1. Introduction
Multiple-sensor data fusion has attracted significant attention in the information fusion field. It can be mainly divided into two types, namely centralized data fusion and distributed data fusion. In a centralized data fusion system, sensing information (raw sensing data) observed by local sensors is delivered directly to the fusion center (FC) through single hop or multiple hops. The FC collects all the data while carrying out the computations and makes a final decision. A centralized data fusion system can get optimal detection performance due to the small loss of information. However, it is at the cost of a large bandwidth and a heavy computing burden of the FC, which increases the system’s communication costs and shortens the system’s lifetime. Communication costs mainly include the cost for the sensors used in the sensing system, the communication bandwidth required by the system, which determines the number of bits that could be transferred by sensors, and all the energy consumption of data transmission. Compared with centralized data fusion, distributed data fusion has been studied more for several decades because it bears the advantages of higher reliability, smaller communication costs, higher survivability, and shorter decision time than centralized data fusion. In a distributed fusion system, each local sensor makes a local decision based on its own observation and transmits it to the FC. Then, the FC combines all local decisions into a final global decision by using an optimal decision rule or a suboptimal decision rule [
1,
2].
There are three basic fusion topology architectures in the distributed detection system, namely parallel topology [
3,
4], serial topology [
5,
6,
7], and tree topology [
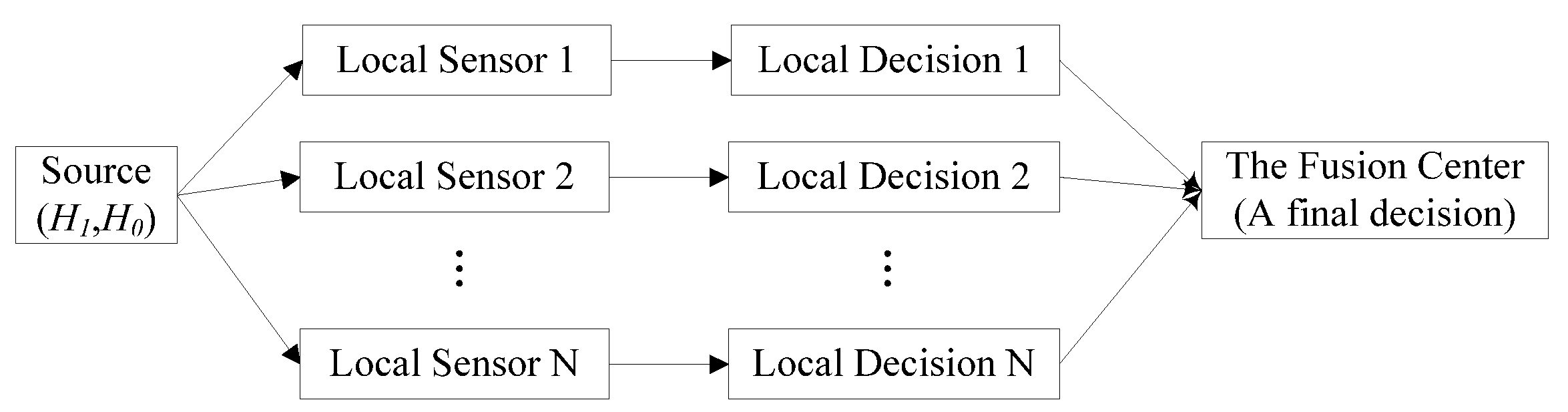
8]. For the serial topology and tree topology, the main disadvantage of them is that any local sensor’s failure would result in the whole system’s failure. However, for parallel topology, one or several local sensors’ failure would not affect other local sensors because that each local sensor works independently. Therefore, we adopt the distributed detection system with the structure of parallel topology, whose typical structure is shown in
Figure 1, in this paper.
In the distributed detection system with multiple sensors, there are two ways for local sensors to deliver their local decisions to the FC: a one-bit hard decision and a multiple-bit soft decision. For a hard decision, only one bit is transmitted to the FC. Usually, Bit 0 represents the absence of the target and Bit 1 represents the presence of the target. It needs less bandwidth and reduces the system’s communication costs but loses a lot of sensing data information and restricts the improvement of the system’s detection performance [
9,
10,
11]. In fact, a multiple-bit soft decision can be transmitted within the system’s communication capability. A Bayesian model has been proposed in Reference [
12], in which each local sensor delivers a probability that represents its confidence in its decision to the FC. Then, the FC combines all the probabilities into a global decision. Thomopoulos et al. proposed a soft decision scheme in which a two-bit soft information was delivered by each local sensor to the FC [
13]. The two-bit soft information not only contains one-bit hard decision information regarding the presence of the target but also contains one-bit of quality information. In Reference [
14], Lee and Chao proposed a multiple-bit soft fusion scheme based on subpartitioning of the local decision space. In Reference [
15], Aziz proposed a multilevel quantization and fusion approach based on fuzzy techniques. However, most of those proposed methods are computationally complex, especially with multilevel quantization, and they did not take the non-ideal communication channel into consideration. In Reference [
16], the author optimized the number of reporting bits to maximize the network’s throughput in quantized cooperative spectrum sensing. In Reference [
17], the number of reporting bits and the combining weight were jointly optimized to maximize the probability of detection. Therefore, inspired by References [
14,
15], we propose a simple, easy to calculate, and efficient soft decision fusion method based on the subpartitioning of the local decision space and considers the non-ideal communication channel. In addition, to get a tradeoff between communication costs and detection performance, we also propose a soft–hard combination decision fusion scheme (SH-DFS) for the distributed detection system.
Clustering techniques have been widely studied and used in the distributed detection system [
18,
19,
20,
21,
22,
23]. They can not only reduce the system’s energy consumption but also extend local sensors’ and the system’s lifetime. In the clustered distributed detection system, every cluster has a cluster head (CH) and each local sensor belongs to a cluster. First, each local sensor delivers its decision to its corresponding CH. Then, each CH makes its own decisions according to the received data and delivers it to the FC. Finally, the FC fuses the received information and makes a final decision. There are numerous methods for CHs selection and clusters formation proposed by previous studies. In Reference [
24], the authors proposed an easy method for CHs selection, in which each local sensor has an equal probability to be CH. In the cluster head election mechanism using fuzzy logic (CHEF), CHs are selected based on two parameters, which are proximity distance and energy [
25]. In Reference [
26], the energy efficient structured clustering algorithm (EESCA) is proposed, in which CH is elected based on average communication distance and lingering energy. In Reference [
27], the author proposed adaptive dynamic clustering (ADC) to minimize the cluster head and improve the network’s routing problem. In this paper, we select CHs by using a fuzzy logic system (FLS), in which the remaining energy and distance to the FC are considered to compute the likelihood to be a CH for each local sensor. After selecting CHs, clusters are formed by using the fuzzy c-means clustering algorithm because that the fuzzy c-means clustering algorithm has a more accurate and natural description of data [
11].
In this paper, we propose a soft–hard combination decision fusion scheme for the clustered distributed detection system with multiple sensors. First, an FLS is designed to select a CH, in which the remaining energy and distance to the FC are considered to compute the likelihood to be a CH for each local sensor. Then, the fuzzy c-means clustering algorithm is used for forming clusters. In every cluster, soft decision fusion based on the subpartitioning of the local decision space is applied. Every local sensor delivers its multiple-bit decision, which not only contains its decision but also contains its degree of confidence on that decision to its corresponding CH. CH combines all received data into a one-bit hard decision under the Neyman–Pearson criterion. Between clusters, the FC combines all cluster heads’ one-bit hard decisions into a final global decision by using an optimal fusion rule. In comparison with previous approaches, the novelty and contributions of this paper are summarized as follows:
We propose a soft–hard combination decision fusion scheme, which not only makes use of soft decision fusion but also makes uses of hard decision fusion. This scheme can get a tradeoff between communication costs and detection performance.
In every cluster with soft decision fusion, a simple, easy to calculate, and efficient soft decision fusion method based on the subpartitioning of the local decision space is applied. Multiple bits that not only contain a local sensor’s decision but also contain its degree of confidence on that decision are delivered. At the same time, compared with References [
14,
15], our soft decision fusion method simplifies the calculation of CHs.
The non-ideal communication channel is taken into consideration.
In the FC, an optimal fusion rule is applied to fuse all decisions form all clusters.
The paper is organized as follows.
Section 2 shows the design scheme of the clustered distributed detection system. Then, the soft decision fusion scheme in clusters based on the subpartitioning of the local decision space is presented in
Section 3.
Section 4 shows the hard fusion scheme with an optimal fusion rule. Simulation results and performance evaluations are presented in
Section 5.
Section 6 concludes this paper.
2. The Design of Clustered Detection System
We consider a distributed detection system consisting of N local sensors. We design the FLS to select CHs and use the fuzzy c-means clustering algorithm for clusters formation. In addition, the clustered distributed detection system can be dynamically reconfigured in every round.
2.1. The Design of Fuzzy Logic System
In the distributed detection system, CHs not only need to fuse multiple-bit soft information in clusters but also need to send one-bit hard information to the FC. Therefore, CHs must have sufficient energy and be close to the FC. Therefore, two antecedents, including every local sensor’s remaining energy and distance to the FC, are considered to design the FLS. Therefore, two antecedents of a local sensor are considered in our designed FLS:
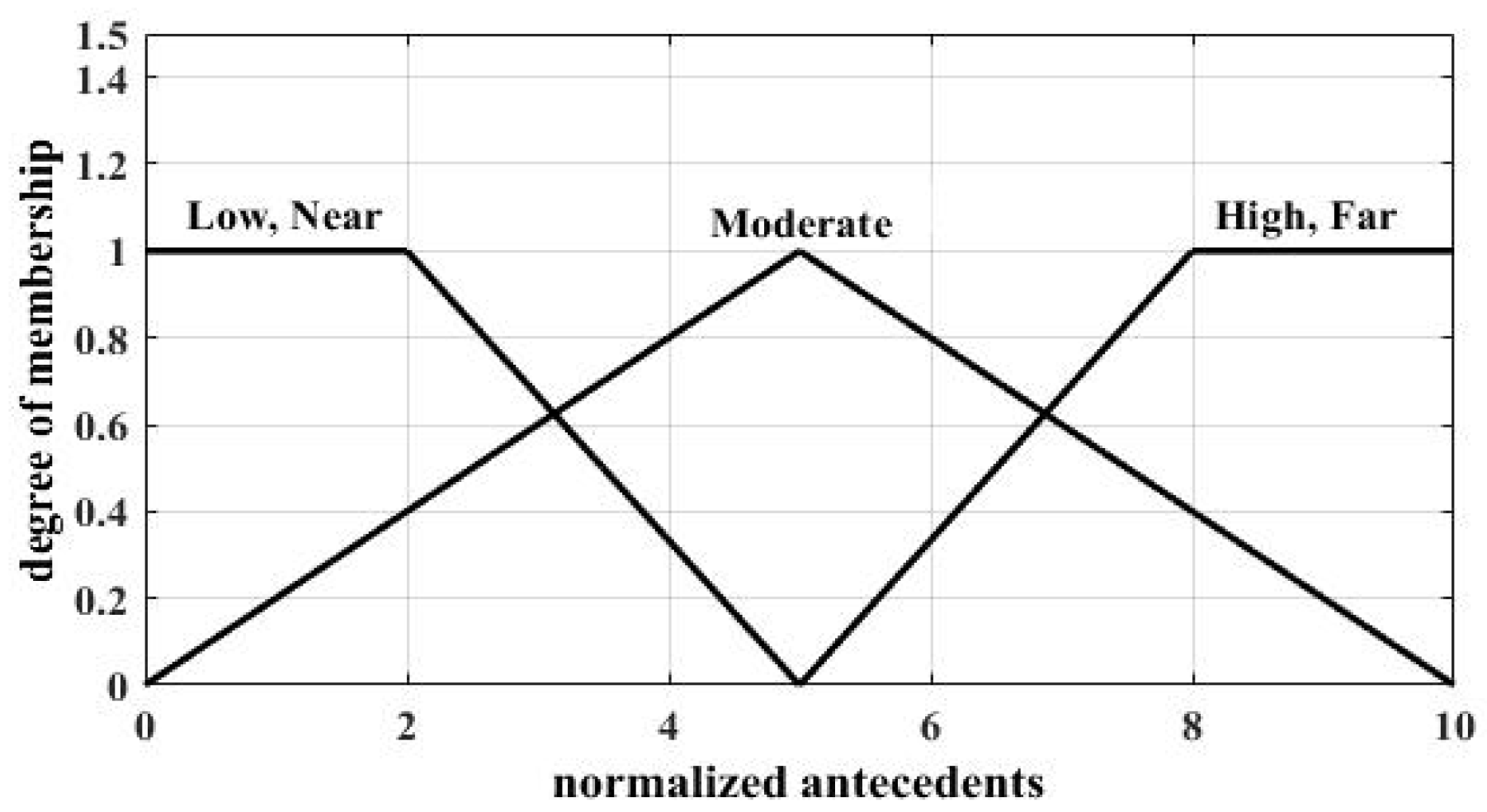
The linguistic variables used to represent antecedent 1 are divided into three levels: low, moderate, and high; and those to represent antecedent 2 are also divided into three levels: near, moderate, and far. Two antecedents use the same kind of membership functions (MFs), and in this paper, MFs for normalized antecedents are shown in
Figure 2. Two antecedents as the input of MFs have been normalized to [0, 10]. The linguistic variables, which are used to represent the consequent and denote the possibility that a local sensor will be selected as a CH, were divided into five levels: very small, small, medium, large, and very large. In this paper, MFs for normalized consequents are shown in
Figure 3.
Based on the fact that an ideal CH should have sufficient energies and be close to the FC, we design our FLS using rules for every input (x1, x2) like:
R
l: IF the remaining energies of a local sensor (
x1) is
, and its distance to the FC (
x2) is
, THEN the possibility that this local sensor will be selected as a CH(
y) is G
l, where l = 1, …, 9. Nine rules are summarized in
Table 1.
For every input (
x1,
x2) of each local sensor, the output is computed using:
According to the output, which is the probability of a local sensor selected as a CH, we can select M local sensors with the highest probabilities as CHs. M is the number of CHs, and it can be obtained using:
where p is a constant ratio decided by people and represents the proportion of CHs in all sensors, and N is the total number of local sensors in the distributed detection system.
2.2. The Fuzzy c-Means Clustering Algorithm
After selecting CHs by using FLS, the fuzzy c-means algorithm for clustering is used for forming clusters. Compared with hard clustering, in which every local sensor only belongs to one cluster, FCM has a more accurate and natural description of data. Let {xi, i = 1, 2, …, N} be the set of N local sensors, and xi represents the ith local sensor. M is the number of CHs computed by Equation (2) and is also the number of clusters in the system.
The fuzzy c-means algorithm is an improvement of the c-means algorithm [
28]. The c-means algorithm is based on minimizing the following objective function, which represents the mean-square error:
where
Cj represents the cluster of
j,
mi is the center of
Ci, and
y(
y∈
Cj) represents all local sensors in
Cj. Different from the c-means algorithm, the fuzzy c-means algorithm is based on minimizing the following objective function under one restriction function:
where
mj is the center of cluster
j,
is the membership of the
ith local sensor in cluster
j, and b is a constant that can control the degree of blurring of clustering results. If
b→1, clusters formed by the fuzzy c-means algorithm is similar to those formed by c-means. If
b = ∞, the fuzzy c-means algorithm will get a completely fuzzy solution, which means every node belongs to each cluster with equal probability, but it does not bear the meaning of clustering. Generally, let
b = 2. In addition, the fuzzy c-means algorithm requires that the sum of the memberships of one node for each cluster is 1, which is illustrated by Equation (4).
The solution of Equation (4) can be obtained by optimizing
and update
mj according to Equation (5) through an iterative method:
The specific description of clusters formed by FCM is illustrated in Algorithm 1.
| Algorithm 1 Clusters formation by FCM |
Input: xi, i = 1, 2, …, n; M; b; μj(xi); max_iteration_num
M: the number of clusters and obtained by Equation (2).
b: b = 2.
μj(xi), j = 1, 2…, M, and i = 1, 2…, N: the initialized membership values.
max_iteration_num: the maximum number of iterations. |
| Output: , which is the membership of each node belonging to each cluster for the kth iteration. |
Iteration Process:
|
3. Soft Decision Fusion Based on the Subpartitioning of the Local Decision Space in Clusters
We consider the binary detection in the clustered distributed detection system. In binary detection, there are two hypotheses:
H0 represents the absence of the target (the signal) and
H1 represents the presence of the target (the signal). The FC makes a global binary decision (0 or 1) by processing local decisions received from all local sensors. It is the hard decision fusion when each local sensor makes a binary hard decision (0 or 1) and delivers it to the FC. Conversely, it is the soft decision fusion when each local sensor delivers a multiple-bit decision to the FC. In this paper, we apply soft decision fusion in clusters formed by
Section 2 and apply hard decision fusion between clusters. The proposed clustered detection system is shown in
Figure 4.
We assume that there are N local sensors in the distributed detection system. By using the FLS and the fuzzy c-means clustering algorithm in
Section 2, M clusters are formed. In the
mth cluster, there are
nm local sensors and
cm is the CH in it. N =
n1 +
n2 + … +
nM. We take the
mth cluster for example.
In the
mth cluster, let
y1,
y2, …,
ynm be the statistically independent observations of
nm local sensors and have known probability distributions under both hypotheses (
H0 and
H1). For the
kth local sensor in the
mth cluster,
Tk is the sensor’s threshold determined by the probability of false alarm of the
kth local sensor, and
Lk(
yk) is the likelihood ratio test at the
kth local sensor, which is given by:
If a local decision
uk is a one-bit hard decision, then the associate decision space
k is partitioned into two exclusive regions,
and
, such that:
Furthermore, we have a probability of detection (
Pdk) and a probability of false alarm (
Pfk) for the
kth local sensor:
To improve the detection performance, a b-bit (b ≥ 2) soft decision can be obtained, in which b is determined by the communication capability of the system. Its essence is the subpartitioning of the and space. For illustration purposes, the 2-bit soft decision case is considered.
In the 2-bit soft decision case, and are partitioned into two exclusive regions respectively.
The quantization rule and decision rule
where:
The subpartitioning in the 2-bit decision case is shown in
Figure 5.
Corresponding to Equation (7), we also have:
To simplify the calculation, we let the subpartition satisfy Equation (11) according to the probability of detection and the probability of false alarm:
According to the knowledge of the kth local sensor’s probability of false alarm and the signal-to-noise ratio (SNR), which is defined as the ratio of signal power to the noise power, we can get Pdk and the range of sub-spaces.
Let t0 be the threshold between and , t1 be the threshold between and , and t2 be the threshold between and , then the calculation of the kth local sensor’s thresholds (t0, t1, t2) in the 2-bit soft decision case is summarized using two steps. Step 1: Given the false alarm probability of the kth local sensor Pfk, then t1, which is not only the threshold between and but also the threshold between and , can be obtained under the Neyman–Pearson criterion. Pdk can be obtained using t1.
Step 2: Then, we can calculate t0 by making Pf10k = Pf11k = Pfk/2, and calculate t2 by making Pd10k = Pd11k = Pdk/2.
Considering that the communication channel is non-ideal without memory, we assume that the bit error rate of the
kth local sensor is
Pek , which is the same for every bit. Then, for the
kth local sensor, the probability of the bit being transmitted correctly is 1 −
Pek. In the 2-bit decision case, the station transition diagram is shown in
Figure 6. We can obtain that the probability of a 2-bit soft decision being transmitted correctly by the
kth local sensor is (1 −
Pek)
2, the probability of one bit being transmitted wrongly is
Pek(1 −
Pek), and the probability of two bits all being transmitted wrongly is (
Pek)
2. Then, we can get the possible transition matrix of
Figure 6:
Let
Um = (
u1,
u2, …,
unm) be the decision vector of all local sensors in the
mth cluster. The optimal decision rule for the CH in the
mth cluster (
cm) is as follows:
where
Tm is the
mth cluster’s threshold and is determined by the probability of the CH’s false alarm and λ is a randomization parameter.
Assuming independence between local sensors, the likelihood ratio in the
mth cluster is given using:
where:
Therefore, the probability of a false alarm and the probability of detection of the CH can be obtained using:
and:
According to the probability of a false alarm of local sensor cm (CH), we can obtain Tm and λ. Then, the probability of detection of the CH can be obtained using Equation (16).
To get a binary decision in the
mth cluster when knowing
Tm and λ after calculation, we can follow:
In the same way, for a
b-bit soft decision,
bn = 2
(b−1) − 1, the quantization rule and decision rule:
where
Binary() is the data in binary form and:
Corresponding to Equation (11), we let the subpartition satisfy Equation (19) according to the probability of detection and the probability of false alarm:
The possibility transition matrix is as follows:
5. Simulation and Results
In this section, we present the performances of the clustered distributed system with the proposed SH-DFS using Monte Carlo simulation results. We assumed that local sensors with random initial energy from 0.1 to 0.5 J/battery were randomly deployed in an area with dimensions 100 m × 100 m. The FC was at (50 m, 50 m). In addition, we made the kth local sensor’s probability of false alarm Pfk ~ U(0.0, 0.2). The probability of error bit Pek in the non-ideal channel was assumed to be 0.05, and it was the same for each local sensor for convenience.
For the
kth local sensor, its observation
yk followed a Gaussian distribution:
where
E(
N) is the mean value of noise,
E(
S +
N) is the mean value of signal and noise, and
σ2 is the variance of the Gaussian noise.
5.1. Energy Consumption
Figure 7 illustrates the energy consumption of the distributed systems with the conventional hard decision, SH-DFS, the conventional soft decision, and the centralized system. In this paper, the conventional hard decision was that each local sensor made a one-bit hard decision according to its observation and transmitted it to the FC under the non-ideal channel; then, the FC combined all decisions from local sensors into a global decision. In addition, the conventional soft decision in this paper was that each local sensor made a multi-bit decision according to its observation and transmitted it to the FC under the non-ideal channel; then, the FC combined all decisions from local sensors into a global decision.
Figure 7 shows the comparisons of four different systems by using the number of alive nodes with the round increasing, in which Con/Hard represents the distributed system with the conventional hard decision, SH-DFS represents the distributed system with the proposed method in this paper, Con/Soft represents the distributed system with conventional soft decision, and the Centralized represents the centralized system.
We can find that the centralized system consumes the most energy because raw information was transmitted by all local sensors to the FC, although it has the optimal detection performance because there was little loss of information. Conversely, the system with a conventional hard decision consumed the least energy because the least information (a one-bit decision) was transmitted by all local sensors to the FC. The energy consumption in the proposed method mainly included the energy consumption for clustering in every round and the energy consumption for bits transmission. However, the conventional soft decision fusion mainly included energy consumption for bits transmission. On the surface, the proposed method consumed extra energy for clustering. However,
Figure 7 shows that the system with conventional soft decision fusion (a three-bit decision) consumed more energy than the system with the proposed method (a three-bit decision in the soft decision, M = 4). This is reasonable for two reasons. The first reason is that, in the system with the conventional soft decision fusion, every local sensor needed to transfer a soft decision to the FC. However, in the clustering network system with the proposed method, every local sensor only needed to transfer a soft decision to its corresponding CH, which had a shorter distance. In addition, those CHs only needed to transfer one bit to the FC in the proposed method. These help the system with the proposed method consume less energy for bits transmission. The second reason is that the cluster was reconfigured using FLS and the fuzzy c-means clustering algorithm in every round, which helped the system share the overload in all local sensors. Furthermore, it made the number of alive nodes in the proposed method be more than that in the conventional soft decision fusion method in every round.
5.2. Different SNRs
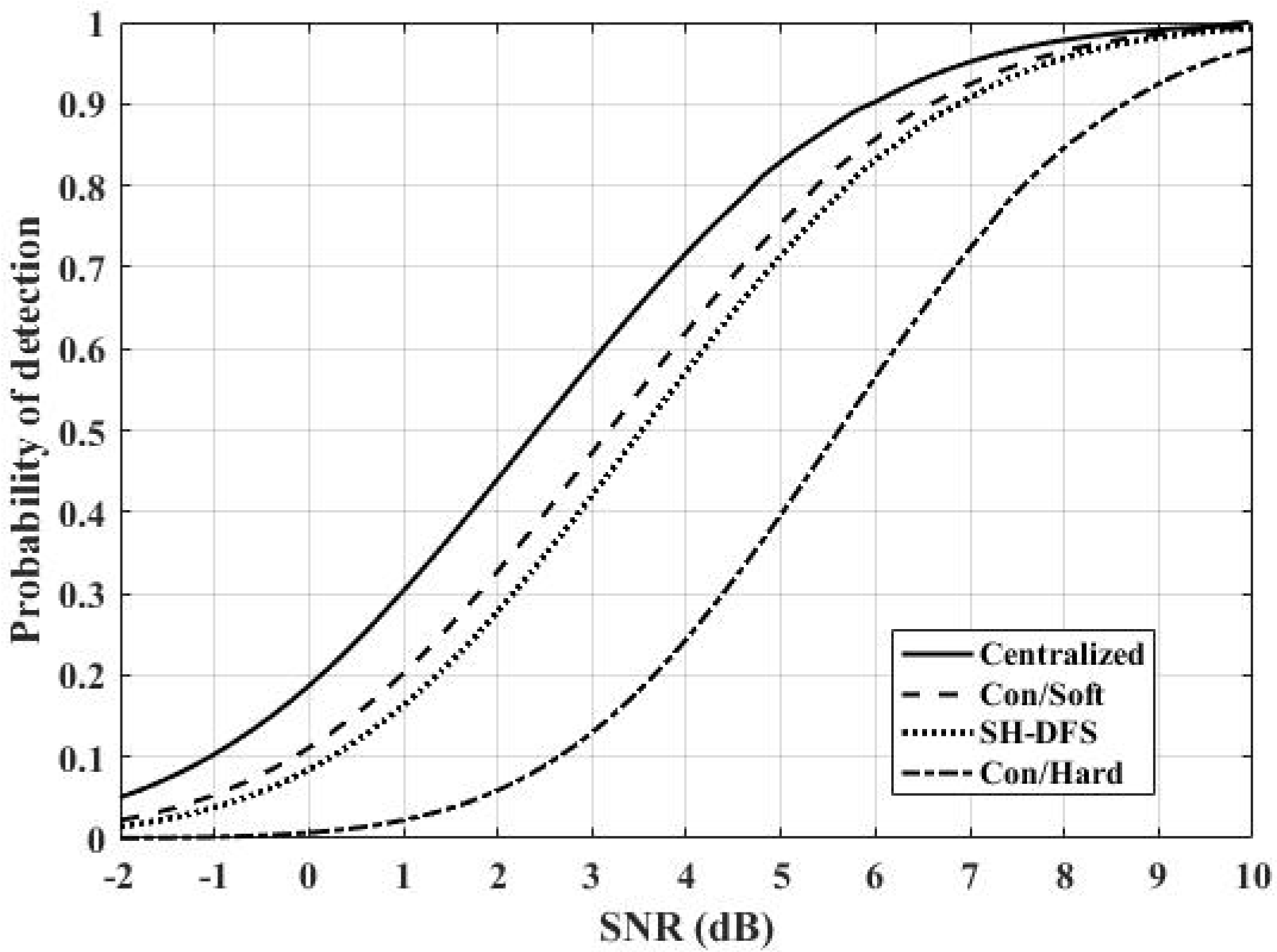
Performances were analyzed by using the probability of detection versus SNR. Here, let the desired global probability of false alarm at the FC be 0.01.
Figure 8 shows the comparison of the performances of the distributed systems with the conventional hard decision, SH-DFS, the conventional soft decision, and of the centralized system. Here, let the number of local sensors be 30. We found that the centralized system had the best performance because there was little loss of information in it. The system with SH-DFS (a two-bit decision, M = 4) significantly outperformed the system which only used a hard decision fusion (Con/Hard). In addition, although the system with the SH-DFS had similar performance with the system that only used soft decision fusion (a two-bit decision), it was better than the system with Con/Soft because it consumed less energy according to
Figure 7.
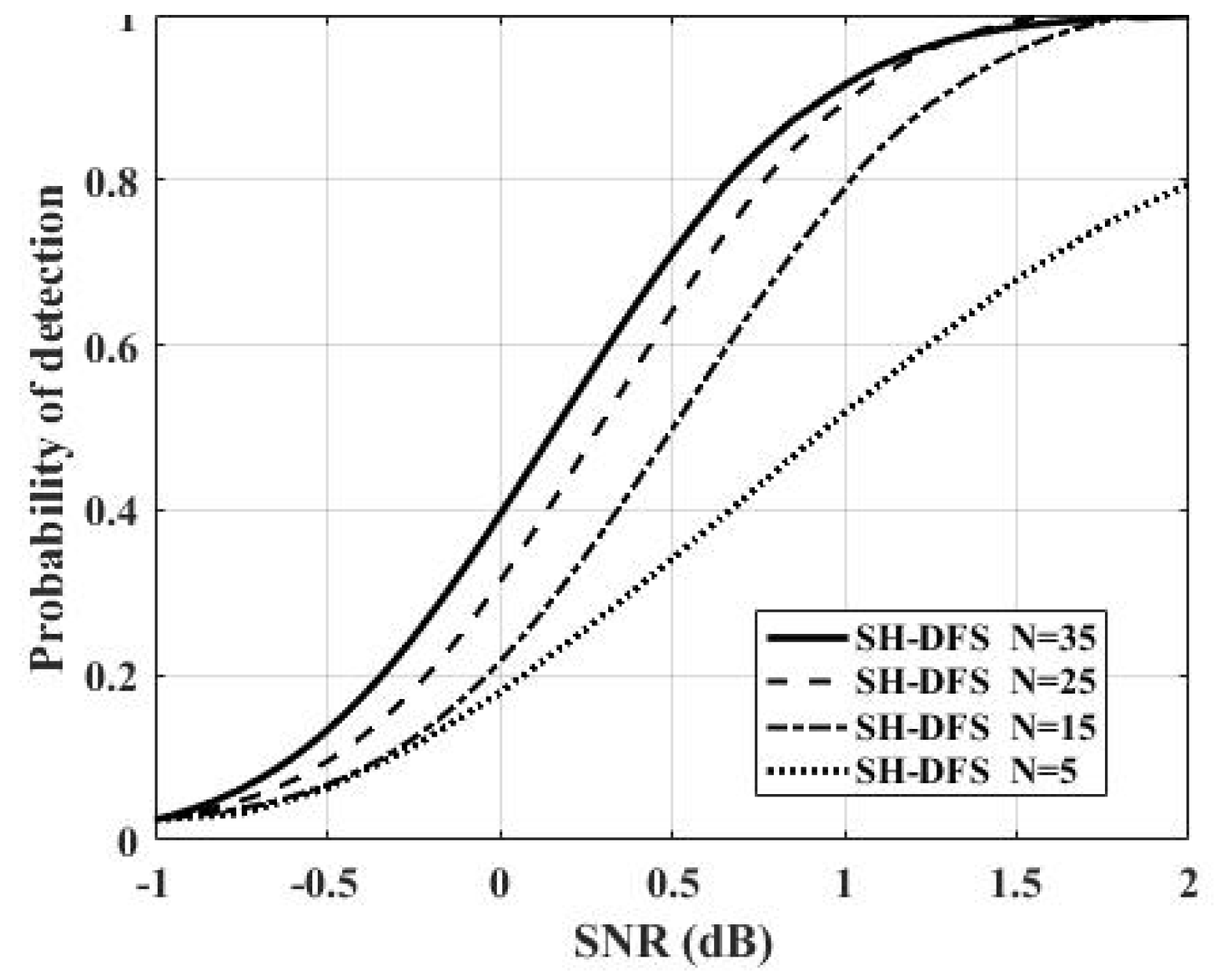
Figure 9 shows the comparison of the performances of the clustered distributed systems with SH-DFS (M = 4,
b = 2,
Pe = 0.05), but with a different number of local sensors. The number of local sensors was fixed at 5, 15, 25, and 35. From
Figure 9, we found that the number of local sensors had a smaller influence at a low SNR than that at a high SNR. Furthermore, the probability of detection increased with the number of local sensors increasing.
Figure 10 shows the comparison of the performances of the clustered distributed systems with SH-DFS (N = 30,
b = 2,
Pe = 0.05), but with a different number of clusters. We observed that with the rise of the cluster number, the probability of detection increased.
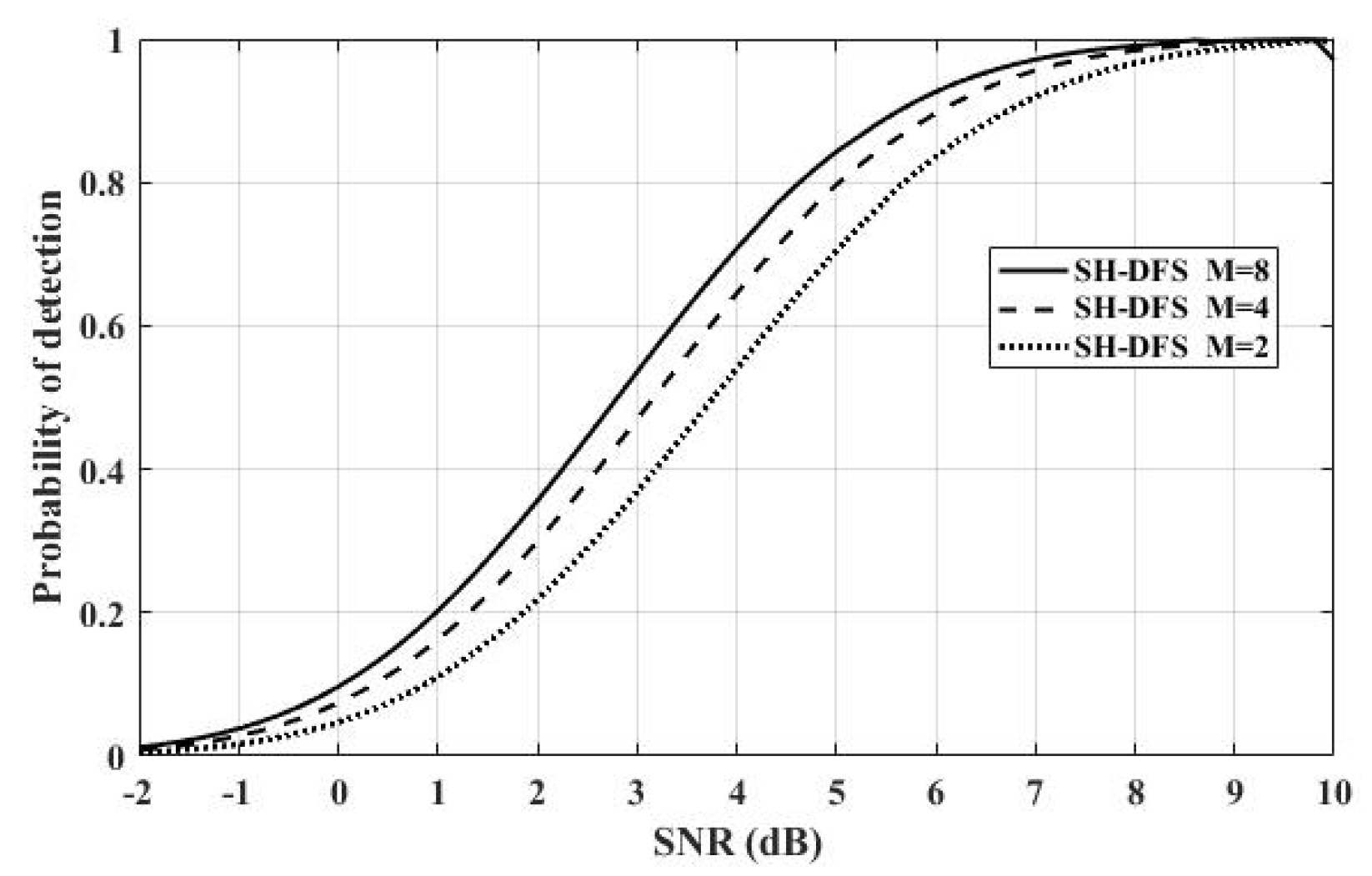
Figure 11 shows the comparison of the performances of the clustered distributed systems with SH-DFS (N = 30, M = 4,
Pe = 0.05), where
b is fixed at 2, 3, and 4. With
b increasing, which means more information was transmitted, the performance of the system with SH-DFS also increased. Compared with the centralized system, we found that the performance of the system with SH-DFS was close to the performance of the centralized system when
b was 3 or 4. Therefore, two-bit soft fusion or three-bit soft fusion can be applied to improve the performance of the Con/Hard, where only a one-bit decision is transmitted. At the same time, when we need to get a tradeoff between communication costs and detection performance, it is meaningless to let
b (the number of bits in b-bit soft fusion) be more than 4.
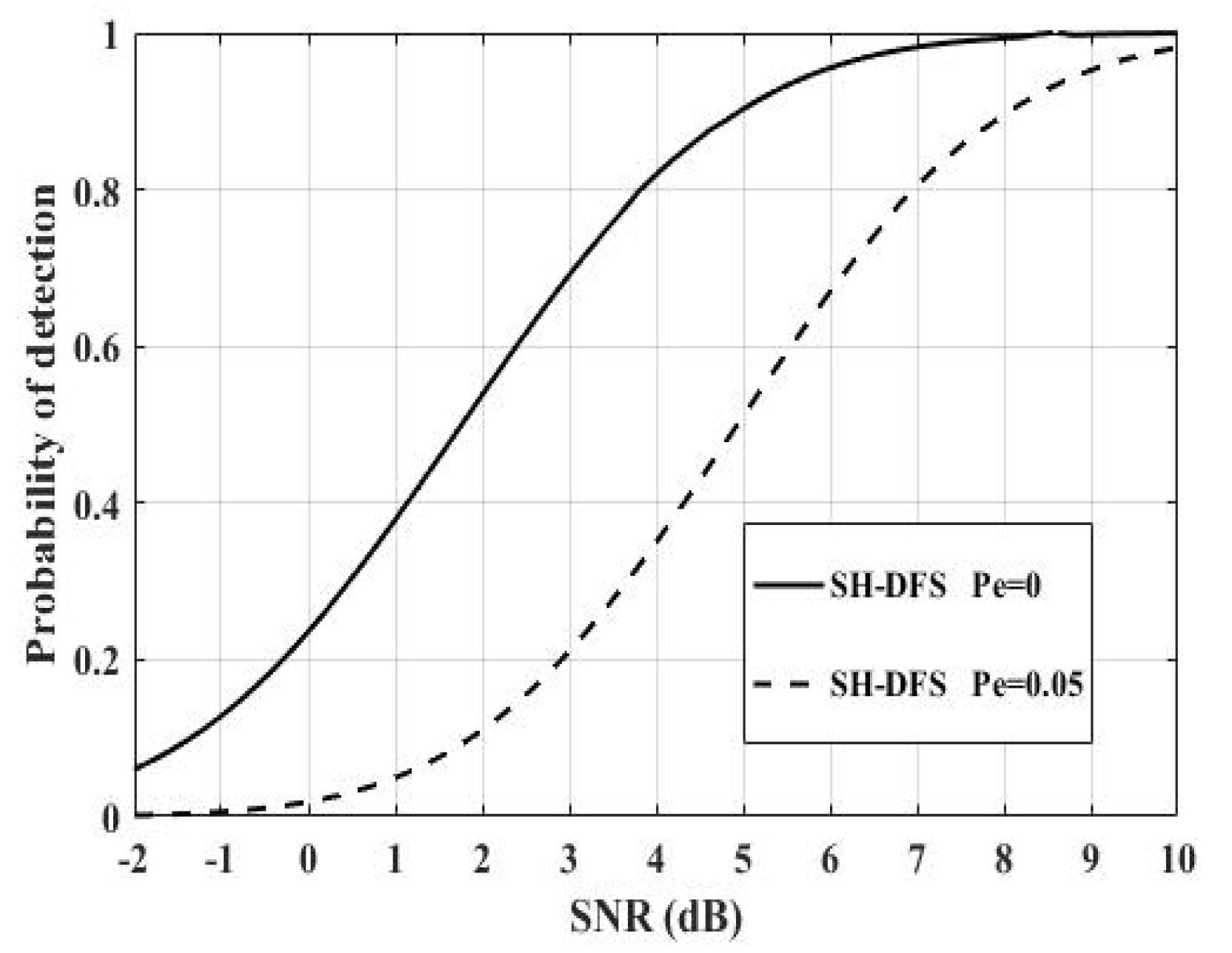
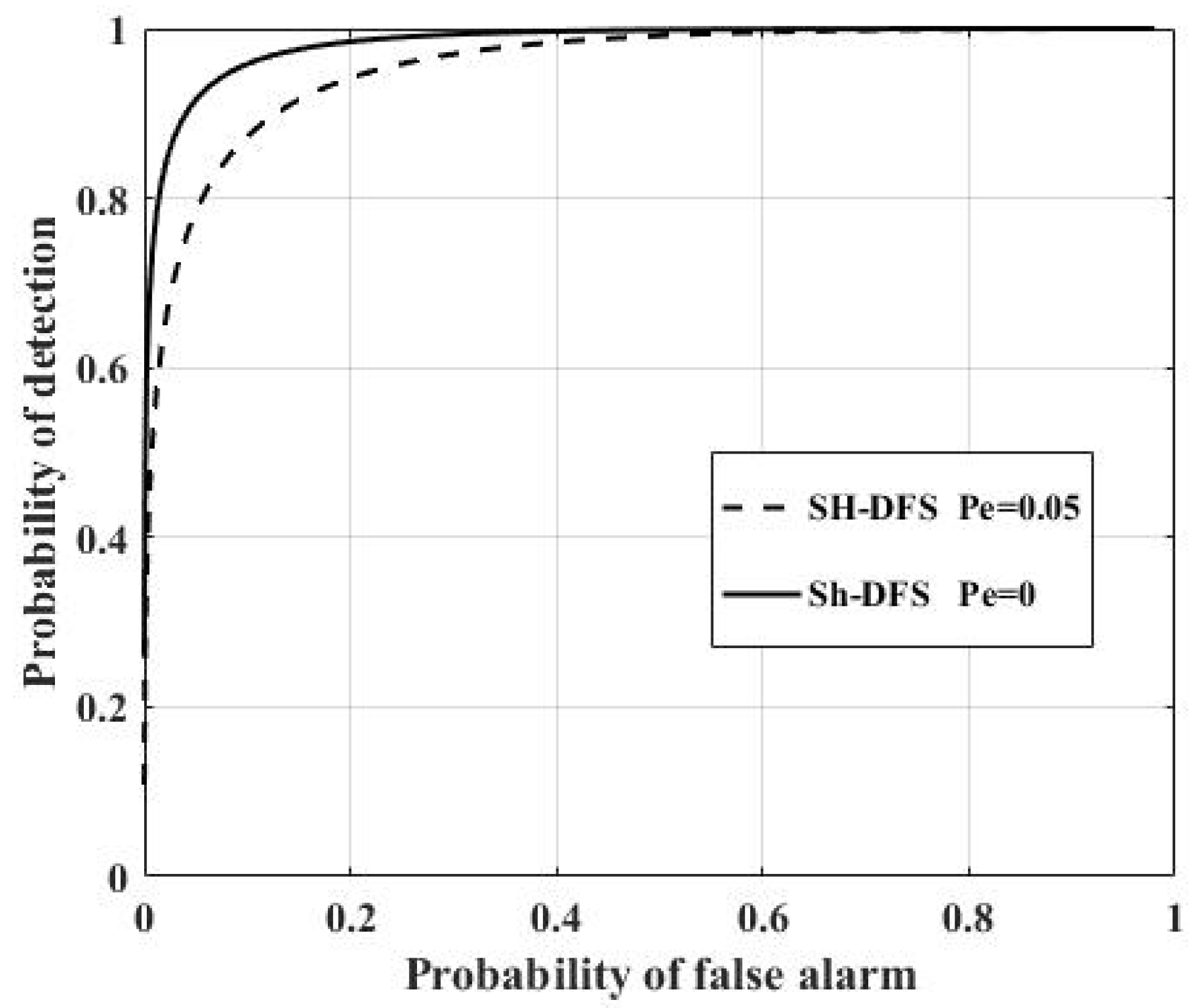
Figure 12 shows the comparison of the performances of the clustered distributed systems with SH-DFS (N = 30, M = 4,
b = 2), where
Pe = 0 and
Pe = 0.05 respectively. It was clear that the non-ideal communication channel had a negative influence on the clustered distributed system. It was necessary to take the non-deal communication channel into consideration.
5.3. Different Probabilities of the Desired Global False Alarm at the FC
Performances were analyzed by using the probability of detection versus the global desired probability of false alarm at the FC. Here, let SNR be 10 dB.
Figure 13 shows the comparison of the performances of the distributed systems with the conventional hard decision, SH-DFS, the conventional soft decision, and of the centralized system. Here, let the number of local sensors be 30. We found that the centralized system had the optimal performance. The system with SH-DFS (a two-bit decision, M = 4) significantly outperformed the system which only used hard decision fusion (Con/Hard). In addition, the system with the SH-DFS had a similar performance with the system that only used soft decision fusion (a two-bit decision).
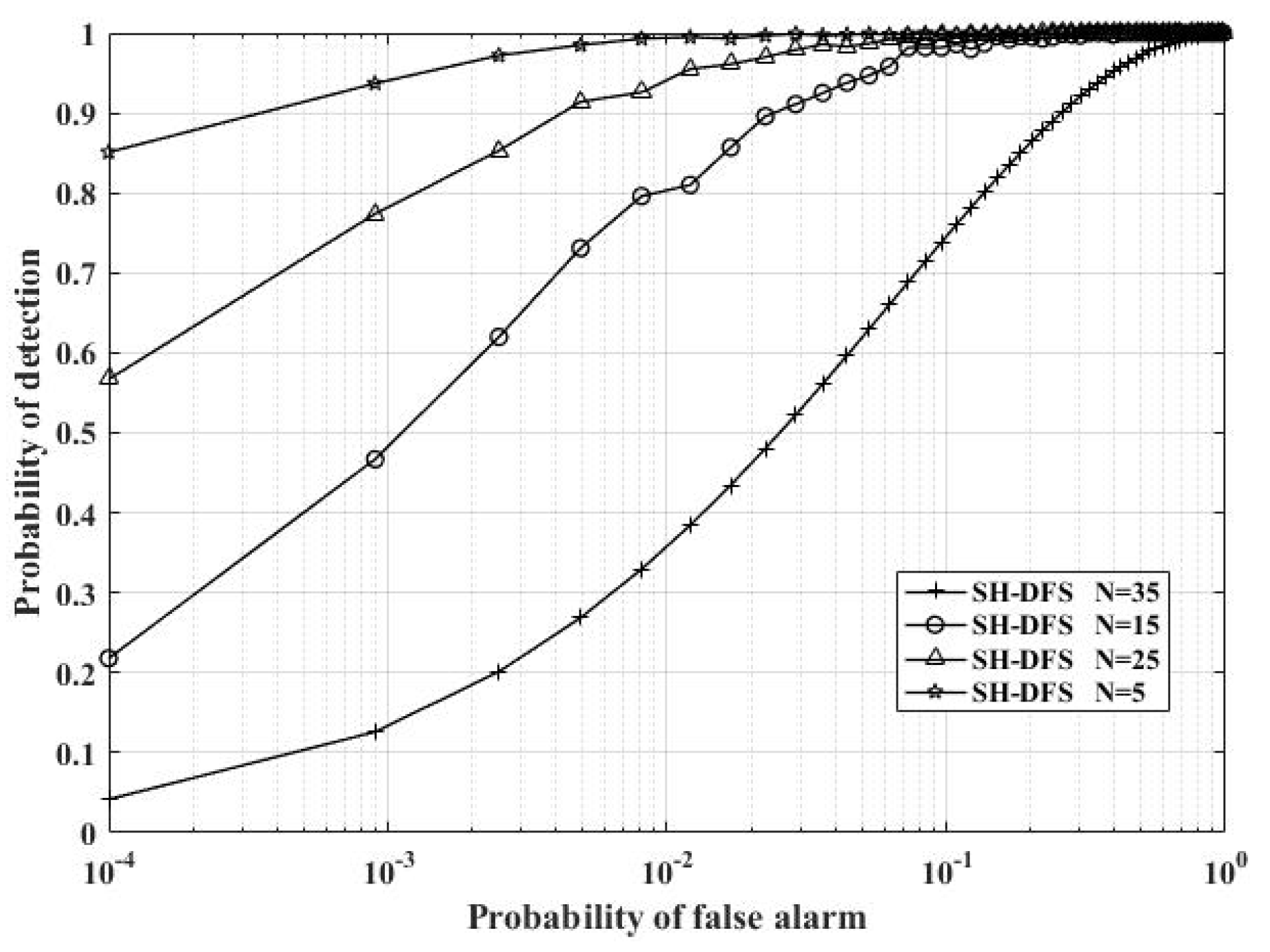
Figure 14 shows the comparison of the performances of the clustered distributed systems with SH-DFS (M = 4,
b = 2,
Pe = 0.05), but with a different number of local sensors. The number of local sensors was fixed at 5, 15, 25, and 35. It was clear that given the same SNR and the global desired probability of false alarm at the FC, the probability of detection increased along with the increase in the number of local sensors. Furthermore, it was also clear that given the same SNR and the number of local sensors, the probability of detection increased along with the increase of the global desired probability of false alarm at the FC.
Figure 15 shows the comparison of the performances of the clustered distributed systems with SH-DFS (N = 30,
b = 2,
Pe = 0.05), but with a different number of clusters. With the rise of the cluster number, the probability of detection was increased. However, for the system with 30 local sensors, when the cluster number changed from 2 to 4, its probability of detection had a more significant improvement than that when the cluster number changed from 4 to 8.
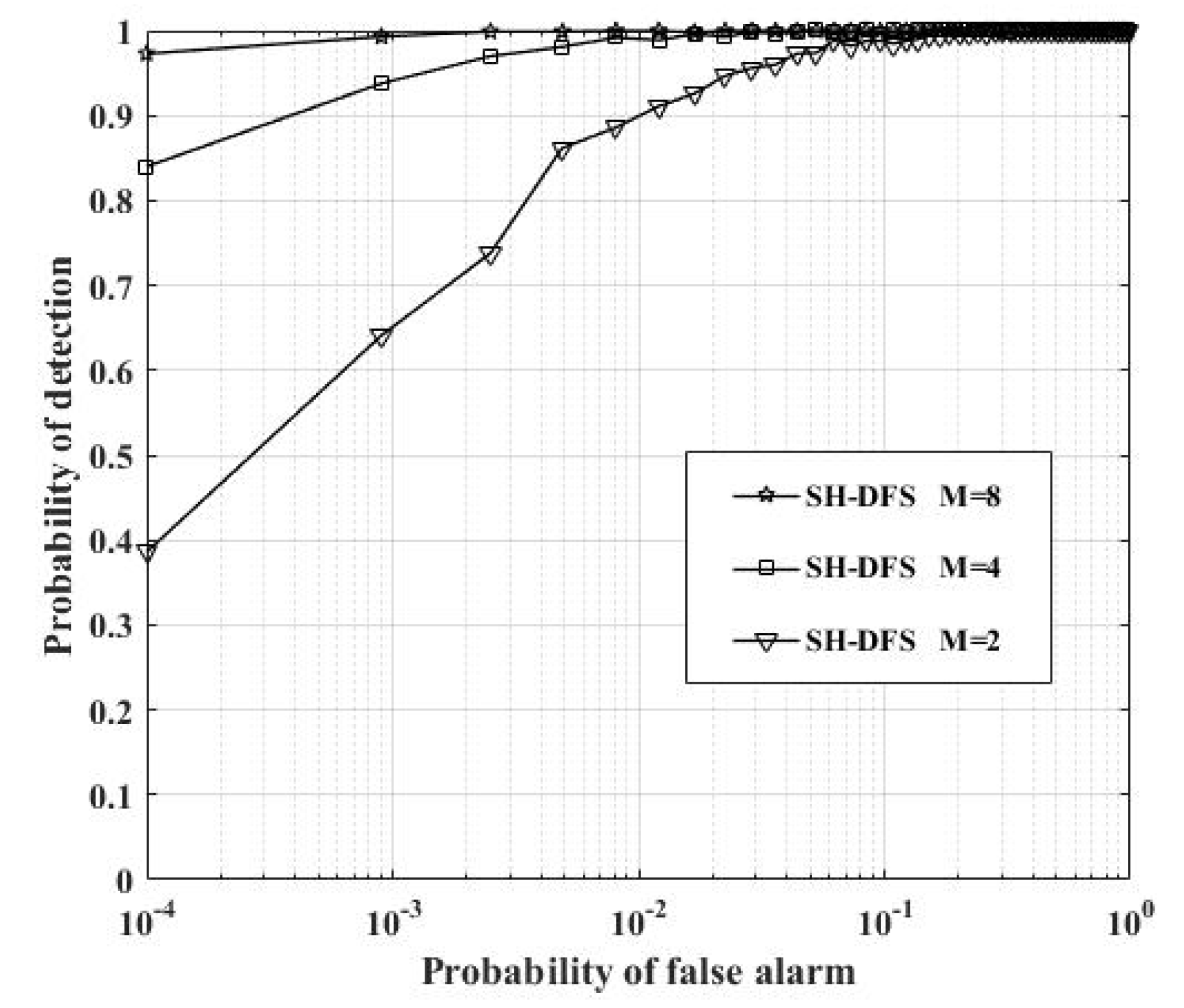
Figure 16 shows the comparison of the performances of the clustered distributed systems with SH-DFS (N = 30, M = 4,
Pe = 0.05), where
b was fixed at 2, 3, and 4. When
b increased, the performance of the system with SH-DFS also increased because more information was transmitted and fused to make a global final decision. In addition, we found that the performance of the system with SH-DFS was close to the performance of the centralized system with the increase of
b. The system could achieve a probability of detection of about 0.8 when the probability of false alarm was fixed at 0.1.
Figure 17 shows the comparison of the performances of the clustered distributed systems with SH-DFS (N = 30, M = 4,
b = 2), where
Pe = 0 and
Pe = 0.05. It was clear that the non-ideal communication channel had a negative influence on the clustered distributed system.
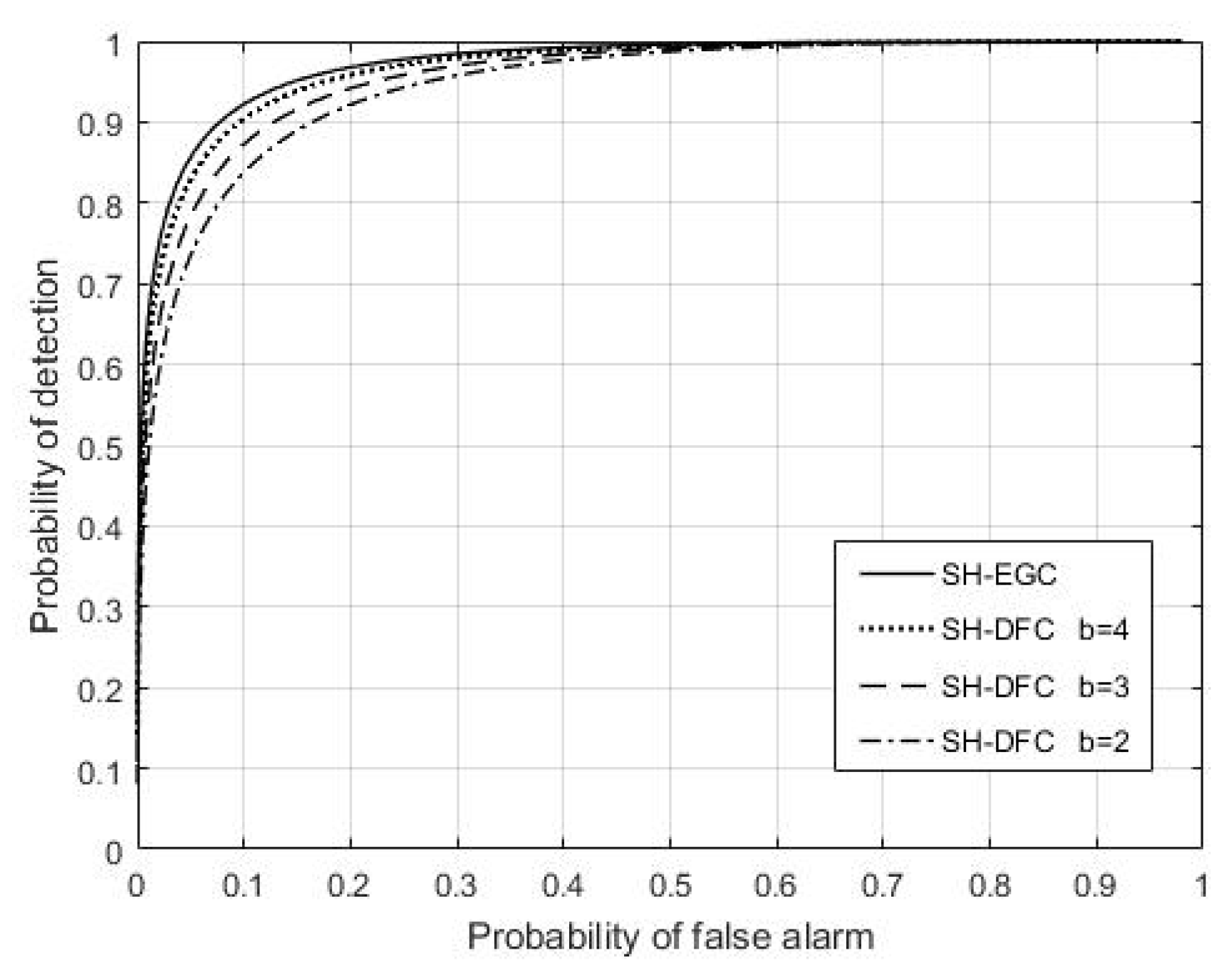
5.4. Soft Decision Fusion with Equal Gain Combining (EGC)
Soft decision fusion with equal gain combining (SH-EGC) is a soft fusion rule, which has a good detection performance and is easy to apply [
29]. It has been studied and widely used in cooperative spectrum sensing systems. Here, we compare our method SH-DFS with SH-EGC. Let N be 30, M be 4,
Pe be 0.05, and SNR be 2dB for all local sensors.
Figure 18 shows the comparison of the detection performances of SH-DFS and SH-EGC. We found that SH-DFS (
b = 3, 4) had a good performance as well as SH-EGC without quantization, and the little difference between them could be ignored. Although the largest number of quantization bits was decided by the system in practice, the two-bit quantization or the three-bit quantization used in the proposed method could usually be accepted, which helps the system achieve a probability of detection of about 0.8 and 0.9 when the probability of false alarm was fixed at 0.1.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}