A High Accuracy Time-Reversal Based WiFi Indoor Localization Approach with a Single Antenna †


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- We respectively study the influence of different factors on TR fingerprinting localization’s performance; we conduct three experiments and propose an improved metric to quantize these influences.
- In the offline stage of HATRFLA, a density-based clustering algorithm is used to adaptively obtain the number of fingerprints to be stored for each location. To our knowledge, this is first time that the density-based clustering algorithm has been used to optimize the fingerprint selection.
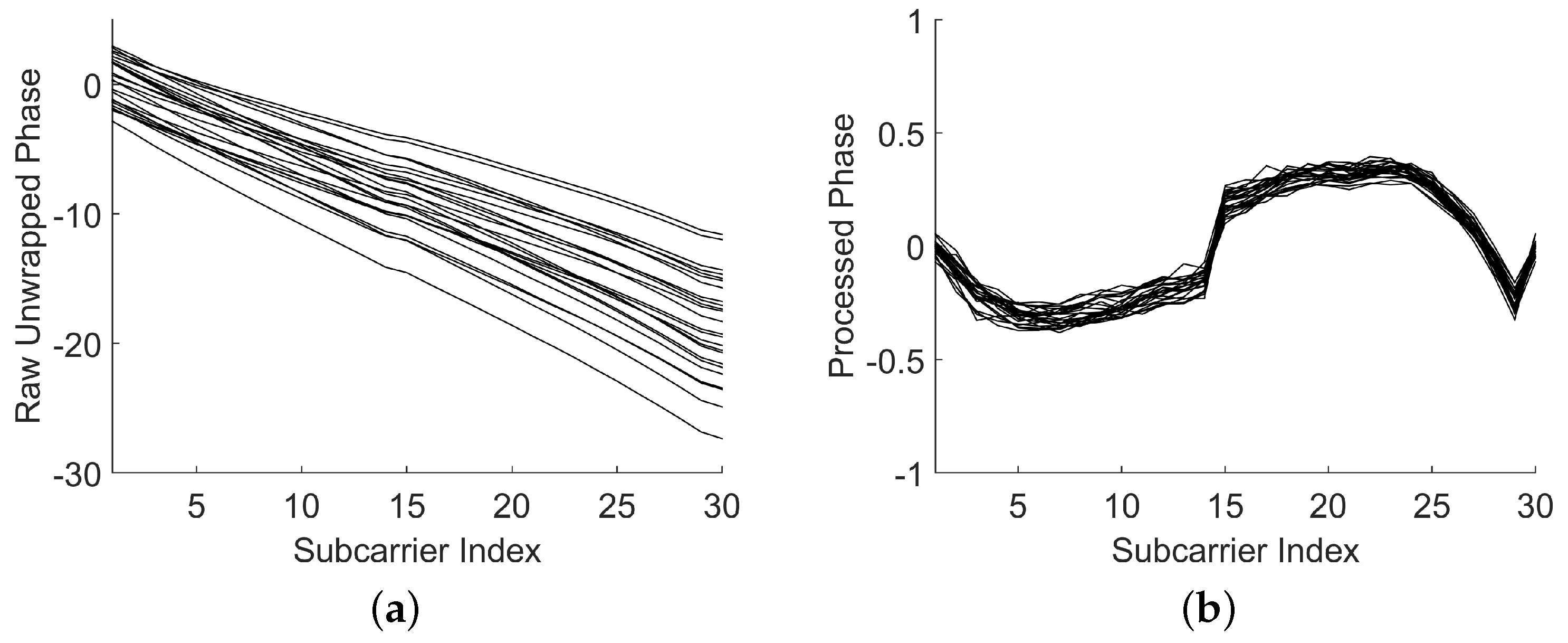
- In the online stage of HATRFLA, both the amplitude and phase of CSI are jointly considered. Based on this, two unique location-specified signatures are extracted and used to determine the location of the target. Thus, a higher localization accuracy can be achieved. As far as we know, this is the first time that a location-specified signatures based on the phase of CSI has been introduced into TR based localization.
- To highlight the proposal but without loss of generality, in our experiments, we only consider the simplest experimental setting, i.e., only a single communication link with a single 20 MHz channel under Non-Light Of Sight (NLOS) can be measured to obtain the CSI, which is common in life, but can be seen as a challenge for high accuracy localization. The experimental results show that the proposed algorithm performs well even in this case.
2. A High Accuracy TR Based Fingerprinting Localization Approach
2.1. Offline Stage
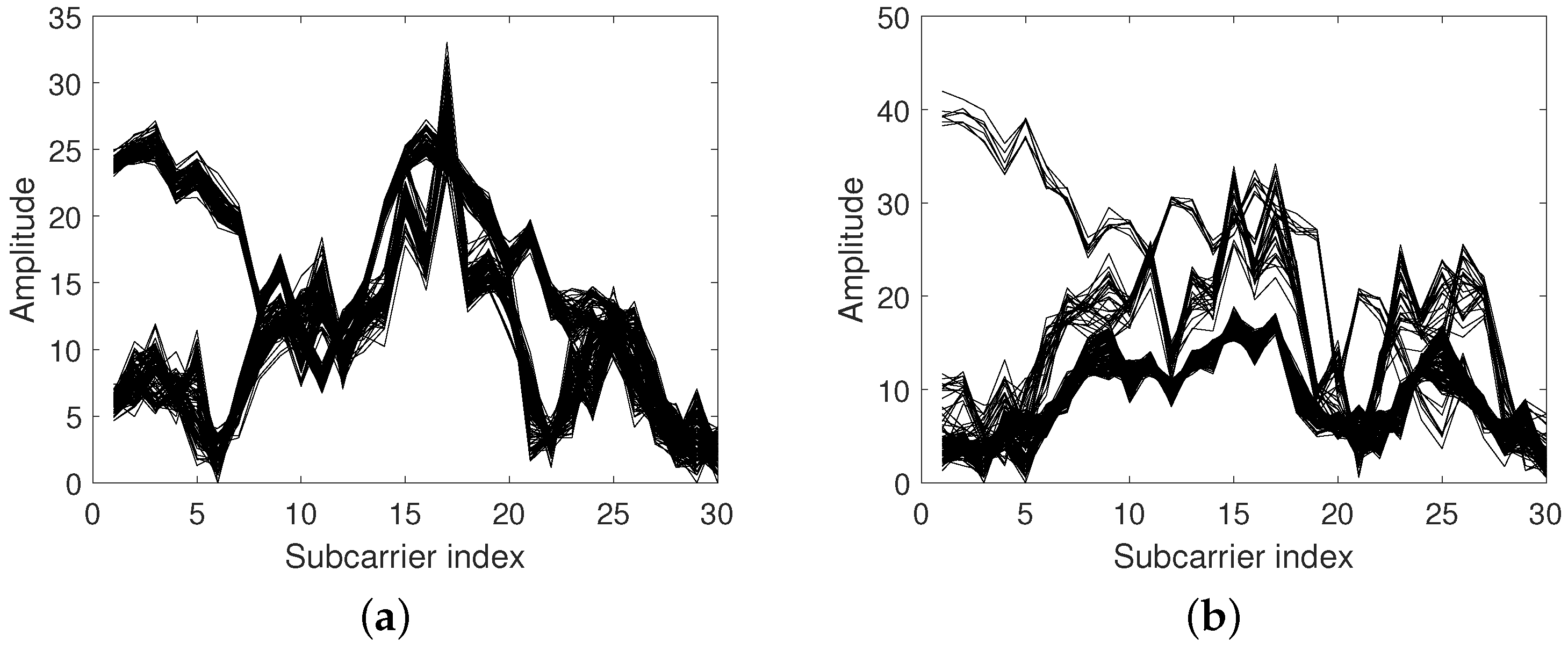
2.1.1. CSI Collection
2.1.2. Density-Based Clustering
| Algorithm 1 DBSCAN: Density-based spatial clustering of applications with noise |
| Require:: amplitude of ; : minimum neighbor number requirement for a central point of a cluster; : neighborhood radius; |
| Ensure: clustering result C |
| 1: : mark all points in as unvisited points, : mark all points in as non-noise points, : mark all points in as the state of not adding any clusters, : initial number of cluster; |
| 2: Normalize |
| 3: for each point p in do |
| 4: if then |
| 5: ; |
| 6: Calculate the Euclidean distance between this point and the other points and get a set of neighbors which have a distance of less than ; |
| 7: if then |
| 8: ; |
| 9: else |
| 10: ; |
| 11: ; |
| 12: repeat |
| 13: ; ; |
| 14: if then |
| 15: ; |
| 16: Calculate the Euclidean distance between this point and the other points and get a set of neighbors which have a distance of less than ; |
| 17: if then |
| 18: ; |
| 19: end if |
| 20: end if |
| 21: if then |
| 22: |
| 23: end if |
| 24: until k>num(N1) |
| 25: end if |
| 26: end if |
| 27: end for |
2.2. Online Stage
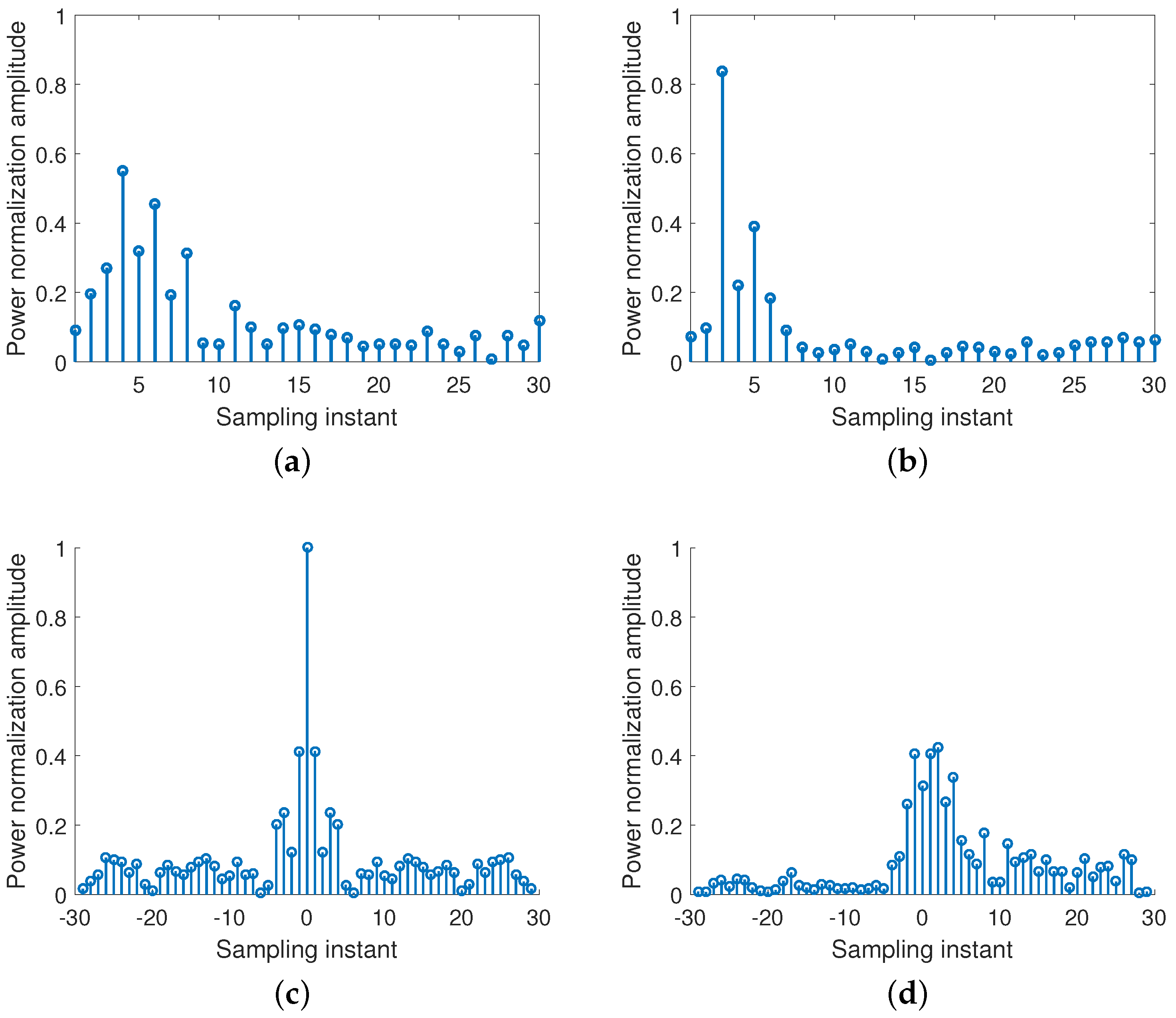
2.2.1. Spatial-Temporal Focusing of TR
2.2.2. An Improved Resonating Strength
- Phase Processing
- Matching Rating Calculation of the Processed Phase
2.2.3. Localization Estimation
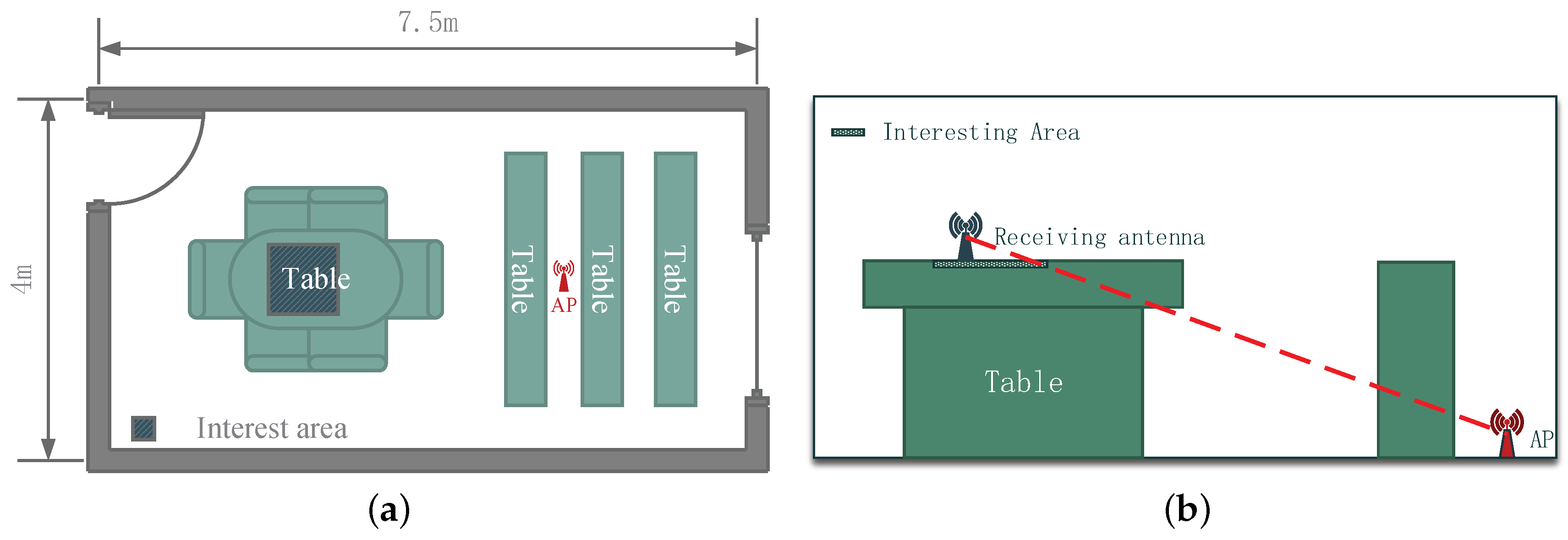
3. Experiment and Results
3.1. Evaluation of the Factors Influencing the Peformance of the Existing TR Based Localization
3.1.1. Time Reversal Metric
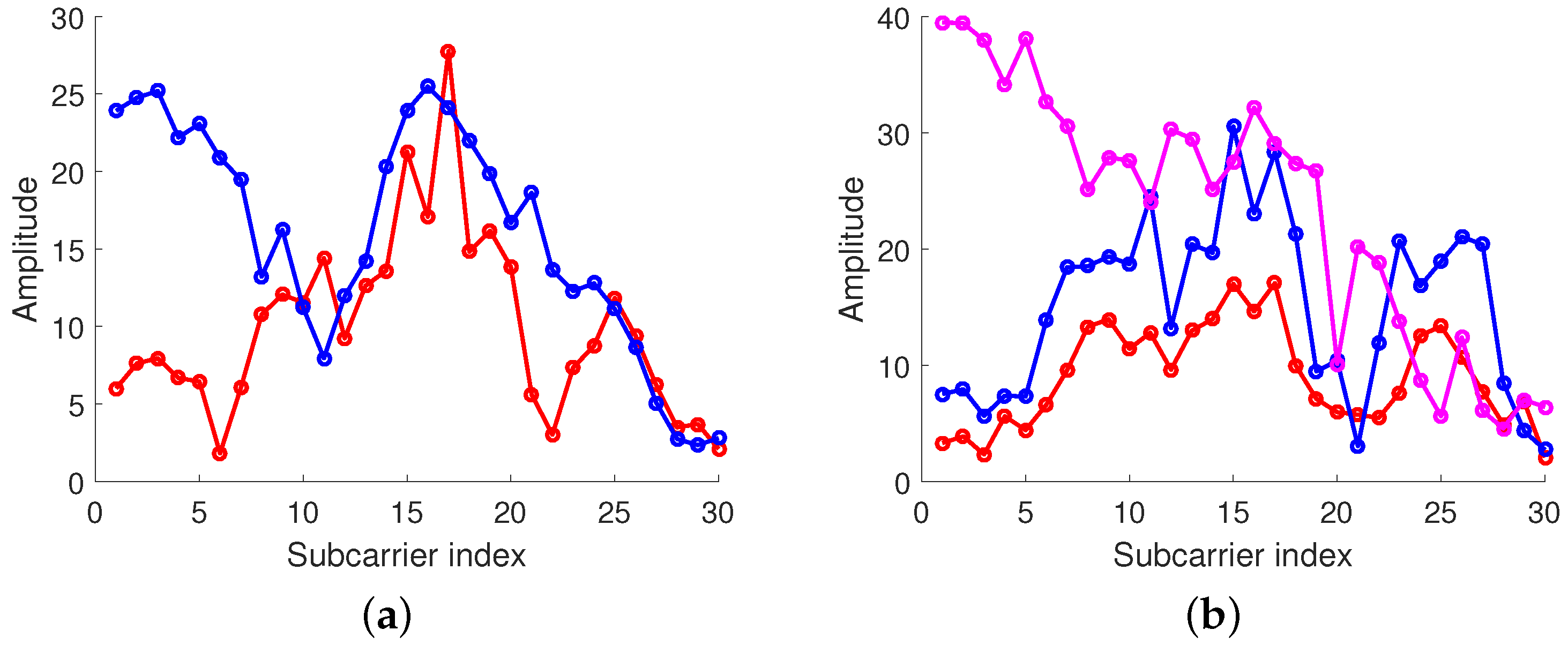
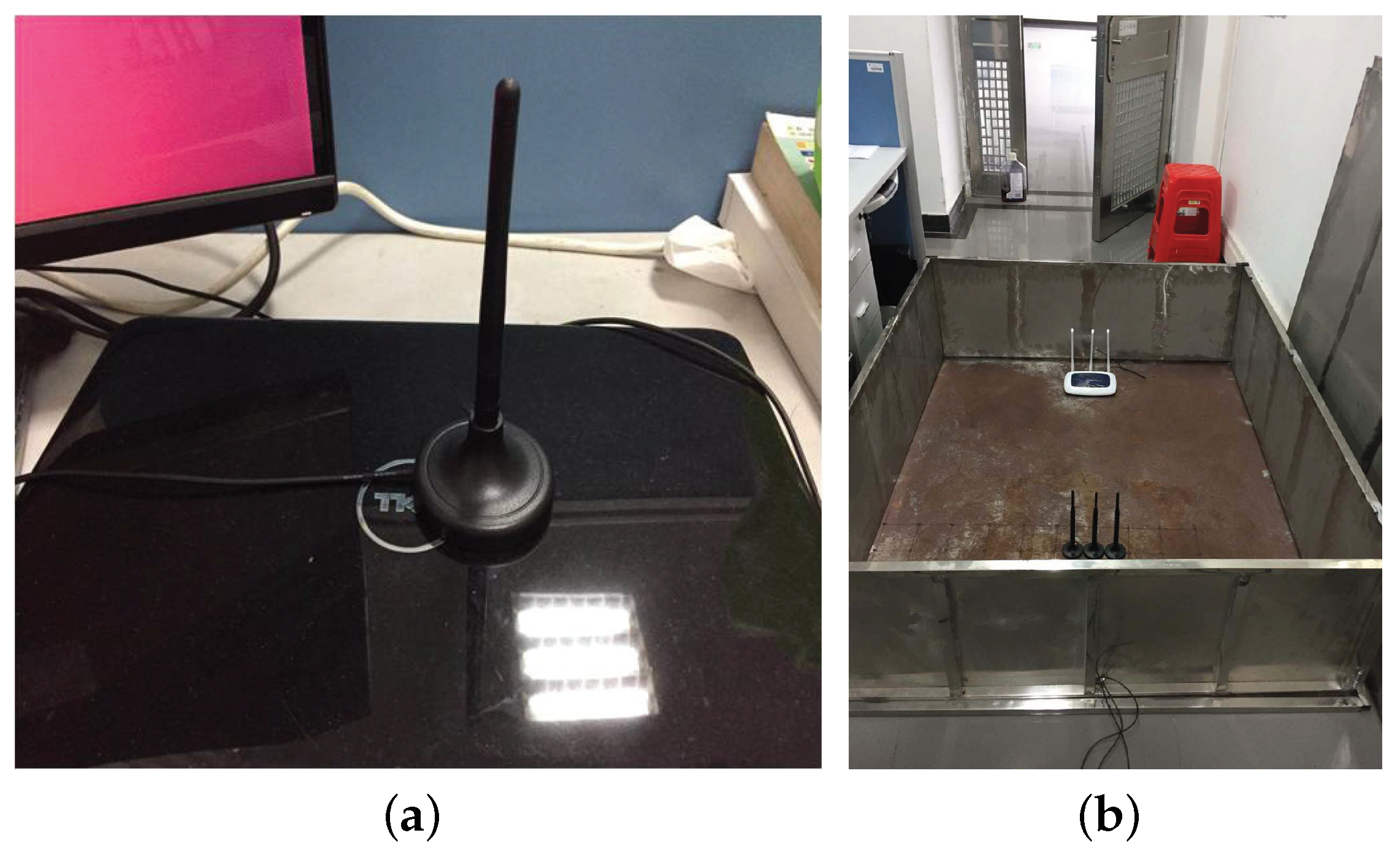
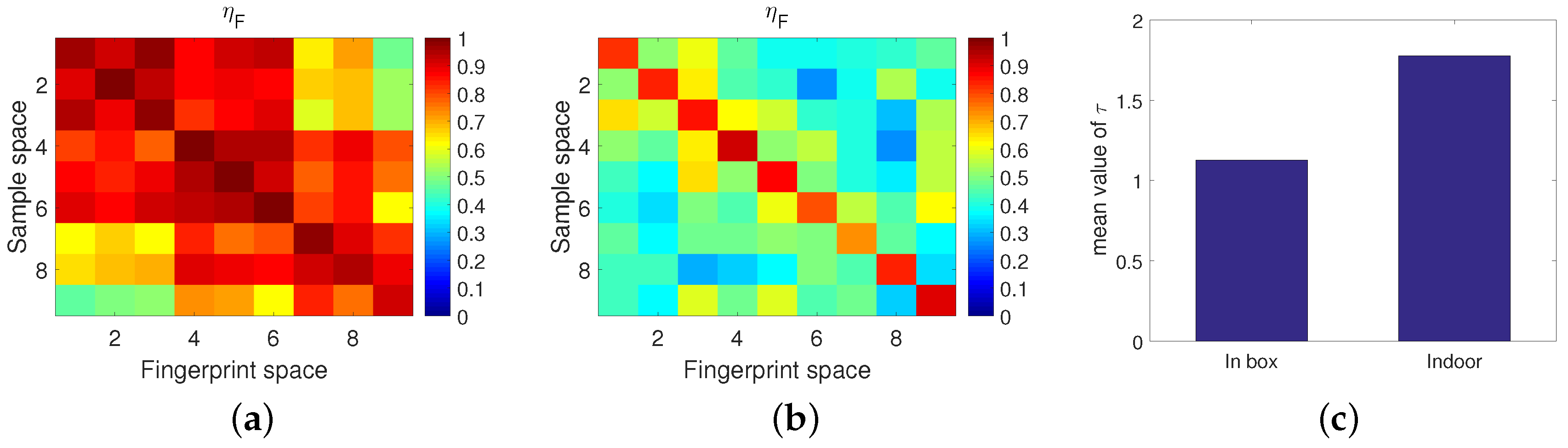
3.1.2. Influence of the Multipath Magnitude on TR Based Localization
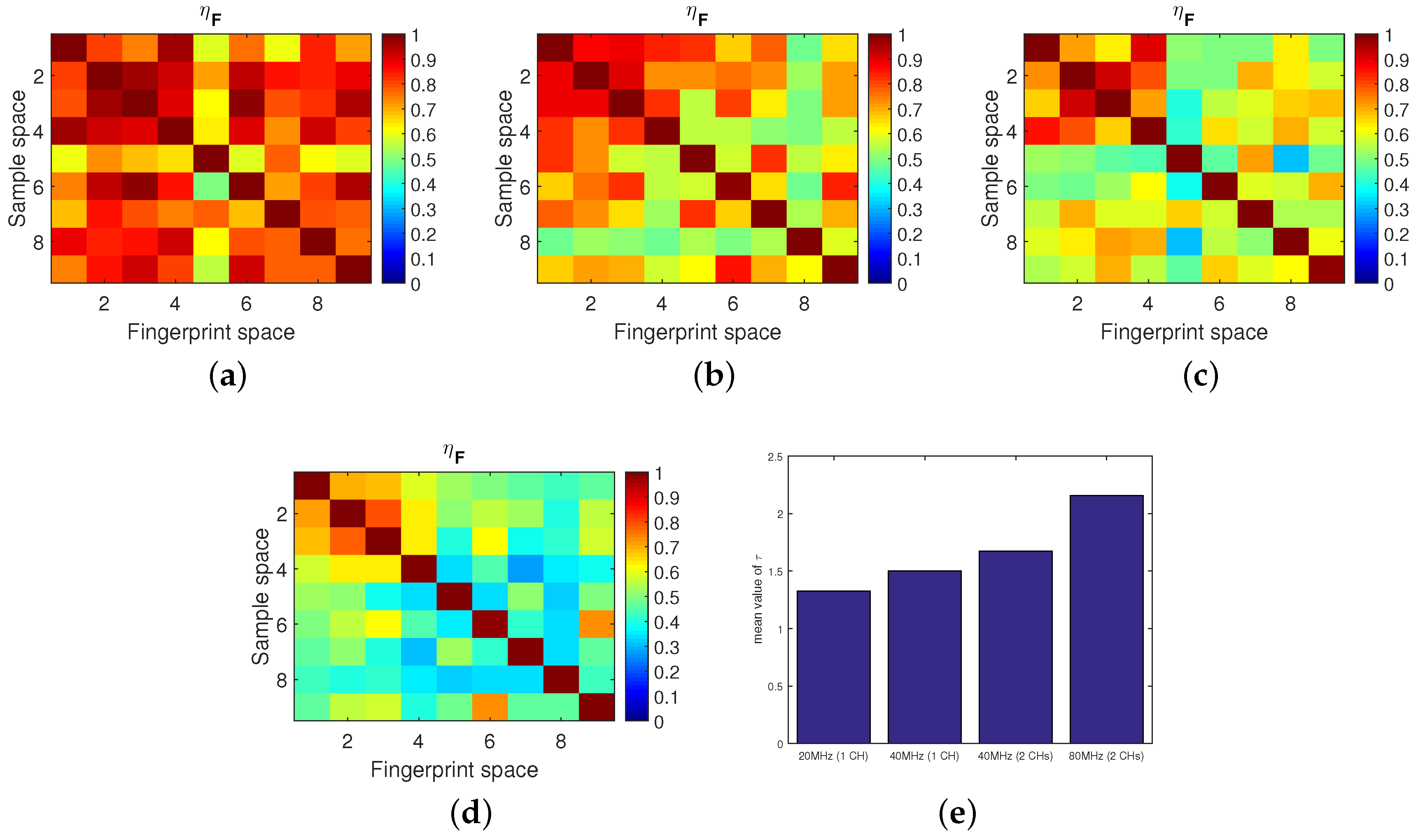
3.1.3. Influence of Bandwidth on TR Based Localization
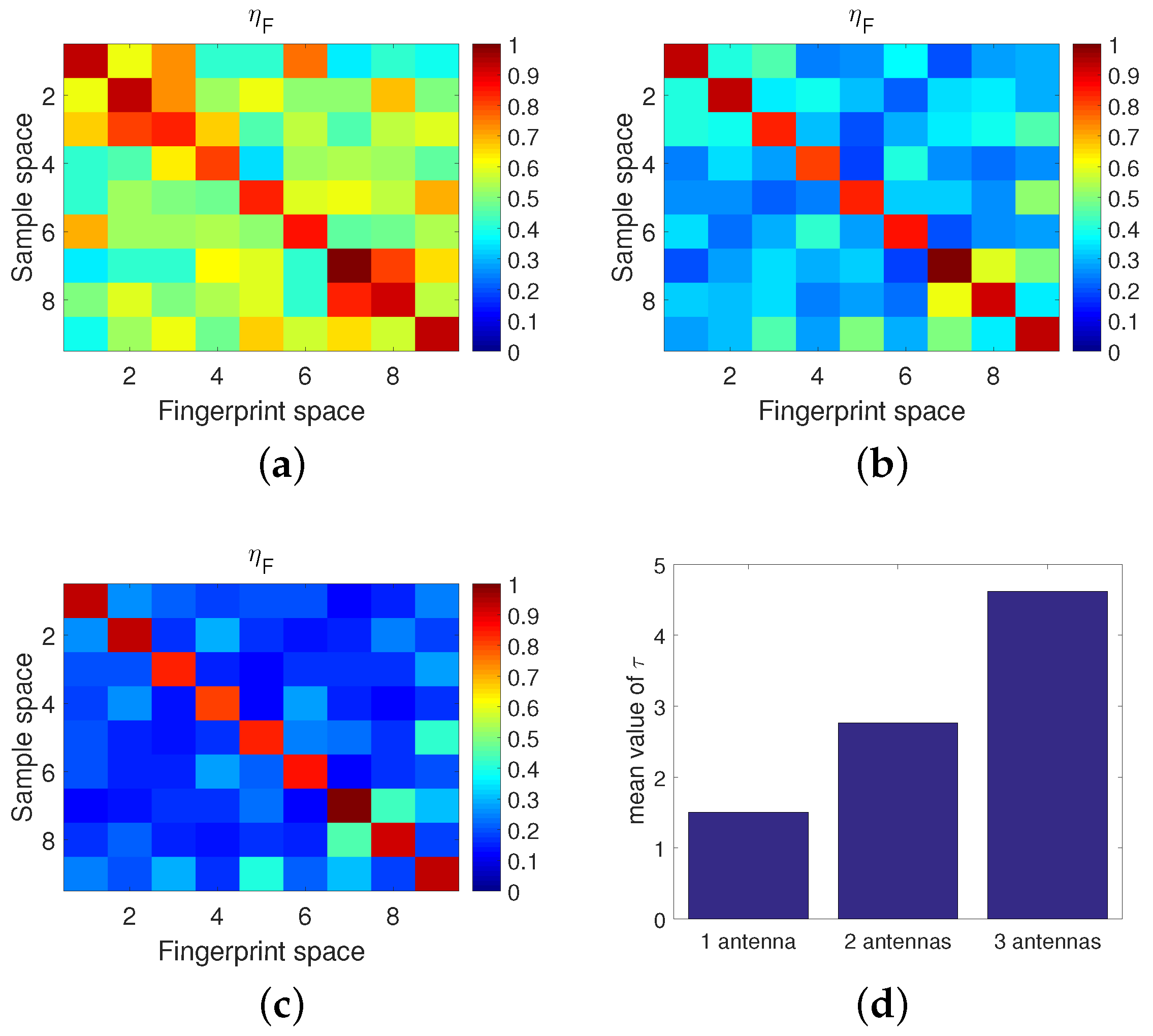
3.1.4. Influence of the Communication Link Number on TR Based Localization
3.2. Evaluation of the Proposed HATRFLA
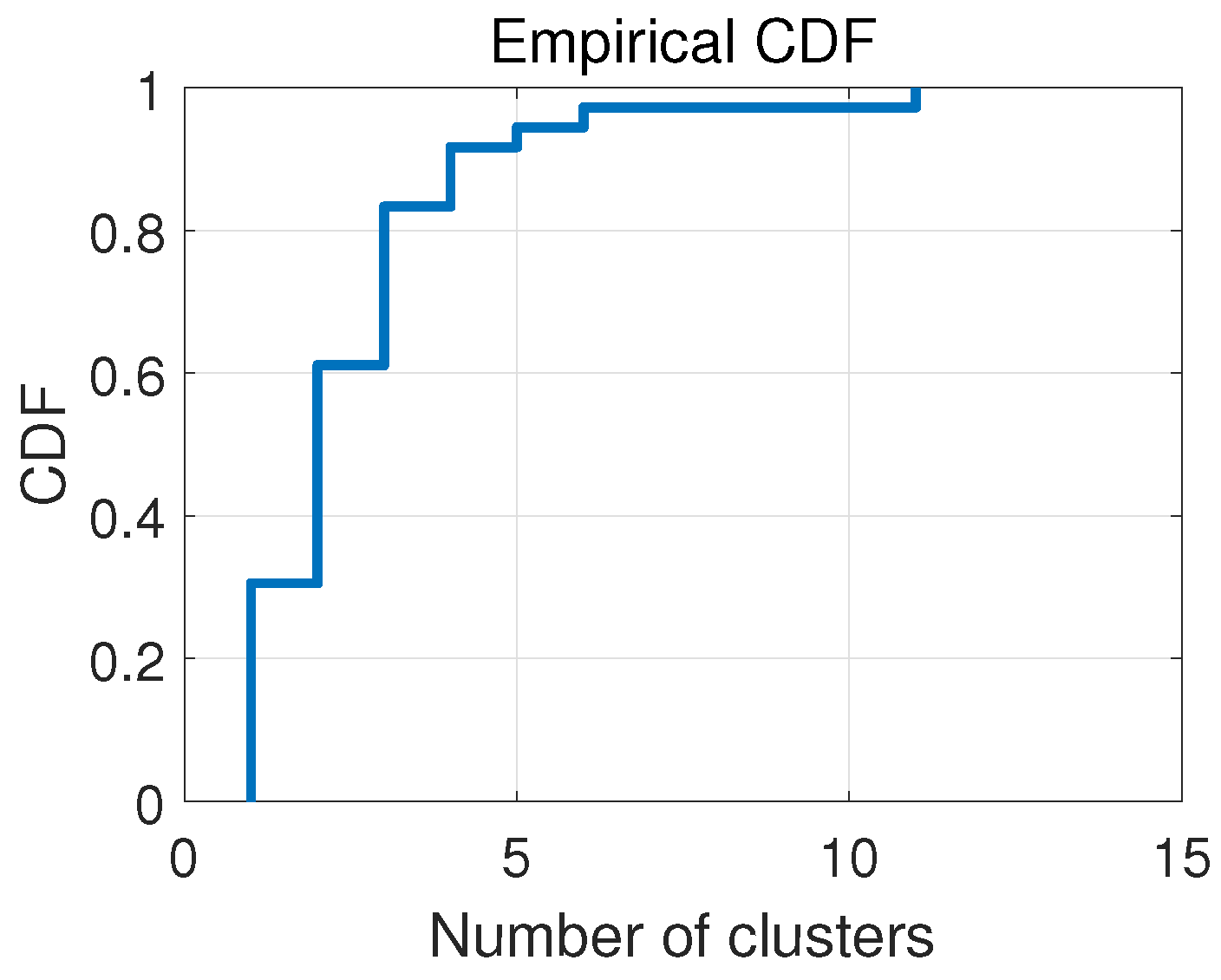
3.2.1. Adaptive Fingerprint Collection
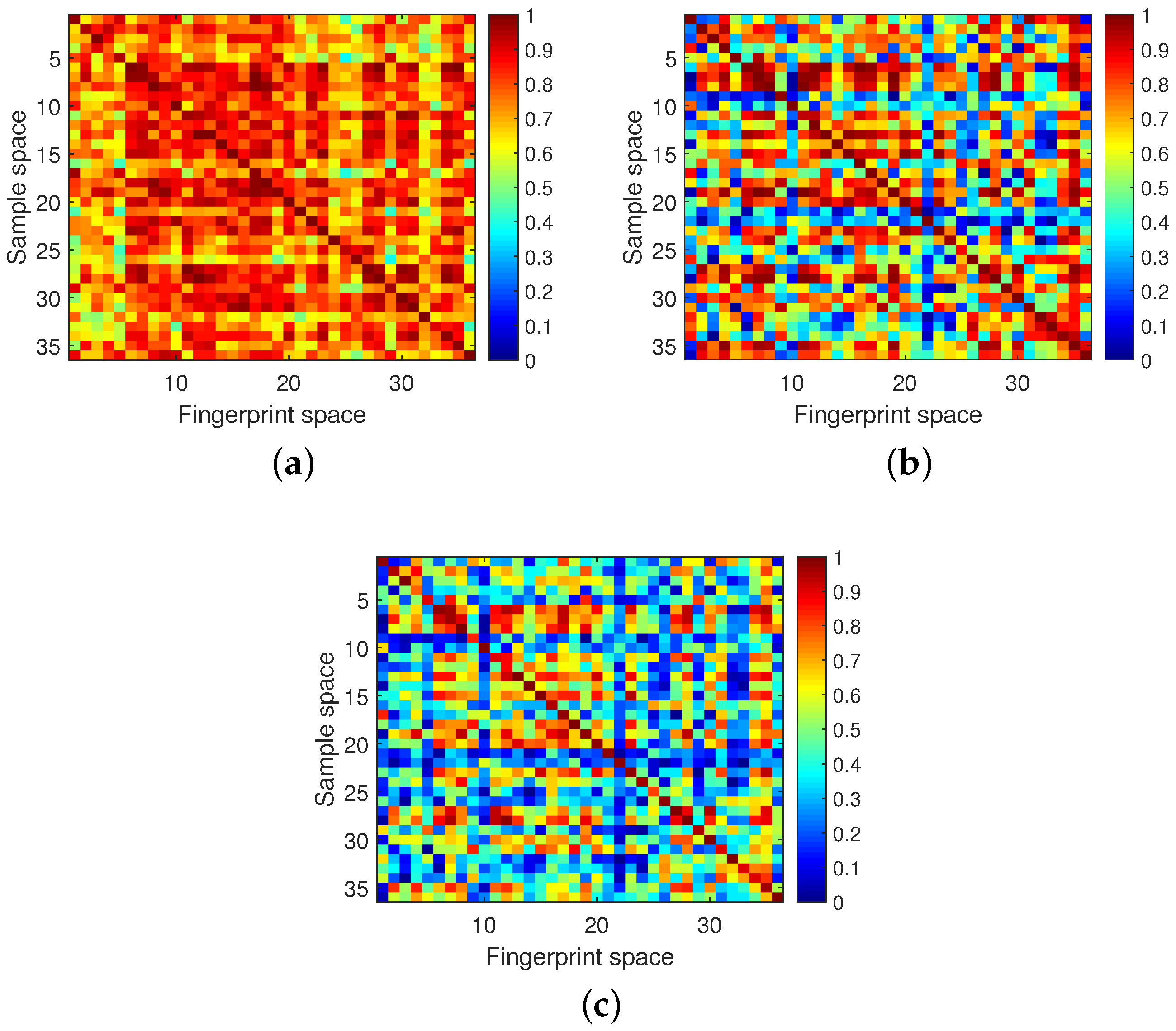
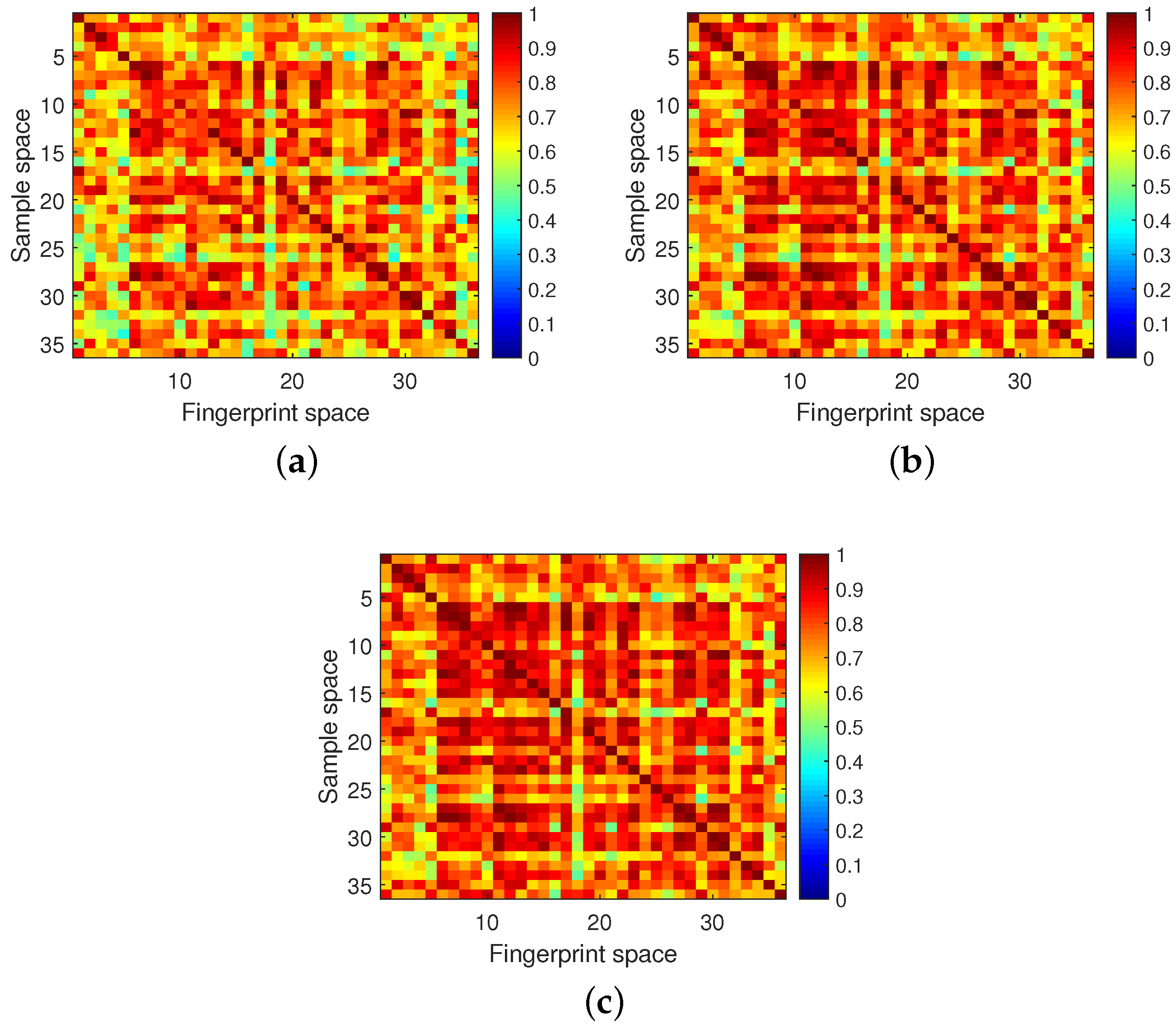
3.2.2. Evaluation of Improved Resonating Strength
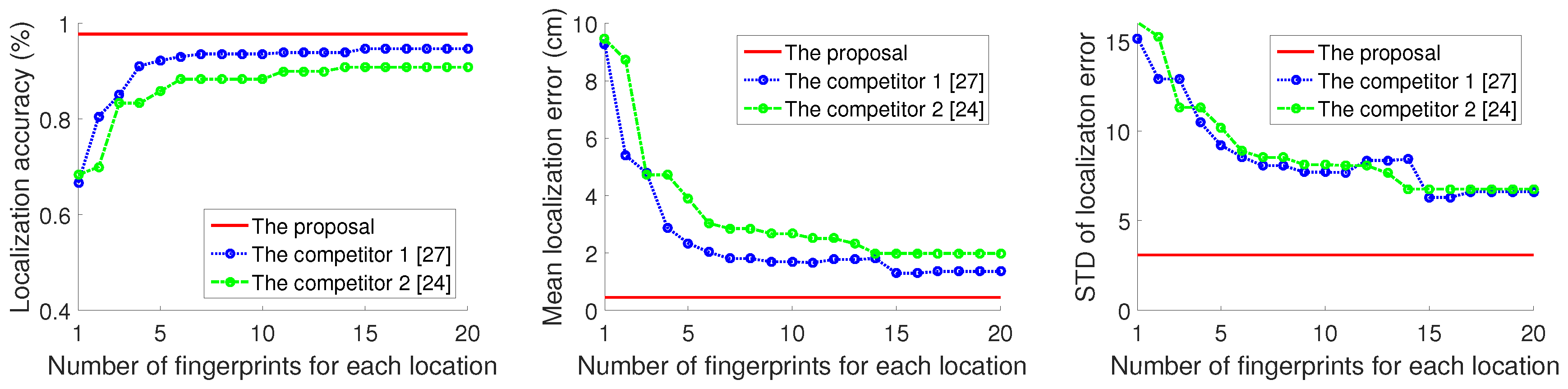
3.2.3. Comparison of Localization Performance
4. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Halpein, D.; Hu, W.; Sheth, A.; Wetherall, D. Tool release: Gathering 802.11n traces with channel state information. In Proceedings of the ACM SIGCOMM Computer Communication Review, New York, NY, USA, 15–19 August 2011; p. 53. [Google Scholar]
- Youssef, M.; Arawala, A. The Horus, location determination system. Wirel. Netw. 2008, 14, 357–374. [Google Scholar] [CrossRef]
- Luo, J.; Fu, L. A smartphone phone indoor localization algorithm based on WLAN location fingerprinting with feature extraction and clustering. Sensors 2017, 17, 1339–1356. [Google Scholar]
- Ren, Y.L.; Salim, F.D.; Tomko, M.; Bai, Y.B. D-Log: A WiFi log-based differential scheme for enhanced indoor localization with single RSSI source and infrequent sampling rate. Pervasive Mob. Comput. 2016, 37, 94–114. [Google Scholar] [CrossRef]
- Wielandt, S.; Strycker, L.D. Indoor multipath assisted angle of arrival localization. Sensors 2017, 17, 2522. [Google Scholar] [CrossRef] [PubMed]
- Xiong, J.; Jamieson, K. ArrayTrack: A fine-grained indoor location system. In Proceedings of the Usenix Conference on Networked Systems Design and Implementation, Lombard, IL, USA, 3–5 April 2013; pp. 71–84. [Google Scholar]
- Yang, Z.; Zhou, Z.M.; Liu, Y.H. From RSSI to CSI: indoor localization via channel response. ACM Comput. Surv. 2013, 46, 25–32. [Google Scholar] [CrossRef]
- Wu, K.S.; Xiao, J.; Yi, Y.W.; Gao, M.; Ni, L.M. FILA: Fine-grained indoor localization. In Proceedings of the IEEE INFOCOM, Orlando, FL, USA, 25–30 March 2012; pp. 2210–2218. [Google Scholar]
- Gui, L.Q.; Yang, M.X.; Yu, H.; Li, J.; Shu, F.; Xiao, F. A Cramer-Rao Lower Bound of CSI-based indoor localization. IEEE Trans. Veh. Technol. 2017, 67, 2814–2818. [Google Scholar] [CrossRef]
- Kotaru, M.; Joshi, K.; Bharadia, D.; Katti, S. SpotFi: Decimeter level localization using wifi. In Proceedings of the 2015 ACM Conference on Special Interest Group on Data Communication, London, UK, 17–21 August 2015; pp. 269–282. [Google Scholar]
- Zhang, Z.Y.; Tian, Z.S.; Zhou, M.; Li, Z.; Wu, Z.P.; Jin, Y. WIPP: Wi-Fi compass for indoor passive positioning with decimeter accuracy. Sensors 2017, 6, 108. [Google Scholar] [CrossRef]
- Tian, Z.S.; Li, Z.; Zhou, M.; Jin, Y.; Wu, Z.P. PILA: Sub-meter localization using CSI from commodity Wi-Fi devices. Sensors 2016, 16, 1664. [Google Scholar] [CrossRef] [PubMed]
- Xiong, J.; Sundaresan, K.; Jamieson, K. ToneTrack: Leveraging frequency-agile radios for time-based indoor wireless localization. In Proceedings of the 21st Annual International Conference on Mobile Computing and Networking (MobiCom), Paris, France, 7–11 September 2015; pp. 537–549. [Google Scholar]
- Xie, Y.X.; Li, Z.J.; Li, M. Precise power delay profiling with commodity WiFi. In Proceedings of the 21st Annual International Conference on Mobile Computing and Networking (MobiCom), Paris, France, 7–11 September 2015; pp. 53–64. [Google Scholar]
- Vasisht, D.; Kumar, S.W.; Katabi, D. Decimeter-level localization with single wifi access point. In Proceedings of the 13th USENIX Symposium on Networked Systems Design and Implementation (NSDI), Santa Clara, CA, USA, 16–18 March 2016; pp. 165–178. [Google Scholar]
- Wu, K.S.; Xiao, J.; Yi, Y.W.; Chen, D.H.; Luo, X.N.; Ni, L.M. CSI-based indoor localization. IEEE Trans. Parallel Distrib. Syst. 2013, 24, 1300–1309. [Google Scholar] [CrossRef]
- Xiao, J.; Wu, K.S.; Yi, Y.W. FIFS: Fine-grained indoor fingerprinting system. In Proceedings of the 2012 21st International Conference on Computer Communications and Networks (ICCCN), Munich, Germany, 30 July–2 August 2012; pp. 1–7. [Google Scholar]
- Chapre, Y.; Ignjatovic, A.; Seneviratne, A.; Jha, S. CSI-MIMO: An efficient Wi-Fi fingerprinting using Channel State Information with MIMO. Pervasive Mob. Comput. 2015, 23, 89–103. [Google Scholar] [CrossRef]
- Wang, X.Y.; Gao, L.J.; Mao, S.W.; Pandey, S. CSI-based fingerprinting for indoor localization: A deep learning approach. IEEE Trans. Veh. Technol. 2017, 66, 763–776. [Google Scholar] [CrossRef]
- Wang, X.Y.; Gao, L.J.; Mao, S.W. CSI phase fingerprinting for indoor localization with a deep learning approach. IEEE Internet Things J. 2017, 3, 1113–1123. [Google Scholar] [CrossRef]
- Wang, X.Y.; Gao, L.J.; Mao, S.W. BiLoc: Bi-model deep learning for indoor localization with commodity 5GHz WiFi. IEEE Access 2017, 5, 4209–4220. [Google Scholar] [CrossRef]
- Fink, M. Time reversal of ultrasonic fields. I basic principles. IEEE Trans. Ultrason 1992, 39, 555–566. [Google Scholar] [CrossRef]
- Wu, Z.H.; Han, Y.; Chen, Y.; Liu, K.J.R. A time-reversal paradigm for indoor positioning system. IEEE Trans. Veh. Tecnol. 2015, 4, 1331–1339. [Google Scholar] [CrossRef]
- Zheng, L.L.; Hu, B.J.; Chen, H.X. A high resolution time-reversal based approach for indoor localization using commodity WiFi devices. In Proceedings of the Forum on Cooperative Positioning and Service, Harbin, China, 19–21 May 2017; pp. 300–304. [Google Scholar]
- Chen, C.; Chen, Y.; Lai, H.Q.; Han, Y.; Liu, K.J.R. High accuracy indoor localization: A wifi-based approach. In Proceedings of the IEEE International Conference on Acoustics (ICASSP), Shangai, China, 20–25 March 2016; pp. 6245–6249. [Google Scholar]
- Chen, C.; Chen, Y.; Han, Y.; Lai, H.Q.; Liu, K.J.R. Achieving centimeter accuracy indoor localization on WiFi platforms: A frequency hopping approach. IEEE Internet Things J. 2017, 4, 122–134. [Google Scholar] [CrossRef]
- Chen, C.; Han, Y.; Chen, Y.; Liu, K.J.R. Indoor global positioning system with centimeter accuracy using Wi-Fi. IEEE Signal Process. Mag. 2016, 33, 128–134. [Google Scholar] [CrossRef]
- IEEE Std. 802.11n-2009: Enhancements for Higher Throughput. Available online: http://www.ieee802.org (accessed on 23 March 2018).
- Sen, S.; Radunovic, B.; Choudhury, R.R.; Minka, T. You are facing the Mona Lisa: Spot localization using PHY layer information. In Proceedings of the 10th International Conference on Mobile Systems (MobiSys), Low Wood Bay, Lake District, UK, 26–28 June 2012; pp. 183–196. [Google Scholar]
- Lloyd, S. Least squares quantization in PCM. IEEE Trans. Inform. Theory 1982, 28, 129–137. [Google Scholar] [CrossRef]
- Ester, M.; Kriegel, H.P.; Sander, J.; Xu, X.W. A density-based algorithm for discovering clusters a density-based algorithm for discovering clusters in large spatial databases with noise. In Proceedings of the Second International Conference on Knowledge Discovery and Data Mining, Portland, OR, USA, 2–4 August 1996; pp. 226–231. [Google Scholar]
- Oestges, C.; Kim, A.D.; Papanicolaou, G.; Paulraj, A.J. Characterization of space-time focusing in time-reversed random fields. IEEE Trans. Antennas Propag. 2005, 53, 283–293. [Google Scholar] [CrossRef]
- Yun, Z.; Iskander, M.F. Time reversal with single antenna systems in indoor multipath environments. In Proceedings of the Antennas and Propagation Society International Symposium IEEE, Albuquerque, NM, USA, 9–14 July 2006; pp. 695–698. [Google Scholar]














© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, L.; Hu, B.; Chen, H. A High Accuracy Time-Reversal Based WiFi Indoor Localization Approach with a Single Antenna. Sensors 2018, 18, 3437. https://doi.org/10.3390/s18103437
Zheng L, Hu B, Chen H. A High Accuracy Time-Reversal Based WiFi Indoor Localization Approach with a Single Antenna. Sensors. 2018; 18(10):3437. https://doi.org/10.3390/s18103437
Chicago/Turabian StyleZheng, Lili, Binjie Hu, and Haoxiang Chen. 2018. "A High Accuracy Time-Reversal Based WiFi Indoor Localization Approach with a Single Antenna" Sensors 18, no. 10: 3437. https://doi.org/10.3390/s18103437
APA StyleZheng, L., Hu, B., & Chen, H. (2018). A High Accuracy Time-Reversal Based WiFi Indoor Localization Approach with a Single Antenna. Sensors, 18(10), 3437. https://doi.org/10.3390/s18103437