Design and Analysis of a Quasi-Yagi Antenna for an Indoor Location Tracking System

Abstract
1. Introduction
2. Fabrication and Analysis of the Antenna
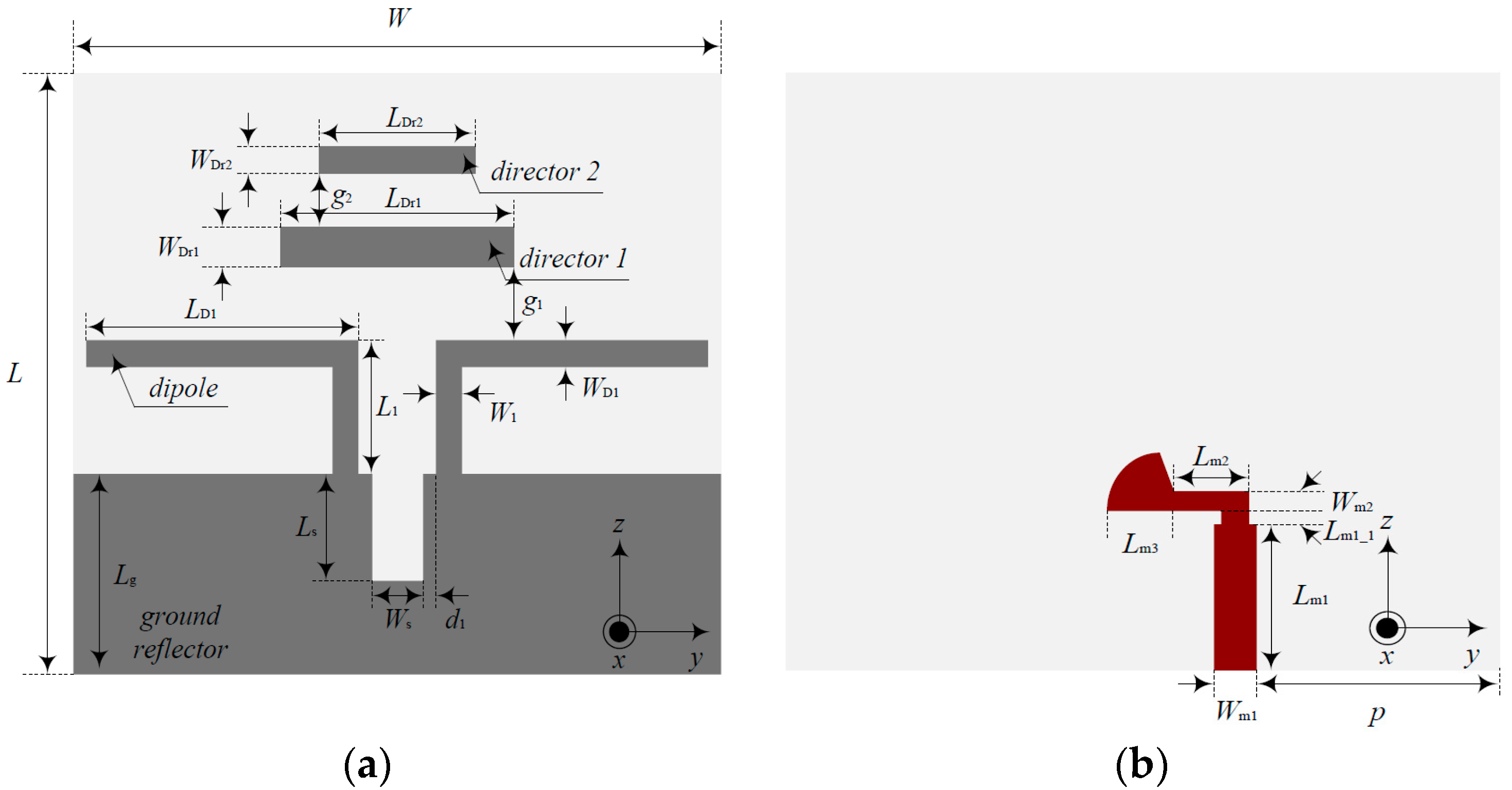
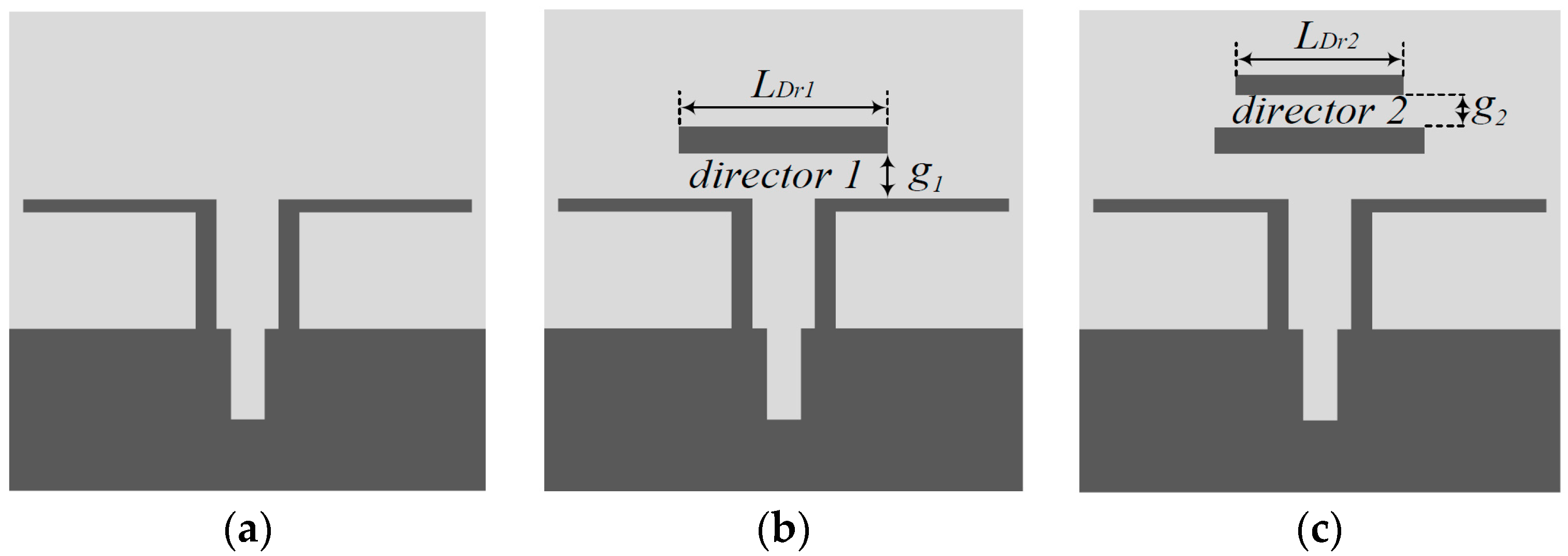
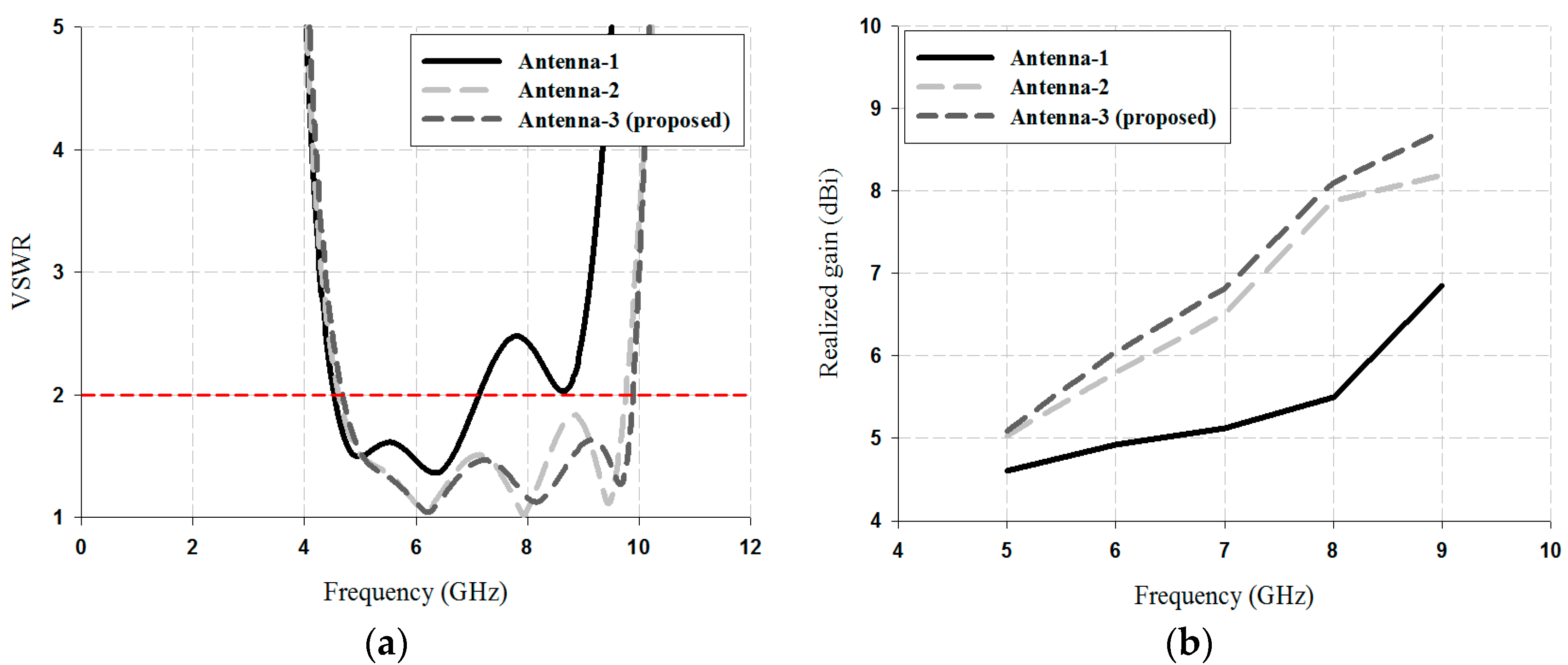
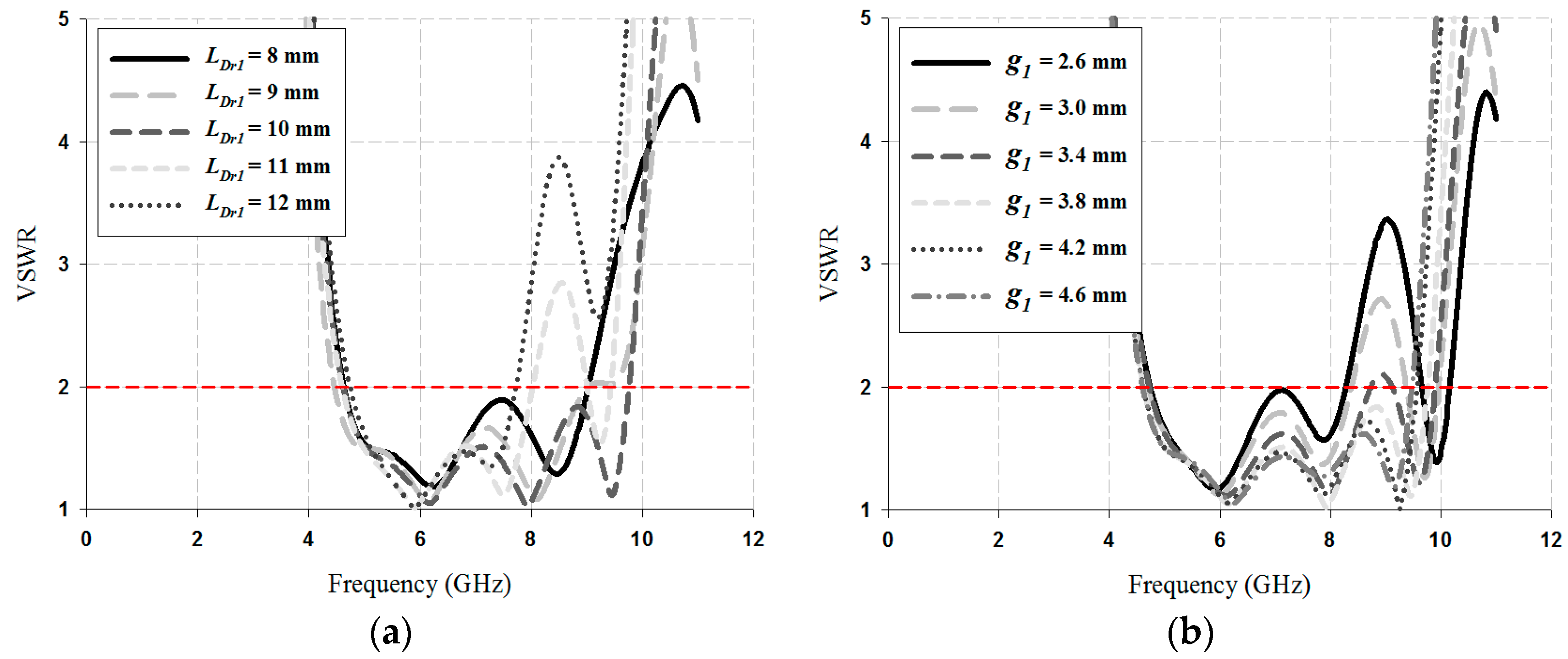
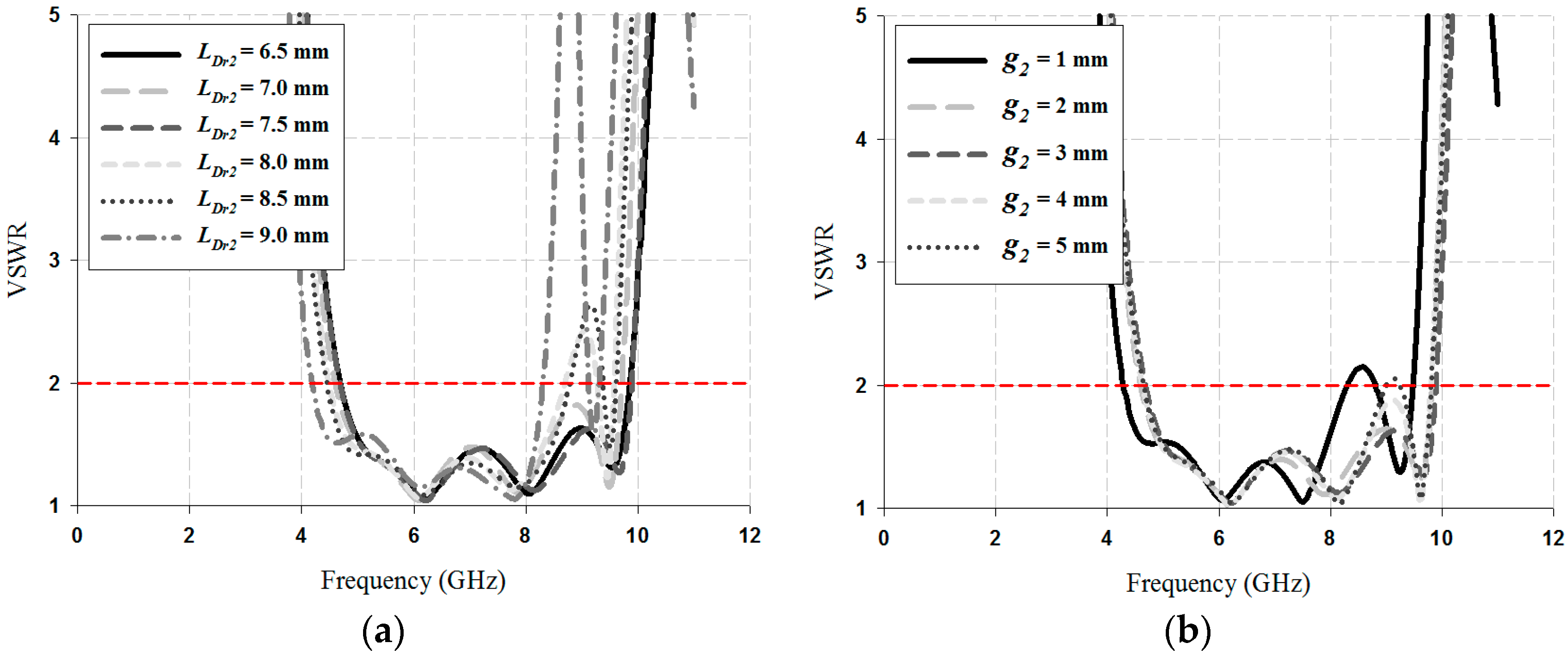
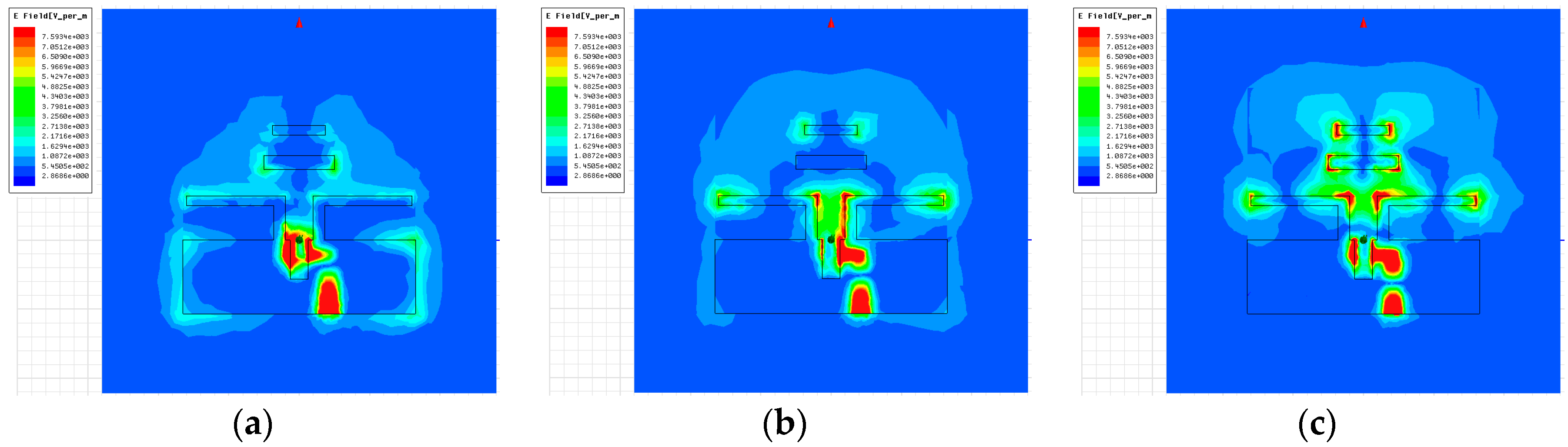
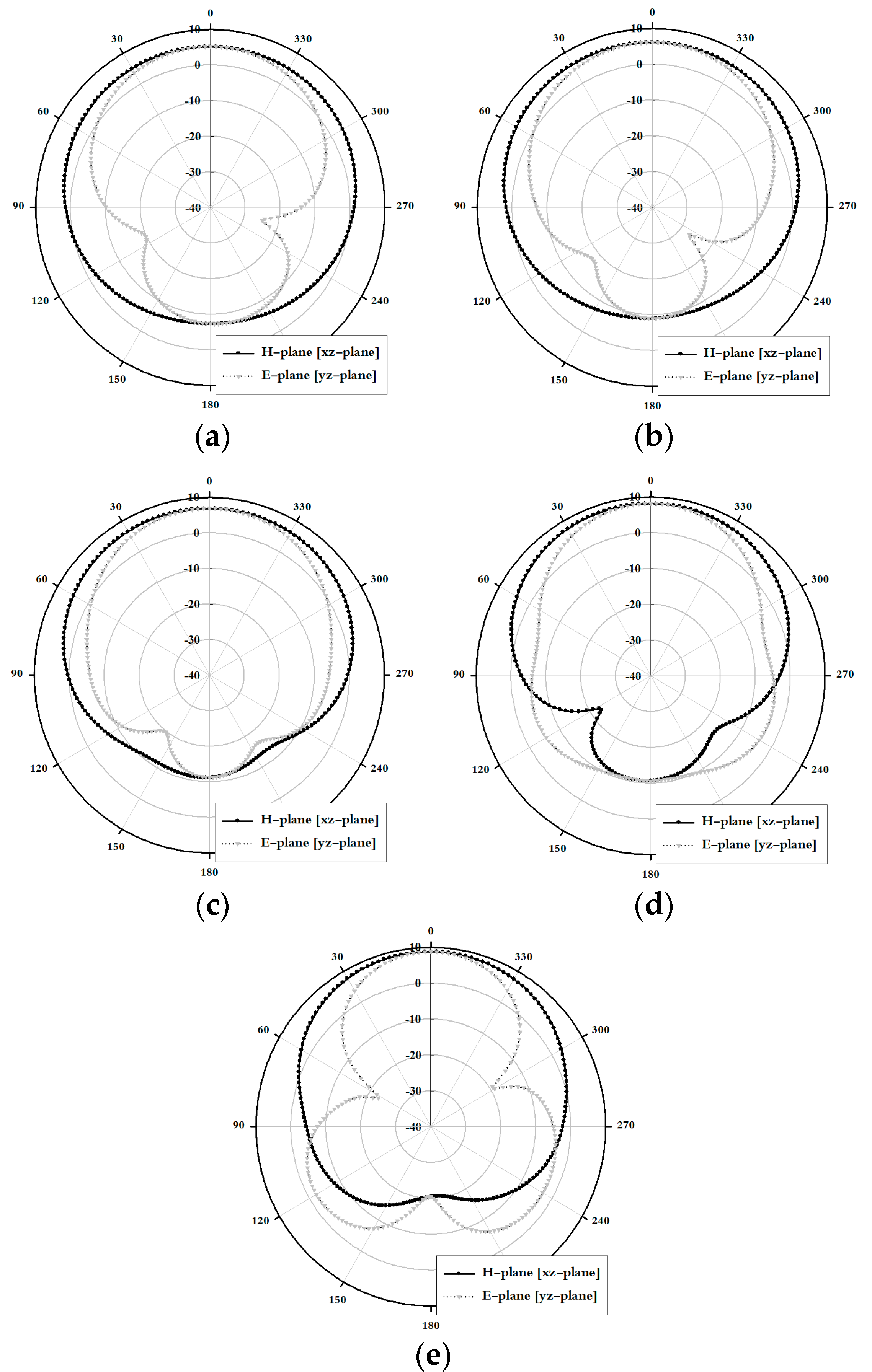
2.1. Design and Simulation of the Antenna
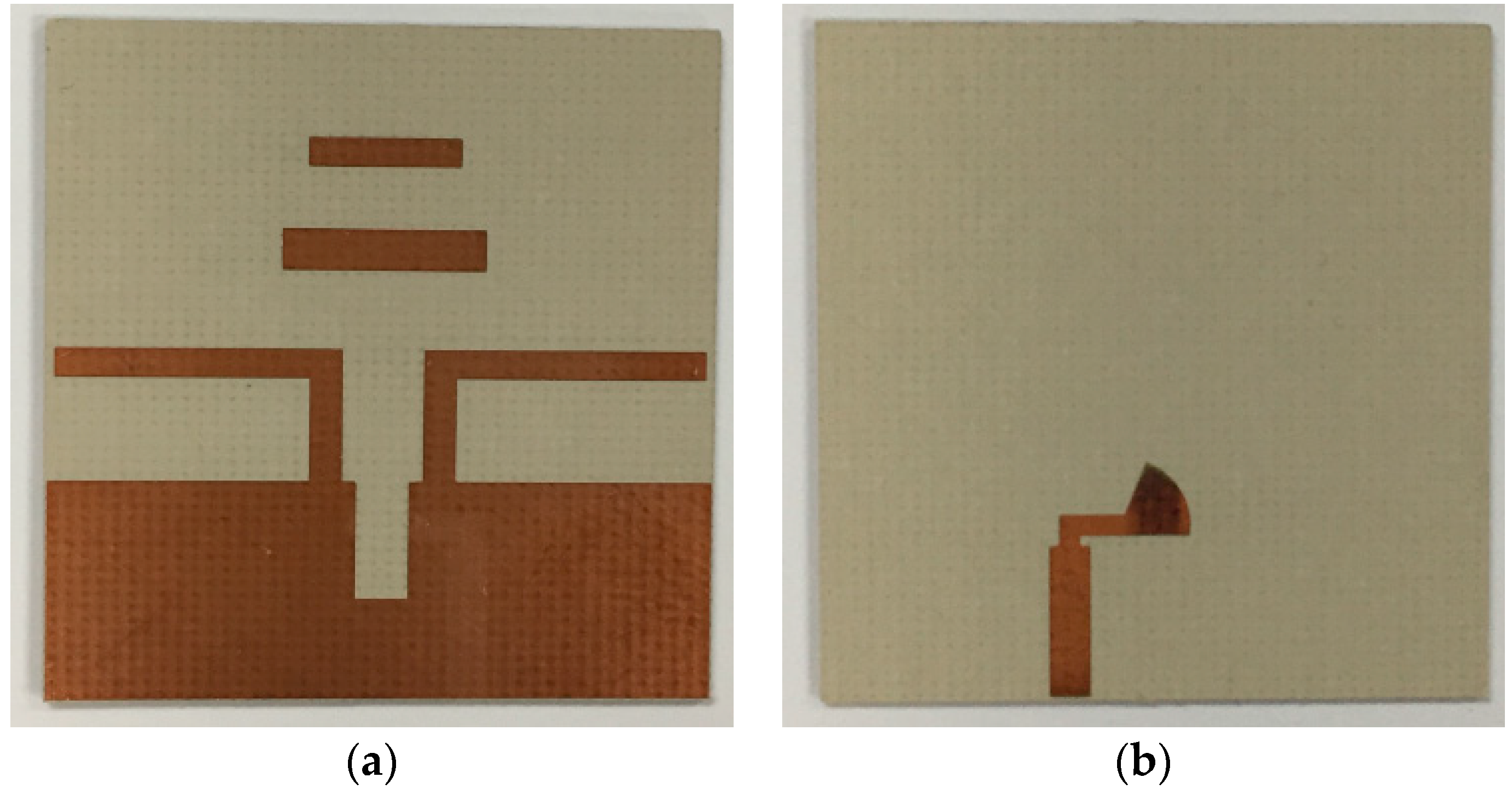
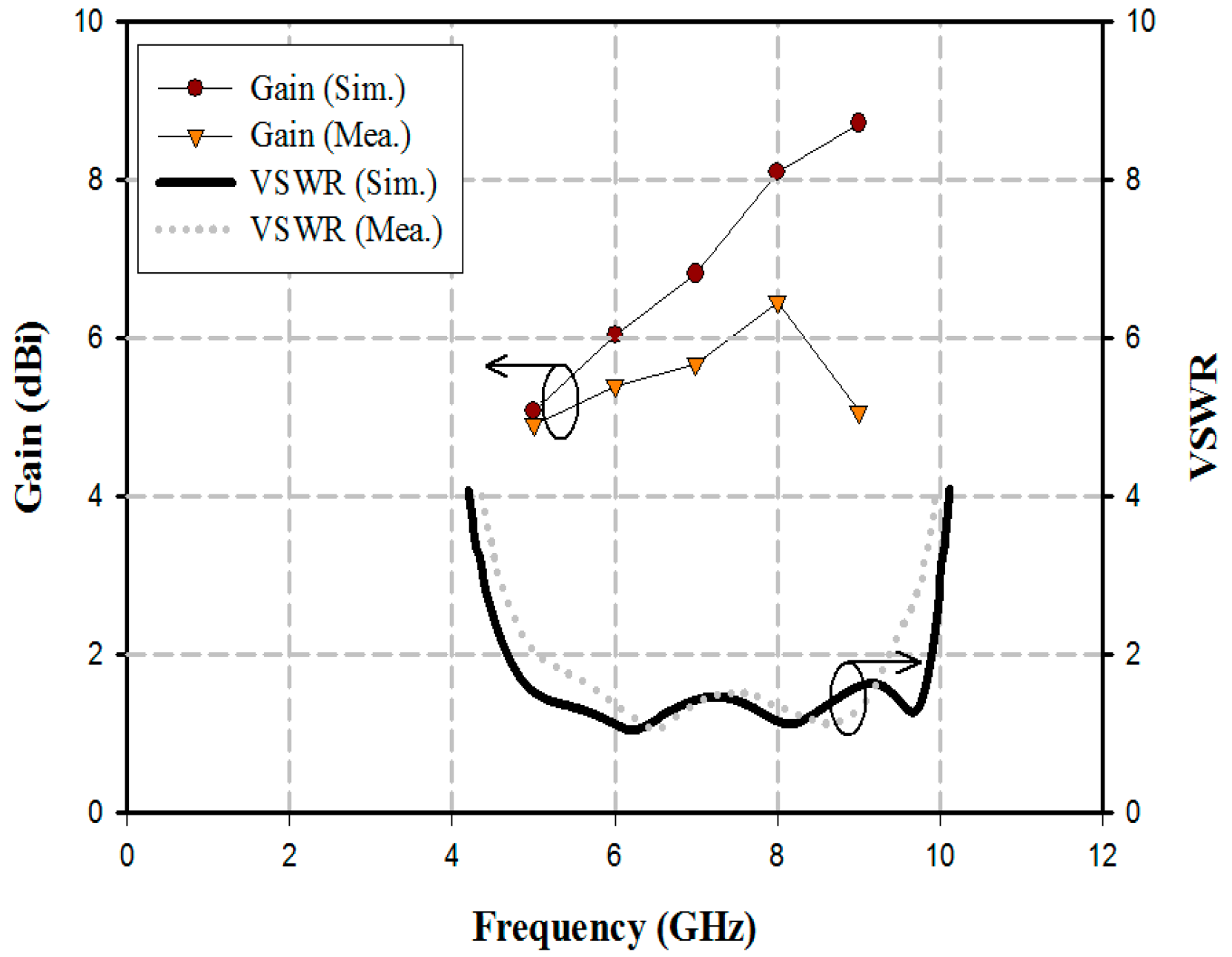
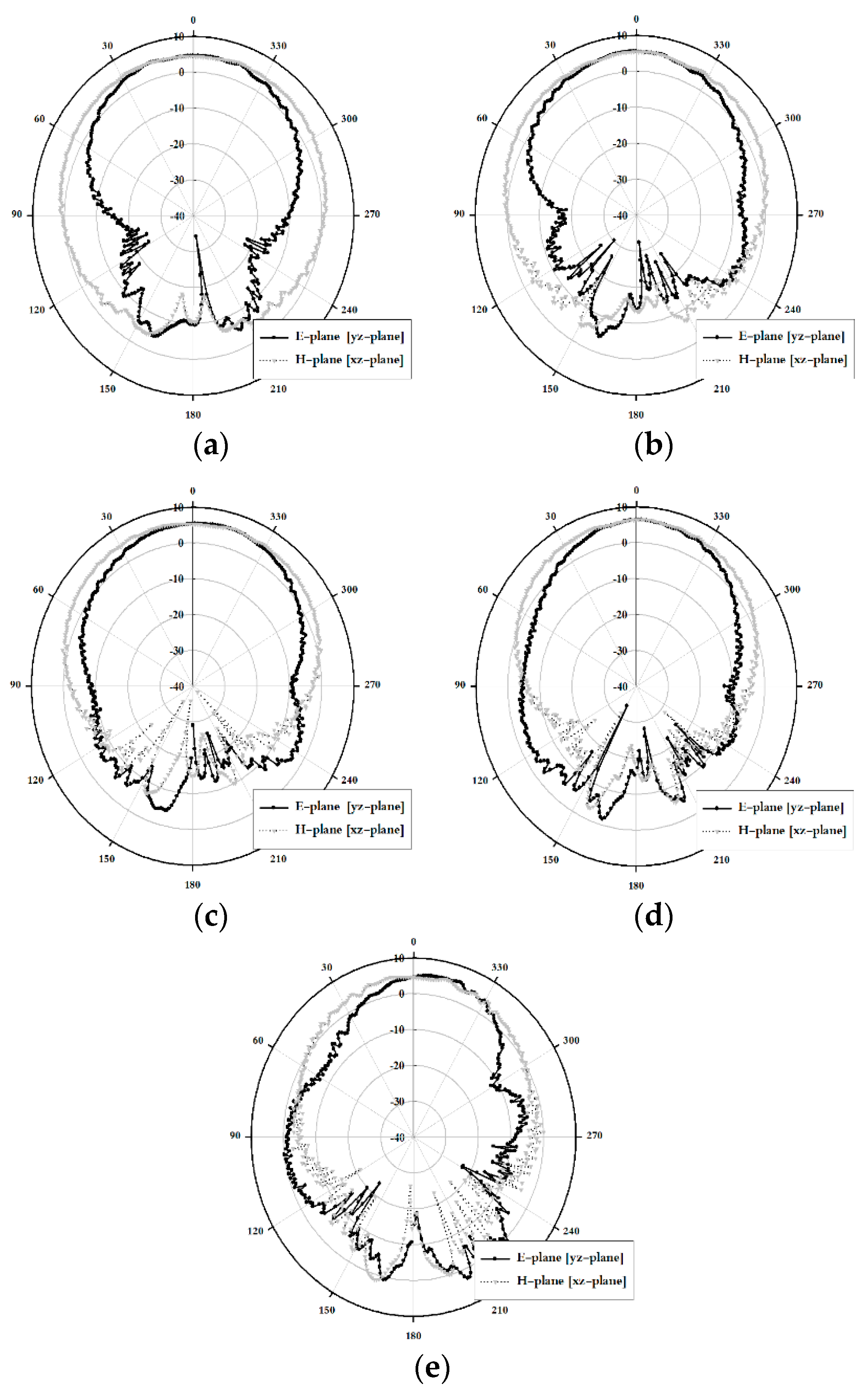
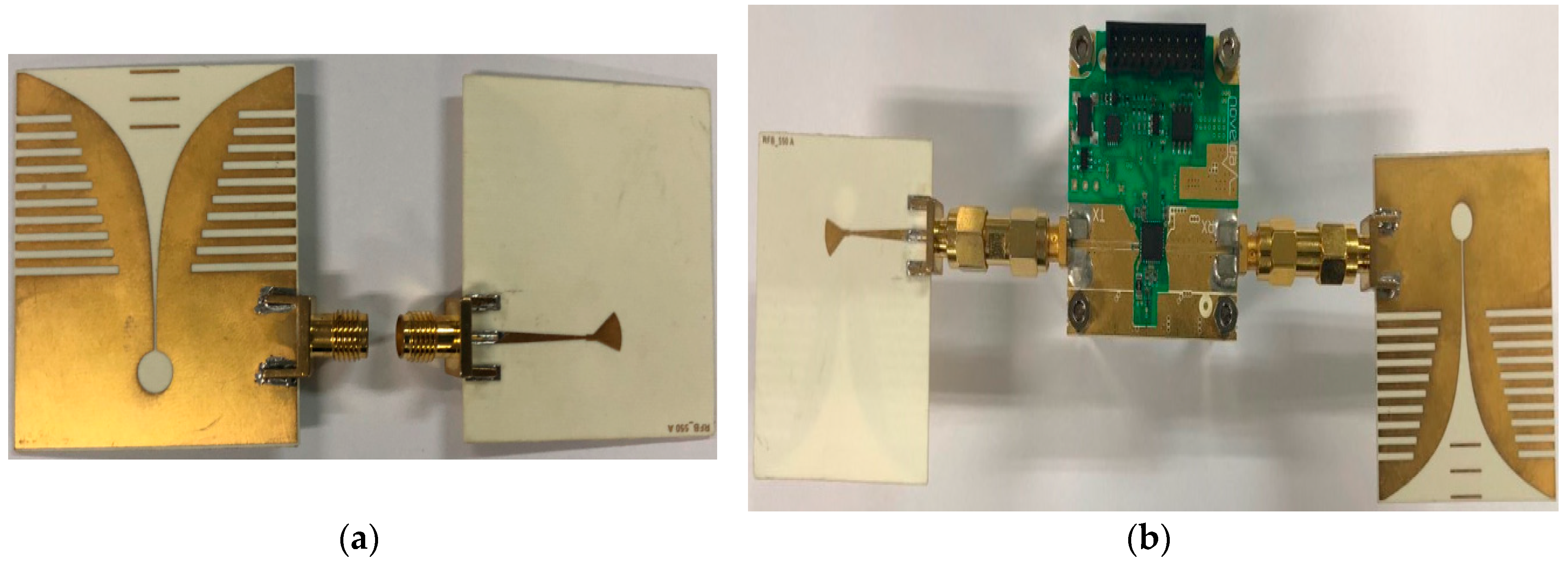
2.2. Measurement Analysis of the Fabricated Antenna
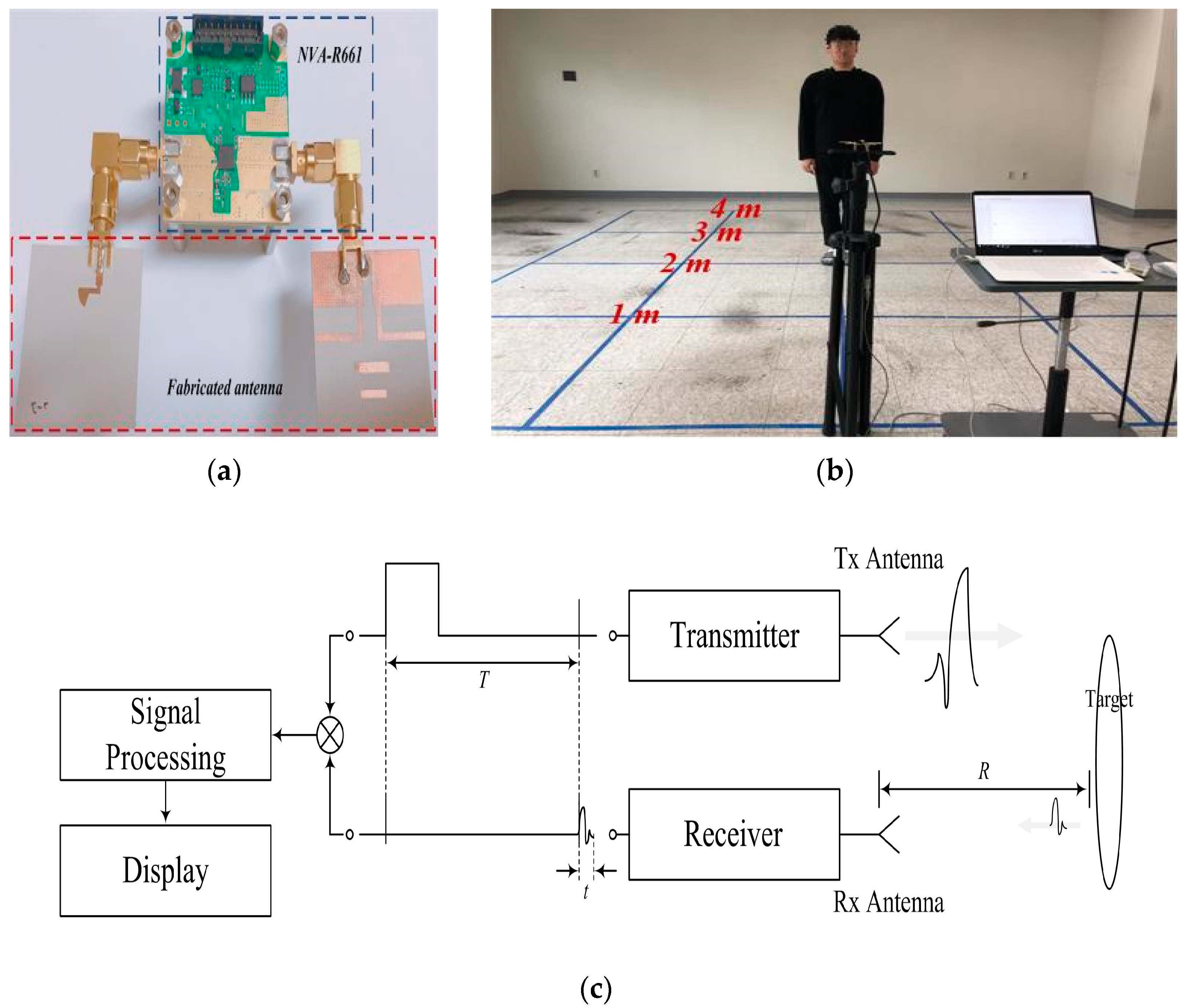
3. Measurement Platform for Indoor Location Tracking System
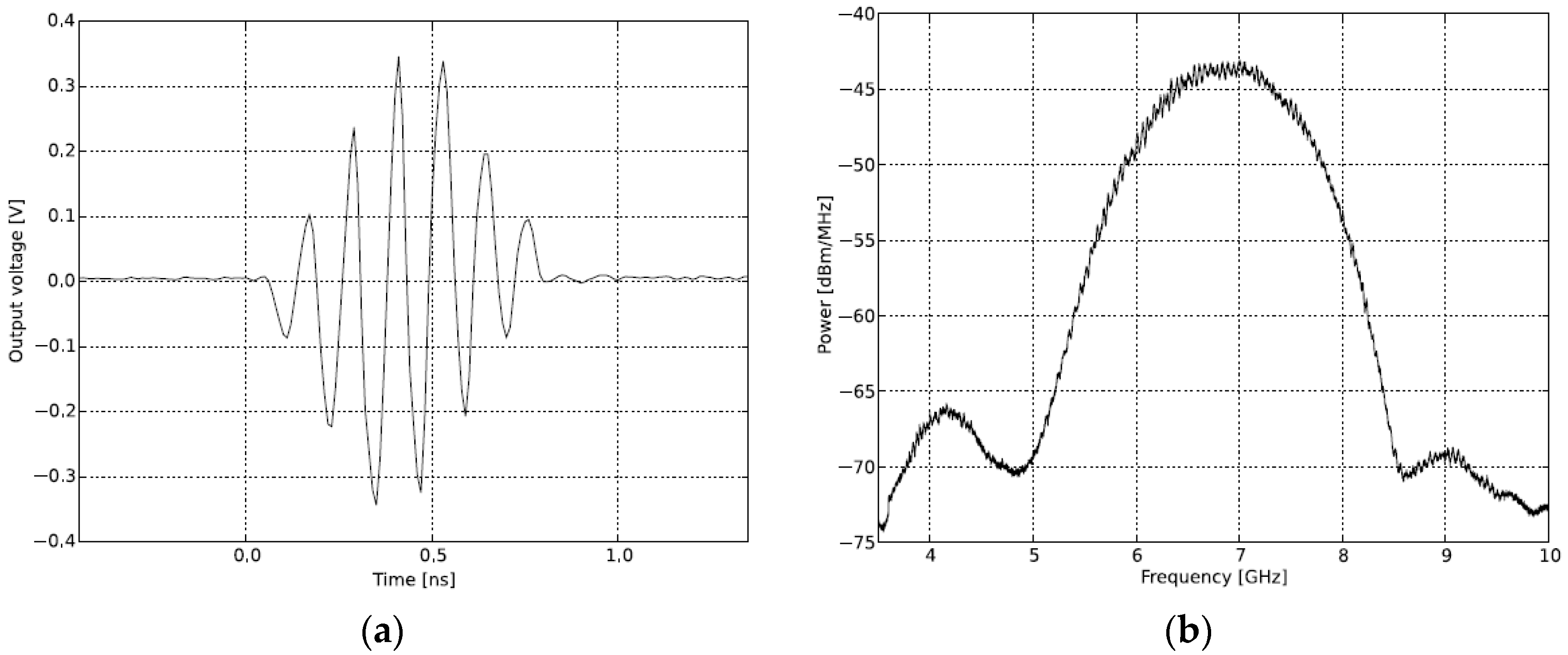
3.1. Radar Set-Up
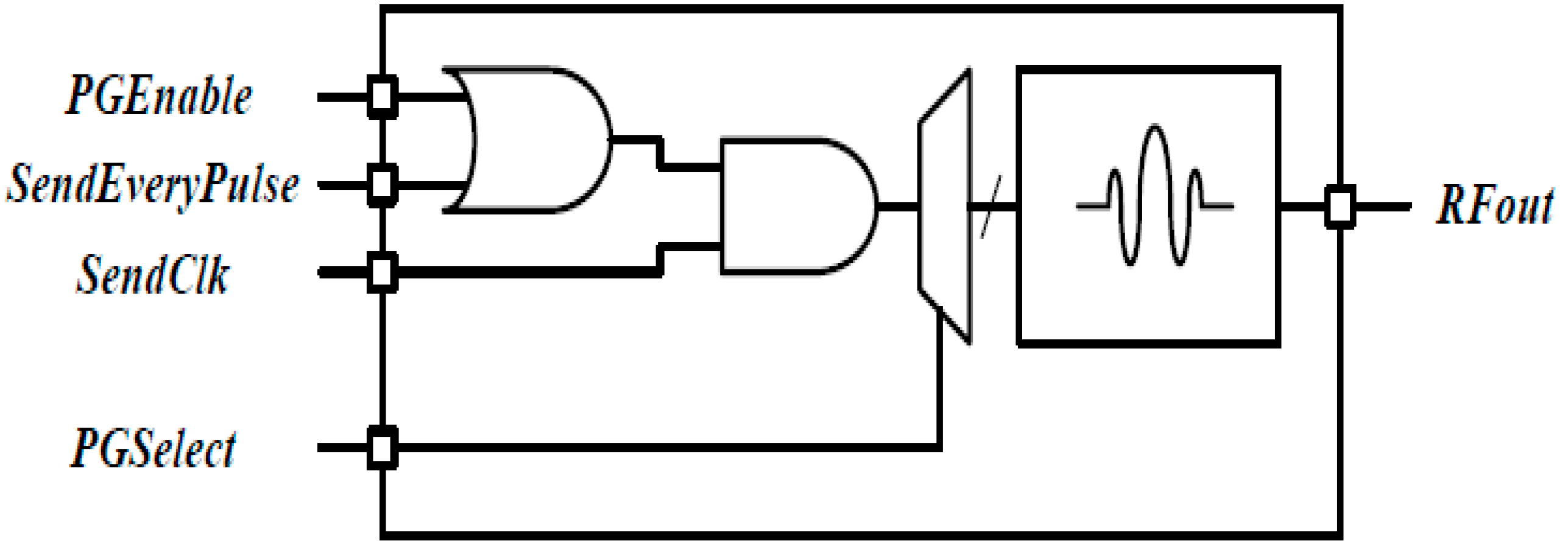
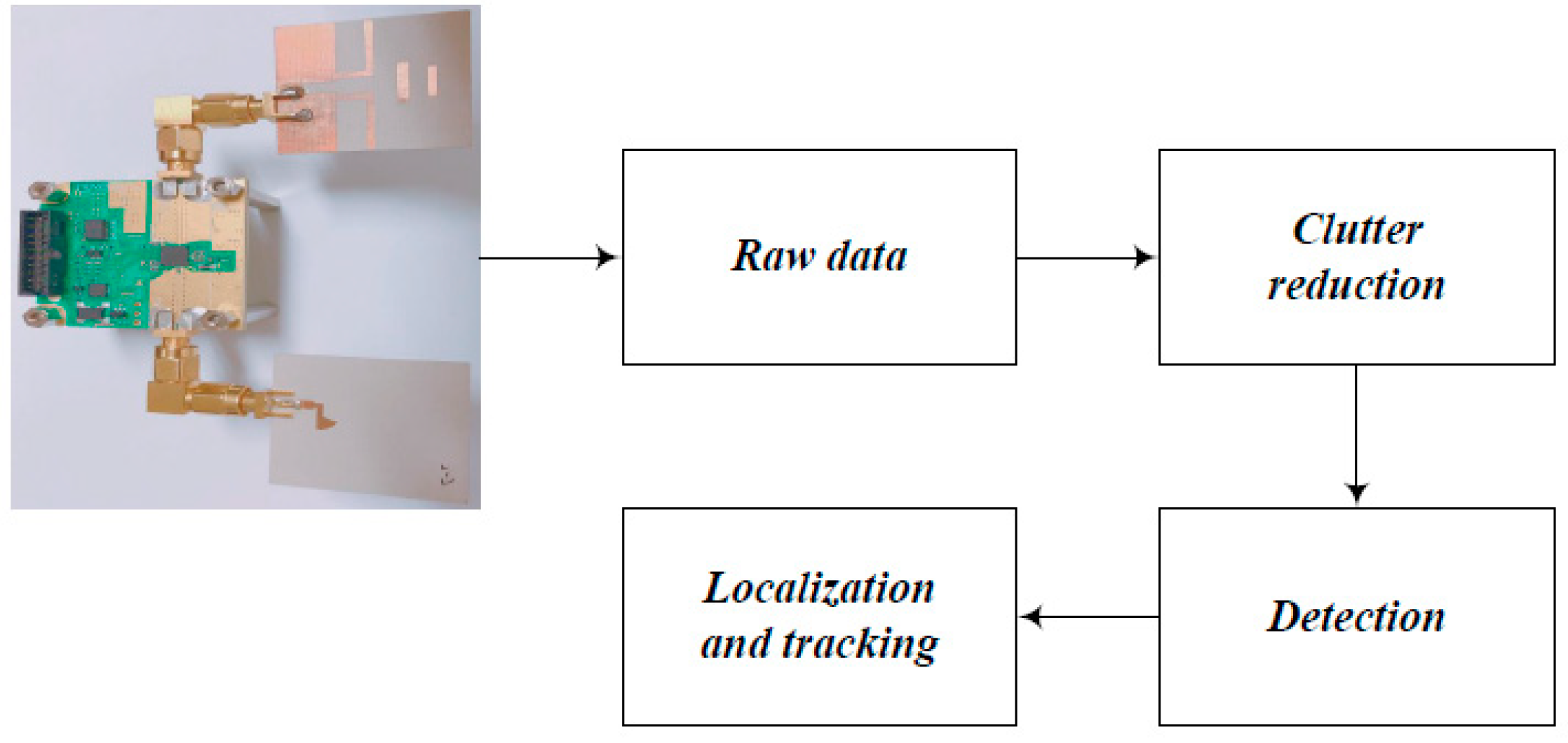
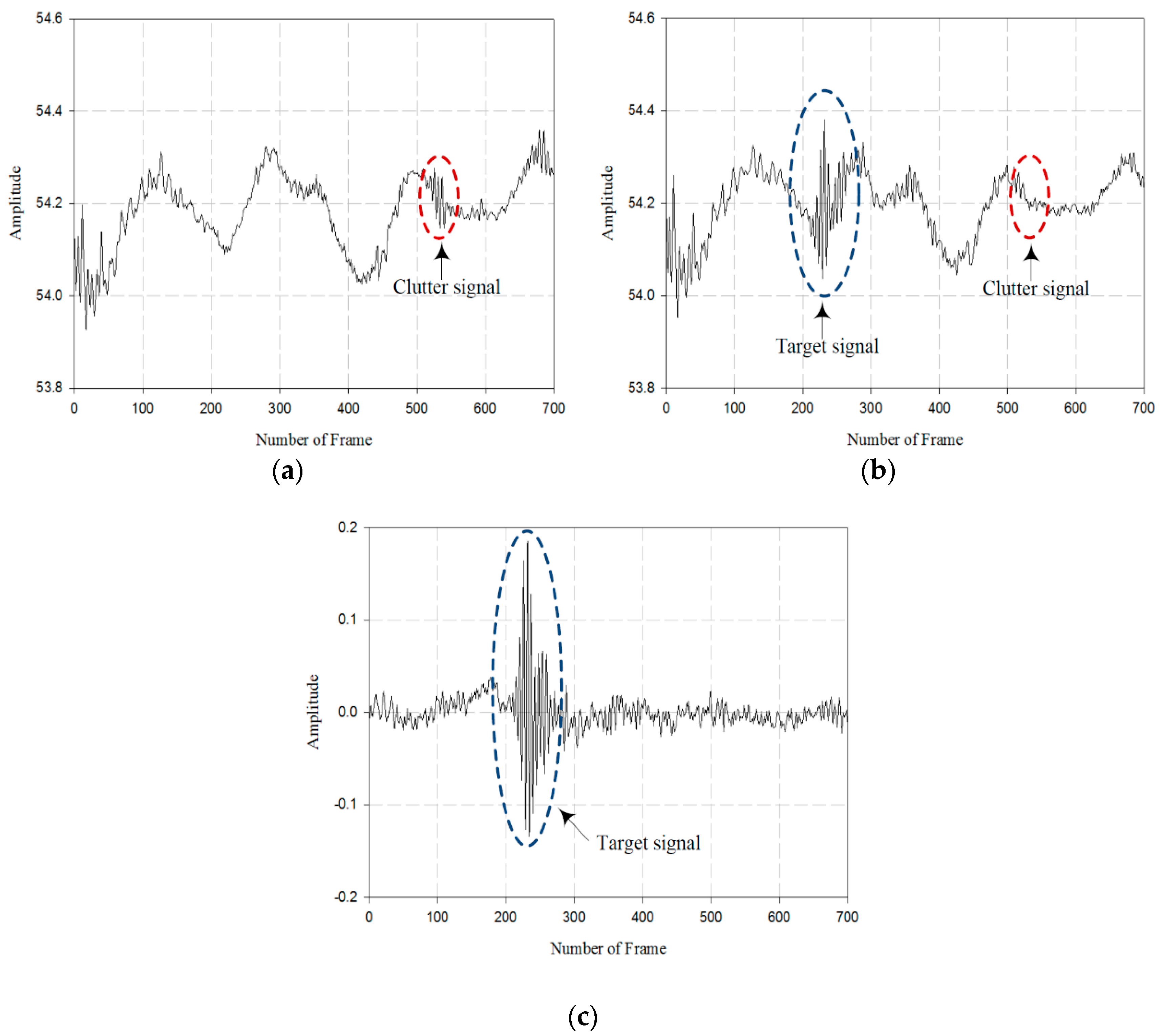
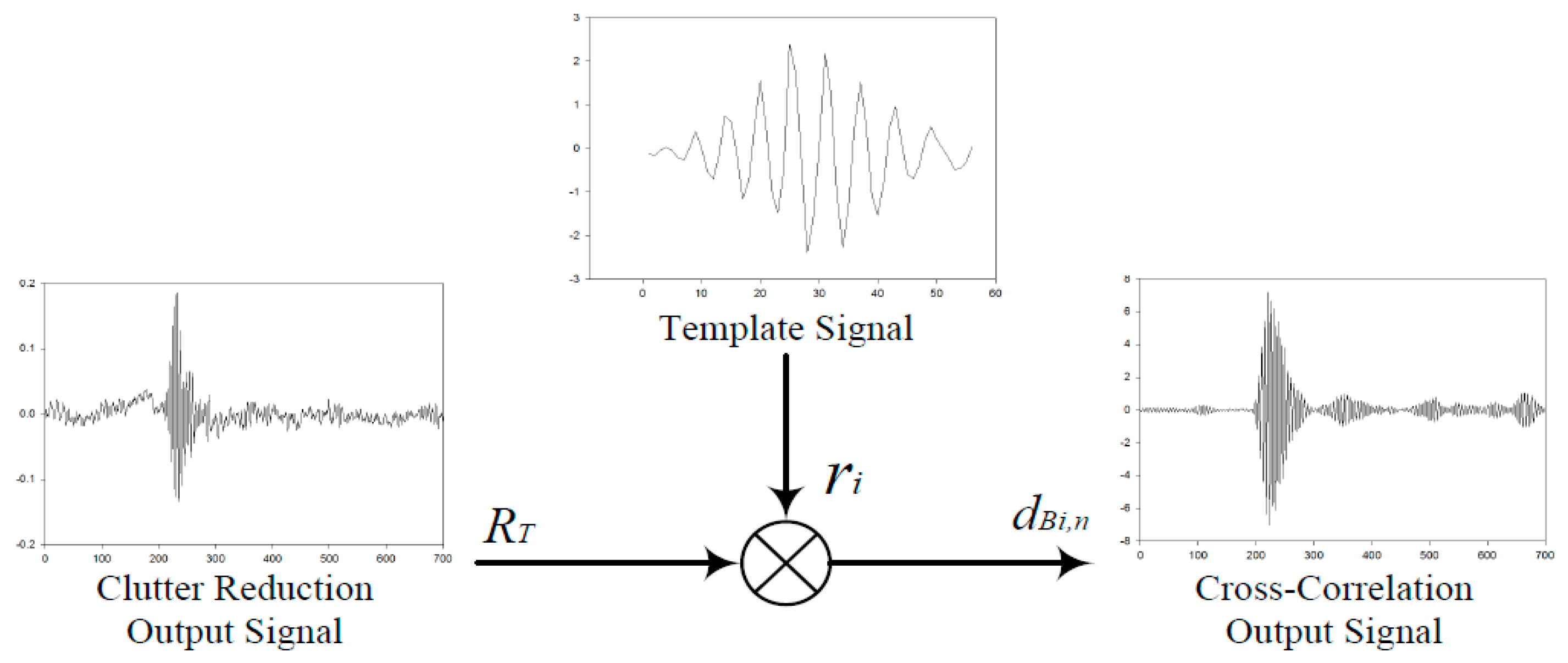
3.2. Signal Processing Set-Up
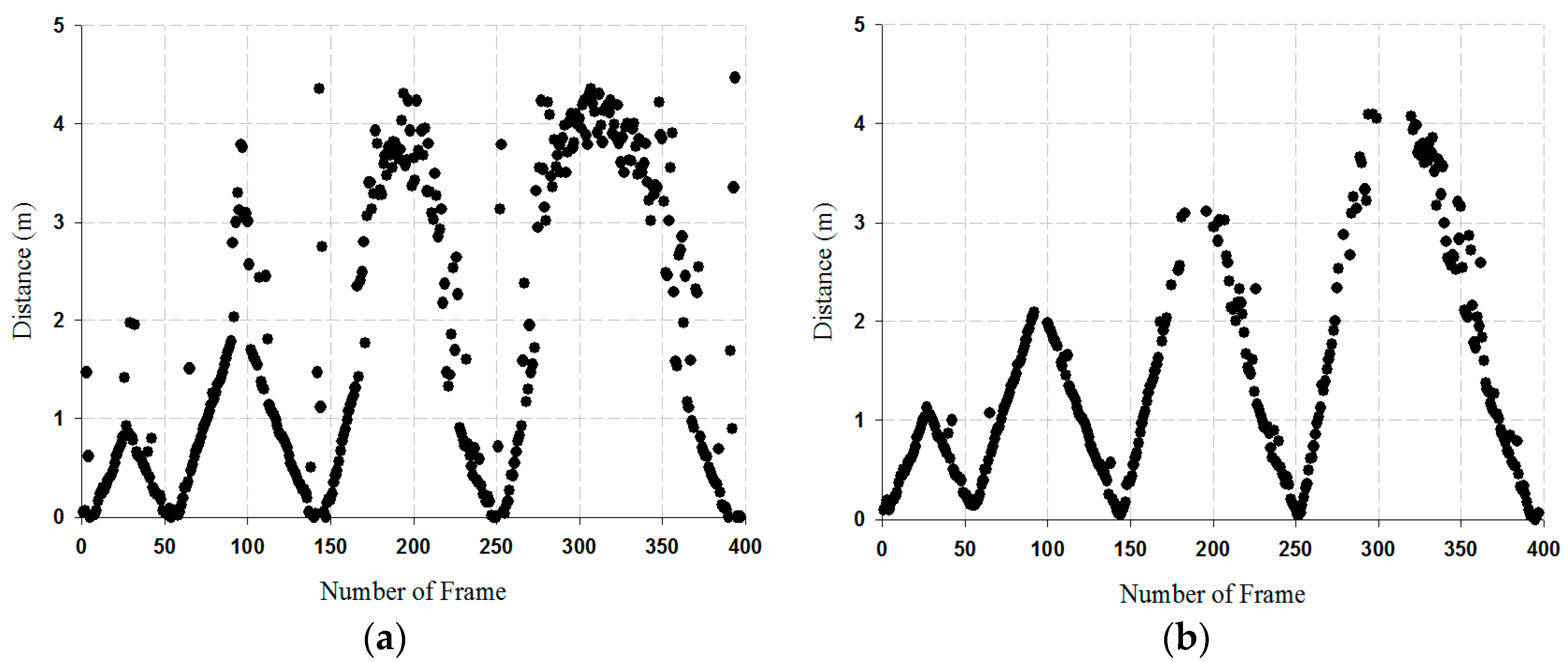
3.3. Target Tracking Measurement and Antenna Verification
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Yoon, D.Y. A Design of the Impulse Radar Digital Signal Processing for the Precise Location Positioning in IR-UWB. Master’s Thesis, Hanyang University, Seoul, Korea, February 2012. [Google Scholar]
- Immoreev, I.J. Ultra-wideband Systems. Features and Ways of Development; Ultra Wideband and Ultra Short Impulse Signals: Sevastopol, Ukraine, 2004; pp. 19–22. [Google Scholar]
- Kim, J.H. A Design of the Ranging Algorithm for Multi-Targets Using IR-UWB. Master’s Thesis, Hanyang University, Seoul, Korea, February 2013; pp. 1–2. [Google Scholar]
- XETHRU. UWB Module. Available online: https://www.xethru.com/ (accessed on 24 October 2018).
- Kim, K.Y.; Kang, E.K.; Kim, J.W.; Ra, K.W. A Study and Design of Beam Scanning Array Antenna using IR-UWB. J. Inst. Electron. Inf. Eng. 2014, 51, 660–667. [Google Scholar] [CrossRef]
- Zarrabi, F.B.; Mansouri, Z.; Gandji, N.P.; Kuhestani, H. Triple-Notch UWB Monopole Antenna with Fractal Koch and T-Shaped Stub. Int. J. Electron. Commun. 2016, 70, 64–69. [Google Scholar] [CrossRef]
- Bakariya, P.S.; Dwari, S.; Sarkar, M. Triple Band Botch UWB Printed Monopole Antenna with Enhanced Bandwidth. Int. J. Electron. Commun. 2015, 69, 26–30. [Google Scholar] [CrossRef]
- Rabbani, M.S.; Ghafouri-Shiraz, H. Accurate Remote Vital Sign Monitoring with 10 GHz Ultra-Wide Patch Antenna Array. Int. J. Electron. Commun. 2017, 77, 36–42. [Google Scholar] [CrossRef]
- Wu, J.; Zhao, Z.; Nie, Z.; Liu, Q.H. Bandwidth Enhancement of a Planar Printed Quasi-Yagi Antenna with Size Reduction. IEEE Trans. Antennas Propag. 2014, 62, 463–467. [Google Scholar] [CrossRef]
- Yang, D.; Qu, J.; Zhao, Z.; Liu, S.; Nie, Z. Planar Quasi-Yagi Antenna with Band Rejection Based on Dual Dipole Structure for UWB. IET Microw. Antennas Propag. 2016, 10, 1708–1714. [Google Scholar] [CrossRef]
- Sor, J.; Deal, W.R.; Qian, Y.; Itoh, T. A Broadband Quasi-Yagi Antenna Array. In Proceedings of the 1999 29th European Microwave Conference, Munich, Germany, 4–5 October 1999; pp. 255–258. [Google Scholar]
- Qian, Y.; Deal, W.R.; Kaneda, N.; Itoh, T. A uniplanar quasi-Yagi antenna with wide bandwidth and low mutual coupling characteristics. In Proceedings of the IEEE Antennas and Propagation Society International Symposium, Orlando, FL, USA, 11–16 July 1999; pp. 924–927. [Google Scholar]
- Kaneda, N.; Deal, W.R.; Qian, Y.; Waterhouse, R.; Itoh, T. A Broad-Band Planar Quasi-Yagi Antenna. IEEE Trans. Antennas Propag. 2002, 50, 1158–1160. [Google Scholar] [CrossRef]
- Sun, M.; Zhang, Y.P. 100-GHz quasi-Yagi antenna in silicon technology. IEEE Electron Device Lett. 2007, 28, 455–457. [Google Scholar] [CrossRef]
- Shao, J.; Fang, G.; Ji, Y.; Tan, K.; Yin, H. A Novel Compact Tapered-Slot Antenna for GPR Applications. IEEE Antennas Wirel. Propag. Lett. 2013, 12, 972–975. [Google Scholar] [CrossRef]
- Paulino, H.; Goes, J.; Garcao, A.S. Low Power UWB CMOS Radar Sensors, 1st ed.; Springer: Dordrecht, The Netherlands, 2008. [Google Scholar]
- X2 Impulse Radar Transceiver, XETHRU by NOVELDA; NOVELDA: Oslo, Norway, 2015.
- Baek, I.S.; Jung, M.K.; Cho, S.H. Improvement of Computational Speed for the SVD Background Clutter Signal Subtraction Algorithm in IR-UWB Radar Systems. J. KICS 2013, 38, 89–96. [Google Scholar] [CrossRef]
- Kim, B.H.; Han, S.J.; Kwon, G.R.; Pyun, J.Y. Signal Processing for Tracking of Moving Object in Multi-Impulse Radar Network System. Int. J. Distrib. Sens. Netw. 2015, 2015, 536841. [Google Scholar] [CrossRef]
- Verma, P.K.; Gaikwad, A.N.; Singh, D.; Nigam, M.J. Analysis of Clutter Reduction Techniques for Through Wall Imaging in UWB Range. Prog. Electromagn. Res. 2009, 17, 29–48. [Google Scholar] [CrossRef]
- Singh, S.; Liang, Q.; Chen, D.; Sheng, L. Sense through wall human detection using UWB radar. EURASIP J. Wirel. Commun. Netw. 2011, 2011, 20. [Google Scholar] [CrossRef]
- Hirata, S.; Kurosawa, M.K.; Katagiri, T. Cross-Correlation by Single-bit Signal Processing for Ultrasonic Distance Measurement. IEICE Trans. Fundam. Electron. Commun. Comput. Sci. 2008, E91-A, 1031–1037. [Google Scholar] [CrossRef]
- Vivaldi-LA Antenna Simula’on/Measrement Report; RFbeam Microwave GmbH: St. Gallen, Switzerland, 2016.
- Wu, J.; Zhao, Z.; Nie, Z.; Liu, Q.H. Design of a Wideband Planar Printed Quasi-Yagi Antenna Using Stepped Connection Structure. IEEE Trans. Antennas Propag. 2014, 62, 3431–3435. [Google Scholar] [CrossRef]
- Yeo, J.; Lee, J.I. Bandwidth Enhancement of Double-Dipole Quasi-Yagi Antenna Using Stepped Slotline Structure. IEEE Antennas Wirel. Propag. Lett. 2016, 15, 694–697. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Vivaldi-LA |
|---|---|
| Gain | 8 dBi |
| Polarization | Linear |
| Impedance | 50 Ω |
| Size | 50 × 50 × 2 mm3 |
| Connector | SMA |
| Distance (m) | RMSE | |
|---|---|---|
| Proposed Antenna | Commercial Antenna | |
| 1 | 0.0406 | 0.0716 |
| 2 | 0.0367 | 0.0295 |
| 3 | 0.1157 | 0.1287 |
| 4 | 0.0846 | 0.0469 |
| Antenna | Ref. [15] | Ref. [24] | Ref. [25] | This Work |
|---|---|---|---|---|
| Antenna type | Tapered slot | Quasi-Yagi | Quasi-Yagi | Quasi-Yagi |
| Size (mm) | 130 × 70 | 36 × 35 | 90 × 140 | 32.7 × 33 |
| Bandwidth (GHz) | 0.64–6 | 3.8–10.3 | 1.59–3.64 | 5.03–9.39 |
| Gain (dBi) | - | 7 dBi | 7.4 dBi | 6.46 dBi |
| Location tracking (m) | 1–9 | - | - | 1–4 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, S.-W.; Noh, S.-K.; Yu, H.-G.; Choi, D.-Y. Design and Analysis of a Quasi-Yagi Antenna for an Indoor Location Tracking System. Sensors 2018, 18, 4246. https://doi.org/10.3390/s18124246
Kim S-W, Noh S-K, Yu H-G, Choi D-Y. Design and Analysis of a Quasi-Yagi Antenna for an Indoor Location Tracking System. Sensors. 2018; 18(12):4246. https://doi.org/10.3390/s18124246
Chicago/Turabian StyleKim, Sun-Woong, Sun-Kuk Noh, Ho-Gyun Yu, and Dong-You Choi. 2018. "Design and Analysis of a Quasi-Yagi Antenna for an Indoor Location Tracking System" Sensors 18, no. 12: 4246. https://doi.org/10.3390/s18124246
APA StyleKim, S.-W., Noh, S.-K., Yu, H.-G., & Choi, D.-Y. (2018). Design and Analysis of a Quasi-Yagi Antenna for an Indoor Location Tracking System. Sensors, 18(12), 4246. https://doi.org/10.3390/s18124246