1. Introduction
The high-speed-rotation and high-overload missile, as a kind of common missile, plays an essential role in modern military warfare [
1,
2]. Furthermore, the high-precision measurement of high-speed rotation missile attitude information is the key technology of guidance and precision strike, which is the main development trend of conventional high-speed rotation missile guidance [
3,
4]. Therefore, the implementation of accurate navigation and positioning for high-rotation and high-overload missiles is a key technology that needs an urgent breakthrough [
5,
6]. The data shows that the initial velocity of the missile launch is about 550 m/s, and its overload is up to 10,000 g, which makes most types of sensors not work properly. As a common device in inertial navigation, Micro-Electro-Mechanical-System (MEMS) sensors are widely used in navigation guidance because of their small size, low cost, and strong anti-overload capability [
7]. Therefore, we choose Miniature Inertial Measurement Unit (MIMU) sensors to measure velocity, position, and attitude information. However, the common Strap-down Inertial Navigation System (SINS) is not suitable for high-dynamic, high-spinning, and high-overload missiles, due to the fact that the accelerometer and the gyroscope have poor anti-overload capability without protection, and the range of sensors used in the SINS is too large, resulting in a decrease in accuracy [
8]. In this case, different from traditional measurement methods, the concept of Semi-Strapdown Inertial Navigation System (SSINS) is proposed by Key Laboratory of Instrumentation Science & Dynamic Measurement [
9,
10]. A mechanical structure, the Semi-strap-down Stabilized Platform (SSP) is a key part of SSINS, its main function is to reduce the range of sensors required and resist overload [
11]. Therefore, we should further analyze its principle and design its structure, in order to achieve the optimal choice of sensor range, and improve the accuracy of navigation solution.
In recent years, the measurement of missile attitude has attracted amount of attention. Raúl de Celis et al. proposed an approach for guidance of high rate spinning ballistic rockets, which is based on an innovative hybridization between GNSS/accelerometer and semi-active laser quadrant photo-detector [
12]. In [
12], the fusion scheme is studied, and it can precisely measure the attitude of the high-rotation missile, however GNSS cannot be completely independent and is not suitable for high overload environments. In Li’s paper, a method based on photoelectric theodolite to measure the roll angle of ammunition is proposed [
13]. This method can precisely measure the roll angle of ammunition, applicable to measure the roll angle of low-dynamic missile. In Beijing Institute of Technology, two Micro-Electro-Mechanical System (MEMS) accelerometers are used to measure the roll angle of high-speed missile. This system puts the MEMS sensor inside the high-rotation missile [
14,
15]. Firstly, the system measurement equations and statistical model equations are established. Then, the improved adaptive Unscented Kalman Filter (UKF) nonlinear filtering algorithm is used to improve the accuracy of the calculation. Compared with other methods, this method emphasizes the study of the algorithm more [
16].
The above methods provide many means for realizing the measurement of the roll angle of high-rotation missiles, but these methods have inevitably used large-range sensors. In the case of the existing sensor processing technology, there is a problem that the wide range sensor is not possible to meet the low-cost and high-precision requirements at the same time. To solve these problems, it is not sufficient to improve the accuracy of the solution by simply improving the algorithm. Therefore, a new flight attitude measurement system, SSINS, was used to solve these problems. Moreover, in SSINS, the key part to the range selection of the sensor that measures the roll angle is the SSP, and the rationality of its design is directly related to the accuracy of the navigation solution, because the SSP can equivalently reduce the range of the required sensor [
17,
18]. This structure is mounted inside the missile and used to mount MEMS inertial sensors. In contrast to SINS, the SSINS Inertial Measurement Unit (IMU) for signal acquisition is mounted on a SSP, and the SSP is not rigidly attached to the missile, but is connected to the missile via bearings, which provides a stable low-dynamic environment for the IMU and eliminates the interference of the high-speed rotation on the device’s accuracy. Therefore, the gyros with small range can be used to measure the missile’s attitude information in a relatively stable environment. In reference [
17], Zhang et al. presented a measurement method for the realization of high-rotation missiles, which is a new compensation method that is proposed to remove or reduce sensor errors, so as to make it possible to maintain high precision autonomous navigation performance by MIMU when there is no external aiding. Among them, the motor is used to implement the rotation modulation method. Due to the fact that the servo motor cannot withstand a large impact, it is easily damaged or even destroyed under high overload conditions. Considering the above situation, this system may has poor stability in achieving attitude measurement in high overload environments.
In reference [
18], in our lab, Duan et al. obtained the Semi-strap-down Stabilized Platform (SSP), using gravity to control the roll angular rate of the SSP. This paper analyzed and validated the dynamic model of the SSP on the ground, and proved the effectiveness of the model in the ground-based experiment. However, he did not analyze the impact of the missile’s lift force on the SSP. During the flight of a missile, due to the change of lift force, the SSP has three different states: Overweight, weightless, and normal state. The three different states have a non-negligible impact on the stability of the SSP. Therefore, in order to achieve accurate measurement of missile navigation parameters, it is necessary to consider the indirect effects of lift force on the SSP.
In the past, in order to improve the stability of the SSP, our laboratory applied many methods to reduce the friction torque of bearing. For example, in reference [
19], the SSP optimization design with a dual bearing nested structure was proposed in our lab.
Above all, in order to better replace wide-range sensors with small-range sensors, we have conducted further research. This paper describes the design and implementation of the new SSP based on the Missile-borne Semi-Strap-down Inertial Navigation System in the high-speed rotation missile-borne environment using three steps, which are described as follows. In the first step, according to the dynamic model of the stabilized platform in the ground-based experiment, the lift force of a missile is calculated when flying at 2° angle of attack, and the dynamic model of the SSP is given in the high-speed rotation missile-borne environment. The second step combines the characteristics of the space reserved inside the missile and gives the optimal design of the SSP. The last step achieves the best quality of the SSP, which can minimize the roll angular rate and roll angle of the SSP by controlling the quality of the platform. Using the Runge-Kutta method and mass gradient control method to calculate and plot the time-varying curve of the roll angle and angular rate of the SSP under different conditions, the best quality of the platform is obtained. In order to verify the above conclusions, we installed the prototype of the SSP on the flight simulation turntable and did an experiment, and the experiment results were in accordance with the theoretical results.
The remainder of this paper is organized as follows.
Section 2 illustrates the working principle of the Semi-strap-down Inertial Navigation System (SSINS) and the relationship between the quality selection method of the SSP and the range of the Inertial Measurement Unit. The stability principle of the SSP is introduced and the dynamic model of the SSP in the high-speed rotation missile-borne environment is obtained. Then the SSP optimal quality selection method is proposed in
Section 3.
Section 4 is the implementation of the SSP, as well as test verification. The conclusion is given in
Section 5.
2. Semi-Strap-down Inertial Navigation System
2.1. The Composition and Working Principle of the SSINS
In the launch stage of the missile, assuming that the attitude of the missile is measured using the Strap-down Inertial Navigation System (SINS), the rolling axial angular rate of the SSINS will increase rapidly in a short period of time, for example, a certain missile will reach 30 r/s (10,800°/s). According to the different orthogonality of the sensor’s sensitive axis in the Micro Inertial Measurement Unit (MIMU), the angular rate’s components that the gyroscope is sensitive to will also vary in the missile’s pitch and yaw directions. In order to be able to measure the axial rotation speed of the missile, the SINS is equipped with a large-scale MEMS gyroscope, that is, a sensor with a range greater than 30 r/s. However, in the conditions of current technological level, wide-range MEMS sensors have low precision, so a large measurement error is generated in measuring the axial rotational speed of the missile. Then, we use the data with measurement error to solve the attitude of the missile, and the navigation solution error will inevitably be larger. Therefore, the accuracy of the SSINS’s angular rate measurement being too low is the most critical reason for limiting the positioning accuracy of the missile.
In order to solve the problem that the wide-range sensor cannot meet the requirements of high-precision navigation, the SSINS is innovatively designed based on the SINS.
Figure 1 depicts the overall scheme of the Semi-strap-down Inertial Navigation System (SSINS), which is used to measure the missile navigation parameters. It can be seen from the
Figure 1 that the MIMU is integrated inside the SSP. The SSINS is combined with a certain algorithm. For the convenience of description, the coordinate systems are defined as follows: The navigation coordinate system (N-frame) is chosen as the local geographical coordinate frame; the body coordinate system (B-frame) is the missile coordinate system. As the SSP equipped with an IMU is swinging in the SSINS, a new frame in which the inertial readings are collected is introduced. The new coordinate system can be referred as SSP frame (P-frame), since the IMU and the SSP are fixedly connected, so its axis is aligned with the sensitive axis of inertial sensors. Generally speaking, the navigation solution of SSINS is similar to that of conventional INS. Nevertheless, the inertial sensor outputs are collected from P-frame in SSINS. The solution algorithm is designed based on the relationship between IMU output information and missile motion parameters. As shown in
Figure 1, this system can realize the measurement of most of navigation parameters through the data measured by the IMU in the SSP.
The specific arrangement of the SSINS is shown in
Figure 2. The SSINS is mainly composed of two parts. The stabilized platform for carrying the sensor is the inner cylinder, and the rest is called the outer cylinder. An IMU is installed in the inner cylinder, and mainly contains three MEMS gyroscopes and three MEMS accelerometers. The outer cylinder shell of the SSINS is fixedly connected with the missile, and the outer cylinder is equipped with an optical-electricity encoder and a top-to-top hemisphere structure.
In the SSINS, the photoelectric encoder is used to measure the relative rotation angle of the outer cylinder and the inner cylinder. The photoelectric encoder we used is an incremental photoelectric encoder with a resolution of 1024 P/R. The photoelectric encoder shell is fixed to the SSINS’s outer cylinder by screws, and the front part of the rotating shaft of the photoelectric encoder is semi-cylindrical, so that the photoelectric encoder’s rotating shaft can be fixedly connected with the inner cylinder, that is, both ends of the photoelectric encoder are respectively fixed to the outer cylinder and the inner cylinder. When the outer cylinder rotates synchronously with the missile, the photoelectric encoder body then rotates along with the outer cylinder, while the photoelectric encoder‘s shaft rotates following the inner cylinder, so that the relative rotation angles of the inner cylinder and the outer cylinder can be measured. After that, the relative rotation angle measured by the photoelectric encoder and the rolling attitude angle measured by gyro are summed to complete the measurement of the parameters of the missile’s rolling axis.
The SSINS has implemented overload protection in many aspects, such as top-to-top hemisphere structure. The top-to-top hemisphere structure is an axial anti overload device, the main function of which is to prevent the bearings from being damaged when the missile is subjected to overload during launch. The entire flight process of the missile can be roughly divided into three stages, namely the interior ballistic launch stage, the engine propulsion stage, and the inertial free flight stage. In order to ensure the effective work of the SSP, the top-to-top hemisphere structure is designed for the interior ballistic launch phase and the engine propulsion phase, because the overload during the above two launch phase is too large. The contact of the upper and lower parts of the top-to-top hemisphere effectively protects the bearing and ensures that the SSP can work normally.
When the SSP is under the action of the bearing friction torque and the equivalent gravity torque, it does not completely follow the high speed rotation of the missile, and at this time the SSP is in a slightly rotated state relative to the ground. As can be seen from the above, the SSP plays a key role in the selection of the IMU range. Generally, the swing amplitude of the SSP is not particularly large, therefore a gyroscope with a range of about 200°/s can satisfy the measurement requirements in the direction of the roll axis of the SSP. In the direction of the pitch axis and the yaw axis of the missile, the gyroscope’s range only needs about 75°/s to meet the actual measurement requirements. Compared with the range of the gyroscope (its range is 10,800°/s) in the direction of the rolling axis of the SINS, the SSINS only needs to be 1/54 of this, which shows that the existence of the SSP effectively reduces the range of sensors and improves the navigation accuracy.
In conclusion, the missile is in a high-rotation state throughout the flight stage. In order to reduce the sensor range requirement in the high-speed rotation missile environment, a SSP that can isolate the high-rotational motion of the missile is designed, and the navigation solution accuracy is improved by reducing the requirement of sensor range. Nevertheless, the IMU is fixedly connected to the SSP, and the selection of the sensor’s range in the IMU is a key factor affecting the navigation accuracy of the SSINS.
2.2. The Relative Position of IMU and the Choice of IMU Range.
Micro Inertial Measurement Unit (MIMU) is the main sensor part of the SSINS. The composition of MIMU used in this system is shown as
Figure 1: The yellow square represents MEMS gyro and the blue square represents MEMS accelerometer. MIMU is consisted of three mutually orthogonal MEMS accelerometers and three mutually orthogonal MEMS gyroscopes. A gyroscope and an accelerometer are mounted on one axis, but their directions are opposite. IMU is fixed within the SSP′s shell, and is used to measure the real-time angular velocity of the SSP. IMU is an information-sensitive module of inertial measurement system. The key idea of design is to ensure the sensitive axis is fit with three-dimensional orthogonal installation as much as possible. Of course, its structure should be as sturdy and compact as possible. Here, the coordinate system O
b-R
bY
bP
b is fixedly connected to the missile coordinate system, and the coordinate system O
p-R
pY
pP
p is fixedly connected to the IMU coordinate system. Lastly, R represents the roll axis, Y represents the yaw axis, and P represents the pitch axis.
The schematic diagram of the relative position of MIMU is shown in
Figure 3. Since the MIMU and the SSP are fixed together, the movement state of the MIMU and the SSP is the same during the flight of the missile. According to the installation method of the SSP in the missile, the gyro in the IMU can directly measure the attitude of the pitch and yaw of the missile, while the gyro of the roll axis measures the microrotation roll attitude angle of the SSP relative to the ground. Then, the microrotation roll attitude angle is summed with the relative rotation angle measured by the photoelectric encoder to obtain the roll attitude angle of the missile. The three sensitive axes of the IMU can be considered to be perpendicular to each other by calibration. The angular rates of the three sensitive axes of the IMU are quite different. For example, the roll angular rate of a certain type of missile is about 54 times the angular rate of the pitch and yaw directions. However, the installation error cannot be completely eliminated by calibration. Due to the fact that the roll angular rate is too large, a big angular velocity component is generated in the pitch and yaw axes, thereby affecting the accuracy of the missile’s navigation solution. It can be seen that reducing rotation has important significance for not only for the roll axis, but also the pitch and yaw axes.
The concept of “rotary axial isolation and radial strapdown” is realized by the SSP. In the past SSP design process, we can only select the parameters of internal sensors by experience. Moreover, there is no introduction to the selection method for the quality of the SSP in the existing materials. How to quantitatively reduce the range of MEMS inertial sensors carried in the SSP is a key issue to be solved in this article.
In order to avoid the over-range phenomenon, the selected sensor range is often larger than the actual SSP maximum angular rate.
Table 1 shows the parameters of the IMU before the SSP is optimized.
The design method and quality choice of the SSP are not only related to reducing the effect of rotation, but also related to the range of sensors we choose. The unreasonable design of the SSP not only reduces the rotational speed of the missile incompletely, but also leads to a decline in navigation accuracy by relying solely on experience to select the range. Therefore, there is an urgent need for a theoretical guide to the design method and quality choice of the SSP, to help us analyze the effect of SSP parameter selection on the isolation rotation effect and how to optimize for sensor range selection.
This section introduces a novel SSINS that uses MEMS inertial sensors to realize the navigation and positioning function of high-rotation missiles, and describes in detail how MEMS sensors and photoelectric encoders jointly measure the parameters of the missile. Since the design of the SSP determines the sensor range selection, it is necessary to start from the principle of the SSP, so that mounted the MEMS inertial sensor is better applied.
4. Test Verification
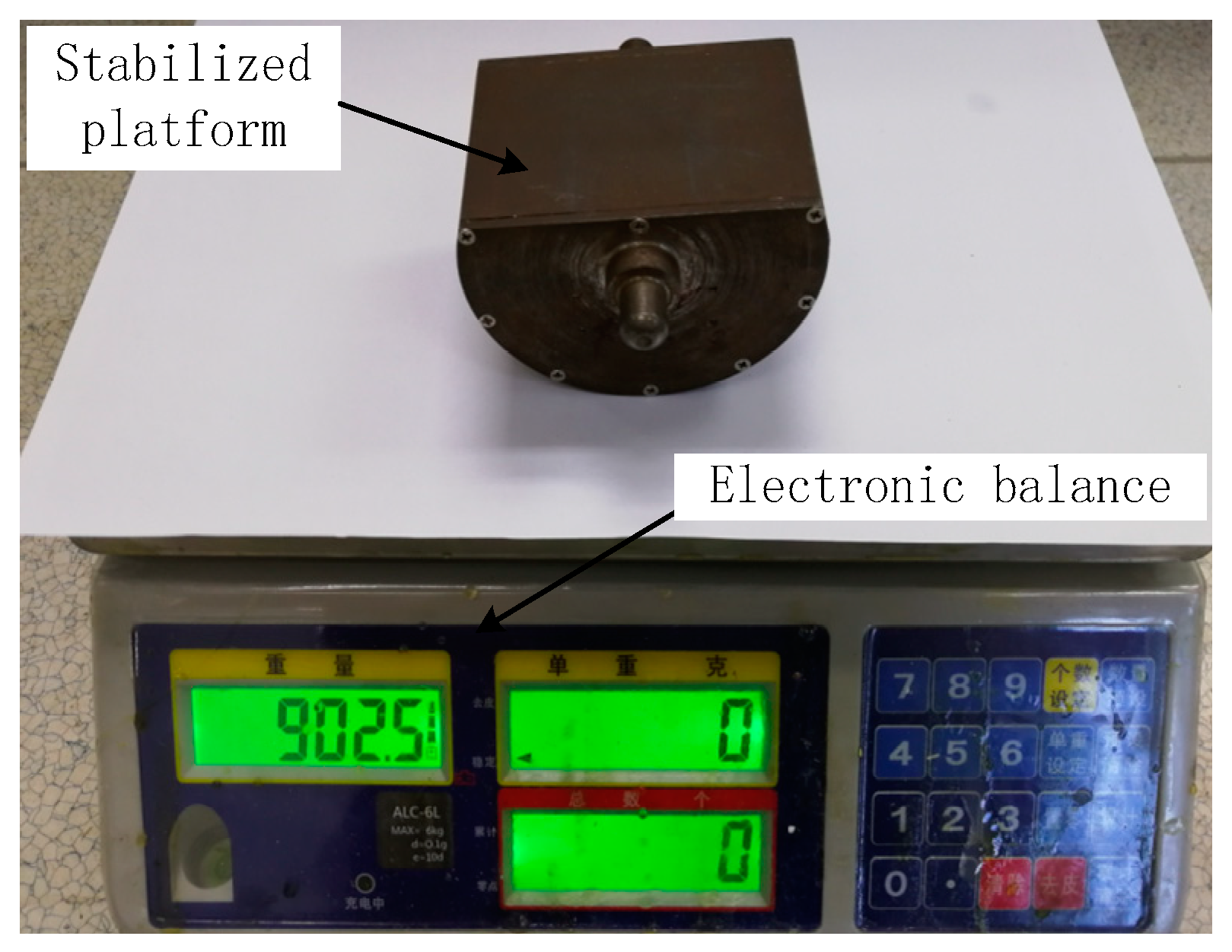
According to the above analysis, the quality of each part of the SSP was strictly controlled, and the quality of the final integrated SSP is 1494.6 g. The quality of the optimized SSP and the unoptimized SSP is shown in
Figure 11 and
Figure 12, respectively. It is obvious that the quality of optimized SSP is larger than the unoptimized SSP.
A number of shooting tests were conducted by using the unoptimized system and the optimized system. Test results showed that the measurement precision of the optimized system is higher than the unoptimized system. Due to the variability of the shooting test conditions, the superiority of the optimized system cannot be fully explained. According to the above, when the attack angle of the missile is 2°, the lift force of the missile is greater than gravity. In this condition, the stability of the SSP is better than that of the ground test. Therefore, the ground test can be used to verify the stability of the new SSP. In order to verify the isolation effect of the SSP to the high-speed rotational motion of the missile and the correctness of the theoretical analysis, a SSINS with SSP was used to perform the experiments by using a high-precision tri-axial flight simulator. The tri-axial flight simulator has three rotational frames, namely, outer frame, middle frame, and inner frame.
Table 7 and
Table 8 summarize the technical parameters of tri-axial flight simulator and the characteristics of the IMU in the optimized SSINS, respectively.
The comparison of the parameters of the sensors in the two tables in
Table 1 and
Table 8 shows that the gyro on the roll axis is reduced by ± 150°/s through the optimized design range of the SSP, and the performance parameters of the sensor are also improved. Due to the decrease in the roll angular rate of the SSP, the centrifugal force of the
X and
Y axes is reduced, so the
X,
Y axis acceleration measurement range is changed from 2.5 g to 0.85 g. It can be seen from the above that the small range sensor’s error is smaller than the larger one, so the use of a small range sensor effectively helps to improve the navigation accuracy.
In order to verify the effect of the SSINS before and after optimization, the comparison experiment is performed under the same experimental conditions. First, the isolation rotation comparison experiment is performed to compare the tri-axial angular rate of the SSINS before and after the optimization. Then, the comparison experiment of the roll angle calculation accuracy is carried out. The roll attitude angle measured before and after the optimization was compared with the feedback value of the flight simulation turntable roll angle, and the two difference values were compared.
The experiment conditions are set as shown in
Table 9. In the above two experiments, the SSINS’s pitch and yaw angle provided by high-precision tri-axial flight simulator are same.
The unoptimized system and the optimized system were installed on the flight simulator and the experiments were carried out. The scene of the flight simulation experiment is shown as
Figure 13. The experiment conditions are set as
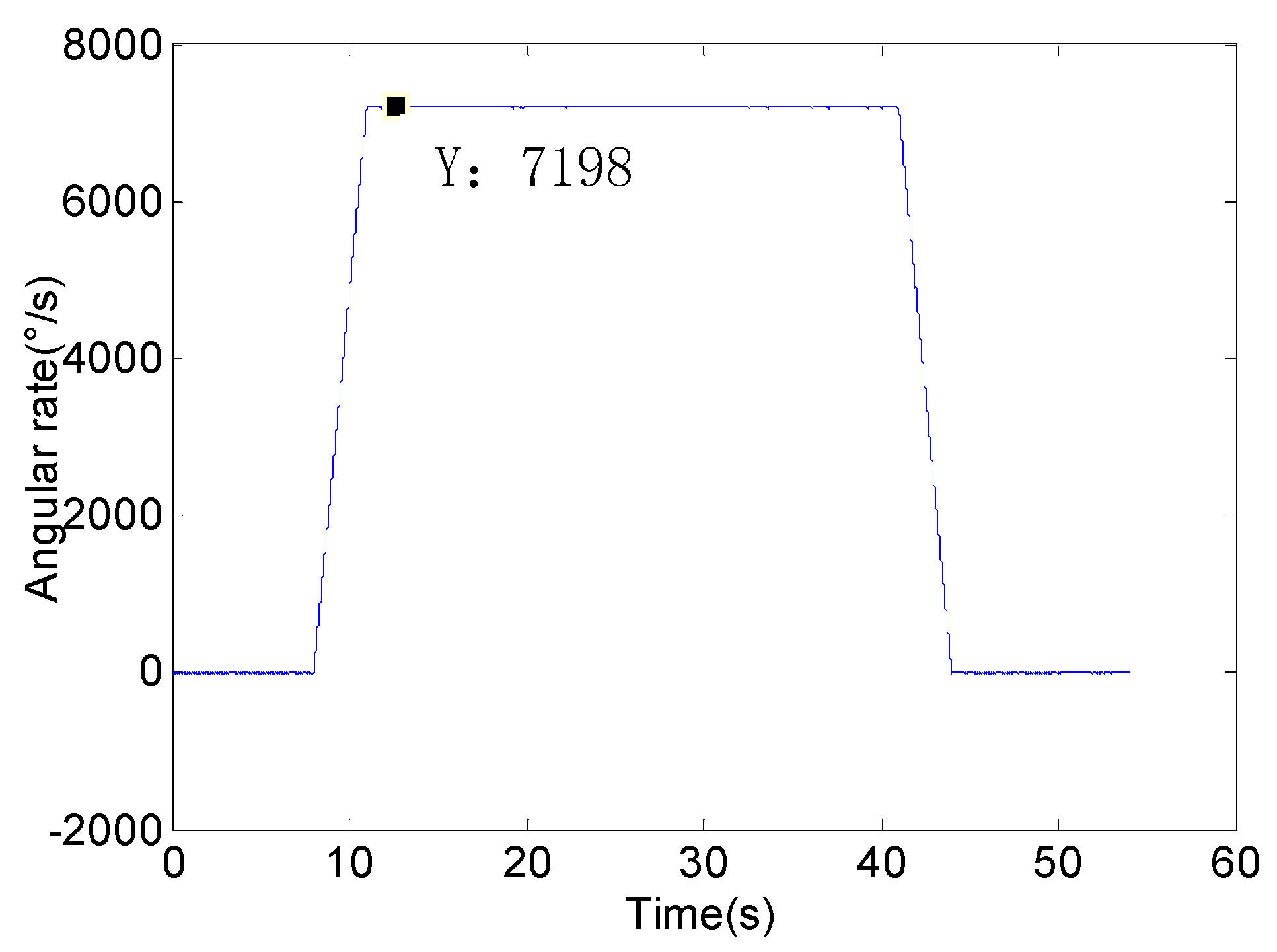
Table 9. We set the rotational speed of the flight simulator is 20 r/s and the pitch angle is 2°. The feedback angular rate of flight simulation turntable is shown in
Figure 14. The system experiment data is solved by the same procedure and SSP attitude information can be obtained.
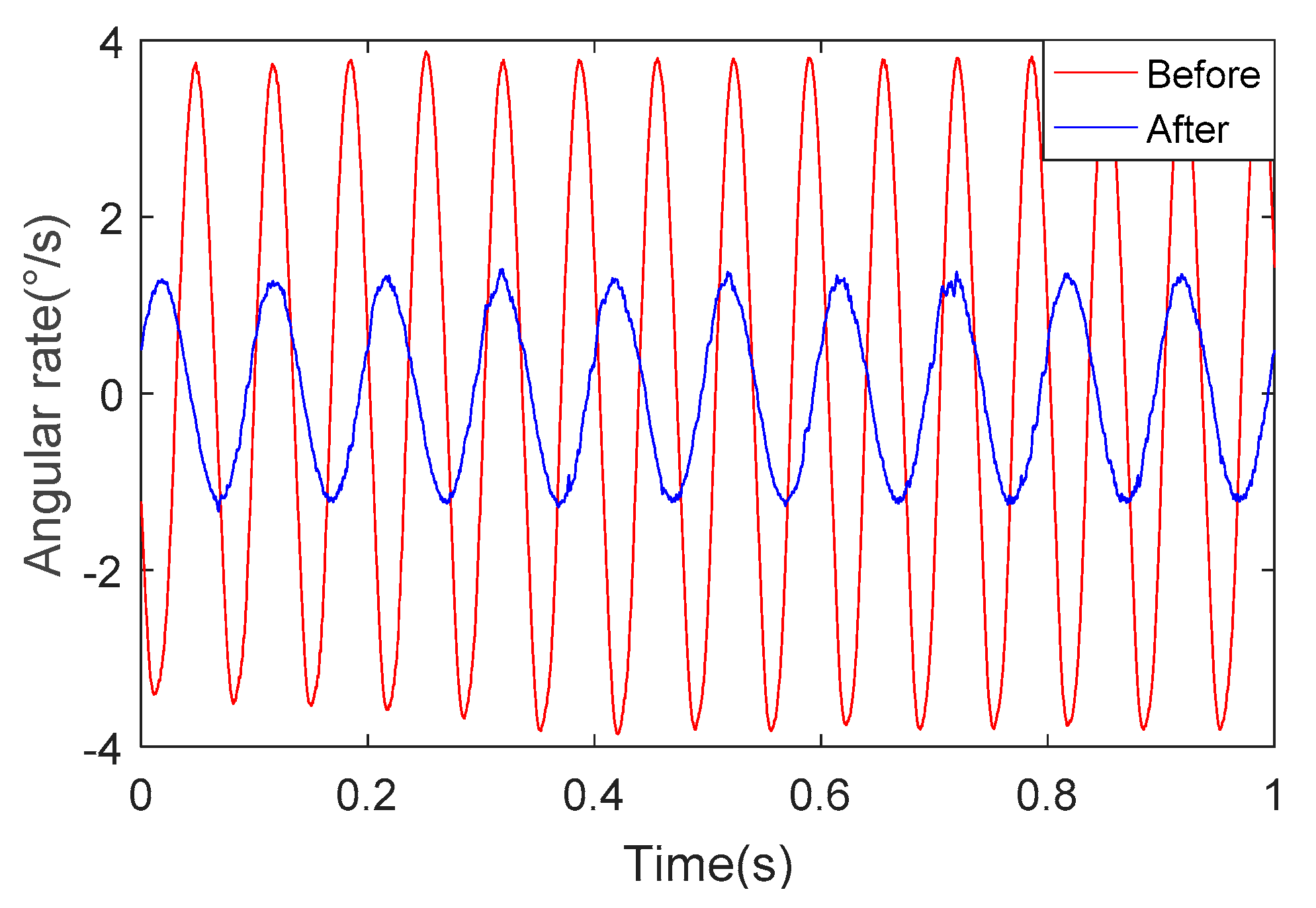
Figure 15 depicts the change of roll angular rate for the unoptimized and optimized systems under the same experimental conditions. We can determine from
Figure 15 that the roll angular rate of the SSP after optimization is about 1/3 of the angular rate of the SSP before optimization. This shows that the SSP after optimization has better stability and ability to isolate the high-rotational motion of the missile body.
We can see from
Figure 16 and
Figure 17 that the angular rate of the SSP after optimization is about 1/3 of the angular rate of the SSP before optimization. This once again proves the superiority of the optimized SSP.
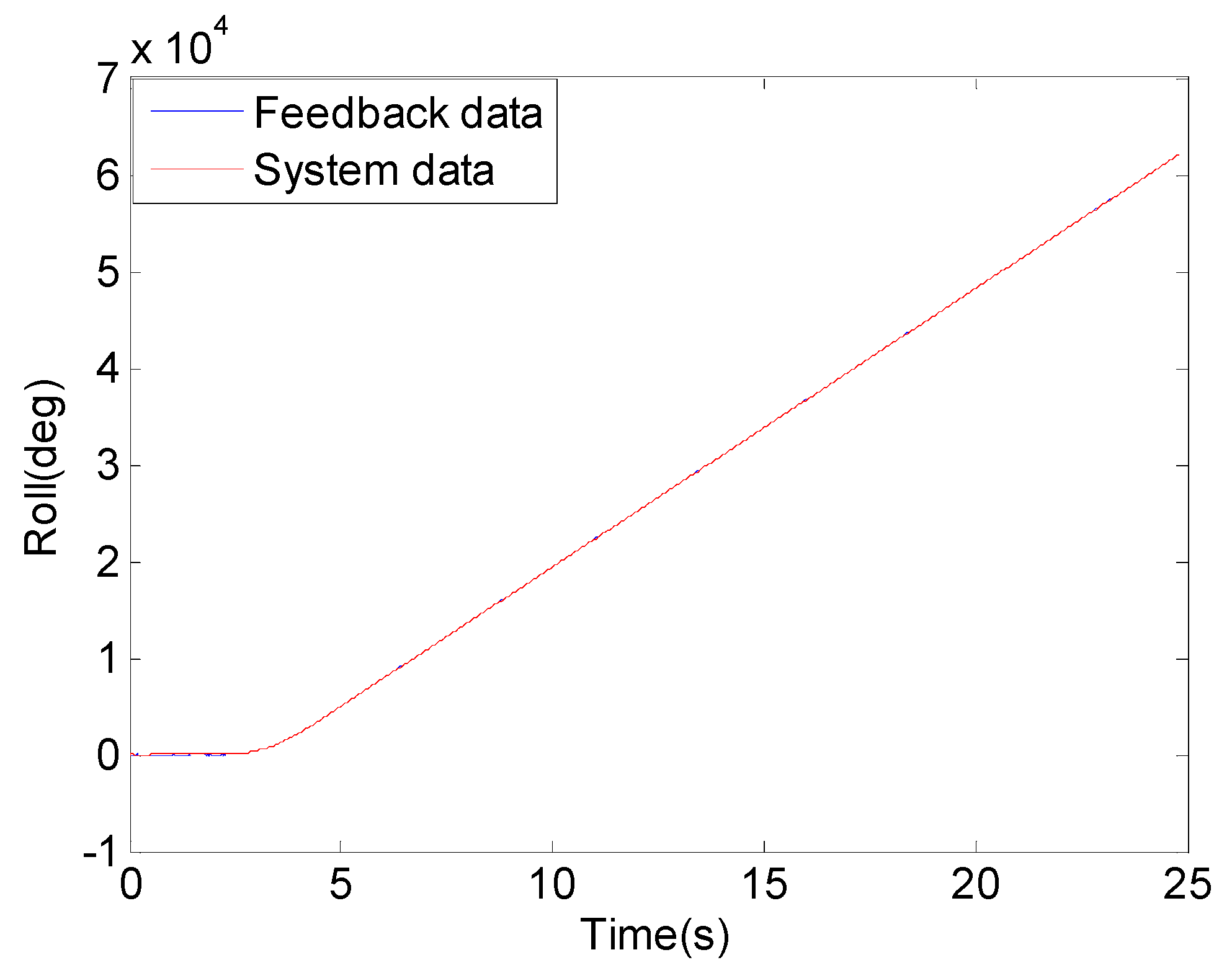
Figure 18 describes the change in roll angle over time, the blue curve represents the feedback value of roll angle of flight simulation turntable and red curve represents the measured roll angle of the optimized system. We can see from the
Figure 18 that the change trend of the two curves is the same.
Figure 19 shows the difference between the roll angle measured by the system and the roll angle of the flight simulator. The red curve represents the difference between the roll angle measured by the system before optimization and the feedback value of the roll angle of the flight simulator. The blue curve represents the difference between the roll angle measured by the system after optimization and the feedback value of the roll angle of the flight simulator. After comparison, it was found that since the SMINS used a small range sensor after optimization, the error of the solution was reduced to 60% of the system that used a wide range sensor. Through the flight simulation turntable experiment, the practicability and effectiveness of the proposed method in actual application was illustrated.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}