Analysis of DME/DME Navigation Performance and Ground Network Using Stretched-Front-Leg Pulse-Based DME

Abstract
:1. Introduction
2. Overview of Distance Measuring Equipment and Requirements on Alternative Aircraft Positioning
3. SFOL Pulse and Proposed SFOL-Based DME
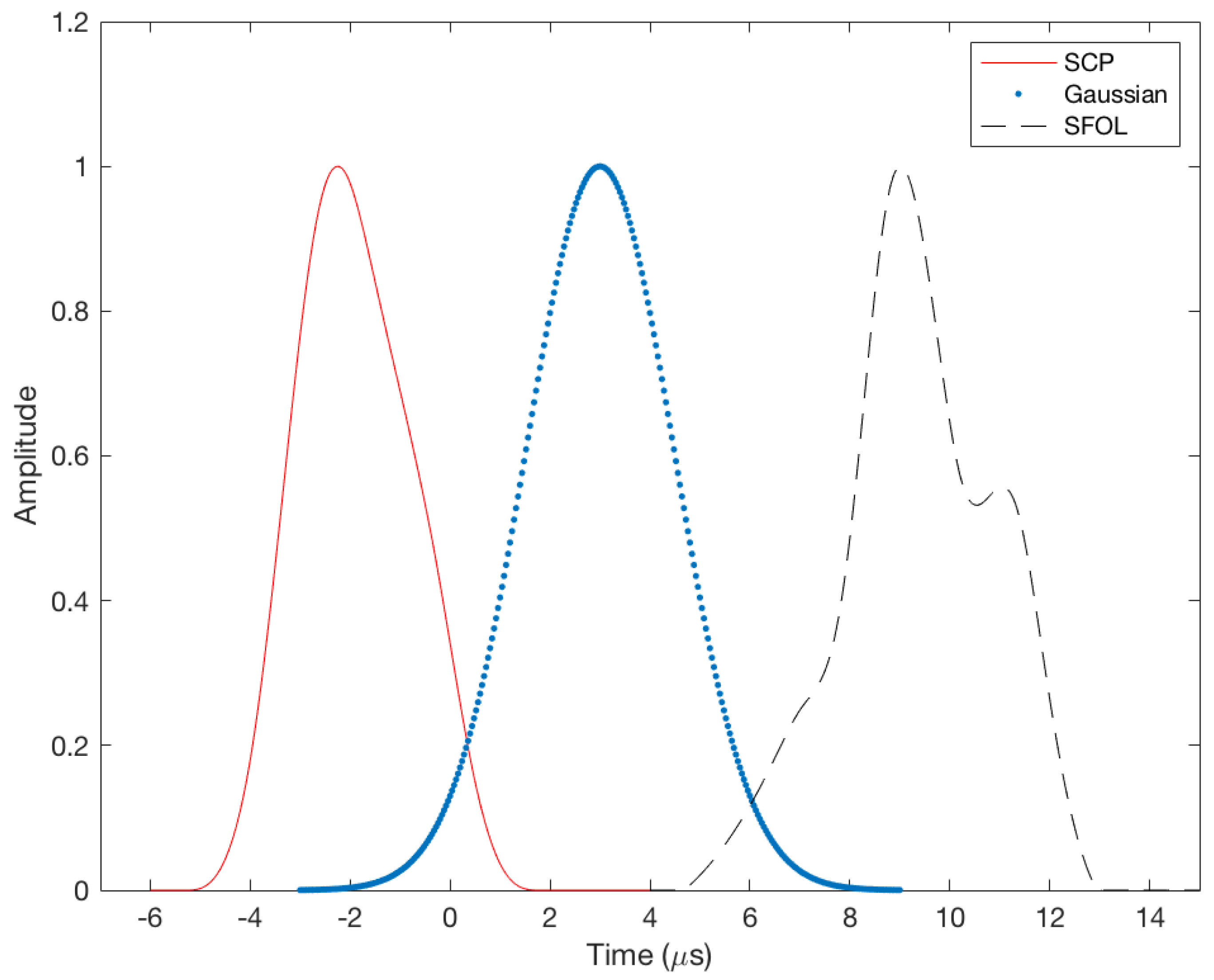
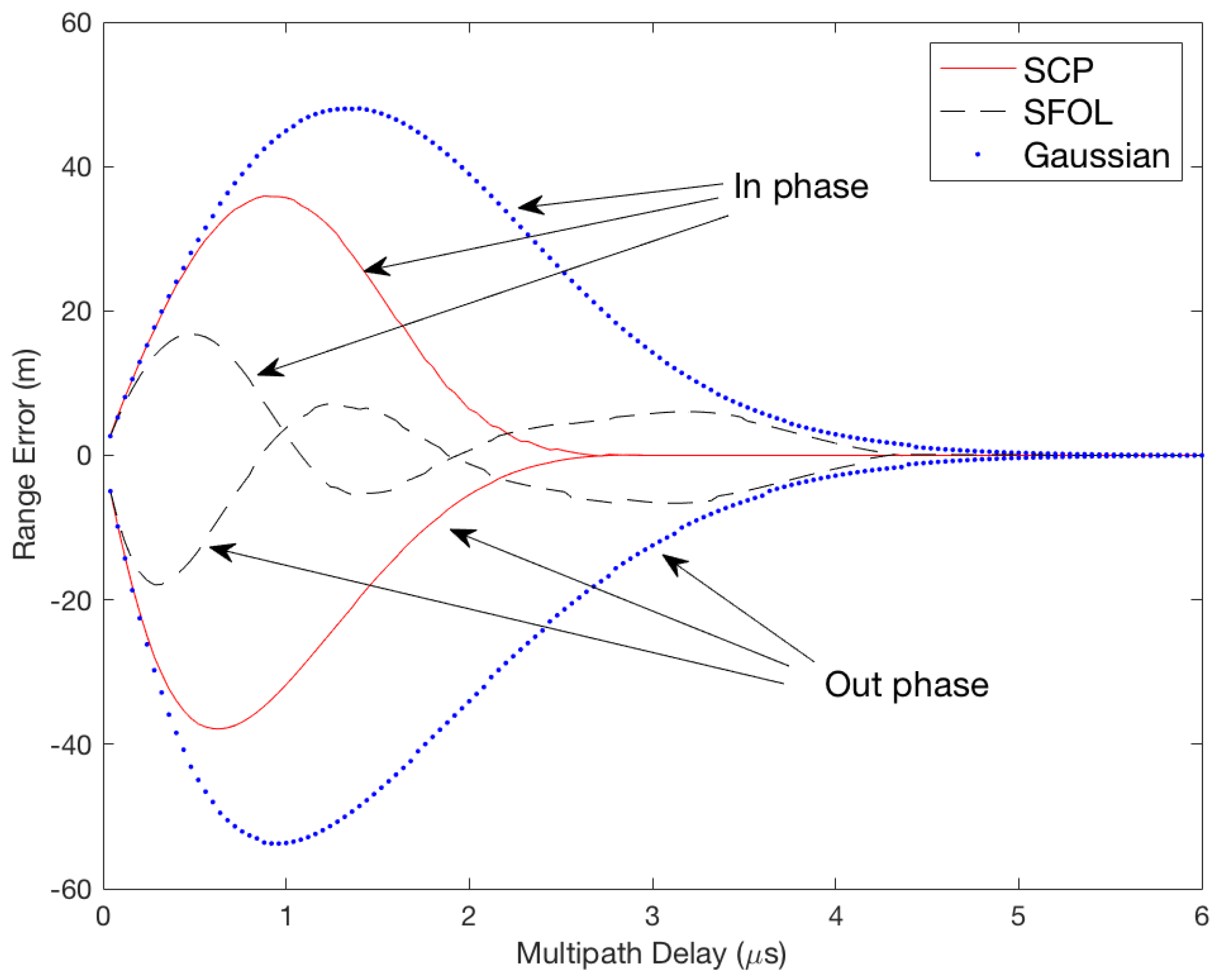
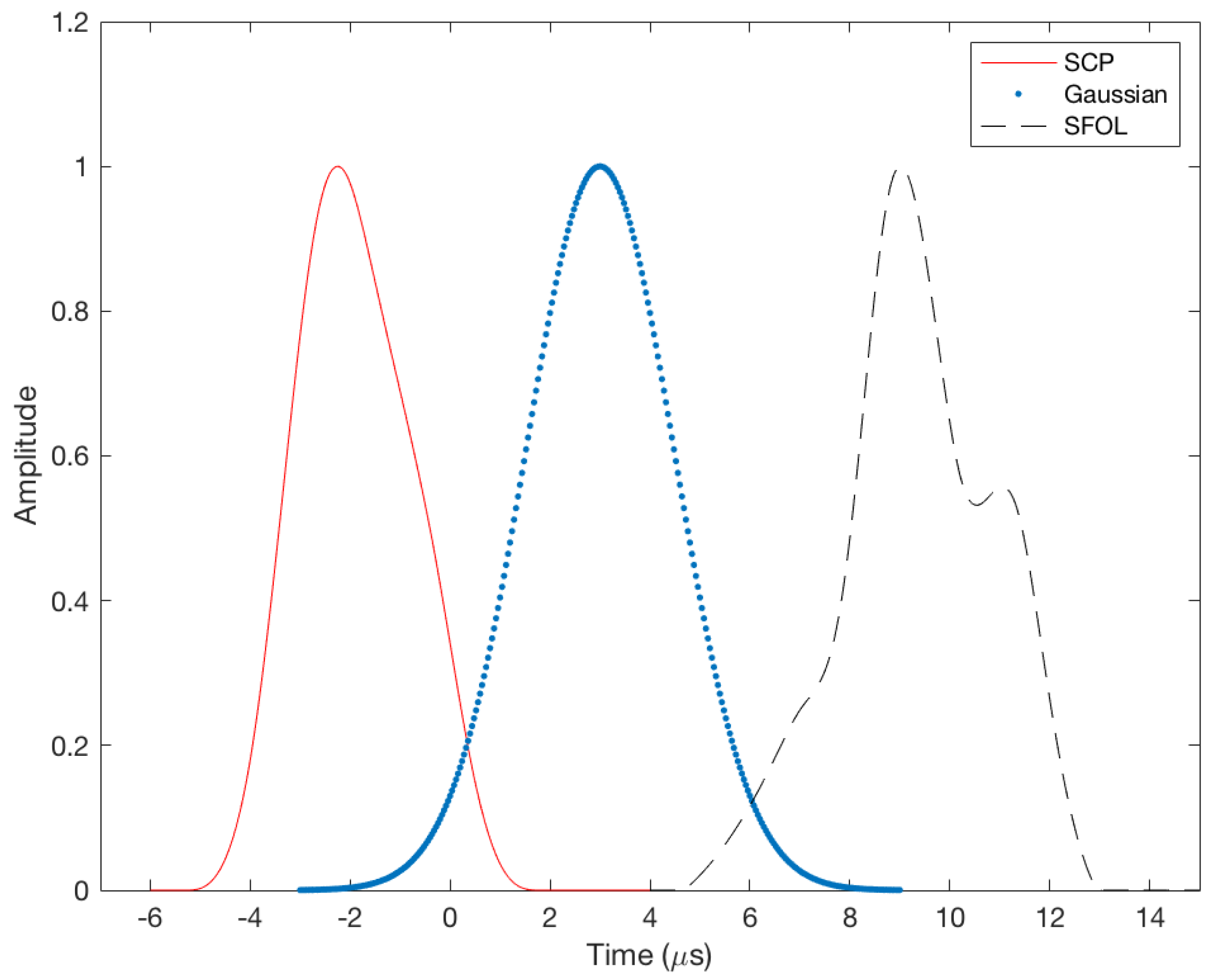
3.1. Overview of SFOL Pulse
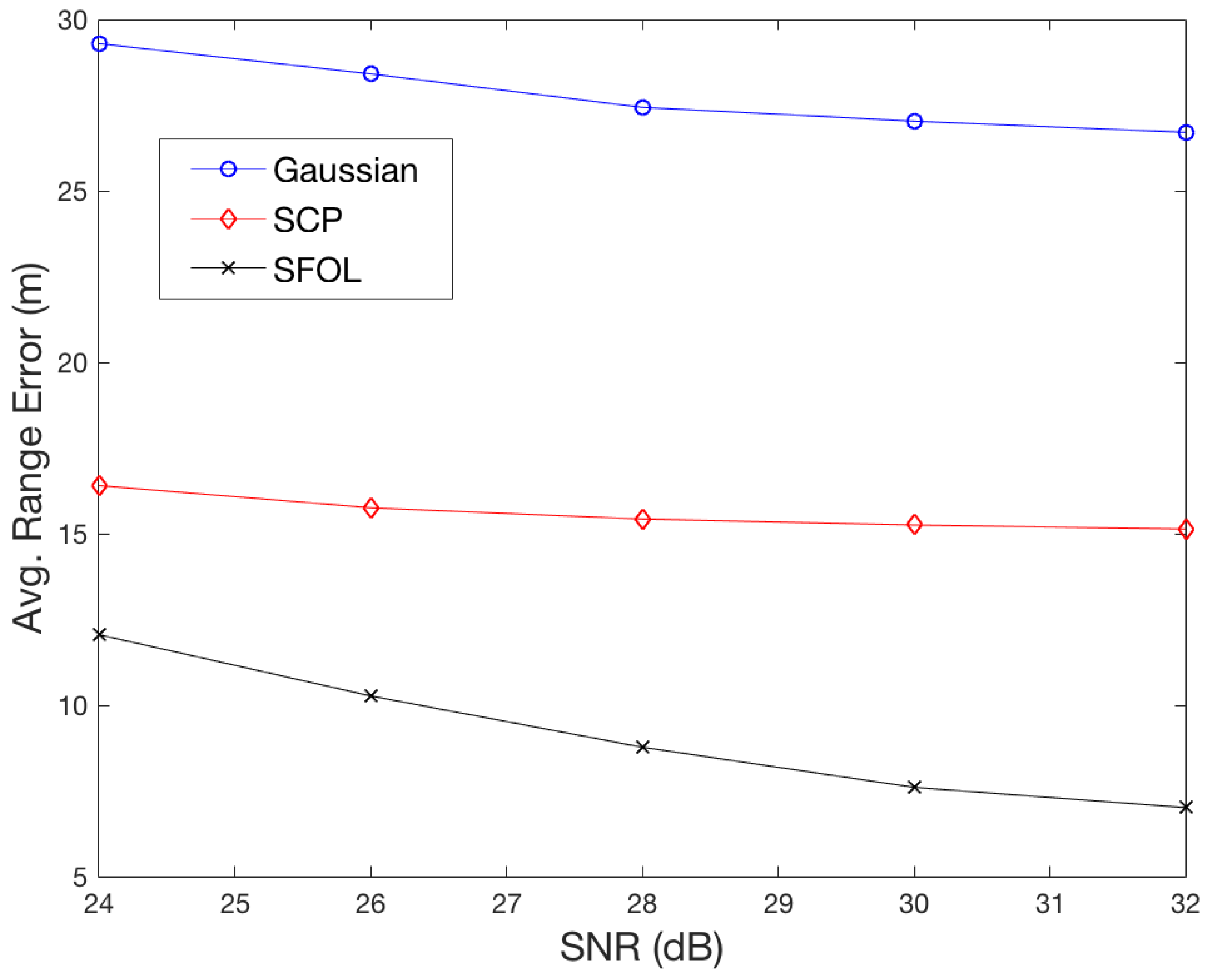
3.2. Proposed SFOL Pulse-Based DME
4. DME Ground Network Development Strategy
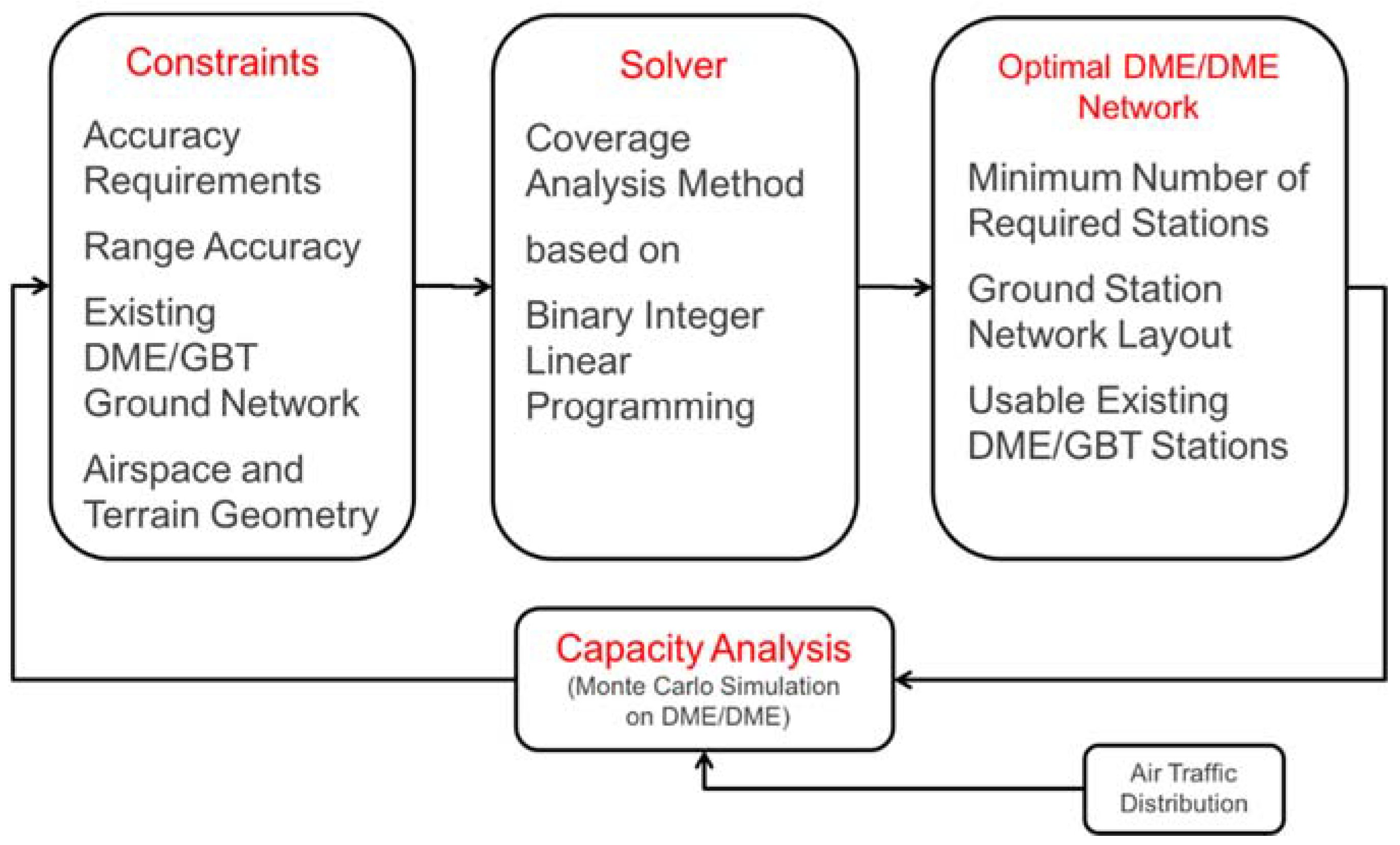
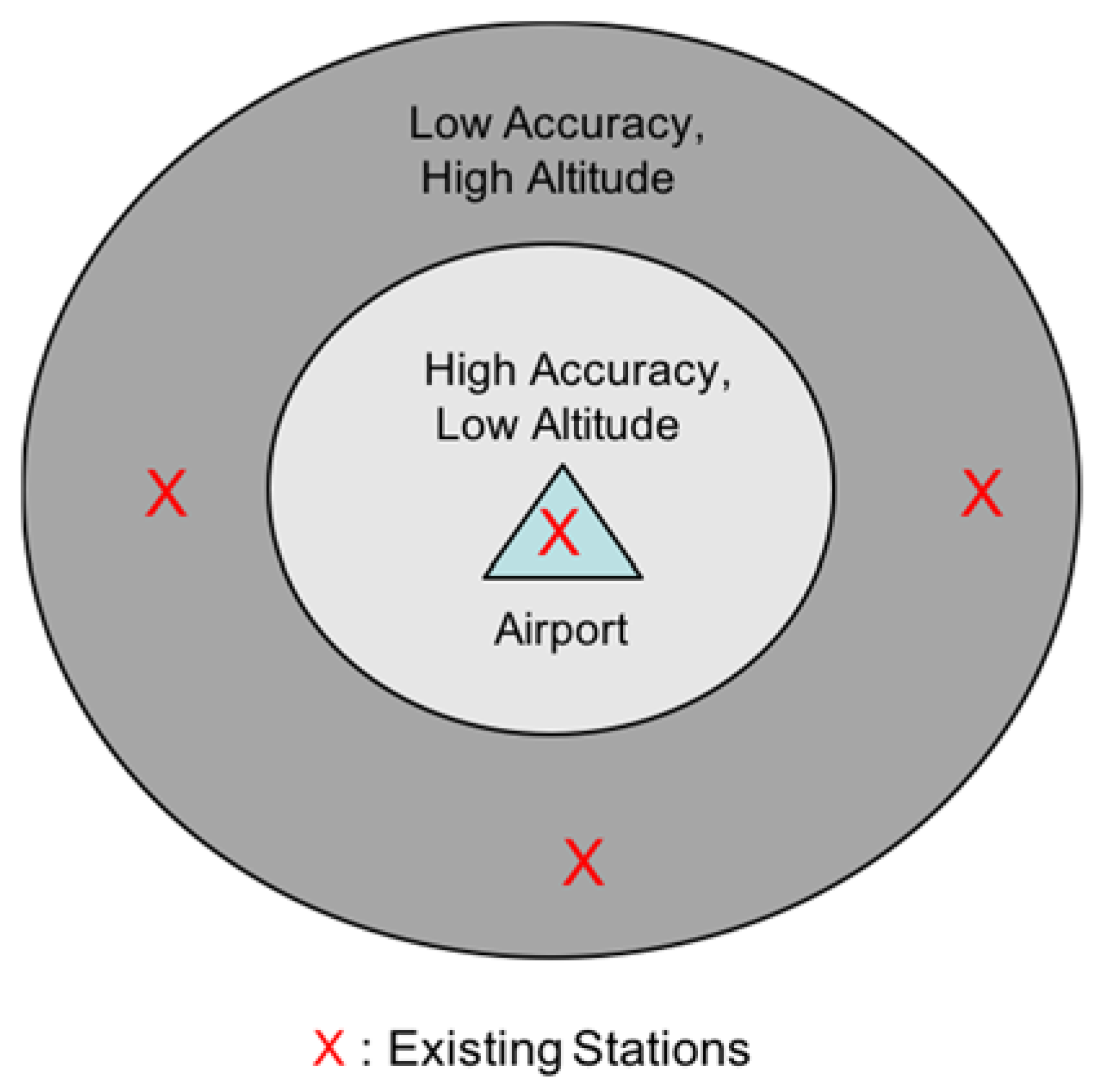
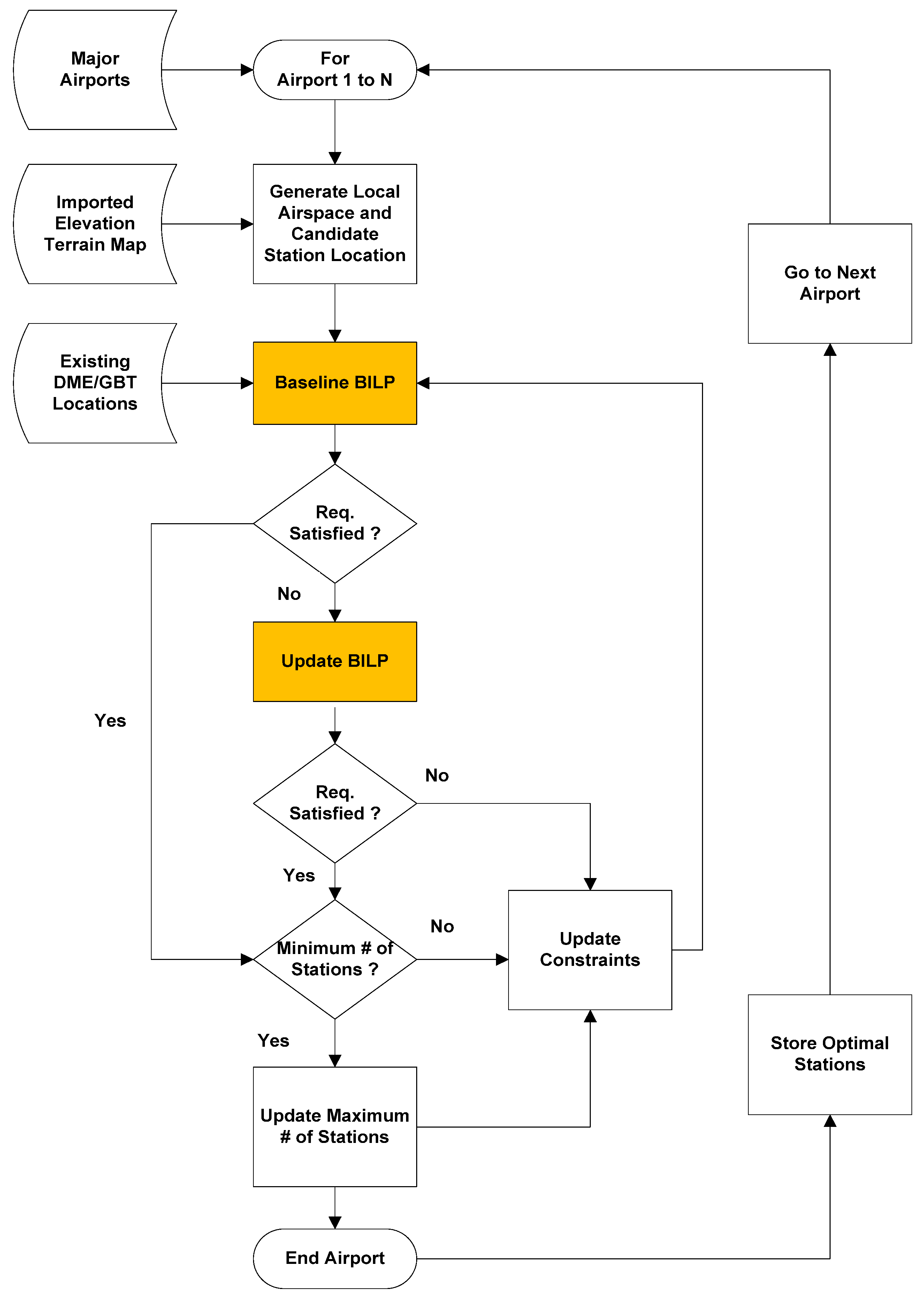
4.1. Overall Architecture Development Approach
Coverage Analysis Methodology Using Binary Linear Integer Programming
5. Optimized DME/DME Network with DME/S in Two Selected Regions
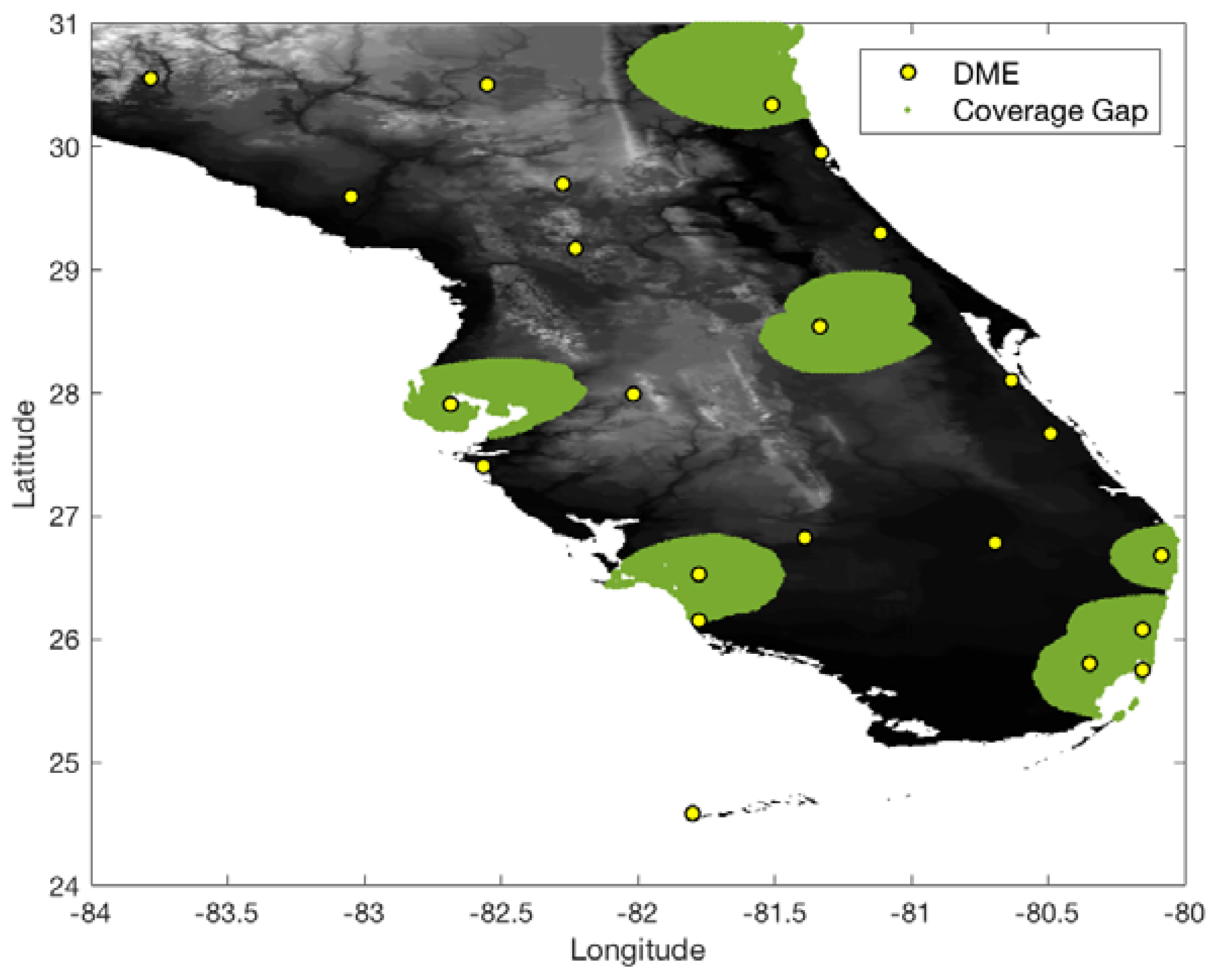
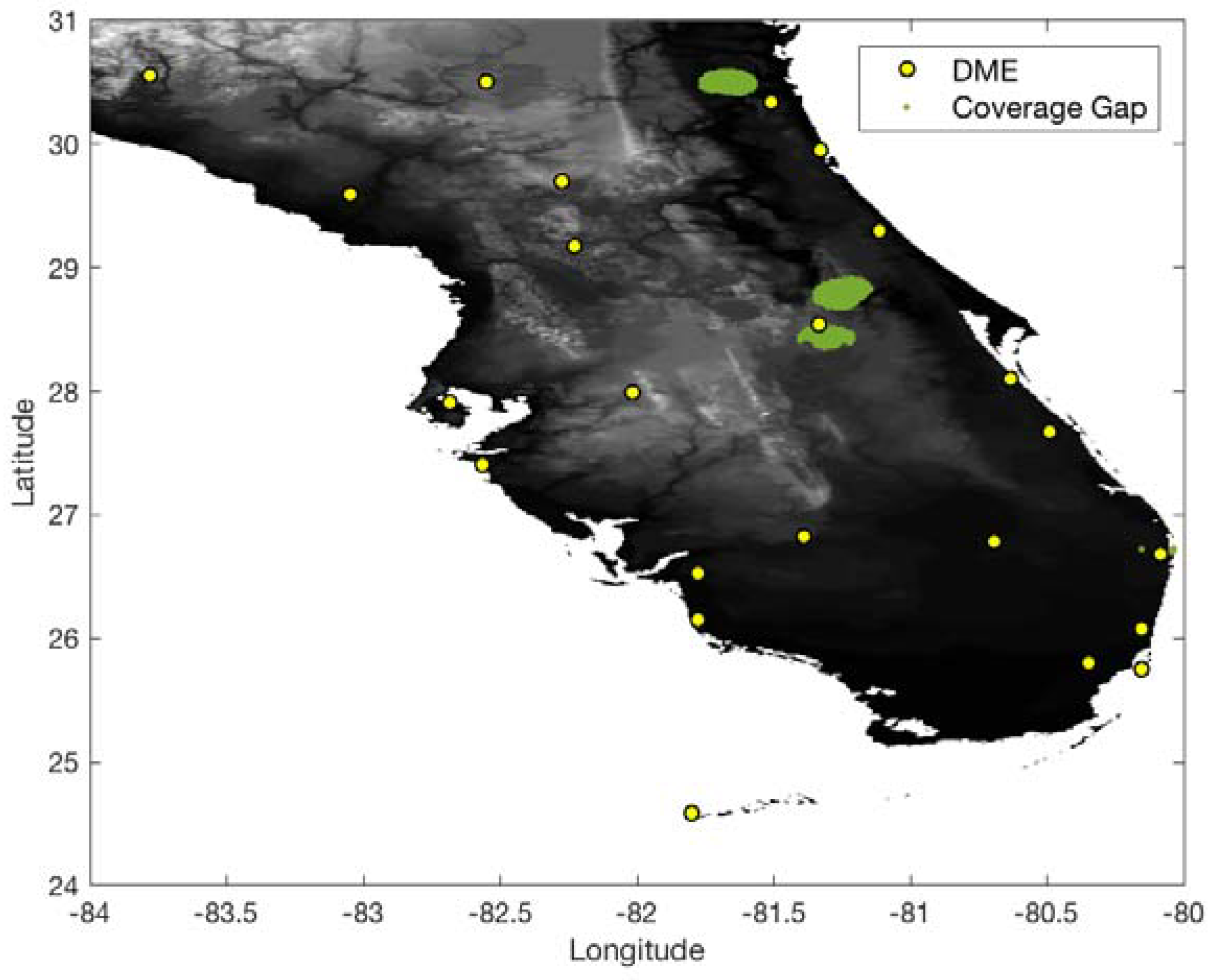
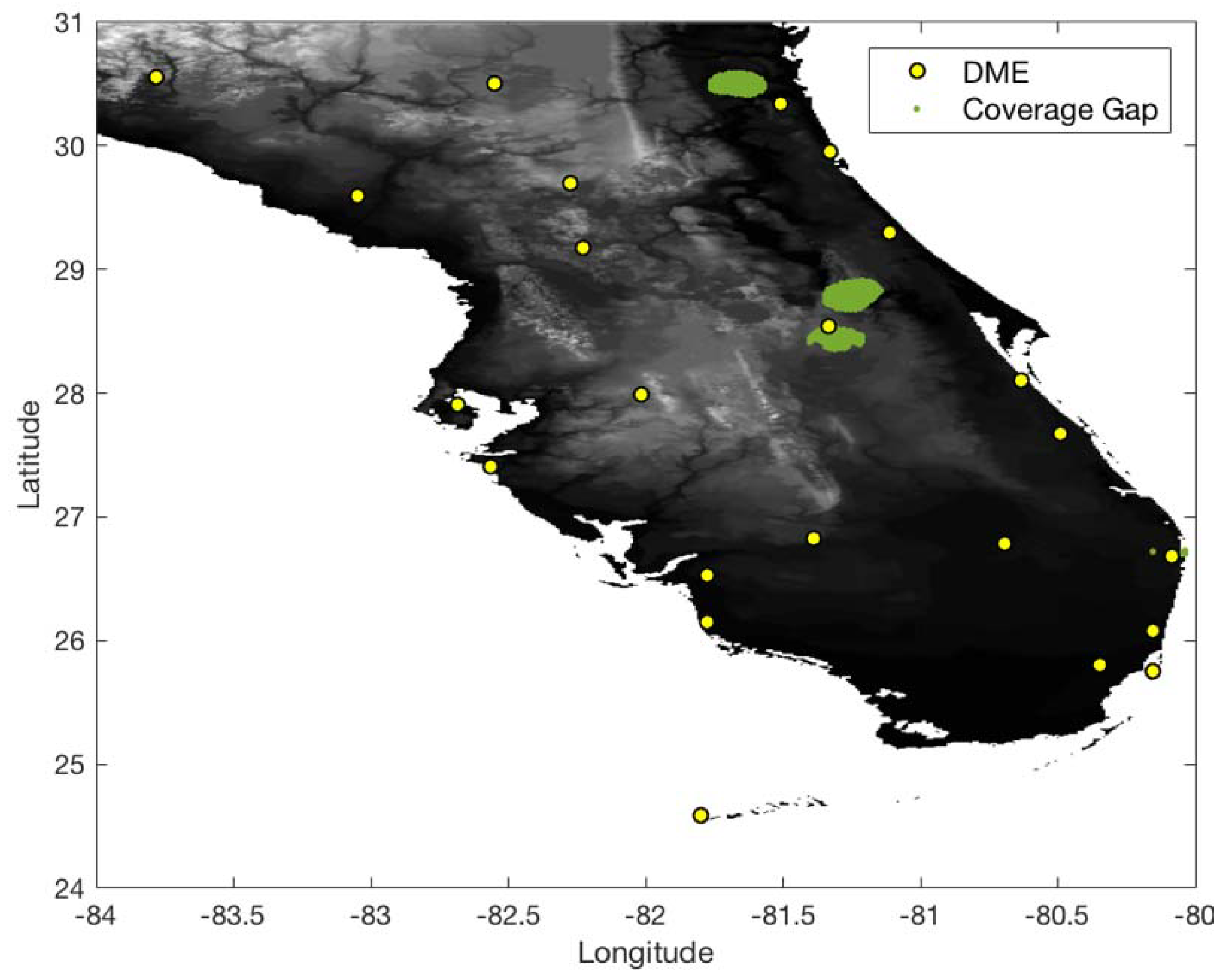
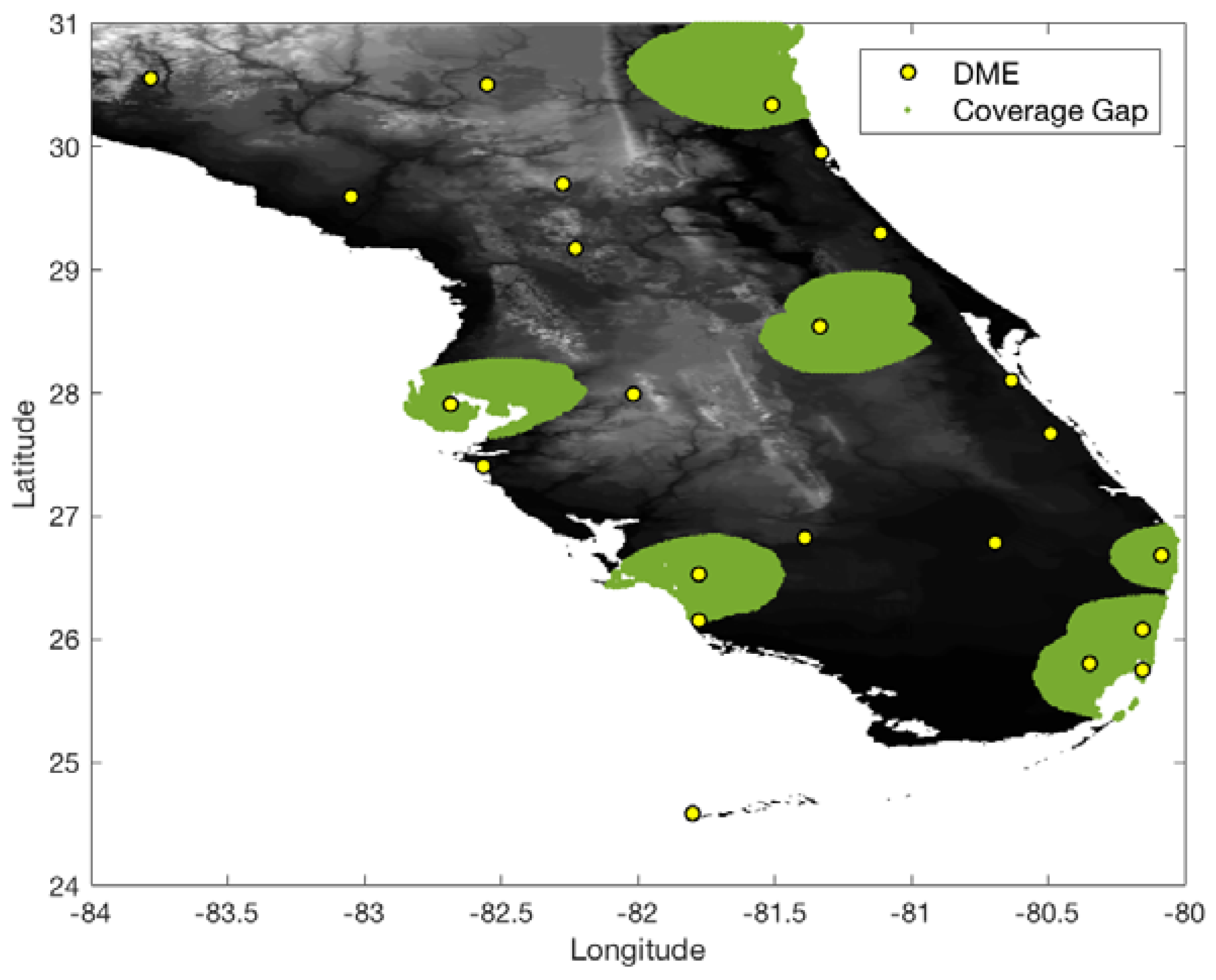
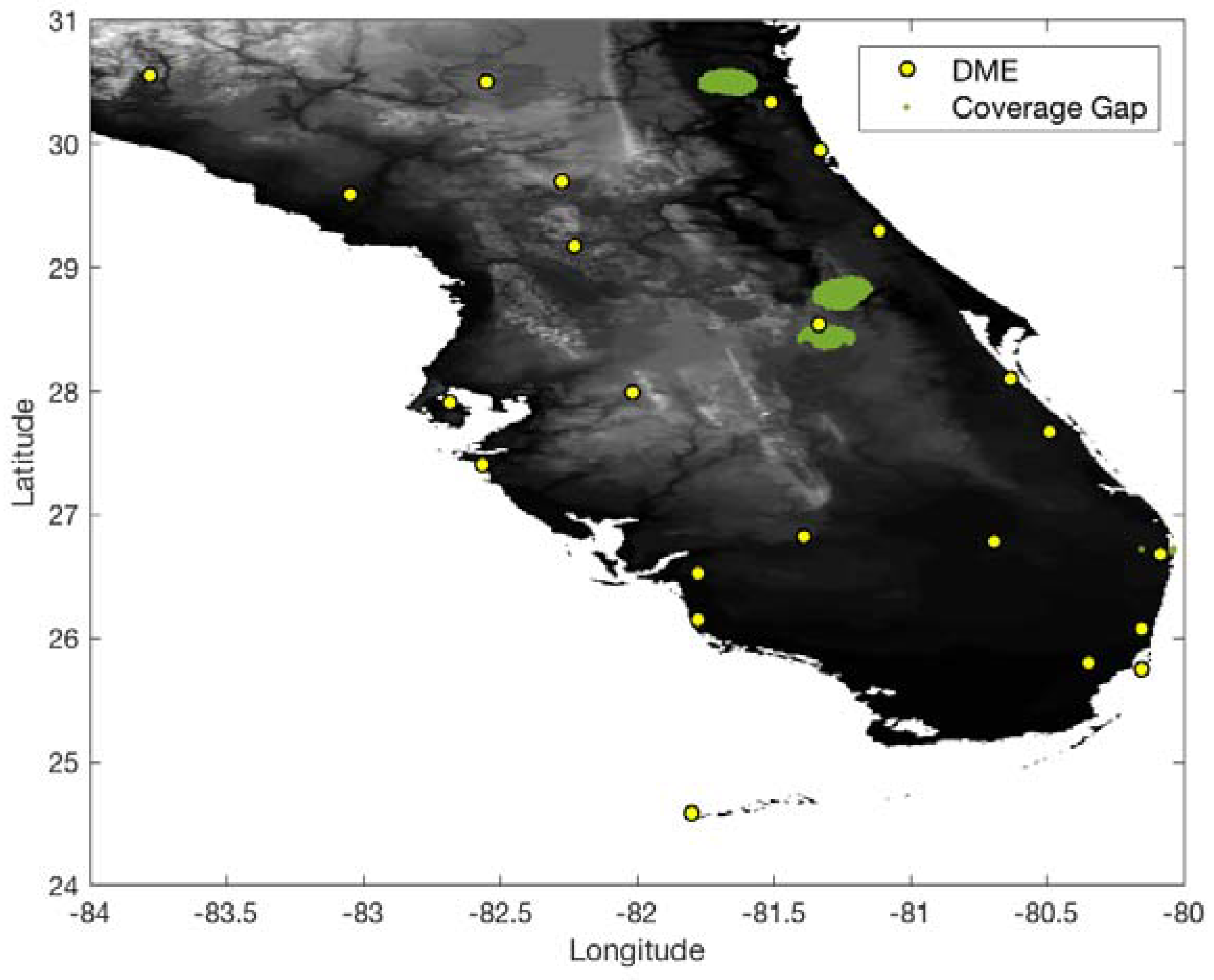
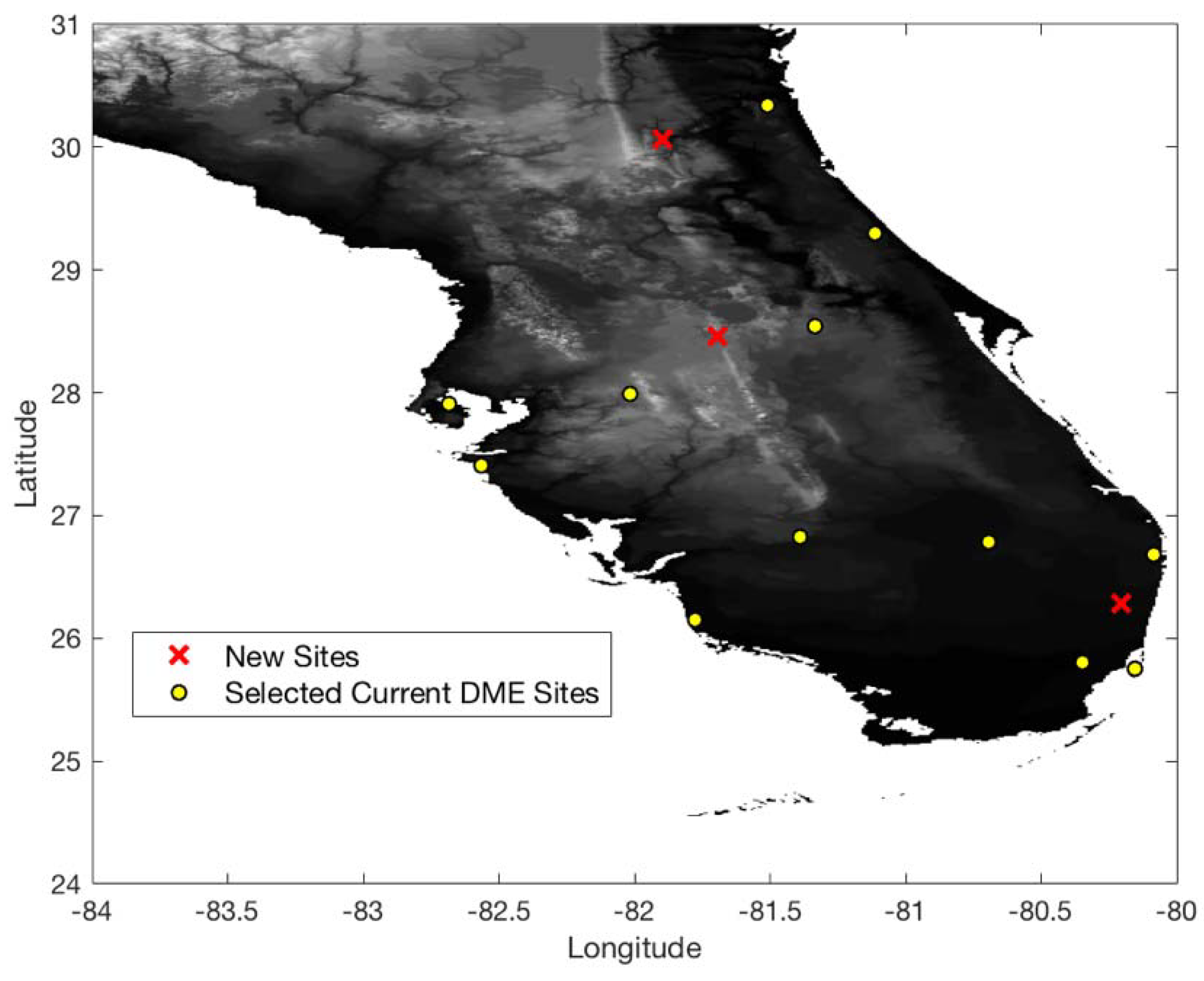
5.1. Case Study: South Florida
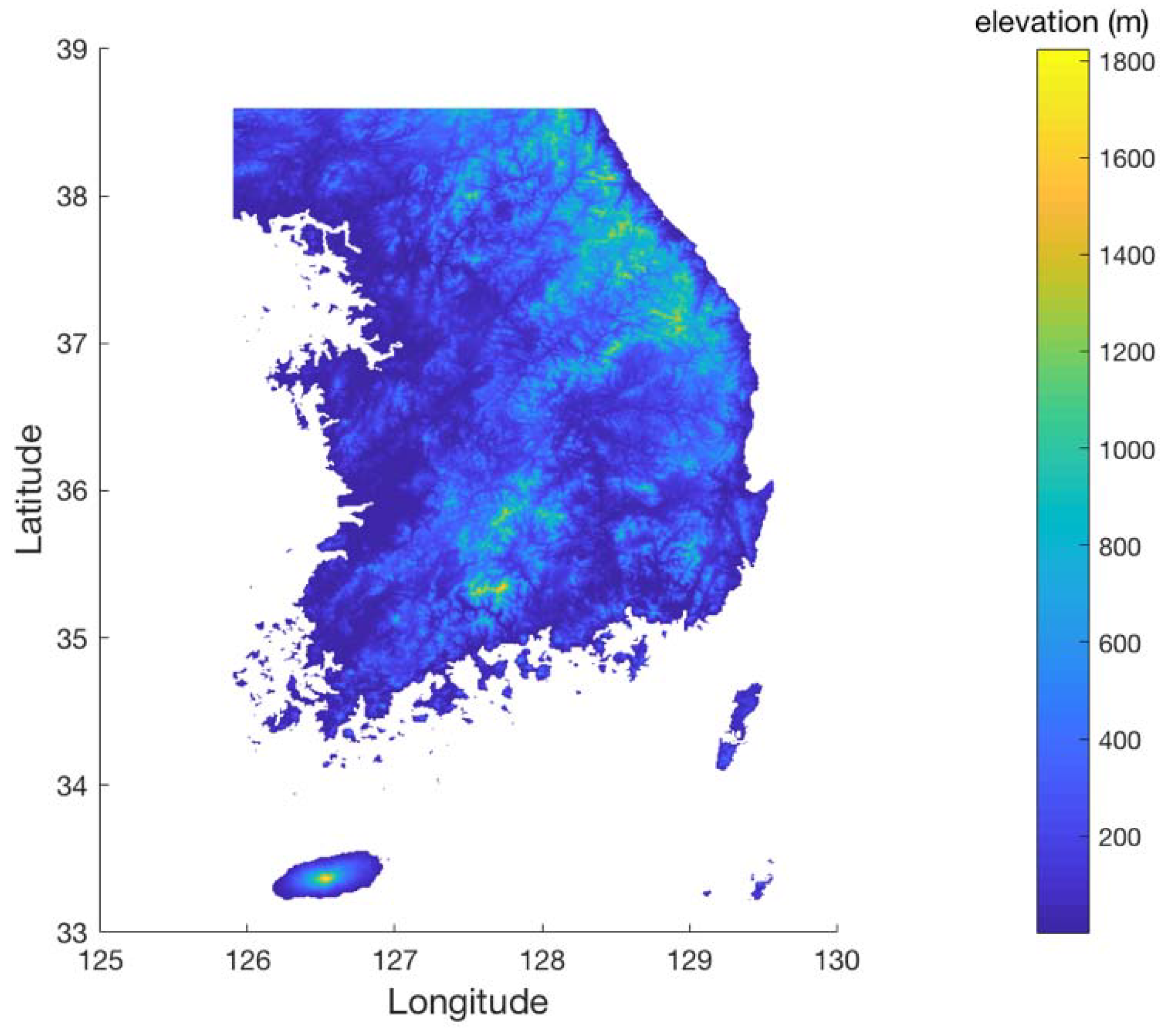
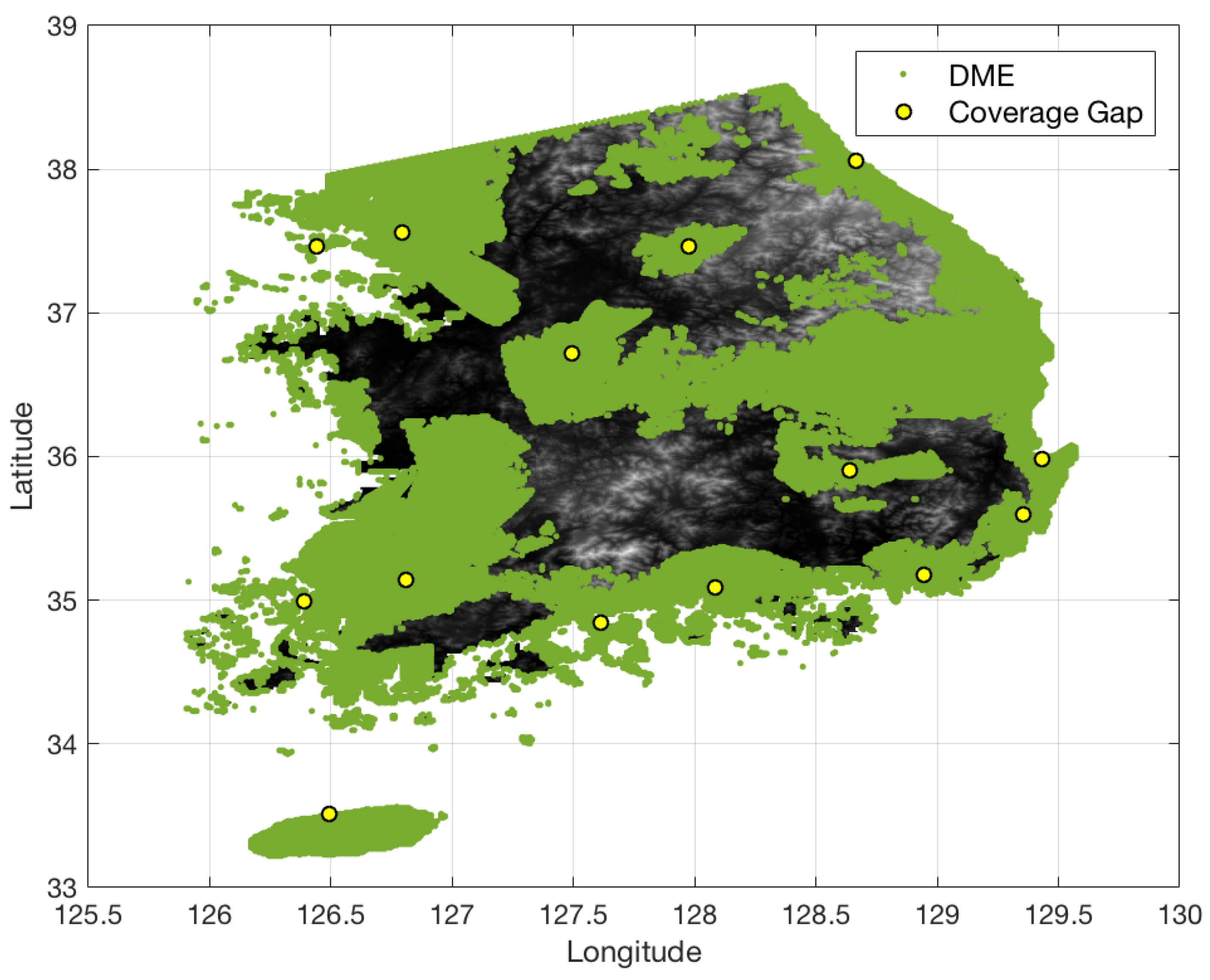
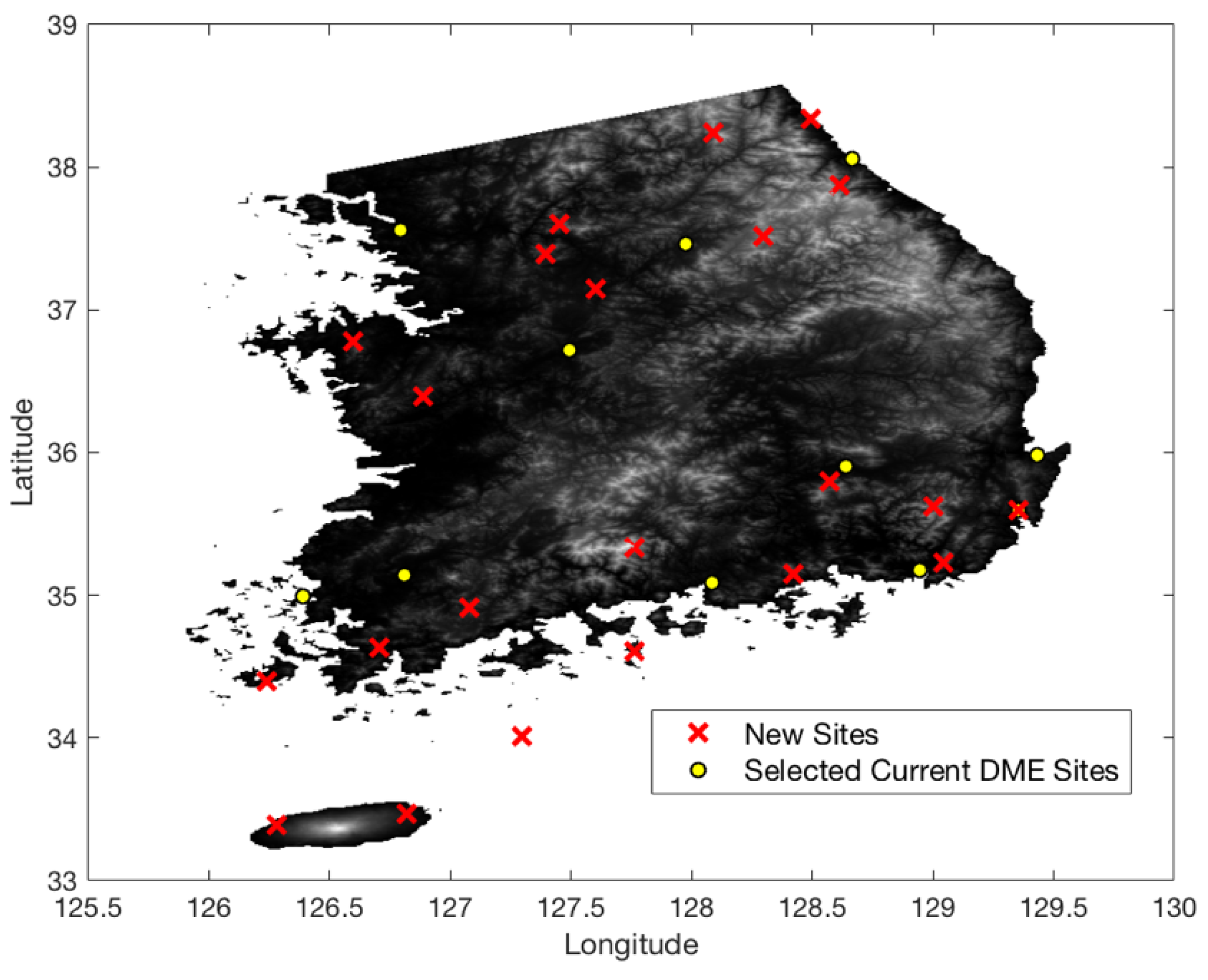
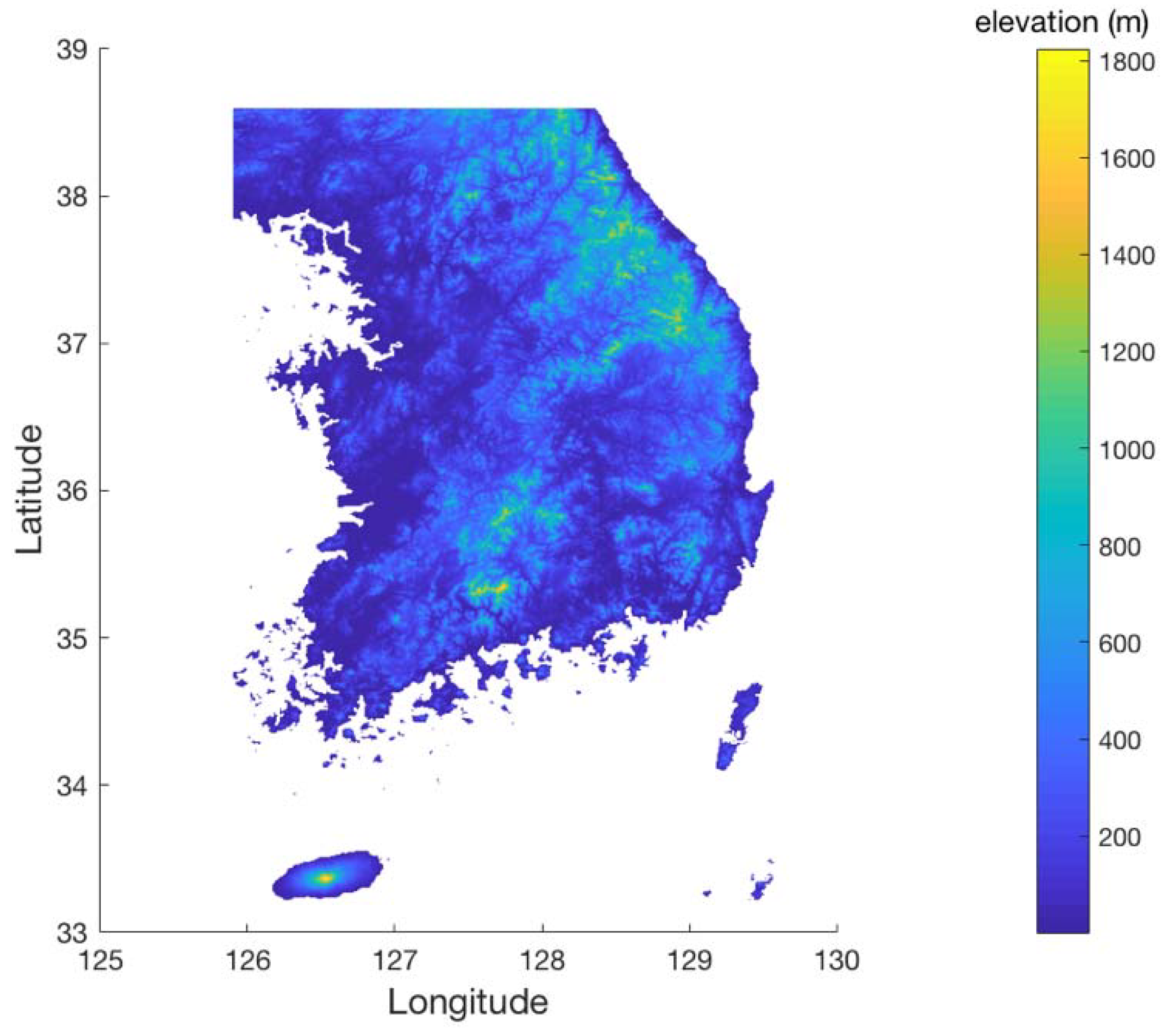
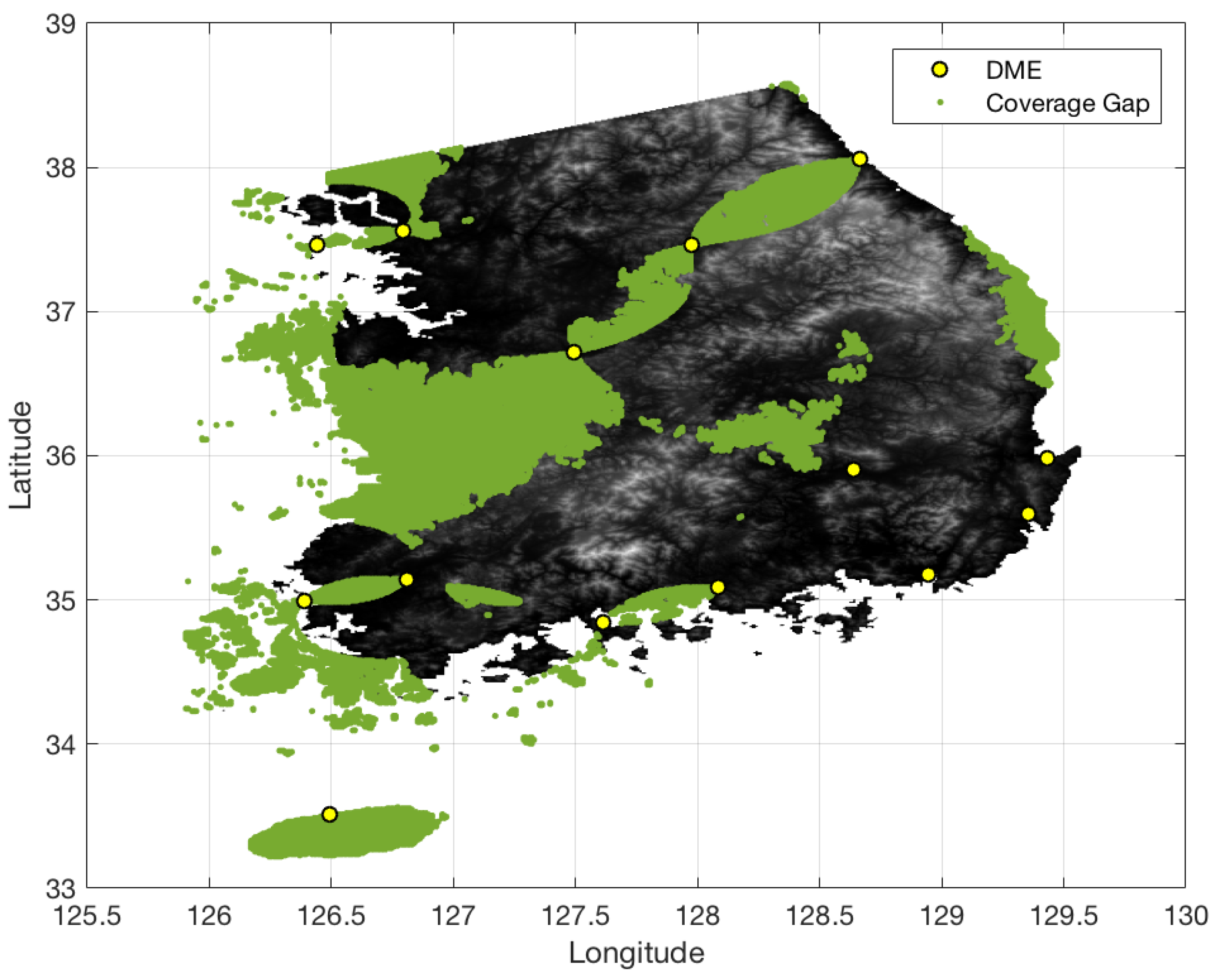
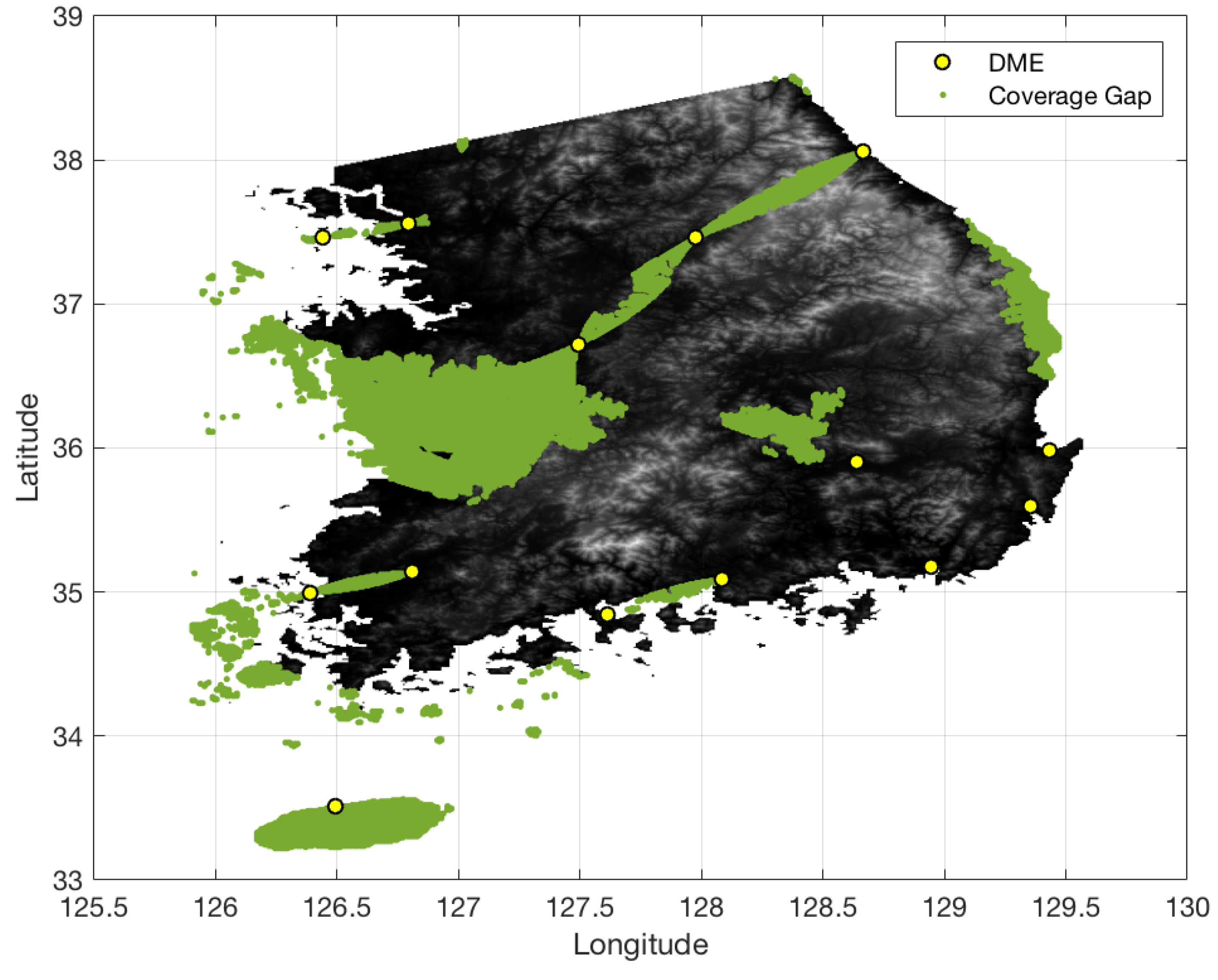
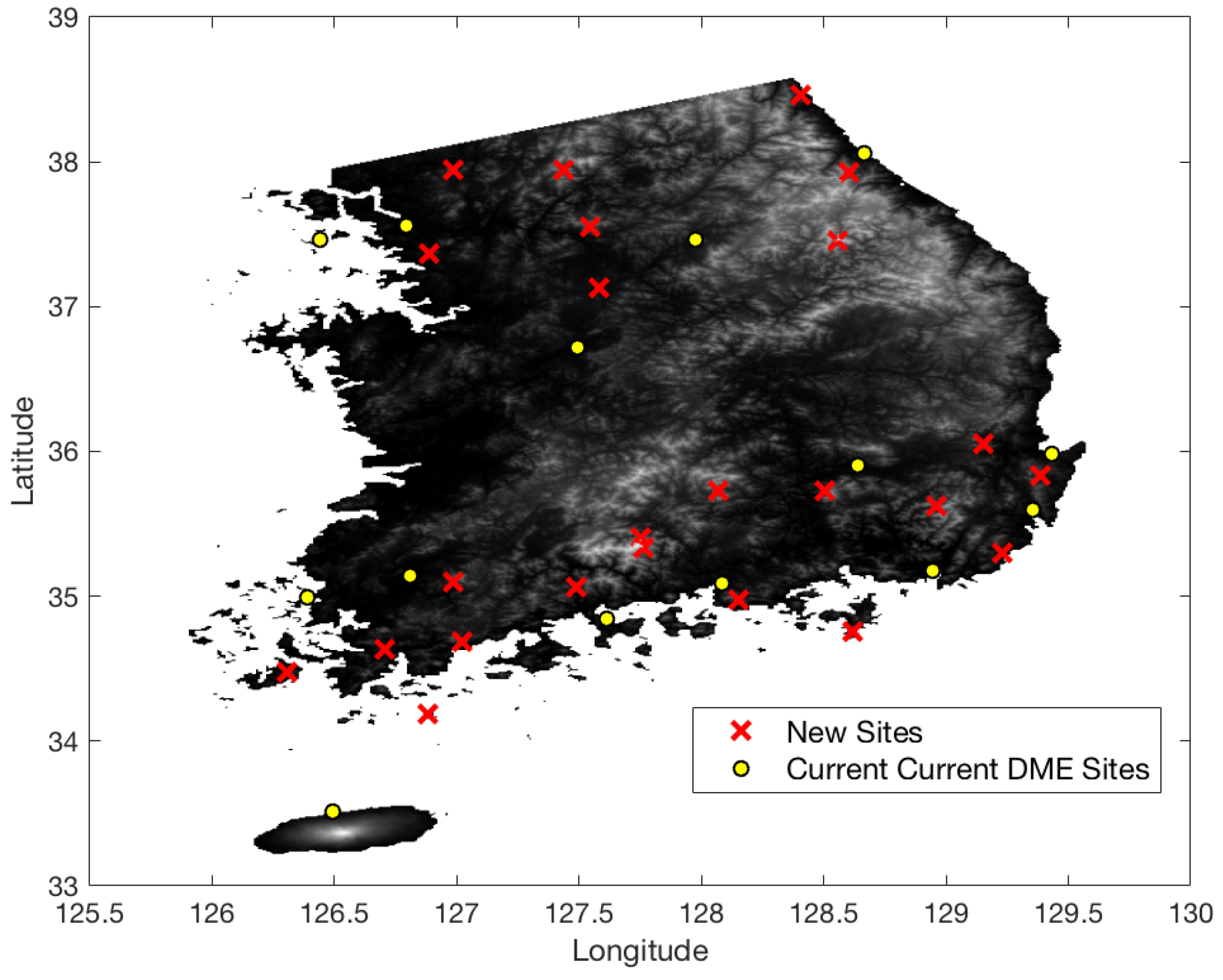
5.2. Case Study: South Korea
6. Discussion
Funding
Conflicts of Interest
References
- Faria, L.A.; Silvestere, C.A.M.; Correia, M.A.F. GPS-dependent systems: Vulnerabilities to electromagnetic attacks. J. Aerosp. Technol. Manag. 2016, 8, 423–430. [Google Scholar] [CrossRef]
- Narins, M.; Eldredge, L.; Enge, P.; Harrison, M.; Kenagy, R.; Lo, S. Alternative position, navigation, and timing: The need for robust radionavigation. In Global Navigation Satellite Systems: Report of a Joint Workshop of the National Academy of Engineering and the Chinese Academy of Engineering; Royal Institute of Navigation—NAV 10; The National Academies Press: Washington, DC, USA, 2012. [Google Scholar]
- Lo, S.; Enge, P.; Niles, F.; Loh, R.; Eldredge, L. Preliminary assessment of alternative navigation means for civil aviation. In Proceedings of the 2010 ION ITM, San Diego, CA, USA, 25–27 January 2010. [Google Scholar]
- Kelly, R.J.; Cusick, D.R. Distance measuring equipment and its evolving role in aviation. In Advances in Electronics and Electron Physics; Hawkes, P.W., Ed.; Academic Press, Inc.: Cambridge, MA, USA, 1986; Volume 68, pp. 73–75. [Google Scholar]
- Lilley, R.; Robert, E. DME/DME for Alternative Position, Navigation, and Timing (APNT); APNT White Paper; Federal Aviation Administration: Washington, DC, USA, 2012. [Google Scholar]
- Pelgrum, W.; Li, K.; Smearcheck, M.; Van Graas, F. eDME architecture development and flight-test evaluation. In Proceedings of the 25th International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS 2012), Nashville, TN, USA, 17–21 September 2012; pp. 812–825. [Google Scholar]
- Kim, E. Improving DME performance for APNT using alternative pulse and multipath mitigation. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 877–887. [Google Scholar] [CrossRef]
- Kim, E.; Seo, J. SFOL pulse, a high accuracy DME pulse for alternative aircraft position and navigation. Sensors 2017, 17, 2183. [Google Scholar] [CrossRef] [PubMed]
- Kim, O.-J.; Kim, C.; Song, J.; Yun, H.; Kim, D.; Kee, C.; Lee, T. A new concept of APNT: MOSAIC/DME 3-D positioning with a single DME station. In Proceedings of the 2012 International Technical Meeting of the Institute of Navigation, Newport Beach, CA, USA, 1–30 January 2012; pp. 142–150. [Google Scholar]
- Thiasiriphet, T.; Shutin, D.; Schnekenburger, N. Application of bayesian filtering for multipath in LDACS1-based APNT applications. In Proceedings of the 27th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2014), Tampa, FL, USA, 8–12 September 2014; pp. 3065–3075. [Google Scholar]
- Helfrick, A. Principles of Avionics, 6th ed.; Avionics Communications Inc.: Leesburg, VA, USA, 2010; pp. 55–56. [Google Scholar]
- FAA. Performance-Based Navigation (PBN) National Airspace System (NAS) Navigation Strategy 2016; U.S. Department of Transportation: Washington, DC, USA, July 2016.
- FAA. Performance Specification Distance Measuring Equipment (DME); FAA-E-2996; U.S. Department of Transportation: Washington, DC, USA, 2008; pp. 7–16.
- RTCA Special Committe-149. Minimum Operation Performance Standards (MOPS) for Airborne Distance Measuring Equipment (DME) Operating within the Radio Frequency Range of 960-1215 MHz; RTCA DO-189; RTCA Inc.: Washington, DC, USA, 1985; p. 18. [Google Scholar]
- Kim, E. Investigation of APNT optimized DME/DME network using current state-of-art DMEs: Ground station network, accuracy, and capacity. In Proceedings of the IEEE/ION PLANS 2012, Myrtle Beach, SC, USA, 24–26 April 2012. [Google Scholar]
- Kim, E. A Coverage analysis methodology for APNT pseudolite ground network. In Proceedings of the 2011 ION GNSS, Portland, OR, USA, 20–23 September 2011. [Google Scholar]
- Farahani, R.Z.; Hekmatfar, M. Facility Location Concepts, Models, Algorithms and Case Studies; Physica-Verlag: Heidelberg, Germany, 2009; pp. 1–4. [Google Scholar]
- Dasqupta, S.; Papadimitriou, C.; Vazirani, U. Algorithms, 1st ed.; McGraw-Hill Education: New York, NY, USA, 2006; pp. 247–278. [Google Scholar]
- Roa, J.O.; Jiménez, A.R.; Seco, F.; Prieto, J.C.; Ealo, J. Optimal placement of sensors for trilateration: Regular lattices vs meta-heuristic solutions. In Computer Aided Systems Theory—EUROCAST 2007; Springer: Berlin, Germany, 2007; pp. 780–787. [Google Scholar]
- Ray, P.K.; Maha, A. A genetic algorithm-based approach to calculate the optimal configuration of ultrasonic sensors in a 3d position estimation system. Robot. Auton. Syst. 2012, 41, 165–177. [Google Scholar] [CrossRef]
- Leune, T.; Wehs, T.; Janssen, M.; Koch, C.; Von Cölln, G. Optimization of wireless locating in complex environments by placement of anchor nodes with evolutionary algorithms. In Proceedings of the 2013 IEEE 18th Conference on Emerging Technologies & Factory Automation (ETFA), Cagliari, Italy, 10–13 September 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 1–6. [Google Scholar]
- Monica, S.; Ferrari, G. Optimized anchors placement: An analytical approach in uwb-based tdoa localization. In Proceedings of the 2013 9th International Wireless Communications and Mobile Computing Conference (IWCMC), Sardinia, Italy, 1–5 July 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 982–987. [Google Scholar]
- Monica, S.; Ferrari, G. Uwb-based localization in large indoor scenarios: Optimized placement of anchor nodes. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 987–999. [Google Scholar] [CrossRef]
- Kim, E. Benefit analysis of a GA-based DME/N pulse on PBN. In Proceedings of the 2017 Integrated Communications, Navigation and Surveillance Conference (ICNS), Herndon, VA, USA, 18–20 April 2017; pp. 4B1-1–4B1-7. [Google Scholar] [CrossRef]
- Kim, E.; Cho, H. High accuracy SFOL DME/N pulse and its recommended implementation in South Korea for alternative aircraft navigation. In Proceedings of the 2018 IEEE/ION Position, Location and Navigation Symposium (PLANS), Monterey, CA, USA, 23–26 April 2018; pp. 1039–1041. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 95% Accuracy (m) | Legacy DME (DME Spec.) | Modern State-of-the-Art DME Performance [2,13] | DME/S |
|---|---|---|---|
| Signal in Space | |||
| Reply Delay (m) | 75.0 | 15.0 | 10.0 (DME/P) |
| (FAA-E-2996) | (measured) | ||
| Propagation to Aircraft/Noise (m) | 127.3 | 39.0 | 16.8 (analysis) |
| (derived) | (analysis) | ||
| Air/Avionics | |||
| Avionics Bias (m) | 315.0 | 62.0 | 15.0 (DME/P) |
| (DO-189) | (derived) | ||
| Propagation to Transponder/Noise (m) | 127.3 | 54 | 16.8 (analysis) |
| (derived) | (analysis) | ||
| Total root sum square (RSS) (m) | 370.4 | 92.1 | 29.8 |
© 2018 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, E. Analysis of DME/DME Navigation Performance and Ground Network Using Stretched-Front-Leg Pulse-Based DME. Sensors 2018, 18, 3275. https://doi.org/10.3390/s18103275
Kim E. Analysis of DME/DME Navigation Performance and Ground Network Using Stretched-Front-Leg Pulse-Based DME. Sensors. 2018; 18(10):3275. https://doi.org/10.3390/s18103275
Chicago/Turabian StyleKim, Euiho. 2018. "Analysis of DME/DME Navigation Performance and Ground Network Using Stretched-Front-Leg Pulse-Based DME" Sensors 18, no. 10: 3275. https://doi.org/10.3390/s18103275
APA StyleKim, E. (2018). Analysis of DME/DME Navigation Performance and Ground Network Using Stretched-Front-Leg Pulse-Based DME. Sensors, 18(10), 3275. https://doi.org/10.3390/s18103275