A Rule-Based Reasoner for Underwater Robots Using OWL and SWRL





Abstract
1. Introduction
- Knowledge Interchange Format (KIF) [17]: It is a formal language for interchanging knowledge between disparate programs and has features like declarative semantics, logic comprehensibility, translatability, and readability. However, KIF requires massive resources to model the whole system.
- The eXtended Markup Language (XML) [18]: It is able to facilitate the representation of task-specific and domain-specific data. XML documents can generate a balanced tree of open and close tags, which contains several attribute-value pairs.
- The Resource Description Framework (RDF) [19]: It can describe any web resources and provide interoperability for exchanging machine-understandable information.
- The Ontology Interchange Language (OIL) [20]: It is a Web-based ontology language that has well-defined semantics with established reasoning properties. One of the advantages using OIL is that it offers various levels of complexity. However, an OIL-based ontology has the difficulties of model transformation. For example, it is not guaranteed that conversions between OIL and RDF can keep the completeness of the model.
- Ontology Web Language (OWL) [21]: As a computational logic-based, OWL is able to represent rich and complex knowledge and it could be exploited by computer programs. OWL is admitted by the World Wide Web Consortium (W3C).
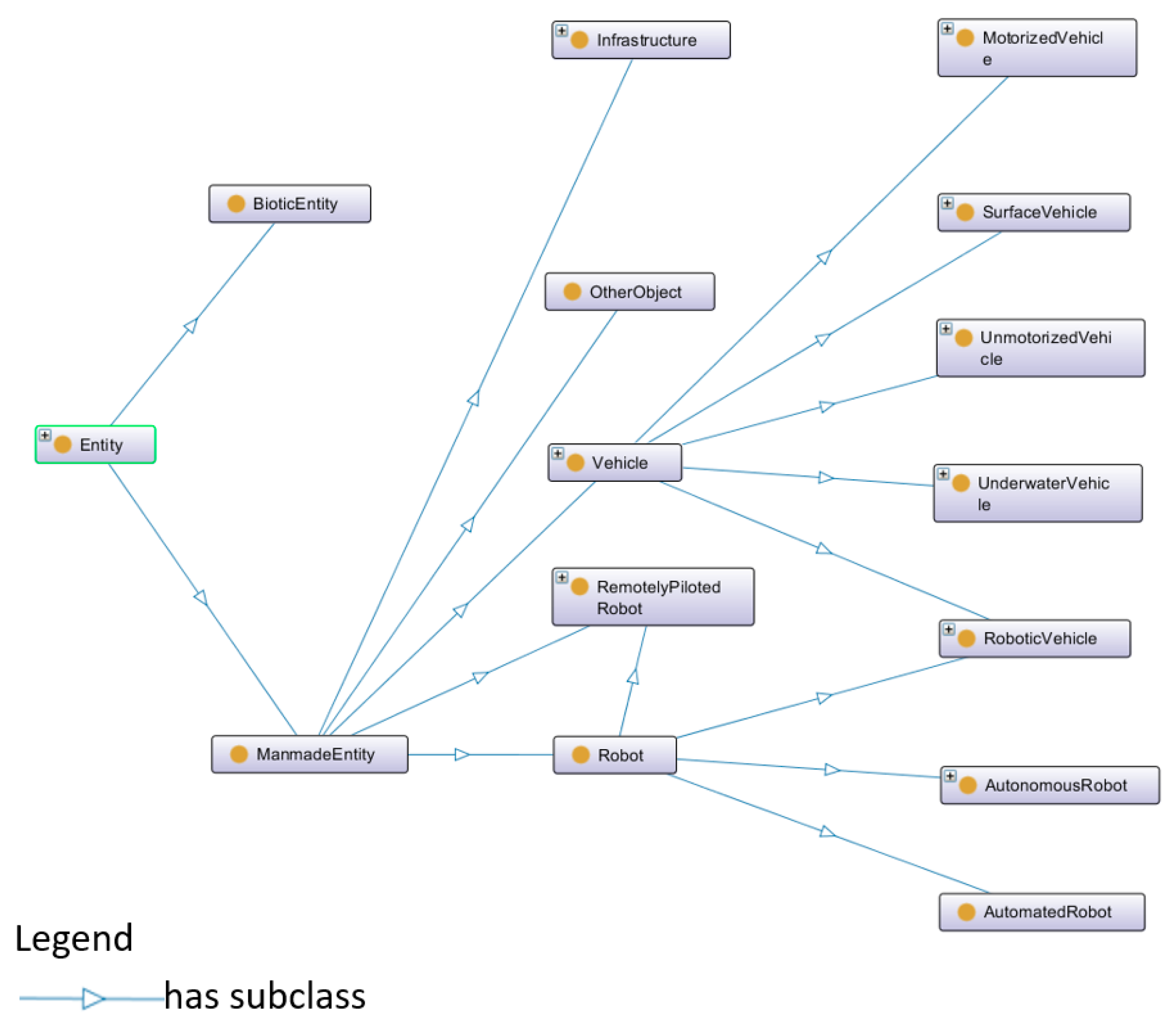
2. Ontologies for Robotic Systems
- Clarity: An ontology should represent defined terms in a clear and complete manner. The definition of terms should be independent and objective. Definitions could be formularized in logic axioms. Natural languages are recommended to comment on all the definitions.
- Coherence: An ontology should support inferences that are consistent with the definitions. If an inference result contradicts a definition, it means that the ontology is incoherent.
- Extendibility: An ontology should be able to provide the extensions on the existing definitions. An updated definition could be added directly without modifying any existing definitions.
- Modularity: An ontology should have the capability of being divided into several modules with relevant fragments of the ontology. Because a module is usually smaller than the original ontology and is easier to be re-used.
- Minimal encoding bias: The description of terms does not rely on a specific encoding approach. Because the different components of a robotic system in the real world could be programmed by various languages.
- Minimal ontological commitment: An ontology should achieve the minimal ontological commitment, which is exactly sufficient to support knowledge sharing within the ontology. The ontology developers should define as fewer constraints as possible in order to provide freedom to specialize and instantiate the ontology as needed.
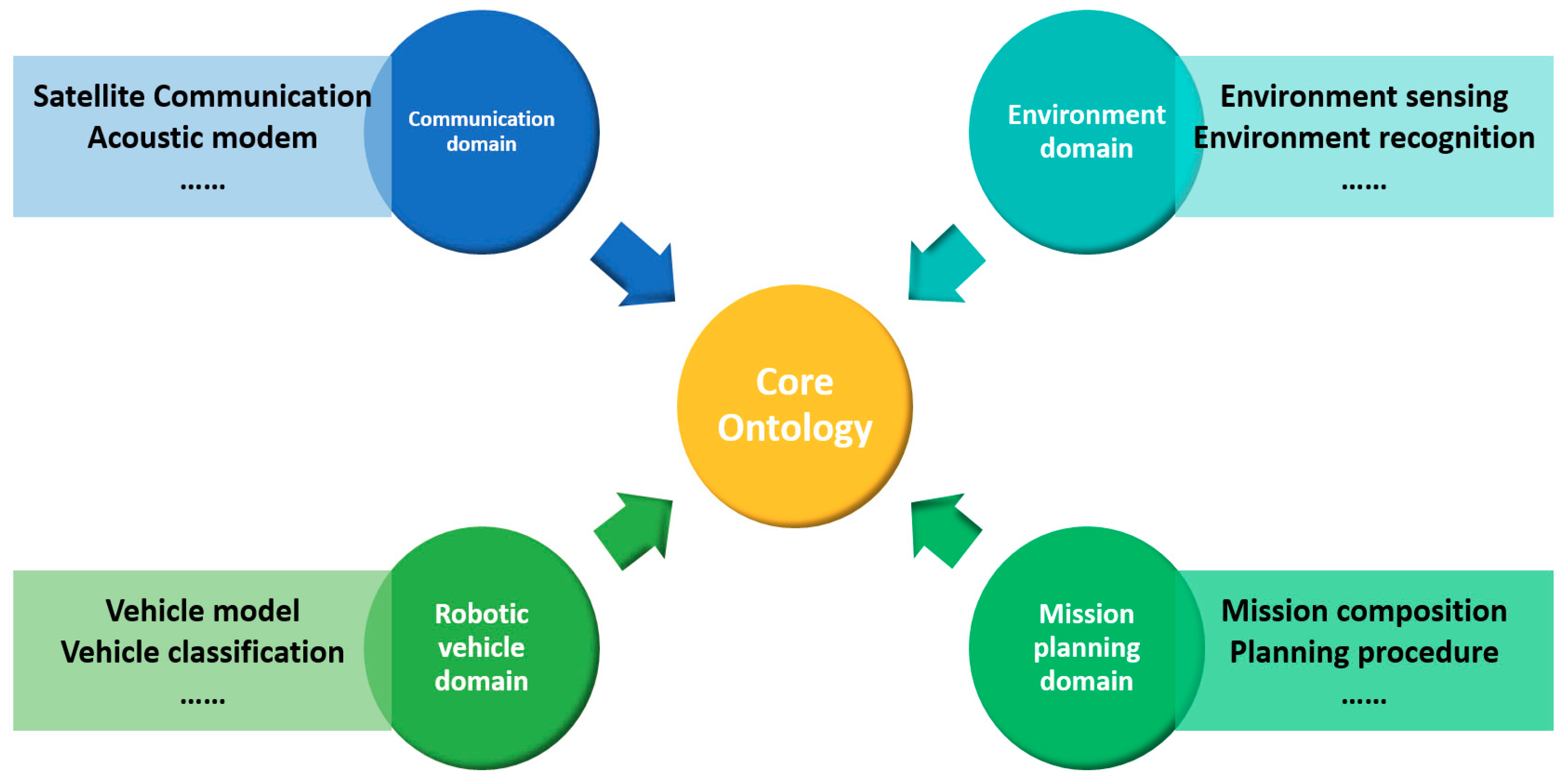
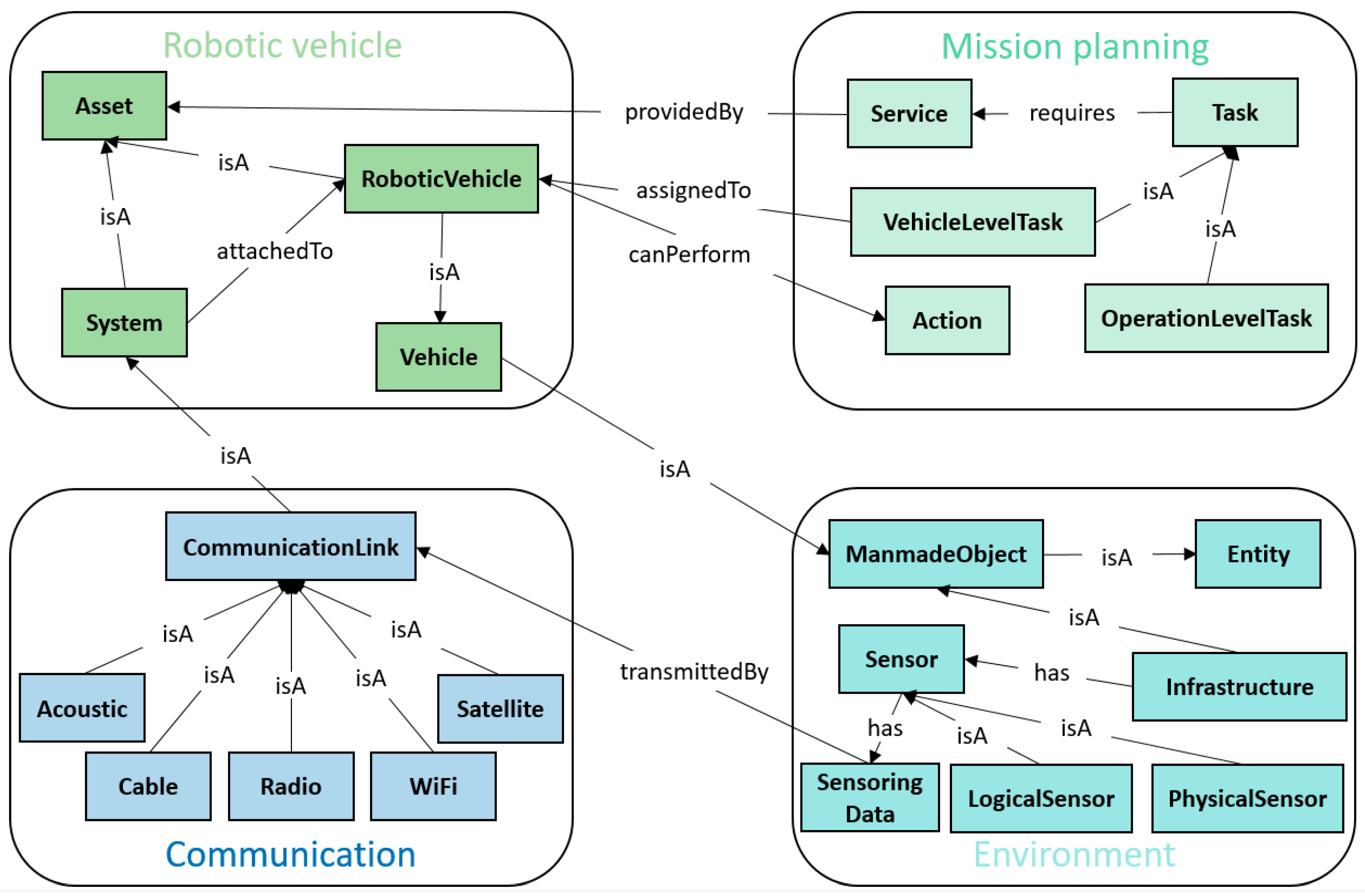
2.1. Overview of SWARMs OWL-Based Ontology
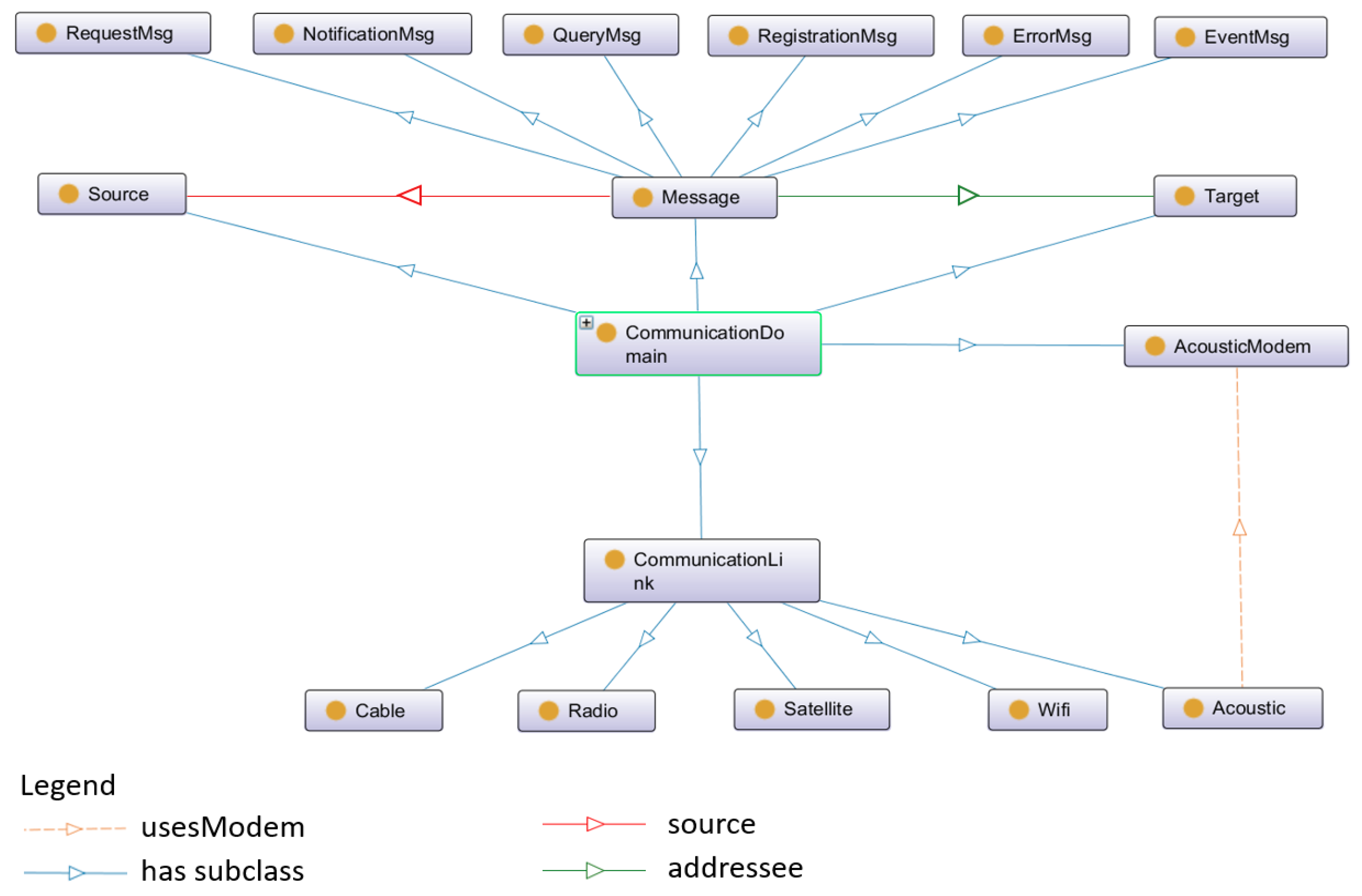
2.2. Communication Domain
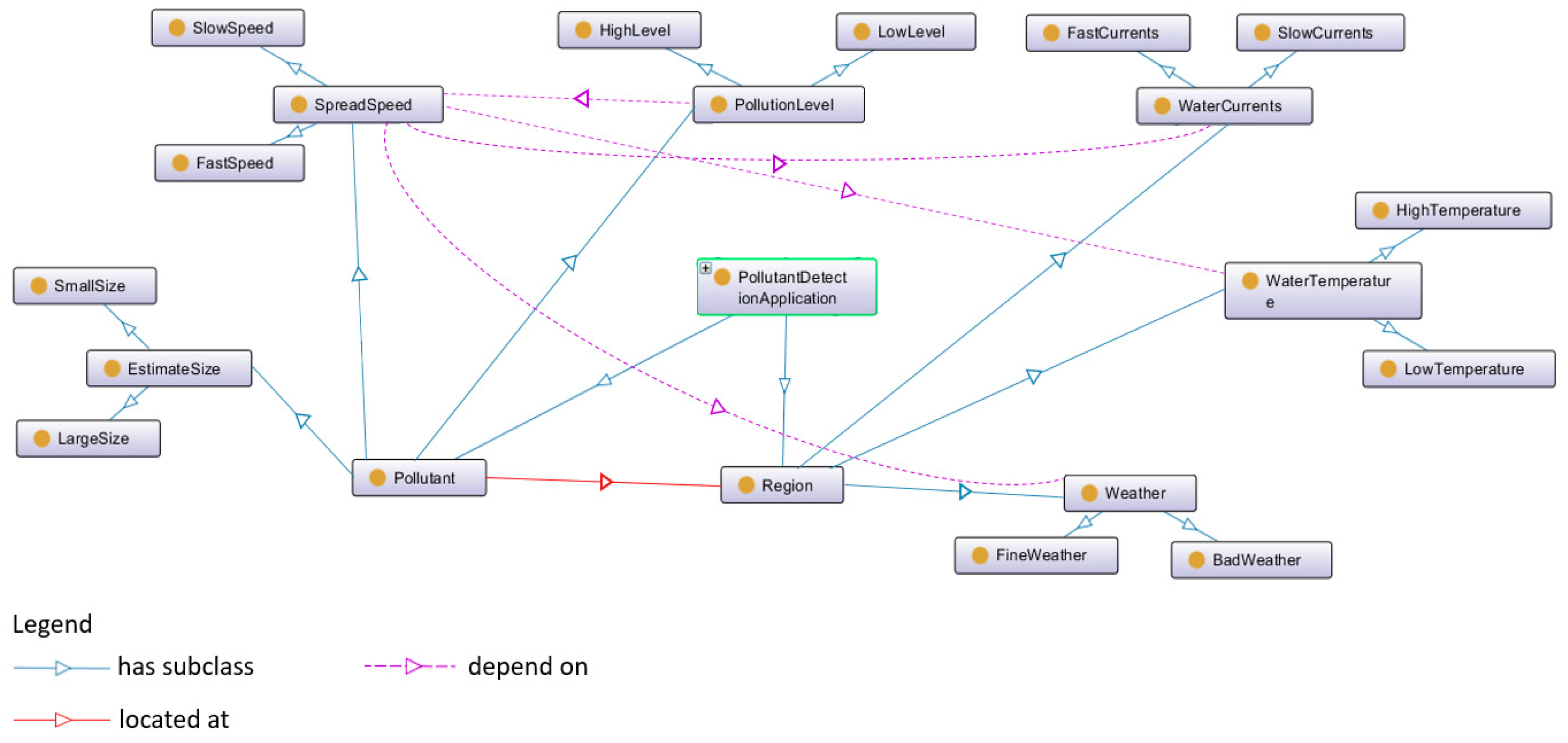
2.3. Environment Domain
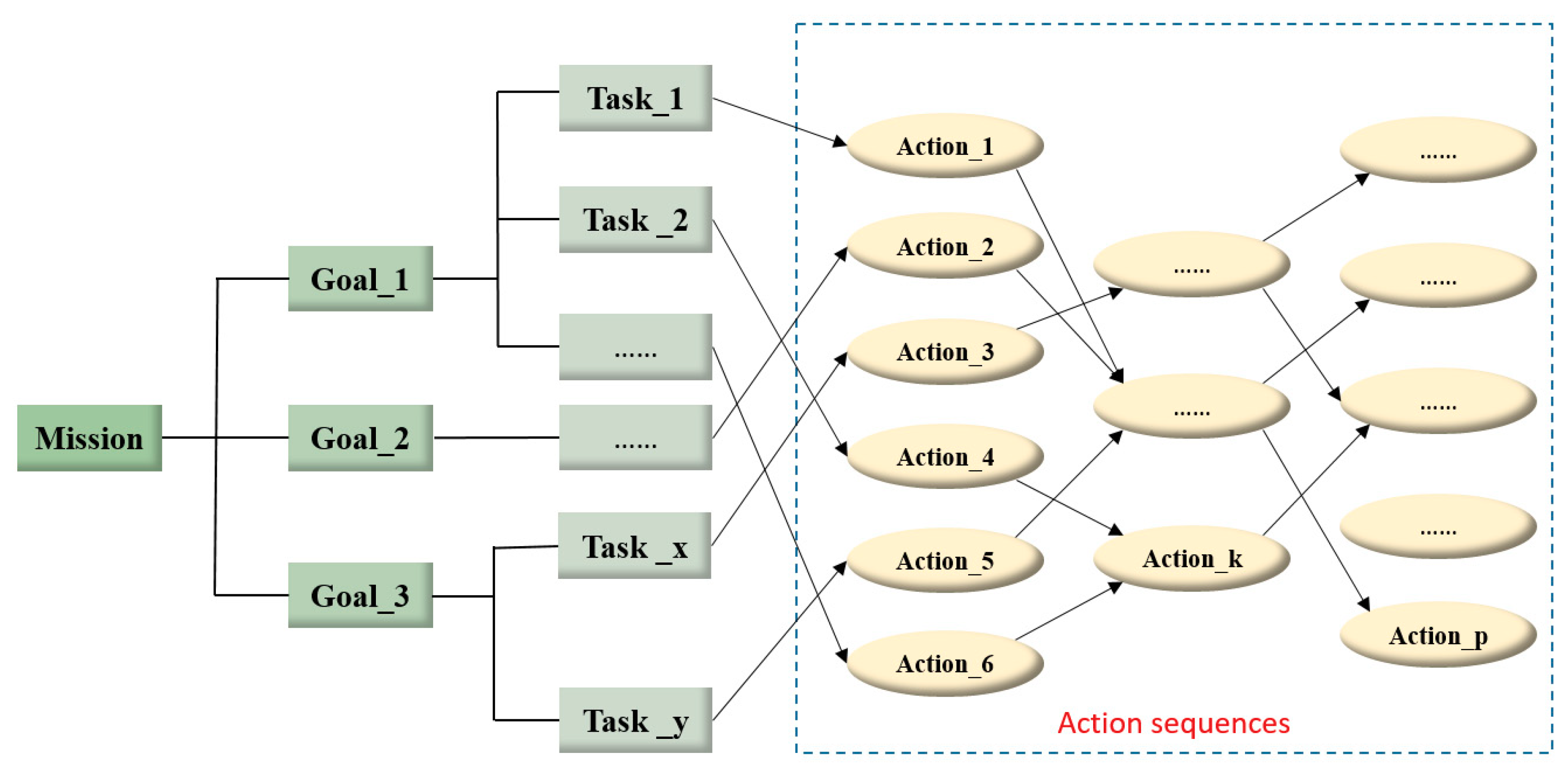
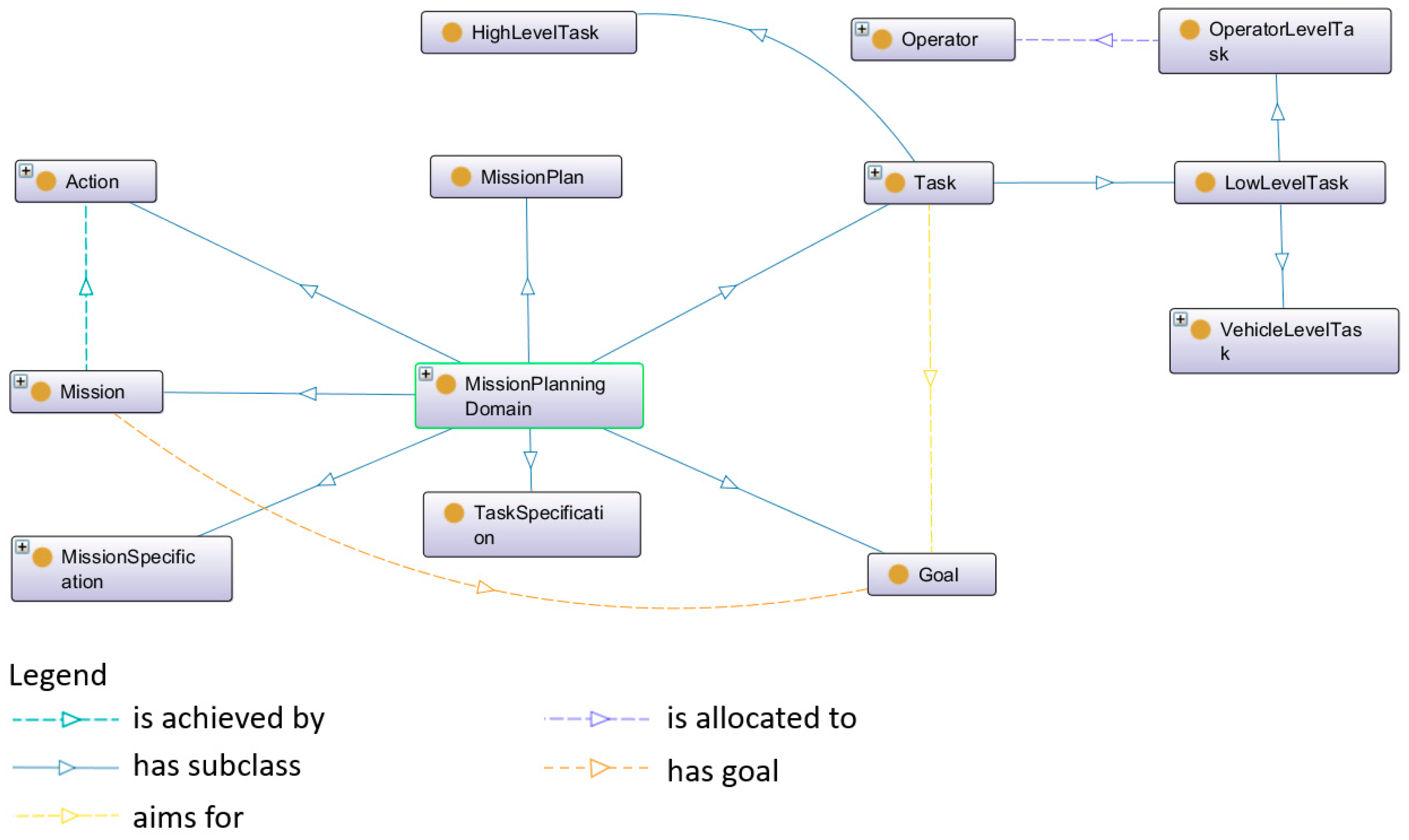
2.4. Mission Planning Domain
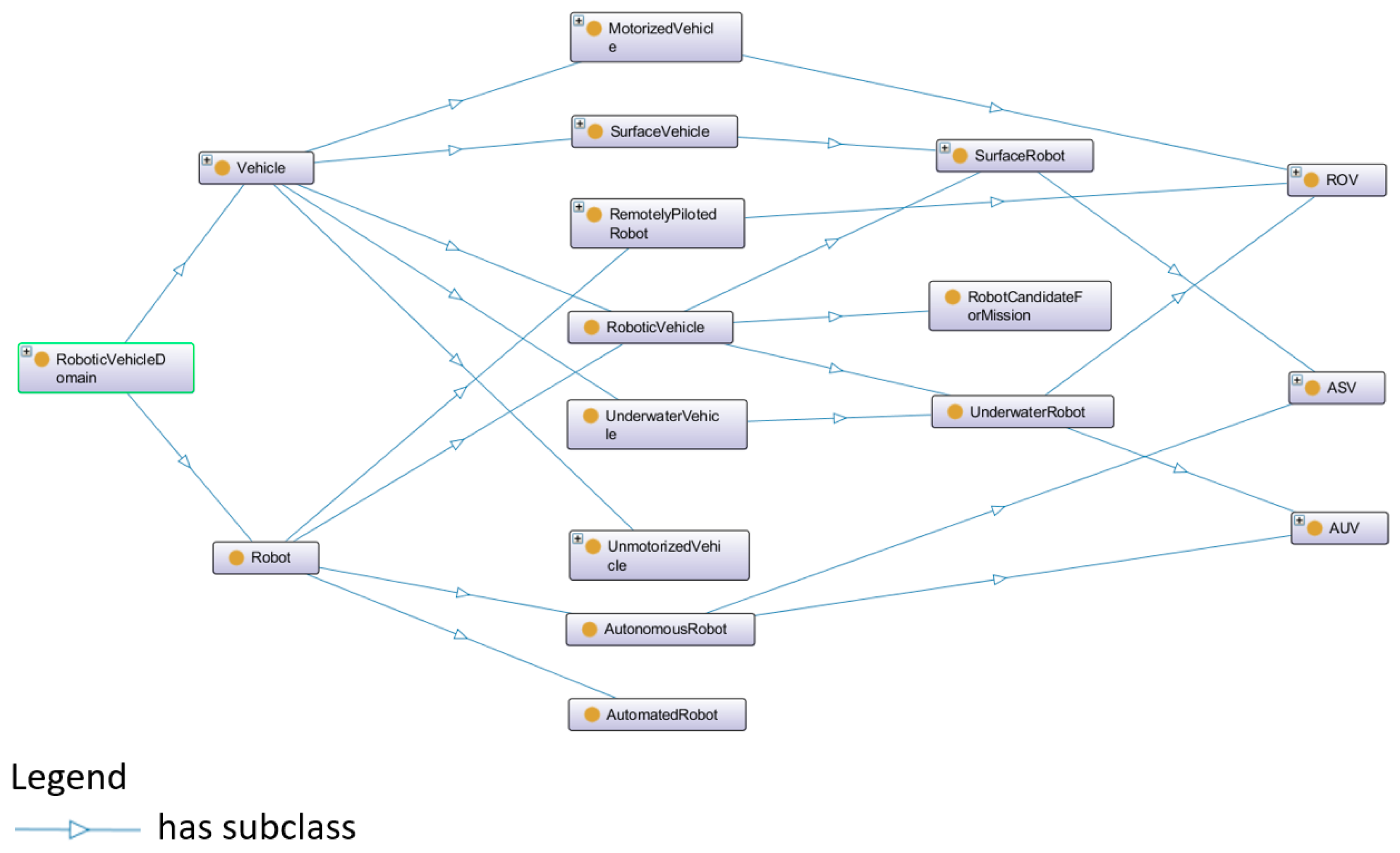
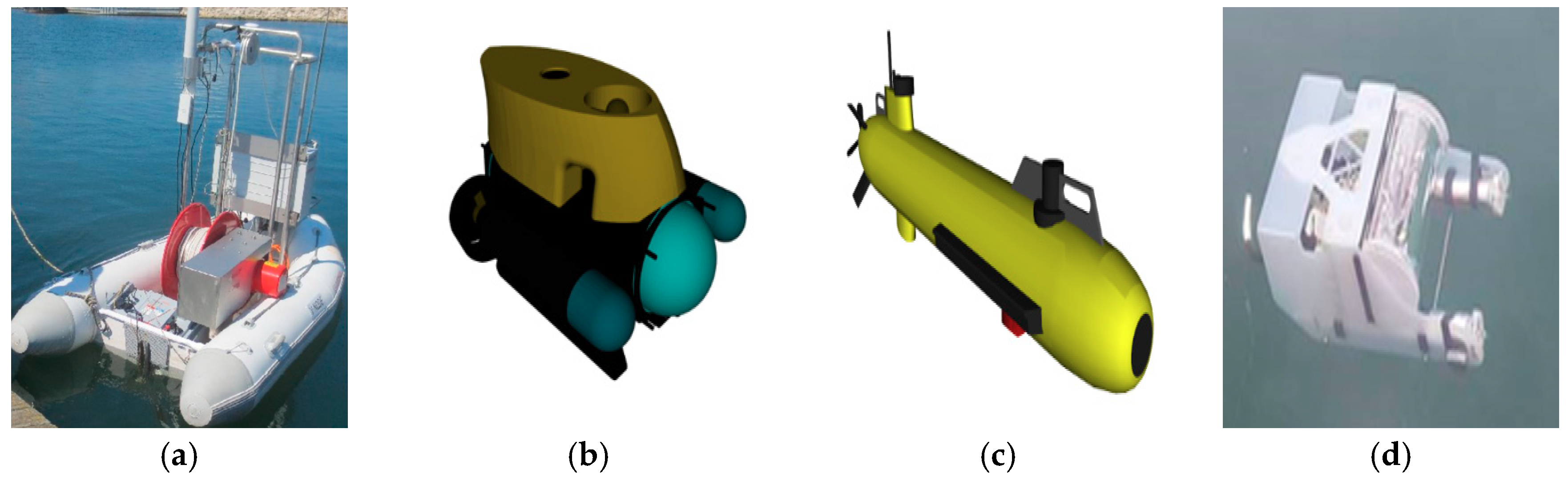
2.5. Robotic Vehicle Domain
3. SWRL Rules and Rule-Based Reasoner
3.1. SWRL Rules
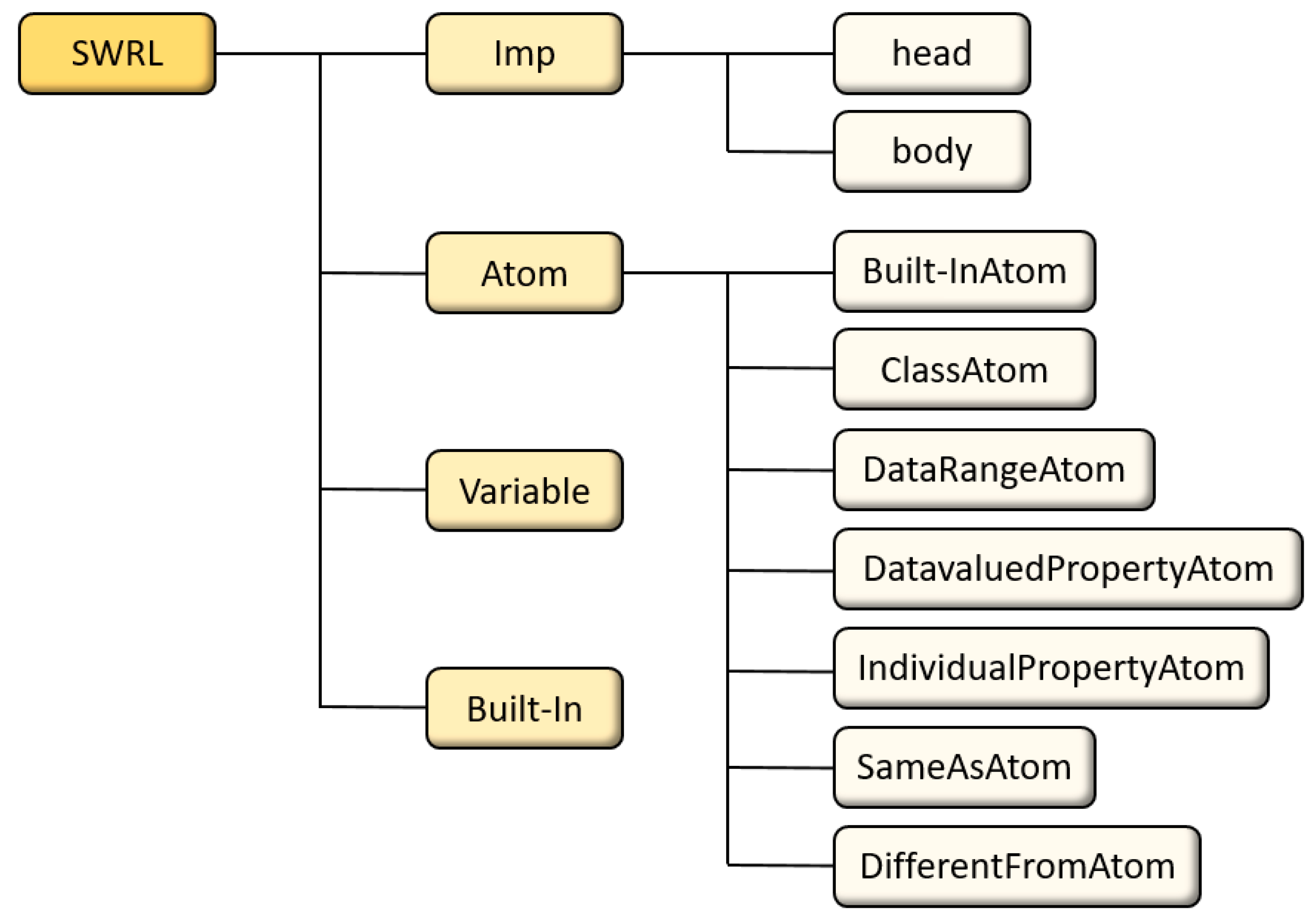
3.1.1. Structure and Syntax of SWRL Rules
- . represents an OWL description or data range.
- . is the property of OWL. and can be variables, OWL individuals or OWL data values.
- . It represents that is equal to .
- . It represents that is different from .
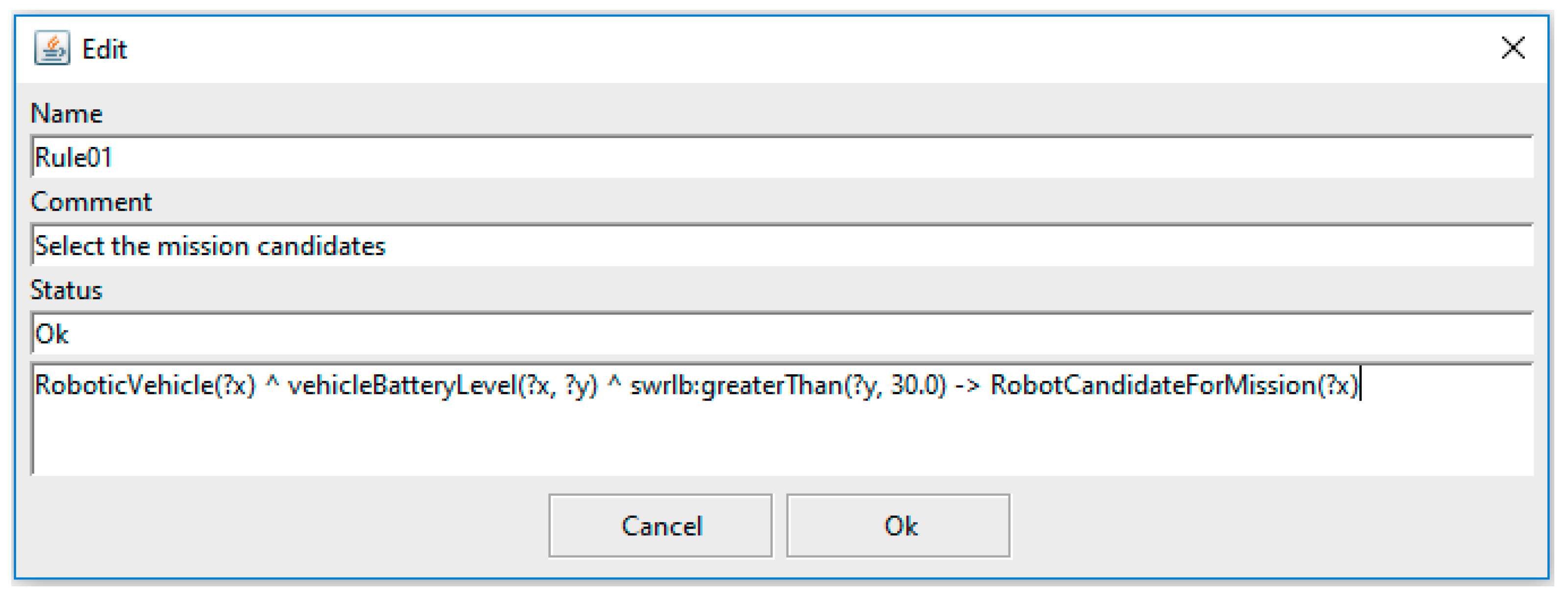
3.1.2. SWRL Rules for SWARMs Ontology
3.2. Insertion of SWRL Rules into SWARMs Ontology
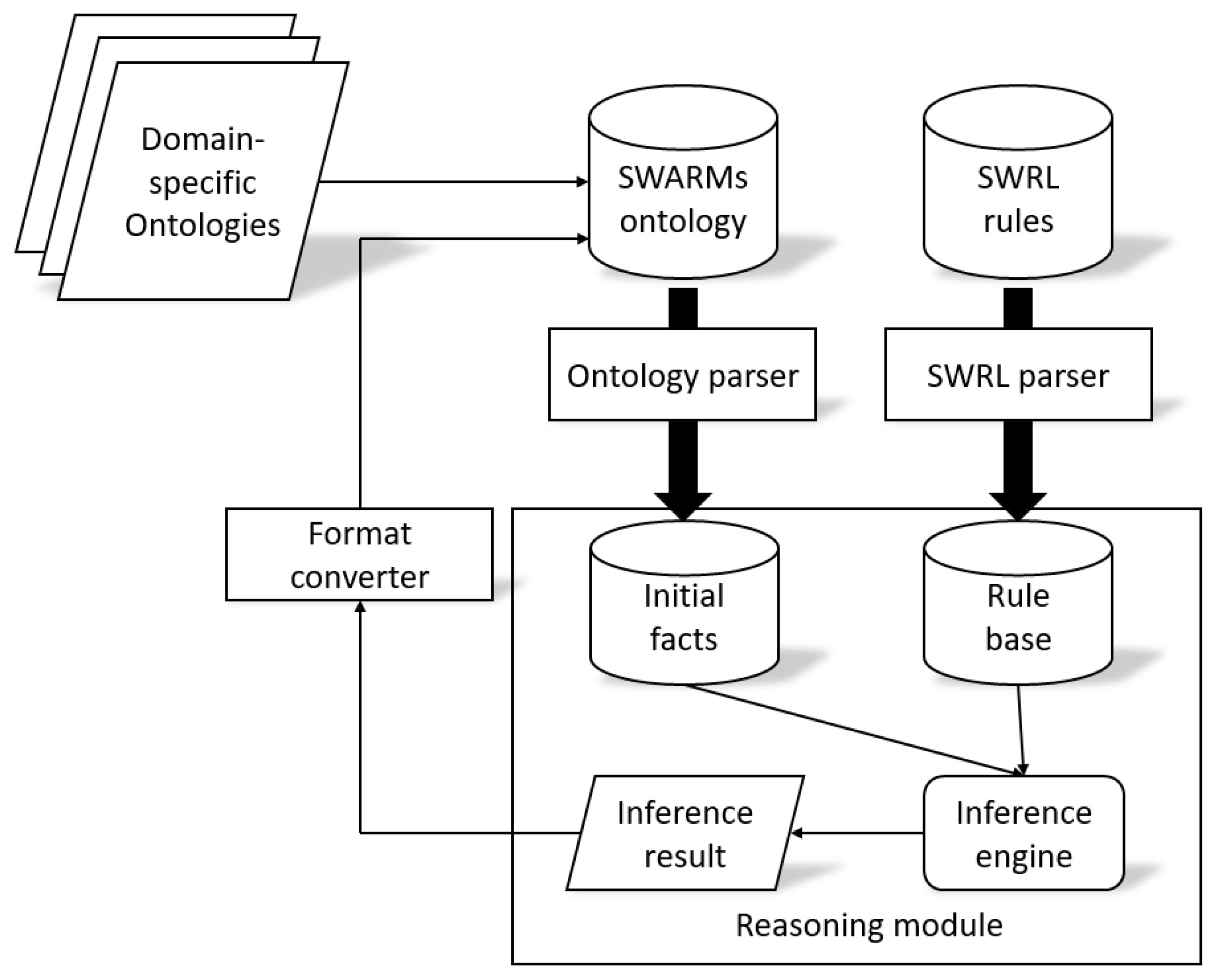
3.3. Rule-Based Reasoner for Inference
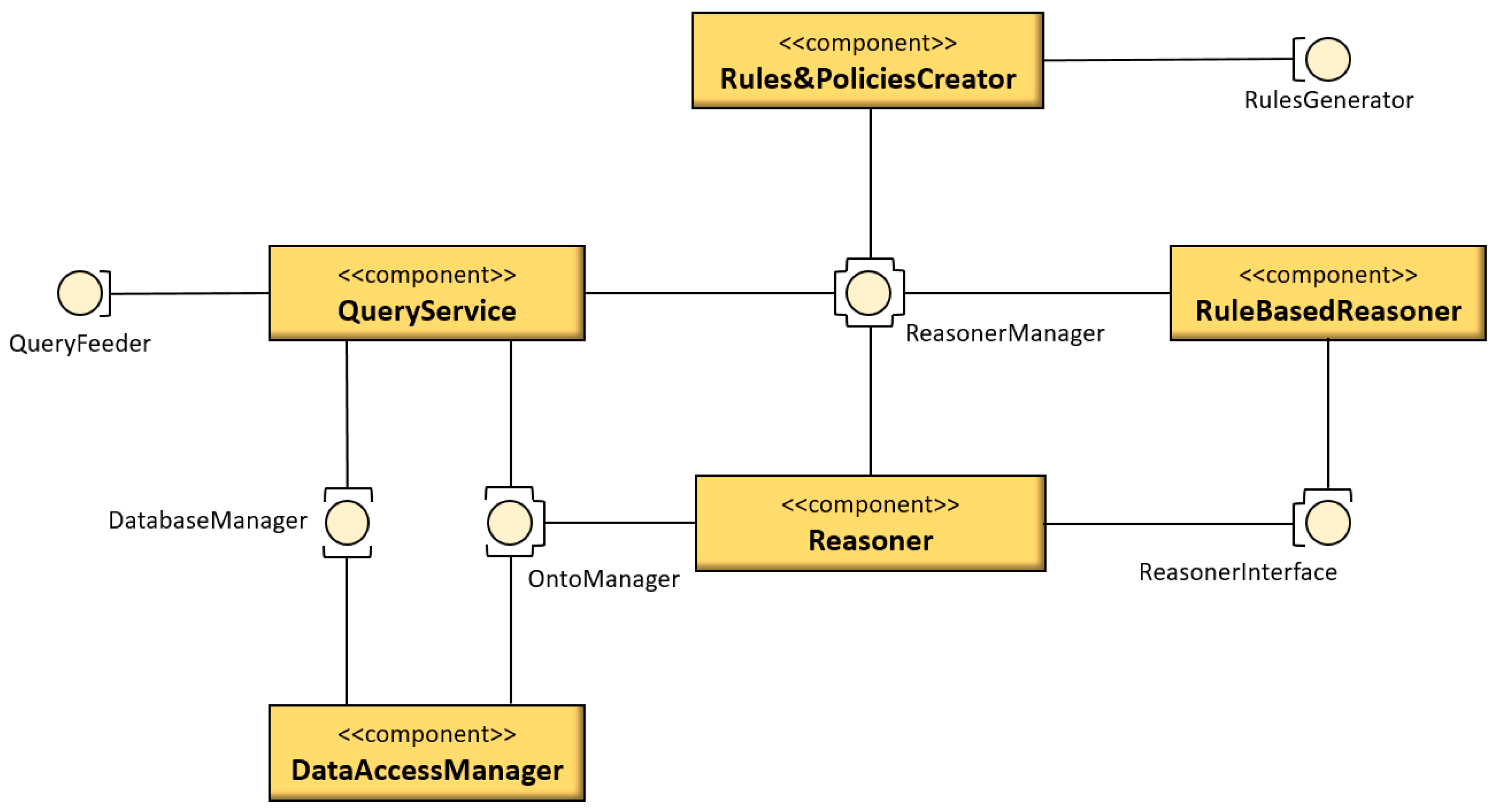
3.4. Query Service
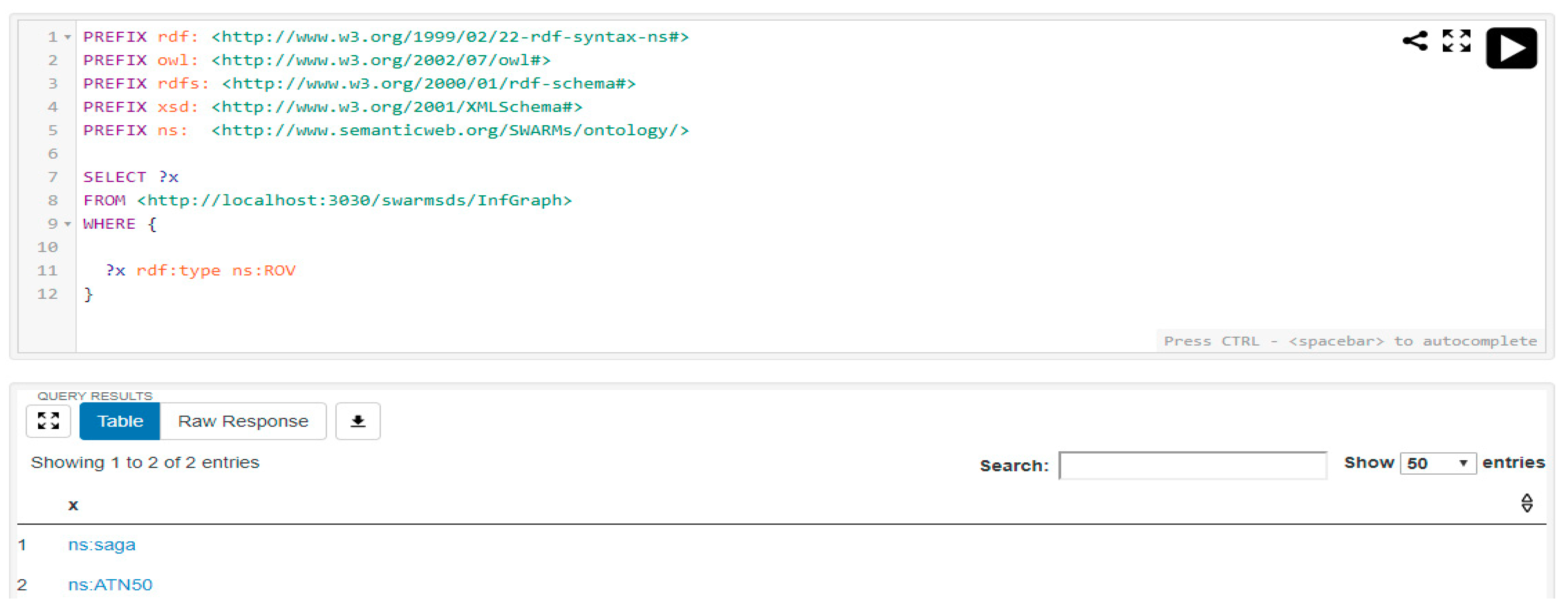
3.4.1. Simple Query
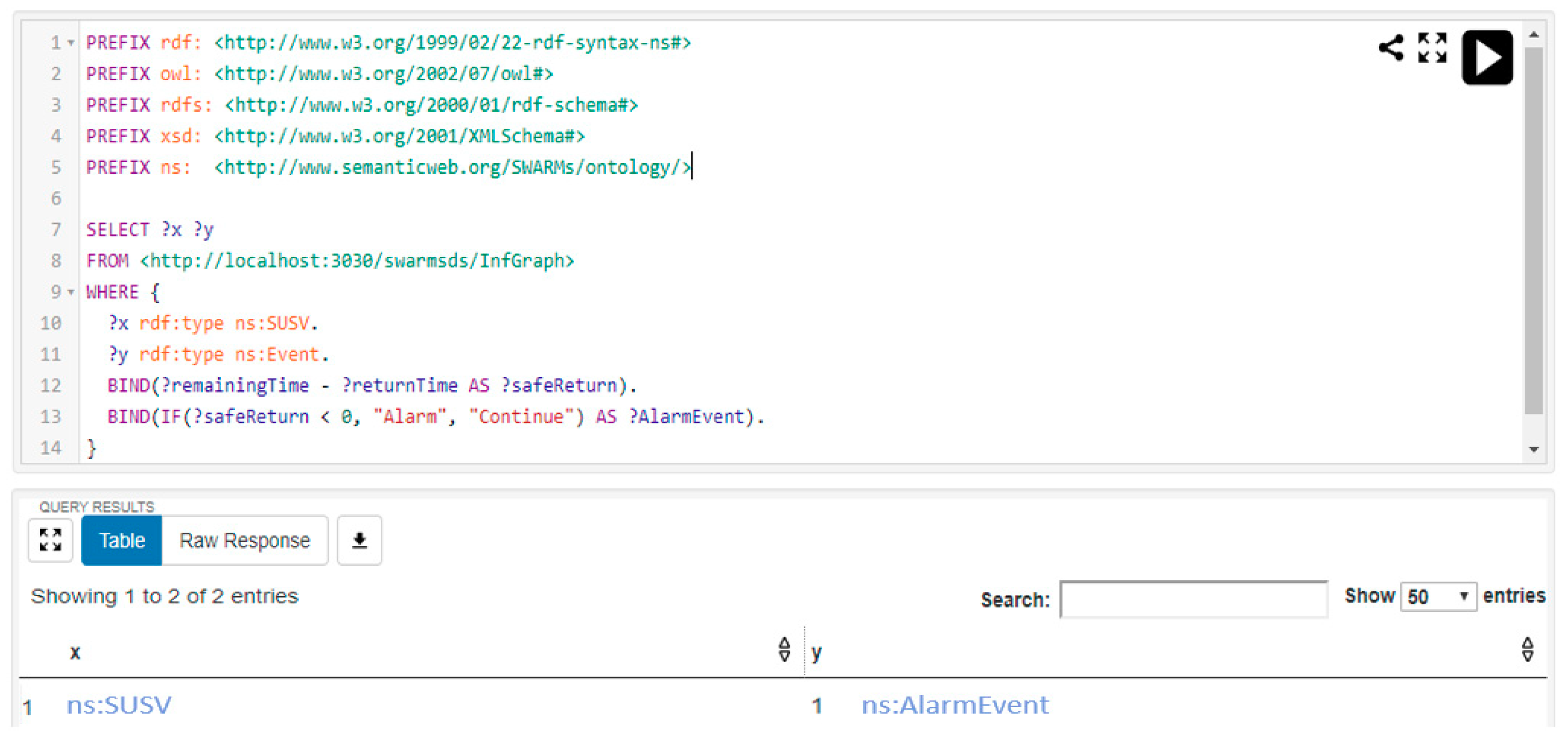
3.4.2. Complex Query
4. Evaluation and Results
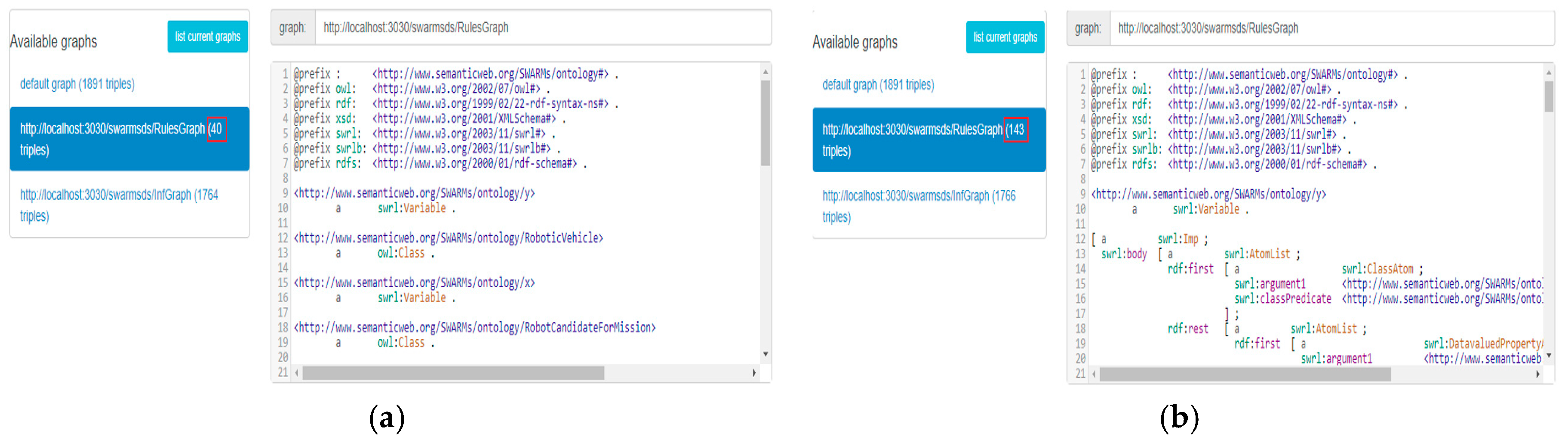
4.1. Verification of Inserting SWRL Rules
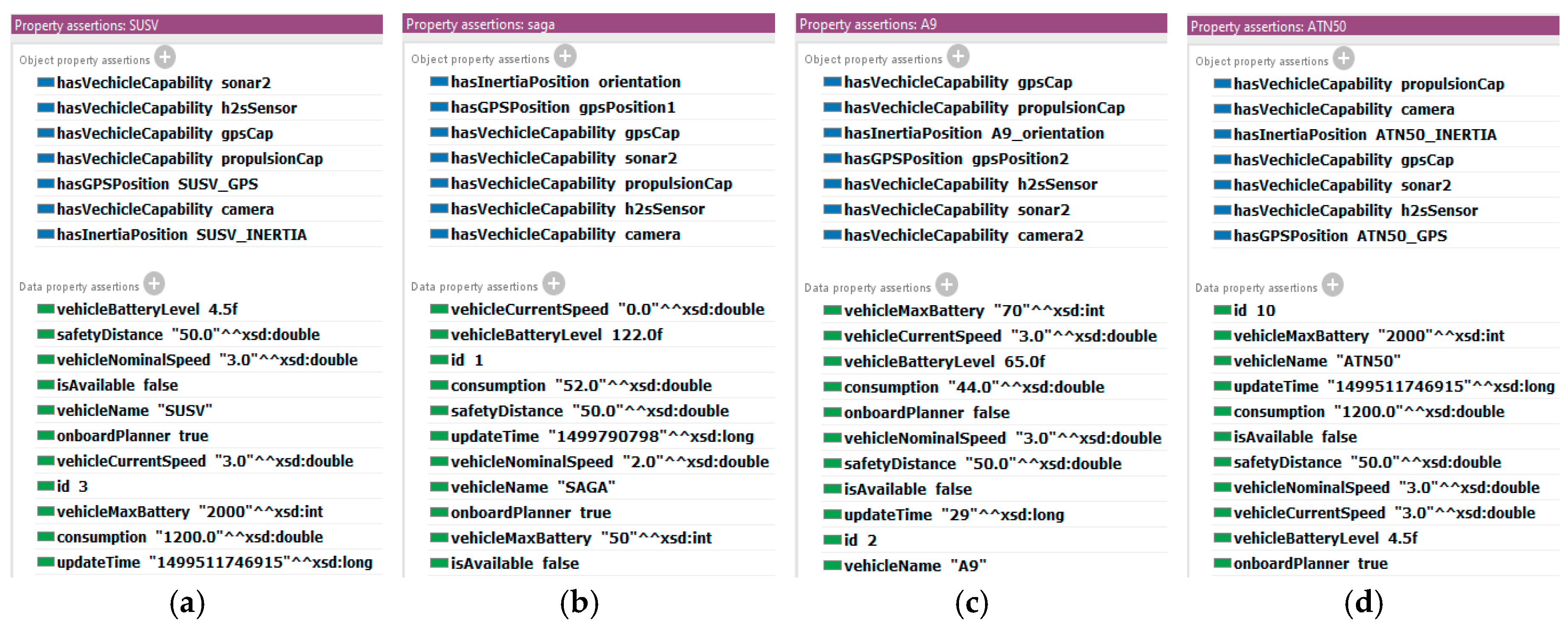
4.2. Verification of Querying the Udated SWARMs Ontology
5. Conclusions and Future Work
5.1. Conclusions
- The SWARMs ontology is on the basis of the Web Ontology Language (OWL) and it is capable of representing complex models and address heterogeneous information of the underwater environment and autonomous robots. Therefore, the SWARMs project selects OWL to model the information within the platform. The SWARMs ontology consists of one core ontology and four domain-specific ontologies, including the communication, environment, mission planning, and robotic vehicles domains. As an information model, the SWARMs ontology enables the knowledge sharing and information abstractions in specific domains to help heterogeneous robotic vehicles obtaining a common understanding of shared knowledge. With the help of SWARMs ontology, various robotic vehicles could work with each other for the purpose of completing complex underwater and maritime missions cooperatively. Based on the successful experience of modelling the SWARMs ontology, OWL is a promising approach to represent information of complex environments and robotic vehicles.
- The Semantic Web Rule Language (SWRL) is combined with the SWAMRs ontology for the purpose of overcoming the drawbacks of OWL-based ontologies. OWL-based ontologies cannot represent the general rules, however, with the help of SWRL rules, marine experts and human operators are able to turn their knowledge and experience as user-defined rules and insert them into the SWARMs ontology during runtime. All the SWRL rules are manipulated in a text file before insertion. A rules insertion mechanism is designed and implemented in this paper. The proposed mechanism specifies several steps of model transformations to convert the SWARMs ontology between different formats for the possibility of rule insertions. It is worth noting that the rules insertion mechanism allow SWARMs users to insert multiple rules in one time, which greatly increases the efficiency of rules insertion. Conclusively, SWRL rules could enable the OWL-based ontologies to represent general rules and enhance the completeness of ontologies. Compared with inserting the SWRL rules in a specific editor, the proposed approach does not require the SWARMs users to have knowledge about the editors. Meanwhile, the proposed rules insertion mechanism is more efficient and convenient.
- A rule-based reasoner is implemented to provide the SWARMs users with query services. In the reasoning module, the initial facts of SWARMs ontology and user-defined SWRL rules are loaded to the inference engine from the knowledge base and rule base respectively. Then, the rule-based reasoner is able to perform the inference and generate query results. In this paper, the query service is provided by Apache Jena Fuseki. After all the triples of SWARMs ontology and SWRL rules are loaded in the server, the SWARMs users can write SPARQL queries and request inference results. The query services not only can check the status of robotic vehicles and environment information, but are also able to give feedback to the users regarding the emergency events and decision corrections. It is concluded that the rule-based reasoner is a promising approach to increase the inference capability of SWARMs ontology and provide the SWARMs users with precise query services.
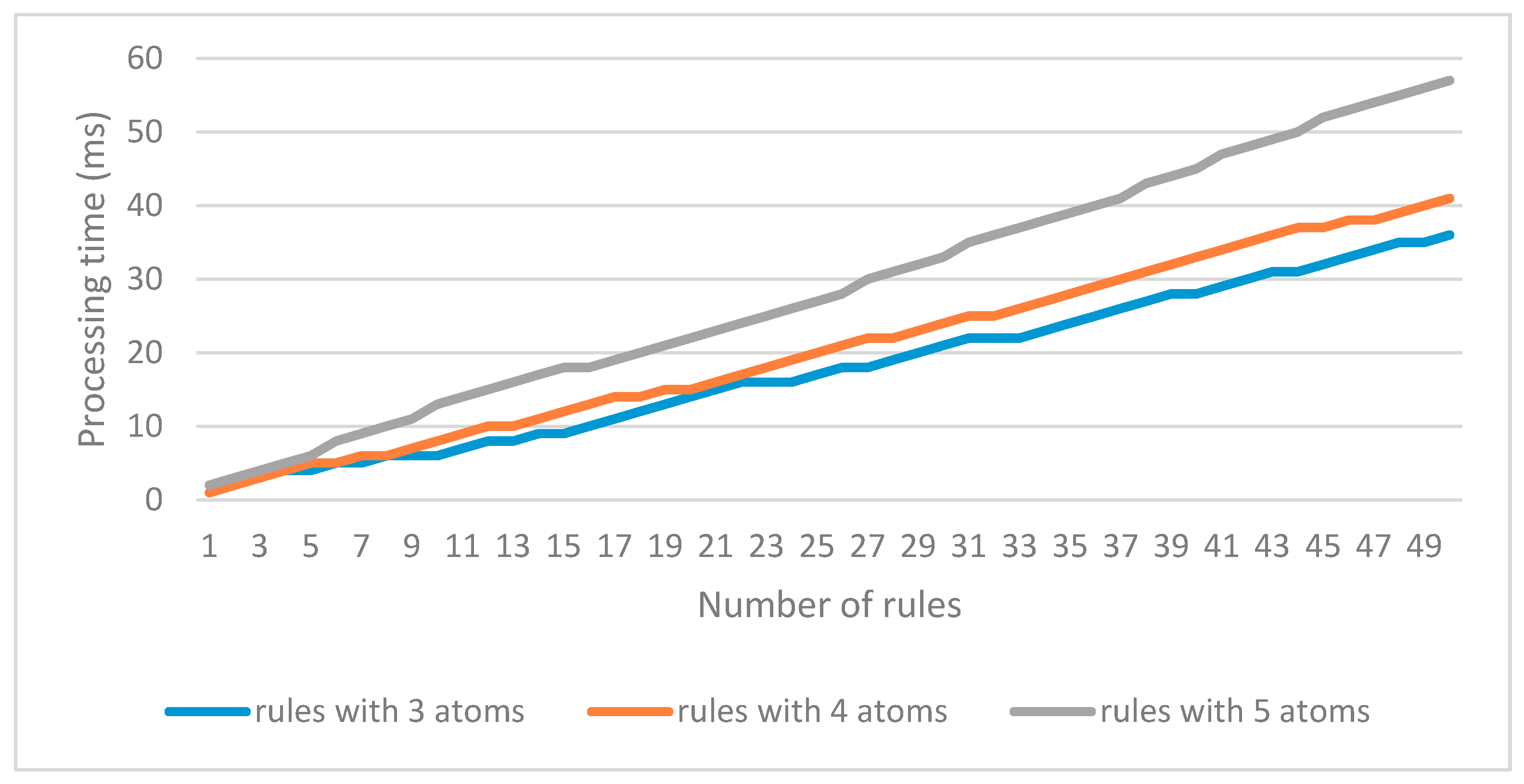
- Lastly, experimental tests are performed in order to verify the proposed rules insertion mechanism and the rule-based reasoner. In this paper, the success of rules insertion and the insertion efficiency are tested. No matter inserting a single rule or multiple rules at once, the successful insertions are ensured with high efficiency. Afterwards, the rule-based reasoner is testified by requesting simple and complex queries. The query results are totally correct. Consequently, the rules insertion mechanism and rule-based reasoner are feasible and useful for the SWARMs project.
5.2. Future Work
- Firstly, regarding OWL, it is necessary to extend and enrich the SWARMs ontology with more elements, such as various robotic vehicles, communication approaches, user cases, and environment landmarks. Meanwhile, though the SWARMs ontology is designed to provide a common information model for underwater environment and robotic vehicles, the reusability of such ontology should be taken into consideration for other underwater robotics projects.
- Secondly, it is worth exploring the extensibility of SWRL rules. Apart from the expressions of general rules, statistics-based uncertainty also existed in the SWARMs project. It is promising to implement a probabilistic extension of SWRL to deal with the incomplete or partial knowledge. With the help of probabilistic extension, certain reasoning algorithms (such as Multi-Entity Bayesian Network algorithm) could be executed in order to infer uncertainties, providing an improved query services to the SWARMs users.
- Thirdly, a conflict-free mechanism for rules insertion should be developed in order to avoid the redundancy and complexity of the rule base. Repeated rules and conflict rules may result in difficulties for the rule-based reasoner to understand and perform inferences. The conflict-free mechanism aims at filtering the SWRL rules and eliminating unnecessary ones, keeping the simplicity of the rule base in this way.
Author Contributions
Funding
Conflicts of Interest
References
- Bogue, R. Underwater robots: A review of technologies and applications. Ind. Robot 2015, 42, 186–191. [Google Scholar] [CrossRef]
- Capocci, R.; Dooly, G.; Omerdic, E.; Coleman, J.; Newe, T.; Toal, D. Inspection-class remotely operated vehicles—A review. J. Mar. Sci. Eng. 2017, 5, 13. [Google Scholar] [CrossRef]
- Sahu, B.K.; Subudhi, B. The state of art of autonomous underwater vehicles in current and future decades. In Proceedings of the 2014 First International Conference on Automation, Control, Energy and Systems (ACES), Hooghy, India, 1–2 February 2014. [Google Scholar]
- Kato, N.; Choyekh, M.; Dewantara, R.; Senga, H.; Chiba, H.; Kobayashi, E.; Yoshie, M.; Tanaka, T.; Short, T. An autonomous underwater robot for tracking and monitoring of subsea plumes after oil spills and gas leaks from seafloor. J. Loss Prev. Process Ind. 2017, 50, 386–396. [Google Scholar] [CrossRef]
- Albitar, H.; Dandan, K.; Ananiev, A.; Kalaykov, I. Underwater Robotics: Surface cleaning technics, adhesion and locomotion systems. Int. J. Adv. Robot. Syst. 2016, 13, 7. [Google Scholar] [CrossRef]
- Jaffe, J.S.; Franks, P.J.S.; Roberts, P.L.D.; Mirza, D.; Schurgers, C.; Kastner, R.; Boch, A. A swarm of autonomous miniature underwater robot drifters for exploring submesoscale ocean dynamics. Nat. Commun. 2017, 8, 14189. [Google Scholar] [CrossRef] [PubMed]
- Kapoutsis, A.C.; Chatzichristofis, S.A.; Doitsidis, L.; de Sousa, J.B.; Pinto, J.; Braga, J.; Kosmatopoulos, E.B. Real-time adaptive multi-robot exploration with application to underwater map construction. Auton. Robot. 2016, 40, 987–1015. [Google Scholar] [CrossRef]
- From, P.J.; Gravdahl, J.T.; Pettersen, K.Y. Underwater Robotic Systems; Advances in Industrial Control; Springer-Verlag: London, UK, 2014; pp. 307–324. [Google Scholar]
- Kootbally, Z.; Kramer, T.R.; Schlenoff, C.; Gupta, S.K. Overview of an ontology-based approach for kit building applications. In Proceedings of the 11th IEEE International Conference on Semantic Computing (ICSC), San Diego, CA, USA, 30 January–1 February 2017. [Google Scholar]
- Gil, D.; Ferrandez, A.; Mora-Mora, H.; Peral, J. Internet of Things: A review of surveys based on context aware intelligent services. Sensors 2016, 16, 1069. [Google Scholar] [CrossRef] [PubMed]
- Rivero, C.R.; Hernandez, I.; Ruiz, D.; Corchuelo, R. Benchmarking data exchange among semantic-web ontologies. IEEE Trans. Knowl. Data Eng. 2013, 25, 1997–2009. [Google Scholar] [CrossRef]
- Lezcano, L.; Sicilla, M.A.; Rodriguez-Solano, C. Integrating reasoning and clinical archetypes using OWL ontologies and SWRL rules. J. Biomed. Inform. 2011, 44, 343–353. [Google Scholar] [CrossRef] [PubMed]
- Valiente-Rocha, P.A.; Lozano-Tello, A. Ontology and SWRL-based learning model for home automation controlling. In Ambient Intelligence and Future Trends—International Symposium on Ambient Intelligence (ISAML 2010); Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Beimel, D.; Peleg, M. Using OWL and SWRL to represent and reason with situation-based access control policies. Data Knowl. Eng. 2011, 70, 596–615. [Google Scholar] [CrossRef]
- Matheus, C.J.; Baclawski, K.; Kokar, M.M.; Letkowski, J.J. Using SWRL and OWL to capture domain knowledge for a situation awareness application applied to a supply logistics scenario. In Proceedings of the 1st International Conference on Rules and Rule Markup Languages for the Semantic Web, Galway, Ireland, 10–12 November 2005. [Google Scholar]
- Pulido, J.R.G.; Ruiz, M.A.G.; Herrera, R.; Cabello, E.; Legrand, S.; Elliman, D. Ontology languages for the semantic web: A never completely updated review. Knowl. Based Syst. 2006, 19, 489–497. [Google Scholar] [CrossRef]
- Knowledge Interchange Format—Draft Proposed American National Standard (dpANS). Available online: Logic.stanford.edu/kif/dpans.html (accessed on 5 September 2018).
- Tekli, J. An overview on XML semantic disambiguation from unstructured text to semi-structured data: Background, applications and ongoing challenges. IEEE Trans. Knowl. Data Eng. 2016, 28, 1383–1407. [Google Scholar] [CrossRef]
- Ma, Z.M.; Capretz, M.A.M.; Yan, L. Storing massive Resource Description Framework (RDF) data: A survey. Knowl. Eng. Rev. 2016, 31, 391–413. [Google Scholar] [CrossRef]
- Gruber, T.R.; Olsen, G.R.; Runkel, J. The configuration design ontologies and the VT elevator domain theory. Int. J. Hum. Comput. Stud. 1996, 44, 569–598. [Google Scholar] [CrossRef]
- Garcia-Castro, R.; Gomez-Perez, A. Interoperability results for Semantic Web technologies using OWL as the interchange language. Web Semant. 2010, 8, 278–291. [Google Scholar] [CrossRef]
- SWARMs Project. Available online: www.swarms.eu (accessed on 28 June 2018).
- Li, W.J.; Yan, L.; Zhang, F.; Chen, X. A formal approach of construction fuzzy XML data model based on OWL 2 Ontologies. IEEE Access 2018, 6, 22025–22033. [Google Scholar] [CrossRef]
- Zheng, Z.Y.; Liu, Z.Y.; Li, L.; Li, D.; Wang, Z.F. A fuzzy MEBN ontology language based on OWL2. In Proceedings of the 2nd International Conference on Fuzzy Systems and Data Mining (FSDM), Macau, China, 1–14 December 2016. [Google Scholar]
- Mohammed, A.W.; Xu, Y.; Liu, M. Ontology-based reasoning with uncertain context in a smart home: A decision network approach. In Proceedings of the IEEE/WIC/ACM International Conference on Web Intelligence and Intelligent Agent Technology (WI-IAT), Singapore, 6–9 December 2015. [Google Scholar]
- Fritze, A.; Monks, U.; Holst, C.A.; Lohweg, V. An approach to automated fusion system design and adaptation. Sensors 2017, 17, 601. [Google Scholar] [CrossRef] [PubMed]
- Wang, S.Y.; Wan, J.F.; Li, D.; Liu, C.L. Knowledge reasoning with semantic data for real-time data processing in smart factory. Sensors 2018, 18, 471. [Google Scholar] [CrossRef] [PubMed]
- Modelling in OWL 2 without Restrictions. Available online: https://arxiv.org/pdf/1212.2902.pdf (accessed on 10 September 2018).
- A Syntax for Rules in OWL 2. Available online: www.cs.ox.ac.uk/files/2445/rulesyntaxTR.pdf (accessed on 10 September 2018).
- DAML Program. Available online: www.daml.org (accessed on 28 June 2018).
- Sun, Y.C.; Zhang, J.S.; Zhao, W.; Tian, Y.J. Managing and refining rule set for SWRL. In Proceedings of the 4th International Conference on Wireless Communications Networking and Mobile Computing, Dalian, China, 12–14 October 2008. [Google Scholar]
- Chen, X.H.; Gao, P.P.; Wang, J.; He, F.; He, K.Q. Customization of service-oriented domain models using SWRL. In Proceedings of the IEEE International Conference on Services Computing, Anchorage, AK, USA, 27 June–2 July 2014. [Google Scholar]
- Ameen, A.; Khan, K.U.R.; Rani, B.P. SemRPer—A rule based personalization system for semantic web. Int. J. Web Appl. 2015, 7, 23–38. [Google Scholar]
- Wang, P.Q.; Luo, H.; Sun, Y. A habit-based SWRL generation and reasoning approach in smart home. In Proceedings of the 21st IEEE International Conference on Parallel and Distributed System (ICPADS), Melbourne, Australia, 14–17 December 2015. [Google Scholar]
- O’Connor, M.T.; Knublauch, H.; Tu, S.; Grosof, B.; Dean, M.; Grosso, W.; Musen, M. Supporting rule system interoperability on the semantic web with SWRL. In Proceedings of the 4th International Semantic Web Conference (ISWC), Galway, Ireland, 6–10 November 2005. [Google Scholar]
- Wang, E.; Kim, Y.S. A teaching strategies engine using translation from SWRL and Jess. In Proceedings of the 8th International Conference on Intelligent Tutoring Systems, Jhongli, Taiwan, 26–30 June 2006. [Google Scholar]
- Sirin, E.; Parsia, B.; Grau, B.C.; Kalyanpur, A.; Katz, Y. Pellet: A partical OWL-DL reasoner. Web Semant. 2007, 5, 51–53. [Google Scholar] [CrossRef]
- McBride, G. Jena: Implementing the RDF model and syntax specification. In Proceedings of the 2nd International Workshop on the Web of Things, San Francisco, CA, USA, 12 June 2011. [Google Scholar]
- Rattanasawad, T.; Buranarach, M.; Saikaew, K.R.; Supnithi, T. A comparative study of rule-based inference engines for the semantic web. IEICE Trans. Inf. Syst. 2018, 1, 82–89. [Google Scholar] [CrossRef]
- Mutharaju, R.; Mateti, P.; Hitzler, P. Towards a rule based distributed OWL reasoning framework. In Proceedings of the 12th International Experiences and Directions Workshop on OWL (OWLED), Bethlehem, PA, USA, 9–10 October 2015. [Google Scholar]
- Sun, Y.C.; Clark, O.G. Two learning approaches for a rule-based intuitive reasoner. Expert Syst. Appl. 2010, 38, 6469–6479. [Google Scholar] [CrossRef]
- Bak, J.; Jedrzejek, C. Rule-based reasoning system for OWL 2 RL ontologies. In Proceedings of the 6th International Conference on Computational Collective Intelligence (ICCCI), Seoul, Korea, 24–26 September 2014. [Google Scholar]
- Nalepa, G.J.; Furmanska, W.T. Pellet-heaRT—Proposal of an architecture for ontology systems with rules. In Proceedings of the 33rd Annual German Conference on Artificial Intelligence (KI), Karlsruhe, Germany, 21–24 September 2010. [Google Scholar]
- Brunner, S.; Kucera, M.; Waas, T. Ontologies used in robotics: A survey with an outlook for automated driving. In Proceedings of the IEEE International Conference on Vehicular Electronics and Safety (ICVES), Vienna, Austria, 27–28 June 2017. [Google Scholar]
- Sadik, A.R.; Urban, B. An ontology-based approach to enable knowledge representation and reasoning in Worker-Cobot agile manufacturing. Future Internet 2017, 9, 90. [Google Scholar] [CrossRef]
- Ali, F.; Kwak, D.; Khan, P.; El-Sappagh, S.H.A.; Islam, S.M.R.; Park, D.; Kwak, K.S. Merged ontology and SVM-based information extraction and recommendation system for social robots. IEEE Access 2017, 5, 12344–12359. [Google Scholar] [CrossRef]
- Fiorini, S.R.; Carbonera, J.L.; Goncalves, P.; Jorge, V.A.M.; Rey, V.F.; Haidegger, T.; Abel, M.; Redfield, S.A.; Balakirsky, S.; Ragavan, V.; et al. Extensions to the core ontology for robotics and automation. Robot. Comput. Integr. Manuf. 2015, 33, 3–11. [Google Scholar] [CrossRef]
- Gruber, T.R. Toward principles for the design of ontologies used for knowledge sharing. Int. J. Hum. Comput. Stud. 1995, 43, 907–928. [Google Scholar] [CrossRef]
- Bayat, B.; Bermejo-Alonso, J.; Carbonera, J.; Facchinetti, T.; Fiorini, S.; Goncalves, P.; Jorge, V.A.M.; Habib, M.; Khamis, A.; Melo, K.; et al. Requirements for building an ontology for autonomous robots. Ind. Robot 2016, 43, 469–480. [Google Scholar] [CrossRef]
- Cuenca Grau, B.; Parsia, B.; Sirin, E.; Kalyanpur, A. Modularity and web ontologies. In Proceedings of the 10th International Conference on Principles of Knowledge Representation and Reasoning, Lake District, UK, 2–5 June 2006. [Google Scholar]
- Li, X.; Bilbao, S.; Martin-Wanton, T.; Bastos, J. SWARMs ontology: A common information model for the cooperation of underwater robots. Sensors 2017, 17, 569. [Google Scholar] [CrossRef] [PubMed]
- Papasalouros, A.; Kotisi, K.; Nikitakos, N. Towards an intelligent tutoring system for environmental decision makers. In Proceedings of the 1st International Workshop on Artificial Intelligence Applications in Environmental Protection, Thessaloniki, Greece, 22–25 April 2009. [Google Scholar]
- Xiao, G.D.; Wang, B.; Deng, Z.H.; Fu, M.Y.; Ling, Y. An acoustic communication time delays compensation approach for master-slave AUV cooperative navigation. IEEE Sens. J. 2017, 17, 504–513. [Google Scholar] [CrossRef]
- Ghilezan, A.; Hnatiuc, M. The ROV communication and control. In Proceedings of the 23rd IEEE International Symposium for Design and Technology in Electronic Packaging (SIITME), Constanta, Romania, 26–29 October 2017. [Google Scholar]
- Kopf, A.; Freudenthal, T.; Ratmeyer, V.; Bergenthal, M.; Lange, M.; Fleischmann, T.; Hammerschmidt, S.; Seiter, C.; Wefer, G. Simple, affordable, and sustainable borehole observatories for complex monitoring objectives. Geosci. Instrum. Meth. 2015, 4, 99–109. [Google Scholar] [CrossRef]
- Marzbanrad, A.; Sharafi, J.; Eghtesad, M.; Kamali, R. Design, construction and control of a Remotely Operated Vehicle (ROV). In Proceedings of the ASME International Mechanical Engineering Congress and Exposition (IMECE), Denver, CO, USA, 11–17 November 2011. [Google Scholar]
- Zhai, Z.Y.; Martinez, J.F.; Martinez, N.L.; Rodriguez-Molina, J. A mission planning approach for precision farming systems based on multi-objective optimization. Sensors 2018, 18, 1795. [Google Scholar] [CrossRef] [PubMed]
- Manley, J.E. Unmanned maritime vehicles, 20 years of commercial and technical evolution. In Proceedings of the MTS/IEEE Oceans Conference, Monterey, CA, USA, 19–23 September 2016. [Google Scholar]
- Indiveri, G.; Antonelli, G.; Arrichiello, F.; Caff’az, A.; Caiti, A.; Casalino, G.; Volpi, N.C.; de Jong, I.B.; De Palma, D.; Duarte, H.; et al. Overview and first year progress of the widely scalable mobile underwater sonar technology H2020 project. In Proceedings of the 10th IFAC Conference on Control Applications in Marine Systems (CAMS), Trondheim, Norway, 13–16 September 2016. [Google Scholar]
- Manhaes, M.M.M.; Scherer, S.A.; Voss, M.; Douat, L.R.; Rauschenbach, T. UUV simulator: A gazebo-based package for underwater intervention and multi-robot simulation. In Proceedings of the MTS/IEEE Oceans Conference, Monterey, CA, USA, 19–23 September 2016. [Google Scholar]
- UUV Simulator 0.2. Available online: https://uuvsimulator.github.io/documentation/vehicles.html (accessed on 28 June 2018).
- Meditskos, G.; Bassiliades, N. A rule-based object-oriented OWL reasoner. IEEE Trans. Knowl. Data Eng. 2008, 20, 397–410. [Google Scholar] [CrossRef]
- SWRL: A Semantic Web Rule Language Combining OWL and RuleML (Version 0.7). Available online: https://www.w3g.org/Submission/SWRL/#3 (accessed on 28 June 2018).
- Helvacioglu, S.; Insel, M. Expert system applications in marine technologies. Ocean Eng. 2008, 35, 1067–1074. [Google Scholar] [CrossRef]
- O’Connor, M.; Tu, S.; Nyulas, C.; Das, A.; Musen, M. Querying the semantic web with SWRL. In Proceedings of the International Workshop on Rules and Rule Markup Languages for the Semantic Web, Orlando, FL, USA, 25–26 October 2007. [Google Scholar]
- Jain, R.; Duhan, N.; Sharma, A.K. Developing human family tree using SWRL rules. In Proceedings of the 3rd International Conference on Computing for Sustainable Global Development (INDIACom), New Delhi, India, 16–18 March 2016. [Google Scholar]
- SWRLTab. Available online: https://protegewiki.stanford.edu/wiki/SWRLTAB (accessed on 28 June 2018).
- Jena Ontology API. Available online: https://jena.apache.org/documentation/ontology (accessed on 28 June 2018).
- The OWL API. Available online: https://github.com/owlcs/owlapi/wiki (accessed on 28 June 2018).
- O’Connor, M.; Shankar, R.D.; Musen, M.; Das, A.; Nyulas, C. The SWRLAPI: A development environment for working with SWRL Rules. In Proceedings of the 5th OWLED Workshop on OWL: Experience and Directions, Karlsruhe, Germany, 26–27 October 2008. [Google Scholar]
- Zhang, Y.Z.; Luo, X.F.; Li, J.; Buis, J.J. A semantic representation model for design rationale of products. Adv. Eng. Inform. 2013, 27, 13–26. [Google Scholar] [CrossRef]
- Jing, M.; Boley, H. Interpreting SWRL rules in RDF graphs. Electron. Notes Theor. Comput. Sci. 2006, 151, 53–69. [Google Scholar]
- Khan, J.A.; Kumar, S. OWL, RDF, RDFS inference derivation using Jena semantic framework & Pellet reasoner. In Proceedings of the International Conference on Advances in Engineering and Technology Research (ICAETR), Unnao, India, 1–2 August 2014. [Google Scholar]
- Grzanek, K. Forward Chaining with State Monad. In Proceedings of the 15th International Conference on Artificial Intelligence and Soft Computing (ICAISC), Zakopane, Poland, 12–16 June 2016. [Google Scholar]
- Shi, H.; Chong, D.Z.; Yan, G.J. Evaluating an optimized backward chaining ontology reasoning system with innovative custom rules. Inf. Discov. Deliv. 2018, 43, 45–56. [Google Scholar] [CrossRef]
- Apache Jena Fuseki. Available online: https://jena.apache.org/documentation/fuseki2/ (accessed on 28 June 2018).




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Built-In | Example | Example Explanation |
|---|---|---|
| Comparisons | swrlb:equal | If the first argument and the second argument are the same. |
| Math | swrlb:abs | If the first argument is the absolute value of the second argument. |
| Boolean Values | swrlb:booleanNot | If the first argument is true and the second argument is false, or vice versa. |
| Strings | swrlb:startsWith | If the first argument starts with the second argument. |
| Date, Time and Duration | swrlb:time | If the first argument is the xsd:time representation, followed by arguments of hours, minutes, seconds and timezone. |
| URIs | swrlb:anyURI | If the first argument is a URI reference, followed by arguments of scheme, host, port, path, query and fragment. |
| Lists | swrlb:empty | If the first argument list is empty. |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhai, Z.; Martínez Ortega, J.-F.; Lucas Martínez, N.; Castillejo, P. A Rule-Based Reasoner for Underwater Robots Using OWL and SWRL. Sensors 2018, 18, 3481. https://doi.org/10.3390/s18103481
Zhai Z, Martínez Ortega J-F, Lucas Martínez N, Castillejo P. A Rule-Based Reasoner for Underwater Robots Using OWL and SWRL. Sensors. 2018; 18(10):3481. https://doi.org/10.3390/s18103481
Chicago/Turabian StyleZhai, Zhaoyu, José-Fernán Martínez Ortega, Néstor Lucas Martínez, and Pedro Castillejo. 2018. "A Rule-Based Reasoner for Underwater Robots Using OWL and SWRL" Sensors 18, no. 10: 3481. https://doi.org/10.3390/s18103481
APA StyleZhai, Z., Martínez Ortega, J.-F., Lucas Martínez, N., & Castillejo, P. (2018). A Rule-Based Reasoner for Underwater Robots Using OWL and SWRL. Sensors, 18(10), 3481. https://doi.org/10.3390/s18103481