Interaction Multipath in Through-the-Wall Radar Imaging Based on Compressive Sensing


{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
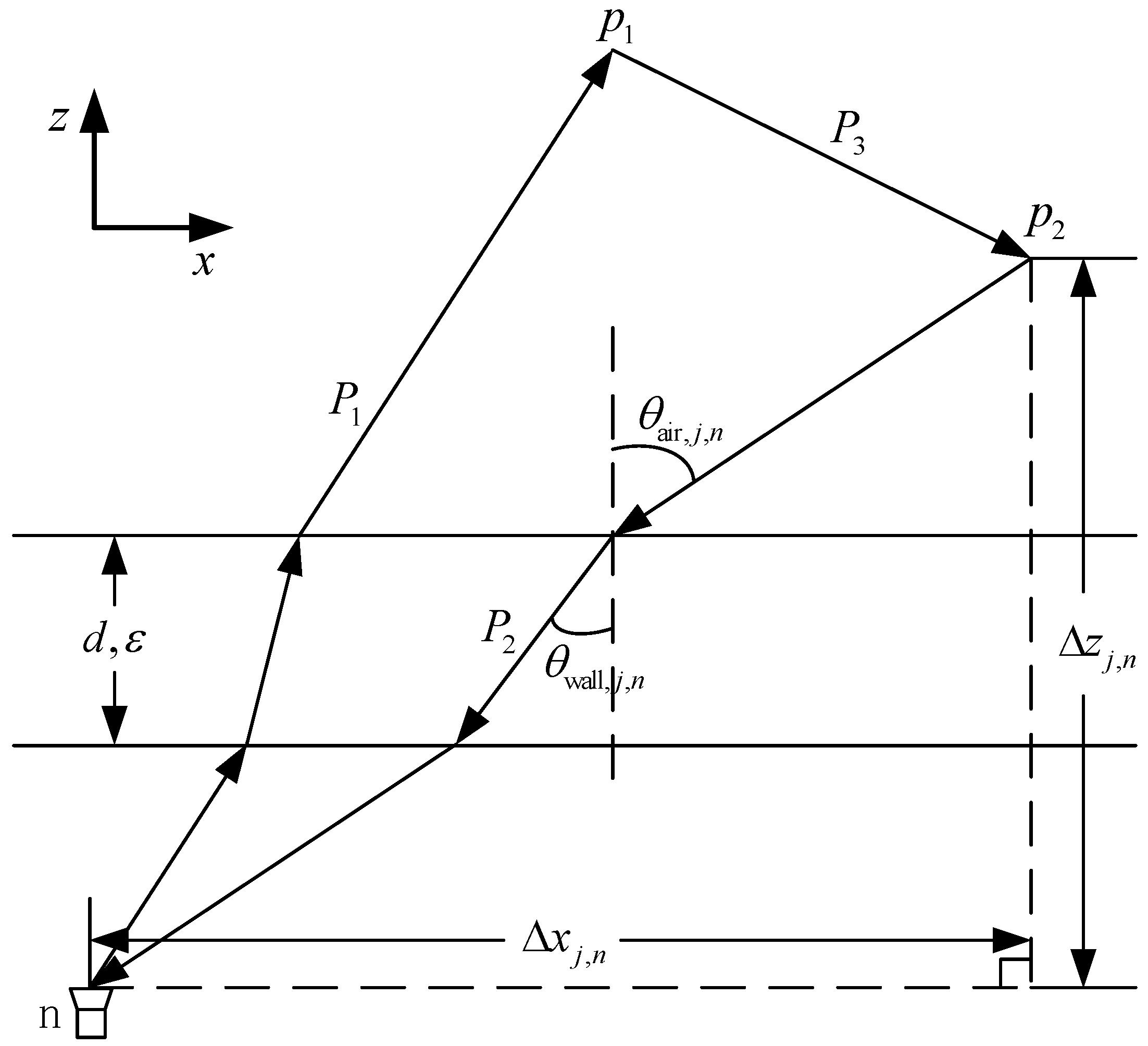
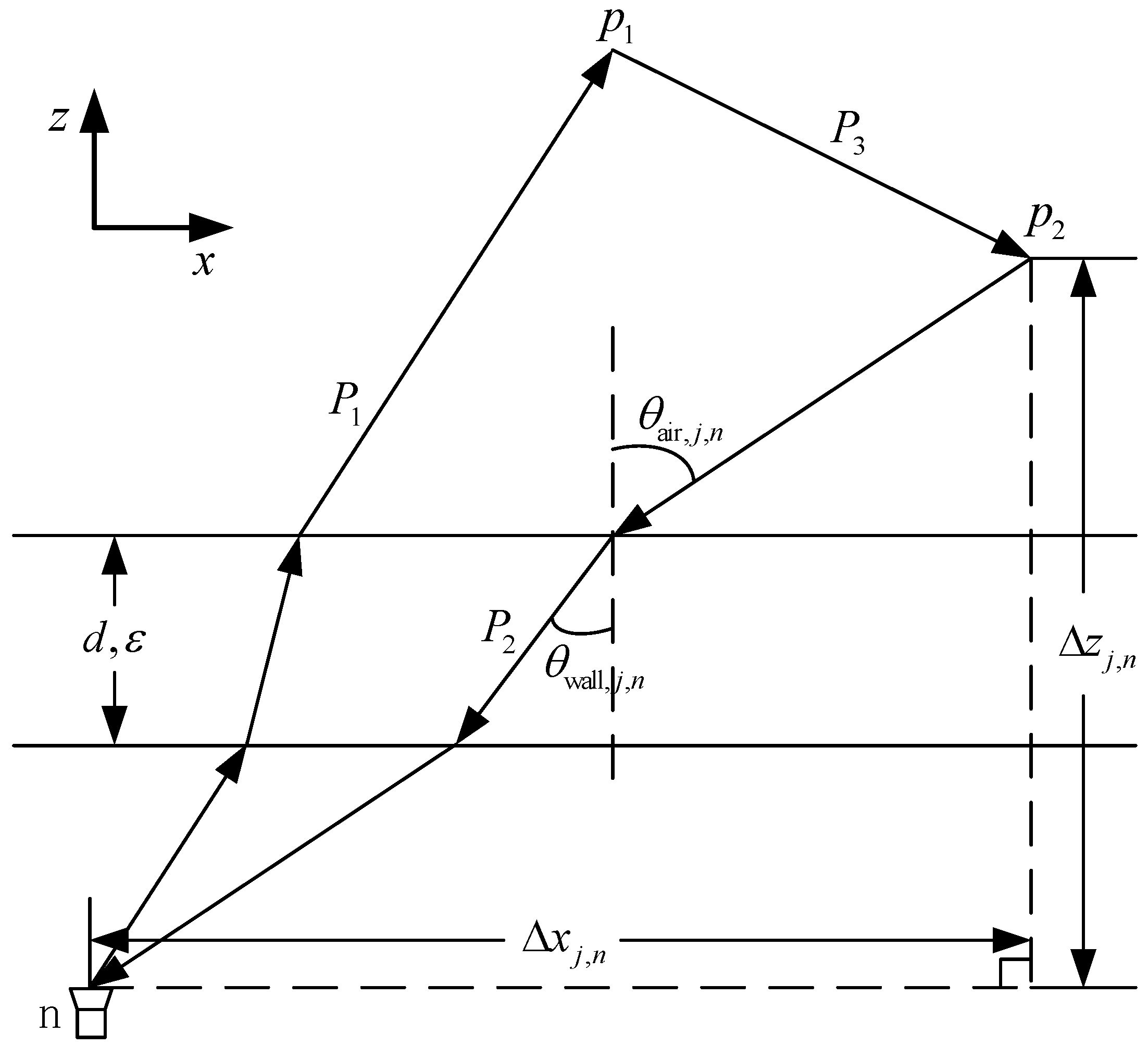
2. Theory of Interaction Multipath in TWRI
3. Method of Interaction CS
4. Simulation Results
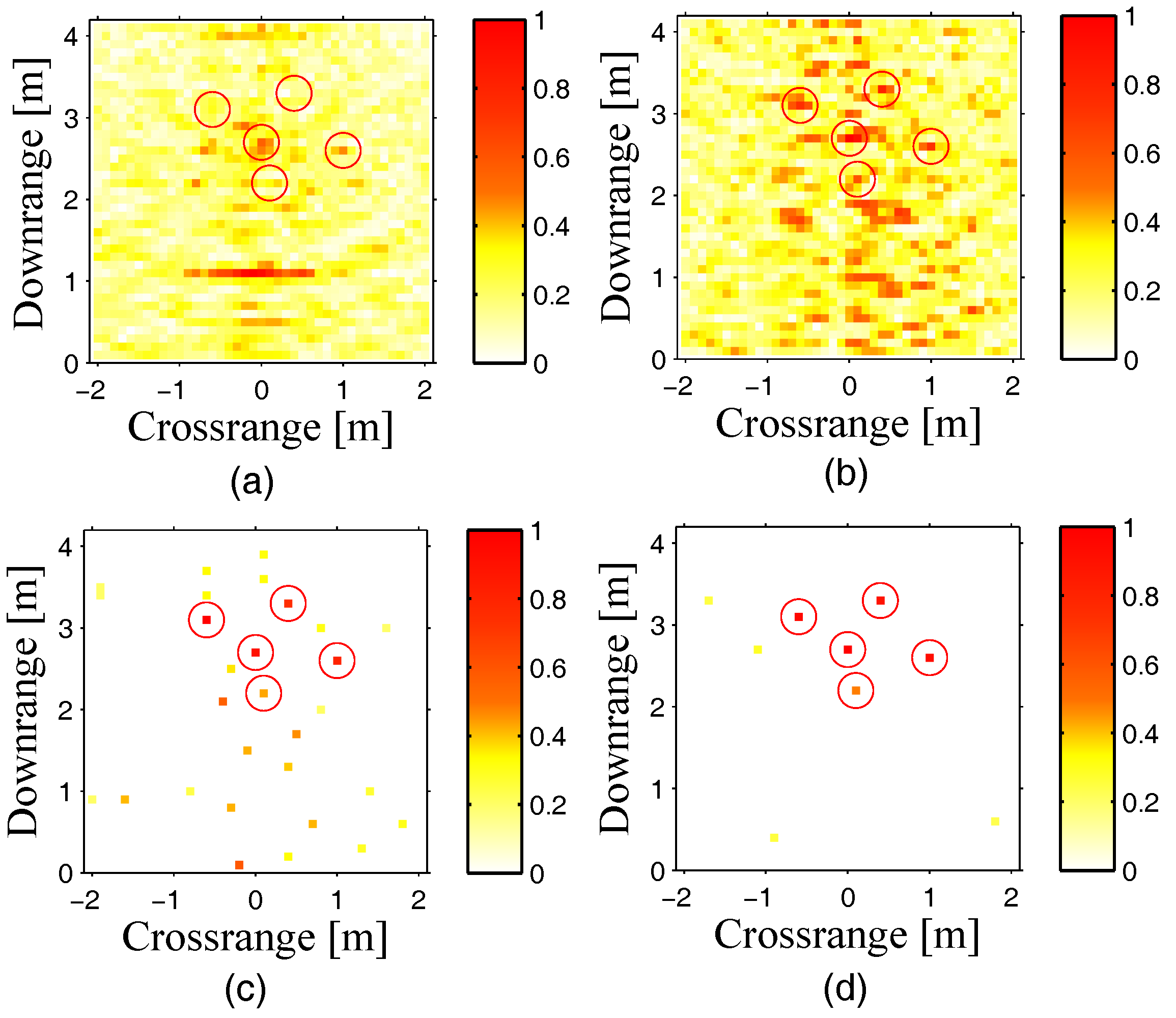
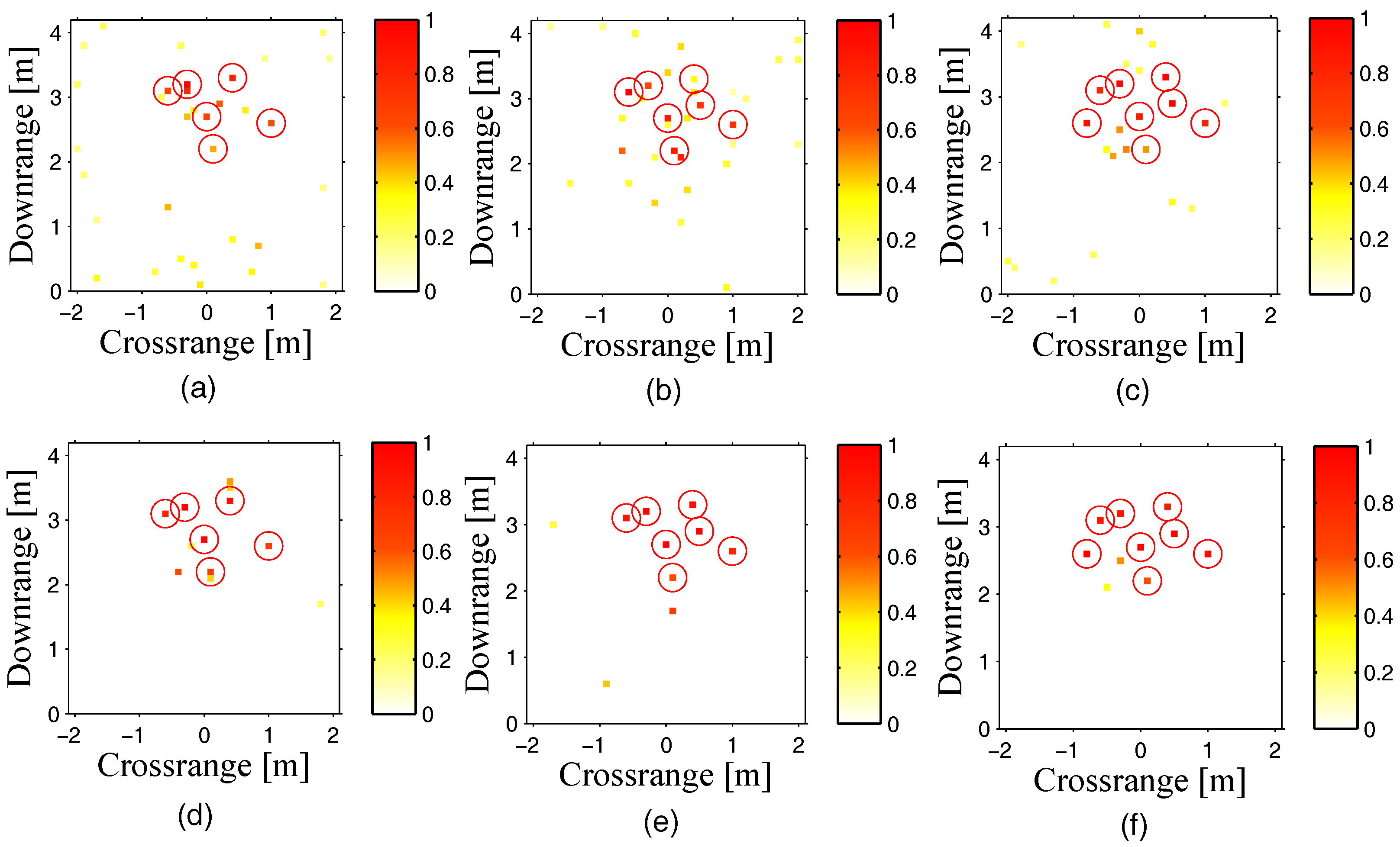
4.1. Comparison of Targets’ Reconstruction by Existing Methods and Interaction CS
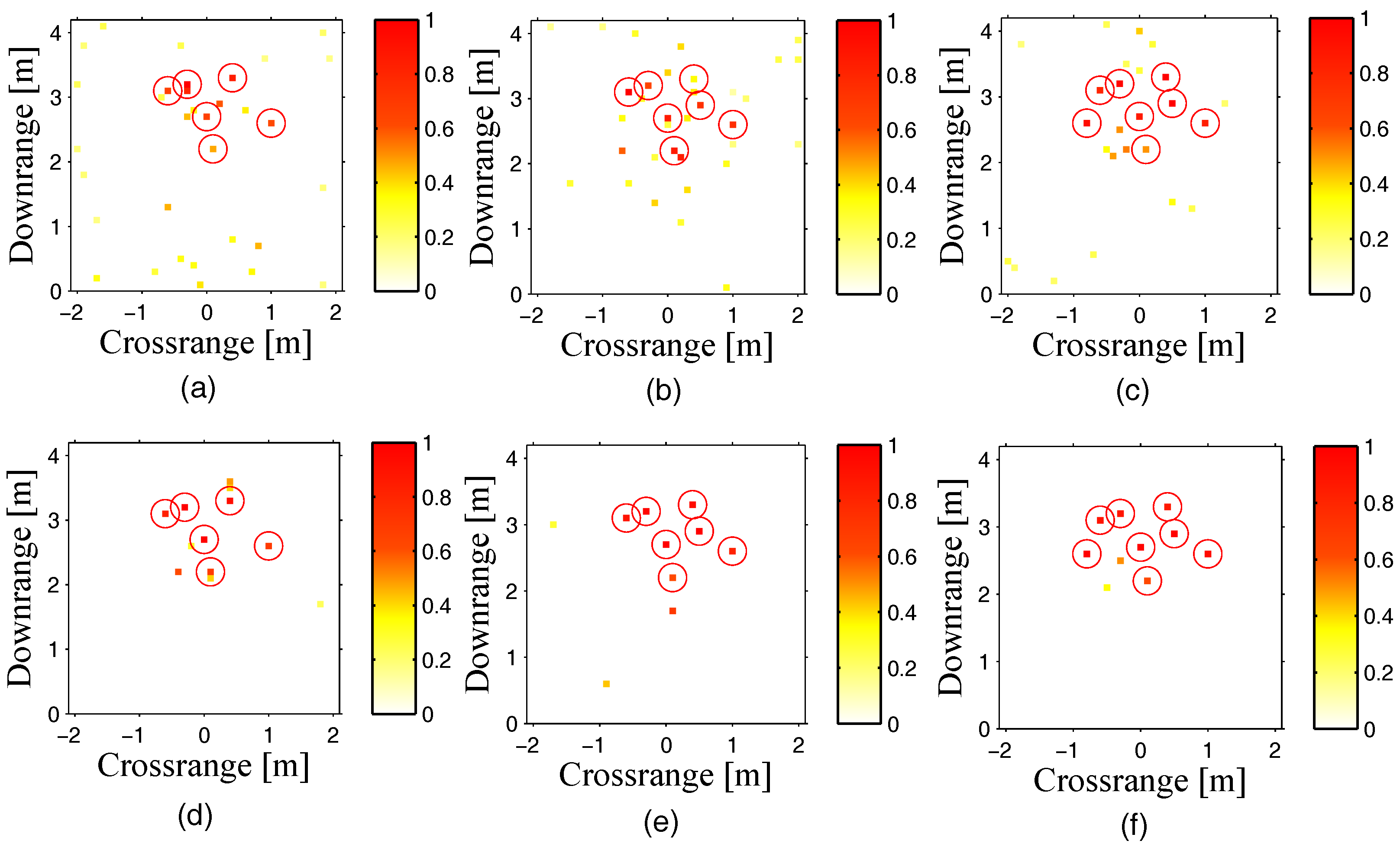
4.2. Comparison of Targets’ Reconstruction by Increasing the Number of Targets
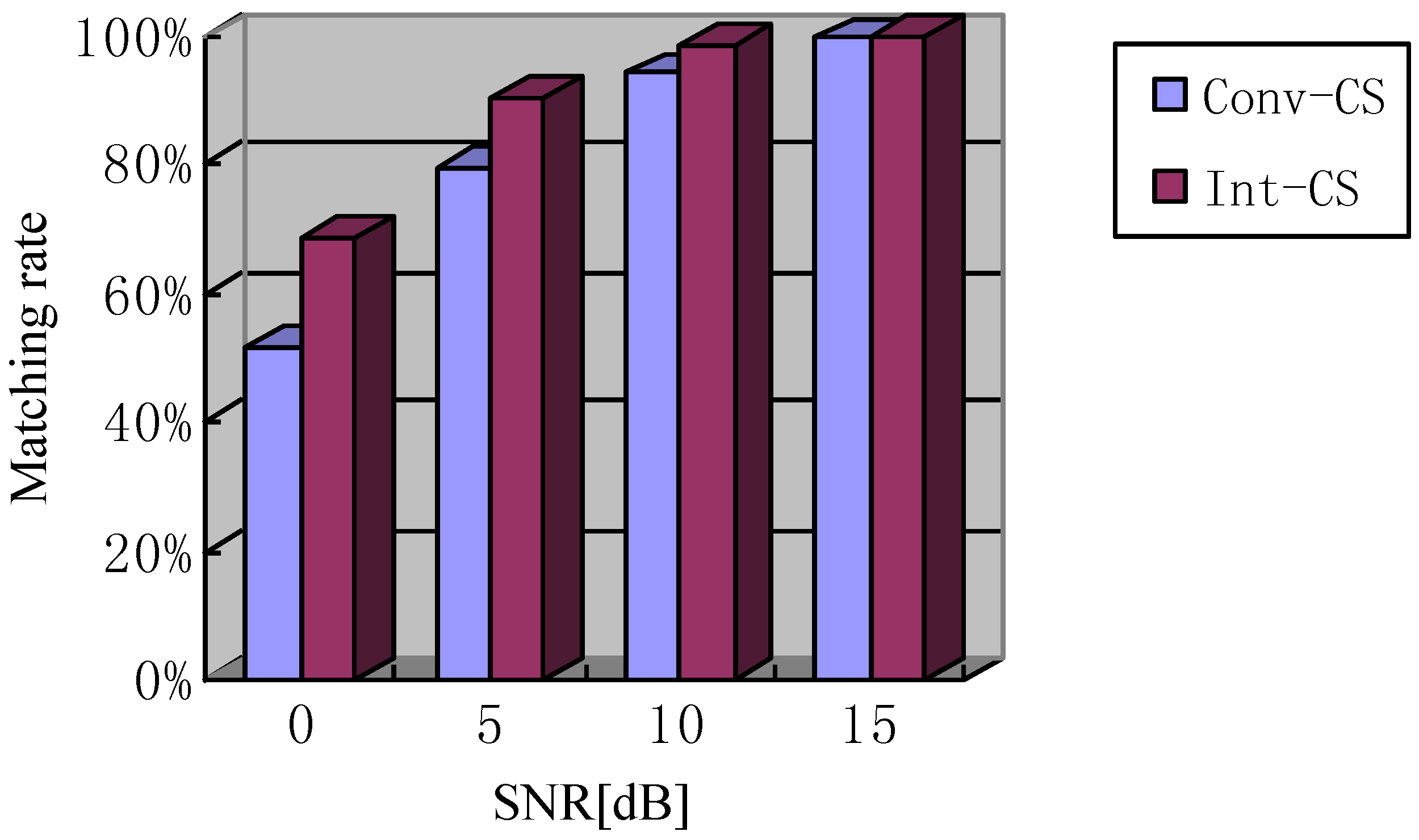
4.3. Comparison of Matching Rates in Different Conditions of SNR
5. Conclusions
Author Contributions
Conflicts of Interest
References
- Ahmad, F.; Amin, M. Multi-location wideband synthetic aperture imaging for urban sensing applications. J. Frankl. Inst. 2008, 345, 618–639. [Google Scholar] [CrossRef]
- Baranoski, E. Through-wall imaging: Historical perspective and future directions. J. Frankl. Inst. 2008, 345, 556–569. [Google Scholar] [CrossRef]
- Yoon, Y.-S.; Amin, M.G. High-resolution through-the-wall radar imaging using beamspace MUSIC. IEEE Trans. Antennas Propag. 2008, 56, 1763–1774. [Google Scholar] [CrossRef]
- Amin, M. Through-the-Wall Radar Imaging; CRC Press: Boca Raton, FL, USA, 2011. [Google Scholar]
- Tang, V.H. A Sparse Bayesian Learning Approach for Through-Wall Radar Imaging of Stationary Targets. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 2485–2501. [Google Scholar] [CrossRef]
- Zhang, H.; Li, D.; Zhao, J. Time-Delay and Amplitude Modified BP Imaging Algorithm of Multiple Targets for UWB Through-the-Wall Radar Imaging. J. Inf. Process. Syst. 2017, 13, 677–688. [Google Scholar] [CrossRef]
- Zhang, W.; Amin, M.; Ahmad, F. Ultrawideband Impulse Radar Through-the-Wall Imaging with Compressive Sensing. Int. J. Antennas Propag. 2012, 2012. [Google Scholar] [CrossRef]
- Narayanan, R.M.; Gebhardt, E.T. Through-Wall Single and Multiple Target Imaging Using MIMO Radar. Electronics 2017, 6, 70. [Google Scholar] [CrossRef]
- Li, Y.C.; Oh, D.; Kim, S. Dual Channel S-Band Frequency Modulated Continuous Wave Through-Wall Radar Imaging. Sensors 2018, 18, 1. [Google Scholar] [CrossRef] [PubMed]
- Tang, V.H. Multipolarization Through-Wall Radar Imaging Using Low-Rank and Jointly-Sparse Representations. IEEE Trans. Image Process. 2018, 27, 1763–1776. [Google Scholar] [CrossRef] [PubMed]
- Yoon, Y.S.; Amin, M.G.; Bouzerdoum, A. Spatial Filtering for Wall-Clutter Mitigation in Through-the-Wall Radar Imaging. IEEE Trans. Geosci. Remote Sens. 2009, 47, 3192–3208. [Google Scholar] [CrossRef]
- Tivive, F.H.C.; Amin, M.G.; Bouzerdoum, A. Wall clutter mitigation based on eigen-analysis in through-the-wall radar imaging. In Proceedings of the 17th International Conference on Digital Signal Processing, Corfu, Greece, 6–8 July 2011; pp. 1–8. [Google Scholar]
- Dehmollaian, M.; Sarabandi, K. Refocusing Through Building Walls Using Synthetic Aperture Radar. IEEE Trans. Geosci. Remote Sens. 2008, 46, 1589–1599. [Google Scholar] [CrossRef]
- TTivive, F.H.C.; Bouzerdoum, A.; Amin, M.G. An SVD-based approach for mitigating wall reflections in through-the-wall radar imaging. In Proceedings of the 2011 IEEE Radar Conference, Kansas City, MO, USA, 23–27 May 2011; pp. 519–524. [Google Scholar]
- Gennarelli, G. Radar Imaging Through a Building Corner. IEEE Trans. Geosci. Remote Sens. 2014, 52, 6750–6761. [Google Scholar] [CrossRef]
- Gennarelli, G.; Soldovieri, F. Radar Imaging Through Cinderblock Walls: Achievable Performance by a Model-Corrected Linear Inverse Scattering Approach. IEEE Trans. Geosci. Remote Sens. 2014, 52, 6738–6749. [Google Scholar] [CrossRef]
- Yoon, Y.S.; Amin, M. Compressed sensing technique for high-resolution radar Imaging. In Proceedings of the SPIE Signal Processing, Sensor Fusion, and Target Recognition XVII, Orlando, FL, USA, 17 April 2008; Volume 6968. [Google Scholar]
- Ahmad, F.; Amin, M. Through-the-wall human motion indication using sparsity-driven change detection. IEEE Trans. Geosci. Remote Sens. 2013, 51, 881–890. [Google Scholar] [CrossRef]
- Leigsnering, M.; Debes, C.; Zoubir, A. Compressive sensing in through-the-wall radar imaging. In Proceedings of the 2011 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Prague, Czech Republic, 22–27 May 2011. [Google Scholar]
- Leigsnering, M. Multipath exploitation in through-the-wall radar imaging using sparse reconstruction. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 920–939. [Google Scholar] [CrossRef]
- Gennarelli, G.; Catapano, I.; Soldovieri, F. RF/Microwave Imaging of Sparse Targets in Urban Areas. IEEE Antennas Wirel. Propag. Lett. 2013, 12, 643–646. [Google Scholar] [CrossRef]
- Candes, E.; Wakin, M. An introduction to compressive sampling. IEEE Signal Process. Mag. 2008, 25, 21–30. [Google Scholar] [CrossRef]
- Chen, S.; Donoho, D.; Saunders, M. Atomic decomposition by basis pursuit. SIAM J. Sci. Comput. 1998, 20, 142–149. [Google Scholar] [CrossRef]
- Gurbuz, A.; McClellan, J.; Scott, W. A compressive sensing data acquisition and imaging method for stepped frequency GPRs. IEEE Trans. Signal Process. 2009, 57, 2640–2650. [Google Scholar] [CrossRef]
- Huang, Q.; Qu, L.; Wu, B.; Fang, G. UWB through-wall imaging based on compressive sensing. IEEE Trans. Geosci. Remote Sens. 2010, 48, 1408–1415. [Google Scholar] [CrossRef]
- Candes, E.; Romberg, J. L1-Magic : Recovery of Sparse Signals via Convex Programming. 2005, Volume 14. Available online: http://www.cs.bham.ac.uk/~axk/Sakinah/inspiring_readings/l1magic.pdf (accessed on 11 February 2018).
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, Y.; Hong, H.; Zhu, X. Interaction Multipath in Through-the-Wall Radar Imaging Based on Compressive Sensing. Sensors 2018, 18, 549. https://doi.org/10.3390/s18020549
Ma Y, Hong H, Zhu X. Interaction Multipath in Through-the-Wall Radar Imaging Based on Compressive Sensing. Sensors. 2018; 18(2):549. https://doi.org/10.3390/s18020549
Chicago/Turabian StyleMa, Yigeng, Hong Hong, and Xiaohua Zhu. 2018. "Interaction Multipath in Through-the-Wall Radar Imaging Based on Compressive Sensing" Sensors 18, no. 2: 549. https://doi.org/10.3390/s18020549
APA StyleMa, Y., Hong, H., & Zhu, X. (2018). Interaction Multipath in Through-the-Wall Radar Imaging Based on Compressive Sensing. Sensors, 18(2), 549. https://doi.org/10.3390/s18020549