Acoustic Sensors for Air and Surface Navigation Applications

 ,
, 
 ,
, 
Abstract
1. Introduction
2. Echolocation in Nature
- Bats can lower their call intensity as they approach strong reflective objects to prevent the echo sound pressure level from becoming too large. Bats can exhibit very high-resolution of target detection with time difference discriminations of 10–12 nanoseconds [3,6,7]. The duration of echolocation can vary considerably, with individual clicks being approximately ~50–100 μs long to constant frequency signals which are longer than 30 ms. Table 1 lists various bat species and their call type, based on their diet.
- As seen in the Table 1, the echolocation call can consist of a single frequency or multiple frequencies comprising a harmonic series. The pulse interval of the call also varies with proximity to the target. As bats approach their target, the repetition rate of their calls increases to get faster localisation updates. Also, the pulse interval of the call gives an indication of the maximum range from which bats can detect objects. Gleaning bats can passively listen to prey-generated sounds to localize their prey by interrupting echolocation or drastically reducing call intensity shortly before capturing prey [4].
3. Sound Propagation
3.1. Sound Attenuation in Atmosphere
3.1.1. Geometrical Divergence ()
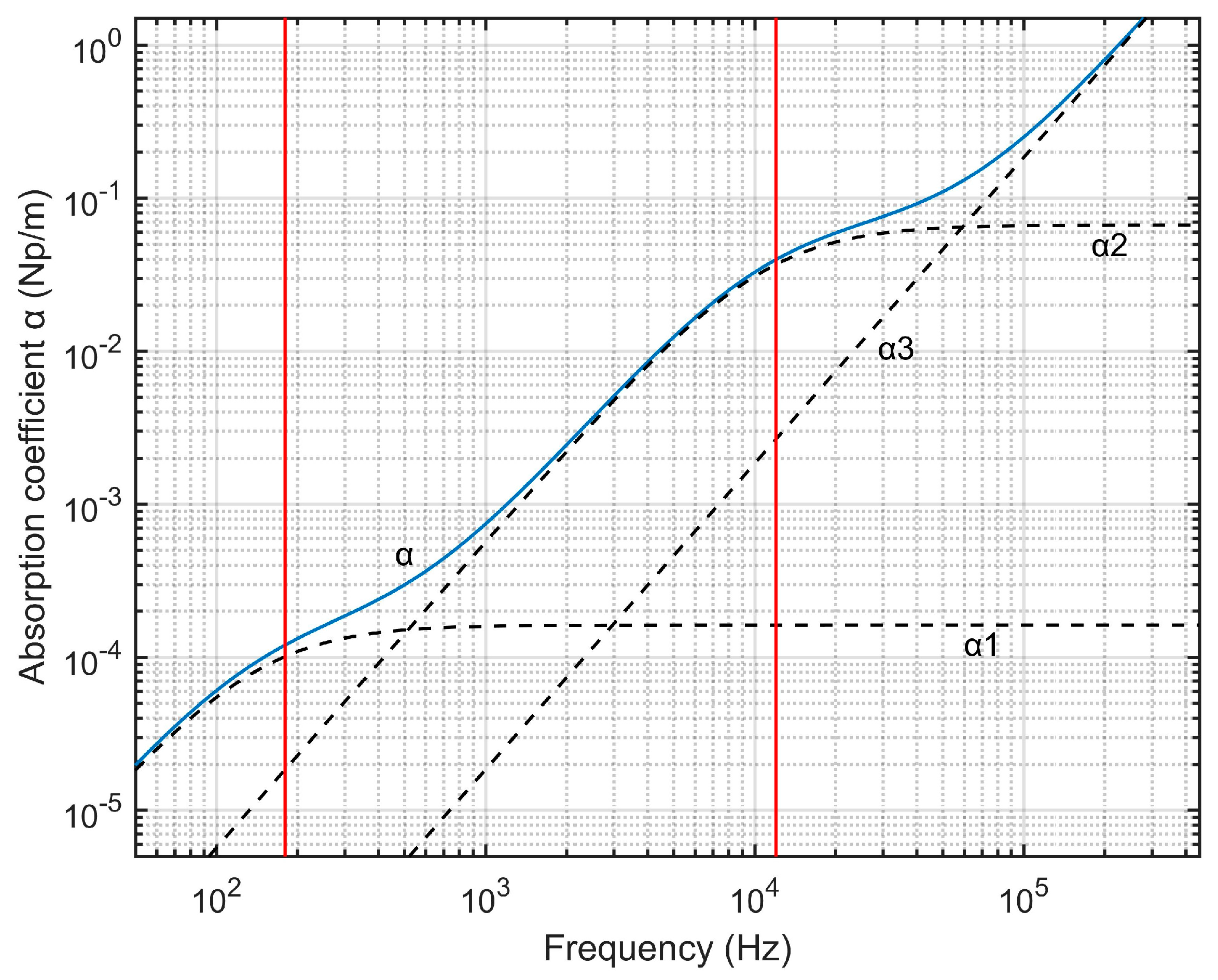
3.1.2. Atmospheric Absorption ()
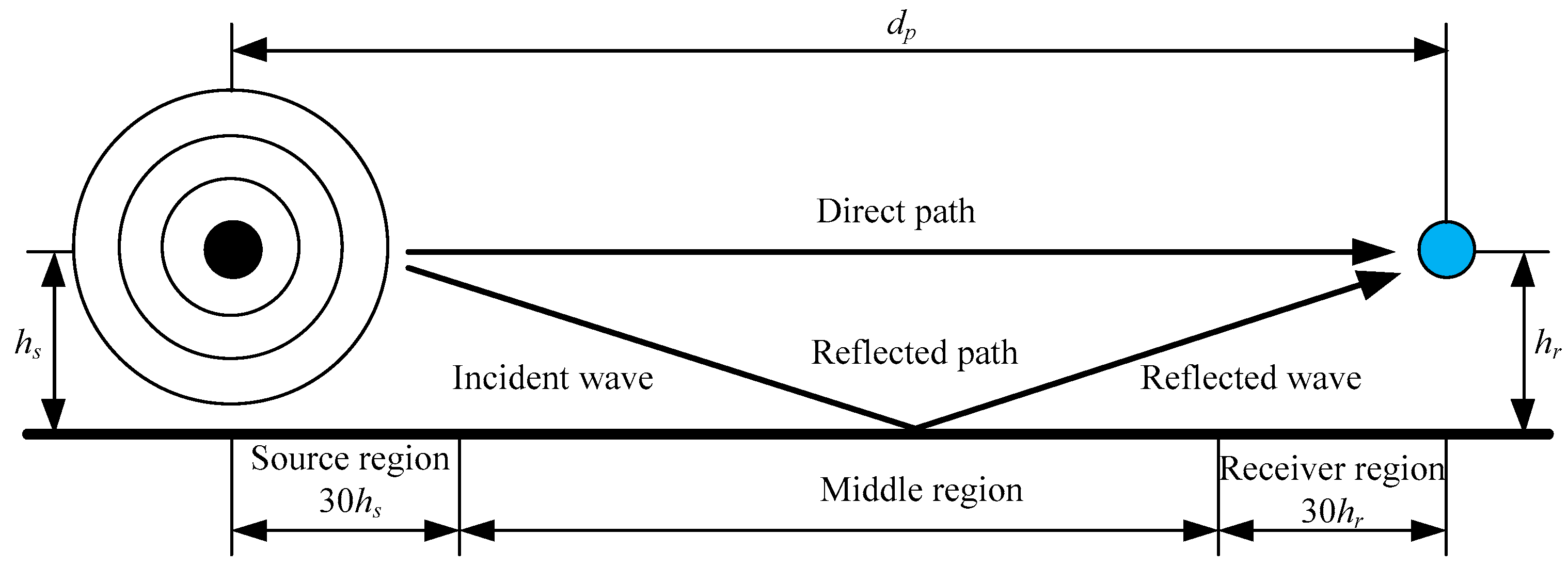
3.1.3. Ground Effect ()
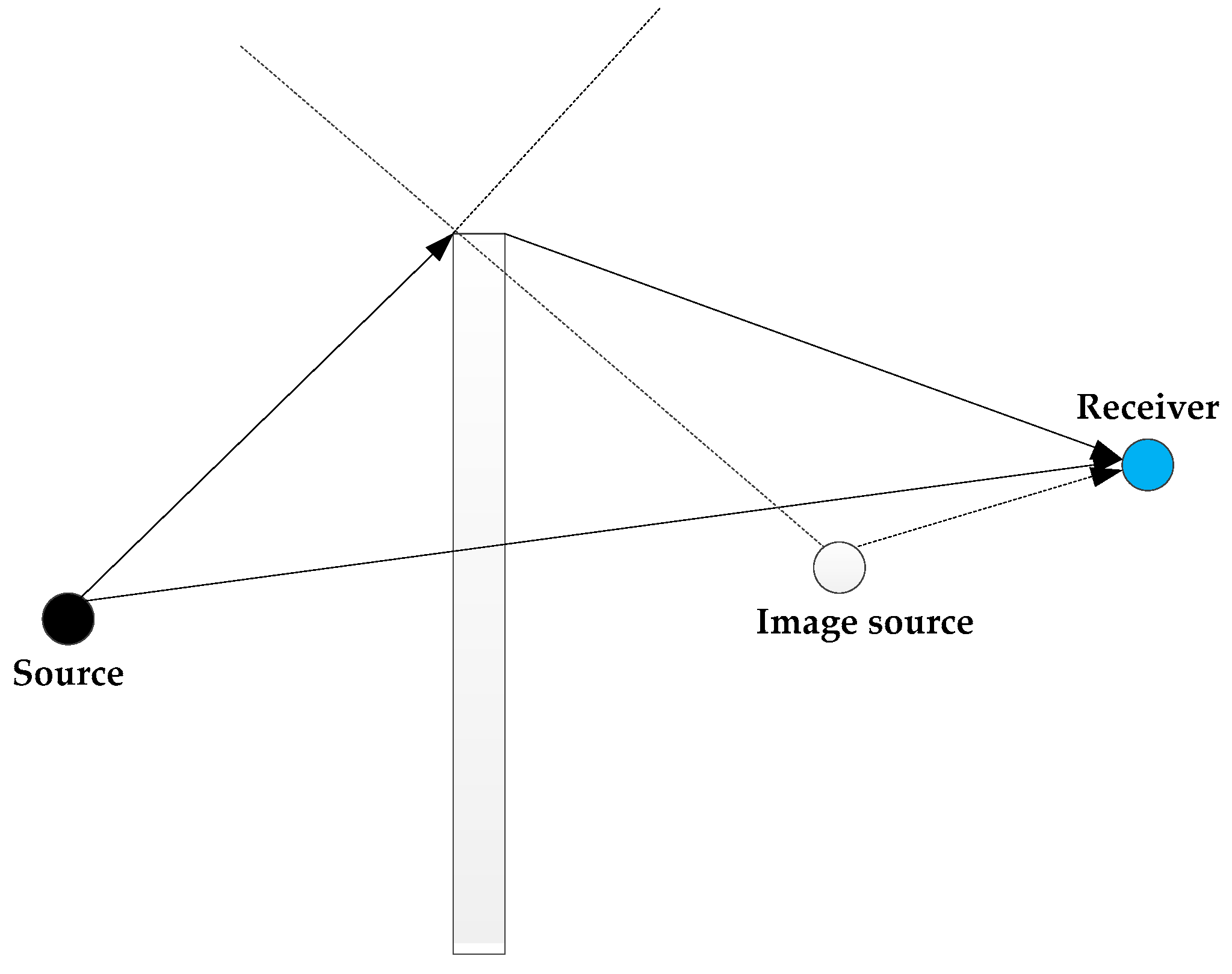
3.1.4. Screening ()
- The object has a surface density of at least 10 kg/m2;
- The surface of the object is closed without cracks or gaps;
- The horizontal dimension of the object normal to the source-receiver line () is larger than the acoustic wavelength at the nominal midband frequency for the octave band of interest, i.e., (Figure 5).
3.1.5. Wind and Temperature Gradient Effects
3.1.6. Other Sound Attenuation Factors
4. Echolocation Errors
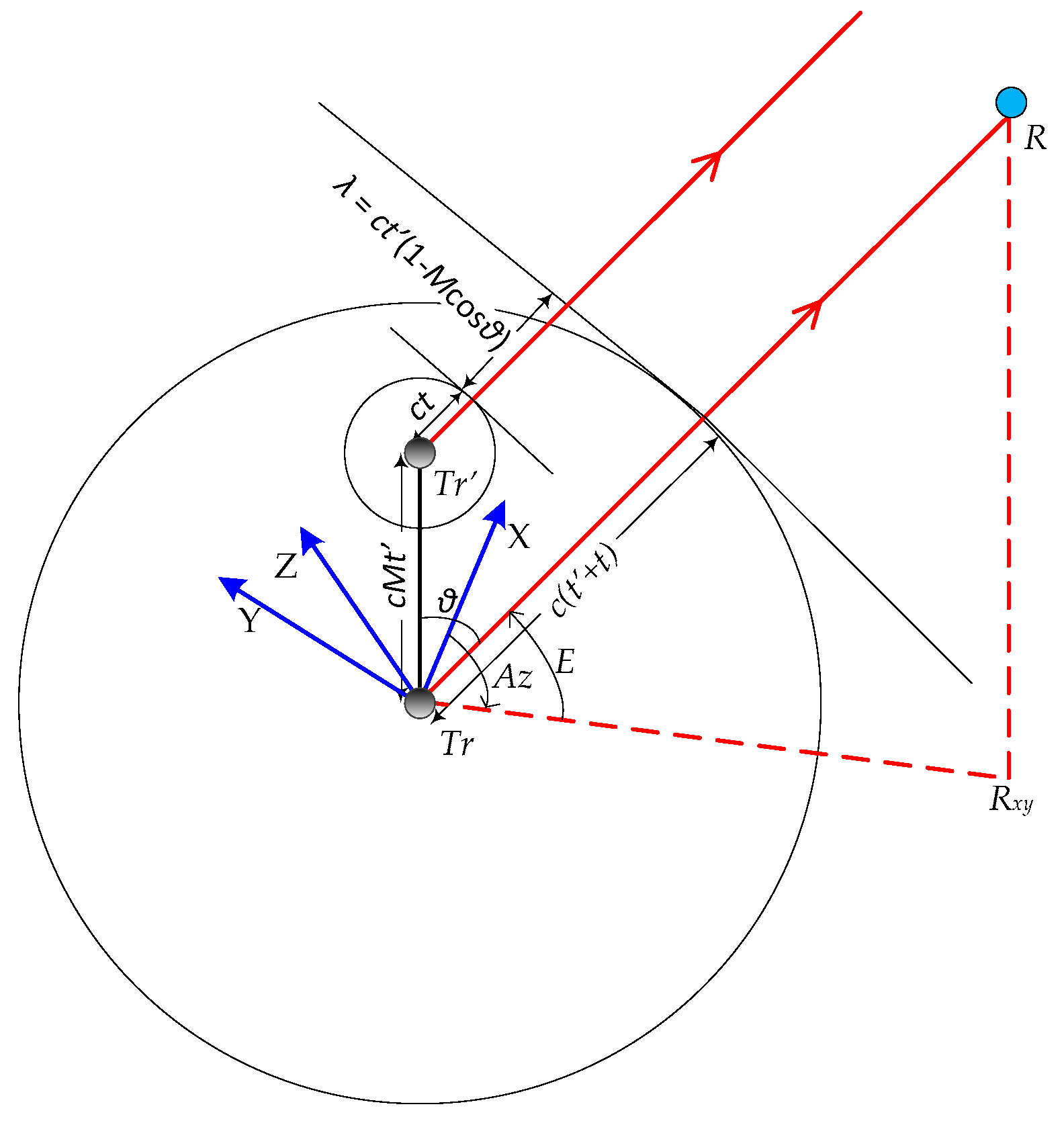
4.1. Doppler Effect
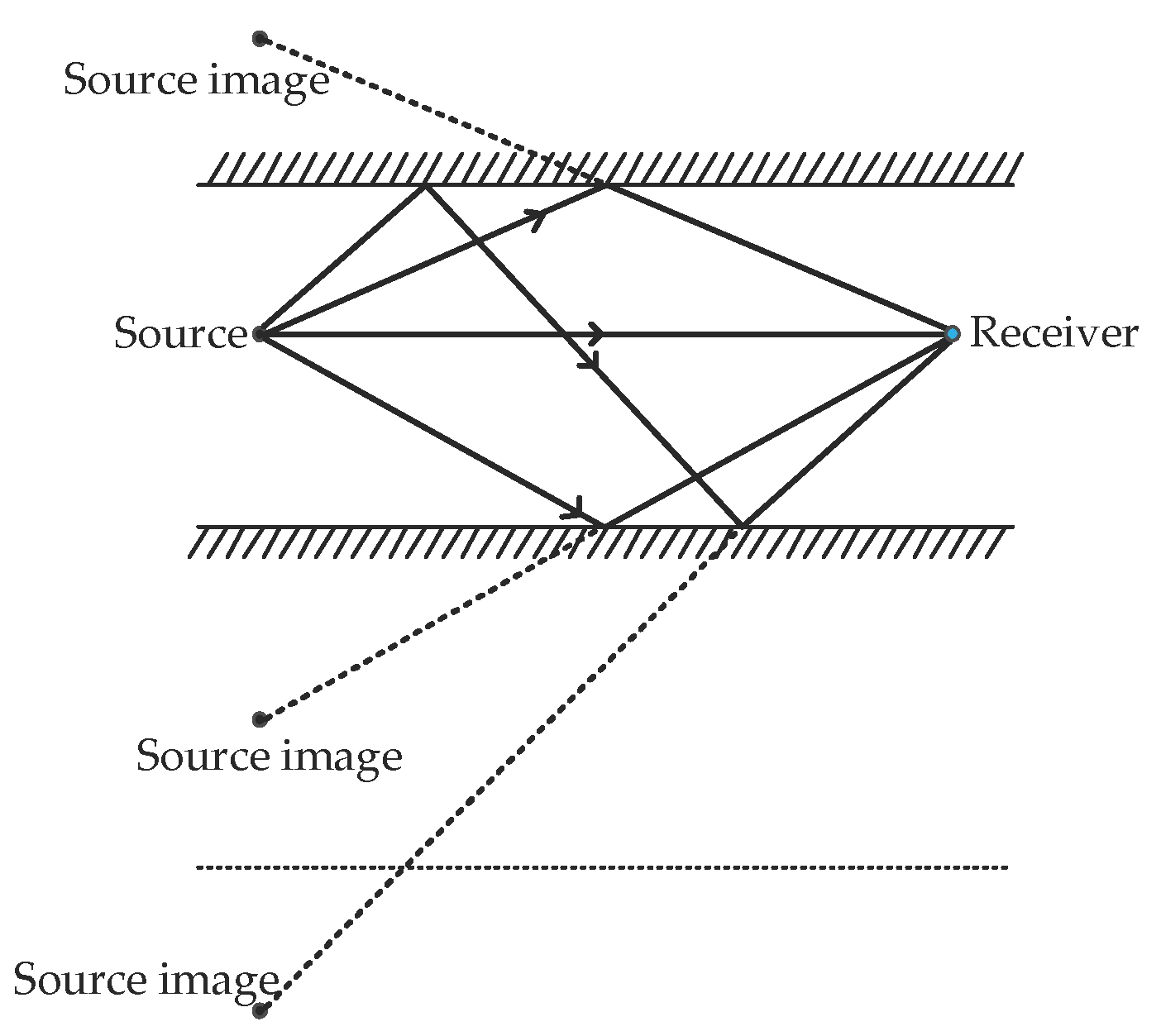
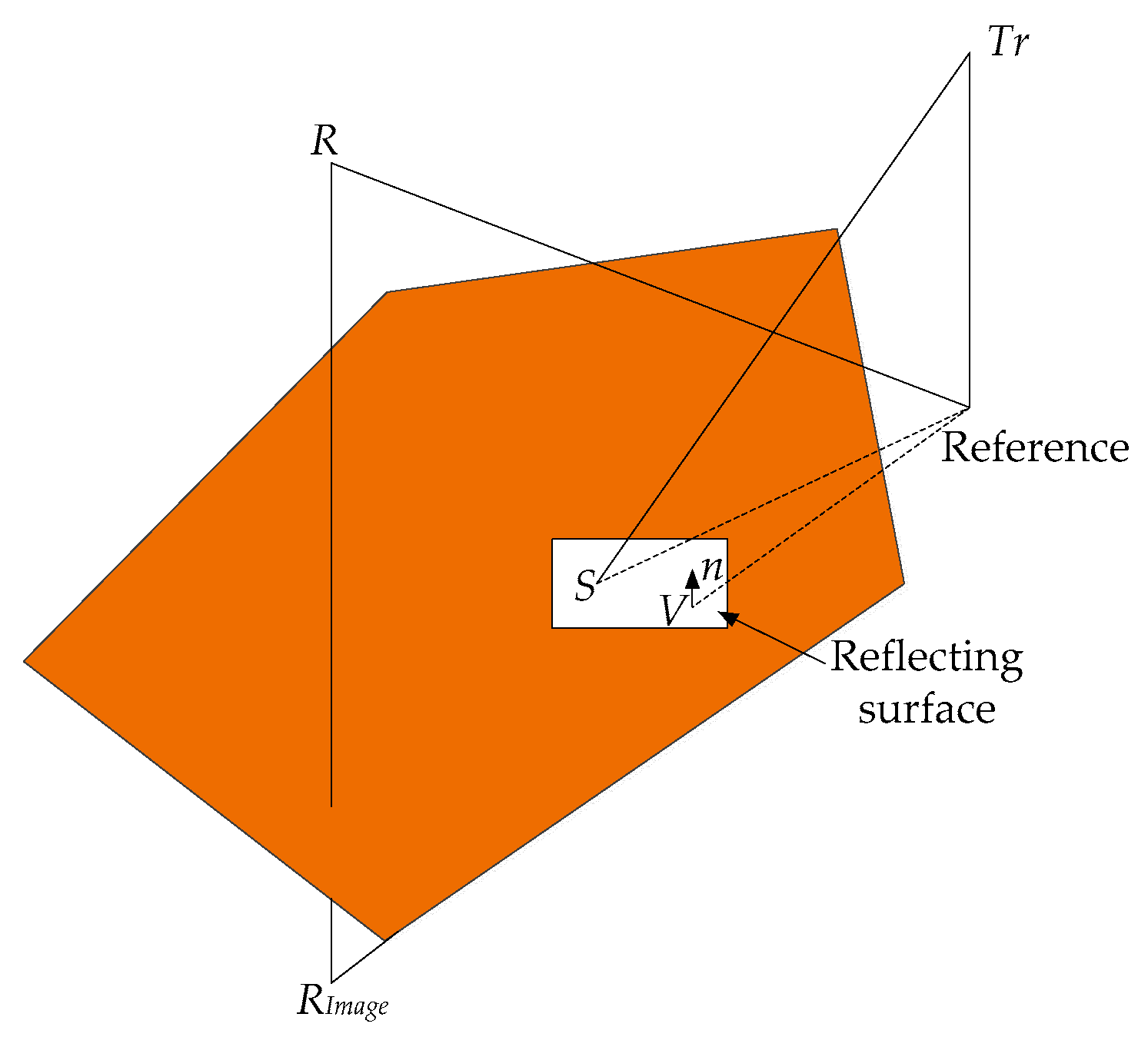
4.2. Multipath
4.3. Atmospheric Effects
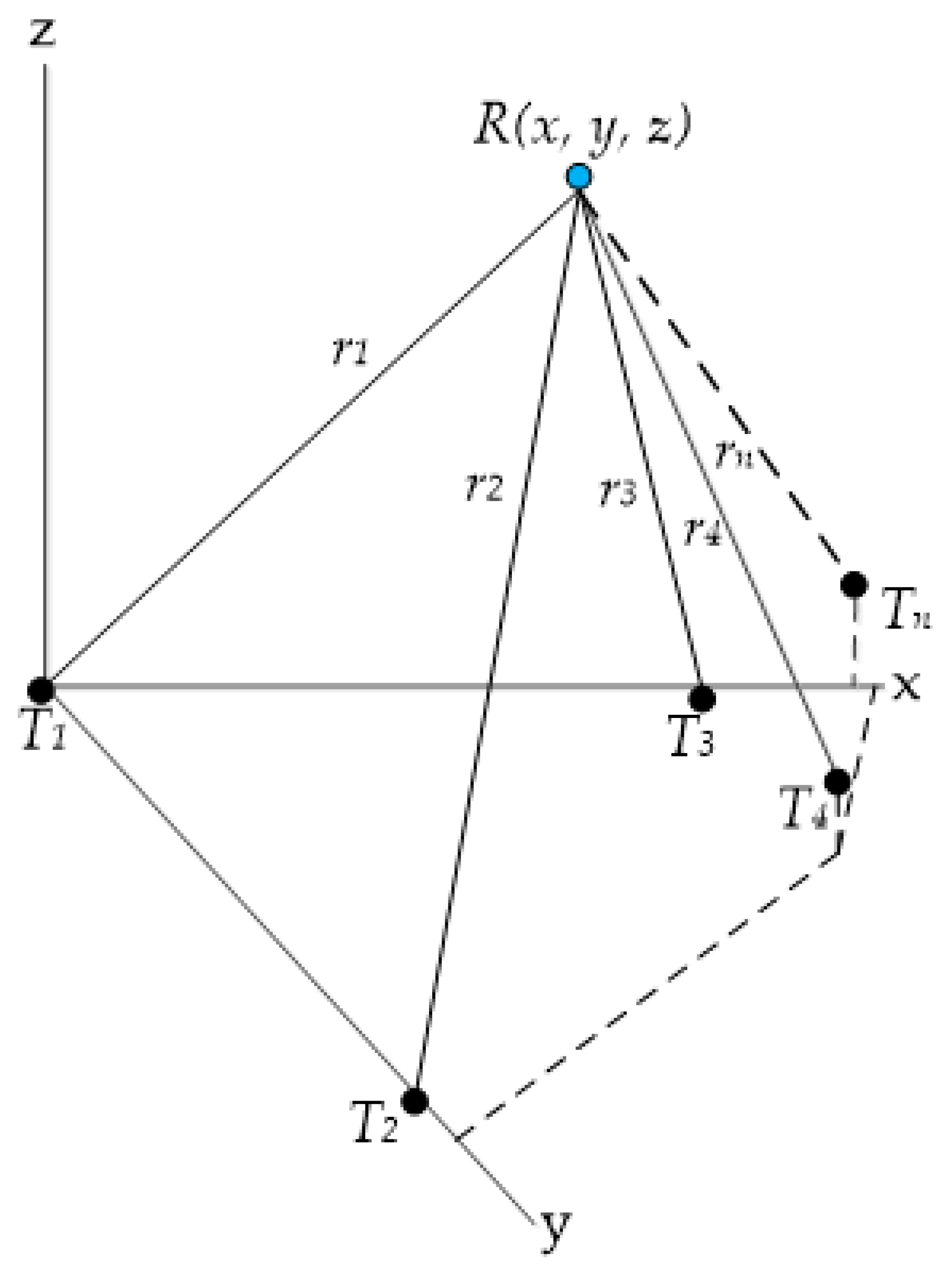
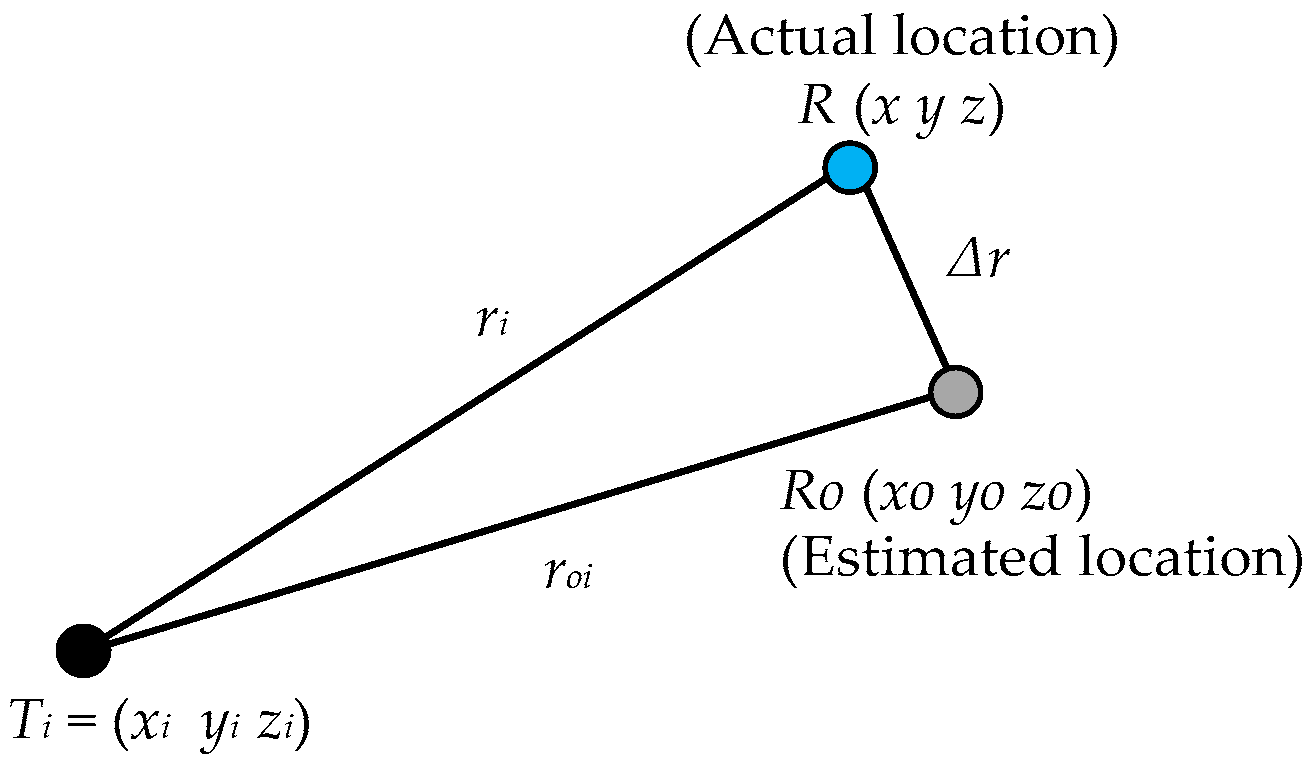
4.4. Ranging Error Analysis
5. Sensor Arrangements
5.1. Monostatic Approach
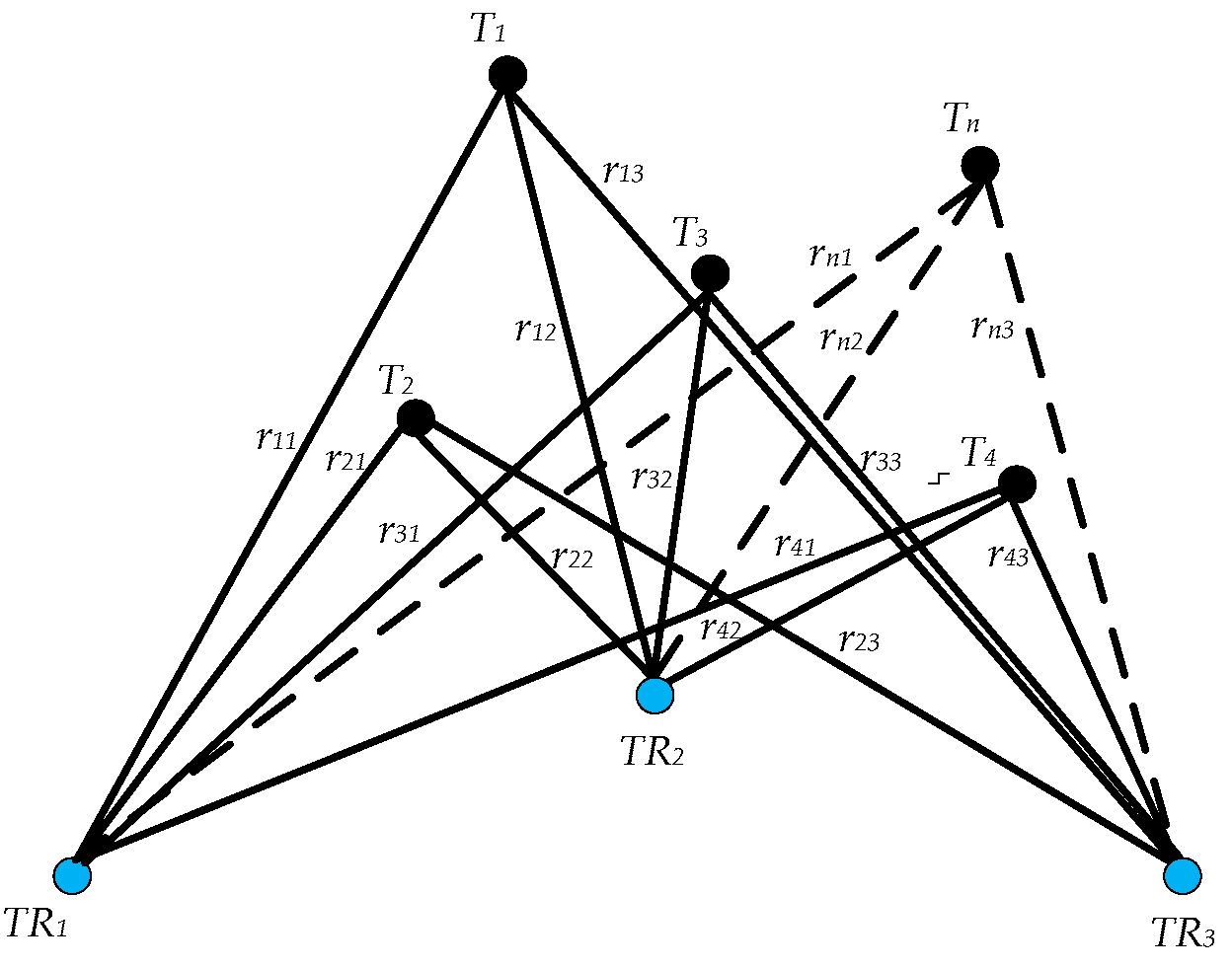
5.2. Multistatic Approach
5.3. Combination of Multistatic and Monostatic Approaches
6. Overview of State-of-the-Art Acoustic Sensors
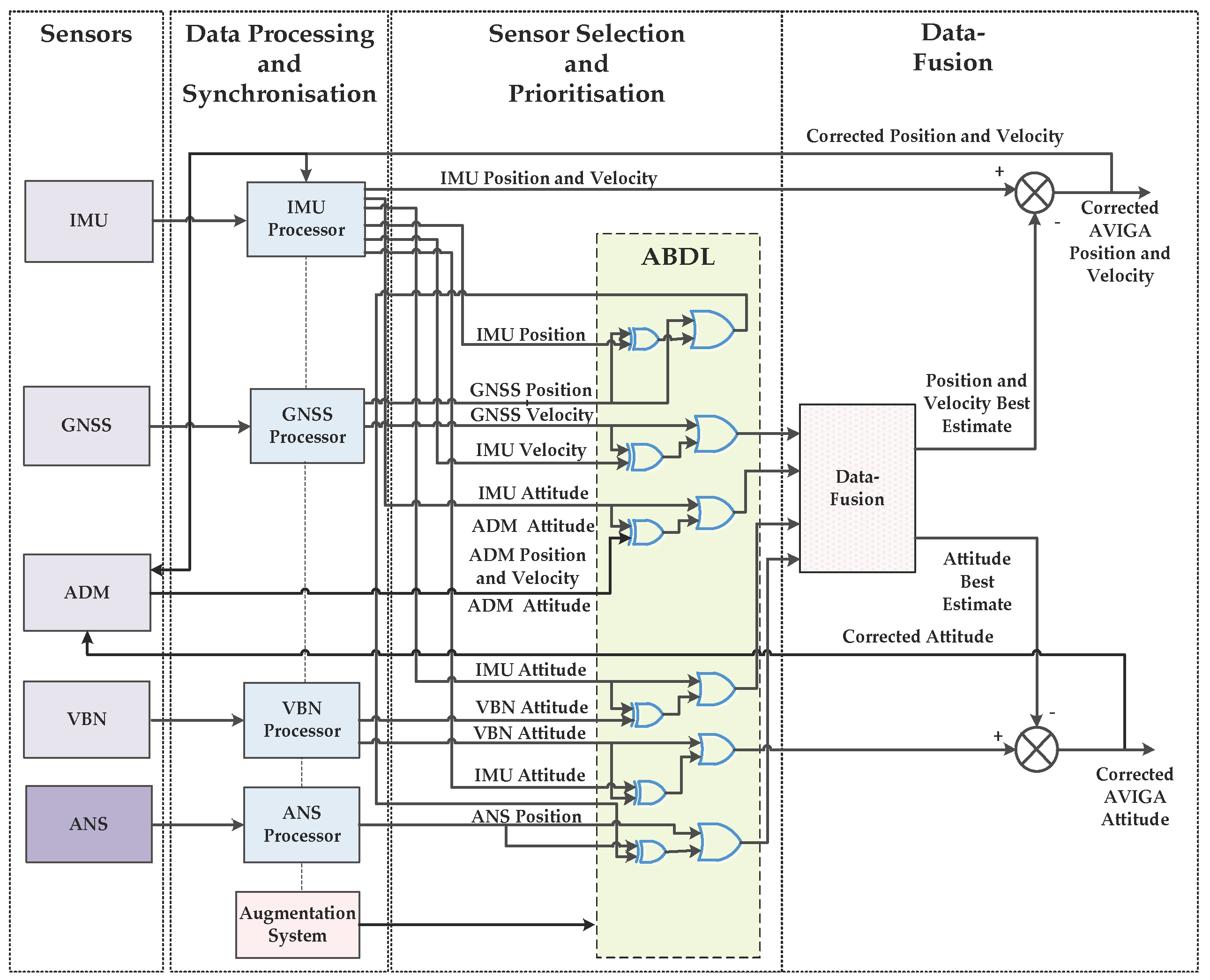
7. Integration of Acoustic Sensors in Multi-Sensor Navigation Systems
8. Conclusions and Recommendations for Future Research
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Griffin, D.R. Echolocation by blind men, bats and radar. Science 1944, 100, 589–590. [Google Scholar] [CrossRef] [PubMed]
- Sabatini, R.; Moore, T.; Hill, C. Avionics-based GNSS integrity augmentation for unmanned aerial systems sense-and-avoid. In Proceedings of the 27th International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS+ 2014), Tampa Convention Center, Tampa, FL, USA, 8–12 September 2014. [Google Scholar]
- Jones, G. Echolocation. Curr. Biol. 2005, 15, R484–R488. [Google Scholar] [CrossRef] [PubMed]
- Russo, D.; Jones, G.; Arlettaz, R. Echolocation and passive listening by foraging mouse-eared bats Myotis myotis and M. blythii. J. Exp. Biol. 2007, 210, 166–176. [Google Scholar] [CrossRef] [PubMed]
- Chiu, C.; Xian, W.; Moss, C.F. Flying in silence: Echolocating bats cease vocalizing to avoid sonar jamming. Proc. Natl. Acad. Sci. USA 2008, 105, 13116–13121. [Google Scholar] [CrossRef] [PubMed]
- Yovel, Y.; Geva-Sagiv, M.; Ulanovsky, N. Click-based echolocation in bats: Not so primitive after all. J. Comp. Physiol. A Neuroethol. Sens. Neural Behav. Physiol. 2011, 197, 515–530. [Google Scholar] [CrossRef] [PubMed]
- Simmons, J.A.; Ferragamo, M.; Moss, C.F.; Stevenson, S.B.; Altes, R.A. Discrimination of jittered sonar echoes by the echolocating bat, Eptesicus fuscus: The shape of target images in echolocation. J. Comp. Physiol. A 1990, 167, 589–616. [Google Scholar] [CrossRef] [PubMed]
- Xitco, M.J.; Roitblat, H.L. Object recognition through eavesdropping: Passive echolocation in bottlenose dolphins. Learn. Behav. 1996, 24, 355–365. [Google Scholar] [CrossRef]
- Adams, A.M.; Davis, K.; Smotherman, M. Suppression of emission rates improves sonar performance by flying bats. Sci. Rep. 2017, 7, 41641. [Google Scholar] [CrossRef] [PubMed]
- Abramson, N. THE ALOHA SYSTEM: Another alternative for computer communications. In Proceedings of the AFIPS ‘70 Fall Joint Computer Conference, Houston, TX, USA, 17–19 November 1970; pp. 281–285. [Google Scholar]
- Jones, G.; Teeling, E.C. The evolution of echolocation in bats. Trends Ecol. Evolut. 2006, 21, 149–156. [Google Scholar] [CrossRef] [PubMed]
- Animal diversity web. Available online: http://animaldiversity.org/ (accessed on 26 July 2017).
- Cvikel, N.; Levin, E.; Hurme, E.; Borissov, I.; Boonman, A.; Amichai, E.; Yovel, Y. On-board recordings reveal no jamming avoidance in wild bats. Proc. R. Soc. London B Biol. Sci. 2015, 282, 20142274. [Google Scholar] [CrossRef] [PubMed]
- Ulanovsky, N.; Fenton, M.B.; Tsoar, A.; Korine, C. Dynamics of jamming avoidance in echolocating bats. Proc. R. Soc. London B Biol. Sci. 2004, 271, 1467–1475. [Google Scholar] [CrossRef] [PubMed]
- Kolarik, A.J.; Cirstea, S.; Pardhan, S.; Moore, B.C. A summary of research investigating echolocation abilities of blind and sighted humans. Hear. Res. 2014, 310, 60–68. [Google Scholar] [CrossRef] [PubMed]
- Tao, Q.; Chan, C.C.; Luo, Y.-J.; Li, J.-J.; Ting, K.-H.; Lu, Z.-L.; Whitfield-Gabrieli, S.; Wang, J.; Lee, T.M. Prior Visual Experience Modulates Learning of Sound Localization Among Blind Individuals. Brain Topogr. 2017, 30, 364–379. [Google Scholar] [CrossRef] [PubMed]
- Ramezani, A.; Shi, X.; Chung, S.-J.; Hutchinson, S. Bat Bot (B2), a biologically inspired flying machine. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 3219–3226. [Google Scholar]
- Schnitzler, H.-U.; Vergl, J. Die Ultraschall-Ortungslaute der Hufeisen-Fledermäuse (Chiroptera-Rhinolophidae) in verschiedenen Orientierungssituationen. Zeitschrift Für Vergleichende Physiologie 1968, 57, 376–408. (In Germany) [Google Scholar] [CrossRef]
- Steckel, J.; Peremans, H. BatSLAM: Simultaneous localization and mapping using biomimetic sonar. PLoS ONE 2013, 8, e54076. [Google Scholar] [CrossRef] [PubMed]
- Big-eared-townsend-fledermaus. Available online: https://commons.wikimedia.org/wiki/File:Big-eared-townsend-fledermaus.jpg (accessed on 2 October 2017).
- Zagzebski, J.A. Essentials of Ultrasound Physics; Mosby: Maryland Heights, MO, USA, 1996. [Google Scholar]
- Sound Propagation Theory & Methodologies. Available online: http://www.npl.co.uk/upload/pdf/sound-propagation-theory-methodol-appendix_a.pdf (accessed on 19 April 2017).
- Bass, H.; Sutherland, L.; Zuckerwar, A.; Blackstock, D.; Hester, D. Atmospheric absorption of sound: Further developments. J. Acoust. Soc. Am. 1995, 97, 680–683. [Google Scholar] [CrossRef]
- Attenborough, K. Sound propagation in the atmosphere. In Springer Handbook of Acoustics; Springer: Berlin, Germany, 2014; pp. 117–155. [Google Scholar]
- Kneizys, F.X.; Shettle, E.; Abreu, L.; Chetwynd, J.; Anderson, G. Users Guide to LOWTRAN 7; Air Force Geophysics Lab: Hanscom AFB, MA, USA, 1988. [Google Scholar]
- Sabatini, R.; Richardson, M. Airborne Laser Systems Testing and Analysis; The Research and Technology Organisation: Neuilly-sur-Seine, France, 2010. [Google Scholar]
- Norma, I. ISO 9613-2:1996: Acoustics—Attenuation of Sound During Propagation Outdoors—Part 2: General Method of Calculation; International Organization for Standardization: Geneva, Switzerland, 1996. [Google Scholar]
- Daigle, G.; Piercy, J.; Embleton, T. Line-of-sight propagation through atmospheric turbulence near the ground. J. Acoust. Soc. Am. 1983, 74, 1505–1513. [Google Scholar] [CrossRef]
- Juvé, D.; Blanc-Benon, P.; Chevret, P. Sound propagation through a turbulent atmosphere: Influence of the turbulence model. In Proceedings of the Sixth International Symposium on Long Range Sound Propagation, NRC Canada, Ottawa, ON, Canada, 1994; pp. 270–282. [Google Scholar]
- Von Karman, T. Progress in the statistical theory of turbulence. Proc. Natl. Acad. Sci. USA 1948, 34, 530–539. [Google Scholar] [CrossRef] [PubMed]
- Johnson, M.A.; Raspet, R.; Bobak, M.T. A turbulence model for sound propagation from an elevated source above level ground. J. Acoust. Soc. Am. 1987, 81, 638–646. [Google Scholar] [CrossRef]
- Zaporozhets, O.; Tokarev, V.; Attenborough, K. Aircraft Noise: Assessment, Prediction and Control; CRC Press: Boca Raton, FL, USA, 2011. [Google Scholar]
- Organización Internacional de Normalización. ISO 9613-1: 1993 Acoustics: Attenuation of Sound during Propagation Outdors. Caldulation of the Absorption of Sound by the Atmosphere; International Organization for Standardization: Geneva, Switzerland, 1993. [Google Scholar]
- Wiener, F.M.; Keast, D.N. Experimental study of the propagation of sound over ground. J. Acoust. Soc. Am. 1959, 31, 724–733. [Google Scholar] [CrossRef]
- Crocker, M.J. Handbook of Acoustics; John Wiley & Sons: Hoboken, NJ, USA, 1998. [Google Scholar]
- Sabatini, R.; Moore, T.; Hill, C. A New Avionics-Based GNSS Integrity Augmentation System: Part 1–Fundamentals. J. Navig. 2013, 66, 363–384. [Google Scholar] [CrossRef]
- Bijjahalli, S.; Ramasamy, S.; Sabatini, R. A novel vehicle-based GNSS integrity augmentation system for autonomous airport surface operations. J. Intell. Robot. Syst. 2017, 87, 379–403. [Google Scholar] [CrossRef]
- Jensen, F.B.; Kuperman, W.A.; Porter, M.B.; Schmidt, H. Computational Ocean Acoustics; Springer Science & Business Media: Berlin, Germany, 2000. [Google Scholar]
- Ruijgrok, G.J. Elements of Aviation Acoustics; Delft University Press: Delft, The Netherlands, 2004. [Google Scholar]
- Kapoor, R.; Ramasamy, S.; Gardi, A.; Bieber, C.; Silverberg, L.; Sabatini, R. A novel 3D multilateration sensor using distributed ultrasonic beacons for indoor navigation. Sensors 2016, 16, 1637. [Google Scholar] [CrossRef] [PubMed]
- Phillips, A.H. Geometrical determination of PDOP. Navigation 1984, 31, 329–337. [Google Scholar] [CrossRef]
- Roa, J.O.; Jiménez, A.R.; Seco, F.; Prieto, J.C.; Ealo, J. Optimal placement of sensors for trilateration: Regular lattices vs meta-heuristic solutions. In International Conference on Computer Aided Systems Theory; Springer: Berlin/Heidelberg, Germany, 2007; pp. 780–787. [Google Scholar]
- Kapoor, R.; Ramasamy, S.; Gardi, A.; Sabatini, R. A bio-inspired acoustic sensor system for UAS navigation and tracking. In Proceedings of the 2017 IEEE/AIAA 36th Digital Avionics Systems Conference (DASC), St. Petersburg, FL, USA, 17–21 September 2017; pp. 1–7. [Google Scholar]
- Sabatini, R.; Moore, T.; Ramasamy, S. Global navigation satellite systems performance analysis and augmentation strategies in aviation. Prog. Aerosp. Sci. 2017, 95, 45–98. [Google Scholar] [CrossRef]
- Foy, W.H. Position-location solutions by Taylor-series estimation. IEEE Trans. Aerosp. Electron. Syst. 1976, AES-12, 187–194. [Google Scholar] [CrossRef]
- Navidi, W.; Murphy, W.S.; Hereman, W. Statistical methods in surveying by trilateration. Comput. Stat. Data Anal. 1998, 27, 209–227. [Google Scholar] [CrossRef]
- Coope, I. Reliable computation of the points of intersection of $ n $ spheres in $ R^ n$. ANZIAM J. 2000, 42, 461–477. [Google Scholar] [CrossRef]
- Pent, M.; Spirito, M.; Turco, E. Method for positioning GSM mobile stations using absolute time delay measurements. Electron. Lett. 1997, 33, 2019–2020. [Google Scholar] [CrossRef]
- Fang, B.T. Trilateration and extension to global positioning system navigation. J. Guid. Control Dyn. 1986, 9, 715–717. [Google Scholar] [CrossRef]
- Ziegert, J.C.; Mize, C.D. The laser ball bar: A new instrument for machine tool metrology. Precis. Eng. 1994, 16, 259–267. [Google Scholar] [CrossRef]
- Manolakis, D.E. Efficient solution and performance analysis of 3-D position estimation by trilateration. IEEE Trans. Aerosp. Electron. Syst. 1996, 32, 1239–1248. [Google Scholar] [CrossRef]
- Thomas, F.; Ros, L. Revisiting trilateration for robot localization. IEEE Trans. Robot. 2005, 21, 93–101. [Google Scholar] [CrossRef]
- Zhou, Y. A closed-form algorithm for the least-squares trilateration problem. Robotica 2011, 29, 375–389. [Google Scholar] [CrossRef]
- Yayan, U.; Yucel, H.; Yazici, A. A low cost ultrasonic based positioning system for the indoor navigation of mobile robots. J. Intell. Robot. Syst. 2015, 78, 541–552. [Google Scholar] [CrossRef]
- Gualda, D.; Ureña, J.; García, J.C.; Lindo, A. Locally-referenced ultrasonic–LPS for localization and navigation. Sensors 2014, 14, 21750–21769. [Google Scholar] [CrossRef] [PubMed]
- Ureña, J.; Hernández, A.; Jiménez, A.; Villadangos, J.M.; Mazo, M.; García, J.; García, J.J.; Álvarez, F.J.; De Marziani, C.; Pérez, M. Advanced sensorial system for an acoustic LPS. Microprocess. Microsyst. 2007, 31, 393–401. [Google Scholar] [CrossRef]
- Seco, F.; Prieto, J.C.; Ruiz, A.R.J.; Guevara, J. Compensation of multiple access interference effects in CDMA-based acoustic positioning systems. IEEE Trans. Instrum. Meas. 2014, 63, 2368–2378. [Google Scholar] [CrossRef]
- Priyantha, N.B. The Cricket Indoor Location System; Massachusetts Institute of Technology: Cambridge, MA, USA, 2005. [Google Scholar]
- Fukuju, Y.; Minami, M.; Morikawa, H.; Aoyama, T. DOLPHIN: An Autonomous Indoor Positioning System in Ubiquitous Computing Environment. In Proceedings of the WSTFES 2003 IEEE Workshop on Software Technologies for Future Embedded Systems, Hokkaido, Japan, 15–16 May 2003. [Google Scholar]
- Harter, A.; Hopper, A.; Steggles, P.; Ward, A.; Webster, P. The anatomy of a context-aware application. Wirel. Netw. 2002, 8, 187–197. [Google Scholar] [CrossRef]
- Park, J.; Choi, M.; Zu, Y.; Lee, J. Indoor localization system in a multi-block workspace. Robotica 2010, 28, 397–403. [Google Scholar] [CrossRef]
- Berger, C.; Hansson, J. COTS-architecture with a real-time OS for a self-driving miniature vehicle. In Proceedings of the SAFECOMP 2013-Workshop ASCoMS (Architecting Safety in Collaborative Mobile Systems) of the 32th International Conference on Computer Safety, Reliability and Security, Toulouse, France, 24–27 September 2013. [Google Scholar]
- Rivard, F.; Bisson, J.; Michaud, F.; Létourneau, D. Ultrasonic relative positioning for multi-robot systems. In Proceedings of the 2008 IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; pp. 323–328. [Google Scholar]
- Kay, L. An ultrasonic sensing probe as a mobility aid for the blind. Ultrasonics 1964, 2, 53–59. [Google Scholar] [CrossRef]
- Ifukube, T.; Sasaki, T.; Peng, C. A blind mobility aid modeled after echolocation of bats. IEEE Trans. Biomed. Eng. 1991, 38, 461–465. [Google Scholar] [CrossRef] [PubMed]
- Mihajlik, P.; Guttermuth, M.; Seres, K.; Tatai, P. DSP-based ultrasonic navigation aid for the blind. In Proceedings of the IMTC 2001 18th IEEE Instrumentation and Measurement Technology Conference Rediscovering Measurement in the Age of Informatics (Cat. No.01CH 37188), Budapest, Hungary, 21–23 May 2001; pp. 1535–1540. [Google Scholar]
- Ulrich, I.; Borenstein, J. The GuideCane-applying mobile robot technologies to assist the visually impaired. IEEE Trans. Syst. Man Cybern. Part A Syst. Hum. 2001, 31, 131–136. [Google Scholar] [CrossRef]
- Marion, A.; Michael, A. Assistive Technology for Visually Impaired and Blind People; Springer: London, UK, 2008. [Google Scholar]
- Sabatini, R.; Moore, T.; Hill, C. A new avionics-based GNSS integrity augmentation system: Part 2–Integrity flags. J. Navig. 2013, 66, 501–522. [Google Scholar] [CrossRef]
- Sabatini, R.; Richardson, M.; Bartel, C.; Shaid, T.; Ramasamy, S. A low-cost vision based navigation system for small size unmanned aerial vehicle applications. J. Aeronaut. Aerosp. Eng. 2013, 2, 1–16. [Google Scholar] [CrossRef]
- Cappello, F.; Ramasamy, S.; Sabatini, R. A low-cost and high performance navigation system for small RPAS applications. Aerosp. Sci. Technol. 2016, 58, 529–545. [Google Scholar] [CrossRef]
- Grabe, V.; Bülthoff, H.H.; Giordano, P.R. On-board velocity estimation and closed-loop control of a quadrotor UAV based on optical flow. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 491–497. [Google Scholar]
- Wu, A.; Johnson, E.N.; Kaess, M.; Dellaert, F.; Chowdhary, G. Autonomous Flight in GPS-Denied Environments Using Monocular Vision and Inertial Sensors. J. Aerosp. Inf. Syst. 2013, 10, 172–186. [Google Scholar]
- Pfeifer, N.; Glira, P.; Briese, C. Direct georeferencing with on board navigation components of light weight UAV platforms. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, 39, B7. [Google Scholar] [CrossRef]
- Schillebeeckx, F.; De Mey, F.; Vanderelst, D.; Peremans, H. Biomimetic sonar: Binaural 3D localization using artificial bat pinnae. Int. J. Robot. Res. 2011, 30, 975–987. [Google Scholar] [CrossRef]
- Aiordachioaie, D.; Frangu, L.; Epure, S. Airborne ultrasonic image generation with biomimetic sonar head. IET Radar Sonar Navig. 2013, 7, 933–949. [Google Scholar] [CrossRef]
- Kapoor, R.; Ramasamy, S.; Gardi, A.; Sabatini, R. UAV Navigation using Signals of Opportunity in Urban Environments: A Review. Energy Procedia 2017, 110, 377–383. [Google Scholar] [CrossRef]
- Jin, J.; Gubbi, J.; Marusic, S.; Palaniswami, M. An information framework for creating a smart city through internet of things. IEEE Internet Things J. 2014, 1, 112–121. [Google Scholar] [CrossRef]
- Fazenda, B.; Atmoko, H.; Gu, F.; Guan, L.; Ball, A. Acoustic based safety emergency vehicle detection for intelligent transport systems. In Proceedings of the 2009 ICCAS-SICE, Fukuoka, Japan, 18–21 August 2009; pp. 4250–4255. [Google Scholar]
- Perkins, H.D.; Paxson, D.E.; Snyder, C.A. Advanced Engine Designs and Concepts Beyond the Geared Turbofan. In Encyclopedia of Aerospace Engineering; John Wiley and Sons, Inc.: Hoboken, NJ, USA, 2016; pp. 1–13. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Diet | Echolocation Call Type | Bat Species |
|---|---|---|
| Fruits | Broadband clicks of short duration | Egyptian fruit bat |
| Moths, beetles, flies and other insects | Narrowband with dominant fundamental harmonic | Eastern red bat |
| Flying insects and small fruits | Multiharmonic narrowband, faintly audible to humans | Black-bearded tomb bat |
| Aquatic insects like midges, crane flies and black flies | Short, broadband, with dominant fundamental harmonic | Daubenton’s bat |
| Large insects, spiders and small vertebrates | Short, multiharmonic broadband | Greater false vampire bat |
| Moths | Long, multiharmonic broadband | Madagascar sucker-footed bat |
| Butterfly, moths and beetles | Constant frequency (CF) & Frequency Modulated (FM) | Greater horseshoe bat |
| Beetles, moths, flies, wasps, and flying ants | Downswept FM narrowband | Big brown bat |
| Beetles, moths, flies, and small insects | FM broadband | Townsend’s big-eared bat |
| Type | Parameters |
|---|---|
| Design parameters | Transmitted power, carrier frequency and PRF |
| Measured observables | Range, velocity, azimuth and elevation |
| Environmental parameters | Temperature, wind, humidity and environmental layout |
| Performance indicators | Position accuracy and maximum range |
| Variable | Value (Unit) |
|---|---|
| Speed of sound at sea level () | () |
| Time of flight () | () |
| Mach number for the sound source () | |
| Direction of receiver motion to the LOS () | () |
| Variation of temperature with height ( | () |
| Speed of sound emitted by source () at 20 °C | () |
| Distance between ith transmitter and receiver () | () |
| Distance between ith transmitter and reflection point () | () |
| Distance between ith receiver and reflection point () | () |
| Sea-level temperature () | () |
| Horizontal wind velocity () | () |
| Angle of wavefront normal with the horizontal () | () |
| Ultrasonic Sensor | Manufacturer | Transducer Frequency | Detection Range (mm) |
|---|---|---|---|
| MA40SR/S | Murata | 40 kHz | Sound Pressure Level (SPL) dependent |
| MB8450 | MaxBotix | 42 kHz | 500–5000 |
| MA58MF14-7N | Murata | 58 kHz | SPL dependent |
| UC6000-30GM-E6R2-V15 | Pepperl + Fuchs | 65 kHz | 350–6000 |
| XX630A3PCM12 | Telemecanique Sensors | 75 kHz | 203–8000 |
| 3RG6014-3AD00-PF | Pepperl + Fuchs | 80 kHz | 600–6000 |
| UC4000-30GM-IUR2-V15 | Pepperl + Fuchs | 85 kHz | 200–4000 |
| UM30-214113 | Sick | 120 kHz | 350–3400 |
| UB2000-F54-I-V15 | Pepperl + Fuchs | 175 kHz | 80–2000 |
| UC2000-30GM-IUR2-V15 | Pepperl + Fuchs | 180 kHz | 80–2000 |
| BUS M18M1-GPXI-12/100-S92G | Balluff | 200 kHz | 120–1300 |
| T30UIPAQ | Banner | 228 kHz | 150–1000 |
| UGT507 | ifm electronic | 230 kHz | Maximum of 1200 |
| UNDK 30U6103/S14 | Baumer | 240 kHz | 100–1000 |
| UNDK 20U 6912 | Baumer | 290 kHz | 60–400 |
| XX518A3PAM12 | Telemecanique Sensors | 300 kHz | 51–508 |
| UB400-12GM-E5-V1 | Pepperl + Fuchs | 310 kHz | 30–400 |
| BUS M30M1-PPX-03/25-S92K | Balluff | 320 kHz | 30–350 |
| XXV18B1PBM12 | Telemecanique Sensors | 360 kHz | 3–50 |
| UB500-18GM75-E5-V15 | Pepperl + Fuchs | 380 kHz | 30–500 |
| UB300-18GM40-E5-V1 | Pepperl + Fuchs | 390 kHz | 30–300 |
| UM30-212113 | Sick | 400 kHz | 60–350 |
| XX512A1KAM8 | Telemecanique Sensors | 500 kHz | 25–152 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kapoor, R.; Ramasamy, S.; Gardi, A.; Schyndel, R.V.; Sabatini, R. Acoustic Sensors for Air and Surface Navigation Applications. Sensors 2018, 18, 499. https://doi.org/10.3390/s18020499
Kapoor R, Ramasamy S, Gardi A, Schyndel RV, Sabatini R. Acoustic Sensors for Air and Surface Navigation Applications. Sensors. 2018; 18(2):499. https://doi.org/10.3390/s18020499
Chicago/Turabian StyleKapoor, Rohan, Subramanian Ramasamy, Alessandro Gardi, Ron Van Schyndel, and Roberto Sabatini. 2018. "Acoustic Sensors for Air and Surface Navigation Applications" Sensors 18, no. 2: 499. https://doi.org/10.3390/s18020499
APA StyleKapoor, R., Ramasamy, S., Gardi, A., Schyndel, R. V., & Sabatini, R. (2018). Acoustic Sensors for Air and Surface Navigation Applications. Sensors, 18(2), 499. https://doi.org/10.3390/s18020499