Void Hole Avoidance for Reliable Data Delivery in IoT Enabled Underwater Wireless Sensor Networks


 ,
, 
Abstract
1. Introduction
- Two techniques, A-DBR and B-DBR, are proposed to avoid void holes.
- Two techniques, CA-DBR and C-DBR, are proposed to avoid collision and minimize the packet drop ratio.
- C-DBR selects the forwarder node with the maximum residual energy in order to enhance the lifetime of the network.
- The proposed schemes are compared with WDFAD-DBR in terms of average packet delivery ratio, energy tax, end-to-end delay and accumulative propagation distance.
2. Related Work and Problem Statement
2.1. Problem Statement
3. Background
3.1. System Model
3.1.1. Energy Consumption Model
3.1.2. Delay Propagation Model
3.1.3. Packet Types
3.1.4. Explanation of Algorithm 1
| Algorithm 1 Algorithm for forwarding data packets |
| Node i receives from node j |
| Obtain and |
| Calculate distance relative to |
| Calculate corresponding to distance and |
| SWITCH |
| CASE 1: |
| if node i is the preferable forwarder node of node j then |
| send ack |
| end if |
| Hold for next data packet |
| END CASE |
| CASE 2: |
| if node j is the preferable forwarder node of node i then |
| up-to-date entry neighbor_tablemaking use of item () |
| end if |
| END CASE |
| CASE 3: |
| Move to the next step |
| END CASE |
| END SWITCH |
| if selected node i is not the preferable forwarder node of then |
| Upgrade using item () |
| Drop |
| end if |
| if node i is the preferable forwarder node of then |
| Obtain source ID, packet ID from |
| if (source ID, packet ID) within the queue then |
| Drop |
| end if |
| if the node is within the forwarding area then |
| Move to the next step |
| else |
| Hold for the next |
| end if |
| end if |
| Find the next in |
| if is empty then |
| Drop |
| end if |
| Upgrade the depth in with |
| Add (source ID, packet ID) into the queue |
- If the node is not within the effective forwarding range of the preceding hop, it solely updates its neighbor table. In the other case, it enqueues information if it finds no report regarding the packet in the packet queue.
- If the node is not within the forwarding area, it will wait for the subsequent packet; this means that the packet is inside the suppression area. In any other case, the node searches for neighboring nodes in the neighbor table.
- If the neighbor table is empty, it will directly drop the data packet, as there are no nodes in the forwarding area. Thus, void holes can be prevented earlier.
4. Proposed Schemes
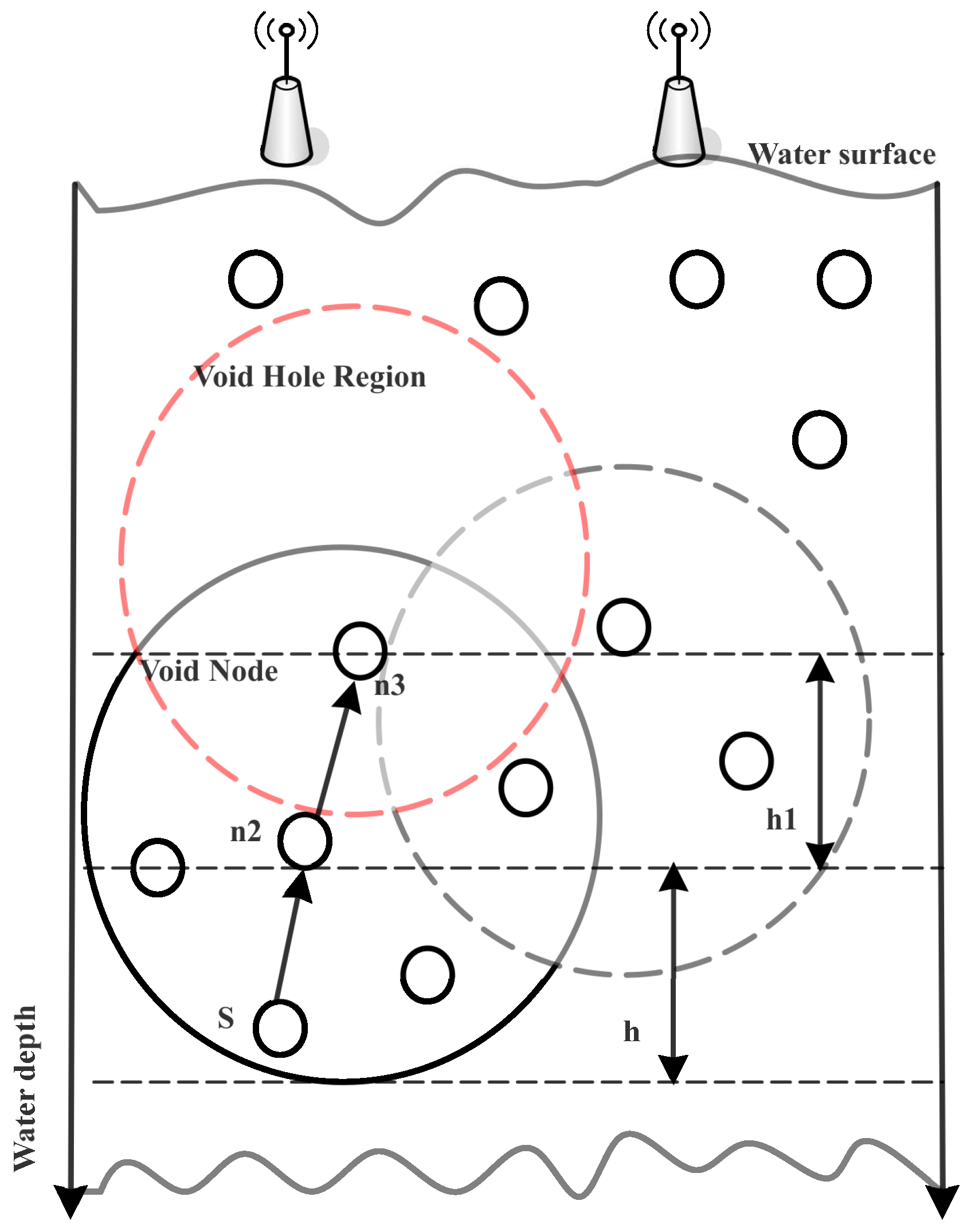
4.1. A-DBR
- If the node is not within the effective forwarding range of the preceding hop, it solely updates its neighbor table. In any other case, it enqueues information if it finds no report about the packets in queue.
- If the node is not within the forwarding area, it will wait for the subsequent packet, this means that the packet is inside the suppression area. In any other case, the node searches for nodes in the neighbor table.
- If the table is empty, instead of dropping a packet, the source node adjusts its transmission range and updates the neighbor table to avoid the void hole.
- After updating the neighbor table, it is going to send the packet if no different transmission of the data packet is heard towards the destination. It then updates the packet queue.
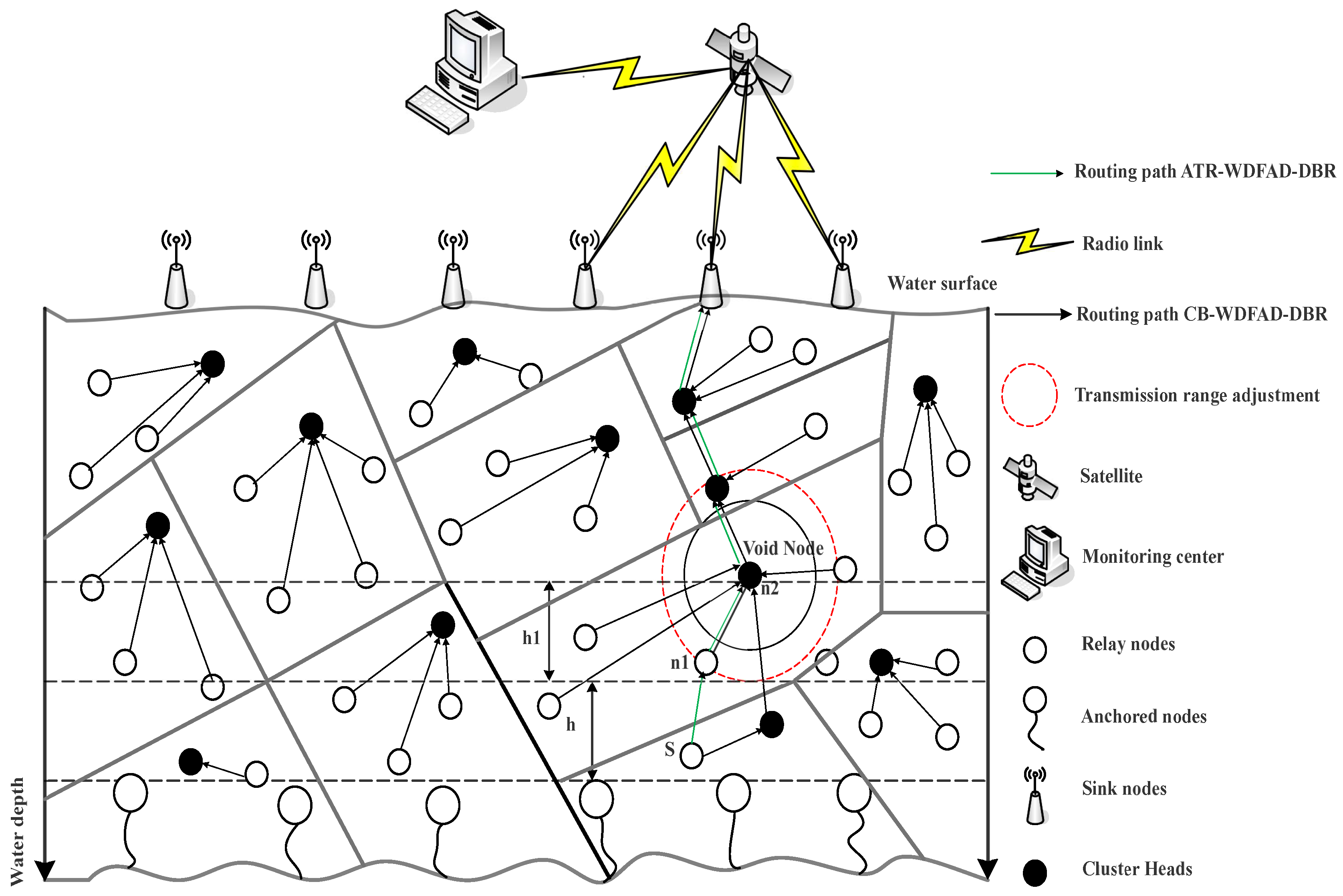
4.2. C-DBR
- If the node is not within the effective forwarding range of a preceding hop, it solely updates its neighbor table without forwarding the packet. In any other case, it enqueues information if there is no report about the packet in the packet queue.
- If the node is not within the forwarding area, it will wait for the subsequent data packet; this means that the packet is inside the suppression area. Otherwise, the node searches for neighboring nodes in the neighbor table.
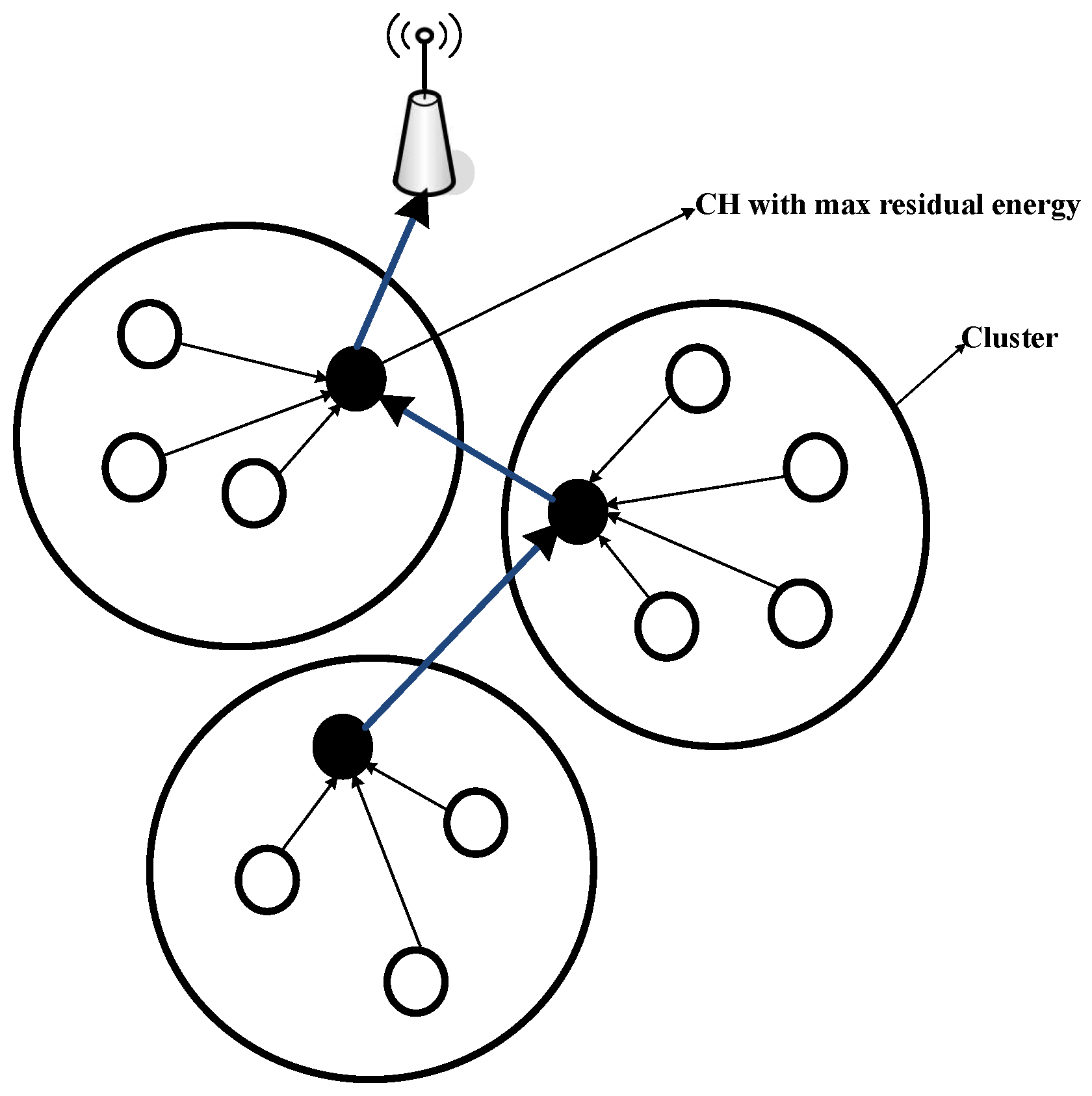
- Initially, there are no clusters in the network.
- The network is then divided into clusters using the k-means clustering approach.
- The source node broadcasts the message in the cluster.
- The sensor node then compares its own energy with the source node energy.
- If the sensor node energy is greater than the source node energy, then the sensor node sends a reply message; else, the source node waits for another reply from the neighbor node that has the maximum residual energy.
- Once the CHs are selected, clusters are formed using the neighbor nodes within the communication range.
- CH then broadcasts the message to the member nodes along with its ID to receive the data packets.
- CHs aggregates data to transmit a single data packet towards the sink directly or using the multi-hop forwarding approach.
- The neighbor table and packet queue are updated repeatedly till the death of all the network nodes.
4.3. B-DBR
Explanation of Algorithm 2
| Algorithm 2 Main steps of the B-DBR scheme |
| if void node or known sinks = 0 then |
| Queue the data packets |
| Re-schedule forward data packet() |
| else |
| ⟵ |
| if then |
| Forward the data packet |
| else |
| Queue the data packet |
| Re-schedule |
| Proposed_mechanism() |
| end if |
| end if |
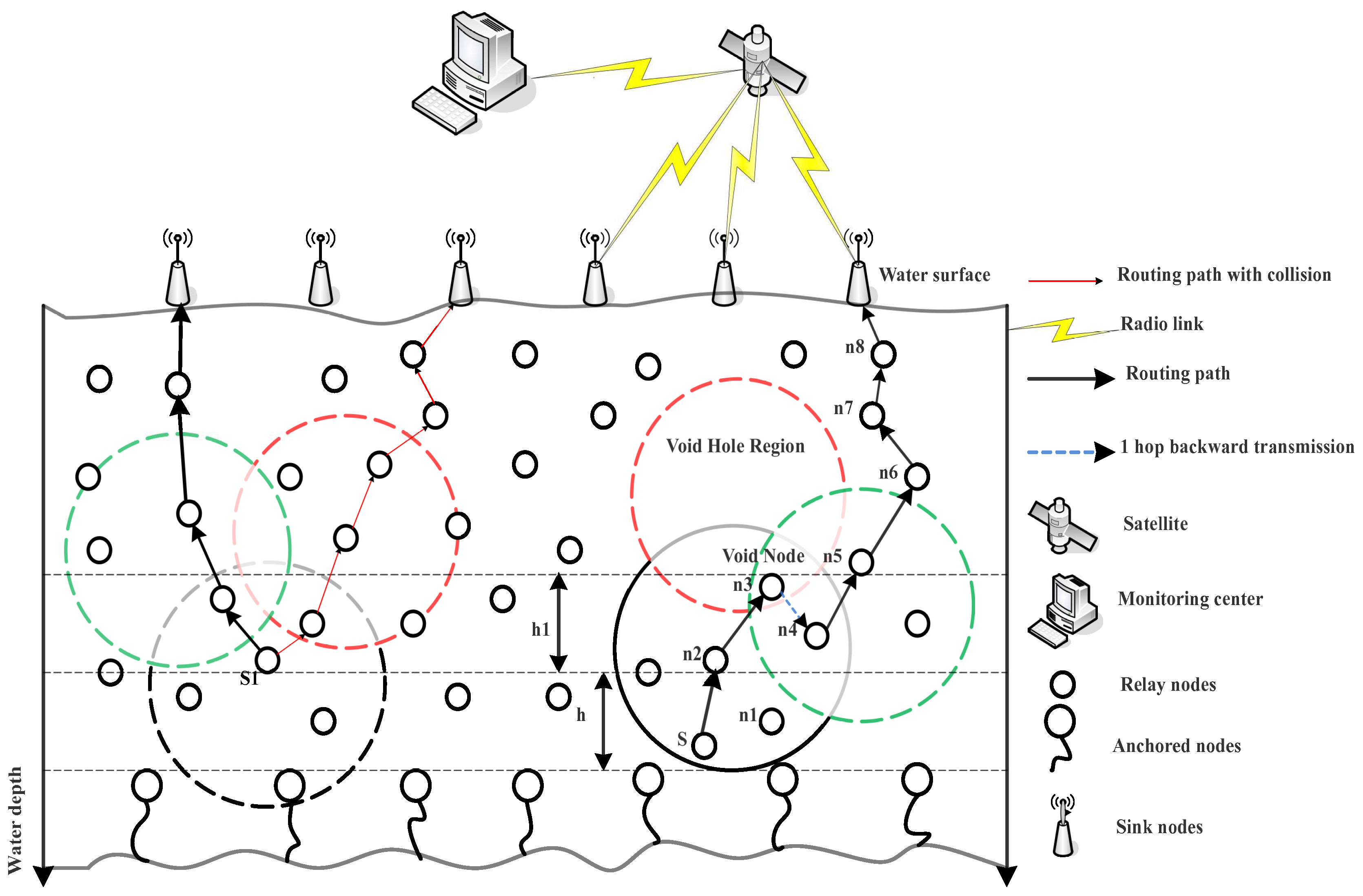
4.4. CA-DBR
- If the node is not within the effective forwarding range of the preceding hop, it does not forward the data packet, and it solely updates its neighbor table. Moreover, it enqueues information if the packet has not been transmitted already.
- Whereas, if the node is not within the transmission range of the forwarding node, then it will wait for the subsequent data packet. This means that the packet is inside the suppression area. This will reduce the collision and interference on the acoustic channel.
- The fall back and nomination of forwarder node mechanisms are used together for minimal energy consumption and a high packet delivery ratio.
- After updating the neighbor table, if no different transmission of the packet is heard towards the destination, it forwards the packet towards the sink node.
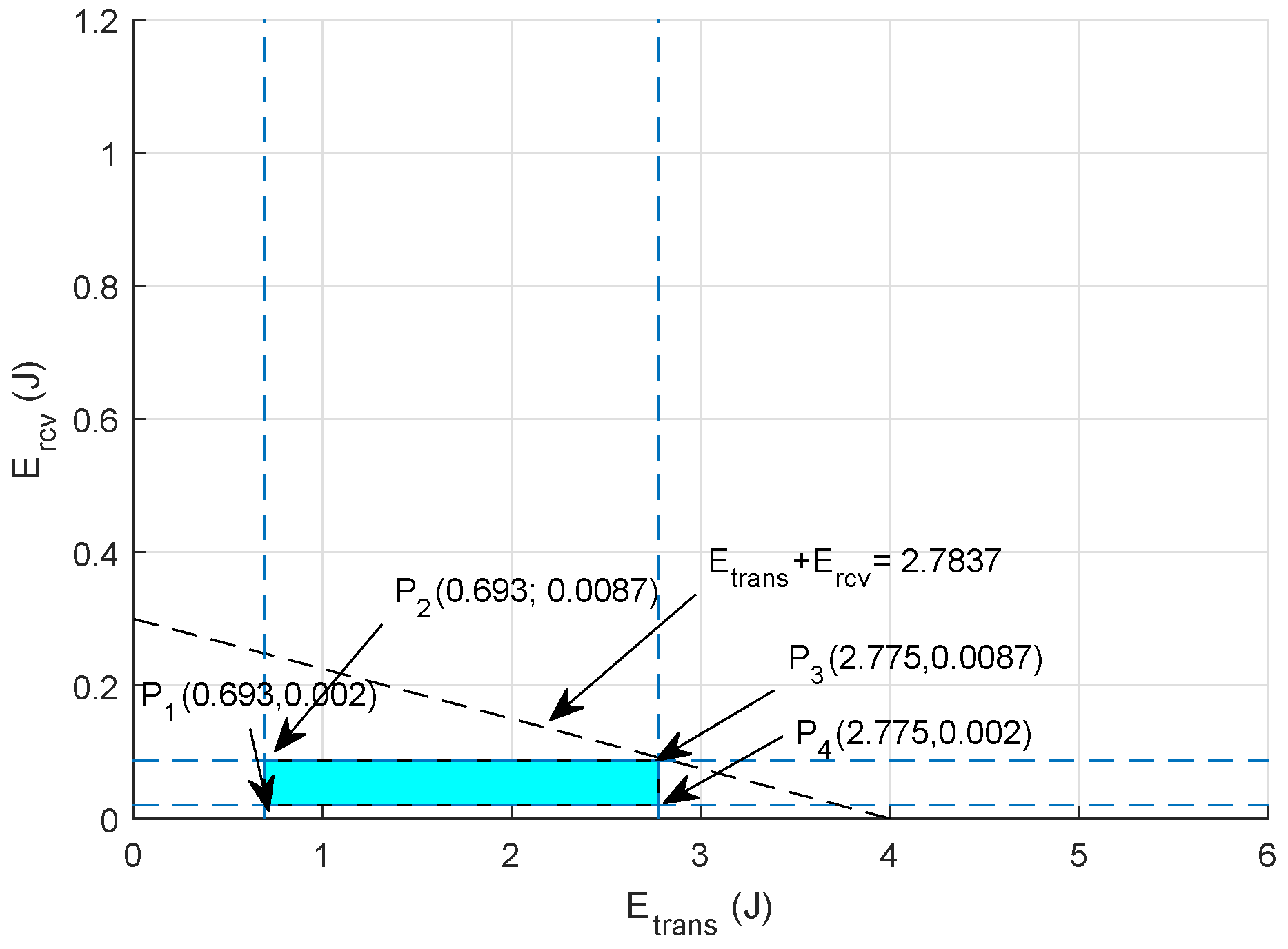
5. Linear Programming-Based Mathematical Formulation
5.1. Feasible Region Energy Minimization
Graphical Analysis
- J
- J
- J
- J
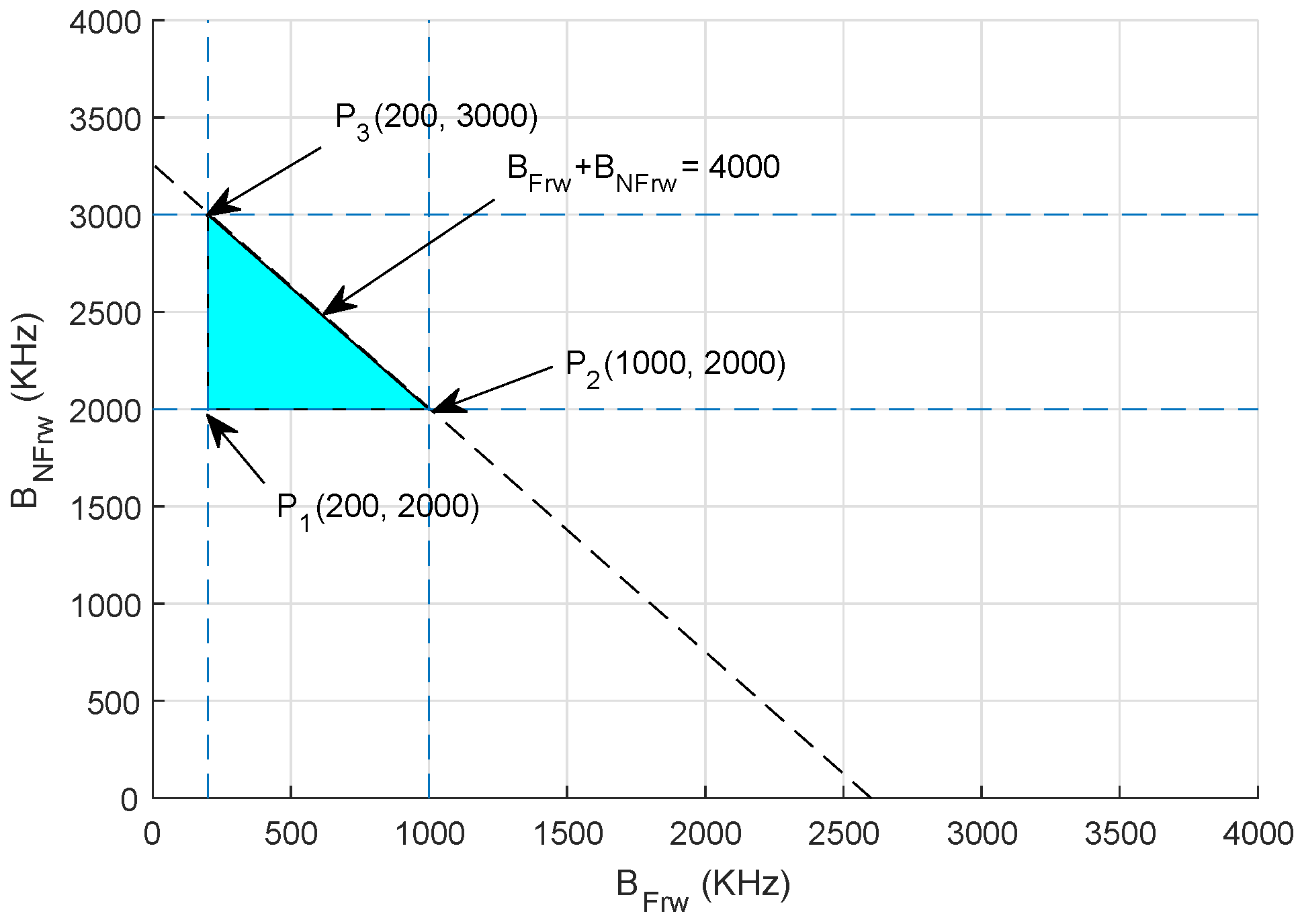
5.2. Throughput Maximization
Graphical Analysis
- kHz
- kHz
- kHz
6. Simulation Results
6.1. Simulation Setup
6.2. Metrics
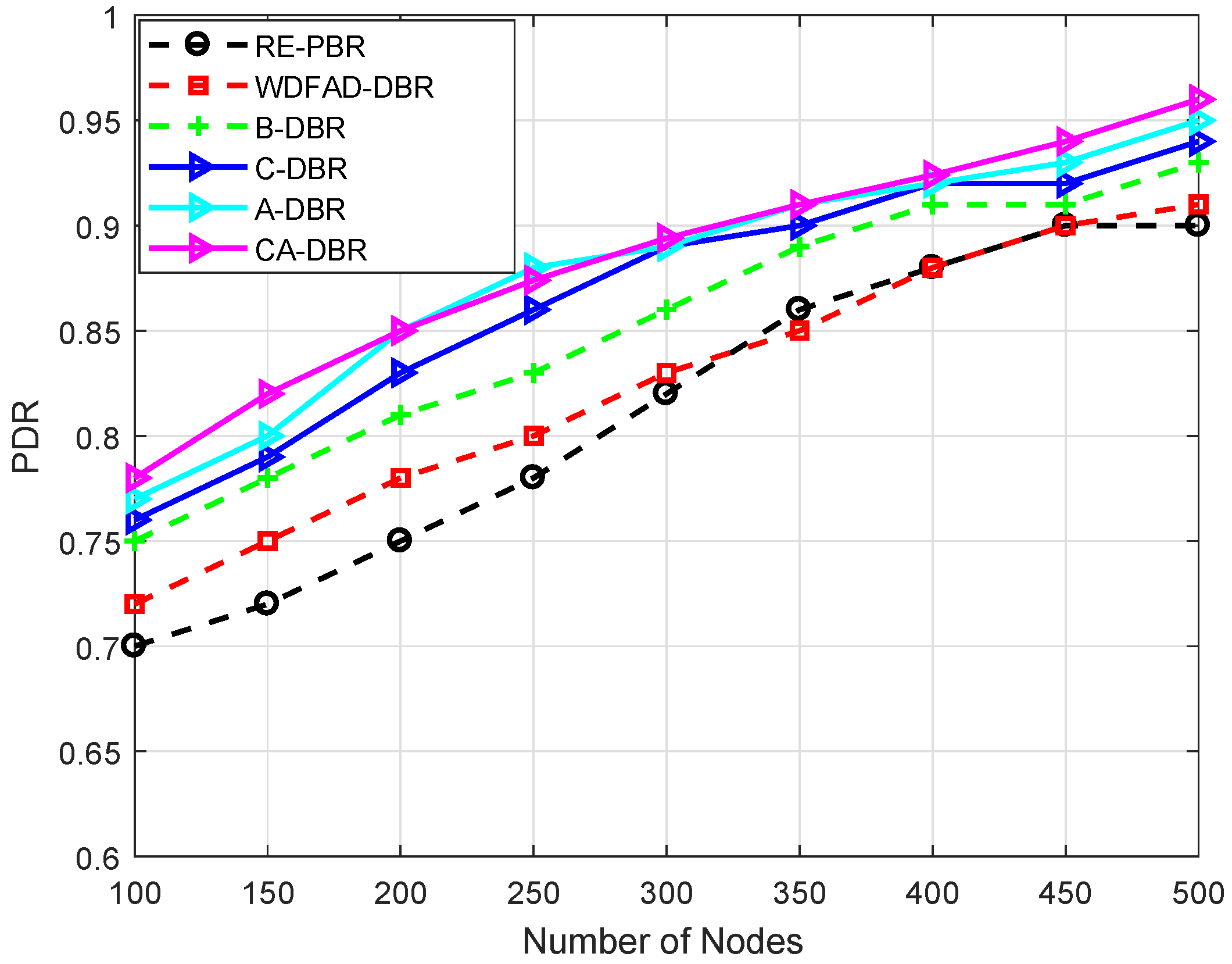
- Average PDR: It is defined as the total amount of data packets successfully received at the sink node to the total number of packets generated by the network nodes. It is calculated as: .
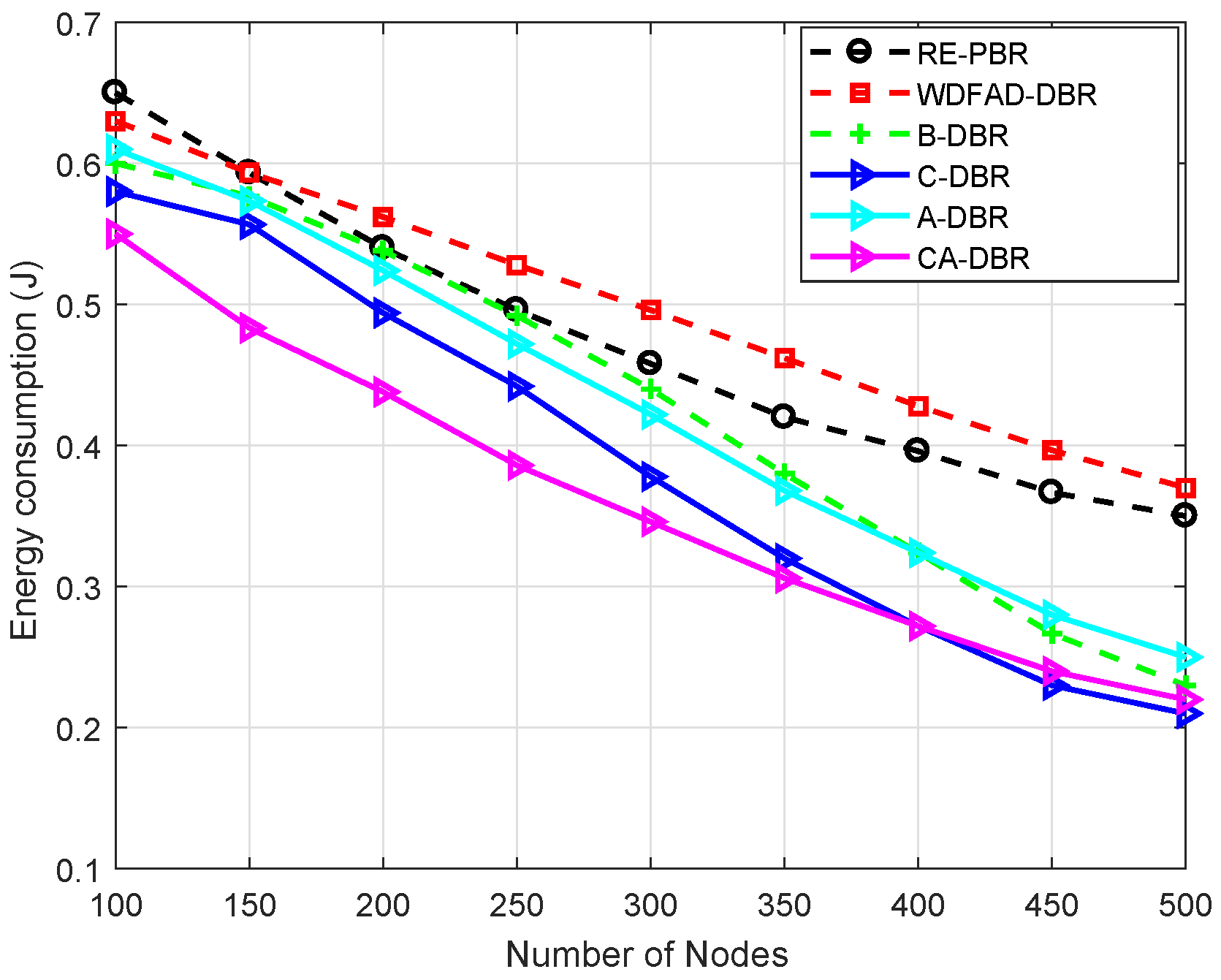
- Average energy tax: It is defined as the average energy consumption per node when a data packet is sent successfully to the sink. It is measured in joules (J). It is computed according to Equation (6).
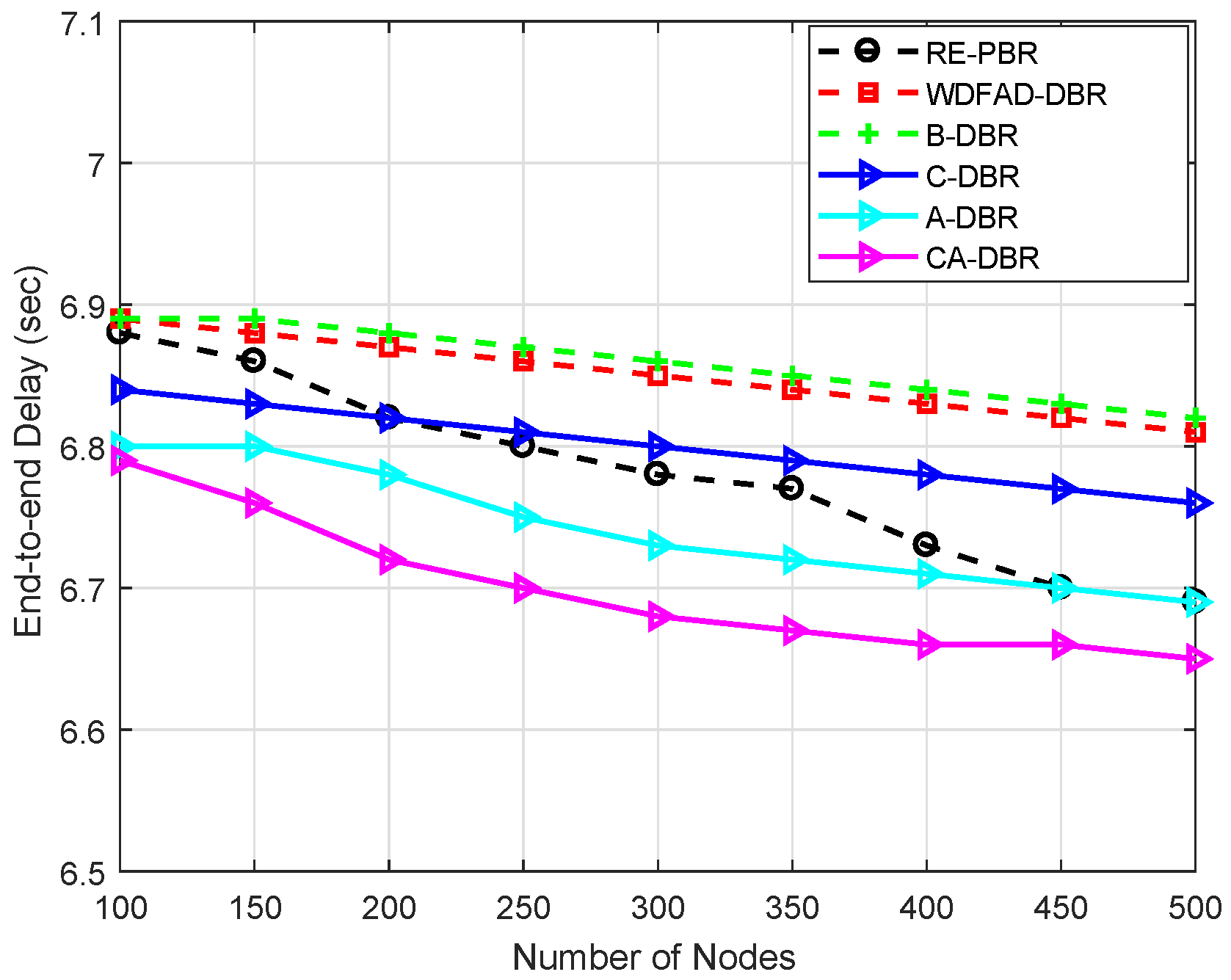
- Average end-to-end delay: It is defined as the average time to transmit data from the source to the destination successfully. It is measured in seconds (s). The expression to find out complete path delay is: . h is the hop count of nodes i and j. Vshows the speed of the acoustic signal, and is the distance between node i and j.
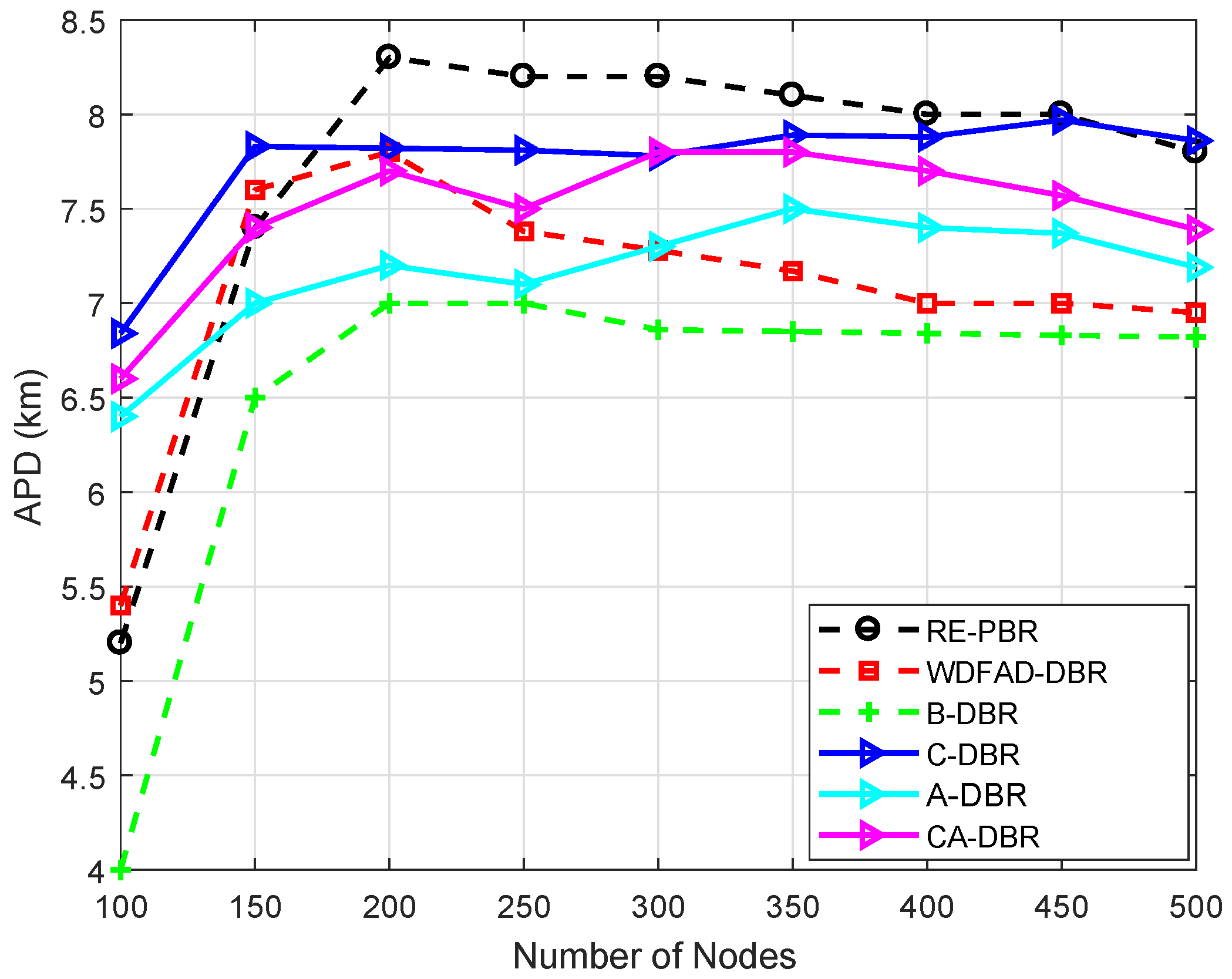
- Average APD: It is the average accumulated propagation distance of all the data packets that are successfully sent to the sink nodes. It is measured in kilometers (km). The mathematical formulation is as follows: .
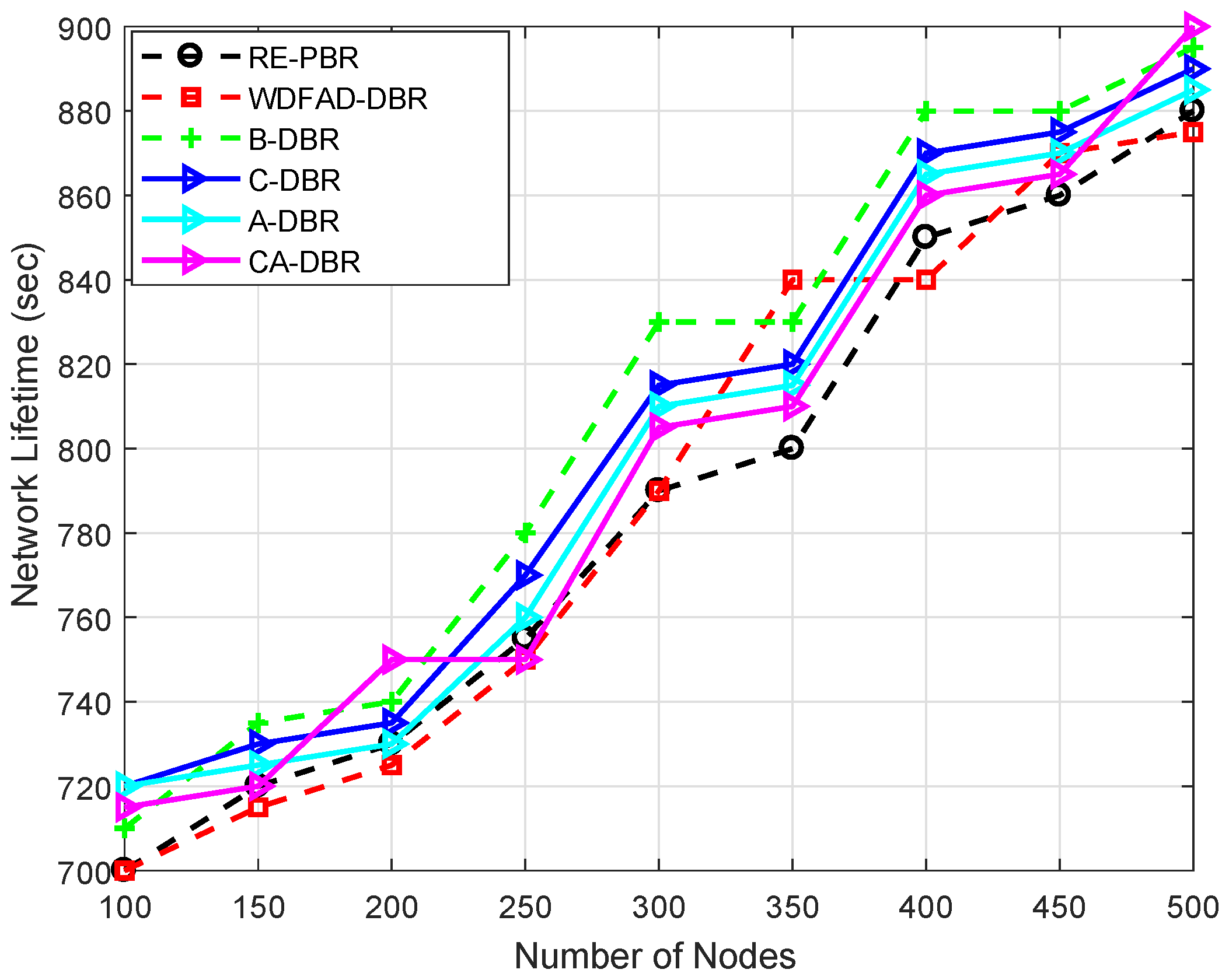
- Network lifetime: It is the time period for which the network remained operational. It is measured in seconds (s). The mathematical expression is: , where shows the network lifetime in unit time (t).
- Packet drop ratio: It is defined as the ratio of the number of packets transmitted, however not delivered successfully at the destination node. It is formulated as .
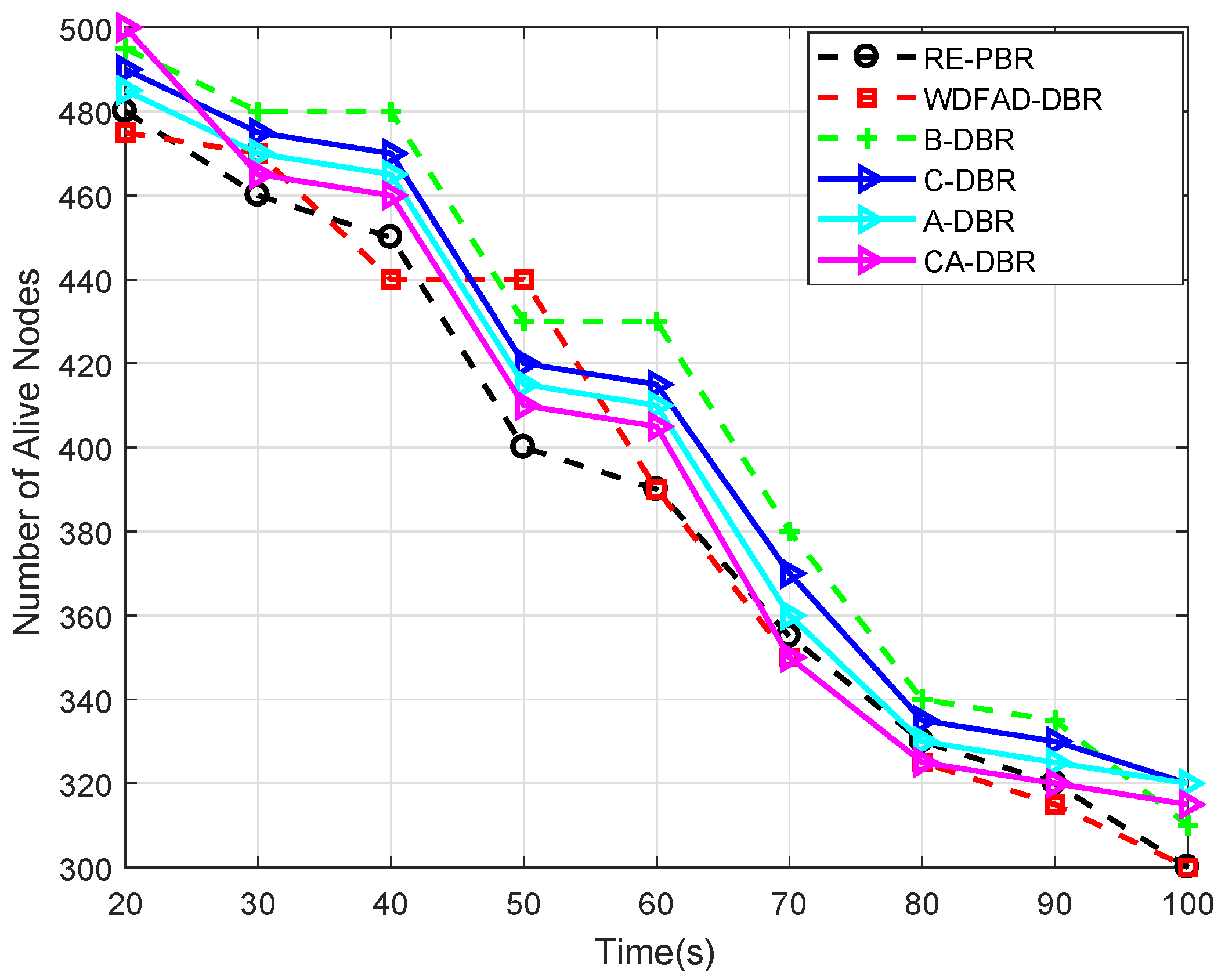
- Alive nodes: It is the total number of nodes still alive after the termination of network operations. The mathematical expression is , where is the number of alive nodes, denotes the quantity of dead nodes after complete battery depletion and N depicts the total number of nodes deployed in the network.
6.3. Performance Comparison
6.3.1. Energy Tax
6.3.2. End-to-End Delay
6.3.3. PDR
6.3.4. APD
6.3.5. Alive Nodes
6.3.6. Network Lifetime
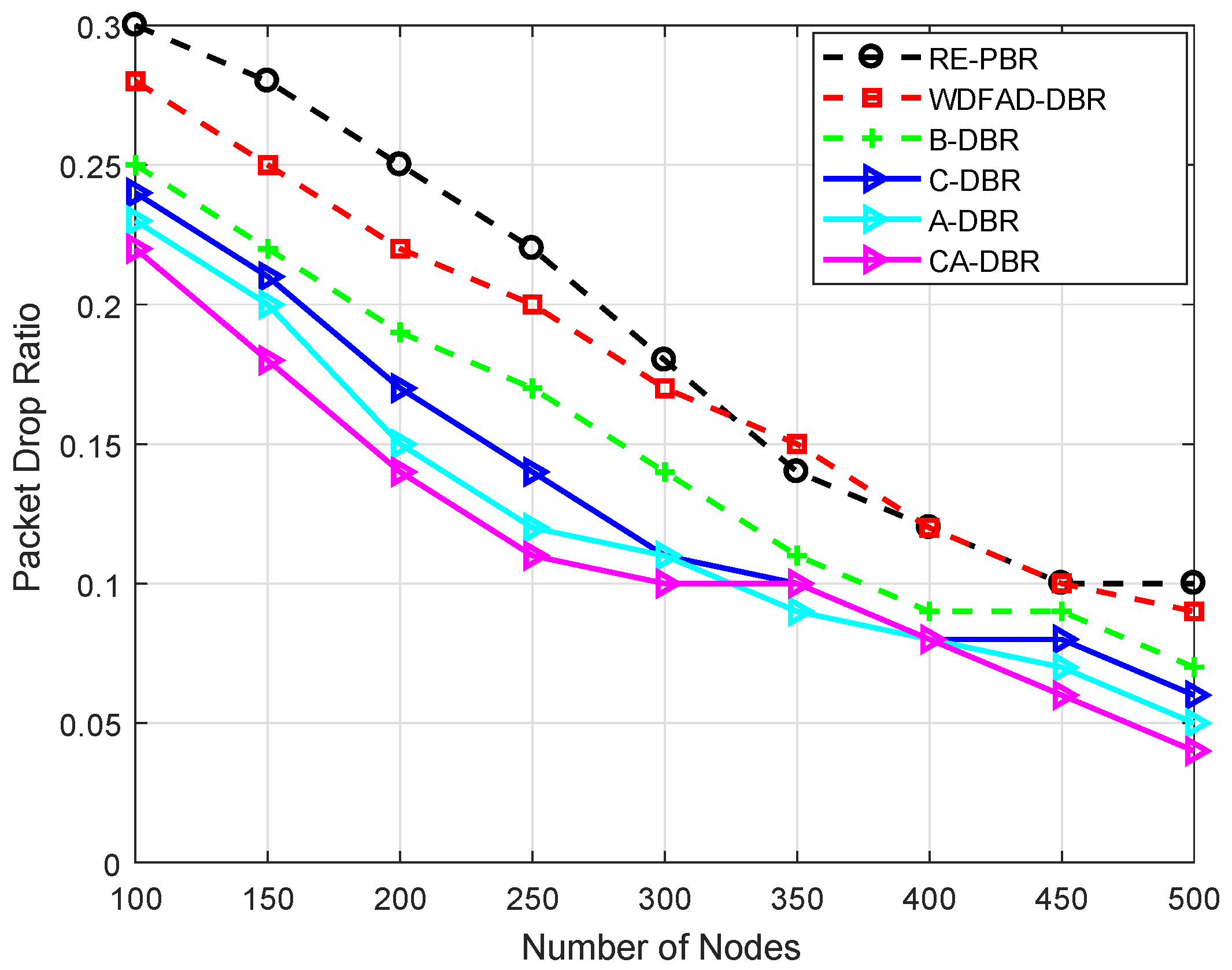
6.3.7. Packet Drop Ratio
7. Performance Trade-Offs
8. Conclusions
Author Contributions
Conflicts of Interest
References
- Yu, H.; Yao, N.; Liu, J. An adaptive routing protocol in underwater sparse acoustic sensor networks. Ad Hoc Netw. 2015, 34, 121–143. [Google Scholar] [CrossRef]
- Coutinho, R.W.; Boukerche, A.; Vieira, L.F.; Loureiro, A.A. Underwater Wireless Sensor Networks: A New Challenge for Topology Control-Based Systems. ACM Comput. Surv. 2018, 51, 19. [Google Scholar] [CrossRef]
- Coutinho, R.W.L.; Boukerche, A.; Vieira, L.F.M.; Loureiro, A.A.F. A novel void node recovery paradigm for longterm underwater sensor networks. Ad Hoc Netw. 2015, 34, 144–156. [Google Scholar] [CrossRef]
- Yu, H.; Yao, N.; Wang, T.; Li, G.; Gao, Z.; Tan, G. WDFAD-DBR: Weighting depth and forwarding area division DBR routing protocol for UASNs. Ad Hoc Netw. 2016, 37, 256–282. [Google Scholar] [CrossRef]
- Jiang, S. On reliable data transfer in underwater acoustic networks: A survey from networking perspective. IEEE Commun. Surv. Tutor. 2018, 20, 1036–1055. [Google Scholar] [CrossRef]
- Kheirabadi, M.T.; Mohamad, M.M. Greedy routing in underwater acoustic sensor networks: A survey. Int. J. Distrib. Sens. Netw. 2013, 9, 701834. [Google Scholar] [CrossRef]
- Li, N.; Martínez, J.F.; Chaus, J.M.M.; Eckert, M. A survey on underwater acoustic sensor network routing protocols. Sensors 2016, 16, 414. [Google Scholar] [CrossRef] [PubMed]
- Han, G.; Jiang, J.; Bao, N.; Wan, L.; Guizani, M. Routing protocols for underwater wireless sensor networks. IEEE Commun. Mag. 2015, 53, 72–78. [Google Scholar] [CrossRef]
- Mitra, S.; Roy, A. Communication void free routing protocol in wireless sensor network. Wirel. Pers. Commun. 2015, 82, 2567–2581. [Google Scholar] [CrossRef]
- Khasawneh, A.; Latiff, M.S.B.A.; Kaiwartya, O.; Chizari, H. A reliable energy-efficient pressure-based routing protocol for underwater wireless sensor network. Wirel. Netw. 2018, 24, 2061–2075. [Google Scholar] [CrossRef]
- Farhan, L.; Kharel, R.; Kaiwartya, O.; Hammoudeh, M.; Adebisi, B. Towards green computing for Internet of things: Energy oriented path and message scheduling approach. Sustain. Cities Soc. 2018, 38, 195–204. [Google Scholar] [CrossRef]
- Kaiwartya, O.; Abdullah, A.H.; Cao, Y.; Lloret, J.; Kumar, S.; Shah, R.R.; Prasad, M.; Prakash, S. Virtualization in wireless sensor networks: Fault tolerant embedding for internet of things. IEEE Internet Things J. 2018, 5, 571–580. [Google Scholar] [CrossRef]
- Aliyu, A.; Abdullah, A.H.; Kaiwartya, O.; Cao, Y.; Lloret, J.; Aslam, N.; Joda, U.M. Towards video streaming in IoT Environments: Vehicular communication perspective. Comput. Commun. 2018, 118, 93–119. [Google Scholar] [CrossRef]
- Faheem, M.; Tuna, G.; Gungor, V.C. LRP: Link quality aware queue based spectral clustering routing protocol for underwater acoustic sensor networks. Int. J. Commun. Syst. 2017, 30, e3257. [Google Scholar] [CrossRef]
- Coutinho, R.W.; Boukerche, A.; Vieira, L.F.; Loureiro, A.A. Geographic and opportunistic routing for underwater sensor networks. IEEE Trans. Comput. 2016, 65, 548–561. [Google Scholar] [CrossRef]
- Noh, Y.; Lee, U.; Lee, S.; Wang, P.; Vieira, L.F.; Cui, J.H.; Gerla, M.; Kim, K. Hydrocast: Pressure routing for underwater sensor networks. IEEE Trans. Veh. Technol. 2016, 65, 333–347. [Google Scholar] [CrossRef]
- Abbas, M.Z.; Bakar, K.A.; Ayaz, M.; Mohamed, M.H.; Tariq, M. Hop-by-Hop Dynamic Addressing Based Routing Protocol for Monitoring of long range Underwater Pipeline. KSII Trans. Internet Inf. Syst. 2017, 11, 731–763. [Google Scholar]
- Javaid, N.; Jafri, M.R.; Ahmed, S.; Jamil, M.; Khan, Z.A.; Qasim, U.; Al-Saleh, S.S. Delay-sensitive routing schemes for underwater acoustic sensor networks. Int. J. Distrib. Sens. Netw. 2015, 11, 532676. [Google Scholar] [CrossRef]
- Yadav, S.; Kumar, V. Optimal Clustering in Underwater Wireless Sensor Networks: Acoustic, EM and FSO Communication Compliant Technique. IEEE Access 2017, 5, 12761–12776. [Google Scholar] [CrossRef]
- Sasikala, V.; Chandrasekar, C. Cluster based Sleep/Wakeup Scheduling Technique for WSN. Int. J. Comput. Appl. 2013, 72, 15–20. [Google Scholar]
- Yu, S.; Liu, S.; Jiang, P. A High-Efficiency Uneven Cluster Deployment Algorithm Based on Network Layered for Event Coverage in UWSNs. Sensors 2016, 16, 2103. [Google Scholar] [CrossRef] [PubMed]
- Rao, P.S.; Jana, P.K.; Banka, H. A particle swarm optimization based energy efficient cluster head selection algorithm for wireless sensor networks. Wirel. Netw. 2017, 23, 2005–2020. [Google Scholar] [CrossRef]
- Sher, A.; Javaid, N.; Azam, I.; Ahmad, H.; Abdul, W.; Ghouzali, S.; Niaz, I.A.; Khan, F.A. Monitoring square and circular fields with sensors using energy-efficient cluster-based routing for underwater wireless sensor networks. Int. J. Distrib. Sensor Netw. 2017, 13, 1550147717717189. [Google Scholar] [CrossRef]
- Yan, H.; Shi, Z.J.; Cui, J.H. DBR: Depth-based routing for underwater sensor networks. In Networking 2008 Ad Hoc and Sensor Networks, Wireless Networks, Next Generation Internet; Springer: Berlin, Germany, 2008; pp. 72–86. [Google Scholar]
- Javaid, N.; Jafri, M.R.; Khan, Z.A.; Qasim, U.; Alghamdi, T.A.; Ali, M. Iamctd: Improved adaptive mobility of courier nodes in threshold-optimized dbr protocol for underwater wireless sensor networks. Int. J. Distrib. Sens. Netw. 2014, 10, 213012. [Google Scholar] [CrossRef]
- Zhou, Z.; Yao, B.; Xing, R.; Shu, L.; Bu, S. E-CARP: An energy efficient routing protocol for UWSNs in the internet of underwater things. IEEE Sens. J. 2015, 16, 4072–4082. [Google Scholar] [CrossRef]
- Kong, L.; Ma, K.; Qiao, B.; Guo, X. Adaptive relay chain routing with load balancing and high energy efficiency. IEEE Sens. J. 2016, 16, 5826–5836. [Google Scholar] [CrossRef]
- Ahmad, A.; Javaid, N.; Khan, Z.A.; Qasim, U.; Alghamdi, T.A. (ACH)2: Routing Scheme to Maximize Lifetime and Throughput of Wireless Sensor Networks. IEEE Sens. J. 2014, 14, 3516–3532. [Google Scholar] [CrossRef]
- Yildiz, H.U.; Gungor, V.C.; Tavli, B. Packet Size Optimization for Lifetime Maximization in Underwater Acoustic Sensor Networks. IEEE Trans. Ind. Inform. 2018. [Google Scholar] [CrossRef]
- Bu, R.; Wang, S.; Wang, H. Fuzzy logic vector-based forwarding routing protocol for underwater acoustic sensor networks. Trans. Emerg. Telecommun. Technol. 2018, 29, e3252. [Google Scholar] [CrossRef]
- Khalid, M.; Cao, Y.; Ahmad, N.; Khalid, W.; Dhawankar, P. Radius-based multipath courier node routing protocol for acoustic communications. IET Wirel. Sens. Syst. 2018, 8, 183–189. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Technique | Features | Achievements | Limitations |
|---|---|---|---|
| AHH-VBF [1] | Location-aware routing protocol, concept of adaptive virtual pipeline | Reduced duplicate packets and unnecessary energy consumption is avoided | Void hole problem exists |
| GEDAR [15] | GEographic and opportunistic routing with Depth Adjustment-based topology control for communication | Void hole avoidance results in increased performance of the network | High energy consumption and high end-to-end delay |
| HydroCast [16] | Pressure-based routing protocol and efficient anycast routing algorithm | Improved packet delivery ratio | Low performance and increased energy consumption |
| H2-DARP-PM [17] | Hop-by-Hop Dynamic Addressing-based routing protocol for Pipeline Monitoring | Improved packet delivery ratio | High energy consumption |
| Delay-sensitive schemes [18] | Improved delay-sensitive versions, adaptable to time-critical applications | Minimize end-to-end delay and improve performance and network lifetime | Duplication of packets occurs, high energy consumption and void hole problem exists |
| ACH [28] | Free association mechanism where nodes associate with CHs | Minimizing energy consumption and enhances network lifetime | Transmission delay |
| FSO and EM wave-based communication schemes [19] | Free Space Optical and electromagnetic wave-based communication schemes | Reduced energy consumption | High end-to-end delay |
| CBSST [20] | Cluster-Based Sleep/wakeup Scheduling Technique for WSN | Reduced energy consumption, enhanced network lifetime and packet delivery ratio | Keeping the same CH throughout the network lifetime causes problems for network lifetime |
| UCBNL [21] | A high efficiency Uneven Cluster deployment algorithm Based on Network Layered for event coverage in UWSNs | Enhanced packet delivery ratio, less energy consumption and improved network lifetime | Irregular clustering causes alteration in the network |
| PSO-ECHS [22] | Energy-efficient CH Selection that is based on particle swarm optimization | Energy efficiency achieved | Only for homogeneous networks |
| EDDEEC [29] | Enhanced Developed Distributed Energy-Efficient Clustering | Shows improved performance in terms of stability period, network lifetime and packet delivery ratio. | Imbalanced clustering and reelection increases overhead |
| Energy-efficient routing protocol [23] | SEEC, CSEEC and CDSEEC for UWSNs | Reduced energy consumption | Low packet delivery ratio |
| DBR [24] | Handles dynamic networks efficiently, requires only local depth information and greedy forwarding | Improved network lifetime and packet delivery ratio | Void holes, increased energy consumption and high end-to-end delay |
| iAMCTD [25] | Location-free routing protocol specially designed for time-critical applications | Improved network lifetime, minimized end-to-end delay | Void holes still exist & overhead due to control packets’ exchange |
| E-CARP [26] | Distributed cross-layer reactive protocol, important for sensory data collection and transmission | Improved network lifetime and reduced energy consumption | Reduced throughput and high path loss due to mobility |
| ARCR [27] | Network is divided into clusters and mobile nodes used to collect data from other sensor nodes and forward them to the sink | Achieves energy efficiency, maximum network lifetime and load balancing | Network disconnects when the relay nodes are disorganized |
| Parameter | Value |
|---|---|
| Nodes | 100–500 |
| Sinks | 9 |
| Network Dimensions (km) | 10 × 10 × 10 |
| Movement Speed of Nodes (m/s) | 2 |
| Acoustic Propagation Speed (m/s) | 1500 |
| Initial Energy (J) | 100 |
| Transmission Range (km) | 2 |
| Transmission Power (dB reμPa) | 90 |
| Total Bandwidth (kHz) | 4 |
| Sending Energy (W) | 50 |
| Receiving or Idle Energy (mW) | 158 |
| Header Size (bytes) | 11 |
| Payload (bytes) | 72 |
| Data Rate (kbps) | 16 |
| Size of ACK (bits) | 50 |
| Parameters | RE-PBR | WDFAD-DBR | B-DBR | A-DBR | C-DBR | CA-DBR |
|---|---|---|---|---|---|---|
| Network lifetime | 88% | 87% | 89% | 85% | 88.4% | 90% |
| End-to-end delay | 15% | 09% | 10% | 13.6% | 14.6% | 14.8% |
| APD | 22% | 30% | 35.8% | 21% | 27% | 26% |
| PDR | 90% | 91.5% | 93% | 94.2% | 95% | 96% |
| Alive nodes | 60% | 60% | 62% | 64% | 63.3% | 64% |
| Packet drop ratio | 10% | 8.5% | 7% | 5.8% | 5% | 4% |
| Energy consumption | 38% | 39% | 24% | 21% | 26% | 22% |
| Schemes | Features | Achieved Parameters | Trade-Offs |
|---|---|---|---|
| WDFAD-DBR [4] | Routing based on depth and energy | Less packet drops and improved network lifetime, decreased APD | High energy consumption and high end-to-end delay |
| RE-PBR [10] | Routing based on link quality, depth and energy | Improved network lifetime and low delay | High packet drop ratio and more APD |
| A-DBR | Routing based on depth and energy along with transmission range adjustment | Void hole avoidance results in increased performance of the network and reduced energy consumption | High energy consumption in sparse regions and increased APD |
| C-DBR | Routing based on depth and energy along with clustering | Improved PDR, low end-to-end delay and APD | Increased energy consumption due to clustering compared to A-DBR |
| CA-DBR | Routing based on depth and energy with collision avoidance | Reduced energy consumption and low delay | Increased APD |
| B-DBR | Routing based on depth and energy with tracking features | High PDR and reduced delay | Increased APD |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sher, A.; Khan, A.; Javaid, N.; Ahmed, S.H.; Aalsalem, M.Y.; Khan, W.Z. Void Hole Avoidance for Reliable Data Delivery in IoT Enabled Underwater Wireless Sensor Networks. Sensors 2018, 18, 3271. https://doi.org/10.3390/s18103271
Sher A, Khan A, Javaid N, Ahmed SH, Aalsalem MY, Khan WZ. Void Hole Avoidance for Reliable Data Delivery in IoT Enabled Underwater Wireless Sensor Networks. Sensors. 2018; 18(10):3271. https://doi.org/10.3390/s18103271
Chicago/Turabian StyleSher, Arshad, Aasma Khan, Nadeem Javaid, Syed Hassan Ahmed, Mohammed Y Aalsalem, and Wazir Zada Khan. 2018. "Void Hole Avoidance for Reliable Data Delivery in IoT Enabled Underwater Wireless Sensor Networks" Sensors 18, no. 10: 3271. https://doi.org/10.3390/s18103271
APA StyleSher, A., Khan, A., Javaid, N., Ahmed, S. H., Aalsalem, M. Y., & Khan, W. Z. (2018). Void Hole Avoidance for Reliable Data Delivery in IoT Enabled Underwater Wireless Sensor Networks. Sensors, 18(10), 3271. https://doi.org/10.3390/s18103271