3.1. Structure and Roles of the Proposed Cognitive Radio Engine
The proposed cognitive radio engine platform requires a separate step to calculate the probability of PU channel occupancy. This allows for the estimation of the PU channel usage pattern by using a functionality of the cognition engine equipped with spectrum sensing. In this paper, the spectrum sensing observations of the PU channel occupancy pattern are assumed to be perfect, and the pattern obtained via actual spectrum sensing is considered complete. In general, the cognitive engine is composed of four types of engine modules consisting of the cognition engine, the learning engine, the reasoning engine, and the optimization engine. Among those, this paper only deals with two specific engines, i.e., the learning engine, as well as the reasoning engine, introducing their functionalities and capabilities. For given PU traffic patterns associated with every channel, in order to inspect their performances, we assume that the cognition engine works perfect so that the sensed information indicating whether the PU exists or not is correct. The reason why this assumption is made is attributed to calculating the collision probability as a tool of assessment for the performance of the reasoning engine. Therefore, along the step for the PU traffic generation, at first, the distinctive parameters
and
are specified, which yield probabilities
and
for each channel; with regard to these, the PU traffic is artificially generated in the sequel. Since the sensing process is accomplished without invoking any detection error, the resulting PU traffic represented in two-state binary fashion for each channel is exactly the same as the result of the cognition engine. Furthermore, this PU traffic pattern is subsequently utilized for estimating the PU occupancy probability by applying the individual methods of sampling approaches with varying either the number of samples or the sampling interval. In addition, the PU state duration time is presumed to be random following an exponential distribution, and the occupancy patterns corresponding to every channel are independent.
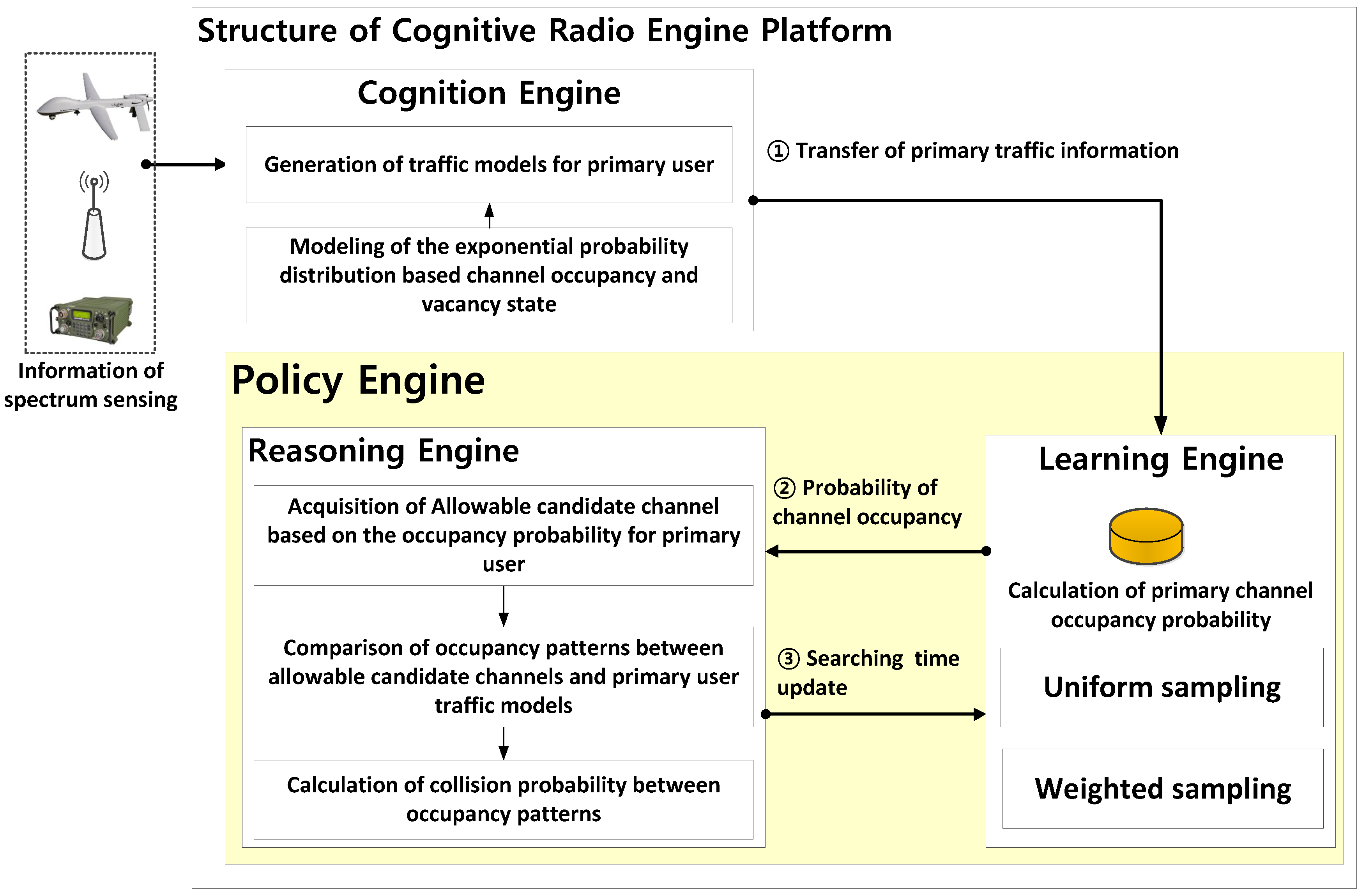
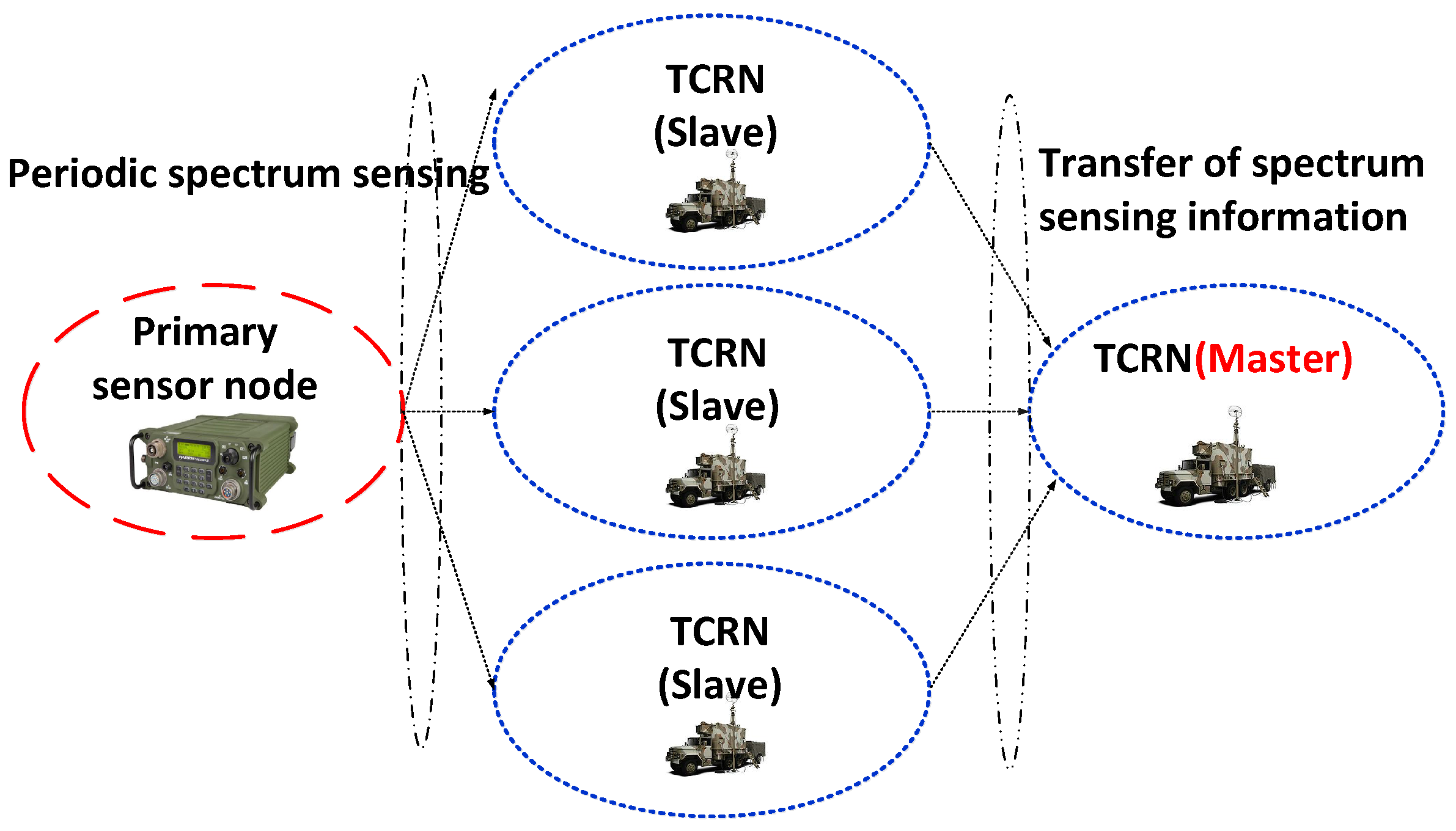
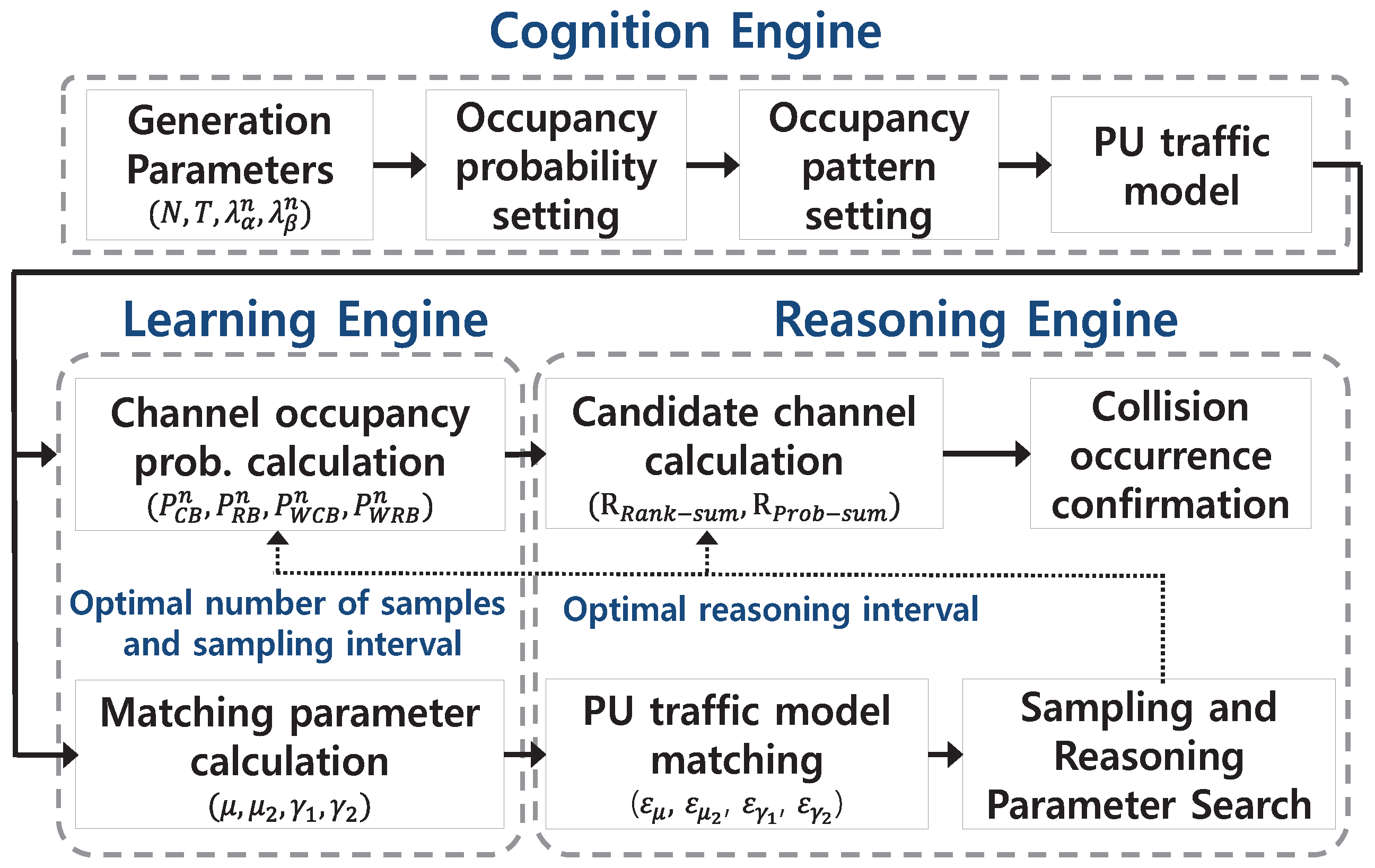
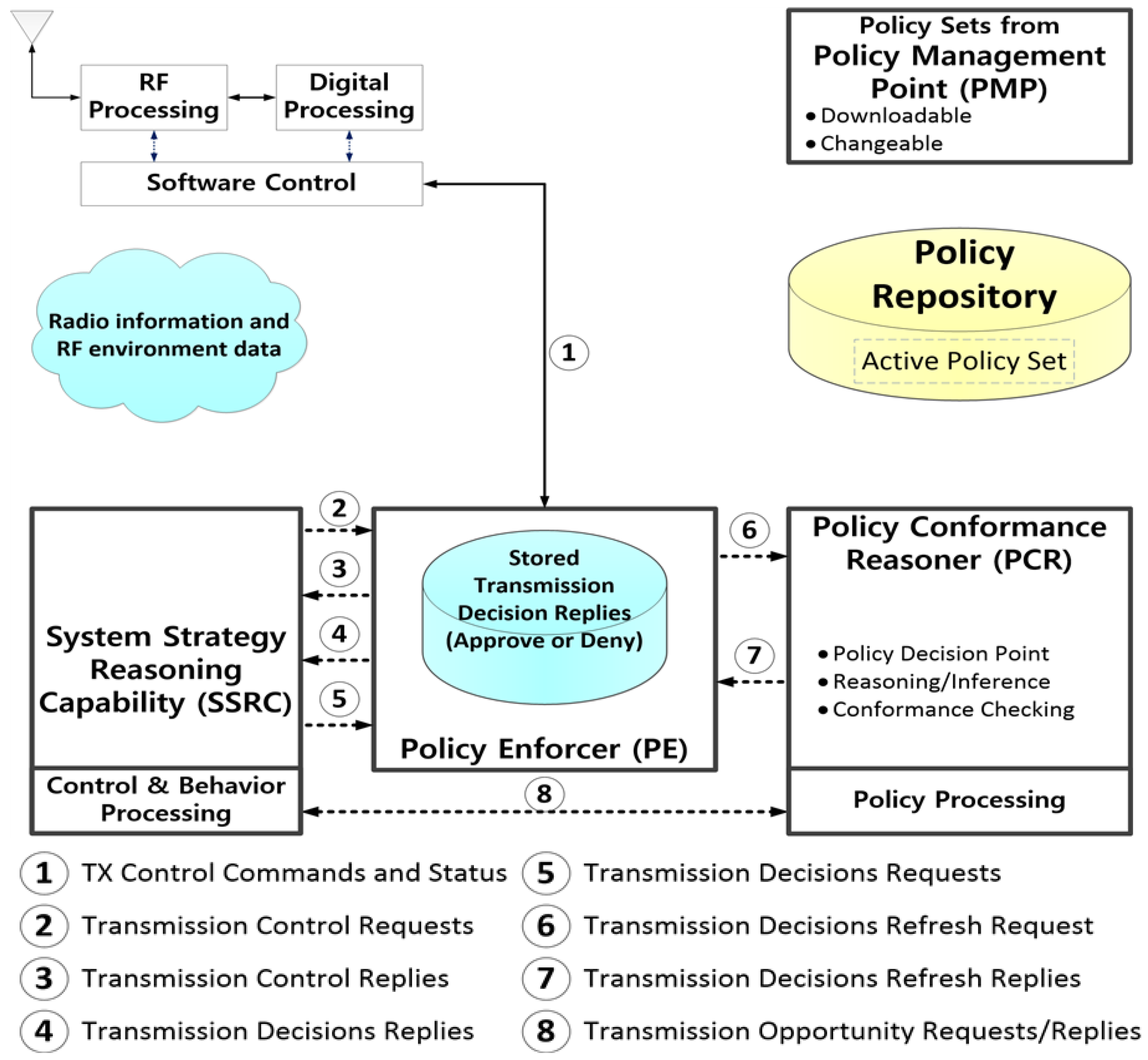
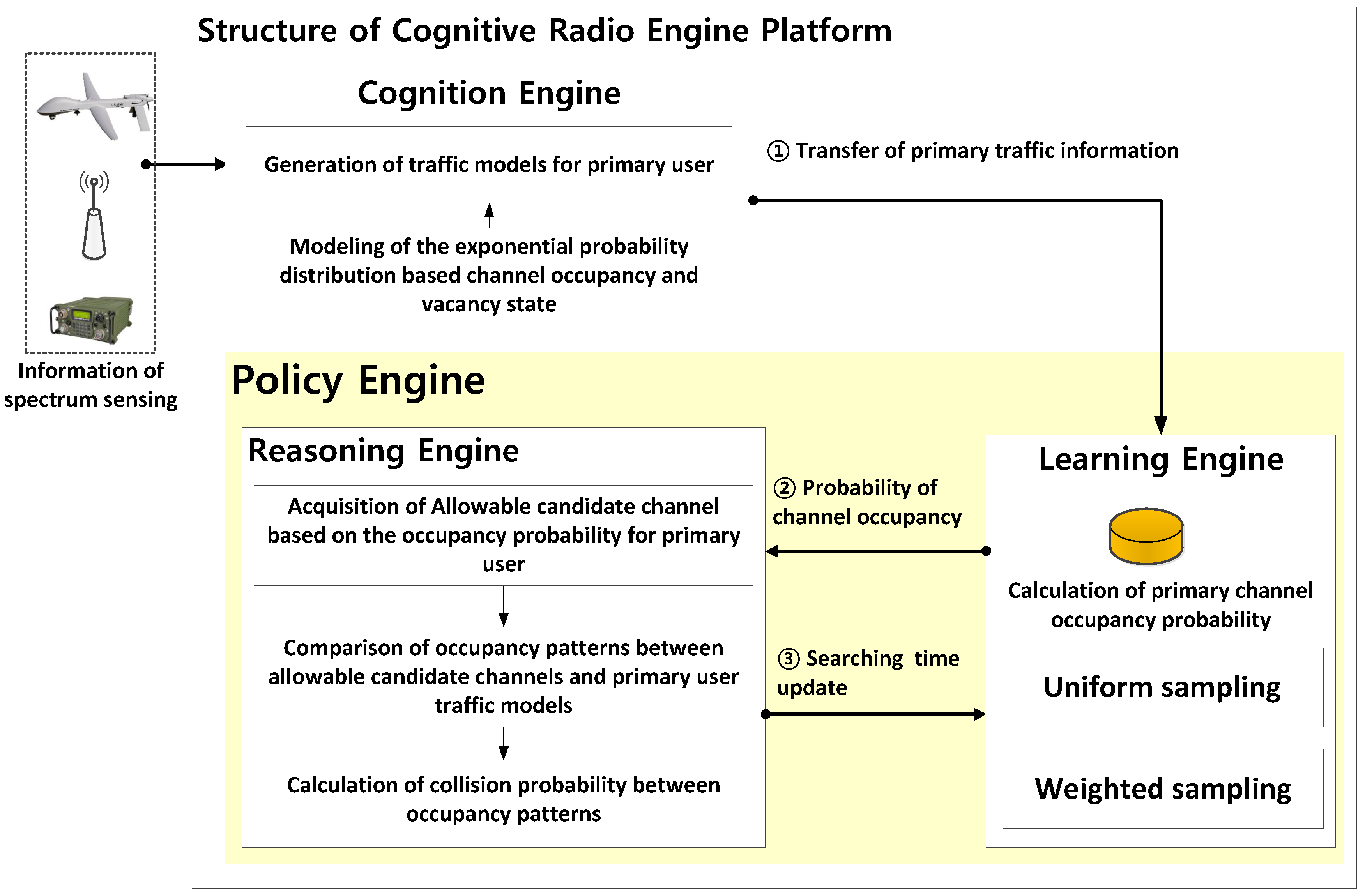
Figure 3 depicts the entire structure of the proposed cognitive radio engine platform.
In
Figure 3, one of the major roles assigned to the learning engine is the quantification of the PU occupancy probability, which is obtained from observations in the temporal domain for every channel to be inspected. This information is delivered by the cognition engine. The process of quantifying the PU occupancy probability associated with a certain channel is performed by sampling the PU’s channel usage patterns during a fixed time slot and then calculating the channel occupancy. In this regard, this study applied either uniform sampling or weighted sampling, the details of which are explained later. Furthermore, one of the major roles of the reasoning engine is the exploitation of a group of available candidate channels on behalf of the TCRN for dynamic access to the spectrum in which the PU is possibly active. As the side information from consolidating the set of available channels, the PU traffic pattern constructed by the PU occupancy probability is transferred from the learning engine.
The process for choosing the available candidate channels is implemented by appropriately arranging the channels in ascending order, which creates a series that specifies the PU occupancy probability per channel, where the top-ranked channel is the first priority candidate to be used. Next, all the ranks calculated by every sampling technique considered in this paper for all of the inspected channels are used to form a composite ranking. Ultimately, a group of available channel candidates for the cognitive radio node is selected based on guaranteeing, to the greatest extent possible, a minimum collision probability. The methods of assigning ranks considered in this study are classified into the rank-sum, based on the sum of the ranks of the occupancy probability values of each channel, and the prob-sum, which selects a group of available channel candidates referring to the sum of the occupancy probabilities of each channel. To verify the performance of the reasoning engine, the number of collisions with an existing PU, whose traffic pattern was a priori prescribed, is counted with the assumption that the TCRN uses the channel assigned by the reasoning engine. In addition, the number of samples and reasoning period were considered to be important steering parameters to achieve the optimal available channel candidates.
3.2. Modeling Primary User Traffic in a Cognition Engine
The application scenarios of the CR engine were designed with a focus on developing a simulated environment, predicting wireless channels that are not used by the primary user, and actively selecting the channels that have a low probability of PU occupancy. In the simulation scenario, the PU were assigned to individual channels, and the number of licensed channels was assumed to be equal to the total number of primary users. It was also assumed that the PU is licensed to the station in the assigned frequency band and does not leave the frequency band. At this time, it is noted that the use of a channel by a PU is considered to be independent for each individual channel, and channel use can change over time. In this environment, for the selective use of the vacant channel, i.e., one not used by the primary user, the CR node needs the technology to detect the vacant channel and the ability to selectively use it.
The procedure for generating the PU traffic model is addressed in this subsection using an appropriate statistical distribution of the PU’s channel occupancy pattern using data from spectrum sensing. Firstly, it was assumed that the PU channel usage patterns for each channel are independent and that the PU channel occupancy data acquired are perfect.
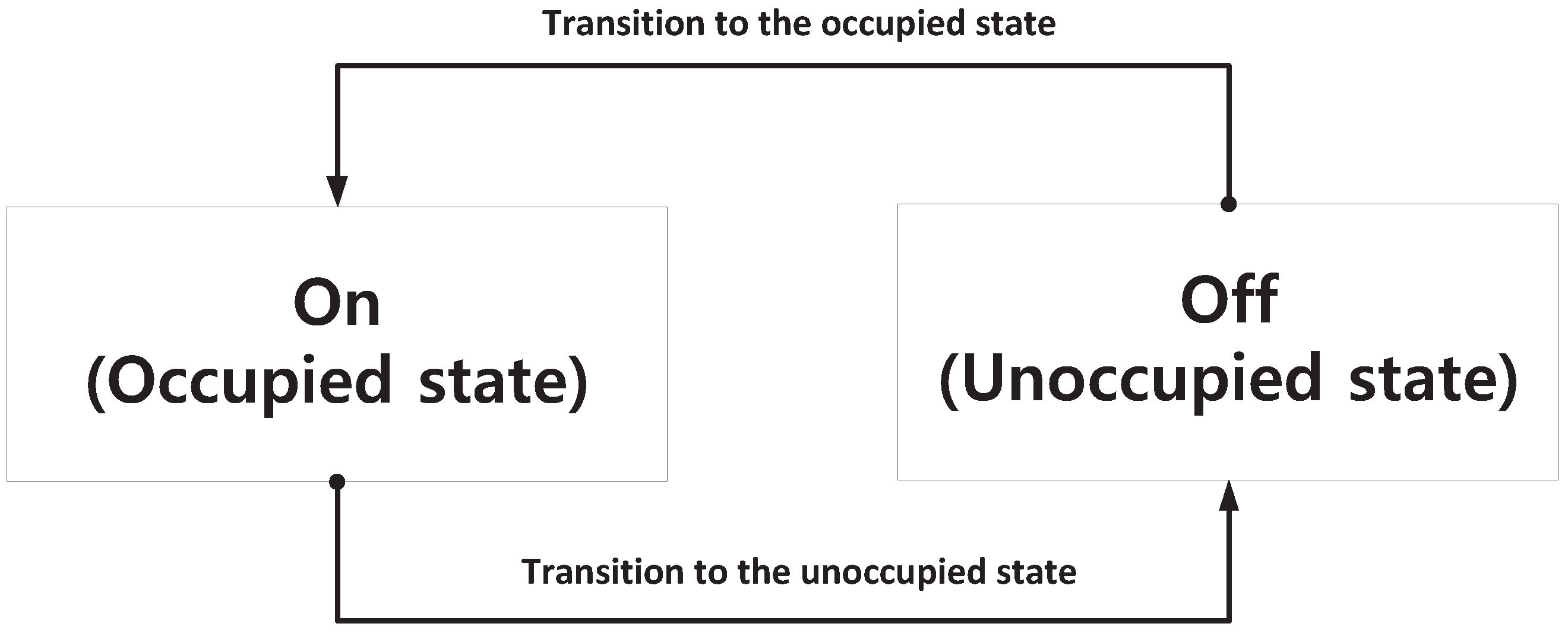
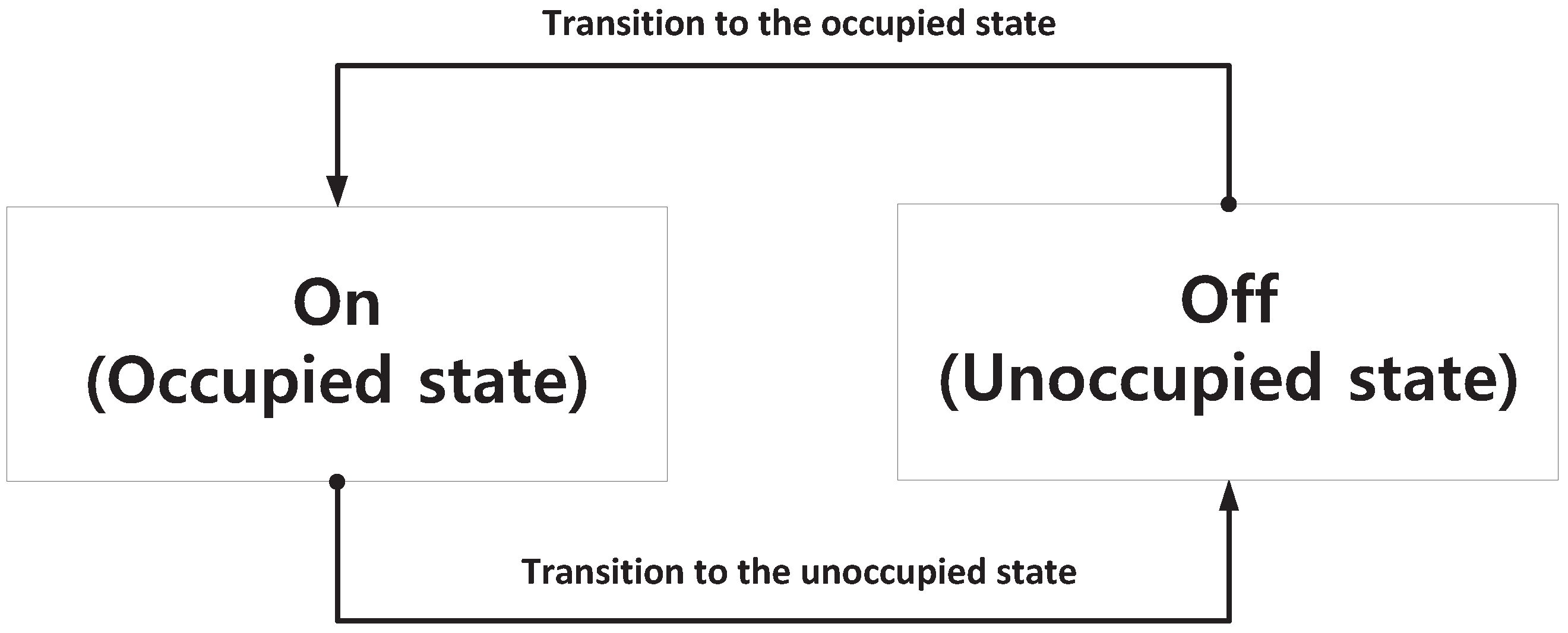
Figure 4 is a conceptual diagram representing the process of switching the PU state between ON and OFF.
Figure 4 reflects the PU channel state transitions, and Equation (
1) is the formulation for the probability of a PU being in an OFF state relative to all observed channels [
18]:
In addition, Equations (
2) and (
3) define the exponential probability distribution functions, in which the mean value
of the random variable is the duration time interval of the PU OFF state, whereas the mean value
is the duration time interval of the PU ON state:
Here, it should be noted that the PU’s channel usage can be dynamically adjusted by modifying the
and
values. Specifically, Equation (
3) is used to calculate the average value of
versus
N, the total number of channels to be observed. In this paper, we assume that all the frequency channels are completely utilized by distinct PUs having their own traffic patterns. Here, each traffic pattern is solely dependent on the fixed constant
, which is not a random variable, specified by mean values of exponentially-distributed time durations relevant to the PU OFF state, as well as the PU ON state. Since the number of PUs is equivalent to that of frequency channels, many PU traffic patterns are required to be generated in order to conduct the simulation. For the sake of the artificial generation of traffic patterns, which are mutually distinct, it is necessary to make an arbitrary choice of the probability
in the range of [0,1] for each channel. Therefore, to assess the performance of the proposed channel allocation scheme based on the case-based reasoning, the collision probability should be measured as a major indicator considering how much the proposed method is appropriately working. Moreover, in the simulation, the case-based reasoning is carrying out the functionality of characterizing the PU traffic in a certain confined interval of reasoning time with regarding to the histogram pattern of
resulting in the opportunity of assigning channels for CR nodes.
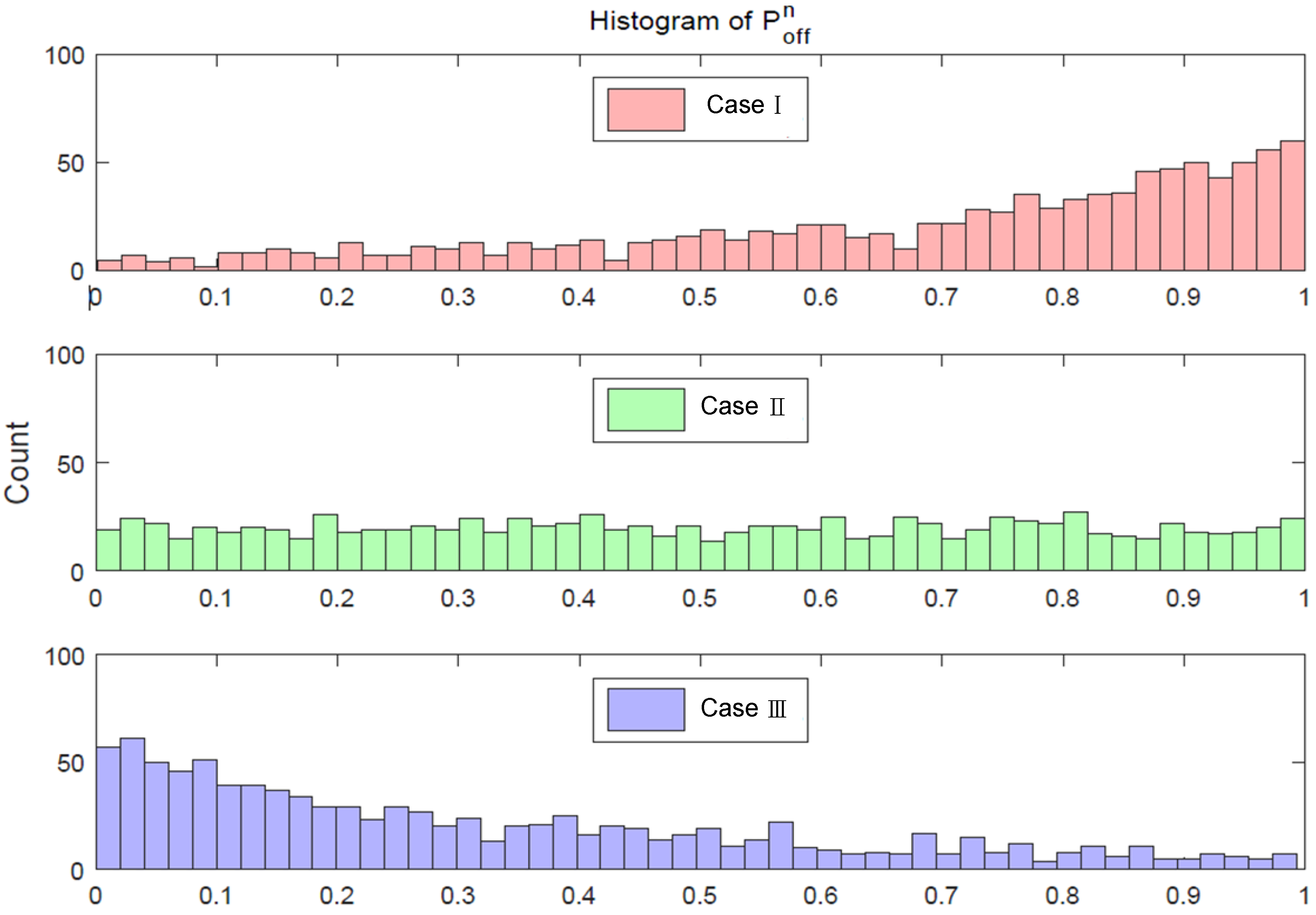
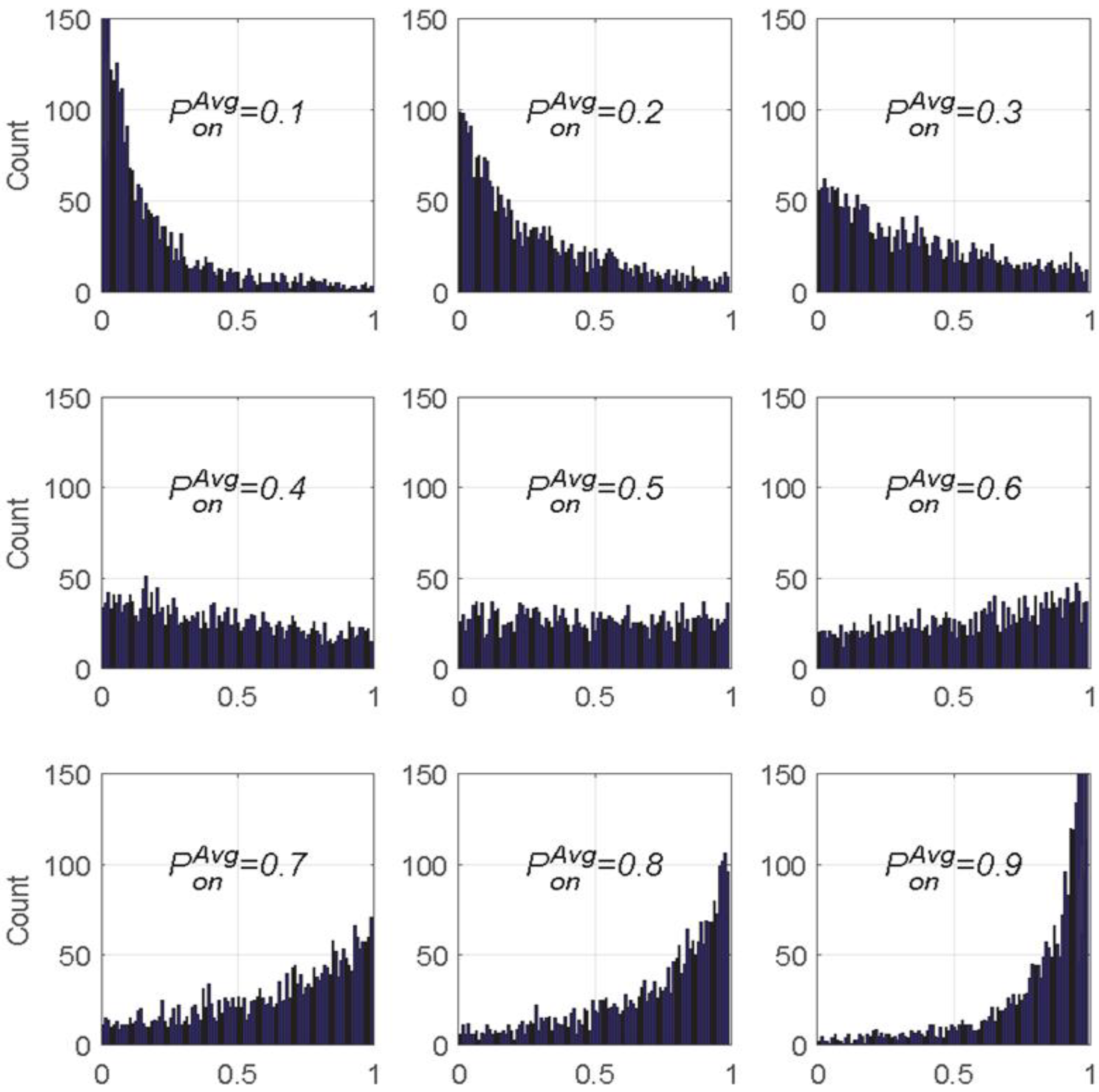
Figure 5 shows the distribution in the form of a histogram of
, designated as the probability of PU being OFF, where the total number of channels
N is 1000.
As shown in Equations (
2) and (
3),
and
are not random variables, but constant values, whose values are distinctive depending on the channel. More specifically, those values are nothing but the average of the exponentially-distributed random duration of time associated with the PU OFF state and ON state, respectively. To create the artificial simulated environment, in which all the channels experience distinctive PU traffic patterns, the corresponding mean values
and
are specified differently on purpose. Along the way of achieving the result as in
Figure 5, a priori, 1000 pairs of
and
are generated for every channel to be assigned, and subsequently, the histogram of
is generated. In
Figure 5, Case I, Case II, and Case III reflect the three distinct PU traffic situations, where Case I indicates that most of the value of
is larger than that of
, Case III reflects the opposite case, and Case II deals with the case that most of the value of
is almost similar to that of
.
As can be seen in the preliminary simulation results in
Figure 5, for Case I, there are many channels in the OFF state, so that the frequency of PU channel occupancy is low. Thus, there would be a high opportunity for the usage of the cognitive radio node. On the other hand, for Case III, the updated histogram reflecting channel occupancy probabilities is slightly skewed to the left, which means that the PU traffic is heavy, so the opportunity for usage becomes low. After generating the value of
for the aforementioned OFF state of the PU channel in terms of
and
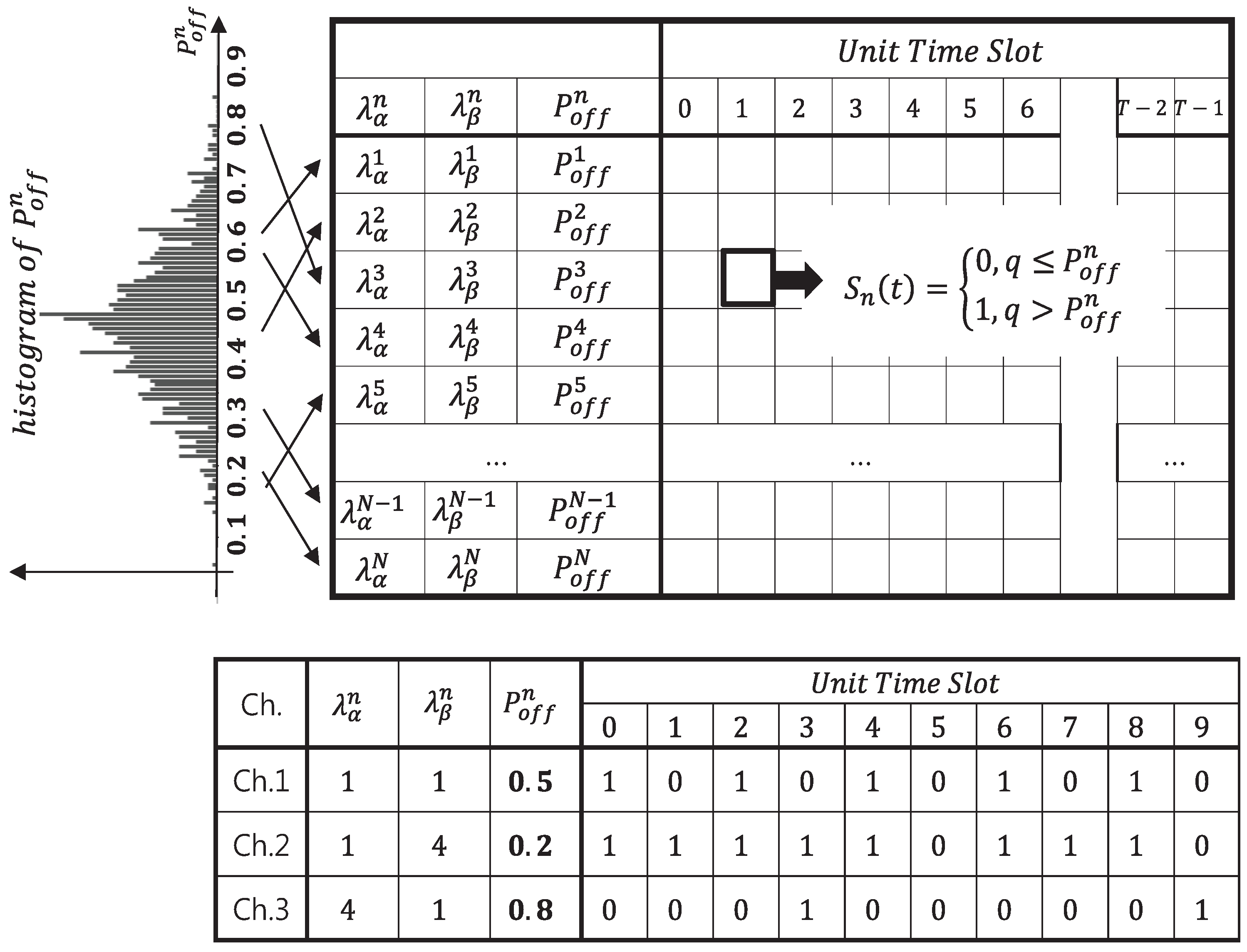
, the next step is to define the instant of time at which the PU activity state changed. Equation (
4) determines whether or not the PU state changes for a particular unit of time, designated by the time slot
t at channel index
n. After the
value is set, a random variable based on the “Russian roulette” method is created to model the state change of the channel that satisfies the idle probability for the channel. At this time, the occupied state value for the corresponding channel is set to zero or one by comparing the uniform distribution random variable
q and the
value. Once the random variable
q is chosen in the range of
, the PU state can be specified as the following:
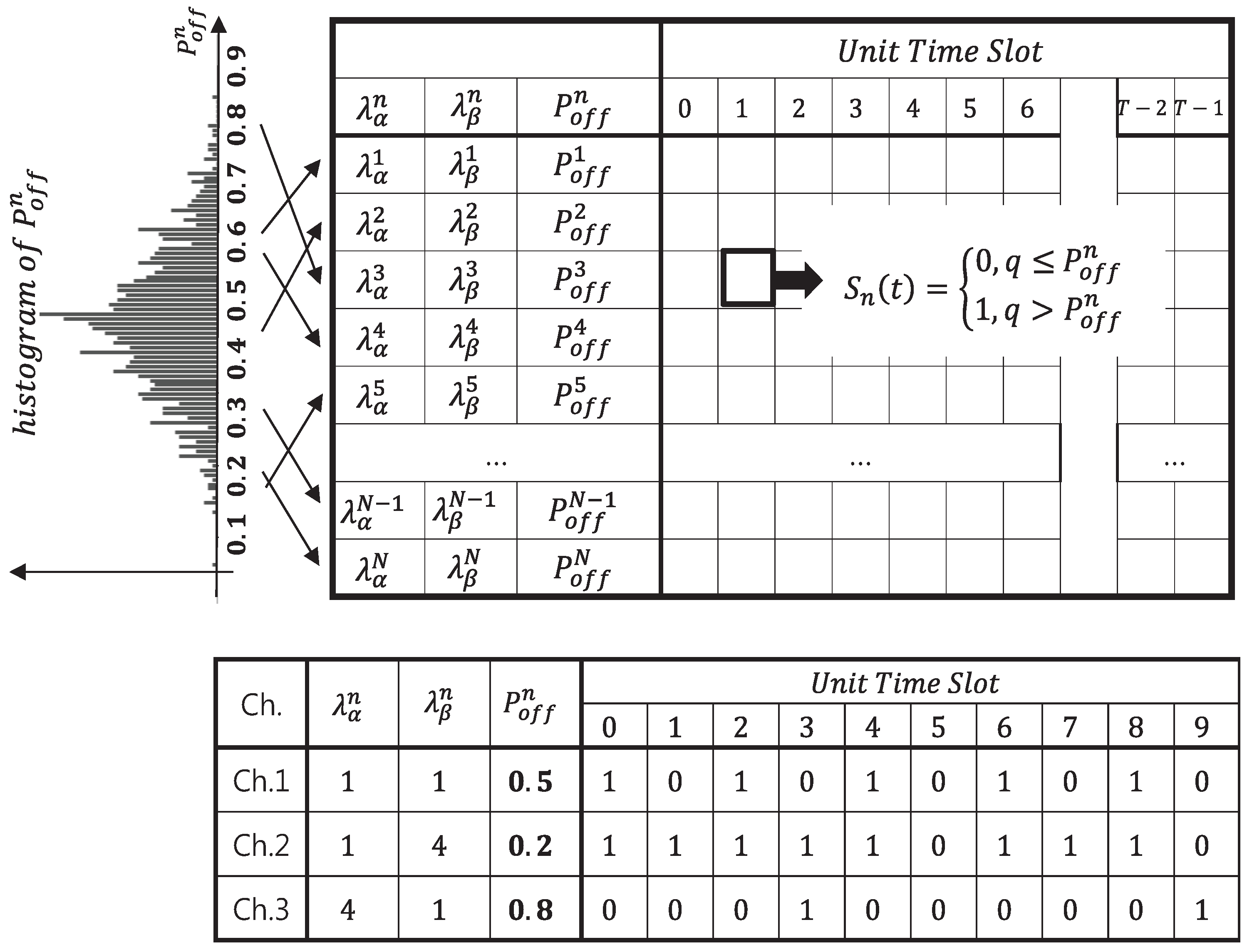
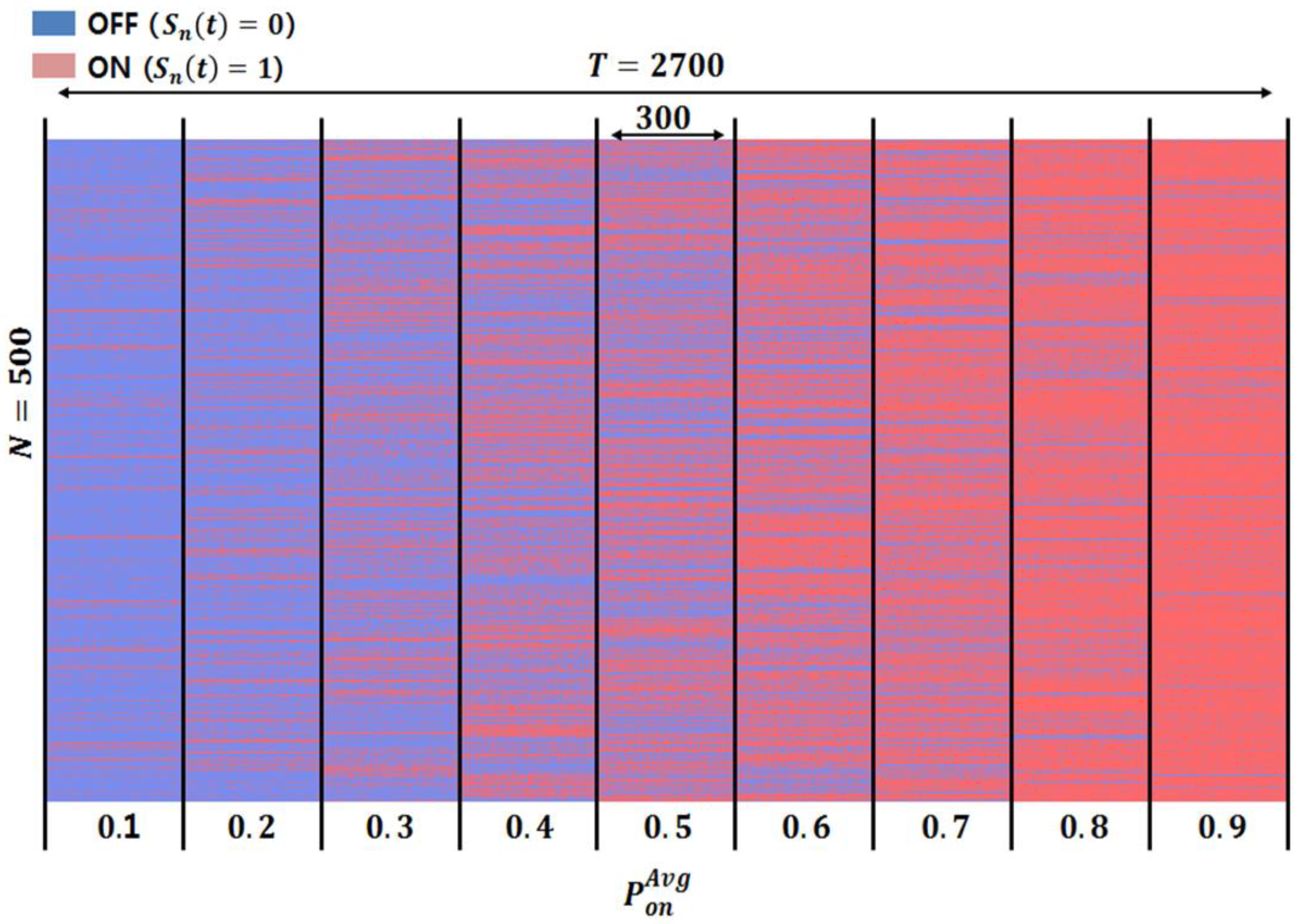
Figure 6 shows a conceptual diagram for the generation of the PU traffic in which the PU channel in the occupied or unoccupied state at each time slot is designated as zero or one, respectively, as defined in Equation (
4).
For example,
Figure 6 shows the modeling of a state transition associated with three channels. Among them, for the case of Ch.1,
and
are the same such that the “OFF (0)” state and the “ON (1)” state appear at the same ratio, and their mean values are one. Similarly, other kinds of PU traffic models can be generated by assigning PU ON and OFF state patterns through the statistical modeling previously described.
3.3. Occupancy Probability Calculation in the Learning Engine
During the execution of the learning engine, the PU occupancy probability with respect to each observed channel can be calculated by counting the time slots for which PU is in the ON state over the entire observation time
T. It can also be expressed as the exact theoretical formula shown in Equation (
5) [
18]:
Using the approach for calculating PU occupancy probability making use of empirical observations instead of Equation (
5), it is necessary to employ a sampling method for the acquisition of the PU’s channel usage patterns with a high degree of accuracy. In this regard, this study applied uniform sampling and weighted sampling methods. The uniform sampling method initially divides the overall time interval
T into individual unit time slots with a uniform size and estimates the PU channel occupancy probability from the samples associated with PU traffic. Furthermore, the calculation methods of uniform sampling for PU channel occupancy probability can be divided into systematic count-based sampling (CB) and random count-based sampling (RB), which are distinguishable according to the size of the sampling interval, which is defined as the individual unit time slot [
19,
20].
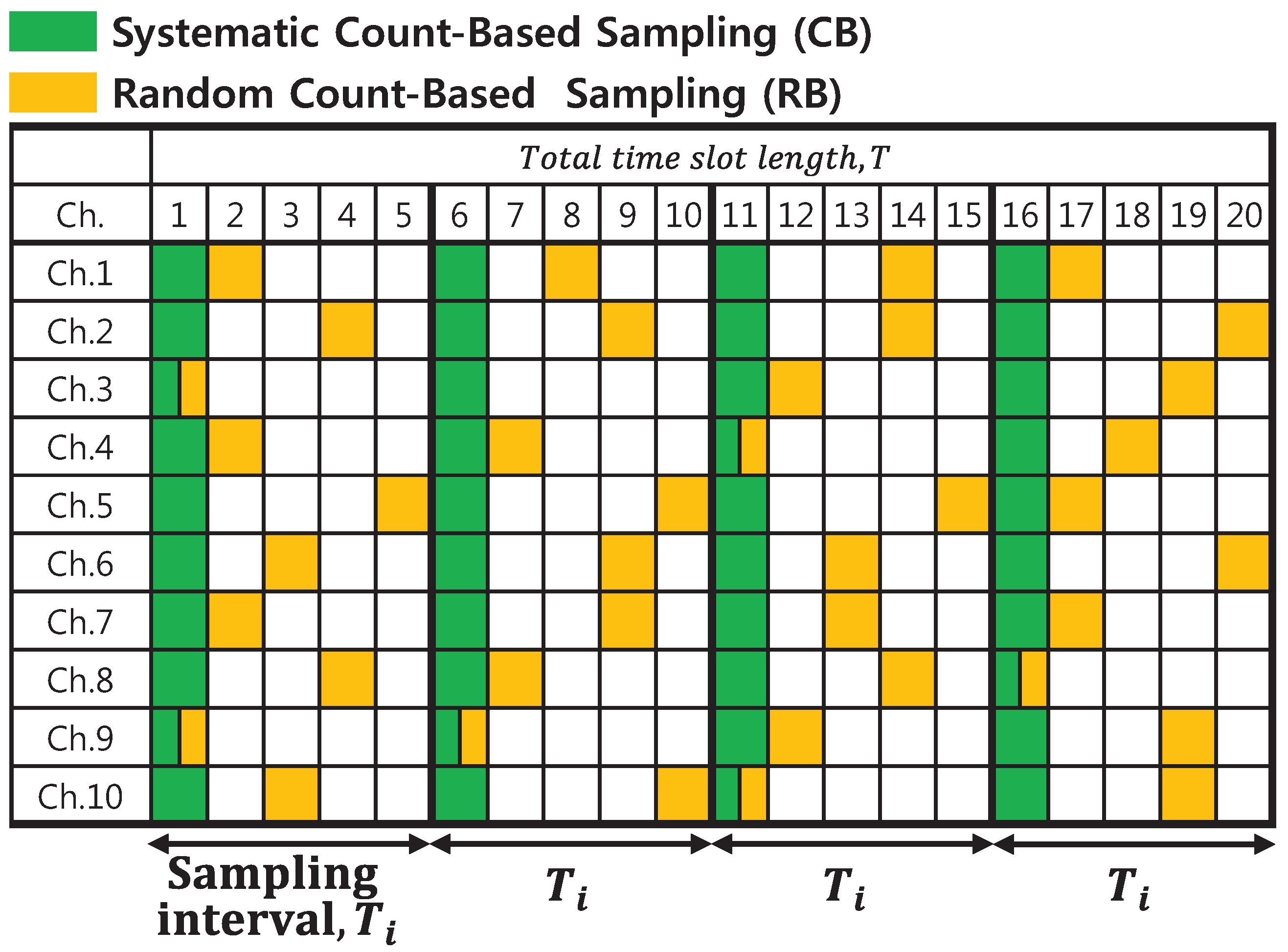
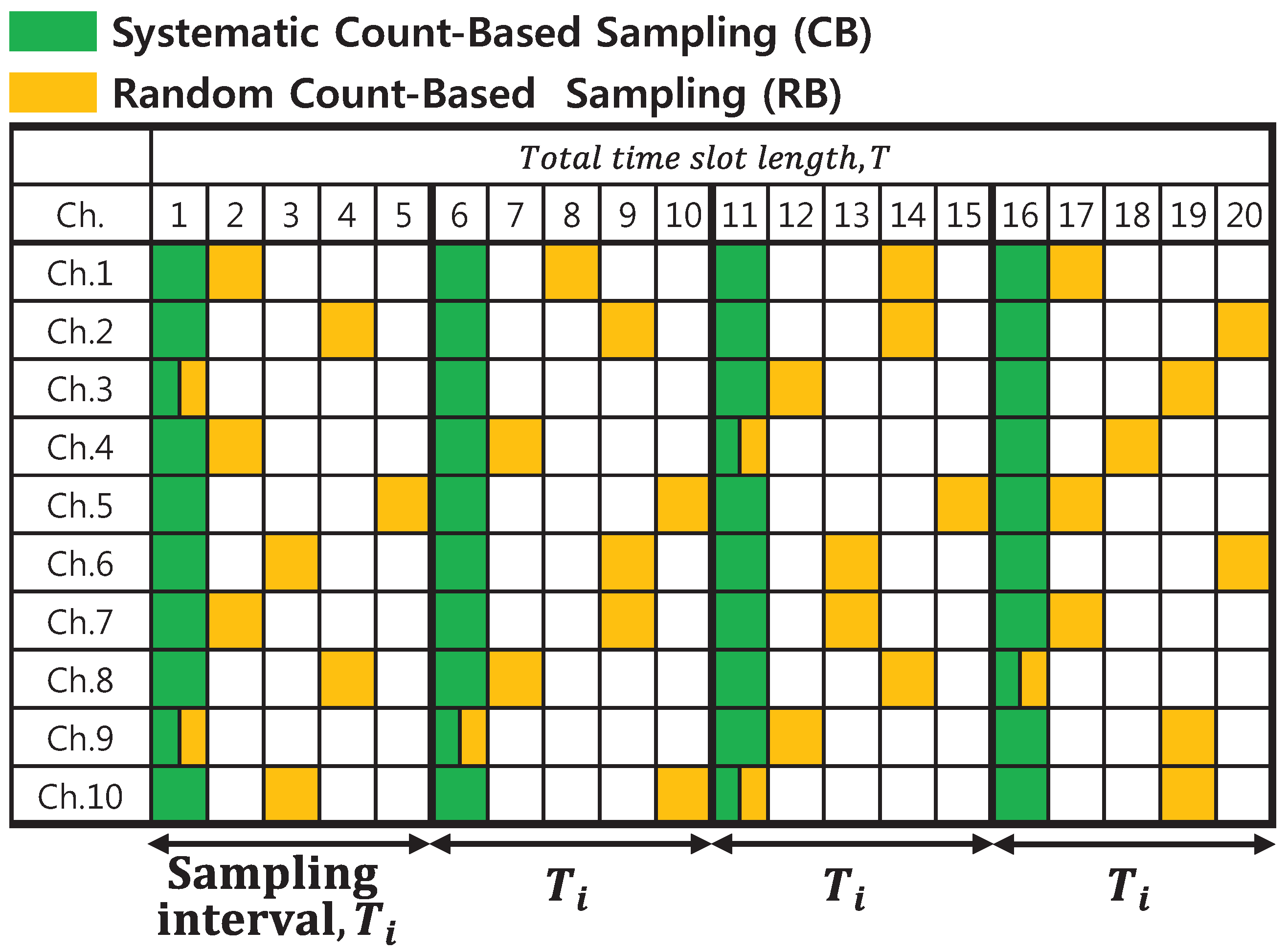
Figure 7 depicts the process for uniform sampling for a case in which the mean value of the “OFF” and “ON” intervals is one.
As in
Figure 7, the CB method involves acquiring samples at consistently fixed time slots over every sampling interval. On the other hand, the RB method specifies the time slot to be sampled at random over each sampling interval. Consequently, the PU occupancy probability can be calculated by observing the samples that contain the state of the PU traffic. Equation (
6) calculates the occupancy probability of the
nth channel using observed samples obtained by the CB sampling method. Equation (
6) can also be applied to the RB sampling method.
In Equation (
6),
M indicates the overall number of samples, and
represents the status of the PU activity indicator so that zero reads as the ON state and one reads as the OFF state at the
mth time slot for channel
n. In this paper, besides the conventional systematic and random count-based sampling methods, their weighted versions are proposed namely as WCB and WRB respectively. More precisely, by applying these approaches, the PU occupancy probability can be estimated by considering the temporal correlation. Therefore, relatively high-valued weights are assigned for recently-acquired samples, whereas older samples are weighted by small values. In this case, the weight can be interpreted by the well-known forgetting factor, and the corresponding weighting process primarily tapers the samples observed during the application of the CB and RB methods. Equation (
7) corresponds to the estimated PU occupancy probability via the WCB sampling method [
20].
With the assistance of Equation (
8), the greatest weight is multiplied by the most recent sample indexed by
M, and the lowest value is multiplied by the oldest sample. Furthermore,
K in Equation (
8) is the normalization factor and is equivalent to the sum of the exponential values. Similar to Equations (
7) and (
8), WRB-based PU occupancy probability calculations can be performed on randomly-chosen samples.
Table 2 summarizes the features of uniform sampling and weighted sampling.
3.4. Available Channel Extraction Method via Conducting the Reasoning Engine
3.4.1. Reasoning from the PU Traffic Reference Model
In this paper, we propose a novel channel selection method in which the CR node selects a suitable unoccupied channel, and the channel with the lowest probability of being occupied by the primary user among vacant wireless channels is compared with the previous occupation activity. The CR engine is designed to select the proper candidate channel that is inducing the low level of the collision probability. We also evaluated the performance of the CR engine by comparing the occupancy patterns in a primary user traffic model generated by the mathematical modeling performed by the cognitive engine. In addition, appropriate reasoning and learning parameters, such as the reasoning cycle, sample number, sampling interval, and so on, for satisfying the collision probability requirements of the system were calculated.
Clearly, since the collision probability could not be directly controlled, the proposed method employs the case-based reasoning, which is an indirect way of retrieving appropriate parameters associated with the reference model of PU traffic inducing a low level of collision probability. Here, the reference model plays a major role attributed to giving the CR node a versatile opportunity of selecting relevant parameters. The case-based reasoning is triggered by specifying the feature of the current PU traffic pattern via conducting the shape matching process as a way of comparing the feature relevant to the newly-acquired histogram reflecting the current PU traffic with that stored in the reference model in a clustered and sorted manner. For the next step, the simple extraction process for searching parameters in the reference model is executed. For the purpose of achieving a high degree of precision on the selection of parameters, quite a few arbitrary PU traffic generations should be conducted subject to ensuring the collision probability is as low as possible.
The proposed reasoning method could not perfectly protect the PU from the interference induced by the SU because the candidate channels are only parameters exploited from referring to the PU traffic model. Here, the reference model is constructed by conducting an enormous amount of PU traffic generations followed by executing the deliberate clusterization steps to execute the PU traffic matching. This whole process can be regarded as the learning engine, which can provide adequate information about the reasoning period, the sampling period, and the number of samples for precise traffic matching together with the available channel after the sorting and ranking process proposed in this paper. It is valuable to emphasize that these relevant parameters are exploited by conducting an exhaustive search in the direction of minimizing the collision probability. Assuming that there is no prior knowledge about the channel state and PU activity in this paper, at the instant of starting a new reasoning period, the SU only can transmit the signal over one of the channels suggested by conducting the reasoning process.
This paper considers the case-based reasoning approach to extract a group of available channels for a cognitive radio node operating in a tactical sensor network. For this objective, inspection of the histogram representing the channel usage pattern of a PU is initially conducted using the learning engine. During the second step, the resulting histogram is matched with reference traffic models previously stored in the learning engine; this step is to determine which traffic model is highly similar. During the third step, as the final step in the case-based reasoning process, the group of channels is extracted. To provide some insight into the procedure for matching the PU traffic pattern,
Table 3 delivers a few examples that highlight the feature of characterizing the shape of the histogram in terms of the mean, variance, skewness, and kurtosis. There are nine reference traffic models, which can be distinguished from each other by analyzing these intrinsic signatures that determine the shape of the histogram.
In
Table 3, the first traffic model in the leftmost column has the lowest mean value, and the mean value gradually increases toward the ninth traffic model. Thus, the first traffic model indicates the situation of low PU activity for every channel, whereas the ninth traffic model corresponds to high PU activity. In this work, the PU traffic models stored up to the previous reasoning period are regarded as reference PU traffic models. The reasoning process determines which traffic model among the reference PU traffic models matches the newly-acquired histogram constructed by the recently-observed samples that are relevant to the PU traffic. In this case, to assess the degree of similarity, the mean and the second, third, and fourth central moments can be utilized to match the traffic models [
21,
22]. The mean value of
is denoted as the central moment associated with the histogram representing the distribution of the frequency of the PU occupancy probability value. The
kth central moment is defined as in Equation (
9),
Furthermore, the relationships introduced in Equation (
10) describe how to generate the second moment through the fourth moment, i.e.,
where
, the second central moment becomes the variance of
, and the third and fourth central moments are used to achieve the skewness and the kurtosis. With the help of Equation (
10), the skewness
and the kurtosis
are calculated by Equation (
11):
The mean, variance, skewness, and kurtosis corresponding to the
ith traffic model, which is one of
I models comprising the overall PU reference traffic model structured for the previous reasoning period, are calculated based on recently-acquired samples. For the purpose of assessing the similarity, Equation (
12) evaluates the individual errors in the mean, variance, skewness, and kurtosis between the overall reference PU traffic model and the recently-constructed PU traffic model as follows:
If a certain index of the traffic model is determined to be an index of the reference, the PU traffic models give the composite error, as specified by Equation (
13). It can be concluded that the corresponding two traffic models are coincident, so the verification of the model for newly-incoming PU traffic is completed as follows:
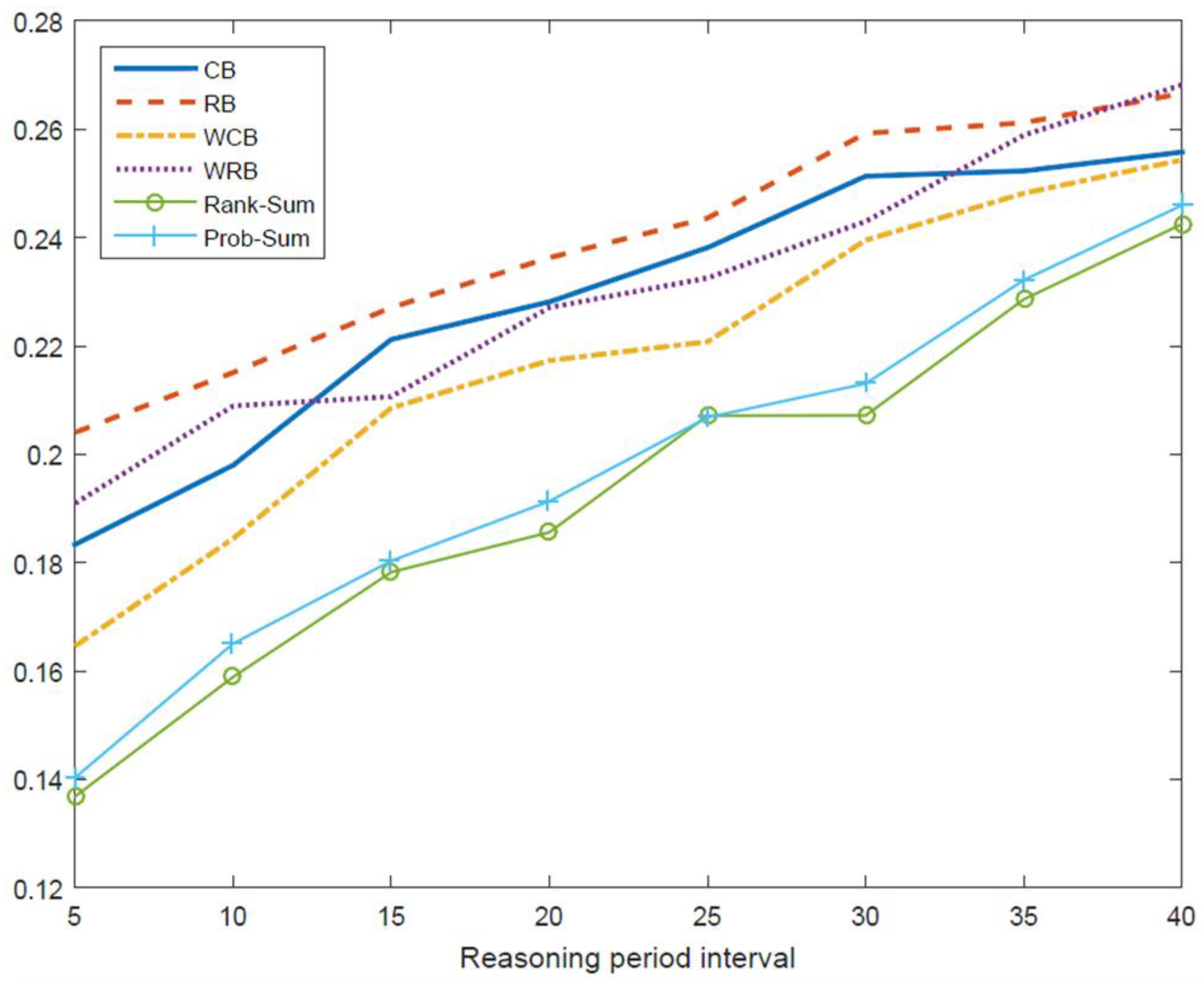
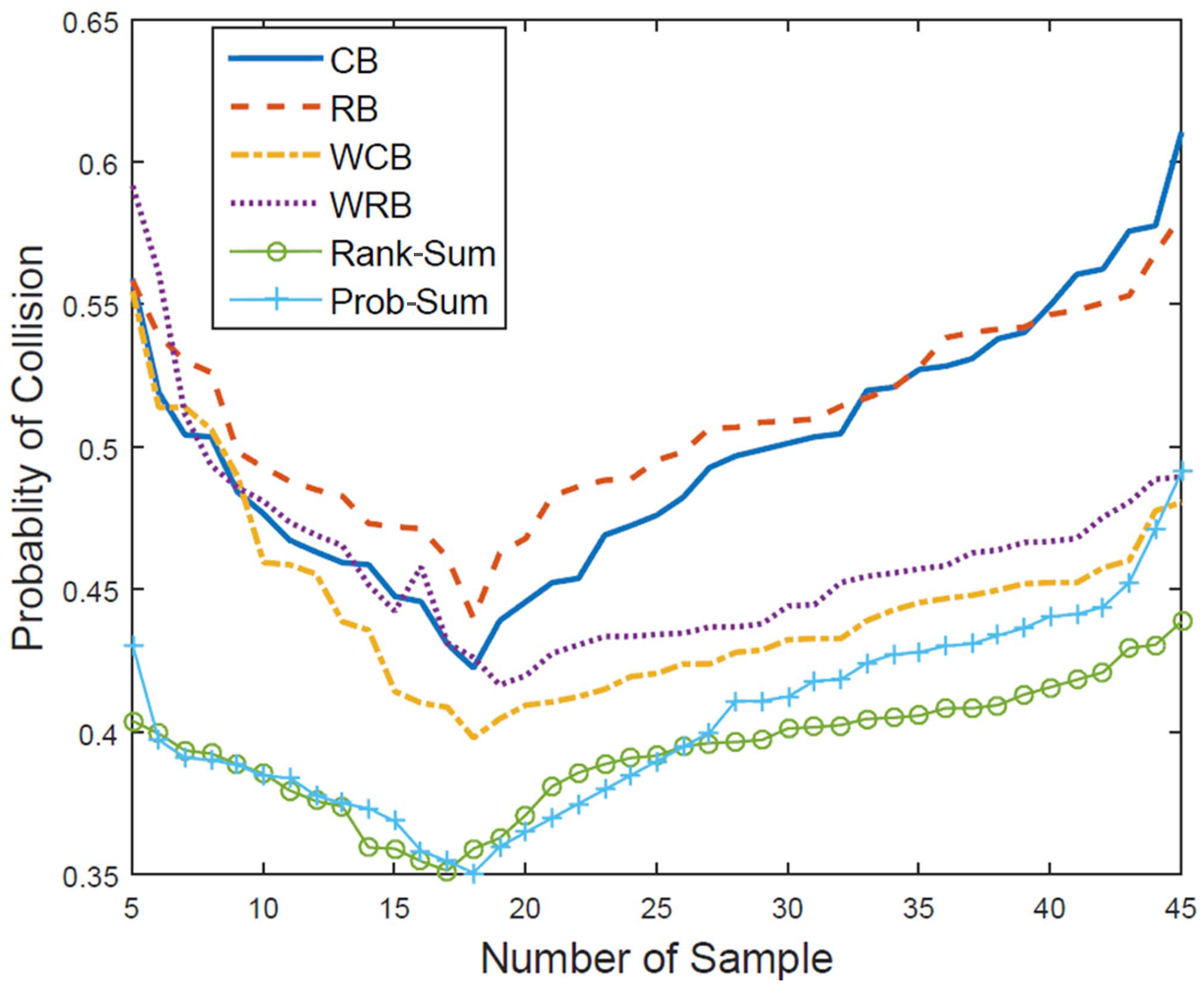
By applying an exhaustive search to identify the correct index of the reference PU traffic model, it is subsequently possible to acquire information about the optimal reasoning period and the optimal number of samples that minimize the collision probability, which are also stored in the reasoning database.
3.4.2. Extracting Available Channel Candidates from Reasoning Results
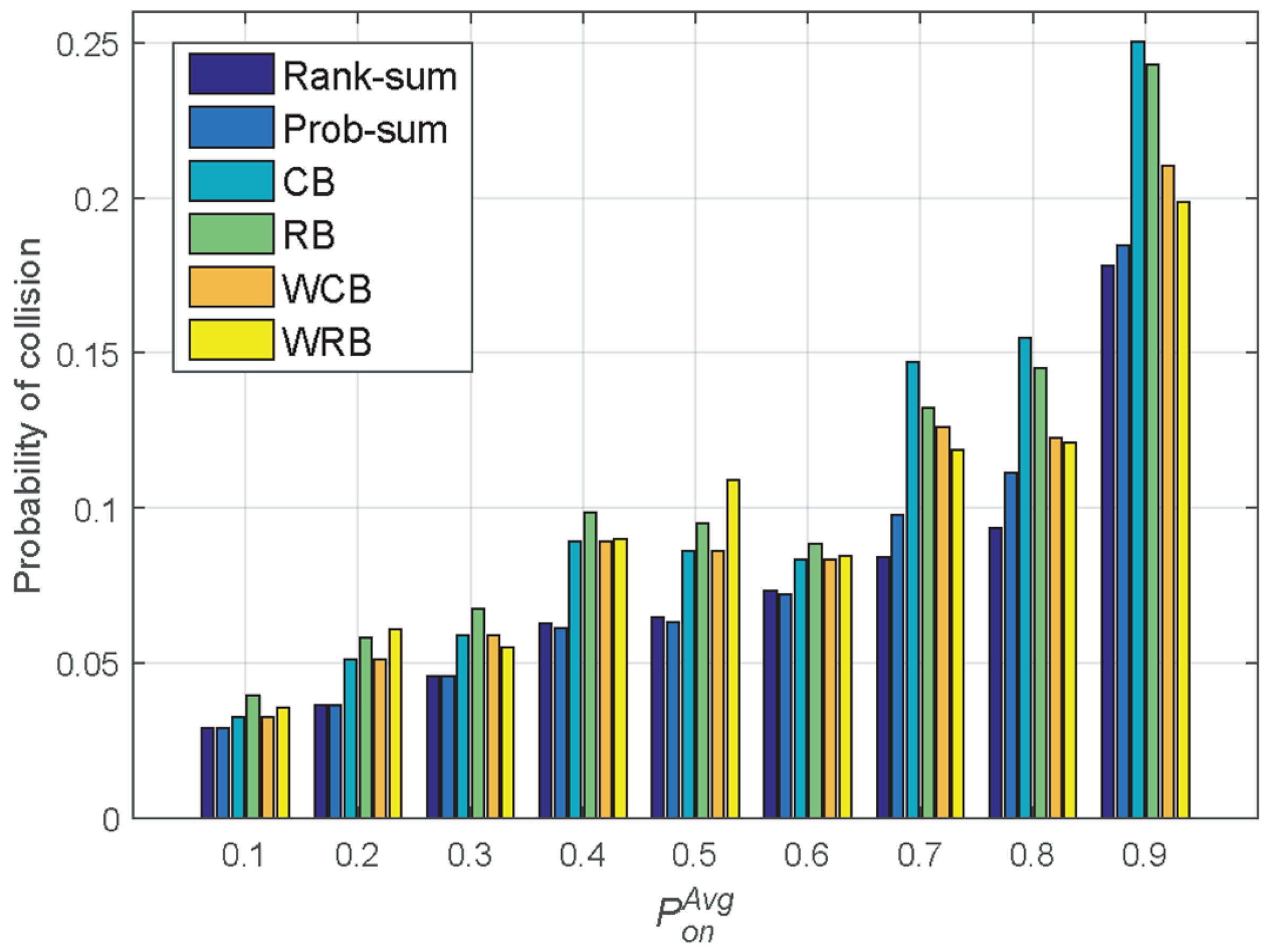
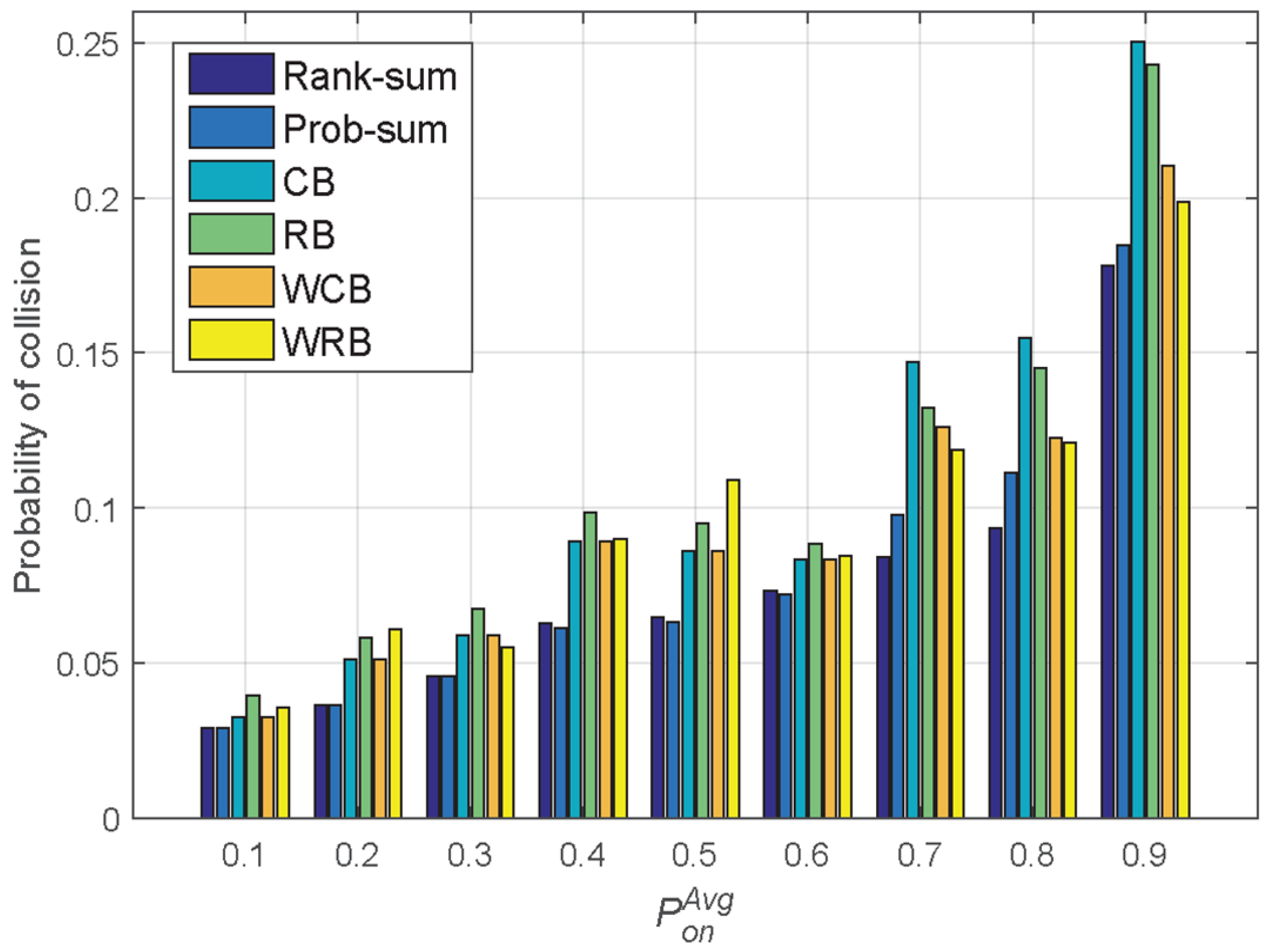
To exploit the group of available channels for allocation to the cognitive radio nodes, a sequence is first arranged of the PU occupancy probabilities in ascending order, and the ranking of all the channels is decided. This study examined the performance related to the PU collision probability by applying individual sampling methods, including uniform sampling methods (CB and RB) and weighted sampling methods (WCB and WRB), together with rank-sum and prob-sum reasoning methods. In this case, collision probability refers to the probability of the event in which the cognitive radio node incorrectly uses a channel that is already occupied by the PU.
To this end, the
jth channel is ranked as
,
,
, and
, which result from the action of the cognition engine followed by the learning engine, and
R is an integer that obeys
. For example, the rank of channel
j calculated by executing the CB sampling method is shown in Equation (
14) [
18]:
Here, the
function is used to decide the ranking of every channel by assessing the occupancy probability, which is calculated and sorted in the learning engine. The range of the rank is shown in Equation (
15) and is the same as the overall number of channels based on the following:
Furthermore, Equation (
16) realizes the proposed rank-sum reasoning approach, which aggregates ranks derived from the execution of each sampling method. As a result, based on this method, the channel with the minimum rank sum is regarded as a candidate channel. This paper denotes this approach as the rank-sum reasoning method, with the relevant formulation given as:
Besides this, Equation (
17) defines the prob-sum reasoning method that specifies the candidate channel by sorting the sum of the occupancy probabilities resulting from each sampling method in ascending order, given by:
Similar to the rank-sum reasoning method, the channel with the minimum probability sum is designated as a candidate channel. In the following,
Table 4 shows the PU occupancy probabilities represented in percent, which is quantified by adopting the individual sampling method. The rank-sum and prob-sum methods give rise to the composite ranking referred to as CB, RB, WCB, and WRB.
As shown in
Table 4, the reasoning method proposed in this paper for determining candidate channels using prob-sum does not select the channel with the lowest PU occupancy probability for a specific sampling approach, but selects a reliable candidate channel, which is the most competitive channel with respect to either the composite ranking or the aggregated occupancy probability. Moreover, another critical point is how many reliable channels are determined to clarify this; a guideline can be recommended based on the PU reference traffic model containing relevant information corresponding to the traffic-matched subject for minimizing the collision probability.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}