Energy-Balanced Multisensory Scheduling for Target Tracking in Wireless Sensor Networks

Abstract
1. Introduction
- We propose a novel and distributed multiple sensors scheduling approach. The other existing works did not involve the sensed modules scheduling for one sensor node with multiple sensors, and they regarded the nodes and sensed modules as a whole to manage the sleep scheduling. This work considers not only the scheduling management of communication modules, but also the sleep scheduling of each sensed module in one node based on their power consumption and sensing performance. Thus, both the nodes and their sensed modules can be efficiently scheduled.
- This paper proposes an adaptive sleep time allocation scheme to maximize the sleep time of each CM, and each CH can adaptively arrange the sleep time of its members according to the distance between the member and the cluster border. Moreover, the collaboration is established among CHs in our coordinated scheme.
- This paper proposes an energy balanced parameter to balance the energy consumption of each node and proposes a target state uncertainty factor to guarantee the tracking performance. Furthermore, each node receives the transferred factors from its CH to estimate the probability of its sensed modules entering active mode in the next time step. Consequently, EBMS can achieve energy consumption balance for each sensor node.
- A multi-hop coordination scheme among CHs is proposed to find the optimal cooperation among CHs and maximize the energy conservation. Moreover, an optimal sleep scheduling for the nodes and their modules is obtained by the multi-hop cluster coordination. As a result, the nodes and sensed modules can be woken up in time to avoid missing a target when the target moves dynamically and randomly.
2. Related Work
3. The System Models
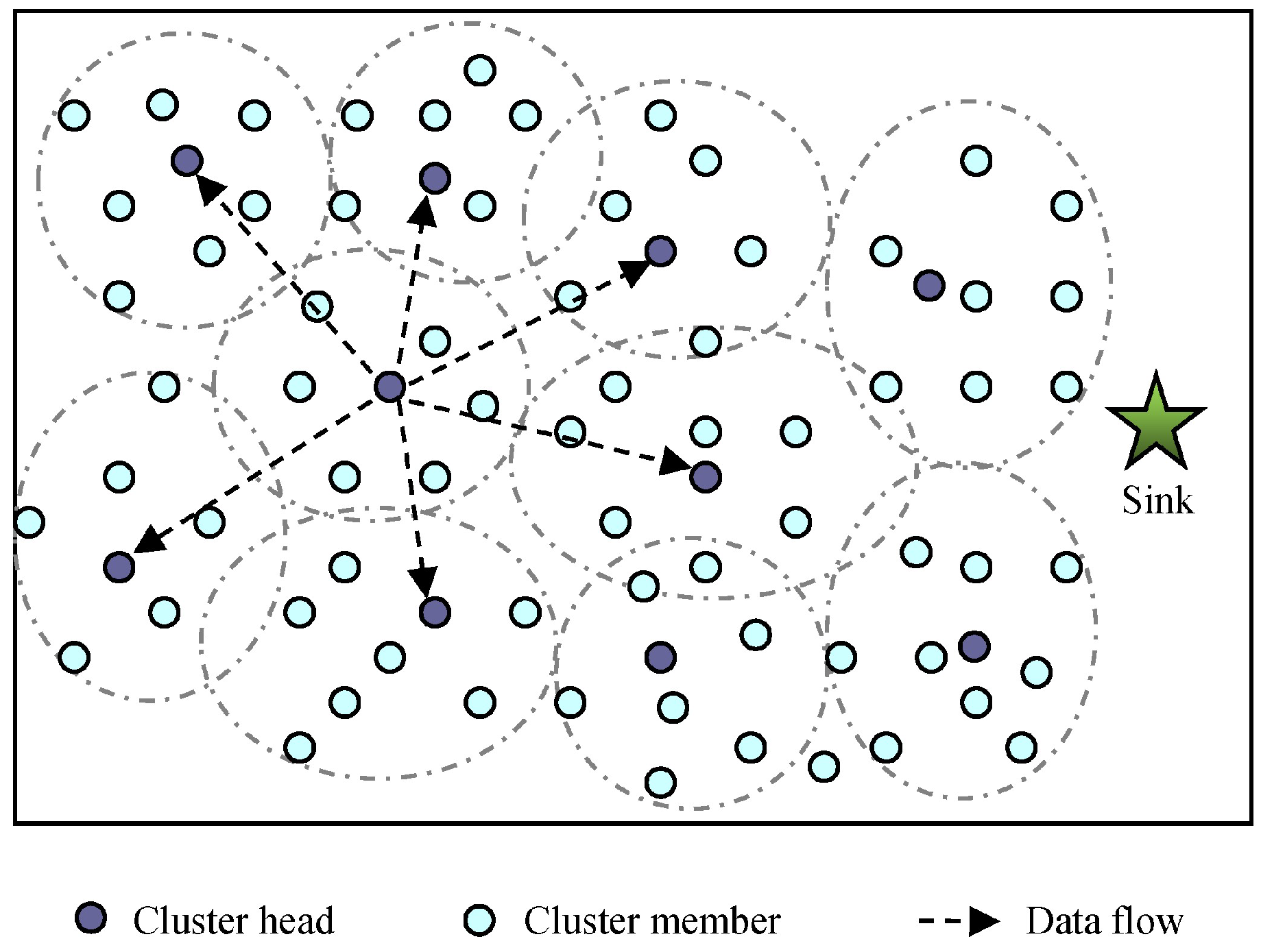
3.1. Network Model
3.2. Sensing Model
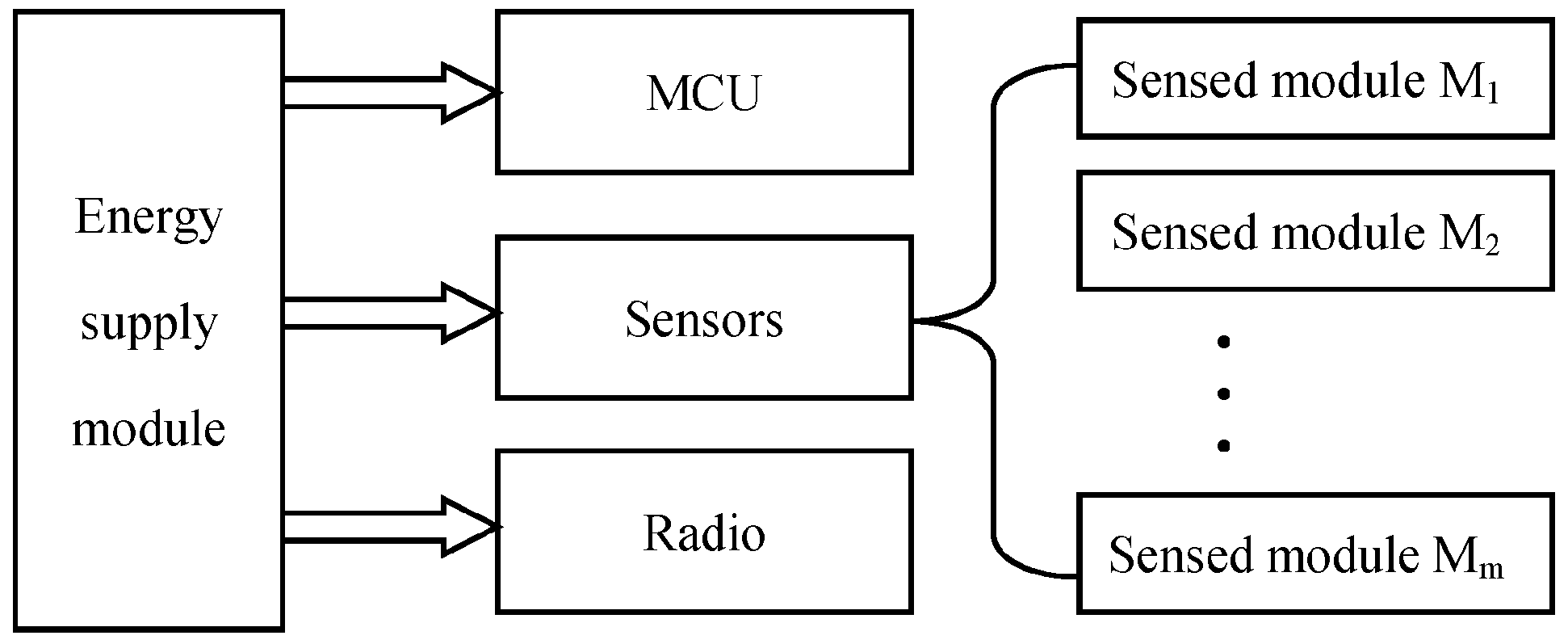
3.3. Sensor Node Model
3.4. Energy Consumption Model
4. Energy-Balanced Multisensory Scheduling Algorithm
4.1. The Network Initialization and Clustering
4.2. The Sleeping Time Calculation for Sensor Node and Its Modules
4.3. The Probability of Transferring into Active for Sensor Node and Its Modules
4.3.1. Calculations of the Transferred Factors by CH
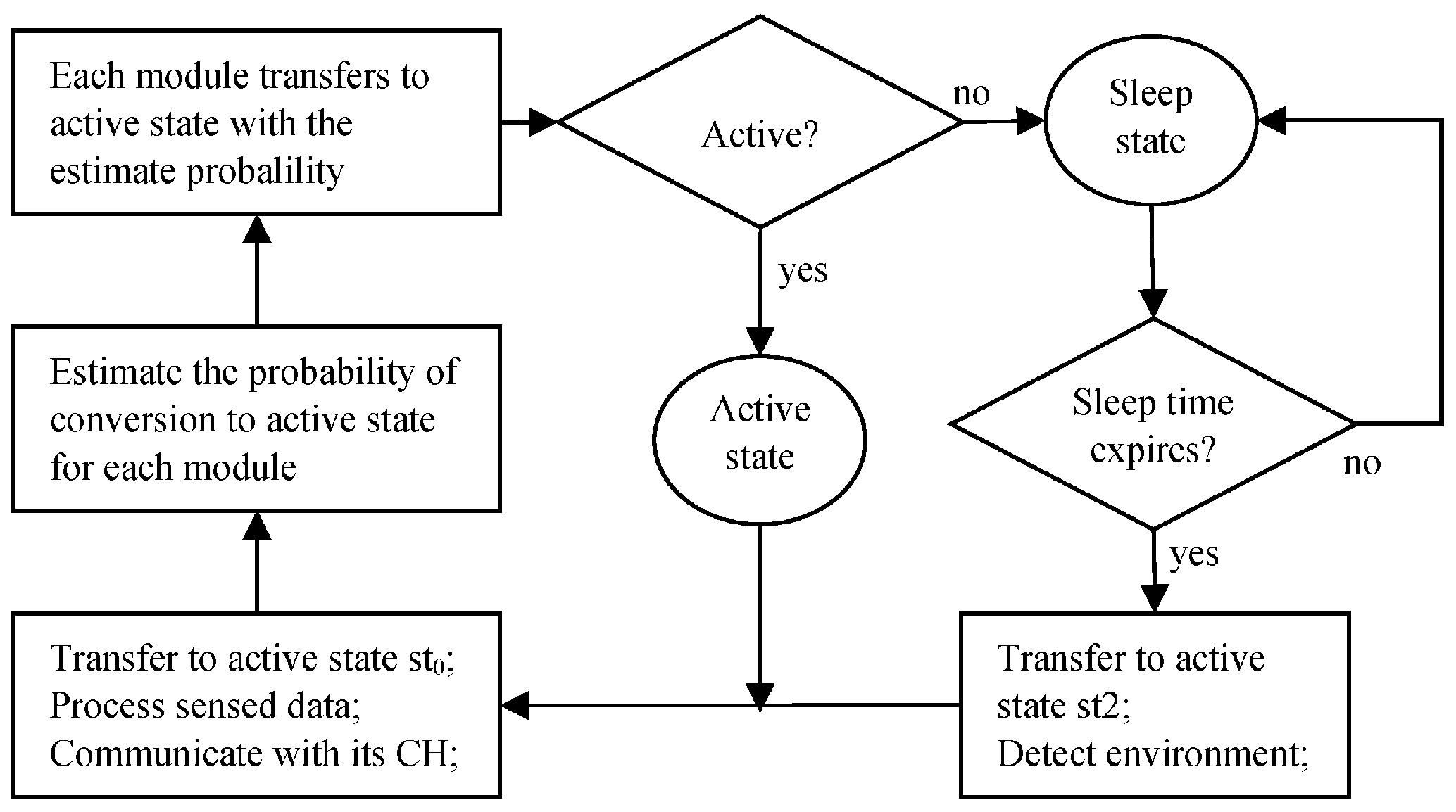
4.3.2. Sleep State Management for Sensor Node Modules by CMs
| Algorithm 1. The sleep scheduling procedure of node Ni. |
| 1. input the threshold thsu, thn |
| 2. receive sleep scheduling information from its CH |
| 3. extract ns(Ni), fsu(CHk, t), and Ebp(Mj) |
| 4. if (dr(Ni,t) = 1) |
| 5. for each module of Ni |
| 6. get into active (Ni, t + 1) |
| 7. else if ( or or ) |
| 8. for each module of Ni |
| 9. get into sleep (Ni, t + 1) |
| 10. while sleep time is expired |
| 11. get into active state st2 |
| 12. wake up (MCU and communication modules) |
| 13. else if () |
| 14. for each sensed module Mj |
| 15. calculate |
| 16. |
| 17. generate |
| 18. if () |
| 19. get into active (Mj, t + 1) |
| 20. else |
| 21. get into sleep (Mj, t + 1) |
| 22. end for |

4.4. The Discussion on Multi-Hop Collaboration of CHs
5. Experimental Results and Analysis
5.1. Experiment Environment
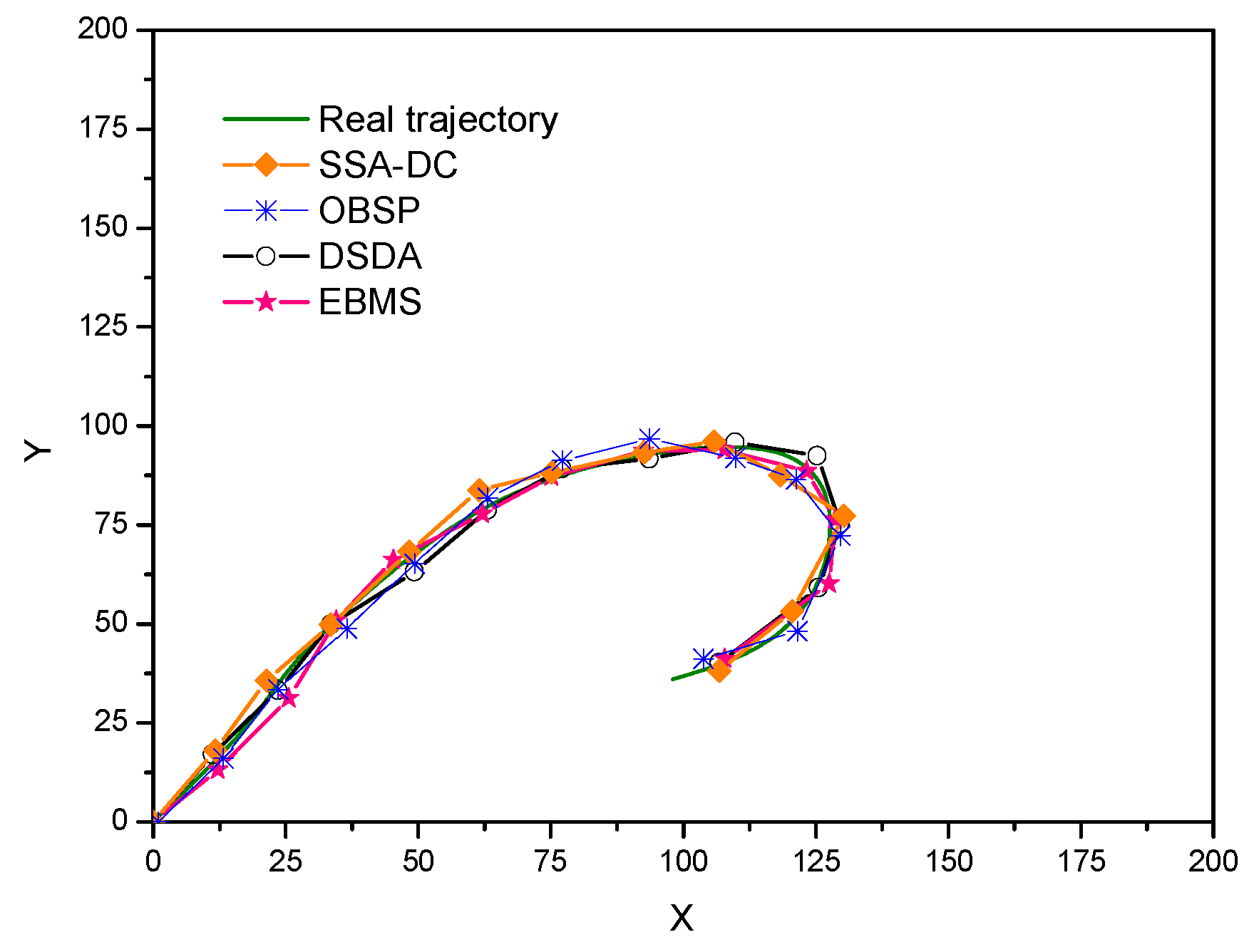
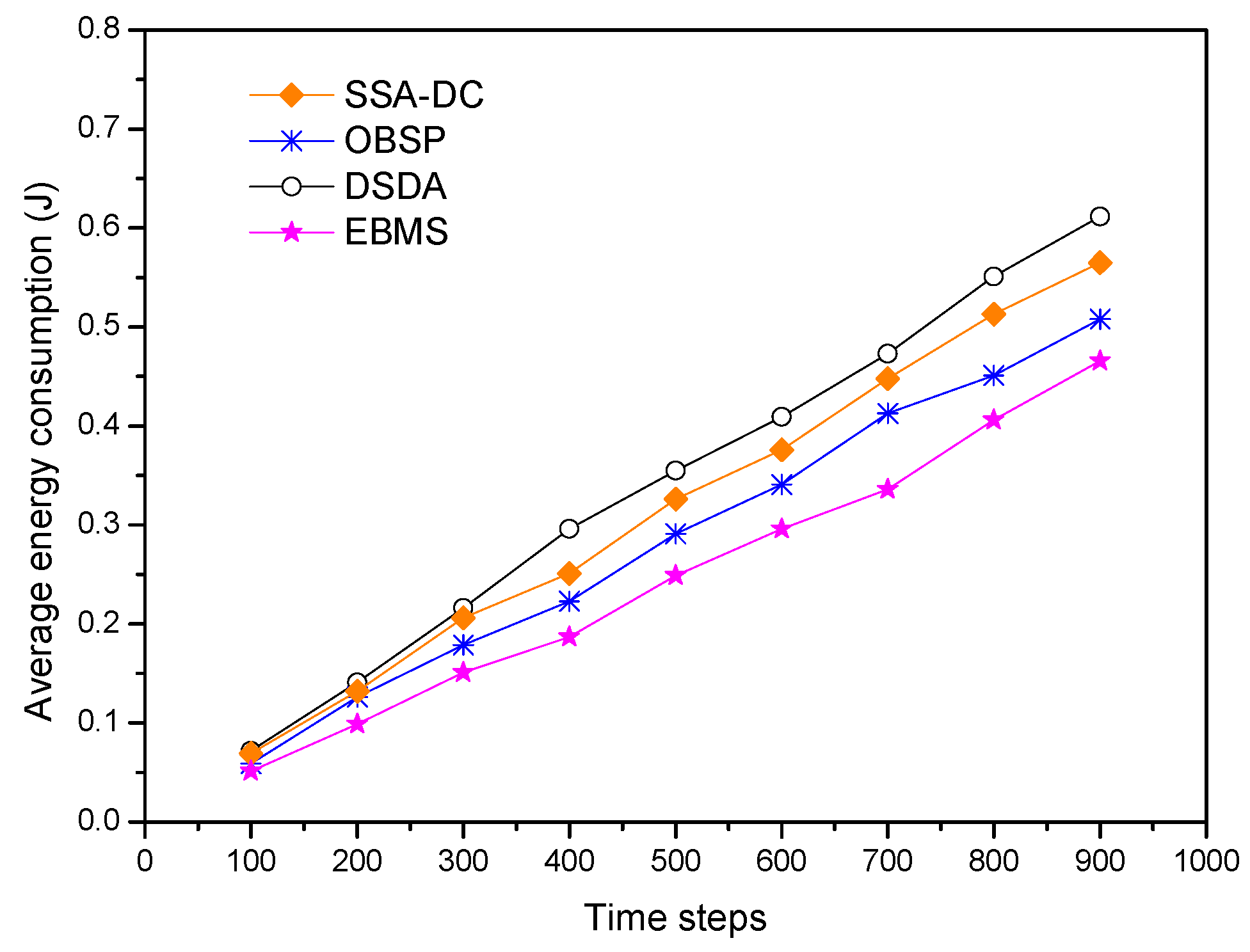
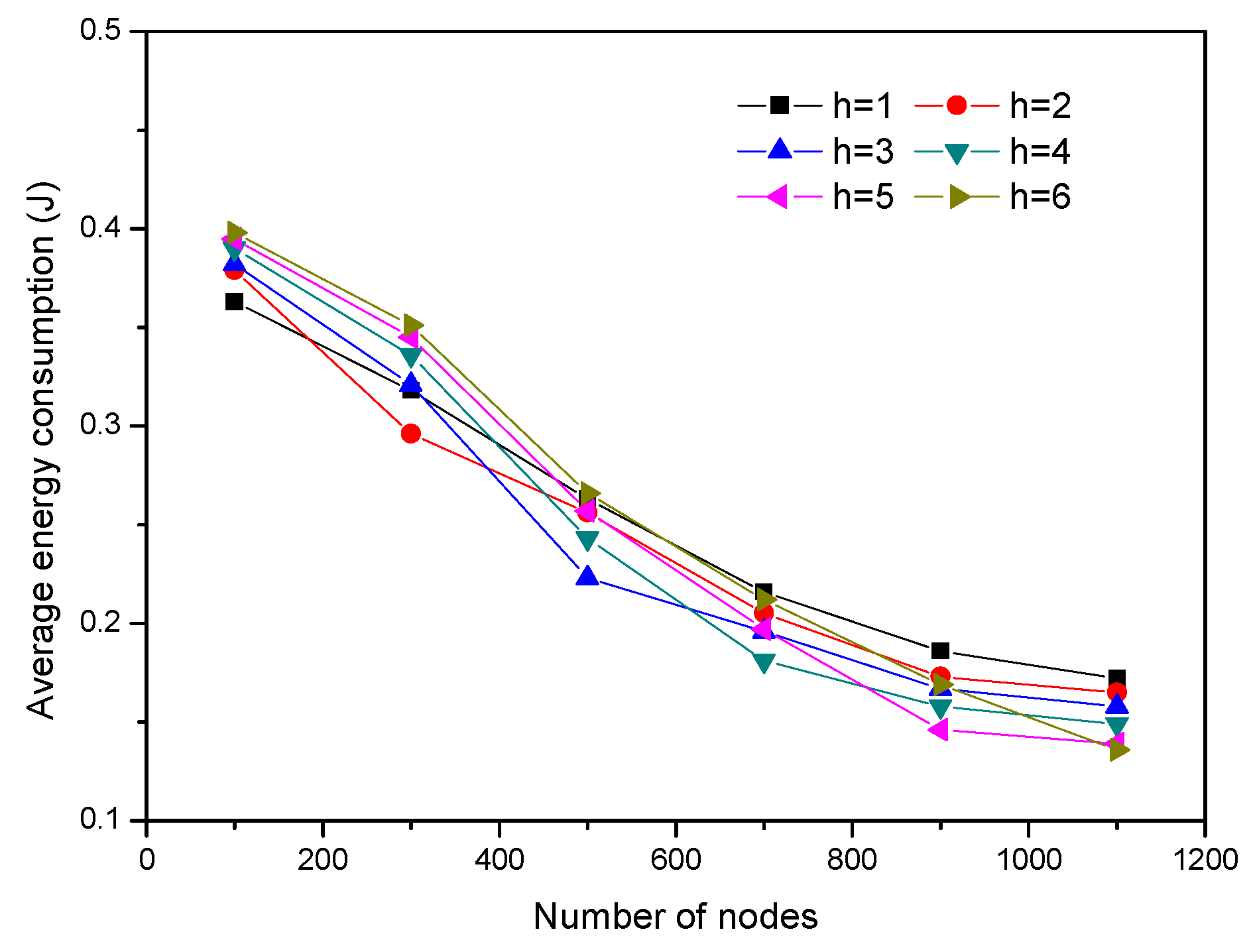
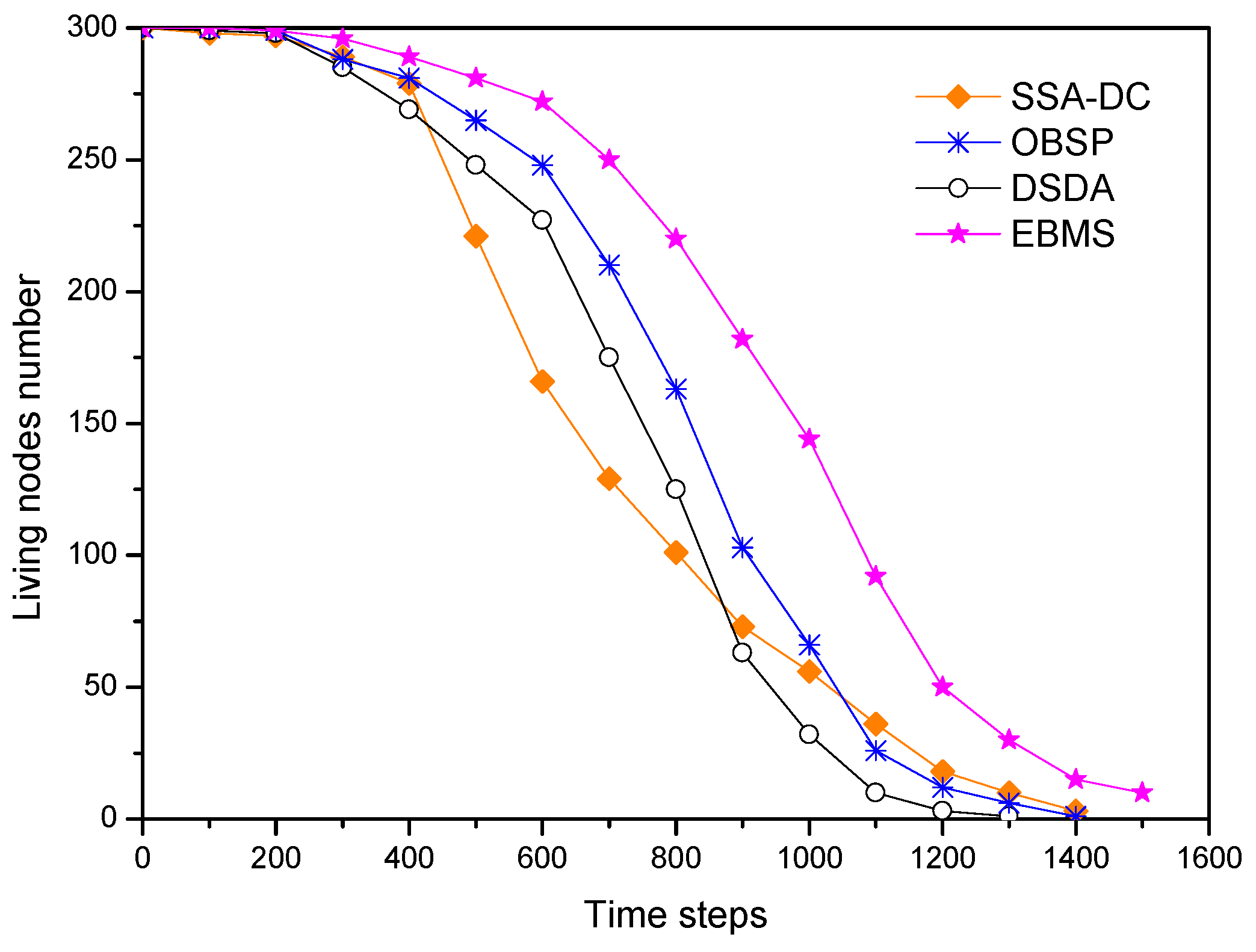
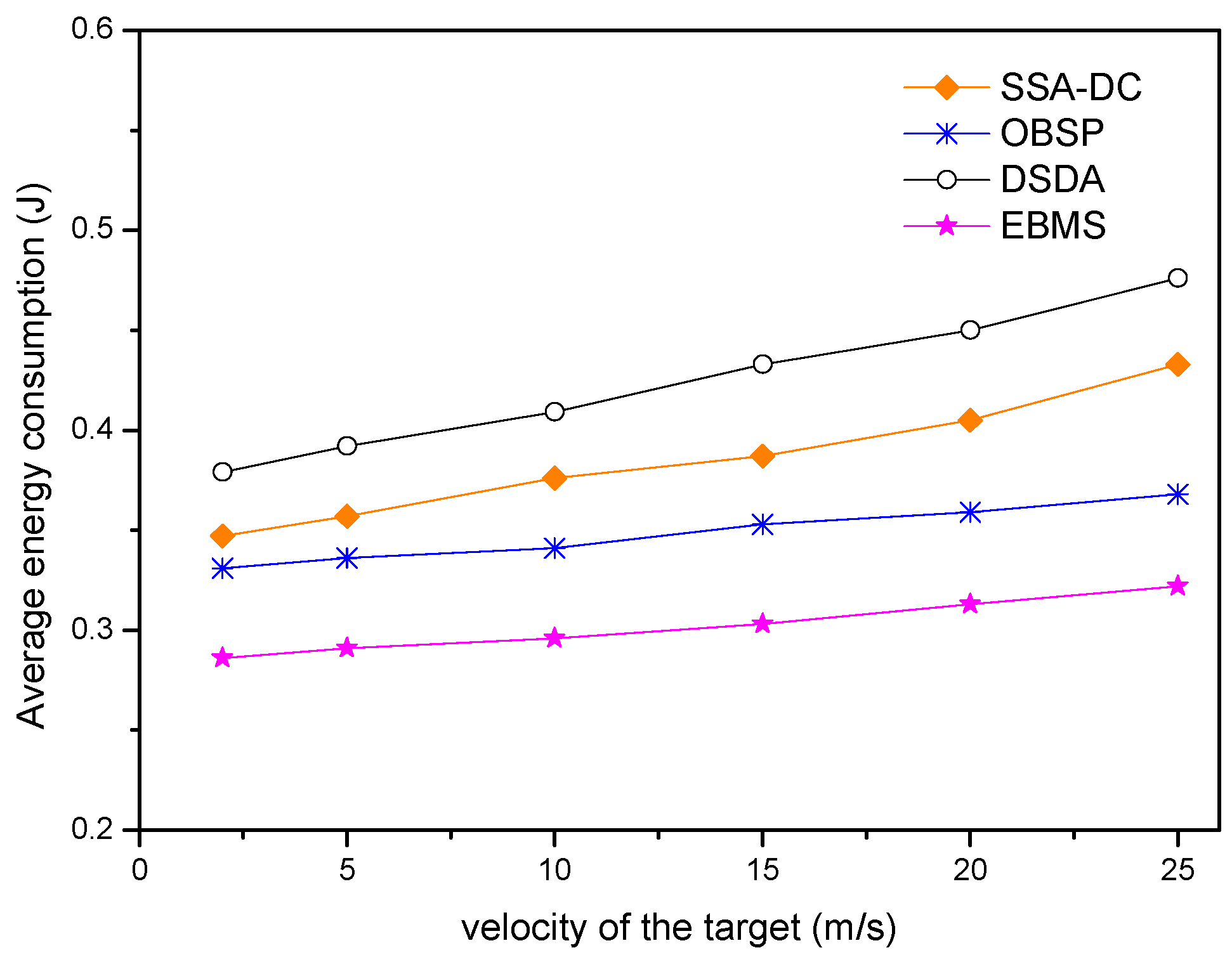
5.2. Simulation Results
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Zhang, Z.; Shu, L.; Zhu, C.; Mukherjee, M. A Short Review on Sleep Scheduling Mechanism in Wireless Sensor Networks. In Proceedings of the 13th EAI International Conference on Heterogeneous Networking for Quality, Reliability, Security and Robustness, Dalian, China, 15–17 December 2017. [Google Scholar]
- Raza, M.; Aslam, N.; Le-Minh, H.; Hussain, S.; Cao, Y.; Khan, N.M. A Critical Analysis of Research Potential, Challenges and Future Directives in Industrial Wireless Sensor Networks. IEEE Commun. Surv. Tutor. 2018, 20, 39–95. [Google Scholar] [CrossRef]
- Dargie, W. Dynamic Power Management in Wireless Sensor Networks: State-of-the-Art. IEEE Sens. J. 2012, 12, 1518–1528. [Google Scholar] [CrossRef]
- Yu, T.; Akhtar, A.M.; Shami, A.; Wang, X. Energy-Efficient Scheduling Mechanism for Indoor Wireless Sensor Networks. In Proceedings of the IEEE Vehicular Technology Conference, Glasgow, UK, 11–14 May 2015; pp. 1–6. [Google Scholar]
- Cheng, H.; Su, Z.; Lloret, J.; Chen, G. Service-Oriented Node Scheduling Scheme for Wireless Sensor Networks Using Markov Random Field Model. Sensors 2014, 14, 20940–20962. [Google Scholar] [CrossRef] [PubMed]
- Zamora, N.; Kao, J.; Marculescu, R. Distributed power management techniques for wireless network video systems. In Proceedings of the Design Automation and Test in Europe (DATE’07), Nice Acropolis, France, 16–20 April 2007; pp. 1–6. [Google Scholar]
- Zhang, B.; Tong, E.; Hao, J.; Niu, W.; Li, G. Energy Efficient Sleep Schedule with Service Coverage Guarantee in Wireless Sensor Networks. J. Netw. Syst. Manag. 2016, 24, 834–858. [Google Scholar] [CrossRef]
- Tynan, R.; Muldoon, C.; O’Hare, G.; O’Grady, M. Coordinated Intelligent Power Management and the Heterogeneous Sensing Coverage Problem. Comput. J. 2011, 54, 490–502. [Google Scholar] [CrossRef]
- Jamshed, M.A.; Nauman, A.; Khan, M.F.; Khan, M.I. An energy efficient scheduling mechanism using concept of light weight processors for Wireless Multimedia Sensor Networks. In Proceedings of the IEEE International Bhurban Conference on Applied Sciences and Technology, Islamabad, Pakistan, 14–18 January 2017; pp. 792–794. [Google Scholar]
- Kumar, S. On k−coverage in a mostly sleeping sensor network. Wirel. Netw. 2008, 14, 277–294. [Google Scholar] [CrossRef]
- More, A.; Wagh, S. Energy efficient coverage using optimized node scheduling in wireless sensor networks. In Proceedings of the IEEE International Conference on Next Generation Computing Technologies, Dehradun, India, 14–16 October 2016; pp. 291–295. [Google Scholar]
- Sang, H.L.; Kim, H.; Choi, L. Sleep Control Game for Wireless Sensor Networks. Mob. Inf. Syst. 2016, 2016, 3085408. [Google Scholar]
- Cheng, P.; Zhang, F.; Chen, J.; Sun, Y.; Shen, X. A Distributed TDMA Scheduling Algorithm for Target Tracking in Ultrasonic Sensor Networks. IEEE Trans. Ind. Electron. 2013, 60, 3836–3845. [Google Scholar] [CrossRef]
- Wang, X.; Ma, J.J.; Wang, S.; Bi, D.W. Prediction-based Dynamic Energy Management in Wireless Sensor Networks. Sensors 2007, 7, 251–266. [Google Scholar] [CrossRef]
- Jiang, B.; Ravindran, B.; Cho, H. Probability-Based Prediction and Sleep Scheduling for Energy-Efficient Target Tracking in Sensor Networks. IEEE Trans. Mob. Comput. 2013, 12, 735–747. [Google Scholar] [CrossRef]
- Hare, J.Z.; Gupta, S.; Wettergren, T.A. POSE: Prediction-Based Opportunistic Sensing for Energy Efficiency in Sensor Networks Using Distributed Supervisors. IEEE Trans. Cybern. 2018, 48, 2114–2127. [Google Scholar] [CrossRef] [PubMed]
- Schizas, D. Distributed informative-sensor identification via sparsity-aware matrix decomposition. IEEE Trans. Signal Process. 2013, 61, 4610–4624. [Google Scholar] [CrossRef]
- Chepuriand, S.; Leus, G. Sparsity-promoting sensor selection for nonlinear measurement models. IEEE Trans. Signal Process. 2015, 63, 684–698. [Google Scholar] [CrossRef]
- Guo, J.; Yuan, X.; Han, C. Sensor selection based on maximum entropy fuzzy clustering for target tracking in large-scale sensor networks. IET Signal Process. 2017, 11, 613–621. [Google Scholar] [CrossRef]
- Hentati, A.; Driouch, E.; Frigon, J.F.; Ajib, W. Fair and Low Complexity Node Selection in Energy Harvesting Wireless Sensor Networks. IEEE Syst. 2017, PP, 1–11. [Google Scholar] [CrossRef]
- Liu, S.; Fardad, M.; Masazade, E.; Varshney, P.K. Optimal Periodic Sensor Scheduling in Networks of Dynamical Systems. IEEE Trans. Signal Process. 2014, 62, 3055–3068. [Google Scholar] [CrossRef]
- Juan, F.; Lian, B.; Zhao, H. Hierarchically Coordinated Power Management for Target Tracking in Wireless Sensor Networks. Int. J. Adv. Robot. Syst. 2013, 10, 347. [Google Scholar] [CrossRef]
- Chiasserini, C.F.; Garetto, M. An Analytical Model for Wireless Sensor Networks with Sleeping Nodes. IEEE Trans. Mob. Comput. 2006, 5, 1706–1718. [Google Scholar] [CrossRef]
- National ICT Australia—Castalia. Available online: http://castalia.npc.nicta.com.au/ (accessed on 16 May 2018).
- OMNeT++ Network simulator. Available online: http://www.omnetpp.org/ (accessed on 20 March 2018).
- IEEE 802.15.4. Available online: http://www.ieee802.org/15/pub/TG4.html (accessed on 4 April 2018).



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| States | Sensing | Processing | Memory | Radio |
|---|---|---|---|---|
| st0 | Active | Active | Active | Rx/Tx |
| st1 | Active | Idle | Sleep | Rx |
| st2 | Active | Sleep | Sleep | Sleep |
| st3 | Sleep | Sleep | Sleep | Sleep |
| Sensing | Sensed Module M1 | Sensed Module M2 | Sensed Module Mm |
|---|---|---|---|
| Active | Active | Active | Active |
| Active | Active | Sleep | |
| Active | Sleep | Sleep | |
| Sleep | Sleep | Sleep | Sleep |
| Parameters | Values |
|---|---|
| Data reporting frequency | 1 s |
| Data packet size | 128 bytes |
| Control message size | 8 bytes |
| thsu | 2 m2 |
| thn | 10 |
| Coordinate of sink | (200, 200) |
| Eelec | 50 nJ/b |
| εamp | 100 pJ/(b·m2) |
| Active time slot | 0.2 s |
| Psens of M1 | 0.1 mW |
| ea-s/es-a of M1 | 8 × 10−8 J |
| Sensing range Rsens of M1 | 15 m |
| Sight angle of M1 | 100° |
| λ1 of M1 | 98.60% |
| da1 of M1 | 97.60% |
| Psens of M2 | 3 mW |
| ea-s/es-a of M2 | 1.2 × 10−7 J |
| Sensing range Rsens of M2 | 5 m |
| Sight angle of M2 | 30° |
| λ1 of M2 | 99.30% |
| da1 of M2 | 98.10% |
| Psens of M3 | 20 mW |
| ea-s/es-a of M3 | 3.6 × 10−6 J |
| Sensing range Rsens of M3 | 8 m |
| Sight angle of M3 | 25° |
| λ1 of M3 | 99.60% |
| da1 of M3 | 98.60% |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Feng, J.; Zhao, H. Energy-Balanced Multisensory Scheduling for Target Tracking in Wireless Sensor Networks. Sensors 2018, 18, 3585. https://doi.org/10.3390/s18103585
Feng J, Zhao H. Energy-Balanced Multisensory Scheduling for Target Tracking in Wireless Sensor Networks. Sensors. 2018; 18(10):3585. https://doi.org/10.3390/s18103585
Chicago/Turabian StyleFeng, Juan, and Hongwei Zhao. 2018. "Energy-Balanced Multisensory Scheduling for Target Tracking in Wireless Sensor Networks" Sensors 18, no. 10: 3585. https://doi.org/10.3390/s18103585
APA StyleFeng, J., & Zhao, H. (2018). Energy-Balanced Multisensory Scheduling for Target Tracking in Wireless Sensor Networks. Sensors, 18(10), 3585. https://doi.org/10.3390/s18103585