1. Introduction
High-accuracy positioning will be a key enabler for a wide range of novel applications in different sectors of industry, including manufacturing, logistics, retail, and transportation. Outdoors, global navigation satellite systems have become the backbone of such location-aware systems [
1], exploiting the time-of-flight of radio signals, while indoors, a wide range of wireless systems has been considered [
2]. The focus on radio technologies is due its advantages, e.g., small size, low cost, and low power consumption, however its performance is ultimately limited by physical properties of the radio environment, in particular by multipath propagation. Signal reflections at objects lead to fading and distortion, which both influence the performance of ranging and positioning systems [
3].
Positioning with radio signals can be achieved with a number of measurement methods [
4], exploiting different parameters of the received radio signals, e.g., the received signal strength (RSS), time-(difference-)of-arrival (ToA/TDoA) and angle-of-arrival (AoA). RSS and AoA can be used with narrow bandwidth (BW) signals, however, their performance is influenced heavily by multipath fading [
5]. A higher BW, in particular ultra-wide-bandwidth (UWB) signals, can be utilized to diminish the effects of multipath fading and distortion [
3]. Finally, the position estimation requires multiple anchors for multiangulation, multilateration, or joint use of time and angle information enabling single-anchor positioning. For ToA estimation, a tight synchronization is needed between the anchors and the agents or a specific ranging protocol, e.g., two-way ranging [
4]. For AoA estimation, a synchronized array is needed at the receiver (achieving phase coherence) but the demand on synchronization between anchors and agents is less stringent [
6].
One possibility to analyze the performance of a positioning system and the influence of its parameters (e.g., signal bandwidth and geometric configuration), is to derive statistical performance bounds. A popular bound is the Cramér–Rao lower bound (CRLB), a lower bound on the achievable variance of any unbiased estimator [
7]. CRLB analyses can be classified as: (i) measurement-based CRLBs; or (ii) waveform-based CRLBs. Measurement-based CRLBs are derived from statistical models of position-related measurements extracted from received signals, e.g., the ToA, TDoA, AoA, or RSS. Therefore, measurement-based CRLBs depend heavily on the specific models used for the position-related parameters and may thus neglect relevant information for localization [
8]. Waveform-based CRLBs start at the received signal waveforms and enable to highlight the influence of signal and system parameters directly on the derived bounds. The CRLB derivations presented in this work belong to the class of waveform-based bounds, allowing to statistically characterize the impact of interfering multipath components.
An overview of measurement-based CRLBs can be found in [
9,
10,
11] which includes comparisons with a large number of estimators. In [
12,
13], a CRLB analysis of ToA based positioning in multipath is given for line-of-sight (LoS) and non-line-of-sight (NLoS) scenarios, showing that NLoS propagation can improve the positioning accuracy when prior knowledge is available. Measurement-based bounds for ToA, TDoA, AoA and RSS positioning were compared in [
14], showing that AoA and RSS schemes suffer most from increasing the anchor–agent distance.
Regarding the waveform-based class, a generic overview of different bounds is given in [
15] and specifically for time-delay-estimation in [
16]. In the following, we list references belonging to this class, beginning with single-antenna anchors and agents, and moving towards array-based studies.
Waveform-based CRLBs for positioning in additive white Gaussian noise (AWGN) channels are evaluated in [
17] for round-trip ToA, ToA and TDoA systems, showing that ToA outperforms the other two and highlighting the sensor geometry dependence. In [
18], the effect of path-overlap between multipath components is quantified by the ranging ability outage, accounting for the influence of different pulse shapes. A thorough framework for positioning in terms of the CRLB, evaluating the contribution of prior information of the channel parameters, NLoS propagation and the effect of clock asynchronism was described in [
8].
In [
19,
20], the influence of multipath interference is investigated by introducing an additional term in the channel model, called dense multipath (DM), which allows for an evaluation of the impact of multipath interference. The influence of the signal bandwidth is investigated in [
19], while the potential utilization of reflected, specular multipath components (MPCs) to increase the achievable positioning accuracy, is considered in [
20,
21]. The stochastic IEEE 802.15.4a UWB channel model is evaluated in [
3] in terms of the expectable ranging performance.
In the field of array-based positioning, the waveform-based CRLB for joint ToA and AoA radar positioning in combination with optimal sensor placement was examined in [
22], as well as for UWB signals in terms CRLB expressions for hybrid ToA-AoA positioning in [
23]. The CRLB for positioning including agent movement and showing the contribution of the Doppler shift to the obtainable AoA information was examined in [
24]. In [
8,
25], the influence of unknown array orientation on the resulting positioning accuracy is examined, allowing the inclusion of prior information about position, orientation and multipath parameters. In [
26], a polarimetric signal model is used to derive general expressions for the waveform-based CRLB for channel parameter estimation including dense multipath components, but the results were not analyzed with respect to the position estimation problem. Most recently, the performance of massive-MIMO systems equipped with mm-wave antenna arrays at the agent and anchor sides has been studied [
27,
28,
29], evaluating aspects such as the orientation estimation accuracy, the difference between uplink and downlink channels, the potential use of MPCs, and different transceiver frontend configurations.
In this paper, we extend our previous work on performance limits for high-accuracy localization in multipath channels [
19,
20] towards antenna arrays and joint ToA and AoA estimation by deriving the waveform-based CRLB. We further examine the resulting achievable positioning accuracy to be expected in dense multipath channels, exploiting these ToA and AoA estimates.
We derive a canonical expression for the Fisher information matrix (FIM), which allows a deeper insight into the dependence on the signal and system parameters, e.g., bandwidth, SNR, or number of array elements.
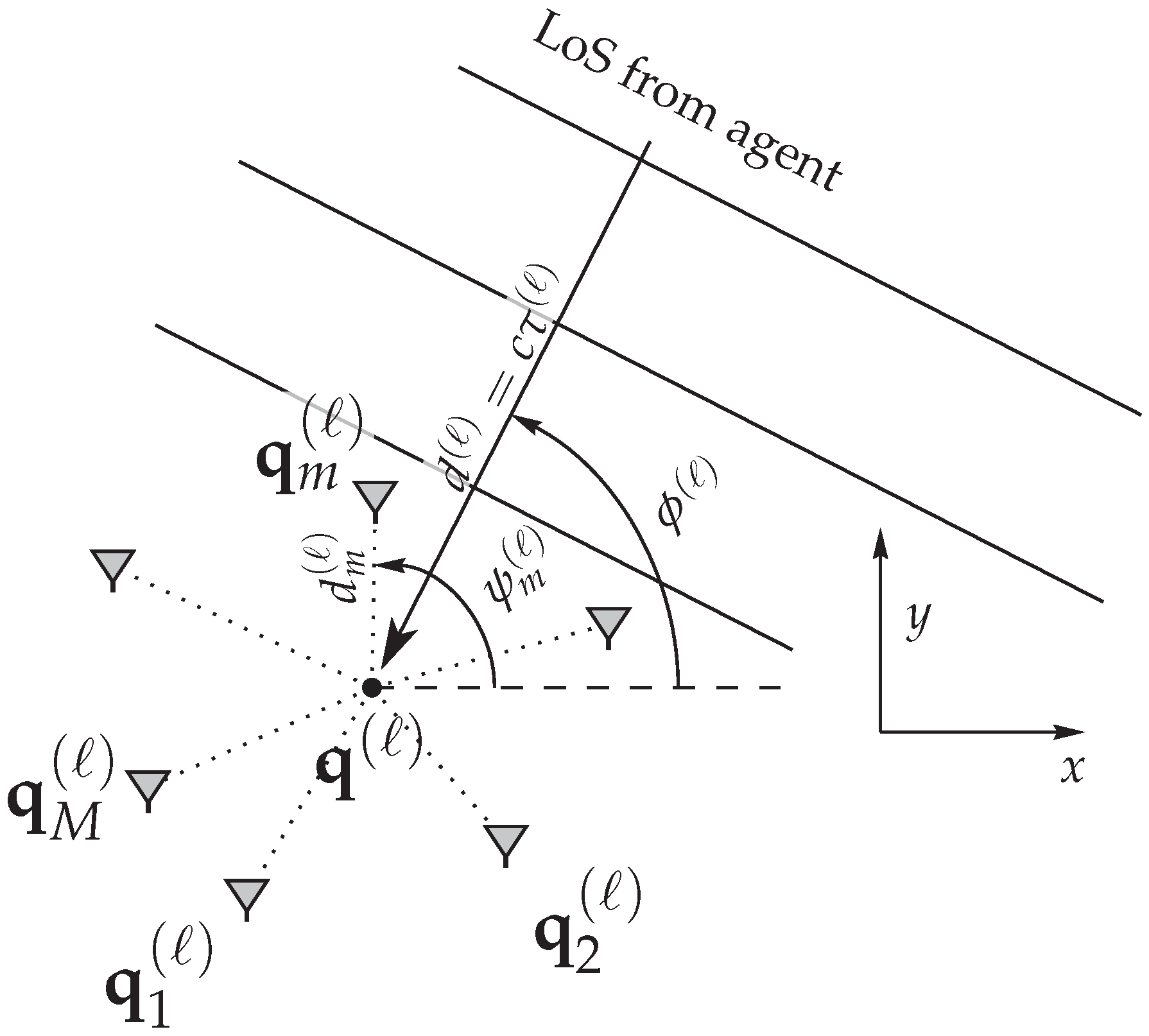
A geometric description of the generic antenna array as employed throughout this work is shown in
Figure 1. We stress that arbitrary array geometries can be used for the derivations, as long as the assumptions introduced later on remain valid. Furthermore, the analyzed signal model is very generic and can be adapted to many signaling schemes, as long as the transmitted pulse shape is known. Thus, the results are not limited to UWB signals, but are also applicable to other modulating schemes, including direct-sequence-spread-spectrum and OFDM.
A possible application of these accuracy bounds is to analyze and quantify the positioning performance limits for specific system setups, using a wide range of wireless technologies, e.g., the IEEE 802.15.4 UWB standard, the upcoming 5G systems exploiting mm-wave or massive MIMO, global navigation satellite systems, and Internet-of-things devices.
Thus, we address the following research questions:
How does dense multipath influence the position estimation based on ToA and AoA estimation?
How do the system and signal parameters influence the ToA, AoA and position estimation in presence of dense multipath?
How does “path-overlap” by specular components influence the position estimation (based on line-of-sight ToAs and AoAs) in presence of dense multipath?
The main novel aspects we present are:
We formulate the CRLB for array-based AoA estimation in presence of dense multipath (DM) and compare the CRLB for ToA estimation in such channels, providing insight on the impact of system parameters (e.g., bandwidth, antenna configuration, and carrier frequency) and radio channel parameters. (This novel aspect was previously presented at the ICL-GNSS in 2018 [
30].)
We analyze and evaluate the position error bound for a multi-anchor scenario based on joint ToA and AoA estimation, showing the trade-off between these two measurement parameters and their scaling behaviors with respect to bandwidth and anchor–agent geometry.
We formulate and analyze “path-overlap”, the interference of the useful LoS component by specular MPCs, and illustrate its impact with respect to the environment geometry.
The paper is structured as follows: In
Section 2, we introduce the signal model, including the array processing for the LoS and the DM process. In
Section 3, we derive the CRLB for ranging and angulation. Next, we numerically evaluate these two bounds, the ranging error bound (REB) and the angulation error bound (AEB) and discuss the influence of the DM process and system parameters on these bounds. In
Section 4 we derive the CRLB for positioning called position error bound (PEB). Furthermore, we extend the signal model to include multiple specular components and DM and derive the PEB again to include the effect of path-overlap. Then, we analyze and discuss the PEB for different positioning schemes, including AoA-only, ToA-only and a combined AoA-ToA version. Finally,
Section 5 concludes the paper by summing up the findings.
2. Signal Model
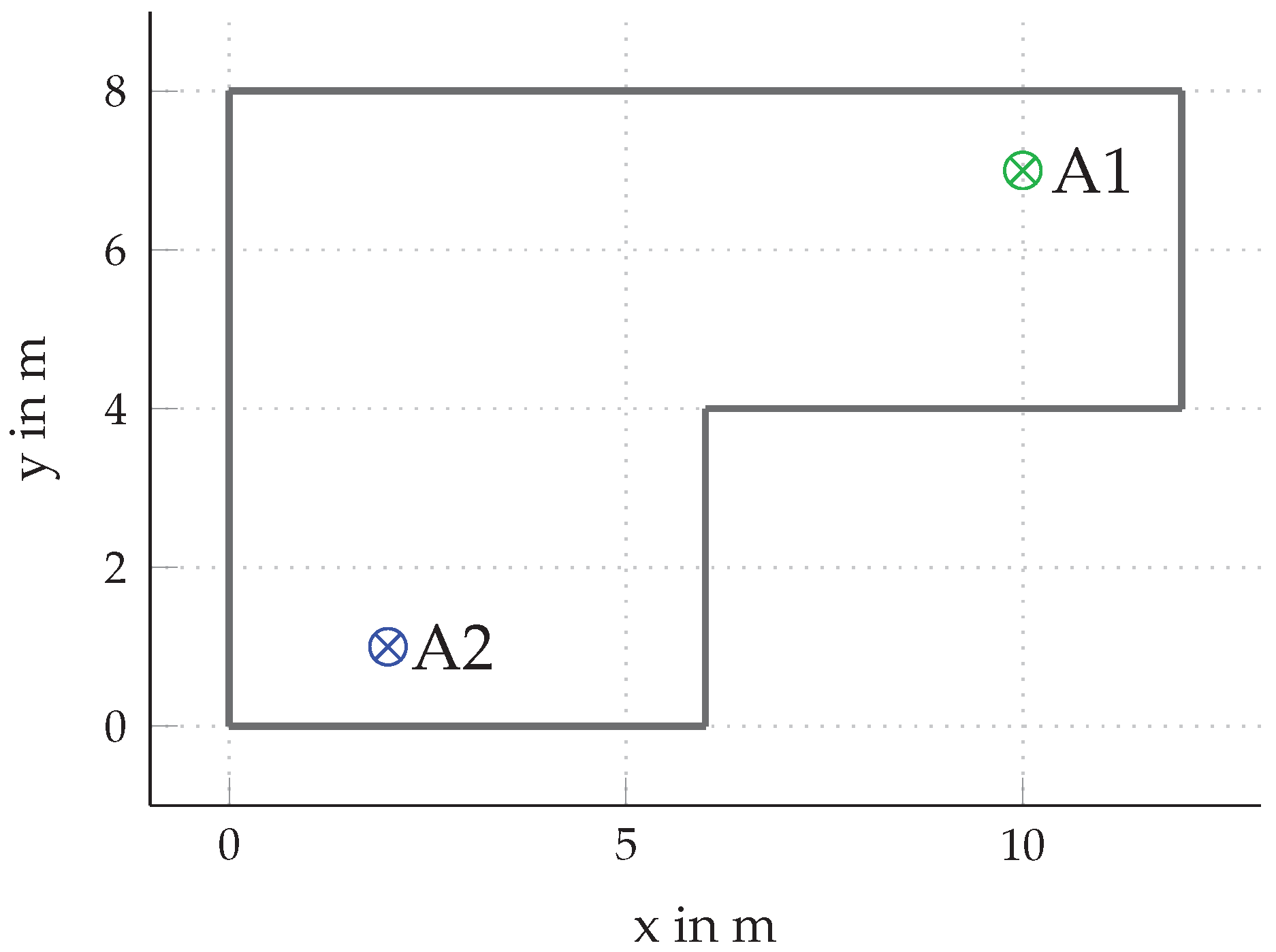
We consider the case of a single agent at an unknown position
in Cartesian coordinates which transmits a signal to an anchor
ℓ at known position
. (The theoretical framework described in this paper can be straightforwardly modified to allow for different Tx–Rx configurations.) Similar to the signal models in [
19,
24], the received signals are modeled as complex baseband equivalent signals, allowing coherent processing of the signals at each antenna element due to the explicit inclusion of the carrier phase. A known wideband signal
transmitted from an agent to the anchor
ℓ yields the received signal at array element
, with
M denoting the total number of antennas [
20]
where the first term models the deterministic line-of-sight (LoS) component with complex-valued amplitude
and time delay
at the antenna elements, and
c is the speed of light. The array geometry is depicted in
Figure 1 and described in detail in
Section 2.1.
The amplitude
is decomposed as
where
is the absolute value of the amplitude and the phase is separated into delay-dependent and random phase parts. The latter represents the unknown initial phase of the agent and any influences on the phase due to the antenna responses or other effects. We use
as the imaginary unit. We assume that the array aperture is small enough that the amplitude differences at each antenna element
m are negligibly small (Assumption S1), i.e.,
described by the approximation
with
.
The second term in Equation (
1) accounts for all occurring reflections, representing the dense multipath [
19,
20]. It is modeled by the convolution of the transmit signal
with a random process
. To characterize the process, we use the assumption of uncorrelated scattering (Assumption S2) in the delay domain [
31], through which the auto-correlation function of
can be written as
In this equation,
is the Dirac delta,
is the Kronecker delta, and
describes the power delay profile (PDP) of the DM at array element
m. For simplicity, it is assumed that the DM is uncorrelated between antenna elements
m and
(Assumption S3), which is a valid assumption under conditions of
-spaced linear arrays and uniformly distributed scatterers in 3D [
32]. It is furthermore assumed that the DM is quasi-stationary in the spatial domain, i.e., the PDP does not change in the vicinity of
the DM only depends on the agent position
and anchor reference point
, resulting in an identical PDP shape at each array element (Assumption S4). Similar to Witrisal et al. [
19], we model the DM process
by a zero-mean Gaussian process.
The last term in Equation (
1),
, describes additive white Gaussian noise with double-sided power spectral density of
.
In this section, we introduced Assumptions (S1)–(S4). When we invoke one of these assumptions in the following sections, we reference to the specific assumptions.
2.1. Relation to Array Geometry
An overview of the array geometry is shown in
Figure 1, which is similar to [
24]. For simplicity—and in accordance with many practical scenarios—we assume that anchor and agent are located on a plane, removing the need for estimating the elevation angle. The extension to three dimensions in terms of environment as well as arrays is straightforward. For some given array, the time delay, corresponding to the received signals
at element
m, is related to the array geometry by
where
is the time delay, termed time-of-arrival (ToA), from the agent location
to an arbitrarily chosen array reference point
related to the range
. The AoA
is measured with respect to the known array orientation and given by
. The distance and angle of element
m from the reference point
are
and
, respectively. The position of an array element
from the reference point is
As shown below, the most practical choice of the reference point is the center of gravity of the antenna element positions (see also [
23,
25]).
For the sake of a more concise notation, we omit the anchor index ℓ in the following, proceeding with a single-anchor scenario, and reintroduce it when needed.
3. Cramér–Rao Lower Bound for AoA and ToA
A popular measure for evaluating estimator performance is the Cramér–Rao lower bound (CRLB) which gives a lower bound on the achievable variance of any unbiased estimator. Before we examine the position error bound (PEB), we perform a separate evaluation of the ranging error bound (REB) and the angulation error bound (AEB).
The general form of the Fisher information matrix (FIM) for a parameter vector
that parameterizes the probability density
for an observation
becomes [
7,
33]
from which the CRLB for an estimator
of said parameter vector is defined as
The operation
on two matrices indicates that the matrix
is positive semidefinite.
The parameter vector for the setup as shown in
Figure 1 is
, where
and
are the real and imaginary parts of the LoS amplitude
.
Under the Gaussian model, the likelihood function for the received signal vector
at array element
m is
where
is the overall covariance matrix of the sampled noise processes at element
m,
is an
identity matrix and
is the noise variance. The covariance of the DM component can be written in matrix notation as
, where
is the convolution matrix of the sampled pulses
and
is the correlation matrix of the DM at element
m, which is a diagonal matrix under the uncorrelated scattering (US) Assumption (S2).
Similar to Witrisal et al. [
19], we use an eigendecomposition of the covariance matrix
to write it as
where
and
are the
ith eigenvector and corresponding eigenvalue of
which make up the
ith column of
and diagonal element of
. We further introduce a weighted inner product defined as
and the induced norm as
for a Hilbert space
characterized by a specific covariance matrix
(see Appendix in [
19]). The weighting can be interpreted as a whitening operation.
A straightforward result from Equations (
3) and (
4) is that the transmitted signals have equal induced norms, i.e.,
, due to the identical shape of the DM PDP at each element
m. This allows us to omit the index
m in
with
being a sampled version of
.
3.1. Fisher Information Matrix
The main ingredient to compute the CRLB is the Fisher information matrix, alongside some restrictions imposed on the likelihood function to be able to arrive at a closed form solution [
7]. Inserting Equation (
9) into Equation (
7), we obtain the
Fisher information matrix
for the parameter vector
as
which allows a separate examination of the information added by each array element. By separating the full FIM into sub-blocks for desired parameters
and
and nuisance parameters
and
, we obtain
where the block matrices are
The zero elements of the block matrices are due to the chosen array reference point and the resulting contribution of each array element’s FIM [
23], which is shortly demonstrated in
Appendix A.
To gain insight into the parameters of interest, we use the equivalent Fisher information matrix (EFIM), which is well established in the literature [
8,
19,
24]. As we focus on AoA and ToA estimation, we obtain the corresponding EFIM
for the truncated parameter vector
by applying the Schur complement on Equation (
14)
The connection between EFIM and CRLB is then
The structure of the FIM in Equation (
14) indicates that the estimation of the ToA
and AoA
of the LoS component in DM are decoupled. The structure of
further shows that the estimation of the LoS amplitude
only influences the estimation of
. Further insights are examined in the following sections in terms of the achievable bounds on ToA and AoA, as well as the resulting positioning accuracy in terms of the PEB.
3.2. Ranging Error Bound (REB)
By evaluating Equation (
18), we obtain the ranging error bound (REB)
, which is the square root of the lower bound
of the variance for estimating the time delay of the LoS component.
The result for the REB is very similar to the one shown in [
19], the only difference being the scaling by the number of antenna elements
M. The EFIM for the range estimation problem is
where
is the mean-squared bandwidth [
34] defined as
for a normalized pulse
and
being the sampled derivative of the pulse with respect to
. The parameter
is a “whitening gain” for the delay estimation, representing the increased ranging information due to the whitening operation introduced in Equations (
11) and (
12) (cf., [
19]), defined as
, where
is the corresponding mean squared bandwidth of the “whitened” pulse, defined as
. The factor
is a loss factor attributable to the estimation of the nuisance parameter
, arising from the distortion of
through the whitening operation (see
Appendix A and [
19]), where
is the angle between
and
in the corresponding Hilbert space
. The factors
and
in Equations (
20) and (
21) describe the signal-to-interference-plus-noise-ratio (SINR) and the effective SINR for the delay estimation, respectively. For negligible DM, which defaults to the AWGN case, Equation (
20) simplifies to the known CRLB for delay estimation [
7] (Ch. 3) with
M independent observations
and signal-to-noise-ratio
. Introducing the DM, it holds that
(see Equation (
12) and
Section 3.4).
3.3. Angulation Error Bound (AEB)
In a similar fashion as for the REB, we obtain the angulation error bound (AEB)
from Equation (
18), which denotes the lower bound of the achievable variance
for estimating the AoA of the LoS component. The EFIM element for the angle estimation problem is
In Equation (
23),
is the whitening gain for the AEB, and
is a factor determined by the array geometry. In Equation (
24), the SINR and the whitening gain for the AEB are combined into the effective SINR for the angle estimation
. The EFIM for the negligible DM case is given by [
28]
In contrast to the REB, the AEB can be simplified to obtain a more intuitive expression. The bandwidth term
is negligible due to the usually much higher carrier frequency, i.e.,
, resulting in
and further in
such that we find the AEB to be proportional to
By setting the carrier frequency in relation to the array geometry, we can define a normalized squared array aperture
which captures all the system parameters that influence the AEB. It is defined as
Geometric interpretation of the AEB: As becomes obvious when comparing the REB (Equation (
20)) with the AEB (Equations (
23) and (
29)), the latter depends on the direction
. For a uniform linear array (ULA), the CRLB is larger from end-fire direction, i.e., for signals impinging parallel to the array axis, and lower for sources from broadside direction, i.e., perpendicular to the array axis.
Special case M-ary ULA: For an
M-ary ULA with inter-element spacing of
and resulting
, oriented parallel to the
y-axis, i.e.,
, Equation (
30) is found to be
According to Equation (
33), sources from end-fire direction have infinite AEB. As angle estimation is bounded, e.g., for ULAs to
, the angulation error approaches a uniform distribution on the defined range as the AoA
approaches end-fire direction.
3.4. Numerical Evaluation of AEB and REB
3.4.1. Simulation Environment
The theoretical bounds for AEB and REB derived in the previous sections were evaluated numerically and validated using simulations. The evaluation was performed for different pulse bandwidths
of the transmitted signals, where
is the duration of the transmit pulse. We assumed that the PDP exhibits a double-exponential shape [
19,
35] with parameters
,
,
,
and
. For simplicity, we used an
M-ary ULA with inter-element spacing of
in the simulations, although the theoretical bounds are valid for arbitrary arrays as long as Assumptions (S1)–(S4) are valid. As we linked the inter-element spacing to the carrier frequency
, we kept
fixed.
As transmit pulse , a root-raised-cosine (RRC) pulse was used, as it is often encountered in wireless communications. We set the roll-off factor to and used the corresponding minimum sampling rate needed to avoid aliasing throughout the simulations.
3.4.2. Simulation Results
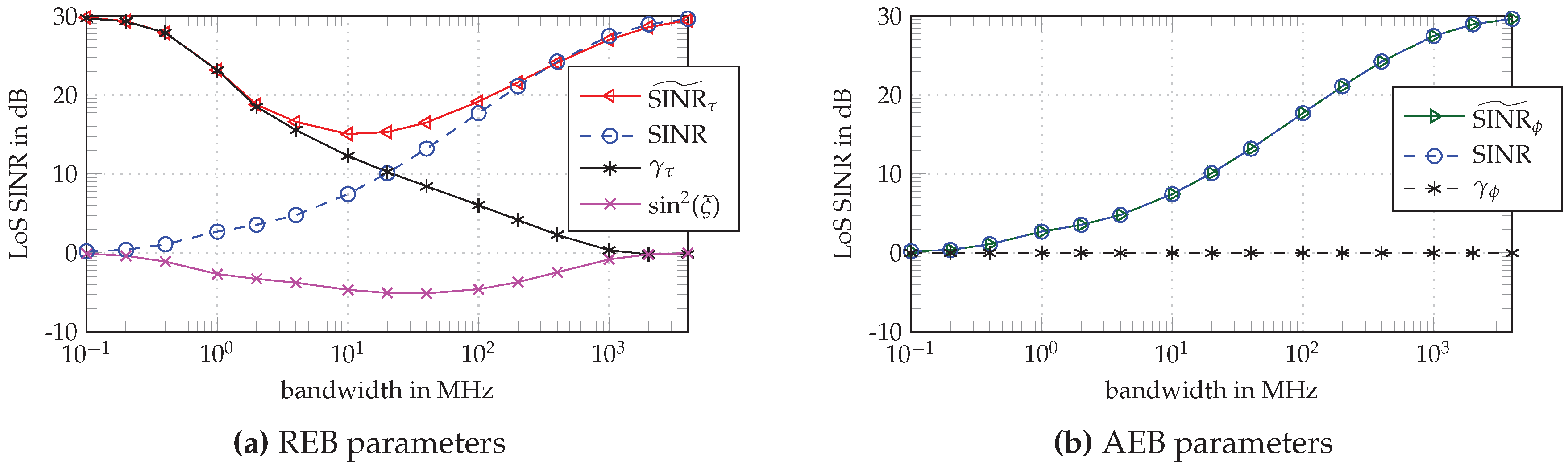
In
Figure 2, the EFIM parameters are depicted as a function of the bandwidth according to Equations (
20) and (
23), separated into parameters for the REB shown in
Figure 2a and for the AEB in
Figure 2b. In both subfigures, the SINR tends towards the Rician K-factor of the channel at narrow and to the SNR at high bandwidth (BW), which relates to the fading of the LoS signal component in a DM-channel: At high BW, the LoS is separated from the DM such that no fading occurs, while at low BW the complete DM interferes with the LoS leading to a flat fading channel. This implies that the “detectability” of the LoS component is linked to the SINR. The loss factor
observable in the REB and shown in
Figure 2a quantifies the SINR that is lost due to estimating the nuisance parameter
in the presence of the non-white, non-stationary DM process
[
19].
The whitening gain
quantifies the SINR gain due to the whitening operation, where the known DM statistics are critical to whiten the observed signal, suppressing the DM. Note that it behaves complementary to the SINR curve (see
Figure 2a). The effective SINR for the delay estimation,
, summarizes these parameters. It shows the same behavior as the SINR for high BW, while, for small BW, it increases towards the SNR, again due to the whitening gain. The effective
is thus tied to the distortion effect of the DM. At high and low BW, no pulse distortion occurs as either the DM is separated from the LoS component or it interferes with it completely. However, at intermediate BW, the distortion effect reduces the effective SINR for the delay estimation [
19].
For the angle estimation problem (see
Figure 2b), no significant whitening gain is possible, as the factor
does not substantially exceed 1. Remember that
at typical carrier frequencies of radio signals. Furthermore, at typical carrier frequencies, if the fractional BW is high, also the absolute BW is high, meaning that the factor
is small. Thus, the whitening factor
is approximately 1, which in turn ties the effective
for the angle estimation to the SINR, as assumed in Equation (
29).
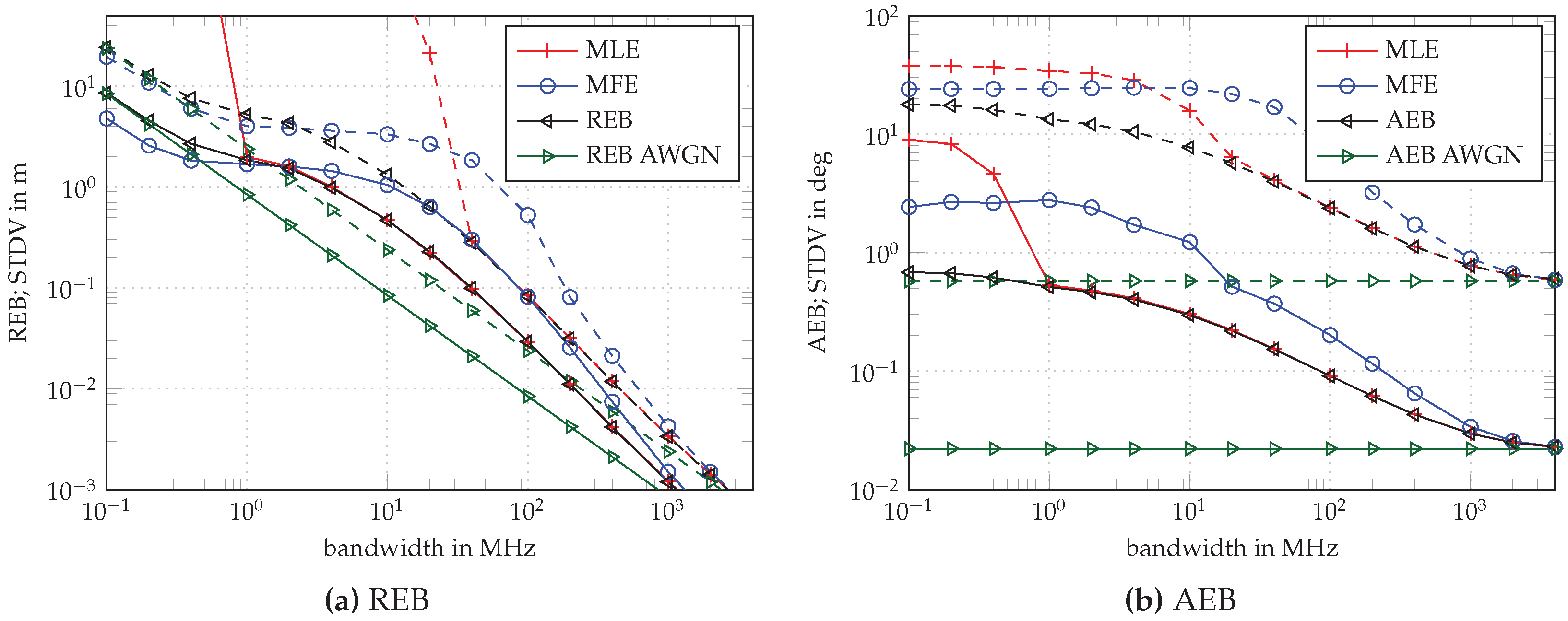
The results for the REB and the AEB are shown in
Figure 3 for ULAs with
and
elements (dashed and solid, respectively), spaced by
. The CRLB for AWGN-only in green and AWGN-plus-DM in black is compared to the standard deviation achieved by two types of estimators: results for a matched filter estimator (MFE) are indicated in blue and for a maximum likelihood estimator (MLE) in red.
In accordance with the results in [
19], the MFE starts to deviate from the theoretical bound below a BW of 400 MHz, whereas the MLE follows the bound down to
for
and down to
for M = 16 (see
Figure 3a). The MLE follows the bound longer due to the whitening operation which assumes known AWGN and DM statistics. For an increasing number of antenna elements
M, the MLE follows the REB much longer due to the diversity gain, i.e., due to the M-fold increase of the SINR by performing multiple measurements with
M antenna array elements. The REB improves correspondingly with
.
In the case of lower BW, the MFE again converges to the bound as the MFE starts to make use of the DM and LoS power. It even outperforms the REB, which is somewhat pessimistic at low bandwidth due to the neglected trace-term in the derivation of the FIM (see
Appendix A). For a numerical evaluation of this effect, see [
19]. The whitening operation of the MLE on the other hand reduces the SNR [
19] at low BW, as already discussed.
The effect of the DM on the AEB is different to that on the REB: the DM causes the AEB to deviate from the AWGN bound below 1 GHz, but the whitening operation does not influence the AEB. The estimators perform similarly (see
Figure 3b): The MFE leaves the bound at higher BW and returns to it at lower BW. The MLE follows the AEB down to
and
corresponding to the detectability of the LoS component within the noise, after the whitening. Again, the diversity gain is evident by the improved convergence for
in comparison with
. The improvement of AoA accuracy, when comparing the results for
and
, is attributed to the normalized squared array aperture
as shown in Equation (
33), which directly depends on the total number
M of
-spaced array elements.
An important observation from the theoretical results is the fact that the performance of both (ToA and AoA) estimators is limited by the influence of DM. Increasing the SNR of the radio signal will not improve the performance, while antenna diversity will help. Furthermore, we would like to emphasize the influence of the DM on the AEB, especially at smaller bandwidths. While the AWGN AEB does not depend on the bandwidth, we show that, by considering the influence of the DM, the AEB depends on the bandwidth (see
Figure 3b).
5. Conclusions
The ranging and angulation error bounds (REB and AEB, respectively) were evaluated for time-of-arrival (ToA) and angle-of-arrival (AoA) estimation in dense multipath channels, examining the influence of the number and geometry of array elements as well as the effect of the bandwidth of the transmitted signal. Simulation results are presented for a matched filter estimator (MFE) and a maximum likelihood estimator (MLE), validating these results. Furthermore, the positioning performance was analyzed, considering these two measurement types, multiple anchors, and the influence of path-overlap by specular multipath components (MPCs).
The multipath signal model makes our numerical results significantly more realistic than previous analytical results. Most notably, it is shown that, due to the impact of dense multipath, the achievable accuracy for AoA estimation becomes bandwidth dependent. This is a novel finding and stands in contrast to the known results for the AWGN-only channel, where the AoA accuracy appears to be widely independent of the employed signal bandwidth. Specifically, the AEB scales with the squared array aperture, the number of array-antenna elements, and the signal-to-interference-plus-noise ratio (SINR). The REB scales with the squared signal bandwidth, the number of antennas, and the SINR. The SINR itself quantifies the influence of the dense multipath. It also scales with the bandwidth, because the interfering multipath can be better resolved at a higher signal bandwidth. The relevance of our work lies in the exact numerical quantification of these different influencing factors, which allows for the evaluation of trade-offs between various system configurations under realistic channel conditions.
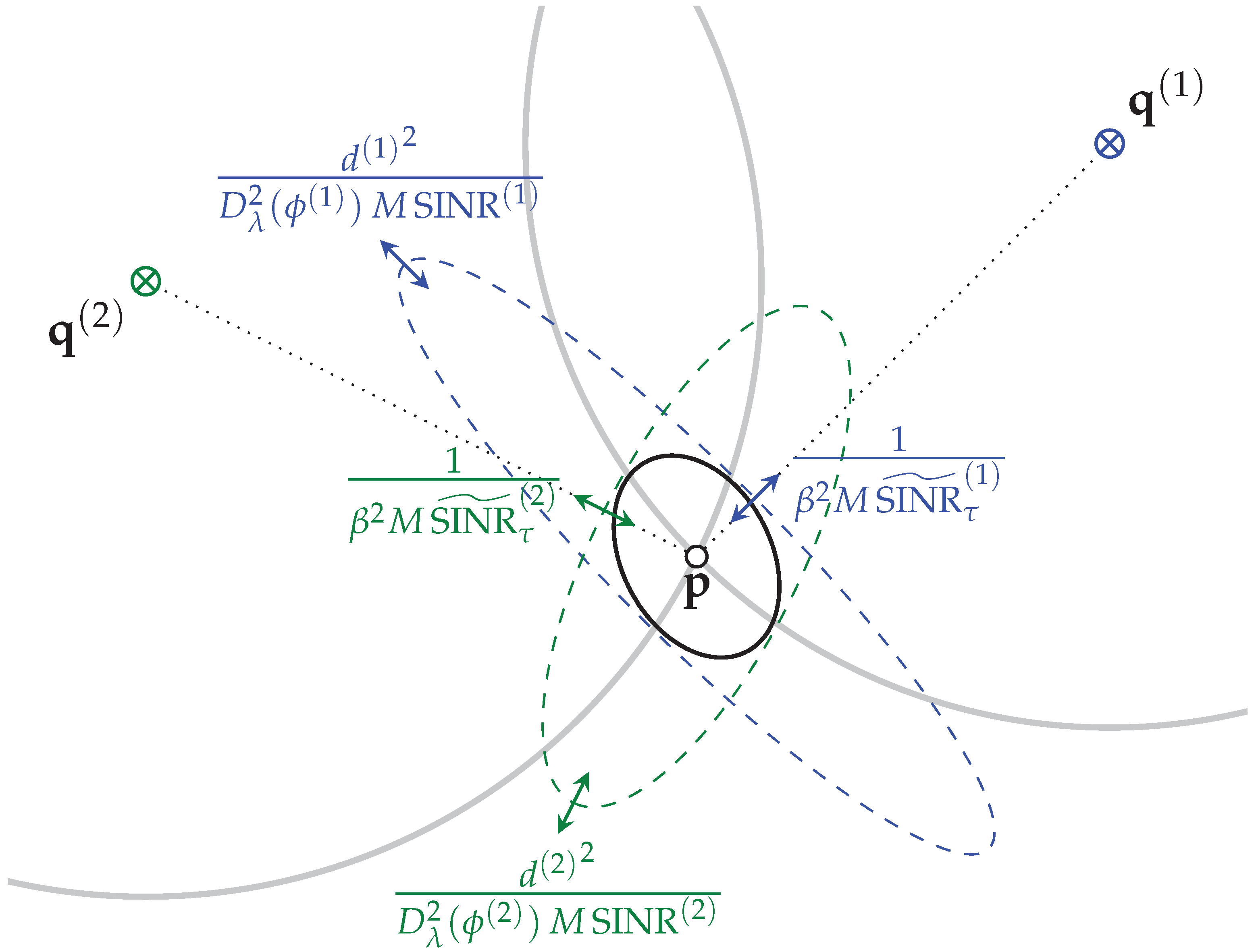
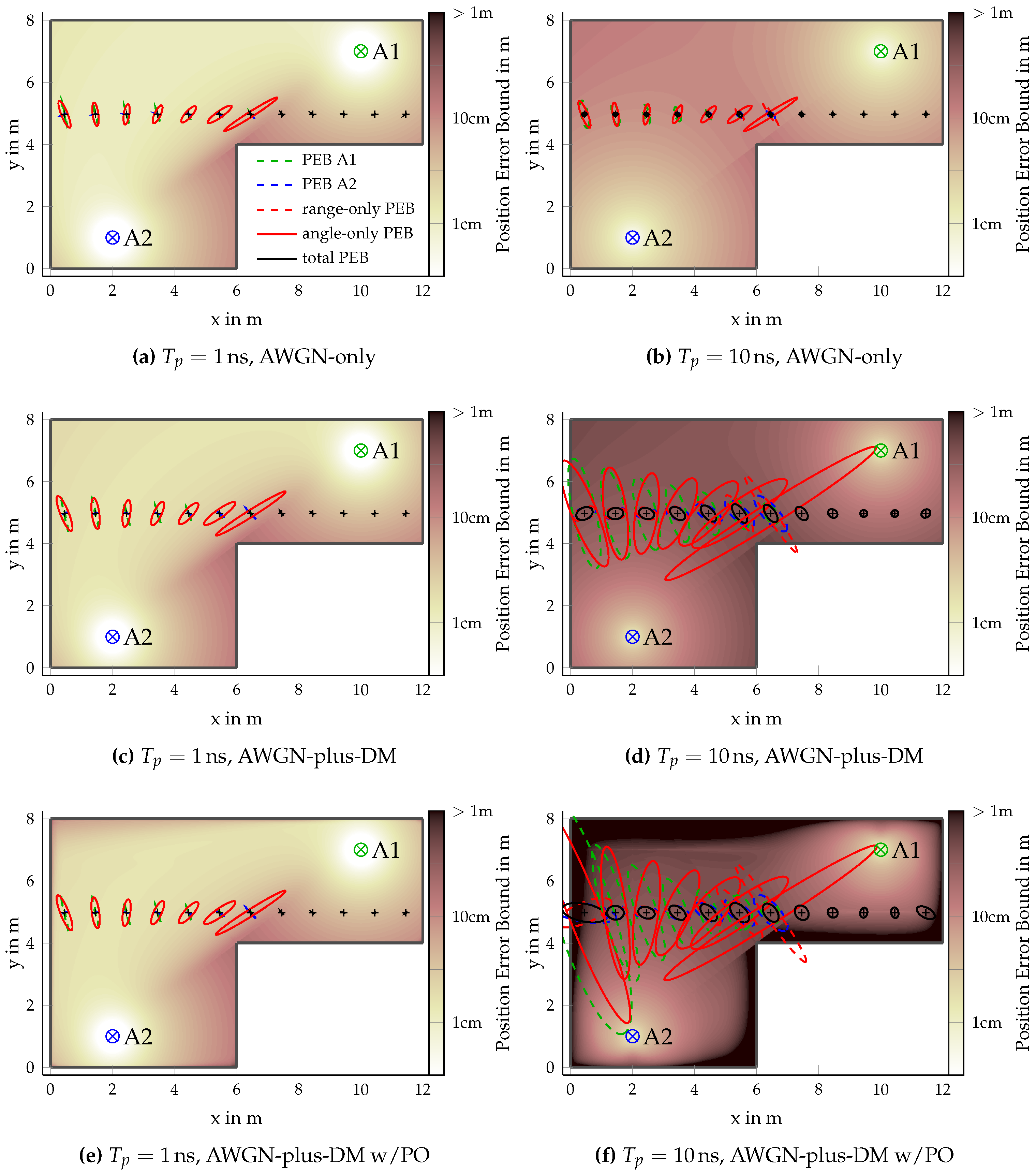
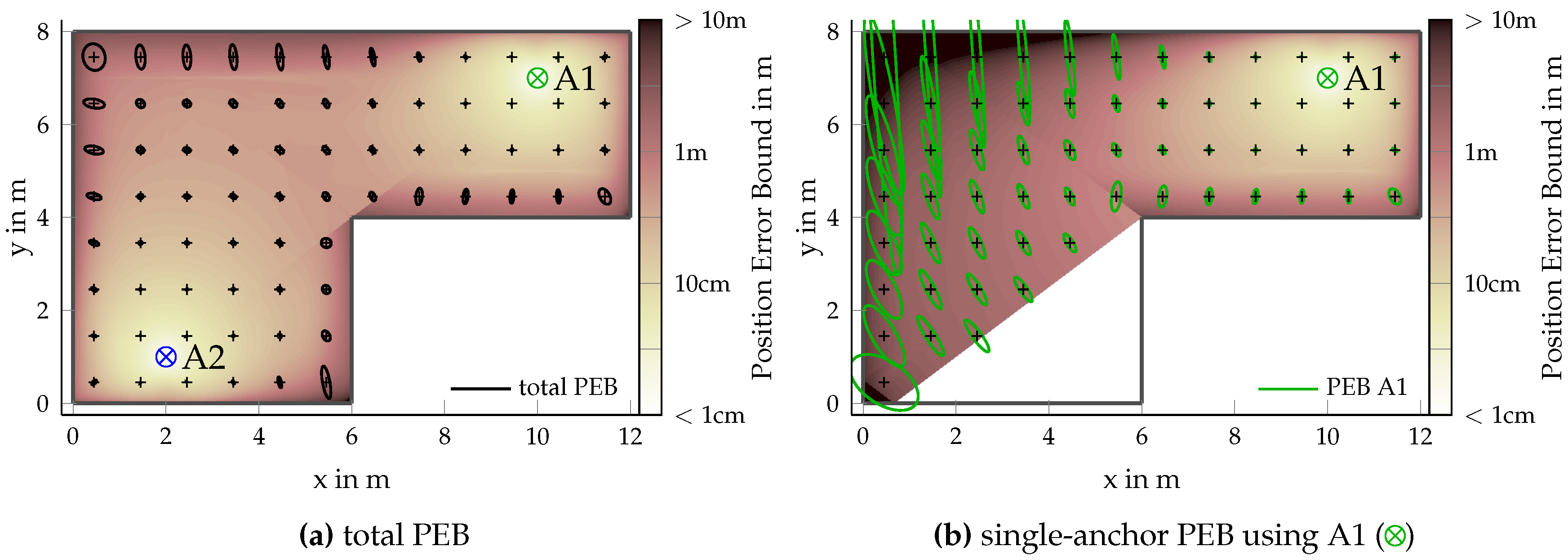
The analysis of the position error bound (PEB) illustrates the relationship between the ToA and AoA information in multi-anchor positioning scenarios and the influence of the anchor–agent placement. The different measurement types can complement one another. The AoA will be most useful at close range—allowing for accurate single-anchor positioning at close range—while, at far range, only the ranging information remains accurate. Interfering specular multipath components have a maximum detrimental influence near the walls.
Future work may couple the presented theoretical framework with a detailed, parameterized channel model of the application environment to study the expected, site-specific positioning performance as a function of a wide range of system parameters.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}







