1. Introduction
An increasing world population and climate change have placed a considerable amount of pressure on global freshwater supplies [
1]. Irrigated agriculture is the world’s largest consumptive user of fresh water, accounting for over 70% of its global use [
2]. It is therefore important to develop technologies which enable sustainable and efficient water use for irrigated agriculture while obtaining a healthy plant growth.
It is desirable to irrigate to meet specific plant water demands at the right time while avoiding over and under irrigation. This usually involves irrigation scheduling and control operations on an hourly or daily basis for a time period of usually less than a week [
3]. Precision irrigation aims to accurately determine and quantify plant water needs. The irrigation amount and timing is based on measurements of soil, plant, and climatic variables from which the plant water need is inferred [
4]. Precision irrigation has been shown to improve water use efficiency, reduce energy consumption, and enhance crop productivity by leveraging advances in sensor, control, and modelling technologies [
5,
6,
7,
8]. Such advances include the development of energy efficient and fault-tolerant wireless sensor networks [
9,
10], intelligent proximal sensing for the detection of plant water stress [
11,
12,
13], and variable rate irrigation systems [
6,
14,
15].
The temporal dynamics of field-scale soil moisture is perhaps the most leveraged tool for irrigation scheduling. This is because the soil moisture status is indicative of the water available for uptake by crops [
16]. A number of irrigation scheduling methods estimate crop water needs using soil moisture and climatic data, and rules created by expert agronomists. Most of the commercial automated irrigation systems are programmed to irrigate at specific time intervals and apply a fixed irrigation volume. A number of these systems are also programmed to irrigate after a predefined soil moisture threshold is reached [
17]. Due to their open-loop structure, these methods may not guarantee optimum irrigation scheduling decisions resulting in suboptimal plant health and efficiency in water use [
18]. These shortcomings can be alleviated with the use of feedback control where sensor feedback is employed in optimizing irrigation timing and volume [
19]. Although these approaches improve irrigation scheduling decisions, they do not include a model for the process dynamics; as a result, the overall system may not be robust to external perturbations [
20].
Model-based irrigation scheduling systems consist of a calibrated internal model which employs feedback from soil, plant, and climatic sensors in order to predict crop water needs [
20]. McCarthy et al. [
21] implemented a model-based control system for predicting the irrigation requirements of cotton with an objective of maximizing crop yield. Their system relied on a complex crop model which requires detailed information on various climatic, soil and crop parameters. Park et al. [
20] developed a model predictive control system for center pivot irrigation which used measured soil and climatic data to calibrate a complex soil-water model. The use of mechanistic models in these systems has many practical limitations because they are data demanding and require time-consuming calibrations during model development.
In recent years, many studies have investigated the applicability of data-driven machine learning models to irrigation decision support. Navarro-Hellín et al. [
22] presented a regression model applied in predicting the weekly irrigation needs of a plantation using climatic and soil data as inputs. Giusti and Marsili-Libelli [
23] applied a fuzzy decision system in predicting the volumetric soil moisture content based on local weather data. King and Shellie [
24] used neural network modelling to estimate the lower threshold (
) needed to calculate the crop water stress index for wine grapes. Delgoda et al. [
25] applied a system identification model in predicting the soil moisture deficit using climatic and soil moisture data as model inputs. These statistical methods explore the spatial and temporal patterns hidden in historical data in order to map input data to an output space. They do not rely on a physical model of the system as they are data-driven (i.e., they learn from data). In many cases, these machine learning methods have been shown to achieve a good prediction performance [
26]. They also have fewer data requirements when compared to mechanistic models [
24,
27,
28].
For real-time irrigation scheduling, a model which is able to predict the soil moisture dynamics is desirable [
18]. In order to achieve this with traditional machine learning and system identification methods, an extensive physical knowledge of vadose zone hydrology and boundary layer meteorology is required to derive robust input features from soil and climatic data. This is because of the complex nonlinear relationship between the climatic parameters, soil hydraulic properties, and the soil moisture dynamics [
29]. Lozoya et al. [
30], Delgoa et al. [
25], Giusti and Marsili-Libelli [
23], and Saleem et al. [
31] presented system identification models for the prediction of soil moisture dynamics, which are parameterized based on the soil water balance method. This involved assumptions relating to the absence of surface run-off and deep percolation. The estimated evapotranspiration was also used as an input to the models. In practice, the true crop evapotranspiration may be significantly different from the estimated values. Furthermore, these models are only applicable to the site for which they are developed limiting their use for a different environment. This is because models developed using traditional machine learning and system identification approaches are mostly only applicable to the environment for which they were developed [
22].
Machine learning approaches such as support vector machines (SVMs) and adaptive neuro-fuzzy inference systems (ANFIS) are another group of models that have been applied for the prediction of soil moisture dynamics [
26,
32,
33,
34]. These approaches have good prediction capability and limited input requirements. Karandish and Šimůnek [
26] compared various machine learning models including ANFIS and SVM for simulating the time series of soil moisture content using meteorological, precipitation, and crop coefficient data as model input. The authors reported that the models achieved a prediction performance comparable to that of a mechanistic physical process-based model: HYDRUS–2D. However, they noted that these machine learning models are not suitable for the entire range of soil moisture prediction i.e., water stress conditions. It is therefore evident that robust and scalable data-driven models need to be developed for irrigation scheduling applications.
Neural network (NN) methods have a strong learning ability and are able to represent the nonlinear relationship between the inputs and outputs of a system [
35]. Some specific applications of neural networks to irrigation and water resource management include the prediction of soil moisture to aid irrigation scheduling [
35,
36], crop yield prediction [
37,
38], prediction of irrigation water demand [
39,
40], rainfall-runoff modelling [
41,
42] and groundwater modelling [
43,
44].
An NN method is applied in this study for predicting the soil moisture dynamics because of their ability to produce robust functions approximating complex processes [
45]. However, traditional feedforward neural networks (FFNNs) have limited ability to model dynamic data because they are unable to preserve previous information, resulting in suboptimal predictions when they are applied in modelling highly causal systems [
46]. The learning capability of FFNNs can be improved through additional pre-processing of dynamic data and combining the FFNN with other methods including genetic algorithms [
47] and fuzzy logic [
36]. For example, Pulido-Calvo and Gutiérrez-Estrada [
40] applied a hybrid FFNN model to generate a one-day-ahead forecast of daily irrigation water demand. The forecast produced by the FFNN was corrected via a fuzzy logic approach whose parameters were adjusted using genetic algorithms. While this sort of hybrid modelling approach can strengthen the ability of an FFNN to learn dynamic data, the long-term generalization ability of such models is limited due to the ad hoc nature of fuzzy logic rules. Furthermore, the methods that employ additional pre-processing of dynamic data are time-consuming because of the extensive time and frequency domain computations they rely on. The data pre-processing steps also rely on subjective user intervention, which limits the scalability of the models to new environments.
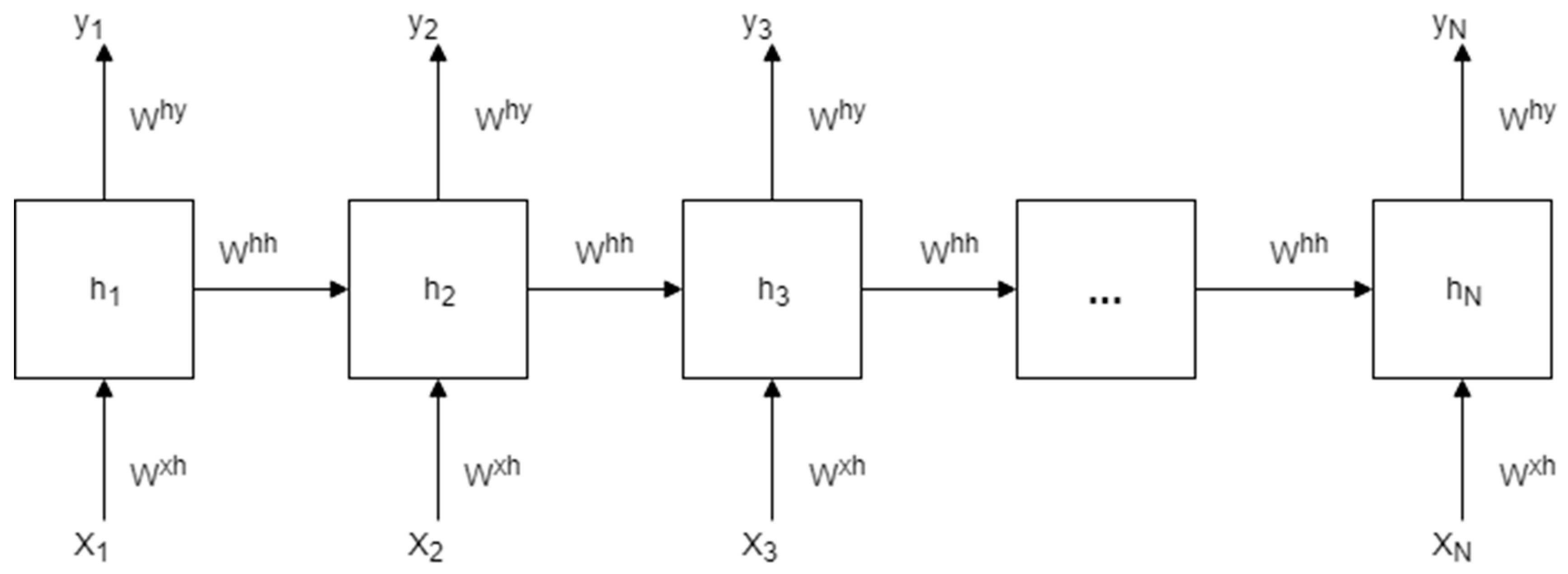
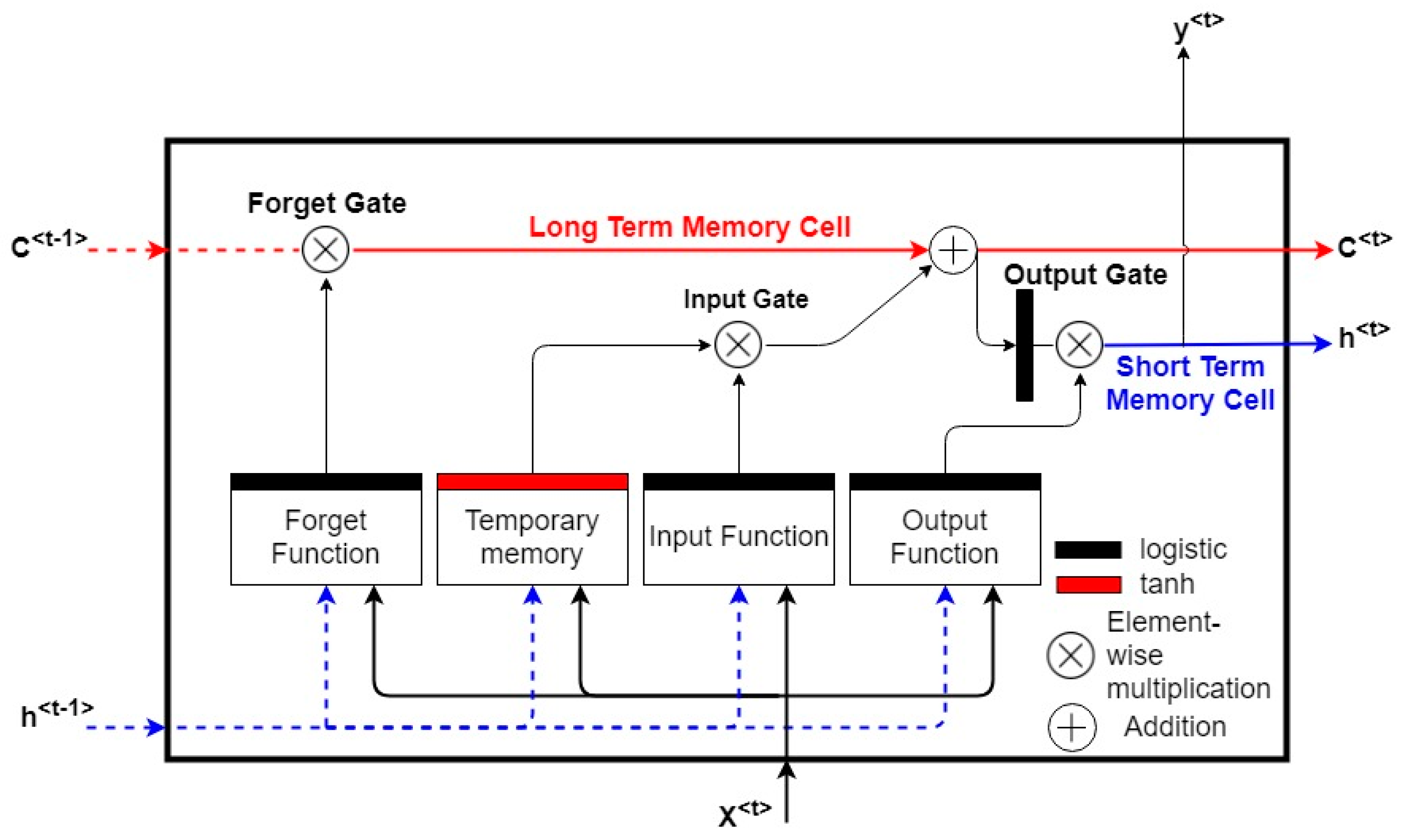
This present study focuses on a dynamic modelling task, for which the Recurrent Neural Network (RNN) presents a suitable solution. An RNN has internal self-looped cells, allowing it to preserve information from previous time steps [
48]. The Long Short-Term Memory Network (LSTM), a class of RNNs was selected for this study because of its successful application in the control of nonlinear dynamic systems [
49,
50]. The LSTM requires minimal input data pre-processing and is able to preserve useful information across multiple time steps [
51]. They have been shown to achieve robust performance in modelling sequential data in fields such as natural language processing [
52], time series classification of chaotic systems [
53], and speech recognition [
54]. Zhang et al. [
55] demonstrated a hydrological application of LSTM models for the prediction of water table depth. Time series data on water diversion, evaporation, precipitation and temperature were applied as inputs to the model. The authors reported
scores ranging between 0.789 and 0.952 for the LSTM models, largely outperforming FFNN models which achieved a maximum
score of 0.495. The robust water table depth prediction achieved by the LSTM models highlights their ability to preserve and learn previous information from long-term time series data typical of hydrological application. This ability is particularly desirable in soil moisture based irrigation scheduling where the present soil moisture content is dependent on past soil moisture, precipitation, and climatic data.
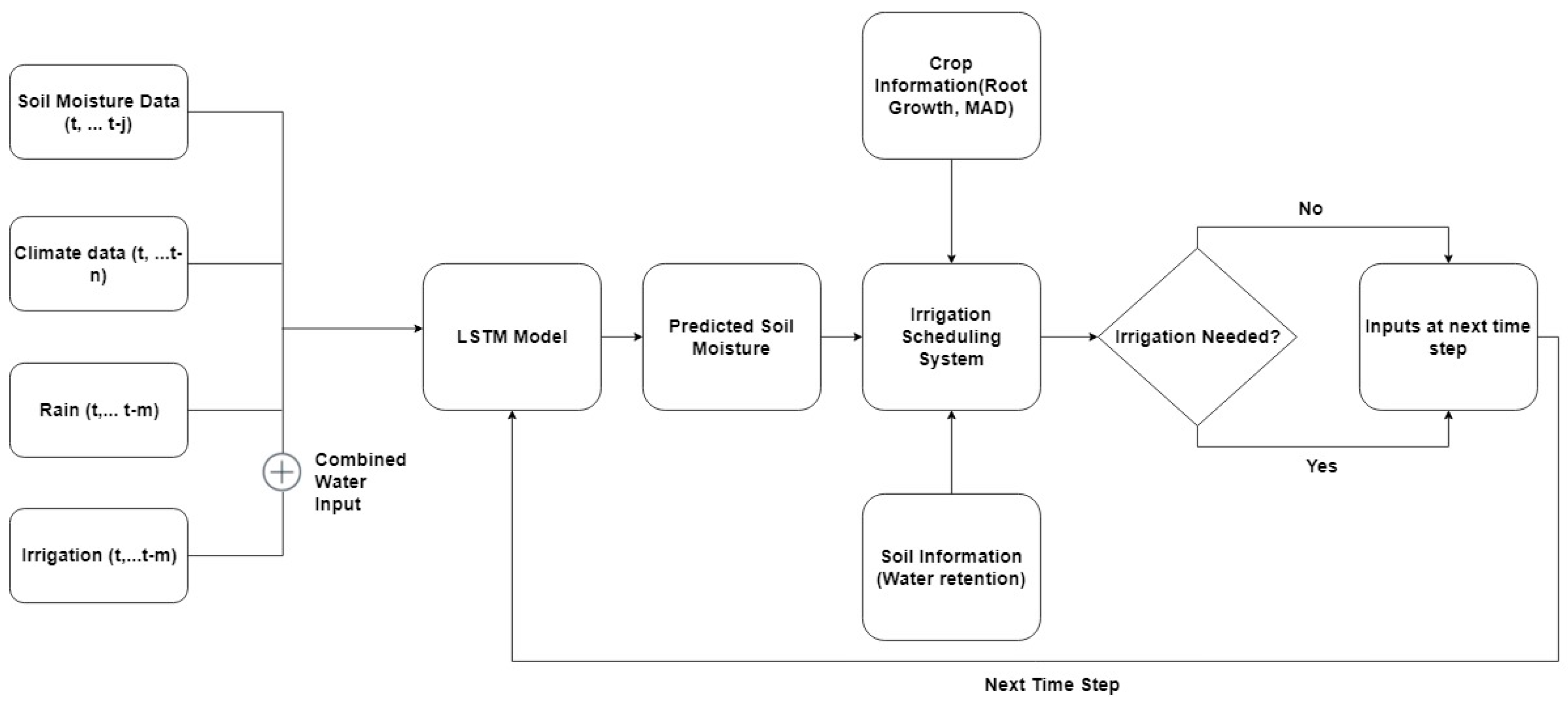
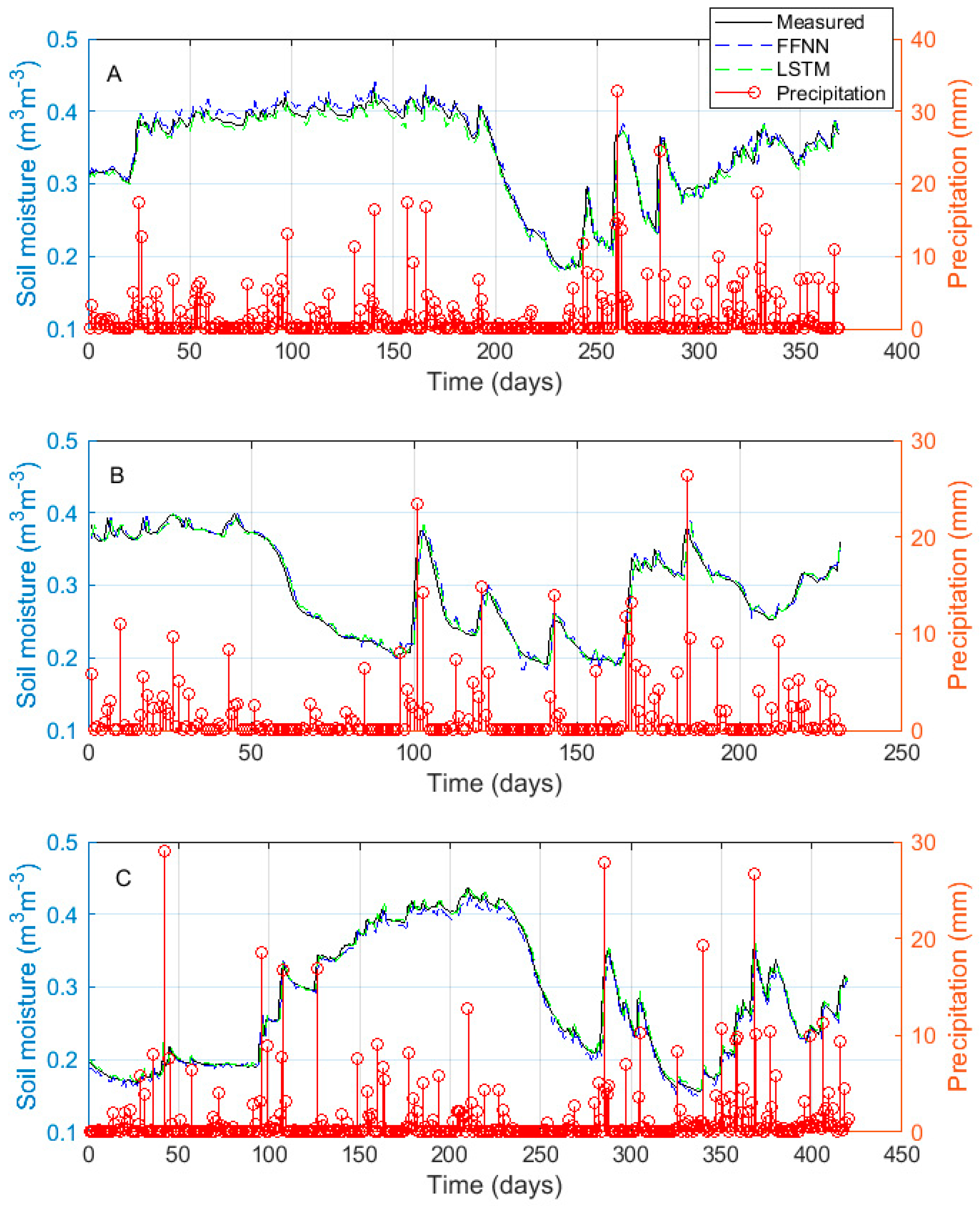
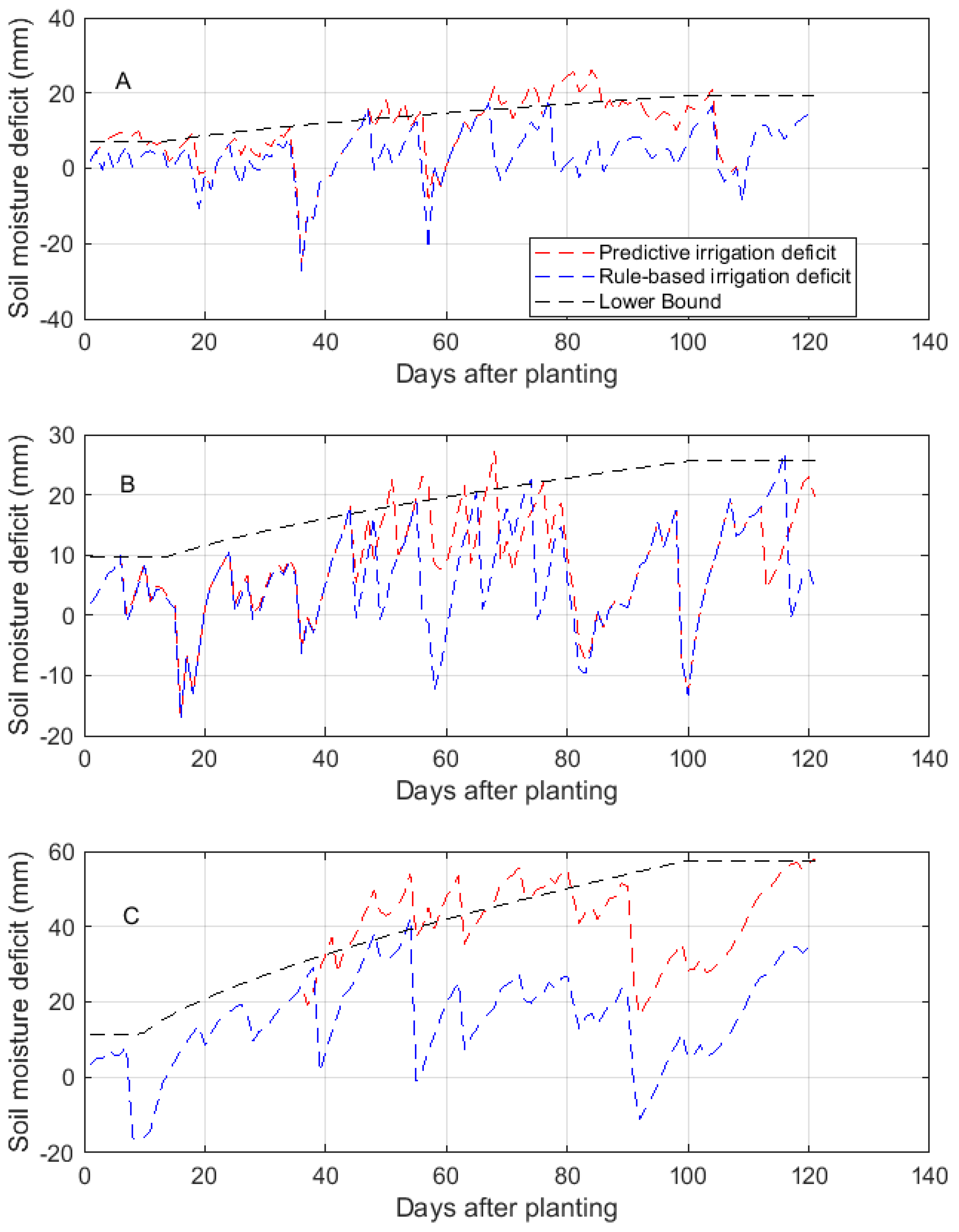
The objective of this study was to develop LSTM models for the prediction of volumetric soil moisture content for three sites with different soil characteristics. Performance of the LSTM models was evaluated by comparing the LSTM predicted soil moisture content with measured soil moisture content and estimated soil moisture content using traditional feedforward neural networks (FFNNs). The applicability of the LSTM models for prediction in sites not used in model training was also investigated. Finally, the application of the LSTM models in predictive irrigation scheduling was demonstrated using model-based simulations of the potato-growing season.
The rest of the paper is structured as follows. In
Section 2, the theoretical background of neural networks is presented. In
Section 3, the methodology employed for the study is presented.
Section 4 shows the performance evaluation of the neural network models and the predictive irrigation scheduling system. In
Section 5, conclusions and recommendations for future work are presented.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}