An Electro-Mechanical Actuator Motor Voltage Estimation Method with a Feature-Aided Kalman Filter †



Abstract
1. Introduction
2. Relevant Theories
2.1. Kalman Filter
2.2. Feature-Aided Kalman Filter
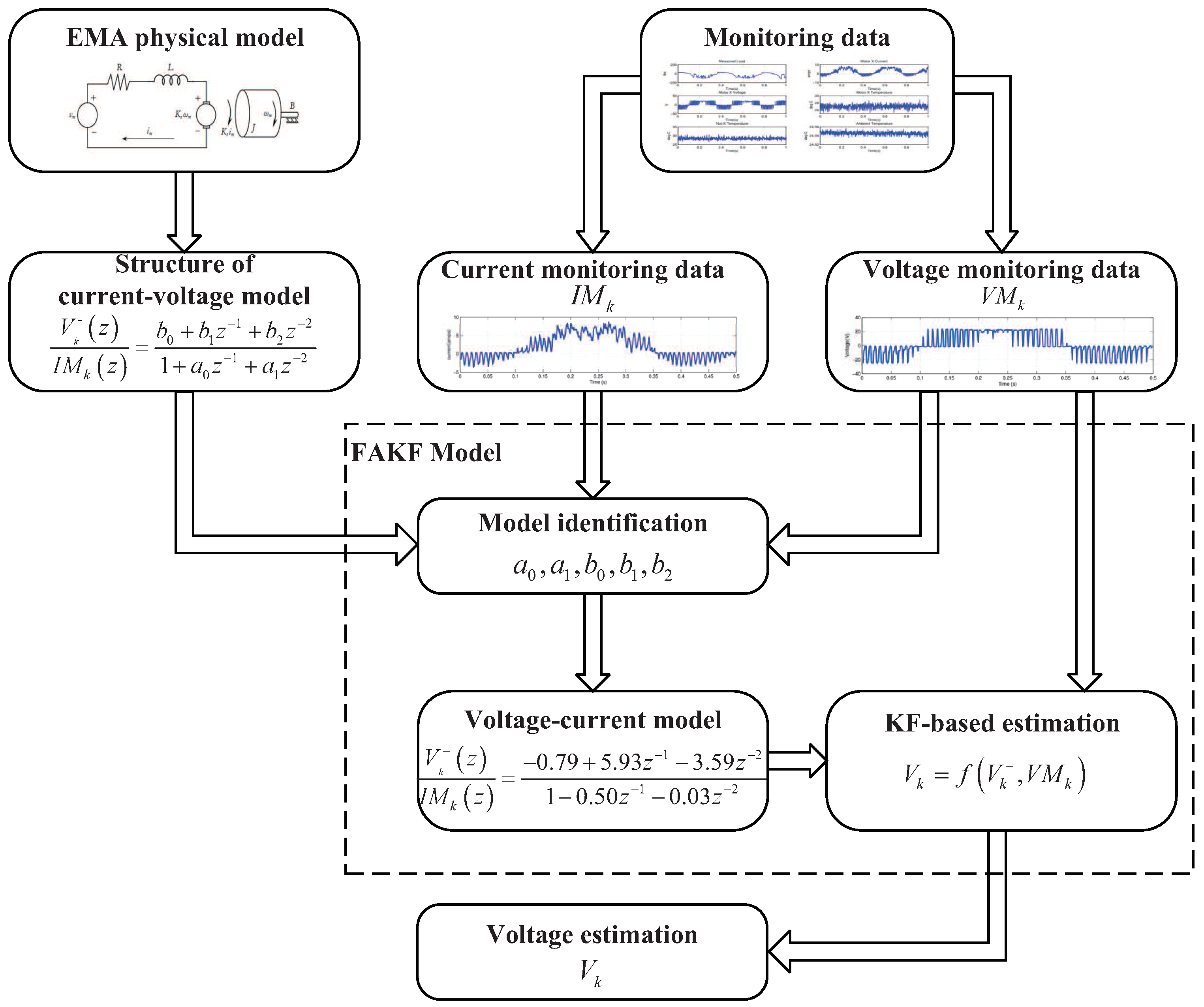
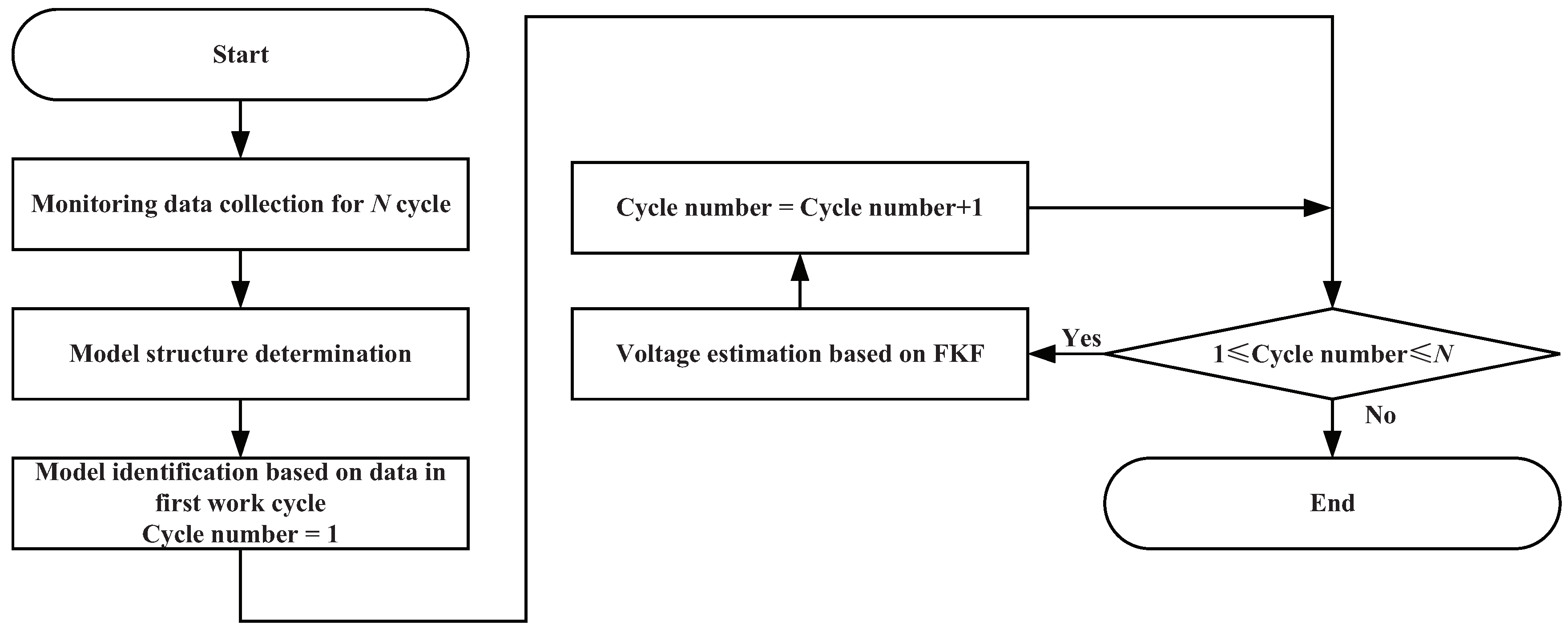
3. The Framework of FAKF-Based Voltage Estimation
4. Experiment Results and Analysis
4.1. FLEA Introduction
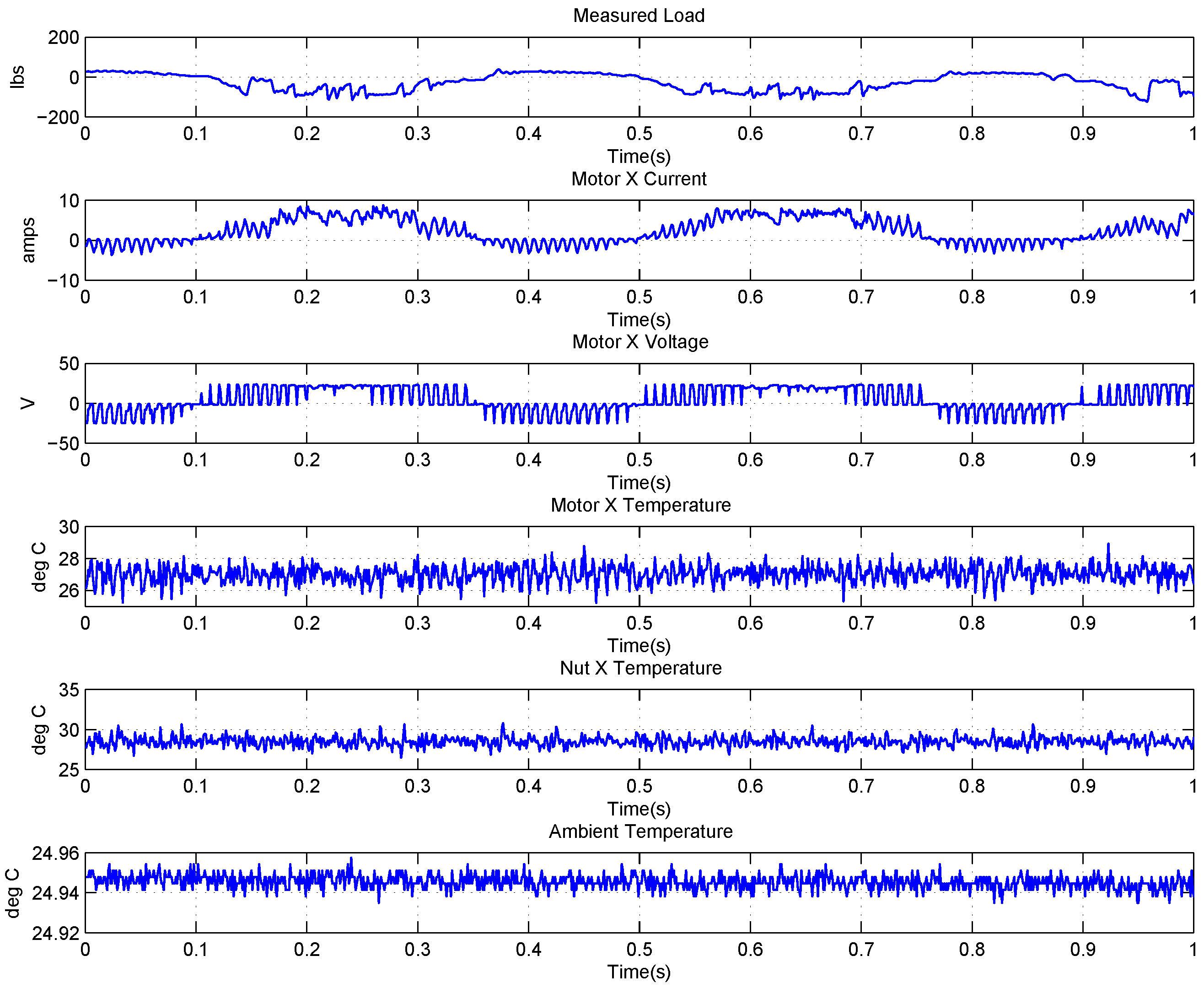
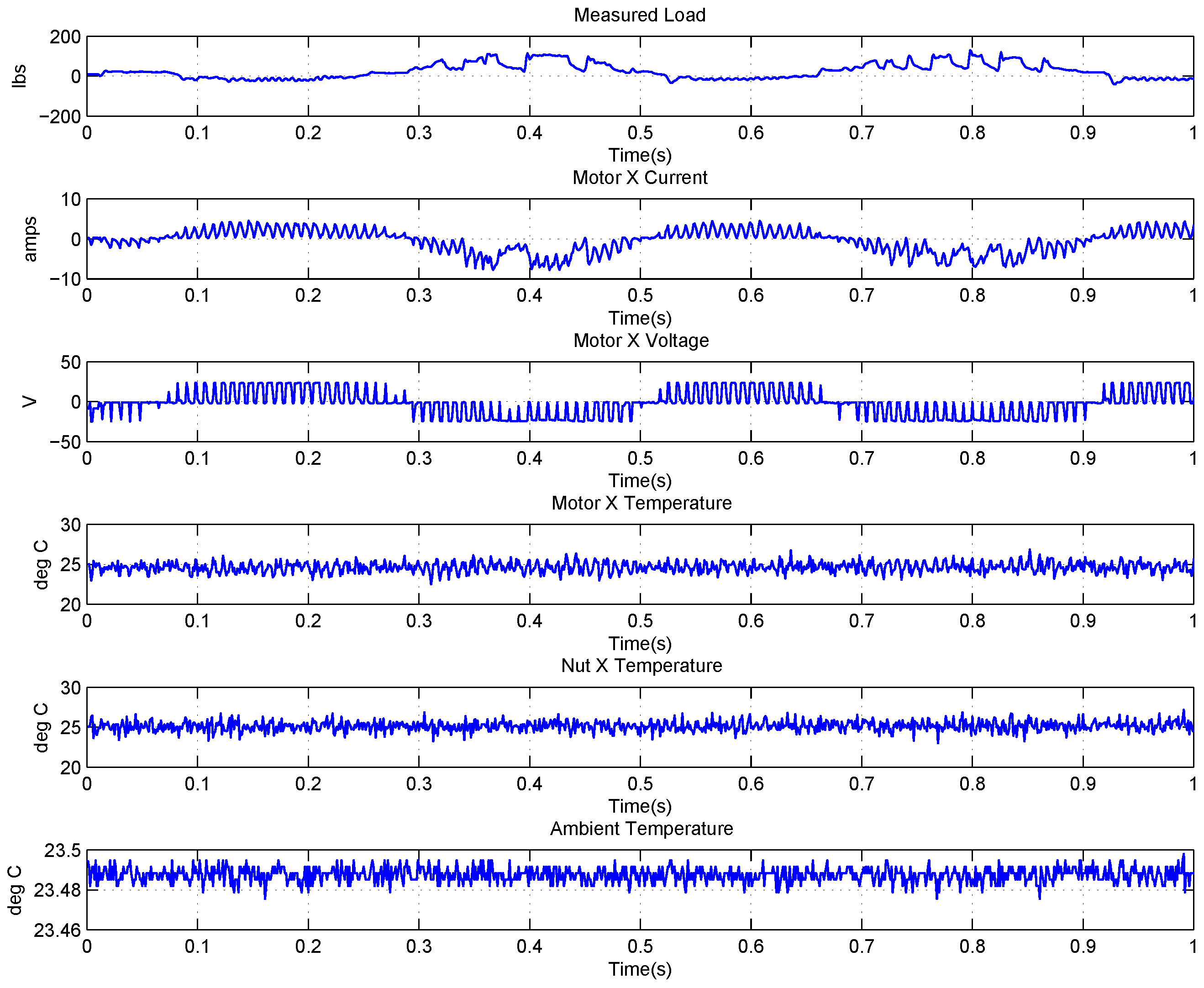
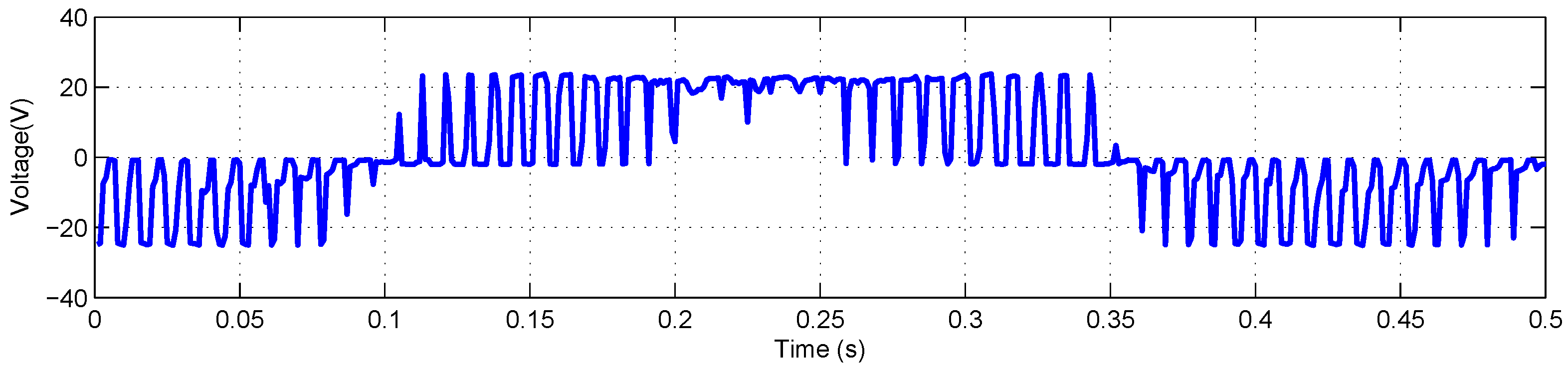
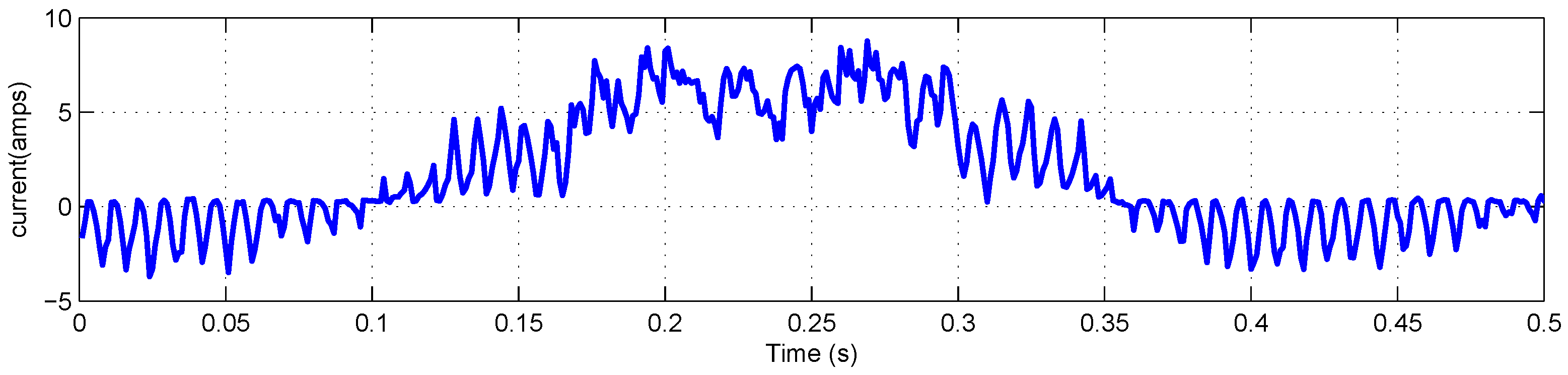
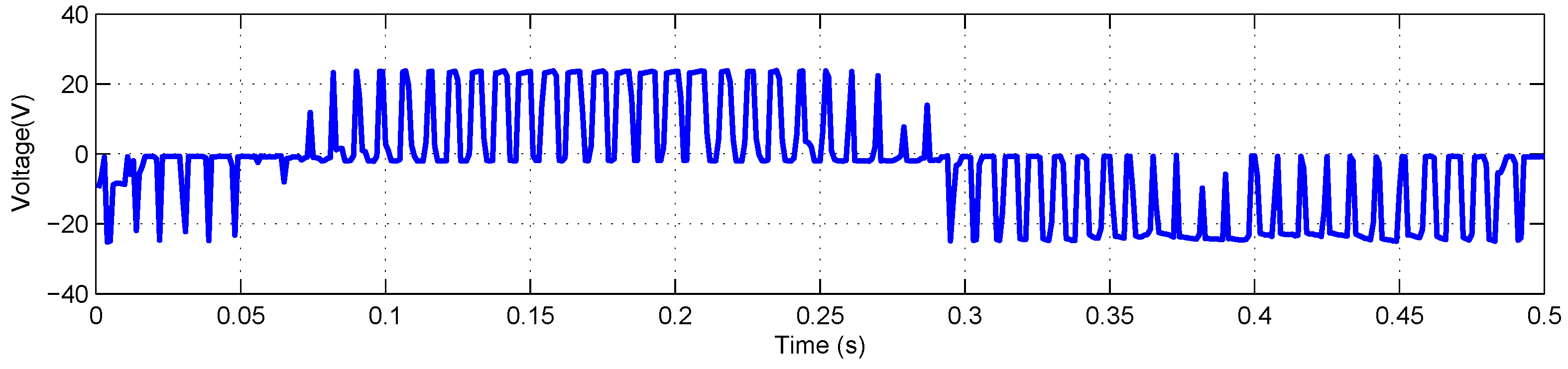
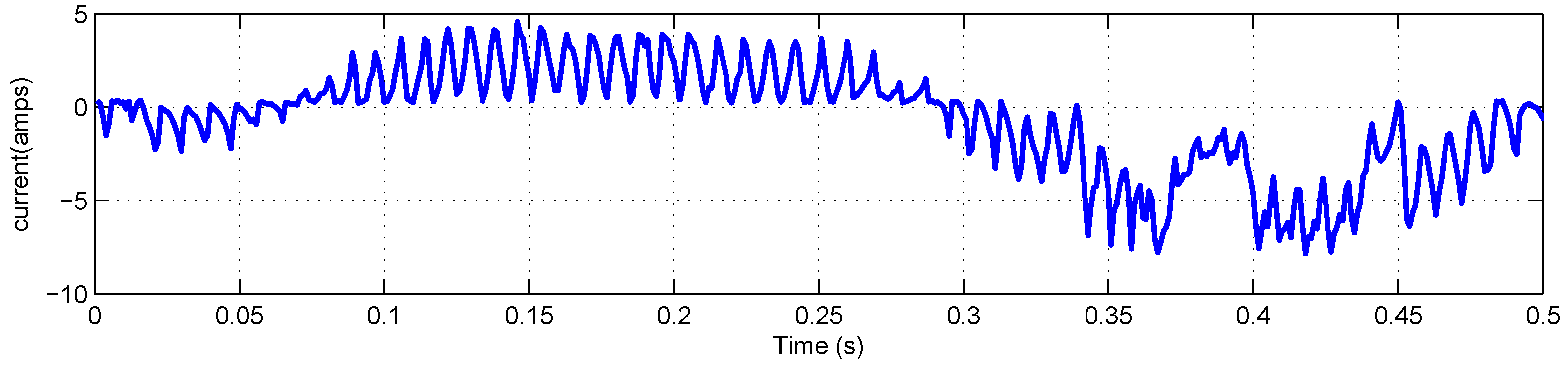
4.2. Data Description of EMA
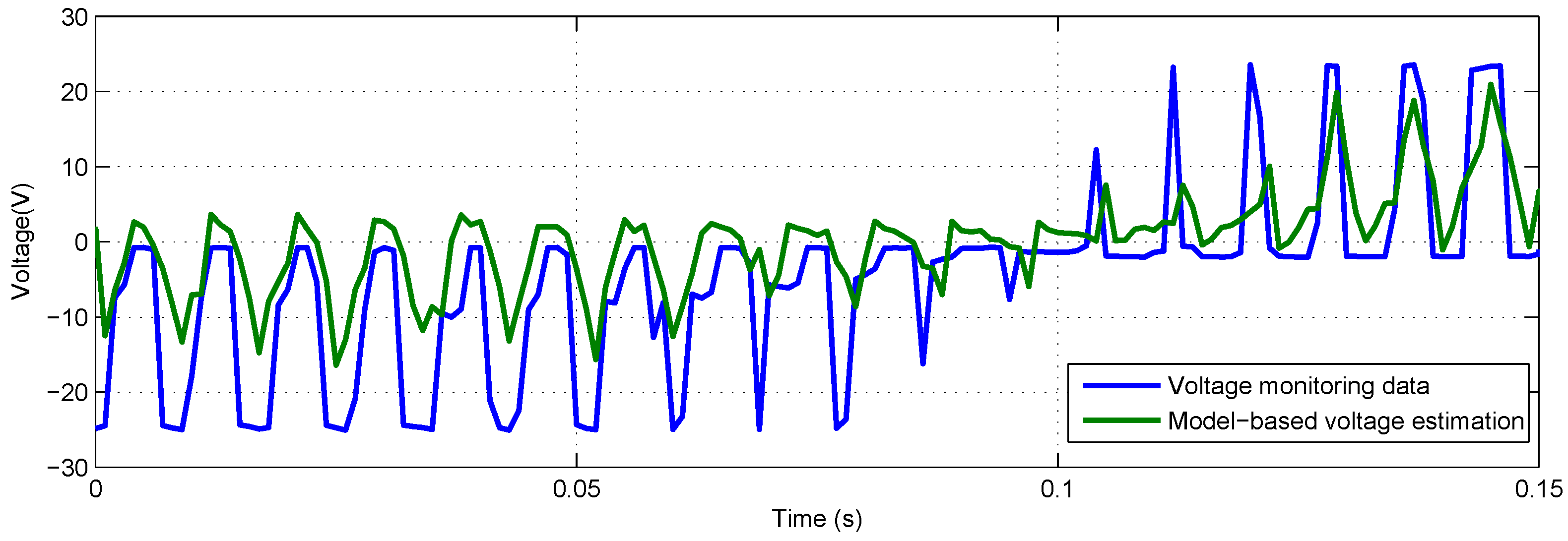
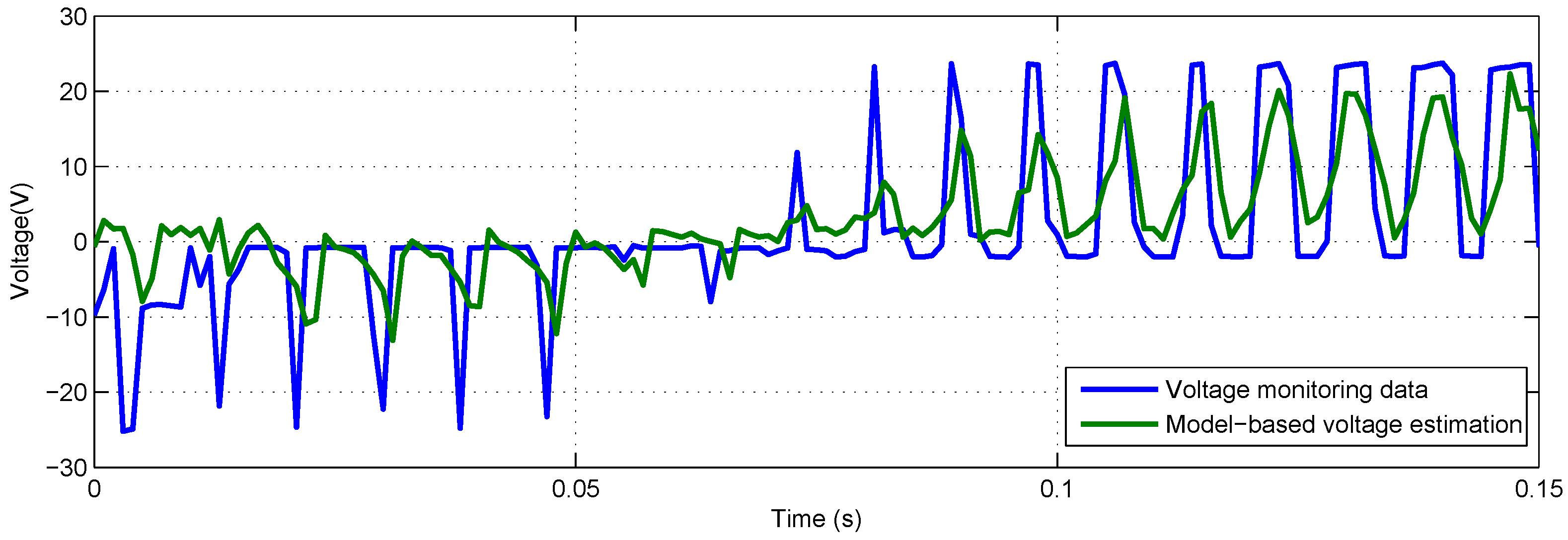
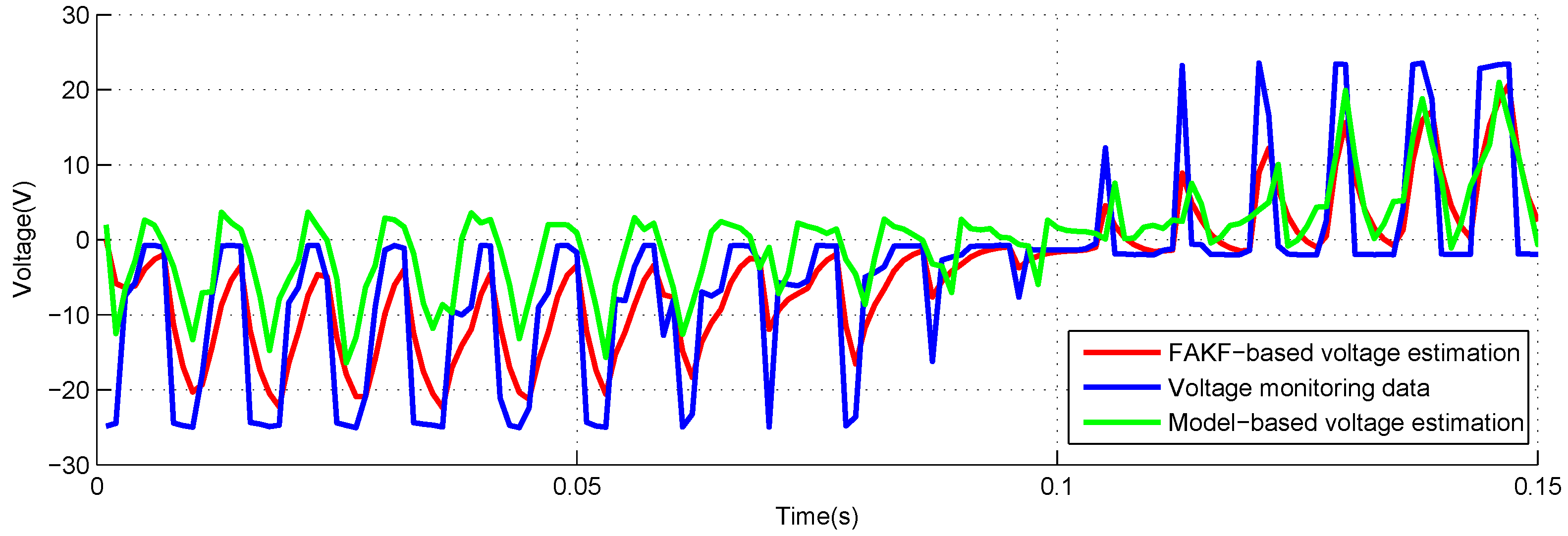
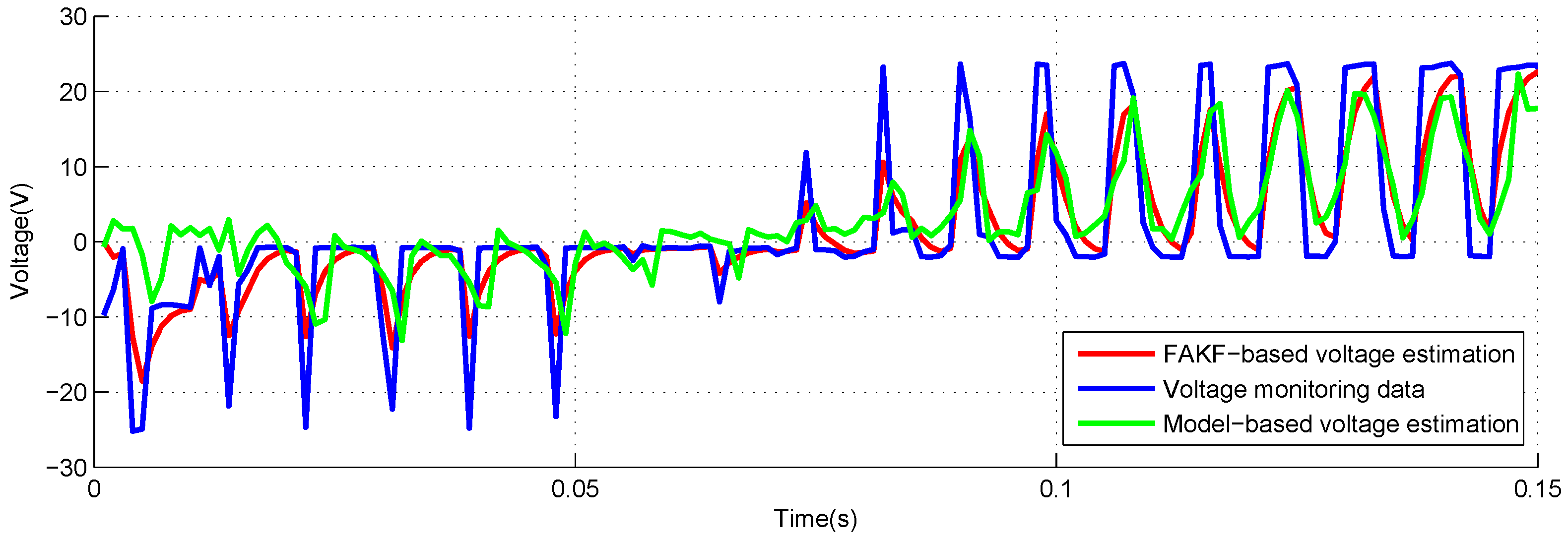
4.3. Voltage Estimation Based on FAKF
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Balaban, E.; Saxena, A.; Narasimhan, S.; Roychoudhury, I.; Koopmans, M.; Ott, C.; Goebel, K. Prognostic health-management system development for electromechanical actuators. J. Aerosp. Inf. Syst. 2015, 12, 329–344. [Google Scholar] [CrossRef]
- Balaban, E.; Saxena, A.; Narasimhan, S.; Roychoudhury, I.; Goebel, K. Experimental validation of a prognostic health management system for electro-mechanical actuators. In Proceedings of the Infotech@ Aerospace Conference, St. Louis, MO, USA, 29–31 March 2011; pp. 1–13. [Google Scholar]
- Rosero, J.; Ortega, J.; Aldabas, E.; Romeral, L. Moving towards a more electric aircraft. IEEE Aerosp. Electron. Syst. Mag. 2007, 22, 3–9. [Google Scholar] [CrossRef]
- Botten, S.L.; Whitley, C.R.; King, A.D. Flight control actuation technology for next-generation all-electric aircraft. Technol. Rev. J. 2000, 8, 55–68. [Google Scholar]
- Kunst, N.; Lynn, C. An innovative approach to electromechanical actuator emulation and damage propagation analysis. In Proceedings of the Annual Conference of the Prognostics and Health Management Society, San Diego, CA, USA, 27 September–1 October 2009; PHM Society: Rochester, NY, USA, 2009; pp. 1–8. [Google Scholar]
- Balaban, E.; Bansal, P.; Stoelting, P.; Saxena, A.; Goebel, K.F.; Curran, S. A diagnostic approach for electro-mechanical actuators in aerospace systems. In Proceedings of the Aerospace Conference, Big Sky, MT, USA, 7–14 March 2009; IEEE: Piscataway, NJ, USA, 2009; pp. 1–13. [Google Scholar]
- Narasimhan, S.; Roychoudhury, I.; Balaban, E.; Saxena, A. Combining model-based and feature-driven diagnosis approaches-a case study on electromechanical actuators. In Proceedings of the 21st International Workshop on Principles of Diagnosis, Portland, OR, USA, 13–16 October 2010; pp. 1–8. [Google Scholar]
- Ismail, M.A.; Balaban, E.; Spangenberg, H. Fault detection and classification for flight control electromechanical actuators. In Proceedings of the Aerospace Conference, Big Sky, MT, USA, 5–12 March 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 1–10. [Google Scholar]
- Jensen, S.C.; Jenney, G.D.; Dawson, D. Flight test experience with an electromechanical actuator on the F-18 systems research aircraft. In Proceedings of the IEEE Digital Avionics Systems Conference, Philadelphia, PA, USA, 7–13 October 2000; IEEE: Piscataway, NJ, USA, 2000; Volume 1, pp. 1–10. [Google Scholar]
- Smith, M.J.; Byington, C.S.; Watson, M.J.; Bharadwaj, S.; Swerdon, G.; Goebel, K.; Balaban, E. Experimental and analytical development of health management for electro-mechanical actuators. In Proceedings of the Aerospace conference, Big Sky, MT, USA, 7–14 March 2009; IEEE: Piscataway, NJ, USA, 2009; pp. 1–14. [Google Scholar]
- Romeral, L.; Rosero, J.; Espinosa, A.G.; Cusido, J.; Ortega, J. Electrical monitoring for fault detection in an EMA. IEEE Aerosp. Electron. Syst. Mag. 2010, 25, 4–9. [Google Scholar] [CrossRef]
- Garcia, A.; Cusido, I.; Rosero, J.; Ortega, J.; Romeral, L. Reliable electro-mechanical actuators in aircraft. IEEE Aerosp. Electron. Syst. Mag. 2008, 23, 19–25. [Google Scholar] [CrossRef]
- Liu, J.; Wang, W.; Golnaraghi, F. A multi-step predictor with a variable input pattern for system state forecasting. Mech. Syst. Signal Process. 2009, 23, 1586–1599. [Google Scholar] [CrossRef]
- Peng, Y.; Zhang, Y.; Liu, D.; Liu, L. Degradation estimation using feature increment stepwise linear regression for PWM Inverter of Electro-Mechanical Actuator. Microelectron. Reliab. 2018, 88, 514–518. [Google Scholar] [CrossRef]
- Liu, D.; Song, Y.; Li, L.; Liao, H.; Peng, Y. On-line life cycle health assessment for lithium-ion battery in electric vehicles. J. Clean. Prod. 2018, 199, 1050–1065. [Google Scholar] [CrossRef]
- Castellini, L.; D’Andrea, M.; Borgarelli, N. Analysis and design of a linear electro-mechanical actuator for a high lift system. In Proceedings of the 2014 International Symposium on Power Electronics, Electrical Drives, Automation and Motion (SPEEDAM), Ischia, Italy, 18–20 June 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 243–247. [Google Scholar]
- Gokdere, L.; Chiu, S.L.; Keller, K.J.; Vian, J. Lifetime control of electromechanical actuators. In Proceedings of the Aerospace Conference, Big Sky, MT, USA, 5–12 March 2005; IEEE: Piscataway, NJ, USA, 2005; pp. 3523–3531. [Google Scholar]
- Zhang, Y.; Wang, L.; Wang, S.; Wang, P.; Liao, H.; Peng, Y. Auxiliary power unit failure prediction using quantified generalized renewal process. Microelectron. Reliab. 2018, 84, 215–225. [Google Scholar] [CrossRef]
- Chirico, A.J.; Kolodziej, J.R. A data-driven methodology for fault detection in electromechanical actuators. J. Dyn. Syst. Meas. Control 2014, 136, 1–16. [Google Scholar] [CrossRef]
- Pang, J.; Liu, D.; Peng, Y.; Peng, X. Optimize the Coverage Probability of Prediction Interval for Anomaly Detection of Sensor-Based Monitoring Series. Sensors 2018, 18, 967. [Google Scholar] [CrossRef]
- Liu, D.; Yin, X.; Song, Y.; Liu, W.; Peng, Y. An On-Line State of Health Estimation of Lithium-Ion Battery Using Unscented Particle Filter. IEEE Access 2018, 6, 40990–41001. [Google Scholar] [CrossRef]
- Byington, C.S.; Watson, M.; Edwards, D.; Stoelting, P. A model-based approach to prognostics and health management for flight control actuators. In Proceedings of the 2004 IEEE Aerospace Conference Proceedings (IEEE Cat. No. 04TH8720), Big Sky, MT, USA, 6–13 March 2004. [Google Scholar]
- Berthelot, E. Speed and Rotor Flux Estimation of Induction Machines Using a Two-Stage Extended Kalman Filter; Pergamon Press Inc.: Oxford, UK, 2009; pp. 1819–1827. [Google Scholar]
- Mercorelli, P. A Motion Sensorless Control for Intake Valves in Combustion Engines. IEEE Trans. Ind. Electron. 2017, 64, 3402–3412. [Google Scholar] [CrossRef]
- Vieira, R.P.; Gastaldini, C.C.; Azzolin, R.Z.; Grundling, H.A. Sensorless Sliding-Mode Rotor Speed Observer of Induction Machines Based on Magnetizing Current Estimation. IEEE Trans. Ind. Electron. 2014, 61, 4573–4582. [Google Scholar] [CrossRef]
- Peng, Y.; Hou, Y.; Song, Y.; Pang, J.; Liu, D. Lithium-Ion Battery Prognostics with Hybrid Gaussian Process Function Regression. Energies 2018, 11, 1420. [Google Scholar] [CrossRef]
- Bodden, D.S.; Clements, N.S.; Schley, B.; Jenney, G. Seeded failure testing and analysis of an electro-mechanical actuator. In Proceedings of the IEEE Aerospace Conference, Big Sky, MT, USA, 3–10 March 2007; pp. 1–8. [Google Scholar]
- Baybutt, M.; Nanduri, S.; Kalgren, P.W.; Bodden, D.S.; Clements, N.S.; Alipour, S. Seeded fault testing and in-situ analysis of critical electronic components in ema power circuitry. In Proceedings of the Aerospace Conference, Big Sky, MT, USA, 1–8 March 2008; IEEE: Piscataway, NJ, USA, 2008; pp. 1–12. [Google Scholar]
- Byington, C.S.; Watson, M.; Edwards, D. Data-driven neural network methodology to remaining life predictions for aircraft actuator components. In Proceedings of the Aerospace Conference, Big Sky, MT, USA, 6–13 March 2004; IEEE: Piscataway, NJ, USA, 2004; Volume 6, pp. 3581–3589. [Google Scholar]
- Brown, D.; Georgoulas, G.; Bae, H.; Vachtsevanos, G.; Chen, R.; Ho, Y.; Tannenbaum, G.; Schroeder, J. Particle filter based anomaly detection for aircraft actuator systems. In Applications of Intelligent Control to Engineering Systems; Springer: Berlin, Germany, 2009; pp. 65–88. [Google Scholar]
- Zhang, Y.; Liu, D.; Yu, J.; Peng, Y.; Peng, X. EMA remaining useful life prediction with weighted bagging GPR algorithm. Microelectron. Reliab. 2017, 75, 253–263. [Google Scholar] [CrossRef]
- Qiao, G.; Liu, G.; Shi, Z.; Wang, Y.; Ma, S.; Lim, T.C. A review of electromechanical actuators for More/All Electric aircraft systems. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2018, 232, 4128–4151. [Google Scholar] [CrossRef]
- Balaban, E.; Saxena, A.; Narasimhan, S.; Roychoudhury, I.; Goebel, K.F.; Koopmans, M.T. Airborne electro-mechanical actuator test stand for development of prognostic health management systems. In Proceedings of the Annual Conference of the Prognostics and Health Management Society, PHM 2010, Portland, OR, USA, 29 September–2 October 2014. [Google Scholar]
- Nakazawa, Y.; Ohyama, K.; Fujii, H.; Uehara, H.; Hyakutake, Y. Phase voltage estimation for position sensorless control of switched reluctance motor. In Proceedings of the 2016 19th International Conference on Electrical Machines and Systems (ICEMS), Chiba, Japan, 13–16 November 2016. [Google Scholar]
- Srivastava, L.; Singh, S.; Sharma, J. Comparison of feature selection techniques for ANN-based voltage estimation. Electr. Power Syst. Res. 2000, 53, 187–195. [Google Scholar] [CrossRef]
- Noguchi, T.; Tomiki, H.; Kondo, S.; Takahashi, I. Direct power control of PWM converter without power-source voltage sensors. IEEE Trans. Ind. Appl. 1998, 34, 473–479. [Google Scholar] [CrossRef]
- Al-Hasawi, W.M.; El-Naggar, K.M. New digital filter for unbalance distorted current and voltage estimation in power systems. Electr. Power Syst. Res. 2008, 78, 1290–1301. [Google Scholar] [CrossRef][Green Version]
- Yu, X.; Dunnigan, M.W.; Williams, B.W. Phase voltage estimation of a PWM VSI and its application to vector-controlled induction machine parameter estimation. IEEE Trans. Ind. Electron. 2000, 47, 1181–1184. [Google Scholar] [CrossRef]
- Song, H.S.; Joo, I.W.; Nam, K. Source voltage sensorless estimation scheme for PWM rectifiers under unbalanced conditions. IEEE Trans. Ind. Electron. 2003, 50, 1238–1245. [Google Scholar] [CrossRef]
- Aguilera, R.P.; Quevedo, D.E. Capacitor voltage estimation for predictive control algorithm of flying capacitor converters. In Proceedings of the IEEE International Conference on Industrial Technology, Gippsland, VIC, Australia, 10–13 February 2009; IEEE: Piscataway, NJ, USA, 2009; pp. 1–6. [Google Scholar]
- Morris, C.T.; Han, D.; Sarlioglu, B. Reduction of common mode voltage and conducted EMI through three-phase inverter topology. IEEE Trans. Power Electron. 2017, 32, 1720–1724. [Google Scholar] [CrossRef]
- Han, D.; Morris, C.T.; Sarlioglu, B. Common-mode voltage cancellation in PWM motor drives with balanced inverter topology. IEEE Trans. Ind. Electron. 2017, 64, 2683–2688. [Google Scholar] [CrossRef]
- Zhang, Y.; Peng, Y.; Liu, D. A Feature-aided Kalman Filter Model for Electro-Mechanical Actuator Voltage Estimation. In Proceedings of the 2018 International Conference on Sensing, Diagnostics, Prognostics, and Control (SDPC), Xi’an, China, 15–17 August 2018. [Google Scholar]
- Mbalawata, I.S.; Särkkä, S.; Vihola, M.; Haario, H. Adaptive Metropolis algorithm using variational Bayesian adaptive Kalman filter. Comput. Stat. Data Anal. 2015, 83, 101–115. [Google Scholar] [CrossRef]
- Kalman, R.E. A new approach to linear filtering and prediction problems. J. Basic Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef]
- Bishop, G.; Welch, G. An introduction to the Kalman filter. In Proceedings of the SIGGRAPH, Los Angeles, CA, USA, 12–17 August 2001; Volume 8, pp. 19–29. [Google Scholar]
- Jazwinski, A.H. Stochastic Processes and Filtering Theory; Courier Corporation: Chelmsford, MA, USA, 2007. [Google Scholar]
- Sridhar, R.; Kolodziej, J.R.; Hall, L. Bearing Fault Detection in Electromechanical Actuators from Empirically Extracted Features. In Proceedings of the AIAA Atmospheric Flight Mechanics, Boston, MA, USA, 19–22 August 2013; pp. 1–17. [Google Scholar]
- Mercorelli, P. Parameters identification in a permanent magnet three-phase synchronous motor of a city-bus for an intelligent drive assistant. Int. J. Model. Identif. Control 2014, 21, 352–361. [Google Scholar] [CrossRef]
- Mercorelli, P. A Decoupling Dynamic Estimator for Online Parameters Indentification of Permanent Magnet Three-Phase Synchronous Motors. IFAC Proc. Vol. 2012, 45, 757–762. [Google Scholar] [CrossRef]
- Chen, L.; Mercorelli, P.; Liu, S. A Kalman estimator for detecting repetitive disturbances. In Proceedings of the American Control Conference, Portland, OR, USA, 8–10 June 2005. [Google Scholar]
- Wang, B.; Chen, Y.; Liu, D.; Peng, X. An embedded intelligent system for on-line anomaly detection of unmanned aerial vehicle. J. Intell. Fuzzy Syst. 2018, 34, 3535–3545. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Identified Results with −40 lbs Load | Identified Results with +40 lbs Load |
|---|---|---|
| −0.4998 | −0.4424 | |
| −0.0343 | −0.0512 | |
| −0.7889 | −1.2471 | |
| 5.9267 | 6.7634 | |
| −3.5857 | −3.2269 |
| FAKF-Based Estimation | Model-Based Estimation | |
|---|---|---|
| MAE | 3.4361 | 6.2292 |
| RMSE | 5.1754 | 8.0186 |
| FAKF-Based Estimation | Model-Based Estimation | |
|---|---|---|
| MAE | 3.7047 | 6.5225 |
| RMSE | 5.1613 | 8.4893 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Liu, L.; Peng, Y.; Liu, D. An Electro-Mechanical Actuator Motor Voltage Estimation Method with a Feature-Aided Kalman Filter. Sensors 2018, 18, 4190. https://doi.org/10.3390/s18124190
Zhang Y, Liu L, Peng Y, Liu D. An Electro-Mechanical Actuator Motor Voltage Estimation Method with a Feature-Aided Kalman Filter. Sensors. 2018; 18(12):4190. https://doi.org/10.3390/s18124190
Chicago/Turabian StyleZhang, Yujie, Liansheng Liu, Yu Peng, and Datong Liu. 2018. "An Electro-Mechanical Actuator Motor Voltage Estimation Method with a Feature-Aided Kalman Filter" Sensors 18, no. 12: 4190. https://doi.org/10.3390/s18124190
APA StyleZhang, Y., Liu, L., Peng, Y., & Liu, D. (2018). An Electro-Mechanical Actuator Motor Voltage Estimation Method with a Feature-Aided Kalman Filter. Sensors, 18(12), 4190. https://doi.org/10.3390/s18124190