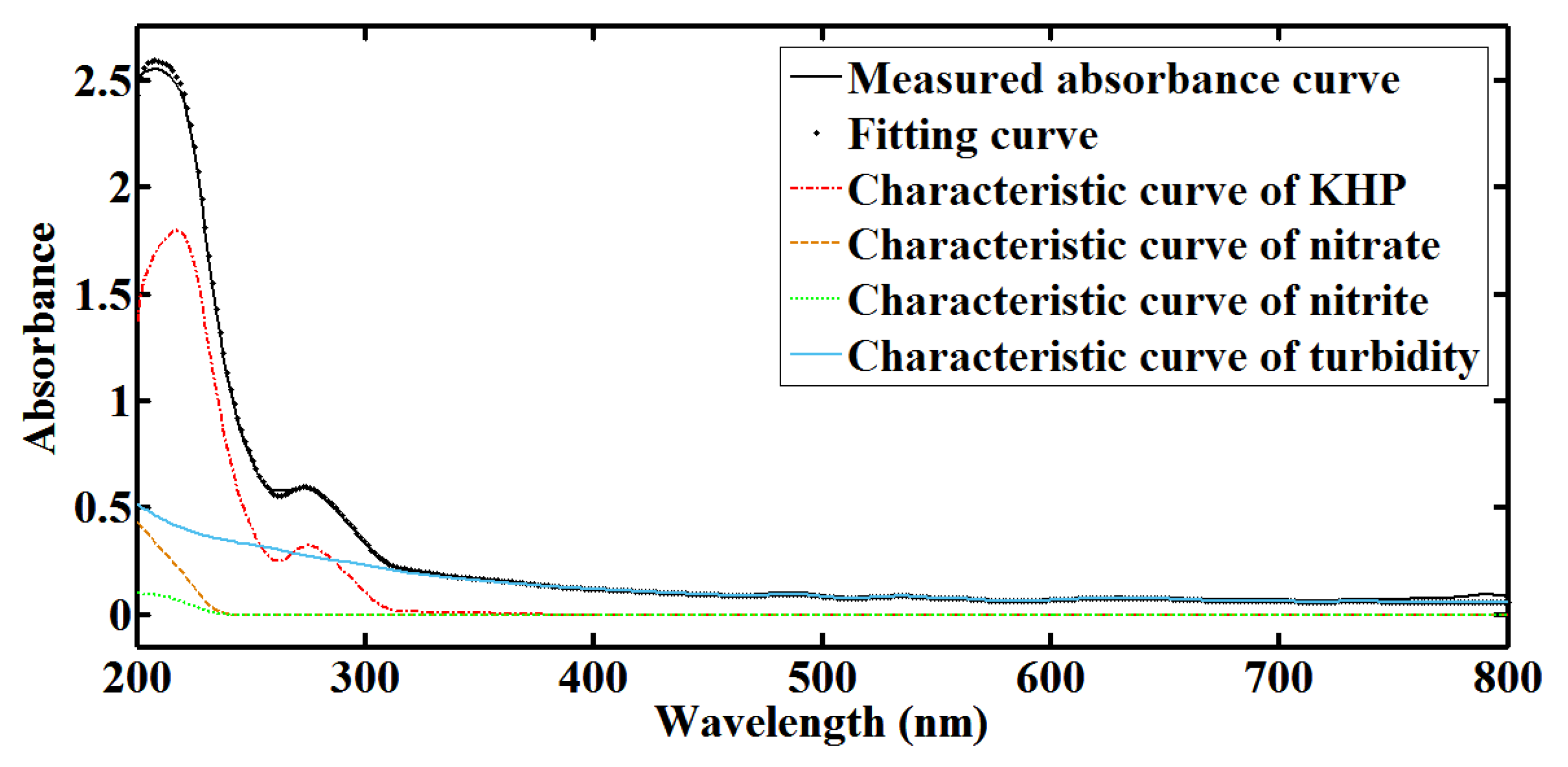
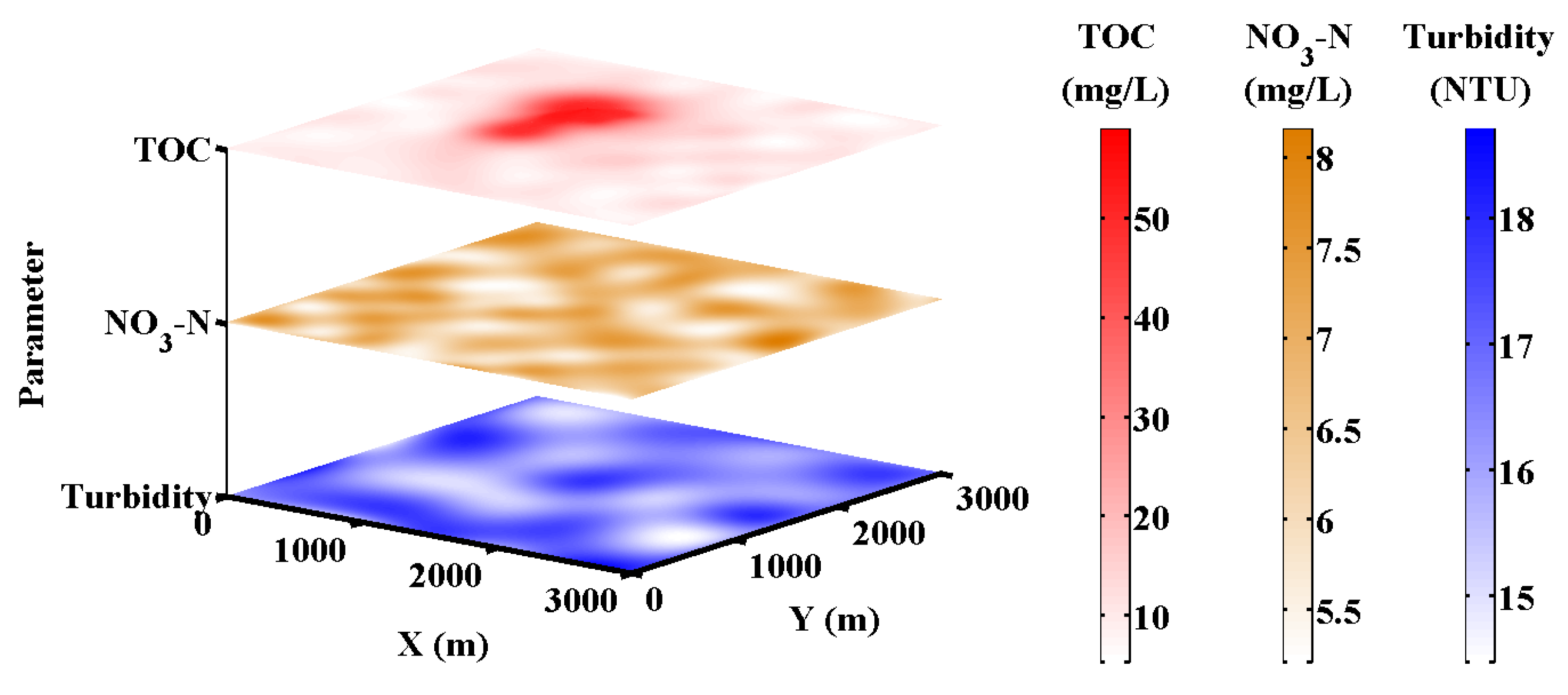
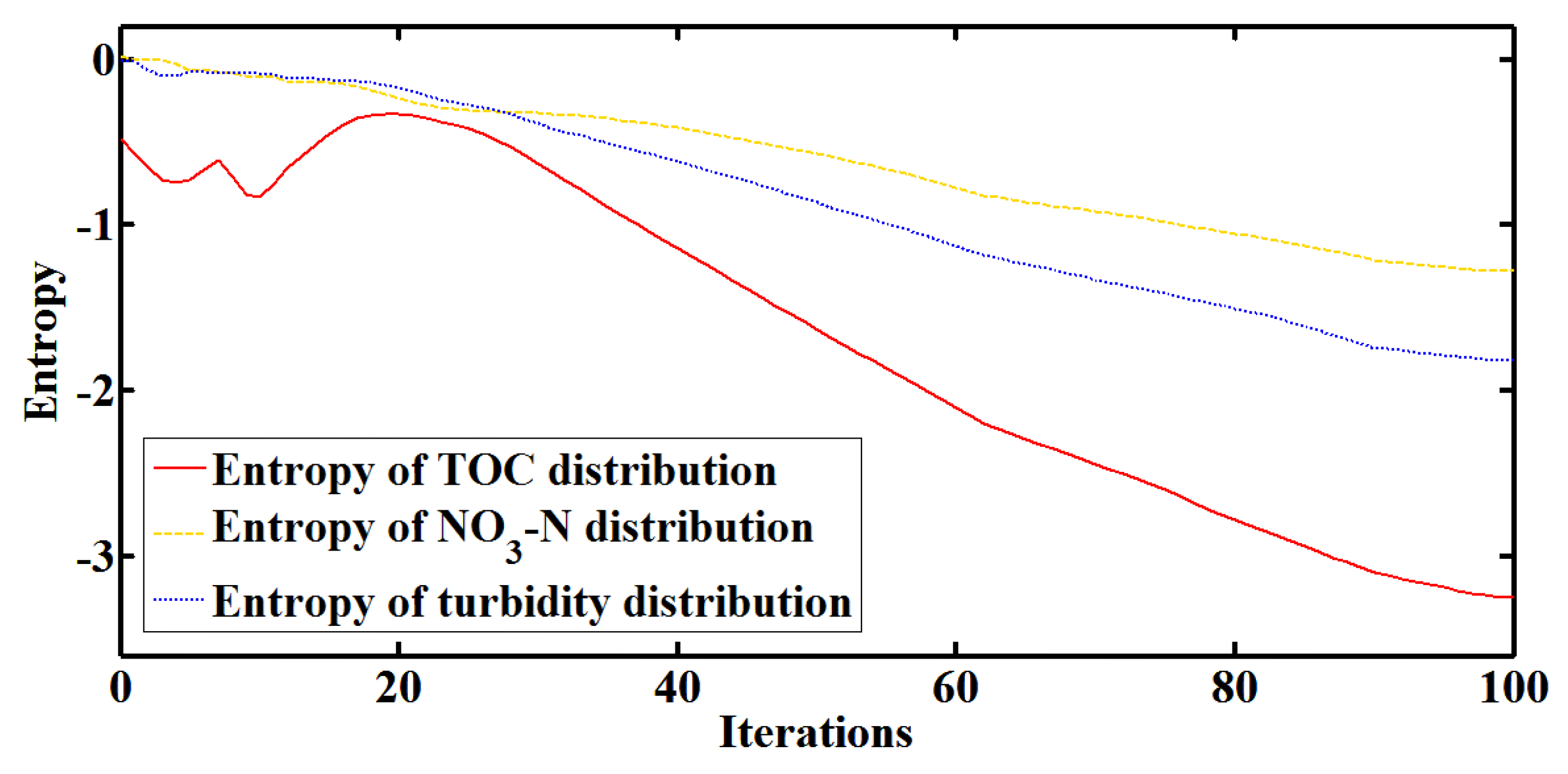
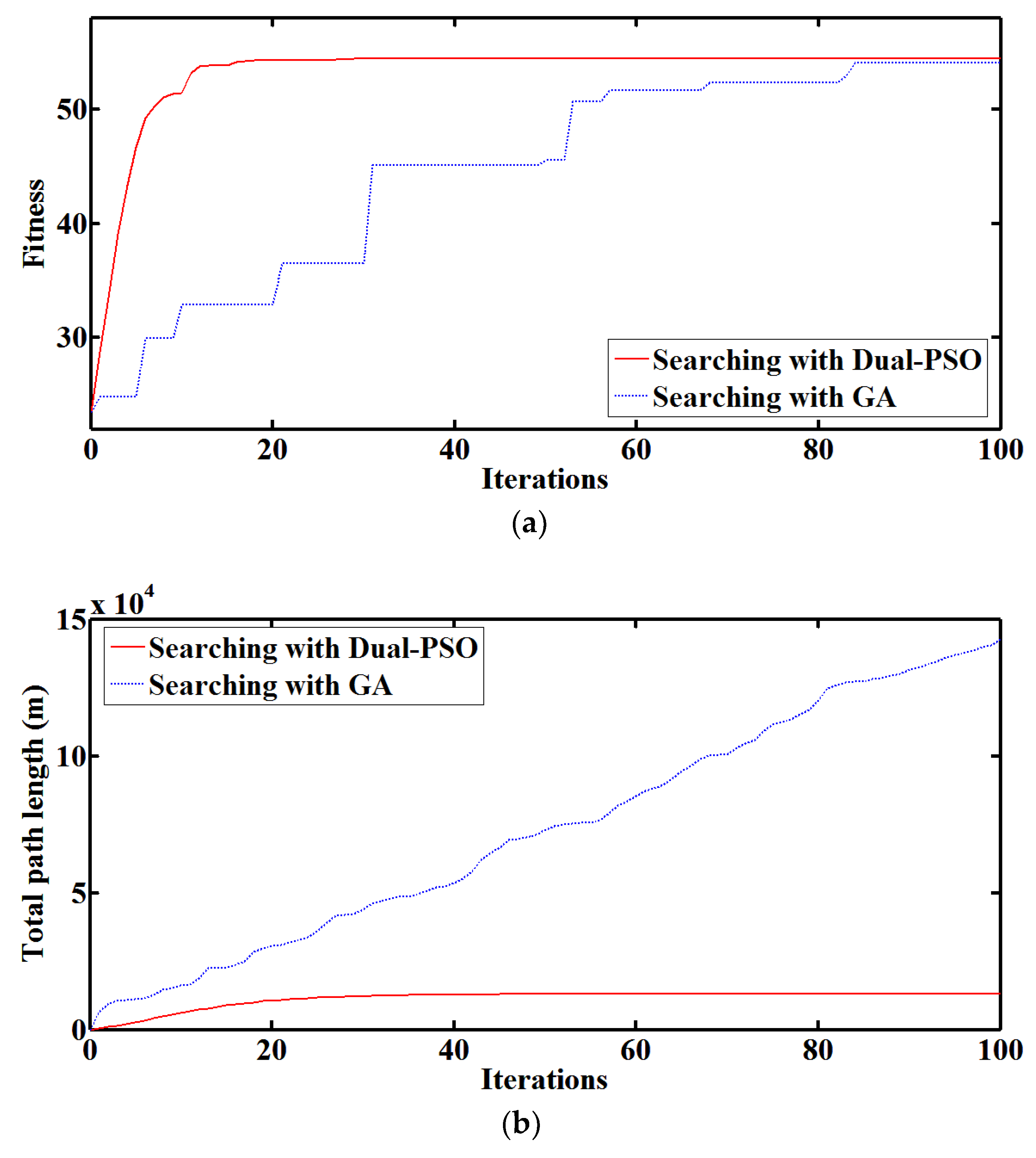
| One PSO procedure is performed globally to search for the water pollution source on the sink node and wireless sensor nodes. It is assumed that there are M wireless sensor nodes, of which s are stationary nodes and m are mobile nodes. For represents the current position of wireless sensor node α: The maximum iteration of global PSO is set as . For For The absorbance level on wireless sensor node α is defined as: Assuming the current optical path is: With the adjusted optical path , the absorbance curve is updated. The other PSO procedure is performed locally to compute water quality multi-parameter measurements on wireless sensor node and the population of particles is set as N. For represents the current solution, initialized randomly in the solution space: The maximum iteration of local PSO is set as . For The global best solution is defined as: The weighted particle velocity is updated as: The solution of each particle is updated as: End The optimization result of the proportionality coefficients is recorded as: A discrete function of water quality multi-parameter distribution is maintained as: The entropy of water quality multi-parameter distribution is evaluated. For The discrete distribution function of parameter i is given. Measurements in its range are sorted in ascending order as: The entropies are compared, and parameter γ with the minimum entropy is recognized as the most sensitive parameter of the water pollution source. The global best position is defined as: The weighted velocity is updated as: The new position of each wireless sensor node is scheduled as: End The optimization result of the water pollution source position is recorded. |
4. Results and Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Gholizadeh, M.H.; Melesse, A.M.; Reddi, L. Water quality assessment and apportionment of pollution sources using APCS-MLR and PMF receptor modeling techniques in three major rivers of South Florida. Sci. Total Environ. 2016, 566, 1552–1567. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Y.; Xia, X.H.; Yang, Z.F. Assessment of water quality in Baiyangdian Lake using multivariate statistical techniques. Procedia Environ. Sci. 2012, 13, 1213–1226. [Google Scholar] [CrossRef]
- Kim, C.; Eom, J.B.; Jung, S.; Ji, T. Detection of organic compounds in water by an optical absorbance method. Sensors 2016, 16, 61. [Google Scholar] [CrossRef] [PubMed]
- Xu, L.; Luo, Y. A new technology for water quality monitoring based on UV-visible spectrum analysis. Spectrosc. Spectr. Anal. 2014, 34, 443–444. [Google Scholar]
- Cao, H.; Qu, W.; Yang, X.; Jia, S.; Wang, C.; Lu, C. Research on rapid determination of organic matter concentration in aquaculture water based on UV-visible spectroscopy. Spectrosc. Spectr. Anal. 2014, 34, 3015–3019. [Google Scholar]
- Kus, M.; Ribbens, S.; Meynen, V.; Cool, P. Microvolume TOC analysis as useful tool in the evaluation of lab scale photocatalytic processes. Catalysts 2013, 3, 74–87. [Google Scholar] [CrossRef]
- Zhao, Y.; Li, Y.; Zhen, Y.; Fang, Y. A novel monitoring system for COD using optical ultraviolet absorption method. Procedia Environ. Sci. 2011, 10, 2348–2353. [Google Scholar]
- Tang, B.; Zhao, J.; Wei, B.; Jiang, S.; Luo, J. A method of optimizing the prediction model for the determination of water COD by using UV-visible spectroscopy. China Environ. Sci. 2015, 35, 478–483. [Google Scholar]
- Tang, B.; Wei, B.; Wu, D.; Mi, D.; Zhao, J.; Feng, P.; Jiang, S.; Mao, B. Experimental research of turbidity influence on water quality monitoring of COD in UV-visible spectroscopy. Spectrosc. Spectr. Anal. 2014, 34, 3020–3024. [Google Scholar]
- Wu, D.; Wei, B.; Feng, P.; Tang, B.; Liu, J. Denoising algorithm of UV-visible spectroscopy on water quality detection based on two-dimension restructuring and dynamic pane. Spectrosc. Spectr. Anal. 2016, 36, 1044–1050. [Google Scholar]
- Tang, B.; Wei, B.; Mao, B.; Zhao, J.; Feng, P. Noise analysis and denoising research on the UV-visible absorption spectroscopy water quality detection system. Laser Optoelectron. Prog. 2014, 51, 197–203. [Google Scholar] [CrossRef]
- Tang, G.; Wei, B.; Wu, D.; Feng, P.; He, P.; Liu, J.; Chen, M. Research on compression and reconstruction algorithm of spectral data in water quality monitoring. Environ. Sci. Technol. 2016, 39, 6–10. [Google Scholar]
- Wang, X.; Ma, J.; Wang, S.; Bi, D. Cluster-based dynamic energy management for collaborative target tracking in wireless sensor networks. Sensors 2007, 7, 1193–1215. [Google Scholar] [CrossRef]
- Wang, X.; Ma, J.; Wang, S. Parallel energy-efficient coverage optimization with maximum entropy clustering in wireless sensor networks. J. Parallel Distrib. Comput. 2009, 69, 838–847. [Google Scholar] [CrossRef]
- Ma, J.; Wang, Y.; Yang, Q.; Liu, Y.; Shi, P. Intelligent simultaneous quantitative online analysis of environmental trace heavy metals with total-reflection X-ray fluorescence. Sensors 2015, 15, 10650–10675. [Google Scholar] [CrossRef] [PubMed]
- Hou, D.; Zhang, J.; Chen, L.; Huang, P.; Zhang, G. Water quality analysis by UV-visible spectroscopy: A review of methodology and application. Spectrosc. Spectr. Anal. 2013, 33, 1839–1844. [Google Scholar]
- Zhao, Y.; Li, Y.; Guo, Y.; Gu, B.; Yang, Z. A novel technology for water quality testing based on UV spectral analysis. Spectrosc. Spectr. Anal. 2012, 32, 1301–1305. [Google Scholar]
- Liu, X.; Zhang, H. Rapid determination of COD in aquaculture water based on LSSVM with UV-visible spectroscopy. Spectrosc. Spectr. Anal. 2014, 34, 2804–2807. [Google Scholar]
- Wang, X.; Wang, S.; Ma, J. An improved particle filter for target tracking in sensor systems. Sensors 2007, 7, 144–156. [Google Scholar] [CrossRef]
- Wang, X.; Ma, J.; Ding, L.; Bi, D. Robust forecasting for energy efficiency of wireless multimedia sensor networks. Sensors 2007, 7, 2779–2807. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.; Ma, J.; Wang, S.; Bi, D. Time series forecasting energy-efficient organization of wireless sensor networks. Sensors 2007, 7, 1766–1792. [Google Scholar] [CrossRef] [PubMed]
- Taormina, R.; Chau, K.W.; Sivakumar, B. Neural network river forecasting through baseflow separation and binary-coded swarm optimization. J. Hydrol. 2015, 529, 1788–1797. [Google Scholar] [CrossRef]
- Gholami, V.; Chau, K.W.; Fadaee, F.; Torkaman, J.; Ghaffari, A. Modeling of groundwater level fluctuations using dendrochronology in alluvial aquifers. J. Hydrol. 2015, 529, 1060–1069. [Google Scholar] [CrossRef]
- Wang, W.C.; Xu, D.M.; Chau, K.W.; Chen, S. Improved annual rainfall-runoff forecasting using PSO–SVM model based on EEMD. J. Hydroinform. 2013, 15, 1377–1390. [Google Scholar] [CrossRef]
- Zhang, S.; Chau, K.W. Dimension reduction using semi-supervised locally linear embedding for plant leaf classification. In Emerging Intelligent Computing Technology and Applications; Springer: Berlin/Heidelberg, Germany, 2009; pp. 948–955. [Google Scholar]
- Wu, C.L.; Chau, K.W.; Fan, C. Prediction of rainfall time series using modular artificial neural networks coupled with data-preprocessing techniques. J. Hydrol. 2010, 389, 146–167. [Google Scholar] [CrossRef]
- Chau, K.W.; Wu, C.L. A hybrid model coupled with singular spectrum analysis for daily rainfall prediction. J. Hydroinform. 2010, 12, 458–473. [Google Scholar] [CrossRef]
- Ma, J.; Wang, Y.; Yang, Q.; Liu, Y.; Shi, P. Intelligent simultaneous quantification of environmental trace elements with total reflection X-ray fluorescence. In Proceedings of the IEEE 15th International Conference on Environment and Electrical Engineering, Rome, Italy, 10–13 June 2015; pp. 1580–1586. [Google Scholar]
- Wang, X.; Ma, J.; Wang, S.; Bi, D. Distributed particle swarm optimization and simulated annealing for energy-efficient coverage in wireless sensor networks. Sensors 2007, 7, 628–648. [Google Scholar] [CrossRef]
- Wang, X.; Ma, J.; Wang, S. Distributed energy optimization for target tracking in wireless sensor networks. IEEE Trans. Mobile Comput. 2009, 9, 73–86. [Google Scholar] [CrossRef]
- Wang, C.; Wu, F.; Zhao, H.; Lu, S. Temporal information entropy and its application in the detection of spatio-temporal changes in vegetation coverage based on remote sensing images. Acta Ecol. Sin. 2017, 37, 7359–7367. [Google Scholar]
- Al-Omari, A.I. Estimation of entropy using random sampling. J. Comput. Appl. Math. 2014, 261, 95–102. [Google Scholar] [CrossRef]
- Yentes, J.M.; Hunt, N.; Schmid, K.K. The appropriate use of approximate entropy and sample entropy with short data sets. Ann. Biomed. Eng. 2013, 41, 349–365. [Google Scholar] [CrossRef] [PubMed]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sample No. | Parameter | Concentration | Dual-PSO | LSSVM | ||||
|---|---|---|---|---|---|---|---|---|
| OP | RE | RSD | OP | RE | RSD | |||
| 1 | TOC | 8 mg/L | 20 mm | −4.23% | 1.03% | 10 mm | −6.97% | 2.36% |
| NO3-N | 4 mg/L | 4.85% | 1.49% | 6.13% | 3.10% | |||
| Turbidity | 10 NTU | 3.06% | 2.05% | 5.50% | 3.89% | |||
| 2 | TOC | 16 mg/L | 10 mm | −3.52% | 1.12% | −4.16% | 1.25% | |
| NO3-N | 8 mg/L | 4.59% | 1.47% | 5.73% | 1.62% | |||
| Turbidity | 20 NTU | 2.70% | 2.08% | 2.82% | 2.19% | |||
| 3 | TOC | 32 mg/L | 5 mm | −7.36% | 1.26% | −12.55% | 2.85% | |
| NO3-N | 16 mg/L | 5.02% | 1.51% | 15.13% | 2.93% | |||
| Turbidity | 40 NTU | 3.92% | 2.16% | 6.12% | 3.67% | |||
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, J.; Meng, F.; Zhou, Y.; Wang, Y.; Shi, P. Distributed Water Pollution Source Localization with Mobile UV-Visible Spectrometer Probes in Wireless Sensor Networks. Sensors 2018, 18, 606. https://doi.org/10.3390/s18020606
Ma J, Meng F, Zhou Y, Wang Y, Shi P. Distributed Water Pollution Source Localization with Mobile UV-Visible Spectrometer Probes in Wireless Sensor Networks. Sensors. 2018; 18(2):606. https://doi.org/10.3390/s18020606
Chicago/Turabian StyleMa, Junjie, Fansheng Meng, Yuexi Zhou, Yeyao Wang, and Ping Shi. 2018. "Distributed Water Pollution Source Localization with Mobile UV-Visible Spectrometer Probes in Wireless Sensor Networks" Sensors 18, no. 2: 606. https://doi.org/10.3390/s18020606
APA StyleMa, J., Meng, F., Zhou, Y., Wang, Y., & Shi, P. (2018). Distributed Water Pollution Source Localization with Mobile UV-Visible Spectrometer Probes in Wireless Sensor Networks. Sensors, 18(2), 606. https://doi.org/10.3390/s18020606