Insect Detection and Classification Based on an Improved Convolutional Neural Network



Abstract
1. Introduction
- 1)
- Quickly locate the information of an insect positioned in a complex background;
- 2)
- Accurately distinguish insect species with high similarity between intra-class and inter-class;
- 3)
- Effectively identify the different phenotypes of the same insect species in different growth periods.
- 1)
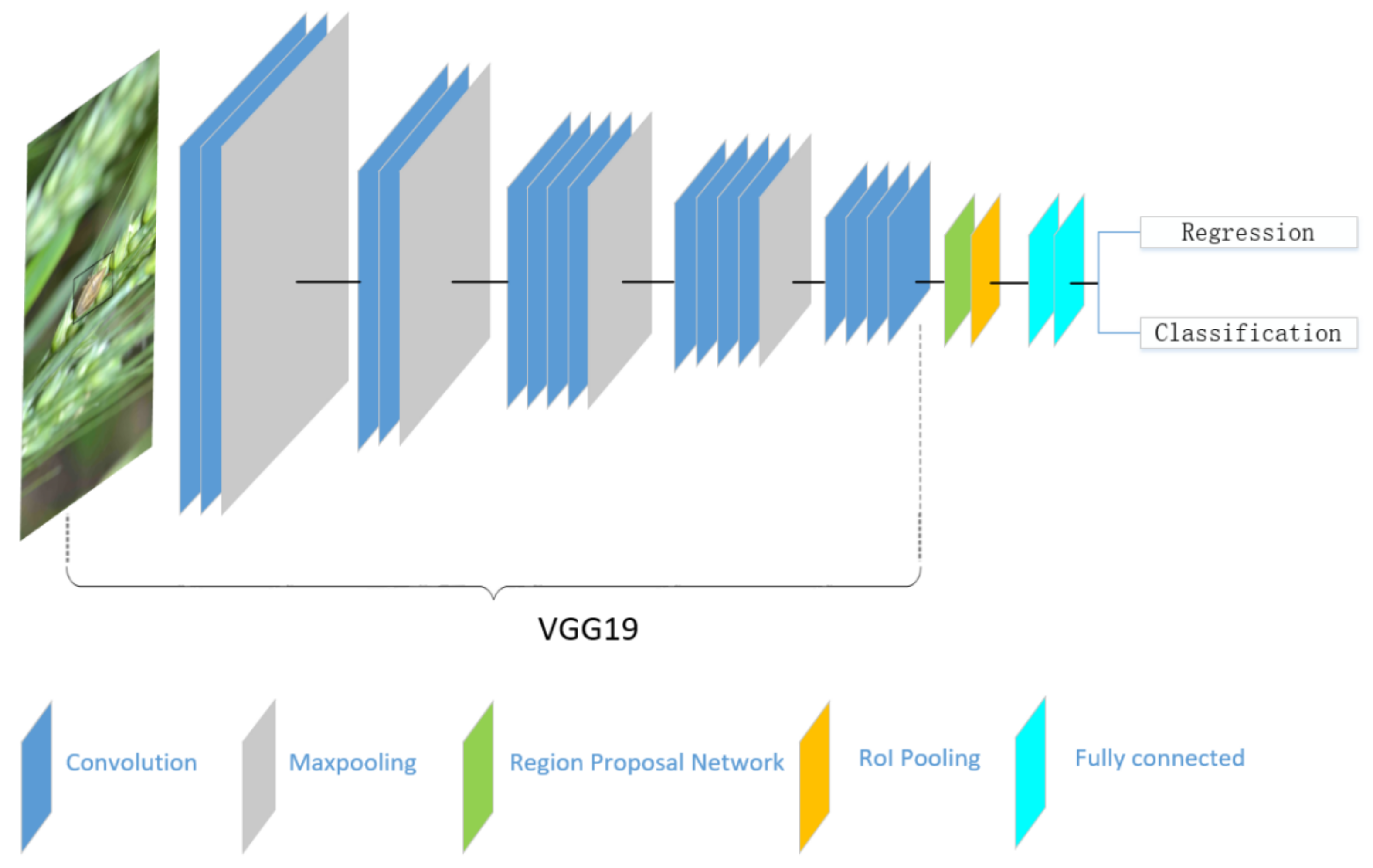
- During the first stage, VGG19 [20] is adopted, which is a deep network consisting of 19 layers to extract high-dimensional features from insect images, as well as RPN, which combines highly abstracted information trained to learn the actual locations of insects in images;
- 2)
- During the second stage, the feature maps are reshaped to a uniform size and converted into a one-dimensional vector for insect classification.
2. Materials and Methods
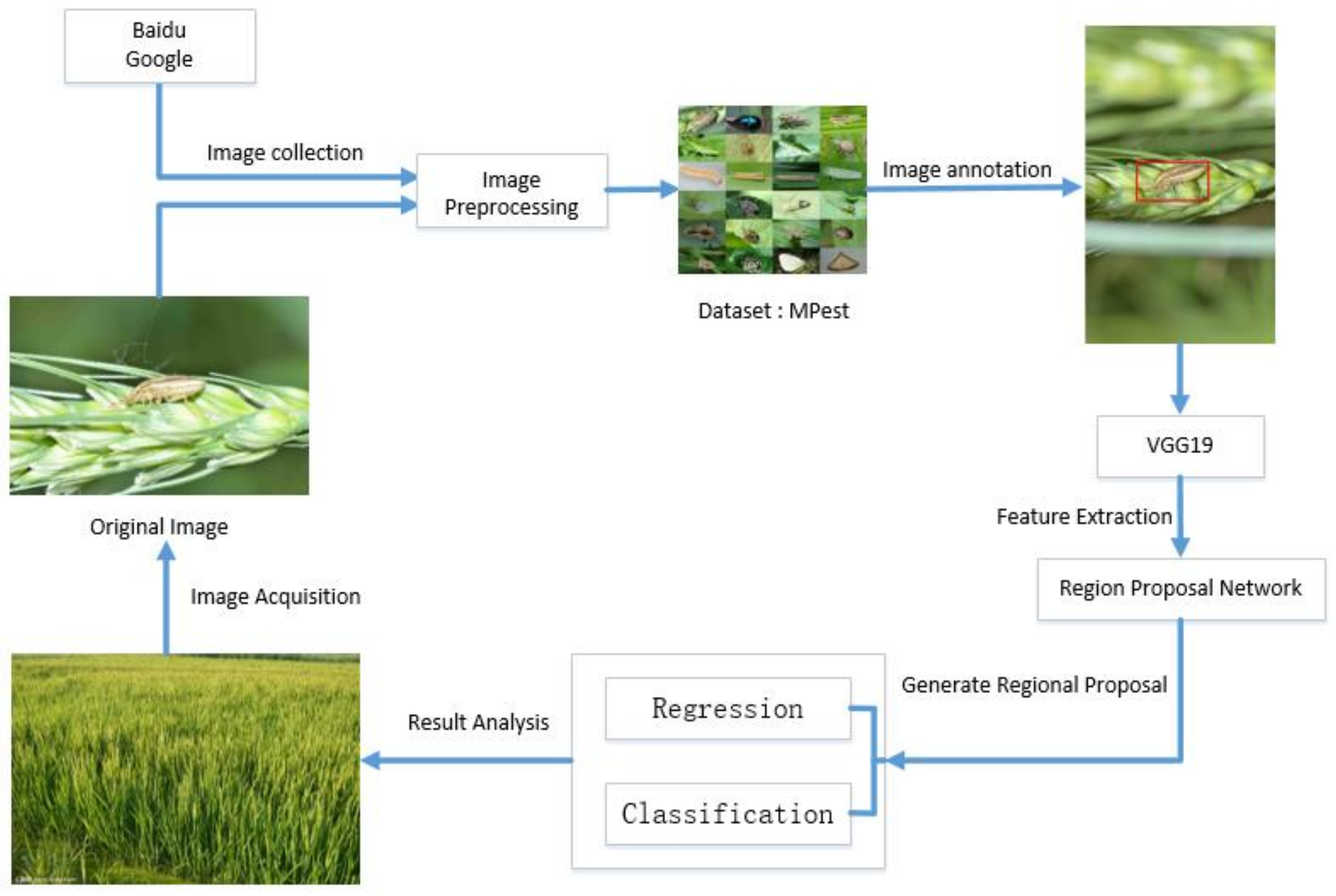
2.1. Dataset: Data Preprocessing and Augmentation
2.2. Deep Learning
2.3. Overall CNN Architecture
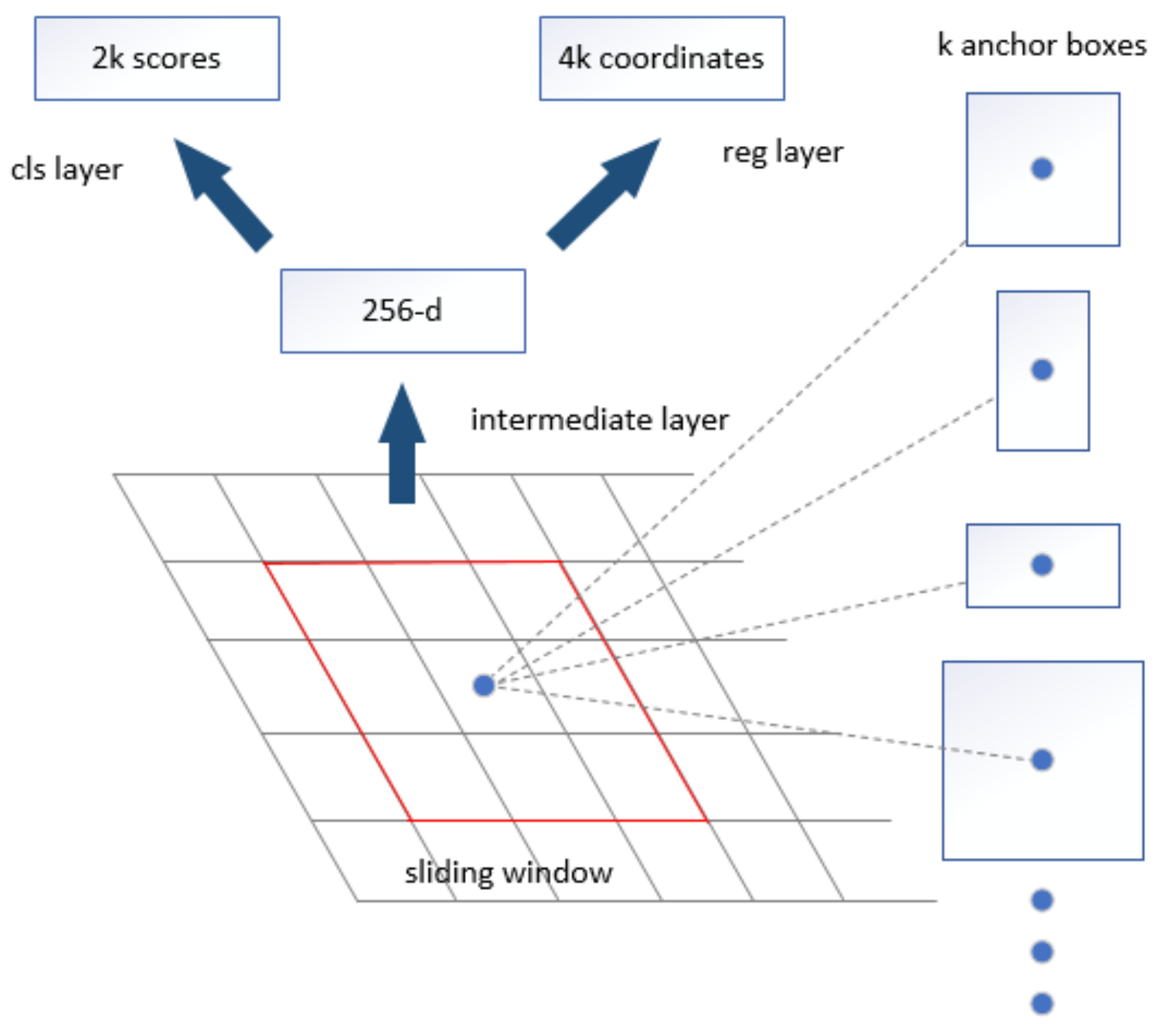
2.4. Region Proposal Network
Training Region Proposal Network
2.5. Loss Function
2.6. Training Overall Model
3. Experiments and Results
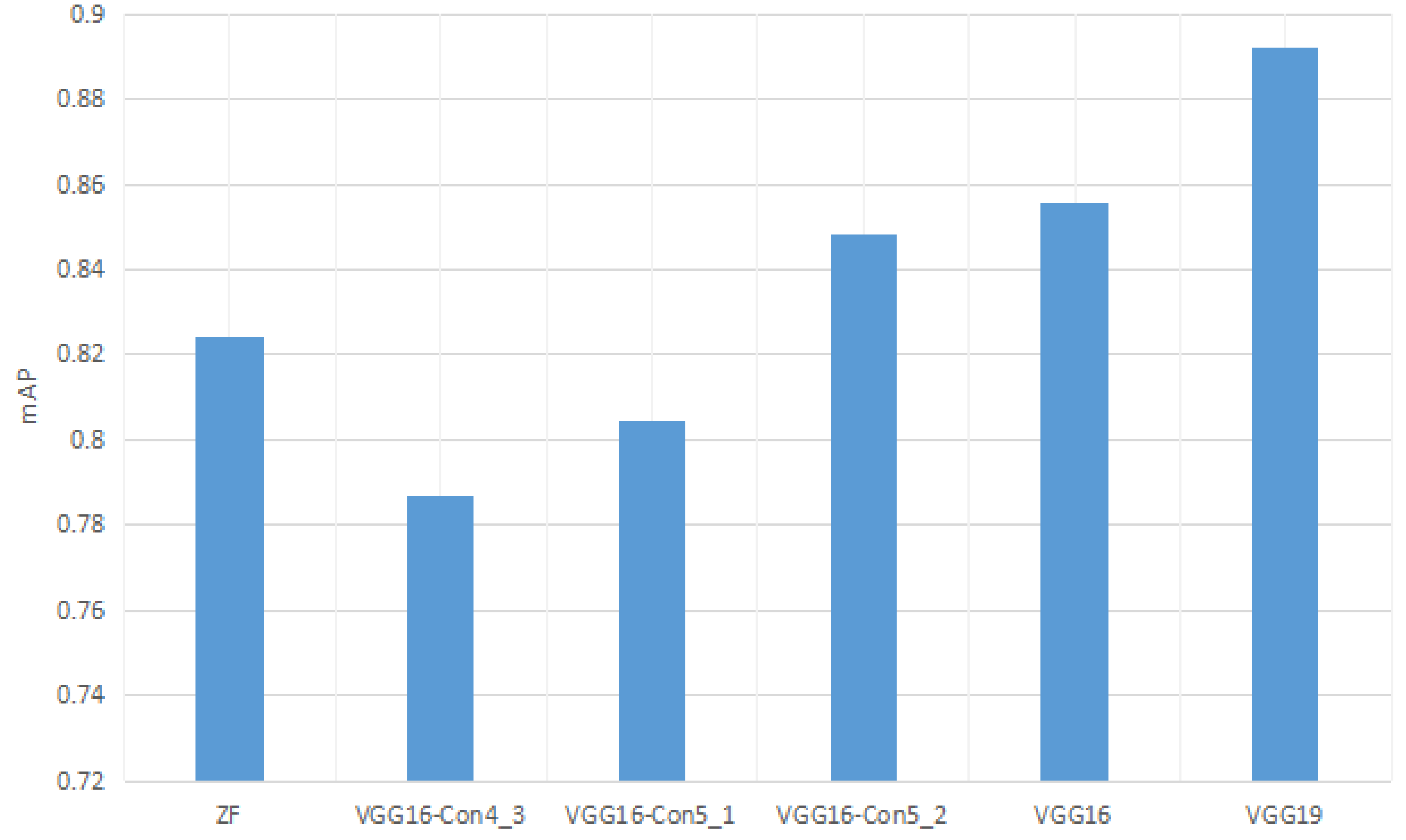
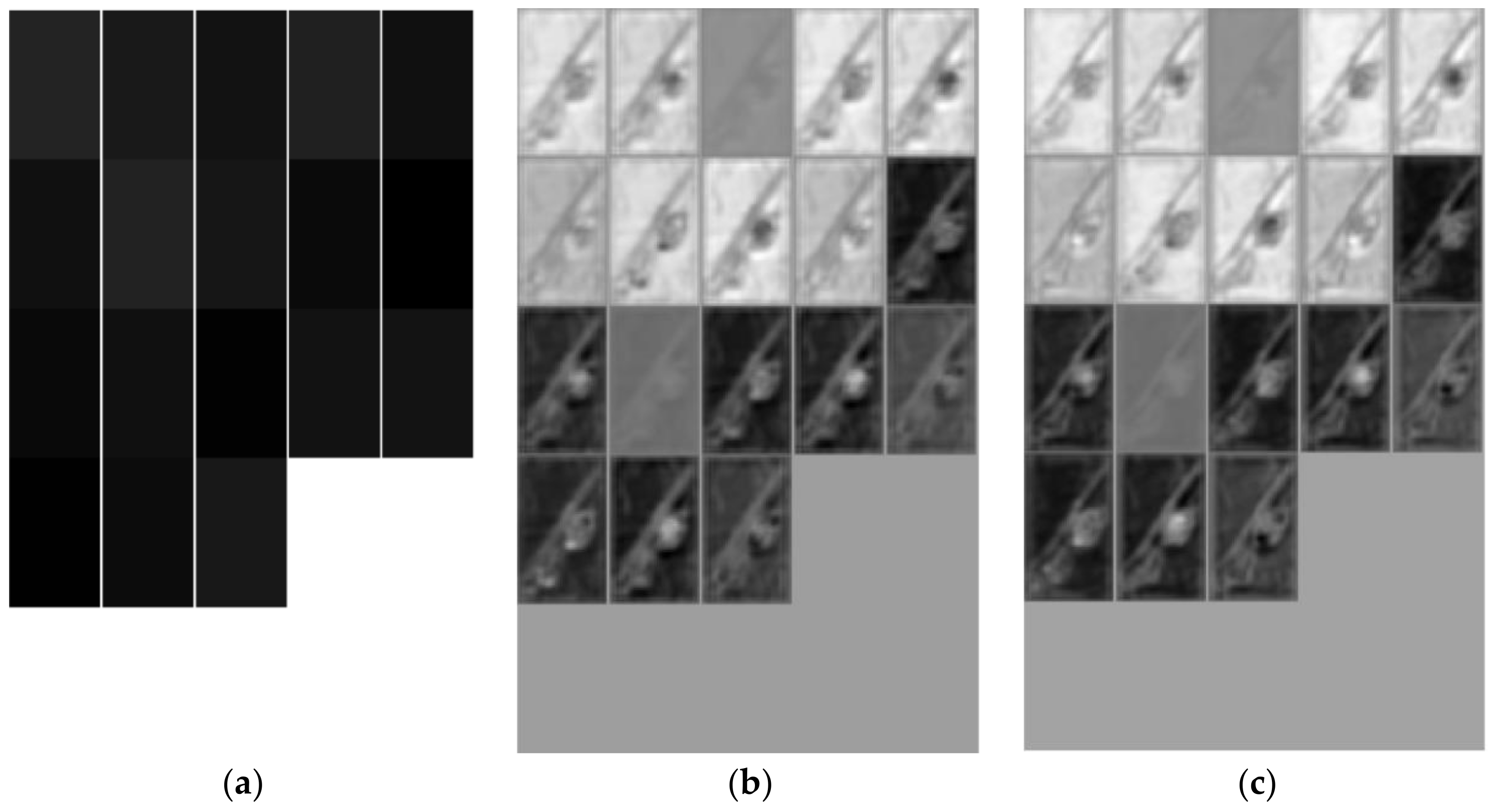
3.1. Effects of Feature Extraction Network
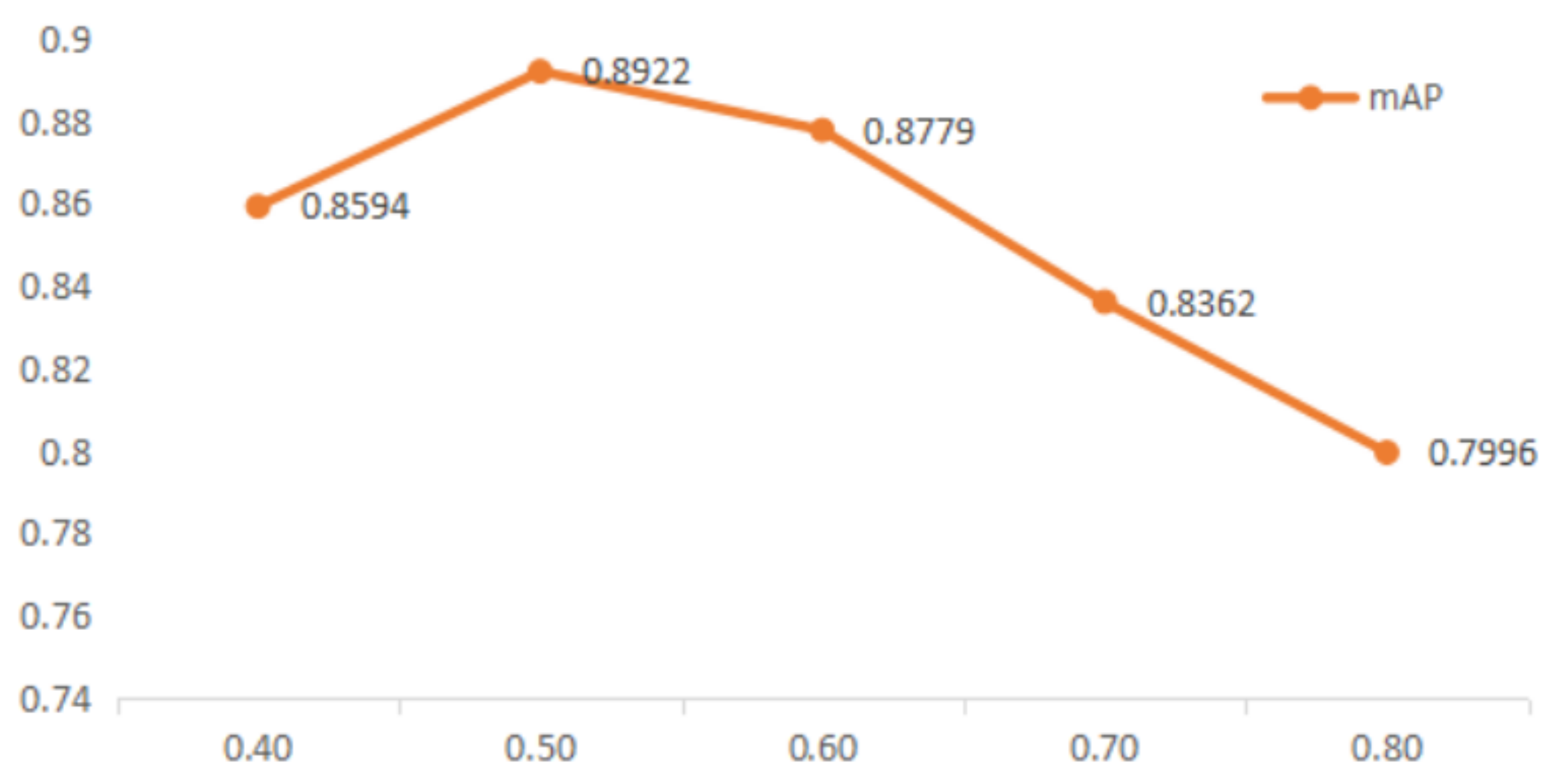
3.2. Effects of Iou Threshold
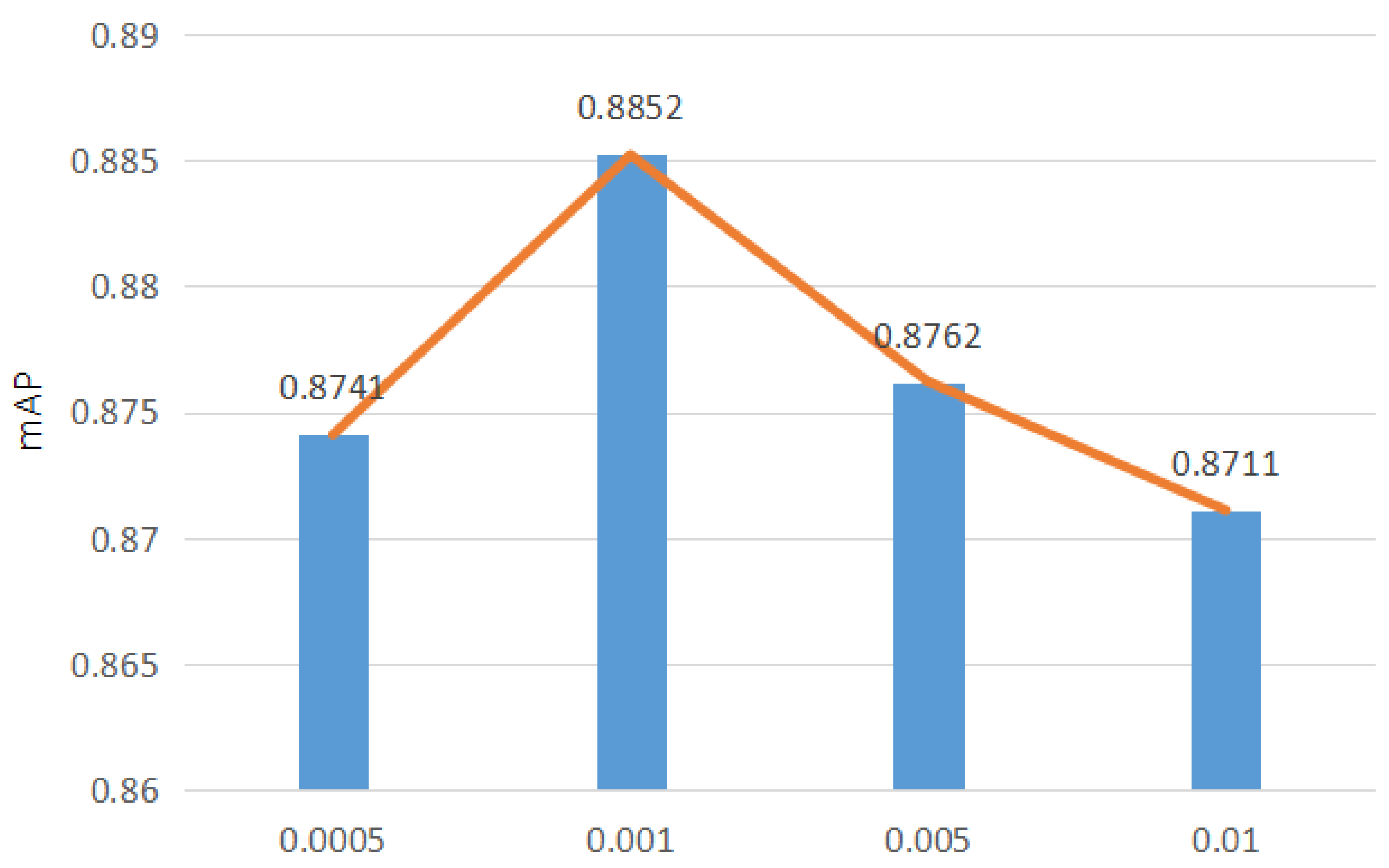
3.3. Effects of Learning Rate
3.4. Performance Comparison with Other Methods
4. Conclusions and Future Work
- 1)
- The insect database needs to be augmented, which can be manually collected in the future;
- 2)
- More appropriate models to extract helpful insect-like areas from images should be tried;
- 3)
- Regarding the classification task, the classification of insects needs to be more detailed, and the periods of insect growth should be divided. Workers will implement different pest control measures according to the period of insect growth.
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Estruch, J.J.; Carozzi, N.B.; Desai, N.; Duck, N.B.; Warren, G.W.; Koziel, M.G. Transgenic plants: An emerging approach to pest control. Nat. Biotechnol. 1997, 15, 137–141. [Google Scholar] [CrossRef] [PubMed]
- Fedor, P.; Vaňhara, J.; Havel, J.; Malenovsky, I.; Spellerberg, I. Artificial intelligence in pest insect monitoring. Syst. Entomol. 2009, 34, 398–400. [Google Scholar] [CrossRef]
- Hanysyam, M.N.M.; Fauziah, I.; Khairiyah, M.H.S.; Fairuz, K.; Rasdi, Z.M.; Zfarina, M.Z.N.; Elfira, S.E.; Ismail, R.; Norazliza, R. Entomofaunal Diversity of insects in FELDA Gunung Besout 6, Sungkai, Perak. In Proceedings of the 2013 IEEE Business Engineering and Industrial Applications Colloquium (BEIAC), Langkawi, Malaysia, 7–9 April 2013; pp. 234–239. [Google Scholar]
- Gaston, K.J. The Magnitude of Global Insect Species Richness. Conserv. Biol. 2010, 5, 283–296. [Google Scholar] [CrossRef]
- Siemann, E.; Tilman, D.; Haarstad, J. Insect species diversity, abundance and body size relationships. Nature 1996, 380, 704–706. [Google Scholar] [CrossRef]
- Zhang, H.; Huo, Q.; Ding, W. The application of AdaBoost-neural network in storedproduct insect classification. In Proceedings of the IEEE International Symposium on It in Medicine and Education, Xiamen, China, 12–14 December 2009; pp. 973–976. [Google Scholar]
- Xie, C.; Zhang, J.; Li, R.; Li, J.; Hong, P.; Xia, J.; Chen, P. Automatic classification for field crop insects via multiple-task sparse representation and multiple-kernel learning. Comput. Electron. Agric. 2015, 119, 123–132. [Google Scholar] [CrossRef]
- Xie, C.; Wang, R.; Zhang, J.; Chen, P.; Li, R.; Chen, T.; Chen, H. Multi-level learning features for automatic classification of field crop pests. Comput. Electron. Agric. 2018, 152, 233–241. [Google Scholar] [CrossRef]
- Szeliski, R. Computer Vision: Algorithms and Applications; Springer: London, UK, 2010; Volume 21, pp. 2601–2605. [Google Scholar]
- Li, H.; Wu, Z.; Zhang, J. Pedestrian detection based on deep learning model. In Proceedings of the International Congress on Image and Signal Processing, Biomedical Engineering and Informatics, Datong, China, 15–17 October 2017; pp. 796–800. [Google Scholar]
- Everingham, M.; Eslami, S.M.A.; Gool, L.V.; Williams, C.K.I.; Winn, J.; Zisserman, A. The Pascal, Visual Object Classes Challenge: A Retrospective. Int. J. Comput. Vis. 2015, 111, 98–136. [Google Scholar] [CrossRef]
- Lin, D.; Lu, C.; Huang, H.; Jia, J. RSCM: Region Selection and Concurrency Model for Multi-class Weather Classification. IEEE Trans. Image Process. 2017, 26, 4154–4167. [Google Scholar] [CrossRef] [PubMed]
- Keys, R. Cubic convolution interpolation for digital image processing. IEEE Trans. Acoust. Speech Signal Process. 2003, 29, 1153–1160. [Google Scholar] [CrossRef]
- Lim, S.; Kim, S.; Kim, D. Performance effect analysis for insect classification using convolutional neural network. In Proceedings of the 2017 7th IEEE International Conference on Control System, Computing and Engineering (ICCSCE), Penang, Malaysia, 24–26 November 2017; pp. 210–215. [Google Scholar]
- Yalcin, H. Vision based automatic inspection of insects in pheromone traps. In Proceedings of the International Conference on Agro-Geoinformatics, Istanbul, Turkey, 20–24 July 2015; pp. 333–338. [Google Scholar]
- Pjd, W.; O’Neill, M.A.; Gaston, K.J.; Gauld, I.D. Automating insect identification: Exploring the limitations of a prototype system. J. Appl. Entomol. 2010, 123, 1–8. [Google Scholar]
- Mayo, M.; Watson, A.T. Automatic Species Identification of Live Moths. Knowl.-Based Syst. 2007, 20, 195–202. [Google Scholar] [CrossRef]
- Ding, W.; Taylor, G. Automatic moth detection from trap images for pest management. Comput. Electron. Agric. 2016, 123, 17–28. [Google Scholar] [CrossRef]
- Lecun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436. [Google Scholar] [CrossRef] [PubMed]
- Simonyan, K.; Zisserman, A. Very Deep Convolutional Networks for Large-Scale Image Recognition. arXiv, 2014; arXiv:1409.1556. [Google Scholar]
- Kirkland, E.J. Bilinear Interpolation. Advanced Computing in Electron Microscopy; Springer: Boston, MA, USA, 2010; pp. 261–263. [Google Scholar]
- Chan, R.H.; Ho, C.W.; Nikolova, M. Salt-and-pepper noise removal by median-type noise detectors and detail-preserving regularization. IEEE Trans. Image Process. A Publ. IEEE Signal Process. Soc. 2005, 14, 1479–1485. [Google Scholar] [CrossRef]
- Du, X.; Cai, Y.; Wang, S.; Zhang, L. Overview of deep learning. In Proceedings of the 2016 31st Youth Academic Annual Conference of Chinese Association of Automation (YAC), Wuhan, China, 11–13 November 2016; pp. 159–164. [Google Scholar]
- Lecun, Y.; Bottou, L.; Bengio, Y.; Haffner, P. Gradient-based learning applied to document recognition. Proc. IEEE 1998, 86, 2278–2324. [Google Scholar] [CrossRef]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards real-time object detection with region proposal networks. In International Conference on Neural Information Processing Systems; MIT Press: Cambridge, MA, USA, 2015; pp. 91–99. [Google Scholar]
- Sommer, L.; Schumann, A.; Schuchert, T.; Beyerer, J. Multi Feature Deconvolutional Faster R-CNN for Precise Vehicle Detection in Aerial Imagery. In Proceedings of the IEEE Winter Conference on Applications of Computer Vision. IEEE Computer Society, Lake Tahoe, NV, USA, 12–15 March 2018; pp. 635–642. [Google Scholar]
- Razavian, A.S.; Azizpour, H.; Sullivan, J.; Carlsson, S. CNN features off-the-shelf: An astounding baseline for recognition. In Proceedings of the 2014 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR 2014), Columbus, OH, USA, 24–27 June 2014. [Google Scholar]
- Girshick, R. Fast R-CNN. In Proceedings of the 2015 IEEE International Conference on Computer Vision (ICCV), Santiago, Chile, 7–13 December 2015; pp. 1440–1448. [Google Scholar]
- Jia, Y.; Shelhamer, E.; Donahue, J.; Karayev, S.; Long, J.; Gir-shick, R.; Guadarrama, S.; Darrell, T. Caffe: Convolutional architecture for fast feature embedding. In Proceedings of the ACM International Conference on Multimedia, Orlando, FL, USA, 3–7 November 2014; pp. 675–678. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Species | Quantity | Species | Quantity | Species | Quantity |
|---|---|---|---|---|---|
| Aeliasibirica | 66 | Colposcelissignata | 73 | Mythimnaseparta | 49 |
| Atractomorphasinensis | 60 | Dolerustritici | 91 | Nephotettixbipunctatus | 66 |
| Chilosuppressalis | 53 | Erthesinafullo | 49 | Pentfaleus major | 83 |
| Chromatomyiahorticola | 51 | Eurydemadominulus | 128 | Pierisrapae | 61 |
| Cifunalocuples | 47 | Eurydemagebleri | 42 | Sitobionavenae | 60 |
| Cletus punctiger | 60 | Eysacorisguttiger | 60 | Sogatellafurcifera | 71 |
| Cnaphalocrocismedinalis | 53 | Laodelphaxstriatellua | 82 | Sympiezomiasvelatus | 55 |
| Colaphellusbowvingi | 56 | Marucatestulalis | 56 | Tettigellaviridis | 55 |
| Method | mAP | Inference Time(s)/Per Image | Training Time(h) |
|---|---|---|---|
| Proposed method | 0.8922 | 0.083 | 11.2 |
| SSD | 0.8534 | 0.120 | 38.4 |
| Fast RCNN | 0.7964 | 0.195 | 70.1 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xia, D.; Chen, P.; Wang, B.; Zhang, J.; Xie, C. Insect Detection and Classification Based on an Improved Convolutional Neural Network. Sensors 2018, 18, 4169. https://doi.org/10.3390/s18124169
Xia D, Chen P, Wang B, Zhang J, Xie C. Insect Detection and Classification Based on an Improved Convolutional Neural Network. Sensors. 2018; 18(12):4169. https://doi.org/10.3390/s18124169
Chicago/Turabian StyleXia, Denan, Peng Chen, Bing Wang, Jun Zhang, and Chengjun Xie. 2018. "Insect Detection and Classification Based on an Improved Convolutional Neural Network" Sensors 18, no. 12: 4169. https://doi.org/10.3390/s18124169
APA StyleXia, D., Chen, P., Wang, B., Zhang, J., & Xie, C. (2018). Insect Detection and Classification Based on an Improved Convolutional Neural Network. Sensors, 18(12), 4169. https://doi.org/10.3390/s18124169