Whisper: Programmable and Flexible Control on Industrial IoT Networks



Abstract
1. Introduction
- We describe the basics of Whisper, and compelling use cases unlocked by our system (Section 3.1).
- We detail the design of the Whisper controllers, along with their internal algorithms to translate high-level policies into a limited number of control messages (Section 3.3 and Section 3.4).
- We pinpoint the limitations of only relying on a single Whisper controller, and show how the controller can systematically use Whisper Nodes (if deployed or deployable) to circumvent those limitations (Section 4).
- We outline Whisper longer-term perspectives (Section 7).
2. Background
2.1. Whisper with Respect to Related Work
2.2. Background on LLN and IoT Protocols
3. Whisper Framework: SDN without SDN
3.1. Central IoT Control by Whisper-Ing
3.2. The Need for More Whisper Nodes
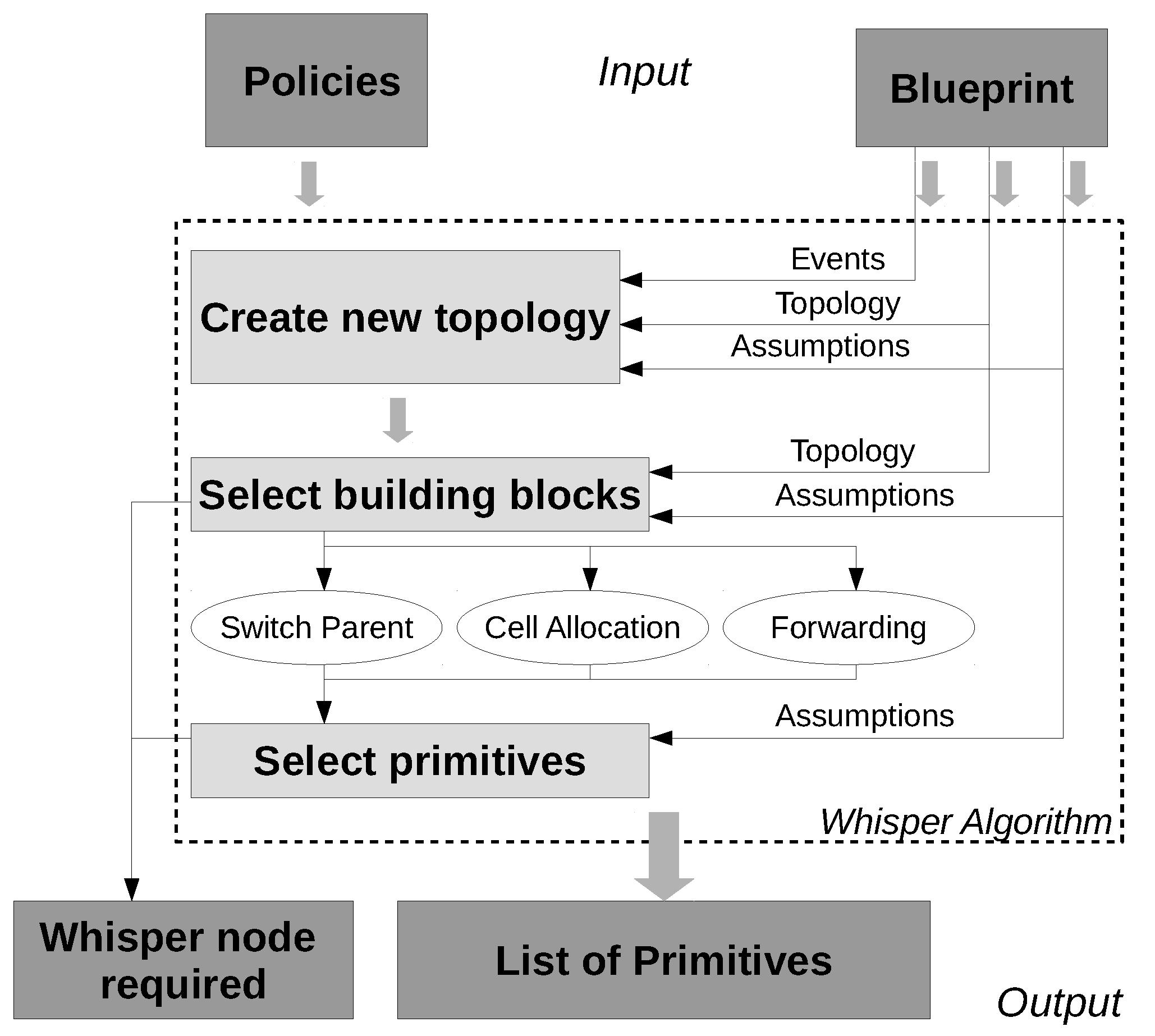
3.3. Architecture
3.4. Algorithms Description
3.4.1. Creating New Topology
| Algorithm 1 Create new topology |
|
3.4.2. Selecting Building Blocks
| Algorithm 2 Select Building Blocks |
|
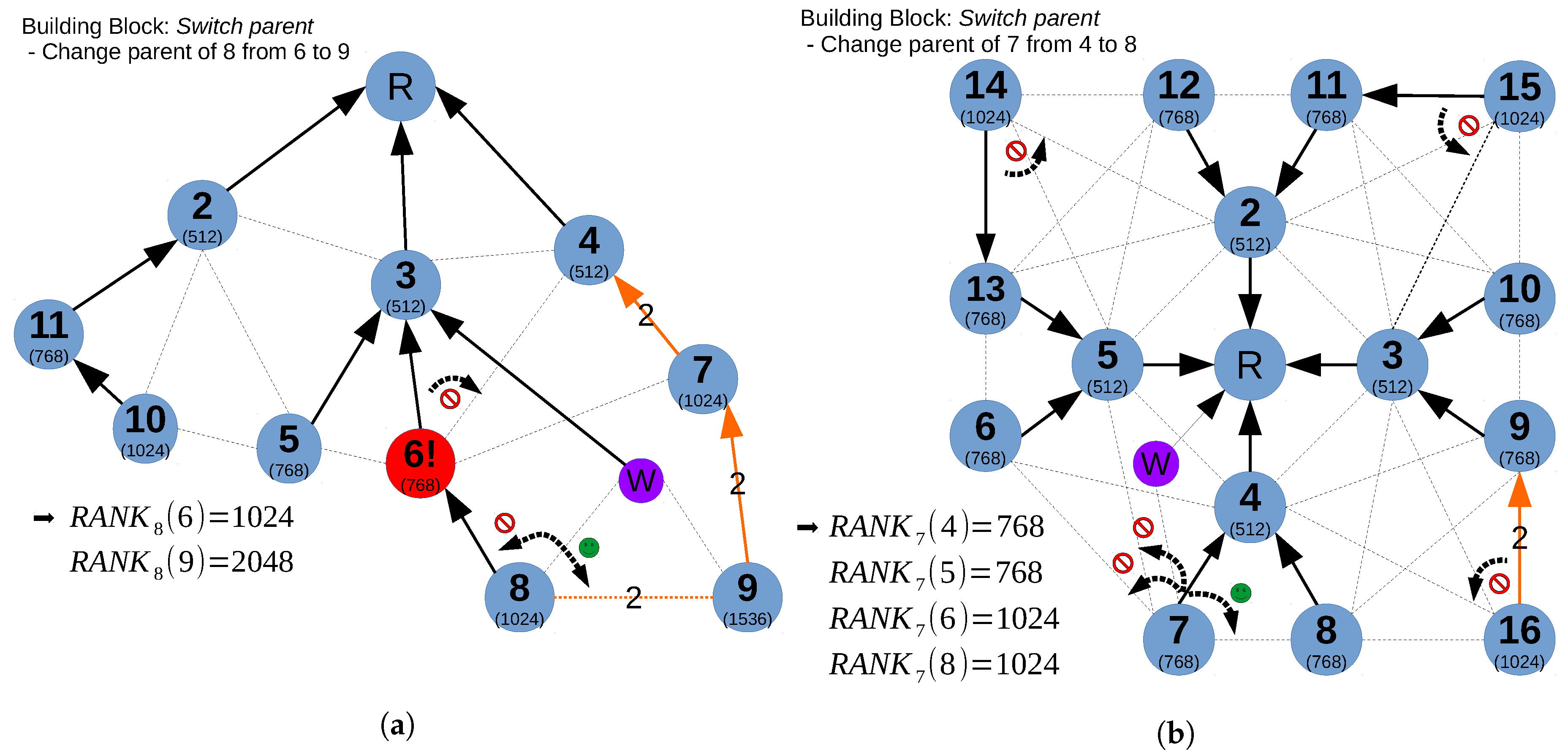
3.4.3. Selecting Primitives
| Algorithm 3 Select Primitives: Switch Parent block |
|
4. Coordination of Whisper Nodes
4.1. Augmenting Network Topology with Whisper Nodes
4.2. Adding and Managing Whisper Nodes
5. Whisper Specifications
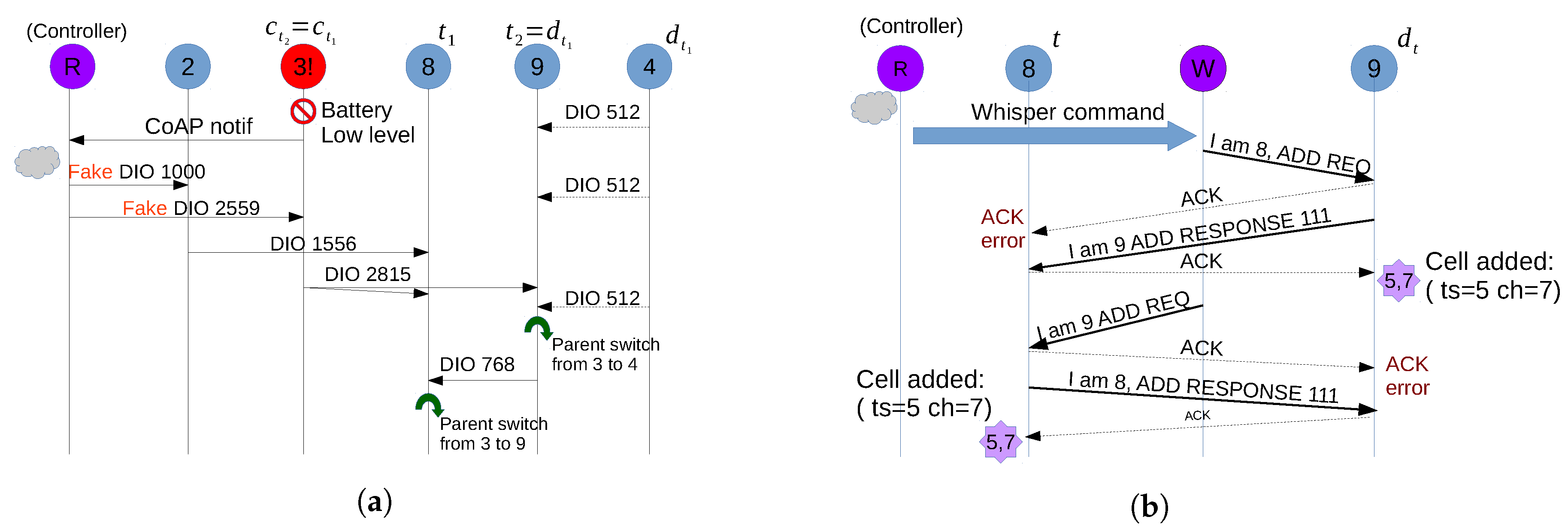
5.1. Injecting Fake DIOs
- Primitive 1: Fake DIO sent in unicast from the root to the t node remotely. It is considered as a normal DATA IPv6 packet in order to reach the remote destination, so it has the local MAC destination address of the next hop and the IP destination address of the remote node t. This type of fake DIO can only be used for supplanting the previous parent of t, but it has the advantage of being able to remotely trigger a parent switch in a node several hops away with only one message and without the need of modifying the rank of an entire branch, controlling the root node or using a Whisper node.
- Primitive 2: Fake DIO sent periodically in unicast from the root (MAC and IP source address) to the first node of the branch of t (MAC and IP destination address). When these types of DIOs are present, all DIOs sent from the root are sent in unicast, customizing the rank that each branch needs to have and replacing the normal DIOs sent in broadcast. Since these DIOs are sent periodically, the value of the rank in that branch will be constantly updated and propagated along the branch. Although this primitive is normally used in combination with Primitive 1 to make the most preferable parent, it can also trigger parent switches by itself.
- Primitive 3: Fake DIO sent in unicast from a Whisper node to t node locally. This DIO has the MAC and IP source address of the node that the Whisper node is supplanting and the MAC and IP destination address of the t node. This primitive can also be used for both switching a parent or in combination with Primitive 1. It is used for finding feasible solutions for some cases such as Example 2 in Figure 4.
- Primitive 4: Fake DIO sent in unicast from the Whisper node to the local t node periodically, the Whisper node being the desired parent of t. This type of DIO is equivalent to Primitive 2, with a Whisper node instead. This primitive is used when it is necessary to announce the presence of a Whisper node enabled for active traffic forwarding in the network.
5.2. Injecting Fake 6P Commands
5.3. Implementation Details
6. Evaluation
6.1. Testing Environment
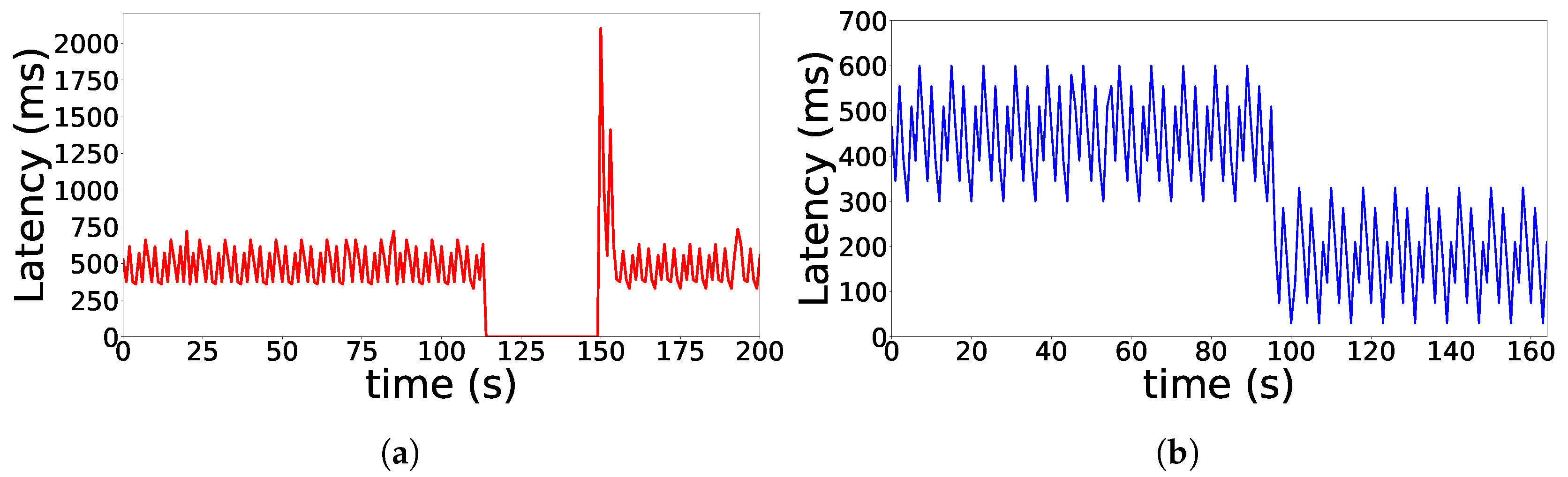
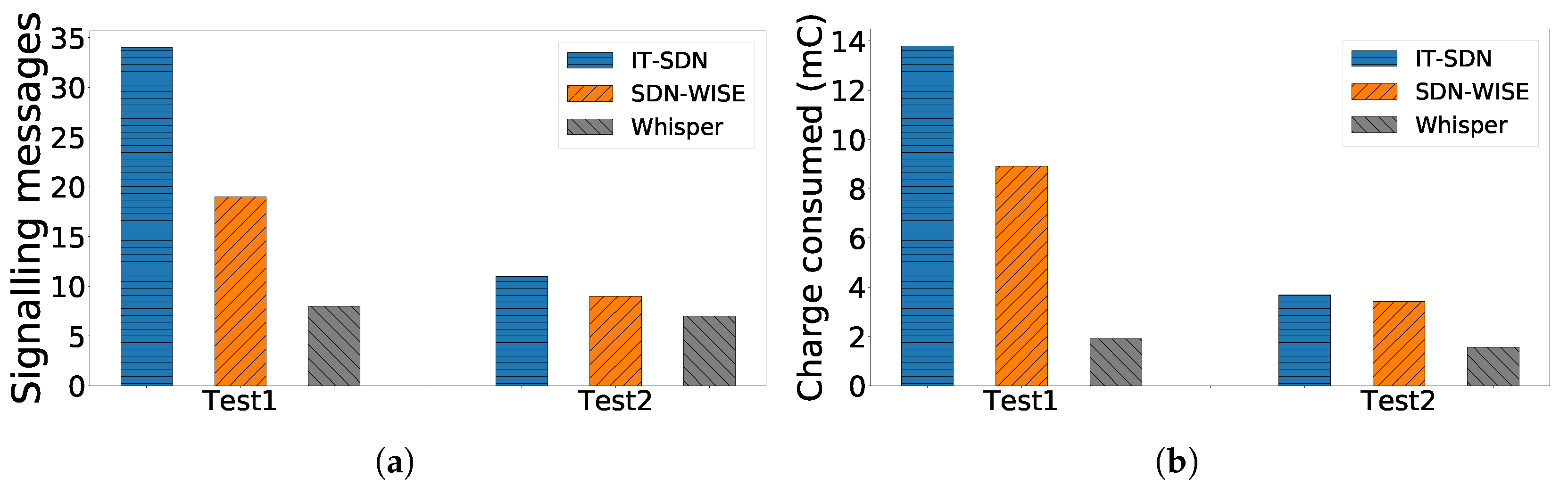
6.2. Results
7. Whisper Roadmap
8. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Hu, F.; Hao, Q.; Bao, K. A survey on software-defined network and openflow: From concept to implementation. IEEE Commun. Surv. Tutor. 2014, 16, 2181–2206. [Google Scholar] [CrossRef]
- Nunes, B.A.A.; Mendonca, M.; Nguyen, X.N.; Obraczka, K.; Turletti, T. A survey of software-defined networking: Past, present, and future of programmable networks. IEEE Commun. Surv. Tutor. 2014, 16, 1617–1634. [Google Scholar] [CrossRef]
- Huang, H.; Li, P.; Guo, S.; Zhuang, W. Software-defined wireless mesh networks: Architecture and traffic orchestration. IEEE Netw. 2015, 29, 24–30. [Google Scholar] [CrossRef]
- Winter, T. RPL: IPv6 Routing Protocol for Low-Power and Lossy Networks; Internet Engineering Task Force: Fremont, CA, USA, 2012. [Google Scholar]
- Dujovne, D.; Watteyne, T.; Vilajosana, X.; Thubert, P. 6TiSCH: Deterministic IP-enabled industrial internet (of things). IEEE Commun. Mag. 2014, 52, 36–41. [Google Scholar] [CrossRef]
- Emerson Industrial Wireless Technology. Available online: www.emerson.com/en-us/expertise/automation/industrial-internet-things/pervasive-sensing-solutions/wireless-technology (accessed on 20 November 2018).
- Perkins, C.E.; Bhagwat, P. Highly dynamic destination-sequenced distance-vector routing (DSDV) for mobile computers. ACM SIGCOMM Comput. Commun. Rev. 1994, 24, 234–244. [Google Scholar] [CrossRef]
- Perkins, C.; Belding-Royer, E.; Das, S. Ad Hoc On-Demand Distance Vector (AODV) Routing; Technical Report; Internet Engineering Task Force: Fremont, CA, USA, 2003. [Google Scholar]
- Biswas, S.; Morris, R. Opportunistic routing in multi-hop wireless networks. ACM SIGCOMM Comput. Commun. Rev. 2004, 34, 69–74. [Google Scholar] [CrossRef]
- Johnson, D.; Hu, Y.C.; Maltz, D. The Dynamic Source Routing Protocol (DSR) for Mobile Ad Hoc Networks for IPv4; Technical Report; Internet Engineering Task Force: Fremont, CA, USA, 2007. [Google Scholar]
- Gnawali, O.; Fonseca, R.; Jamieson, K.; Moss, D.; Levis, P. Collection tree protocol. In Proceedings of the 7th ACM Conference on Embedded Networked Sensor Systems, Berkeley, CA, USA, 4–6 November 2009; pp. 1–14. [Google Scholar]
- Pantazis, N.A.; Nikolidakis, S.A.; Vergados, D.D. Energy-efficient routing protocols in wireless sensor networks: A survey. IEEE Commun. Surv. Tutor. 2013, 15, 551–591. [Google Scholar] [CrossRef]
- Ye, W.; Heidemann, J.; Estrin, D. An energy-efficient MAC protocol for wireless sensor networks. In Proceedings of the Twenty-First Annual Joint Conference of the IEEE Computer and Communications Societies, INFOCOM 2002, New York, NY, USA, 23–27 June 2002; Volume 3, pp. 1567–1576. [Google Scholar]
- Ye, W.; Silva, F.; Heidemann, J. Ultra-low duty cycle MAC with scheduled channel polling. In Proceedings of the 4th International Conference on Embedded Networked Sensor Systems, Boulder, CO, USA, 31 October–3 November 2006; pp. 321–334. [Google Scholar]
- Buettner, M.; Yee, G.V.; Anderson, E.; Han, R. X-MAC: A short preamble MAC protocol for duty-cycled wireless sensor networks. In Proceedings of the 4th International Conference on Embedded Networked Sensor Systems, Boulder, CO, USA, 31 October–3 November 2006; pp. 307–320. [Google Scholar]
- Sun, Y.; Gurewitz, O.; Johnson, D.B. RI-MAC: A receiver-initiated asynchronous duty cycle MAC protocol for dynamic traffic loads in wireless sensor networks. In Proceedings of the 6th ACM Conference on Embedded Network Sensor Systems, Raleigh, NC, USA, 5–7 November 2008; pp. 1–14. [Google Scholar]
- Pister, K.; Doherty, L. TSMP: Time synchronized mesh protocol. IASTED Distrib. Sens. Netw. 2008, 391, 398. [Google Scholar]
- Huang, P.; Xiao, L.; Soltani, S.; Mutka, M.W.; Xi, N. The evolution of MAC protocols in wireless sensor networks: A survey. IEEE Commun. Surv. Tutor. 2013, 15, 101–120. [Google Scholar] [CrossRef]
- McKeown, N.; Anderson, T.; Balakrishnan, H.; Parulkar, G.; Peterson, L.; Rexford, J.; Shenker, S.; Turner, J. OpenFlow: Enabling innovation in campus networks. ACM SIGCOMM Comput. Commun. Rev. 2008, 38, 69–74. [Google Scholar] [CrossRef]
- Galluccio, L.; Milardo, S.; Morabito, G.; Palazzo, S. SDN-WISE: Design, prototyping and experimentation of a stateful SDN solution for WIreless SEnsor networks. In Proceedings of the 2015 IEEE Conference on Computer Communications (INFOCOM), Hong Kong, China, 26 April–1 May 2015; pp. 513–521. [Google Scholar]
- De Oliveira, B.T.; Gabriel, L.B.; Margi, C.B. TinySDN: Enabling multiple controllers for software-defined wireless sensor networks. IEEE Lat. Am. Trans. 2015, 13, 3690–3696. [Google Scholar] [CrossRef]
- Kobo, H.I.; Abu-Mahfouz, A.M.; Hancke, G.P. A Survey on Software-Defined Wireless Sensor Networks: Challenges and Design Requirements. IEEE Access 2017, 5, 1872–1899. [Google Scholar] [CrossRef]
- Feamster, N.; Rexford, J.; Zegura, E. The road to SDN: An intellectual history of programmable networks. ACM SIGCOMM Comput. Commun. Rev. 2014, 44, 87–98. [Google Scholar] [CrossRef]
- Kreutz, D.; Ramos, F.M.; Verissimo, P.E.; Rothenberg, C.E.; Azodolmolky, S.; Uhlig, S. Software-defined networking: A comprehensive survey. Proc. IEEE 2015, 103, 14–76. [Google Scholar] [CrossRef]
- Jain, S.; Kumar, A.; Mandal, S.; Ong, J.; Poutievski, L.; Singh, A.; Venkata, S.; Wanderer, J.; Zhou, J.; Zhu, M.; et al. B4: Experience with a globally-deployed software defined WAN. ACM SIGCOMM Comput. Commun. Rev. 2013, 43, 3–14. [Google Scholar] [CrossRef]
- Vissicchio, S.; Vanbever, L.; Rexford, J. Sweet little lies: Fake topologies for flexible routing. In Proceedings of the 13th ACM Workshop on Hot Topics in Networks, Los Angeles, CA, USA, 27–28 October 2014; p. 3. [Google Scholar]
- Vissicchio, S.; Tilmans, O.; Vanbever, L.; Rexford, J. Central control over distributed routing. ACM SIGCOMM Comput. Commun. Rev. 2015, 45, 43–56. [Google Scholar] [CrossRef]
- Haque, I.T.; Abu-Ghazaleh, N. Wireless software defined networking: A survey and taxonomy. IEEE Commun. Surv. Tutor. 2016, 18, 2713–2737. [Google Scholar] [CrossRef]
- Lei, T.; Lu, Z.; Wen, X.; Zhao, X.; Wang, L. SWAN: An SDN based campus WLAN framework. In Proceedings of the 2014 4th International Conference on Wireless Communications, Vehicular Technology, Information Theory and Aerospace & Electronic Systems (VITAE), Aalborg, Denmark, 11–14 May 2014; pp. 1–5. [Google Scholar]
- Thubert, P.; Palattella, M.R.; Engel, T. 6TiSCH centralized scheduling: When SDN meet IoT. In Proceedings of the 2015 IEEE Conference on Standards for Communications and Networking (CSCN), Tokyo, Japan, 28–30 October 2015; pp. 42–47. [Google Scholar]
- Finn, N.; Thubert, P.; Varga, B.; Farkas, J. Deterministic Networking Architecture. Internet-Draft draft-ietf-detnet-architecture-04, Internet Engineering Task Force. Unpublished work. 2017. [Google Scholar]
- Thubert, P. An Architecture for IPv6 over the TSCH mode of IEEE 802.15.4. Internet-Draft draft-ietf-6tisch-architecture-13, Internet Engineering Task Force. Unpublished work. 2017. [Google Scholar]
- Costanzo, S.; Galluccio, L.; Morabito, G.; Palazzo, S. Software defined wireless networks: Unbridling sdns. In Proceedings of the 2012 European Workshop on Software Defined Networking (EWSDN), Darmstadt, Germany, 25–26 October 2012; pp. 1–6. [Google Scholar]
- De Oliveira, B.T.; Alves, R.C.A.; Margi, C.B. Software-defined wireless sensor networks and internet of things standardization synergism. In Proceedings of the 2015 IEEE Conference on Standards for Communications and Networking (CSCN), Tokyo, Japan, 28–30 October 2015; pp. 60–65. [Google Scholar]
- Akyildiz, I.F.; Lee, W.Y.; Vuran, M.C.; Mohanty, S. A survey on spectrum management in cognitive radio networks. IEEE Commun. Mag. 2008, 46, 40–48. [Google Scholar] [CrossRef]
- Watteyne, T.; Mehta, A.; Pister, K. Reliability through frequency diversity: Why channel hopping makes sense. In Proceedings of the 6th ACM Symposium on Performance Evaluation of Wireless Ad Hoc, Sensor, and Ubiquitous Networks, Canary Islands, Spain, 28–29 October 2009; pp. 116–123. [Google Scholar]
- Vilajosana, X.; Pister, K.; Watteyne, T. Minimal IPv6 over the TSCH Mode of IEEE 802.15.4e (6TiSCH) Configuration; RFC 8180; Internet Engineering Task Force: Fremont, CA, USA, 2017. [Google Scholar]
- Duquennoy, S.; Al Nahas, B.; Landsiedel, O.; Watteyne, T. Orchestra: Robust mesh networks through autonomously scheduled TSCH. In Proceedings of the 13th ACM Conference on Embedded Networked Sensor Systems, Seoul, Korea, 1–4 November 2015; pp. 337–350. [Google Scholar]
- Thubert, P. Objective Function Zero for the Routing Protocol for Low-Power and Lossy Networks (RPL); Internet Engineering Task Force: Fremont, CA, USA, 2012. [Google Scholar]
- Gaddour, O.; Koubâa, A. RPL in a nutshell: A survey. Comput. Netw. 2012, 56, 3163–3178. [Google Scholar] [CrossRef]
- Accettura, N.; Grieco, L.A.; Boggia, G.; Camarda, P. Performance analysis of the RPL routing protocol. In Proceedings of the 2011 IEEE International Conference on Mechatronics (ICM), Istanbul, Turkey, 13–15 April 2011; pp. 767–772. [Google Scholar]
- Tripathi, J.; de Oliveira, J.C.; Vasseur, J.P. A performance evaluation study of rpl: Routing protocol for low power and lossy networks. In Proceedings of the 2010 44th Annual Conference on Information Sciences and Systems (CISS), Princeton, NJ, USA, 17–19 March 2010; pp. 1–6. [Google Scholar]
- Duquennoy, S.; Landsiedel, O.; Voigt, T. Let the tree bloom: Scalable opportunistic routing with orpl. In Proceedings of the 11th ACM Conference on Embedded Networked Sensor Systems, Roma, Italy, 11–15 November 2013; p. 2. [Google Scholar]
- Dawson-Haggerty, S.; Tavakoli, A.; Culler, D. Hydro: A hybrid routing protocol for low-power and lossy networks. In Proceedings of the 2010 First IEEE International Conference on Smart Grid Communications (SmartGridComm), Gaithersburg, MD, USA, 4–6 October 2010; pp. 268–273. [Google Scholar]
- Liu, X.; Guo, J.; Bhatti, G.; Orlik, P.; Parsons, K. Load balanced routing for low power and lossy networks. In Proceedings of the 2013 IEEE Wireless Communications and Networking Conference (WCNC), Shanghai, China, 7–10 April 2013; pp. 2238–2243. [Google Scholar]
- Chang, T.; Watteyne, T.; Wang, Q.; Vilajosana, X. LLSF: Low Latency Scheduling Function for 6TiSCH Networks. In Proceedings of the Distributed Computing in Sensor Systems (DCOSS), Washington, DC, USA, 26–28 May 2016. [Google Scholar]
- Daneels, G.; Spinnewyn, B.; Latré, S.; Famaey, J. ReSF: Recurrent Low-Latency Scheduling in IEEE 802.15. 4e TSCH networks. Ad Hoc Netw. 2018, 69, 100–114. [Google Scholar] [CrossRef]
- Muraoka, K.; Watteyne, T.; Accettura, N.; Vilajosana, X.; Pister, K.S. Simple distributed scheduling with collision detection in tsch networks. IEEE Sens. J. 2016, 16, 5848–5849. [Google Scholar] [CrossRef]
- Chang, T.; Watteyne, T.; Vilajosana, X.; Wang, Q. CCR: Cost-aware cell relocation in 6TiSCH networks. Trans. Emerg. Telecommun. Technol. 2018, 29, e3211. [Google Scholar] [CrossRef]
- Esteban, M.; Kathleen, S.; Steven, L. A distributed density optimized scheduling function for IEEE 802.15.4e TSCH networks. Trans. Emerg. Telecommun. Technol. 2018, 29, e3420. [Google Scholar] [CrossRef]
- Shelby, Z.; Hartke, K.; Bormann, C. The Constrained Application Protocol (CoAP); Internet Engineering Task Force: Fremont, CA, USA, 2014. [Google Scholar]
- Levis, P.; Clausen, T.H. The Trickle Algorithm; Internet Engineering Task Force: Fremont, CA, USA, 2011. [Google Scholar]
- Schonwalder, J.; Bjorklund, M.; Shafer, P. Network configuration management using NETCONF and YANG. IEEE Commun. Mag. 2010, 48, 166–173. [Google Scholar] [CrossRef]
- Bjorklund, M. YANG—A Data Modeling Language for the Network Configuration Protocol (NETCONF); RFC 6020; Internet Engineering Task Force: Fremont, CA, USA, 2010. [Google Scholar] [CrossRef]
- Van de Velde, B. IEEE 802.15.4 Sniffer for OpenMote-CC2538. Available online: https://github.com/imec-idlab/OpenMote-CC2538-Sniffer (accessed on 20 November 2018).
- Dawans, S.; Deru, L. Demo Abstract: Foren 6 a RPL/6LoWPAN Diagnosis Tool. In Proceedings of the 11th European Conference on Wireless Sensor Networks (EWSN), Oxford, UK, 17–19 February 2014. [Google Scholar]
- Watteyne, T.; Vilajosana, X. Using the OpenWSN Oos_sniffer Project: 16-Channel Sniffer. Available online: https://openwsn.atlassian.net/wiki/spaces/OW/pages/688212/Sniffers (accessed on 20 November 2018).
- Narten, T.; Simpson, W.A.; Nordmark, E.; Soliman, H. Neighbor Discovery for IP Version 6 (IPv6); Internet Engineering Task Force: Fremont, CA, USA, 2007. [Google Scholar]
- Shelby, Z.; Chakrabarti, S.; Nordmark, E.; Bormann, C. Neighbor Discovery Optimization for IPv6 over Low-Power Wireless Personal Area Networks (6LoWPANs); Technical Report; Internet Engineering Task Force: Fremont, CA, USA, 2012. [Google Scholar]
- Kohvakka, M.; Suhonen, J.; Kuorilehto, M.; Kaseva, V.; Hännikäinen, M.; Hämäläinen, T.D. Energy-efficient neighbor discovery protocol for mobile wireless sensor networks. Ad Hoc Netw. 2009, 7, 24–41. [Google Scholar] [CrossRef]
- Lim, H.; Kung, L.C.; Hou, J.C.; Luo, H. Zero-Configuration, Robust Indoor Localization: Theory and Experimentation; Technical Report; Internet Engineering Task Force: Fremont, CA, USA, 2005. [Google Scholar]
- Castro, P.; Chiu, P.; Kremenek, T.; Muntz, R. A probabilistic room location service for wireless networked environments. In Proceedings of the International Conference on Ubiquitous Computing, Atlanta, GA, USA, 30 September–2 October 2001; pp. 18–34. [Google Scholar]
- Krishnan, P.; Krishnakumar, A.; Ju, W.H.; Mallows, C.; Gamt, S. A system for LEASE: Location estimation assisted by stationary emitters for indoor RF wireless networks. In Proceedings of the Twenty-Third Annual Joint Conference of the IEEE Computer and Communications Societies, INFOCOM 2004, Hong Kong, China, 7–11 March 2004; Volume 2, pp. 1001–1011. [Google Scholar]
- Vilajosana, X.; Tuset, P.; Watteyne, T.; Pister, K. OpenMote: Open-source prototyping platform for the industrial IoT. In Proceedings of the International Conference on Ad Hoc Networks, San Remo, Italy, 1–2 September 2015; pp. 211–222. [Google Scholar]
- OpenWSN Release 1.14.0. Available online: https://github.com/openwsn-berkeley/openwsn-fw/releases/tag/REL-1.14.0 (accessed on 20 November 2018).
- Whisper Repository: Collection of software used for implementing Whisper. Available online: https://github.com/imec-idlab/whisper-repository (accessed on 20 November 2018).
- Alves, R.C.; Oliveira, D.A.; Nez, G.; Margi, C.B. IT-SDN: Improved architecture for SDWSN. In Proceedings of the XXXV Brazilian Symposium on Computer Networks and Distributed Systems, Belem, Brazil, 15–19 May 2017. [Google Scholar]
- Dunkels, A.; Schmidt, O.; Finne, N.; Eriksson, J.; Österlind, F.; Durvy, N.T.M. The Contiki Os: The Operating System for the Internet of Things. 2011. Available online: http://www.contikios.org (accessed on 20 November 2018).
- Osterlind, F.; Dunkels, A.; Eriksson, J.; Finne, N.; Voigt, T. Cross-level sensor network simulation with cooja. In Proceedings of the 2006 31st IEEE Conference on Local Computer Networks, Tampa, FL, USA, 14–16 November 2006; pp. 641–648. [Google Scholar]
- Polastre, J.; Szewczyk, R.; Culler, D. Telos: Enabling ultra-low power wireless research. In Proceedings of the Fourth International Symposium on Information Processing in Sensor Networks, Boise, ID, USA, 15 April 2005; pp. 364–369. [Google Scholar]
- Daneels, G.; Municio, E.; Van de Velde, B.; Ergeerts, G.; Weyn, M.; Latré, S.; Famaey, J. Accurate Energy Consumption Modeling of IEEE 802.15. 4e TSCH Using Dual-Band OpenMote Hardware. Sensors 2018, 18, 437. [Google Scholar] [CrossRef] [PubMed]
- Davoli, L.; Veltri, L.; Ventre, P.L.; Siracusano, G.; Salsano, S. Traffic engineering with segment routing: SDN-based architectural design and open source implementation. In Proceedings of the 2015 Fourth European Workshop on the Software Defined Networks (EWSDN), Bilbao, Spain, 30 September–2 October 2015; pp. 111–112. [Google Scholar]
- Kim, T.; Nguyen-Duc, T. OQR: On-demand QoS Routing without Traffic Engineering in Software Defined Networks. In Proceedings of the 2018 4th IEEE Conference on Network Softwarization and Workshops (NetSoft), Montreal, QC, Canada, 25–29 June 2018; pp. 362–365. [Google Scholar]
- Long, N.T.; Uwase, M.P.; Tiberghien, J.; Steenhaut, K. QoS-aware cross-layer mechanism for multiple instances RPL. In Proceedings of the 2013 International Conference on Advanced Technologies for Communications (ATC), Ho Chi Minh City, Vietnam, 16–18 October 2013; pp. 44–49. [Google Scholar]
- Van der Stok, P.; Greevenbosch, B. CoAp Management Interfaces (Draft-Vanderstok-Core-Comi-04). IETF, 2014. Available online: https://datatracker. ietf. org/doc/draft-vanderstok-core-comi (accessed on 20 November 2018).
- Rao, S.; Chendanda, D.; Deshpande, C.; Lakkundi, V. Implementing LWM2M in constrained IoT devices. In Proceedings of the 2015 IEEE Conference on Wireless Sensors (ICWiSe), Melaka, Malaysia, 24–26 August 2015; pp. 52–57. [Google Scholar]
- Berde, P.; Gerola, M.; Hart, J.; Higuchi, Y.; Kobayashi, M.; Koide, T.; Lantz, B.; O’Connor, B.; Radoslavov, P.; Snow, W.; et al. ONOS: Towards an open, distributed SDN OS. In Proceedings of the Third Workshop on Hot Topics in Software Defined Networking, Chicago, IL, USA, 22 August 2014; pp. 1–6. [Google Scholar]
- Anadiotis, A.C.G.; Galluccio, L.; Milardo, S.; Morabito, G.; Palazzo, S. Towards a software-defined Network Operating System for the IoT. In Proceedings of the 2015 IEEE 2nd World Forum on Internet of Things (WF-IoT), Milan, Italy, 14–16 December 2015; pp. 579–584. [Google Scholar]
- Akyildiz, I.F.; Lee, A.; Wang, P.; Luo, M.; Chou, W. A roadmap for traffic engineering in SDN-OpenFlow networks. Comput. Netw. 2014, 71, 1–30. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 1 | Send remote DIO from node R in unicast to remote node X with rank RANK |
| 2 | Send propagating DIO from node R in unicast to local node X with rank RANK |
| 3 | Send supplanting DIO from node W in unicast to node X supplanting Y with rank RANK |
| 4 | Send propagating DIO from node W in unicast to node X with rank RANK |
| 5 | Send 6P ADD Req from node R/W to node X supplanting Y with seqNum SQ |
| 6 | Send 6P DEL Req from node R/W to node X supplanting Y with seqNum SQ |
| Name | Description | Rule | Push | Polling |
|---|---|---|---|---|
| Energy | Minimize traffic in a node that has a low battery level | if Battery < T r | x | x |
| Temp. (CPU) | Minimize traffic in a node that has high CPU temperature | if Temp. C > T | x | x |
| Queue (Memory) | Minimize traffic in a node that has high queue usage level | if avgQueue > T | x | x |
| Load Balancing | Maximize fairness of the routed traffic between the nodes | if loadNode1 > T + loadNode2 | x | |
| Deny of Service | Minimize effects of a DoS attack | if pkt/s > T | x | x |
| Reliability | Maximize end-to-end reliability | if e2eETXpath1 > T + e2eETXpath | x | |
| Latency | Minimize end-to-end latency | if delay(path1) > T + delay(path2) | x | |
| P2P traffic | Minimize hop count between two nodes | if p2p-path1 ∃ | x | x |
| Mobility | Minimize packet loss in a parent switch | if RSSI-neigh1 > T + RSSI-neigh2 | x | |
| Link PDR | Maximize PDR in a given link between two nodes | if cellPDR < T | x |
| Network Blueprint | Policies | Building Blocks |
|---|---|---|
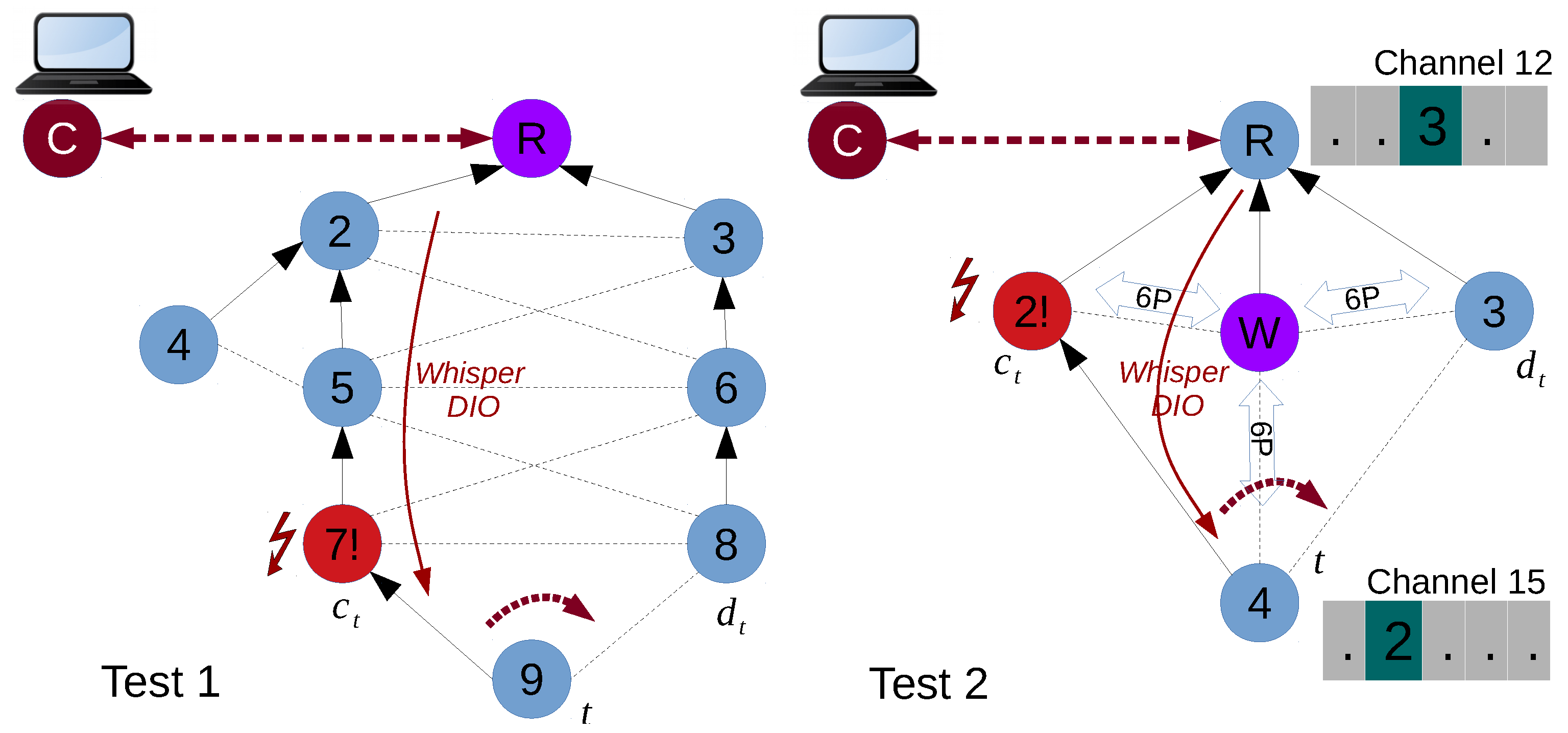
| Test 1 | Energy, Load balancing | Switch parent |
| Test 2 | Energy, Latency and Reliability | Allocate cell, Switch parent, Deallocate cell |
| Output Test 1 | Primitive 1: Send DIO from node R to remote node 9 with RANK 2559 | |
| Output Test 2 | Primitive 5: Send 6P ADD Req from W to node 3 supplanting 4 with SeqNum 0 | |
| Primitive 5: Send 6P ADD Req from W to node 4 supplanting 3 with SeqNum 0 | ||
| Primitive 3: Send DIO from node from W to node 4 supplanting 2 with RANK 2559 | ||
| Primitive 6: Send 6P DEL Req from W to node 4 supplanting 2 with SeqNum 1 | ||
| Primitive 6: Send 6P DEL Req from W to node 2 supplanting 4 with SeqNum 1 | ||
| Network Size (# nodes) | 10 | 25 | 50 | 75 | 100 | 125 | 150 | 175 | 200 |
| Avg # Hops | 1.75 | 2.18 | 2.43 | 2.63 | 2.77 | 2.87 | 2.91 | 3.02 | 3.11 |
| Avg # Neigh per node | 3.58 | 5.55 | 7.65 | 8.99 | 10.13 | 10.63 | 11.73 | 12.34 | 12.88 |
| Without W nodes (%) | 93.6 | 83.9 | 75.0 | 65.4 | 61.2 | 57.7 | 54.0 | 52.1 | 50.1 |
| Primitives per Switch | 1.55 | 2.26 | 2.88 | 3.14 | 3.43 | 3.46 | 3.72 | 3.84 | 3.85 |
| Primitive 1 (%) | 73.4 | 53.1 | 42.3 | 39.1 | 35.8 | 35.2 | 33.2 | 31.9 | 32.13 |
| Primitive 2 (%) | 26.6 | 46.9 | 57.7 | 60.9 | 64.2 | 64.8 | 66.8 | 68.1 | 67.86 |
| Computation Time (s) | 6.7 | 36.0 | 114.2 | 230.6 | 396.6 | 552.9 | 802.4 | 1044.24 | 1446.2 |
| Network Size (# nodes) | 10 | 25 | 50 | 75 | 100 | 125 | 150 | 175 | 200 |
| Avg # Hops | 1.29 | 1.48 | 1.64 | 1.72 | 1.78 | 1.84 | 1.89 | 1.92 | 1.96 |
| Avg # Neigh per node | 6.34 | 11.58 | 16.84 | 21.27 | 24.39 | 26.93 | 29.49 | 31.18 | 33.51. |
| Without W nodes (%) | 95.0 | 88.6 | 81.8 | 77.4 | 74.1 | 71.0 | 68.4 | 66.7 | 64.2 |
| Primitives per Switch | 2.88 | 4.86 | 6.51 | 7.70 | 8.50 | 9.04 | 9.4 | 10.06 | 10.27 |
| Primitive 1 (%) | 40.5 | 25.0 | 19.2 | 16.5 | 15.1 | 14.1 | 13.4 | 12.74 | 12.5 |
| Primitive 2 (%) | 59.5 | 75.0 | 80.8 | 83.5 | 84.9 | 85.9 | 86.6 | 87.2 | 87.5 |
| Computation Time (s) | 20.5 | 81.3 | 230.8 | 449.9 | 720.1 | 1025.6 | 1356.8 | 1729.2 | 2159.8 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Municio, E.; Marquez-Barja, J.; Latré, S.; Vissicchio, S. Whisper: Programmable and Flexible Control on Industrial IoT Networks. Sensors 2018, 18, 4048. https://doi.org/10.3390/s18114048
Municio E, Marquez-Barja J, Latré S, Vissicchio S. Whisper: Programmable and Flexible Control on Industrial IoT Networks. Sensors. 2018; 18(11):4048. https://doi.org/10.3390/s18114048
Chicago/Turabian StyleMunicio, Esteban, Johann Marquez-Barja, Steven Latré, and Stefano Vissicchio. 2018. "Whisper: Programmable and Flexible Control on Industrial IoT Networks" Sensors 18, no. 11: 4048. https://doi.org/10.3390/s18114048
APA StyleMunicio, E., Marquez-Barja, J., Latré, S., & Vissicchio, S. (2018). Whisper: Programmable and Flexible Control on Industrial IoT Networks. Sensors, 18(11), 4048. https://doi.org/10.3390/s18114048