Adaptive Ship Detection for Single-Look Complex SAR Images Based on SVWIE-Noncircularity Decomposition

Abstract
1. Introduction
2. The Proposed Method
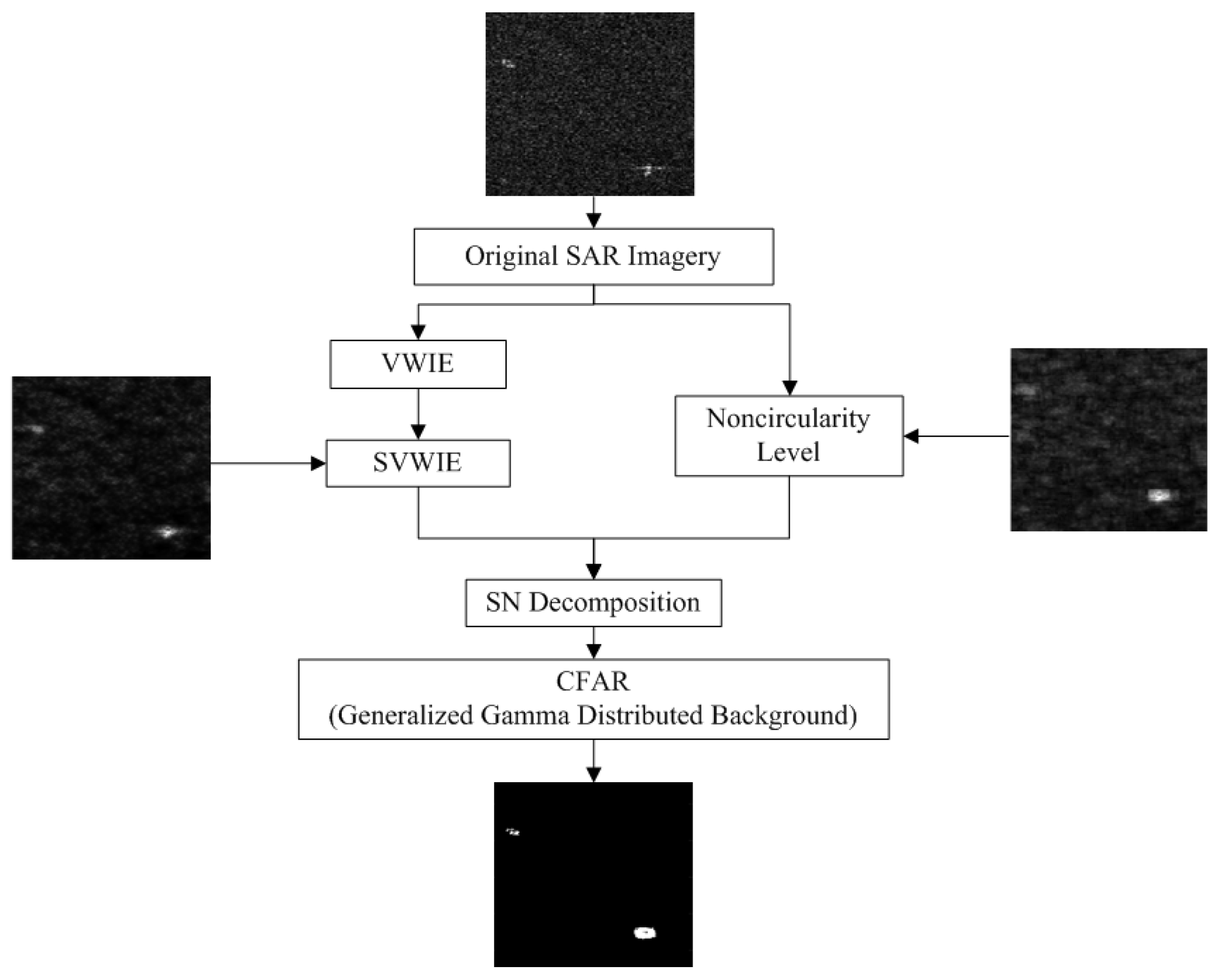
2.1. Algorithm Overview
- For the first time, noncircularity level is adopted in ship detection, which makes use of phase information and is effective for reducing the interference of strong backscattering;
- The SVWIE is proposed, which can further strengthen ships and suppress clutter;
- The h detector is developed based on a novel SN decomposition to extract ships from complex background;
- Lastly, the comprehensive ship detection framework for complex background has been designed.
2.2. Why Should We Take Noncircularity into Account for Ship Detection?
2.2.1. Noncircularity
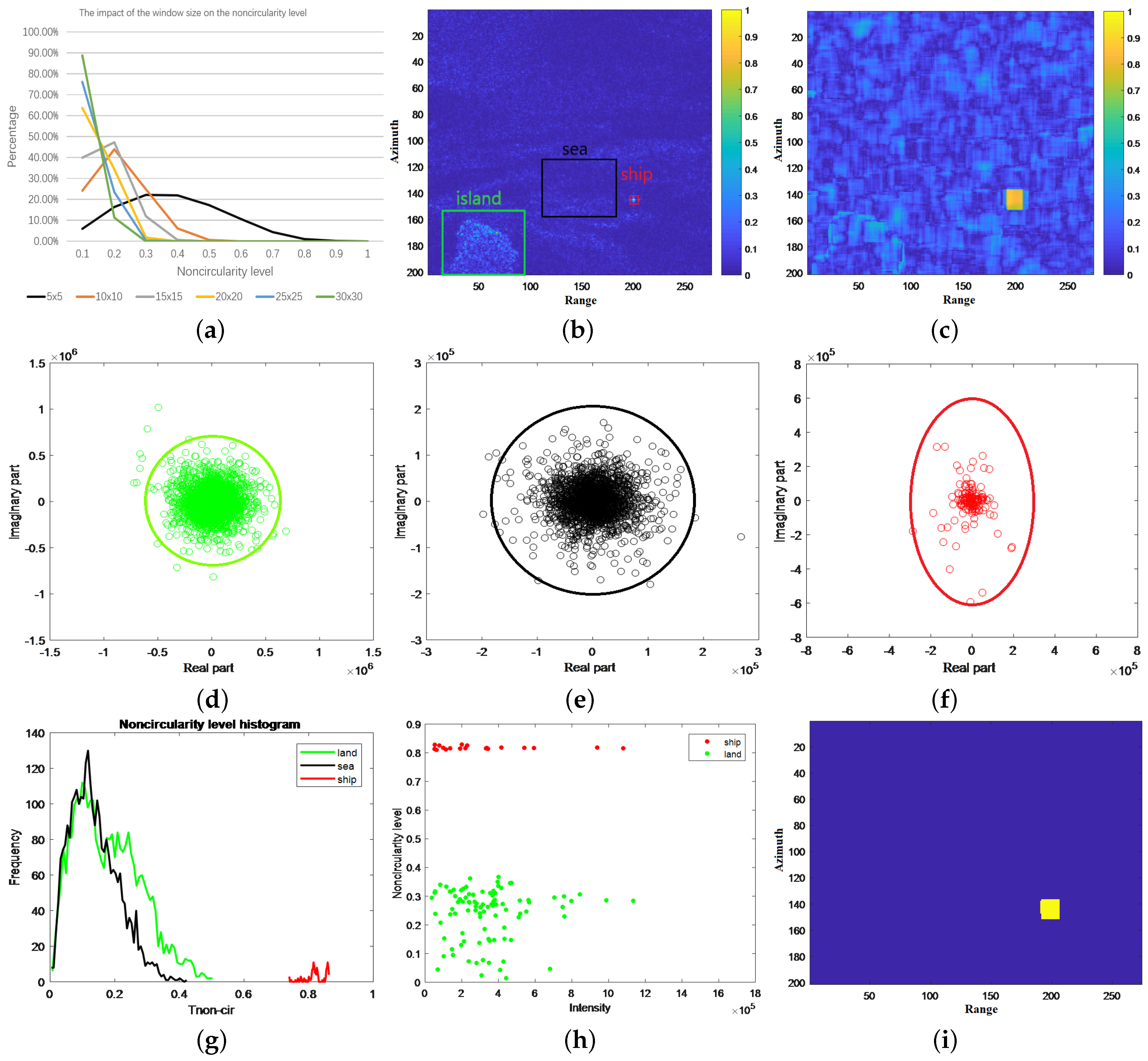
2.2.2. The Effectiveness of Noncircularity
- Although the island and sea regions have different backscattering, of them is almost the same. Besides, although the ship and island regions have almost the same backscattering, of them has great difference. Thus, can help to distinguish ships from complex background when the background has almost the same backscattering as ships, which is difficult to be done only by the image intensity.
- of ship region does not definitely equal 1 and of island/sea regions does not absolutely equal 0. Therefore, is not always a perfect parameter to extract ship regions and needs modification.
- Since the calculation of needs window sliding, image turns out to be rectangular and the ship region would be enlarged a bit depending on the window size.
2.2.3. Further Consideration of Noncircularity
2.3. Similarity Variance Weighted Information Entropy (SVWIE)
2.4. SVWIE-Noncircularity Decomposition
2.5. Adaptive Thresholding
3. Experiments and Results
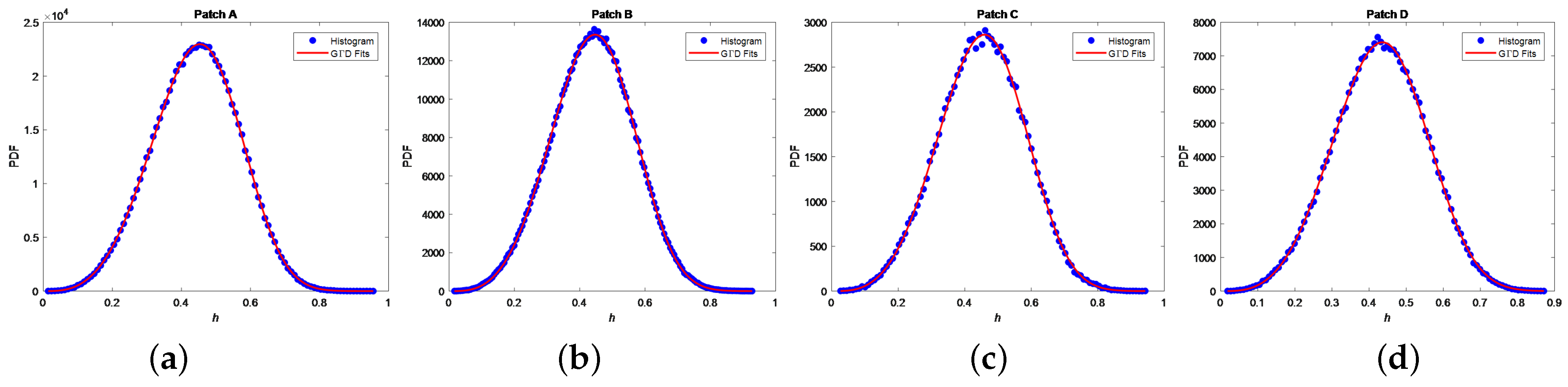
3.1. The Effectiveness of GD for h Detector
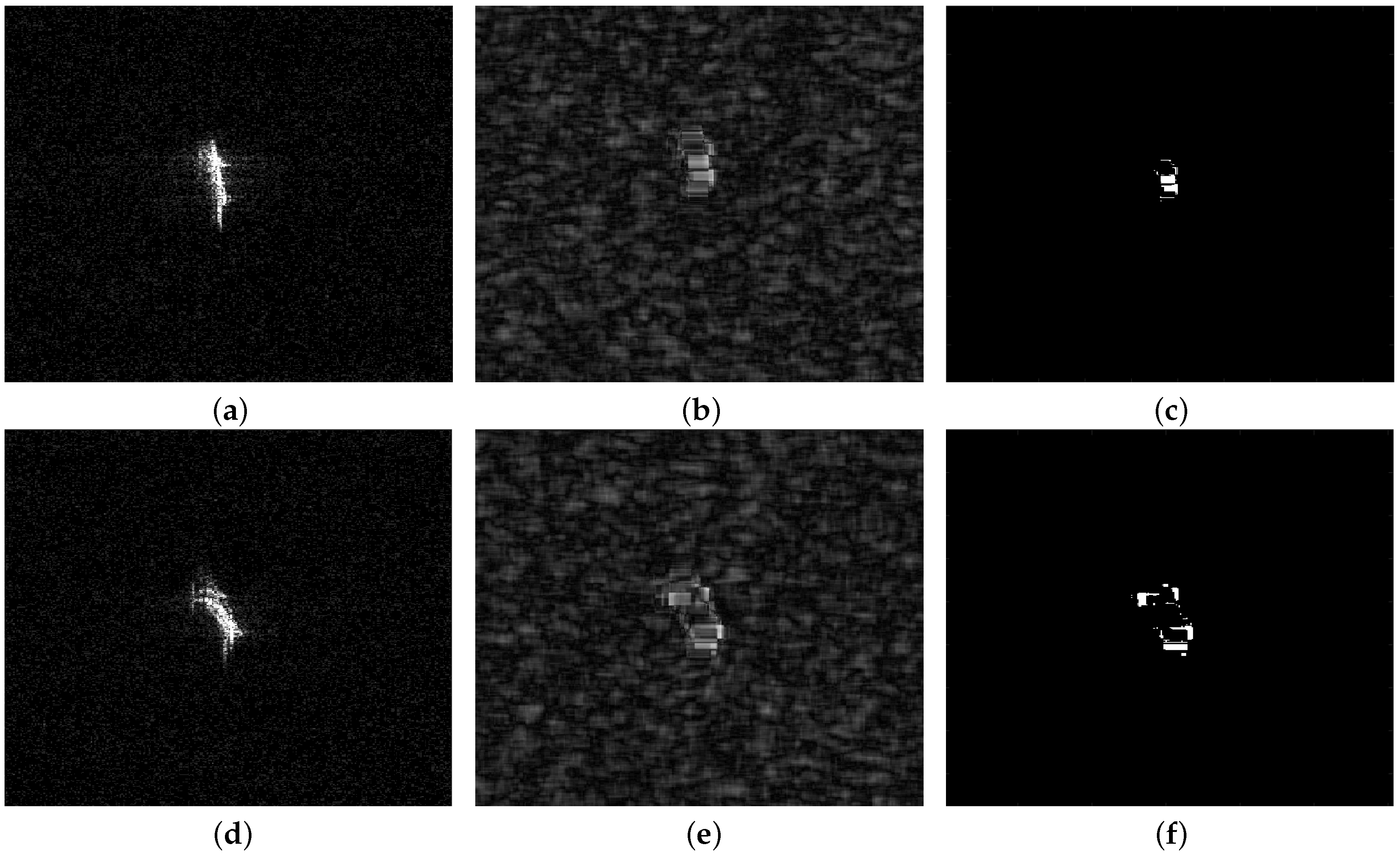
3.2. The Effectiveness of h Detector
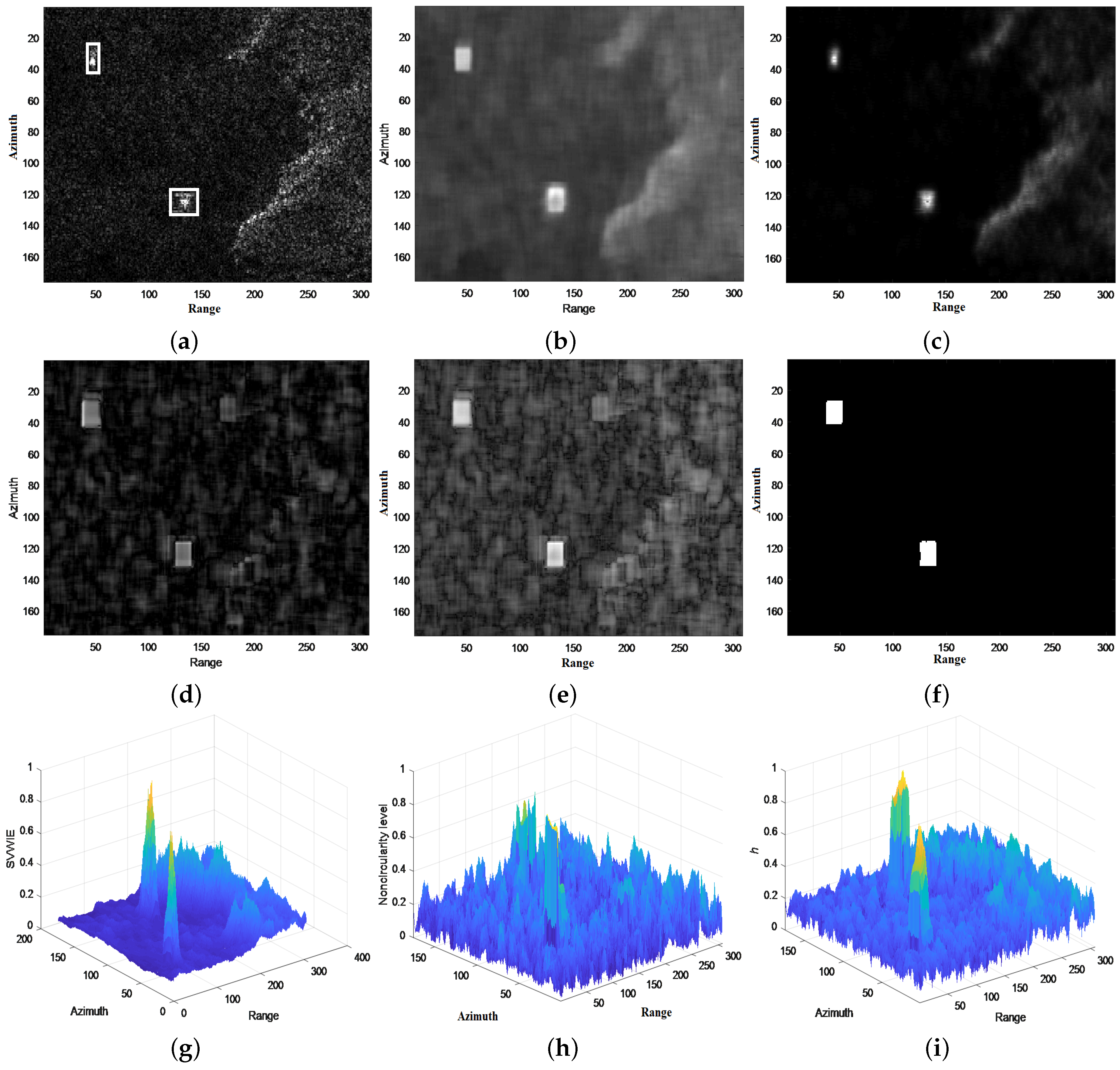
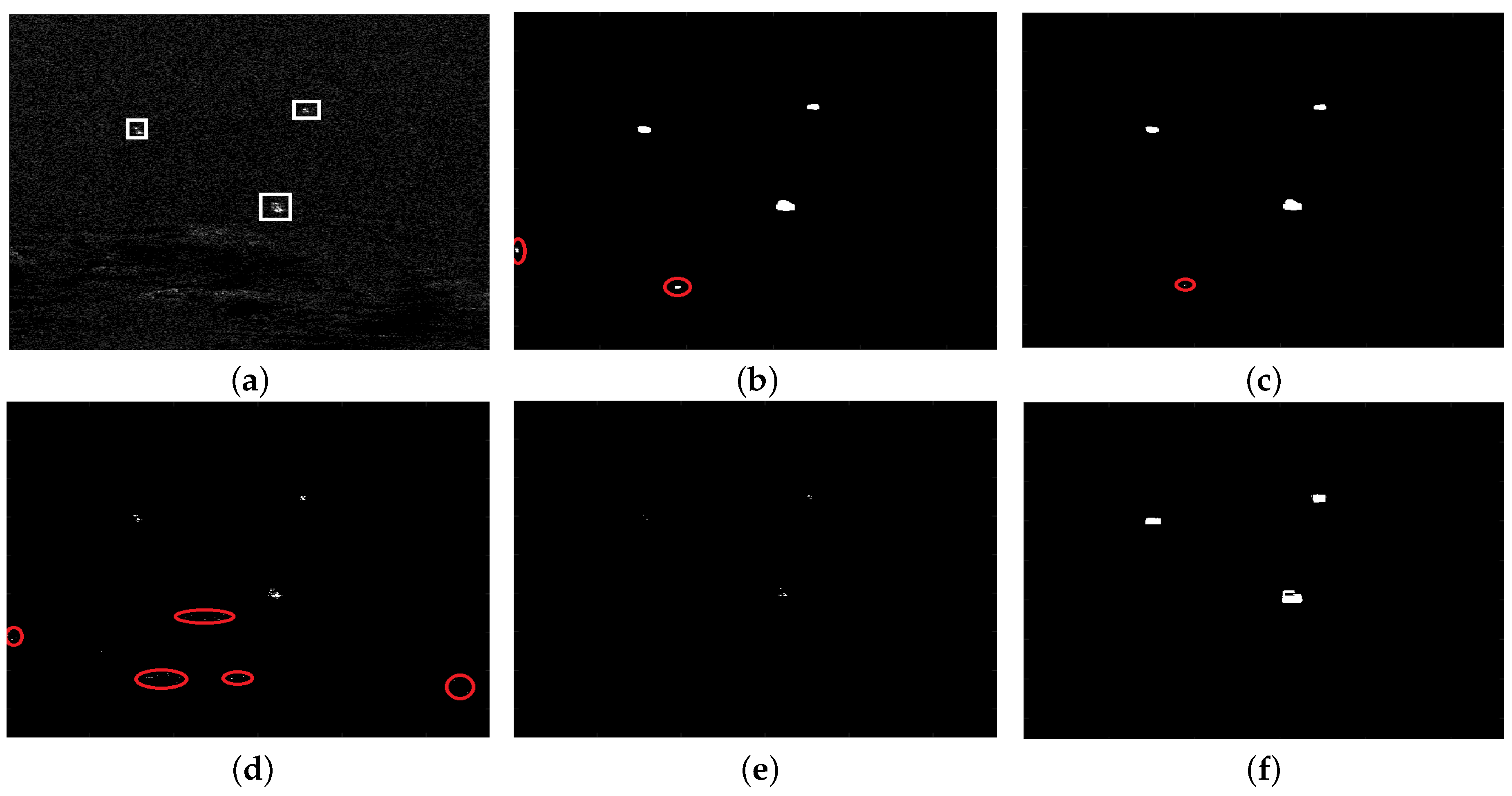
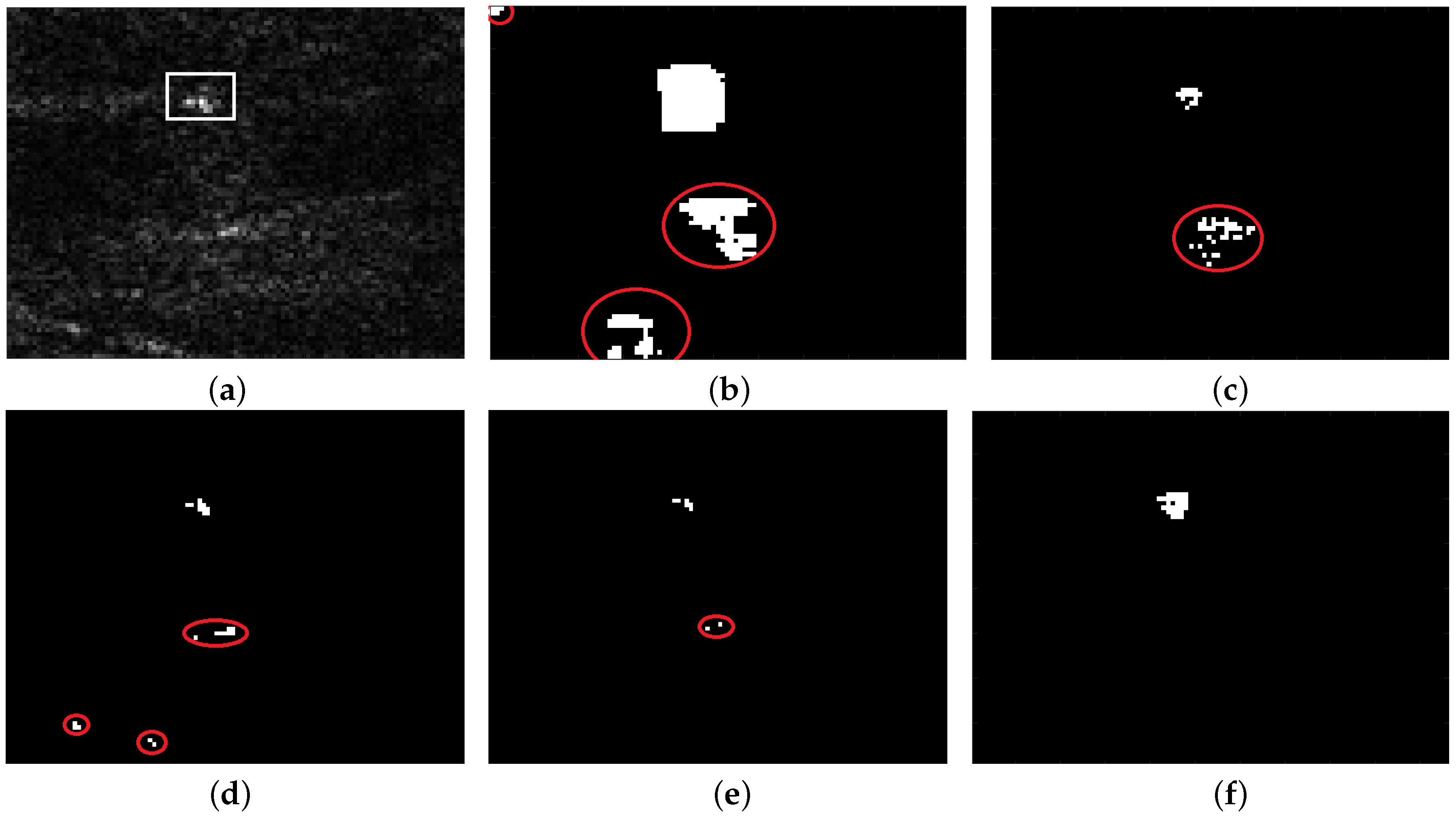
- SVWIE works better at suppressing clutter than VWIE, as shown in Figure 6b,c.
- h detector is effective for reducing clutter and detecting ships, as shown Figure 6e,f, as it combines advantages of SVWIE and noncircularity.
- Compared to ships in Figure 6a, the ships in h image would be enlarged a bit because of window sliding. Solving this problem will be included in our future work.
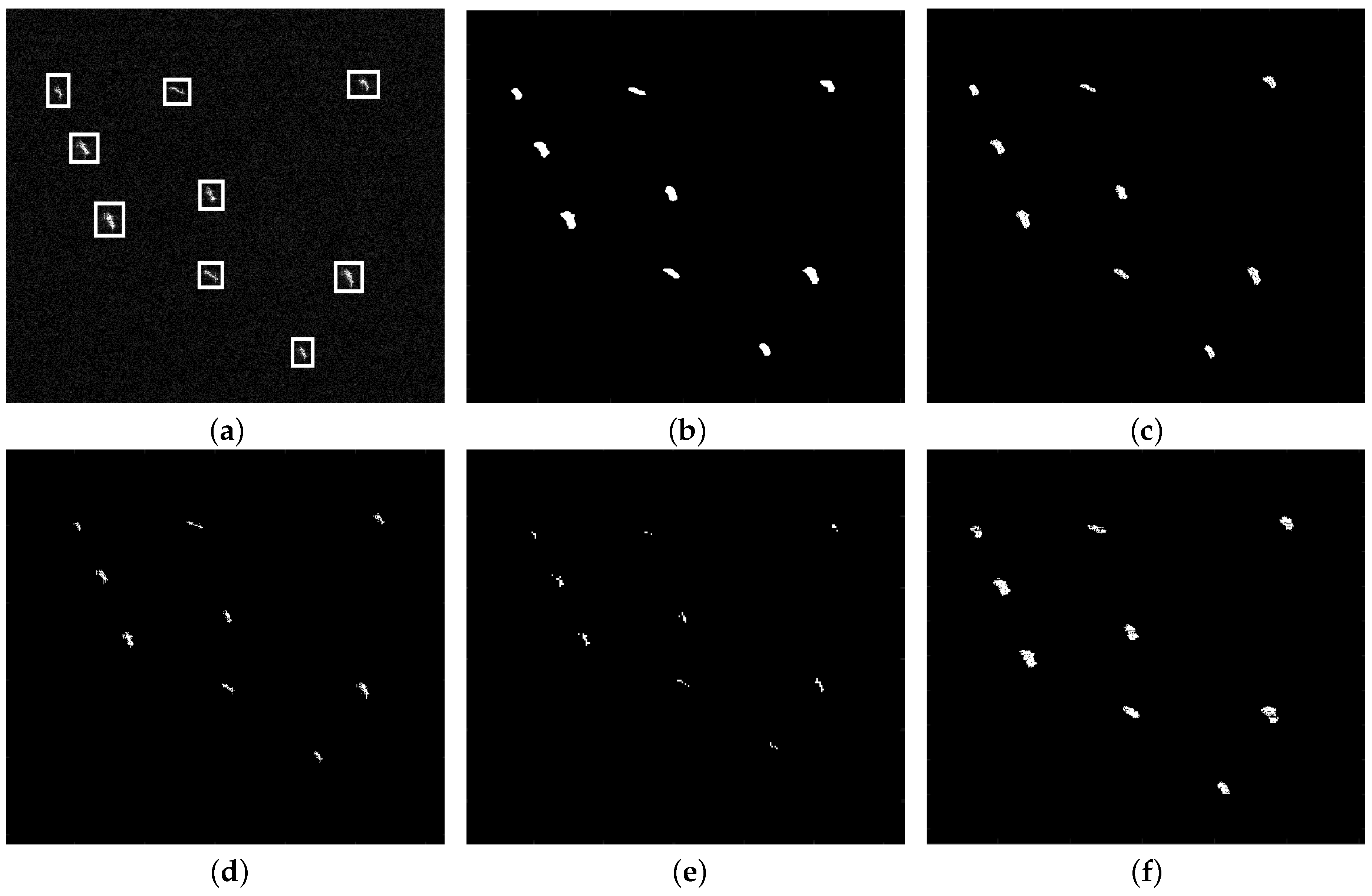
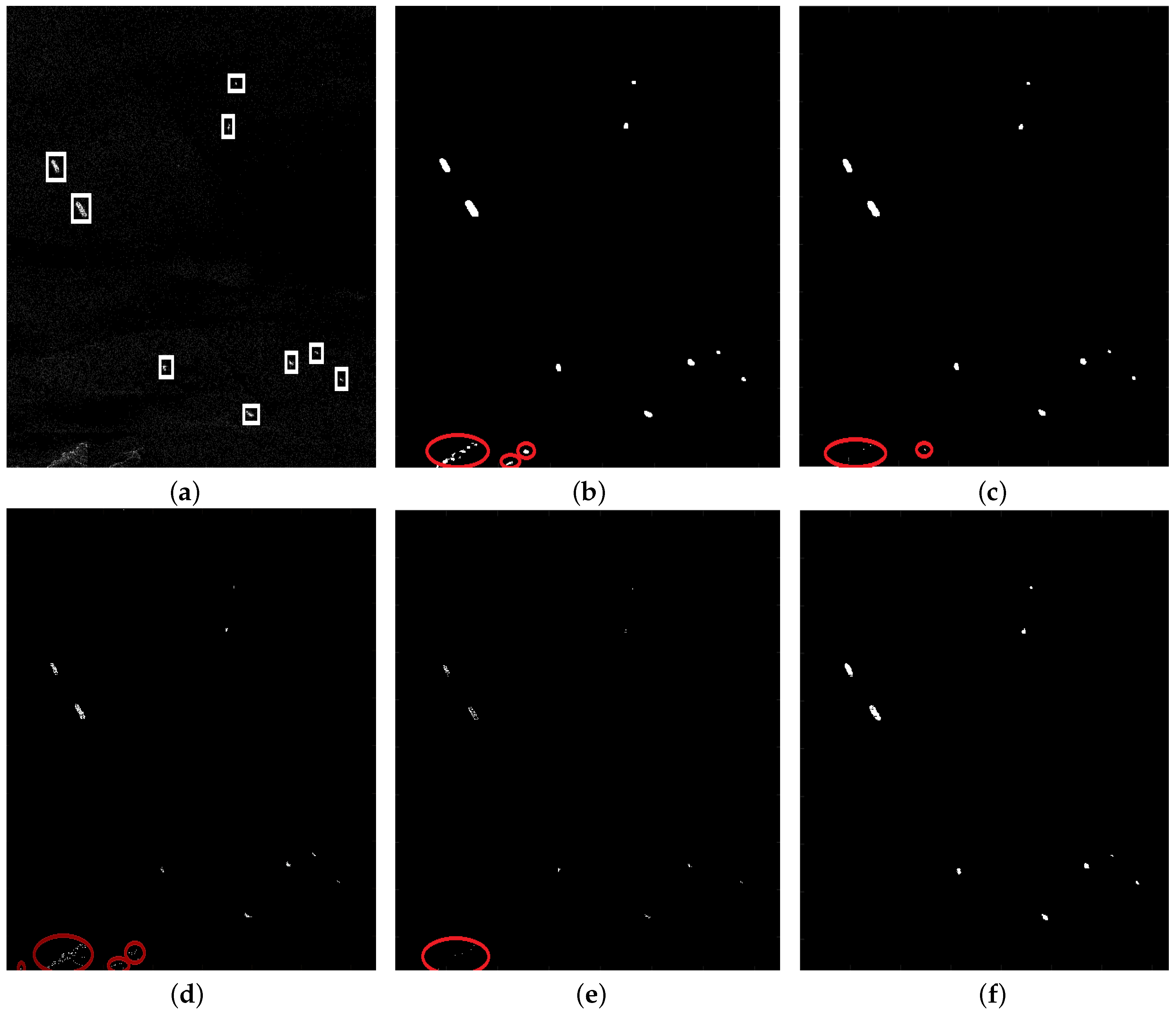
3.3. Comparisons of Different Methods
4. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Curlander, J.C.; McDonough, R.N. Synthetic Aperture Radar; John Wiley and Sons: New York, NY, USA, 1991. [Google Scholar]
- Margarit, G.; Barba Milanés, J.A.; Tabasco, A. Operational ship monitoring system based on synthetic aperture radar processing. Remote Sens. 2009, 1, 375–392. [Google Scholar] [CrossRef]
- Brusch, S.; Lehner, S.; Fritz, T.; Soccorsi, M.; Soloviev, A.; Van Schie, B. Ship surveillance with TerraSAR-X. IEEE Trans. Geosci. Remote Sens. 2011, 49, 1092–1103. [Google Scholar] [CrossRef]
- Crisp, D.J. The state-of-the-art in ship detection in synthetic aperture radar imagery. Org. Lett. 2004, 35, 2165–2168. [Google Scholar]
- Shi, H.; Zhang, Q.; Bian, M.; Wang, H.; Wang, Z.; Chen, L.; Yang, J. A Novel Ship Detection Method Based on Gradient and Integral Feature for Single-Polarization Synthetic Aperture Radar Imagery. Sensors 2018, 18, 563. [Google Scholar] [CrossRef] [PubMed]
- Blake, S. OS-CFAR theory for multiple targets and nonuniform clutter. IEEE Trans. Aerosp. Electron. Syst. 1988, 24, 785–790. [Google Scholar] [CrossRef]
- Leng, X.; Ji, K.; Yang, K.; Zou, H. A bilateral CFAR algorithm for ship detection in SAR images. IEEE Geosci. Remote Sens. Lett. 2015, 12, 1536–1540. [Google Scholar] [CrossRef]
- Tao, D.; Anfinsen, S.N.; Brekke, C. Robust CFAR detector based on truncated statistics in multiple-target situations. IEEE Trans. Geosci. Remote Sens. 2015, 54, 117–134. [Google Scholar] [CrossRef]
- Gao, G.; Gao, S.; He, J.; Li, G. Adaptive ship detection in hybrid-polarimetric sar images based on the power-entropy decomposition. IEEE Trans. Geosci. Remote Sens. 2018, 56, 5394–5407. [Google Scholar] [CrossRef]
- Xu, L.; Zhang, H.; Wang, C.; Zhang, B.; Tian, S. Compact polarimetric sar ship detection with m-δ decomposition using visual attention model. Remote Sens. 2016, 8, 751. [Google Scholar] [CrossRef]
- Ji, K.; Leng, X.; Wang, H.; Zhou, S.; Zou, H. Ship detection using weighted SVM and M-CHI decomposition in compact polarimetric SAR imagery. In Proceedings of the Geoscience and Remote Sensing Symposium (IGARSS), Fort Worth, TX, USA, 23–28 July 2017; pp. 890–893. [Google Scholar] [CrossRef]
- Eldhuset, K. An automatic ship and ship wake detection system for spaceborne SAR images in coastal regions. IEEE Trans. Geosci. Remote Sens. 1996, 34, 1010–1019. [Google Scholar] [CrossRef]
- Ouchi, K.; Tamaki, S.; Yaguchi, H.; Iehara, M. Ship detection based on coherence images derived from cross correlation of multilook SAR images. IEEE Geosci. Remote Sens. Lett. 2004, 1, 184–187. [Google Scholar] [CrossRef]
- Wang, X.; Chen, C. Adaptive ship detection in SAR images using variance WIE-based method. Signal Image Video Process. 2016, 10, 1219–1224. [Google Scholar] [CrossRef]
- Wang, X.; Chen, C. Ship detection for complex background SAR images based on a multiscale variance weighted image entropy method. IEEE Geosci. Remote Sens. Lett. 2017, 14, 184–187. [Google Scholar] [CrossRef]
- Huo, W.; Huang, Y.; Pei, J.; Zhang, Q.; Gu, Q.; Yang, J. Ship detection from ocean sar image based on local contrast variance weighted information entropy. Sensors 2018, 18, 1196. [Google Scholar] [CrossRef] [PubMed]
- Ferretti, A.; Prati, C.; Rocca, F. Permanent scatterers in SAR interferometry. IEEE Trans. Geosci. Remote Sens. 2001, 39, 8–20. [Google Scholar] [CrossRef]
- Mandic, D.P.; Goh, V.S.L. Complex Valued Nonlinear Adaptive Filters: Noncircularity, Widely Linear and Neural Models; Wiley: New York, NY, USA, 2009. [Google Scholar]
- Picinbono, B. On circularity. IEEE Trans. Signal Process. 1994, 42, 3473–3482. [Google Scholar] [CrossRef]
- Adali, T.; Schreier, P.J.; Scharf, L.L. Complex-valued signal processing: The proper way to deal with impropriety. IEEE Trans. Signal Process. 2011, 59, 5101–5125. [Google Scholar] [CrossRef]
- Xia, Y.; Douglas, S.C.; Mandic, D.P. Adaptive frequency estimation in smart grid applications: Exploiting noncircularity and widely linear adaptive estimators. IEEE Signal Process. Mag. 2012, 29, 44–54. [Google Scholar] [CrossRef]
- Rodriguez, P.A.; Calhoun, V.D.; Adalı, T. Phase ambiguity correction and visualization techniques for complex-valued ica of group fMRI data. Pattern Recognit. 2012, 45, 2050. [Google Scholar] [CrossRef] [PubMed]
- Wu, W.; Guo, H.; Li, X.; Ferro-Famil, L.; Zhang, L. Urban land use information extraction using the ultrahigh-resolution Chinese airborne sar imagery. IEEE Trans. Geosci. Remote Sens. 2015, 53, 5583–5599. [Google Scholar] [CrossRef]
- Wu, W.; Guo, H.; Li, X.; Ferro-Famil, L.; Zhang, L. Noncircularity parameters and their potential applications in UHR MMW sar data sets. IEEE Geosci. Remote Sens. Lett. 2017, 13, 1547–1551. [Google Scholar] [CrossRef]
- Leng, X.; Ji, K.; Zhou, S.; Zou, H. Noncircularity parameters and their potential in ship detection from high resolution SAR imagery. In Proceedings of the IGARSS 2017 IEEE International Geoscience and Remote Sensing Symposium, Fort Worth, TX, USA, 23–28 July 2017; pp. 1876–1879. [Google Scholar] [CrossRef]
- El-Darymli, K.; Moloney, C.; Gill, E.; Mcguire, P.; Power, D. On circularity/noncircularity in single-channel synthetic aperture radar imagery. Oceans 2015, 1–4. [Google Scholar] [CrossRef]
- Ollila, E. On the circularity of a complex random variable. IEEE Signal Process. Lett. 2008, 15, 841–844. [Google Scholar] [CrossRef]
- Tsai, D.Y.; Lee, Y.; Matsuyama, E. Information entropy measure for evaluation of image quality. J. Dig. Imaging 2008, 21, 338–347. [Google Scholar] [CrossRef] [PubMed]
- Yang, L.; Yang, J.; Yang, K. Adaptive detection for infrared small target under sea-sky complex background. Electron. Lett. 2004, 40, 1083–1085. [Google Scholar] [CrossRef]
- Wang, C.; Bi, F.; Zhang, W.; Chen, L. An intensity-space domain cfar method for ship detection in HR SAR images. IEEE Geosci. Remote Sens. Lett. 2017, 14, 529–533. [Google Scholar] [CrossRef]
- El-Darymli, K.; Mcguire, P.; Gill, E.W.; Power, D. Characterization and statistical modeling of phase in single-channel synthetic aperture radar imagery. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 2071–2092. [Google Scholar] [CrossRef]
- Li, H.C.; Hong, W.; Wu, Y.R.; Fan, P.Z. On the empirical-statistical modeling of SAR images with generalized gamma distribution. IEEE J. Sel. Top. Signal Process. 2011, 5, 386–397. [Google Scholar] [CrossRef]
- Qin, X.; Zhou, S.; Zou, H.; Gao, G. A CFAR detection algorithm for generalized gamma distributed background in high-resolution SAR images. IEEE Geosci. Remote Sens. Lett. 2013, 10, 806–810. [Google Scholar] [CrossRef]
- Kullback, S.; Leibler, R.A. On information and sufficiency. Ann. Math. Stat. 1951, 22, 79–86. [Google Scholar] [CrossRef]
- Robertson, N.; Bird, P.; Brownsword, C. Ship surveillance using RADARSAT ScanSAR images. In Proceedings of the Alliance for Marine Remote Sensing (AMRS) Workshop on Ship Detection in Coastal Waters, Pretoria, South Africa, 1 August 2000. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
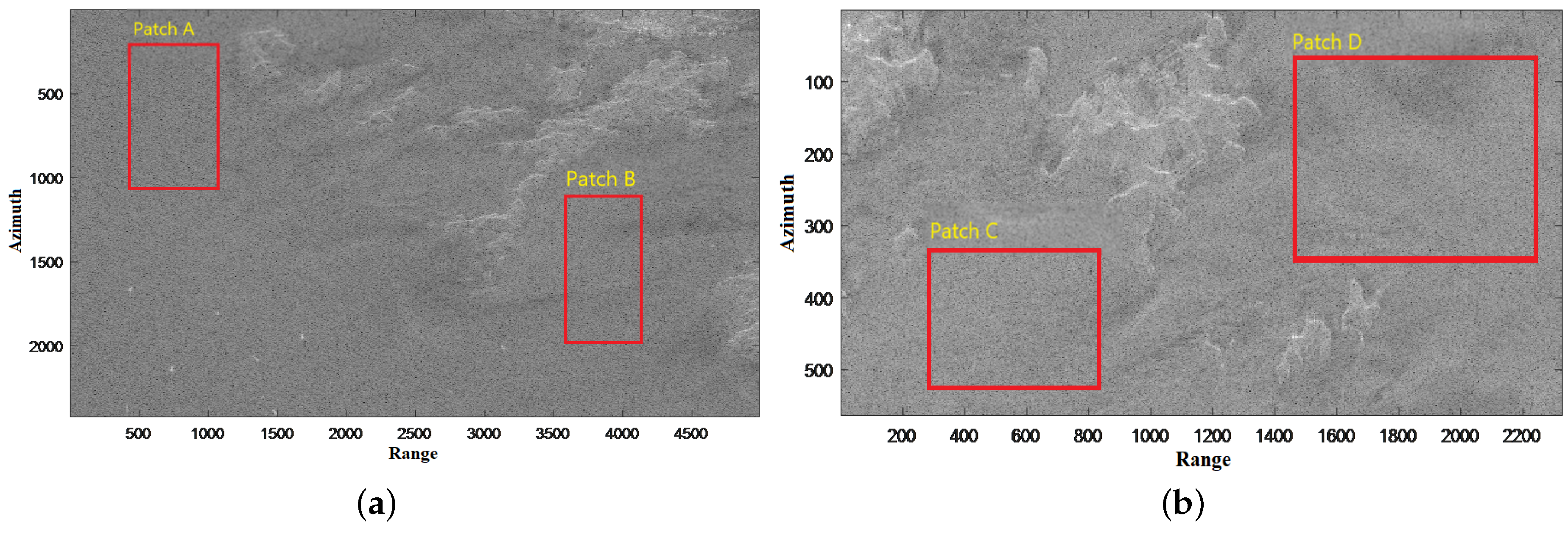
| Patch | A | B | C | D |
|---|---|---|---|---|
| KL value | 0.0007 | 0.0022 | 0.0003 | 0.0001 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, Y.-H.; Liu, P. Adaptive Ship Detection for Single-Look Complex SAR Images Based on SVWIE-Noncircularity Decomposition. Sensors 2018, 18, 3293. https://doi.org/10.3390/s18103293
Zhao Y-H, Liu P. Adaptive Ship Detection for Single-Look Complex SAR Images Based on SVWIE-Noncircularity Decomposition. Sensors. 2018; 18(10):3293. https://doi.org/10.3390/s18103293
Chicago/Turabian StyleZhao, Yu-Huan, and Peng Liu. 2018. "Adaptive Ship Detection for Single-Look Complex SAR Images Based on SVWIE-Noncircularity Decomposition" Sensors 18, no. 10: 3293. https://doi.org/10.3390/s18103293
APA StyleZhao, Y.-H., & Liu, P. (2018). Adaptive Ship Detection for Single-Look Complex SAR Images Based on SVWIE-Noncircularity Decomposition. Sensors, 18(10), 3293. https://doi.org/10.3390/s18103293