Integration of GPS, Monocular Vision, and High Definition (HD) Map for Accurate Vehicle Localization

Abstract
1. Introduction
- (1)
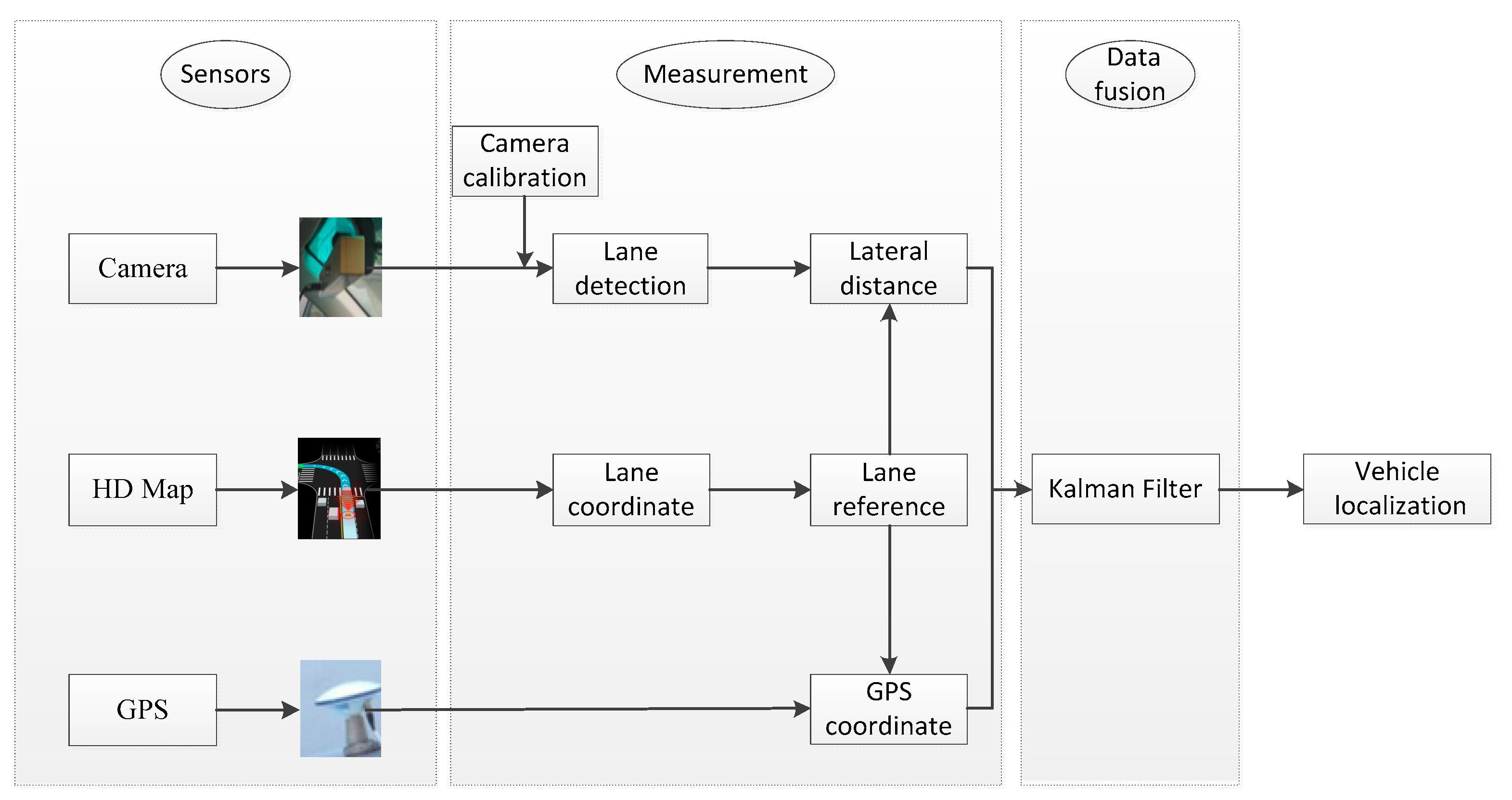
- We propose using linear Kalman filter to fuse GPS, monocular vision, and HD map and developed a low-cost and accurate solution to vehicle localization;
- (2)
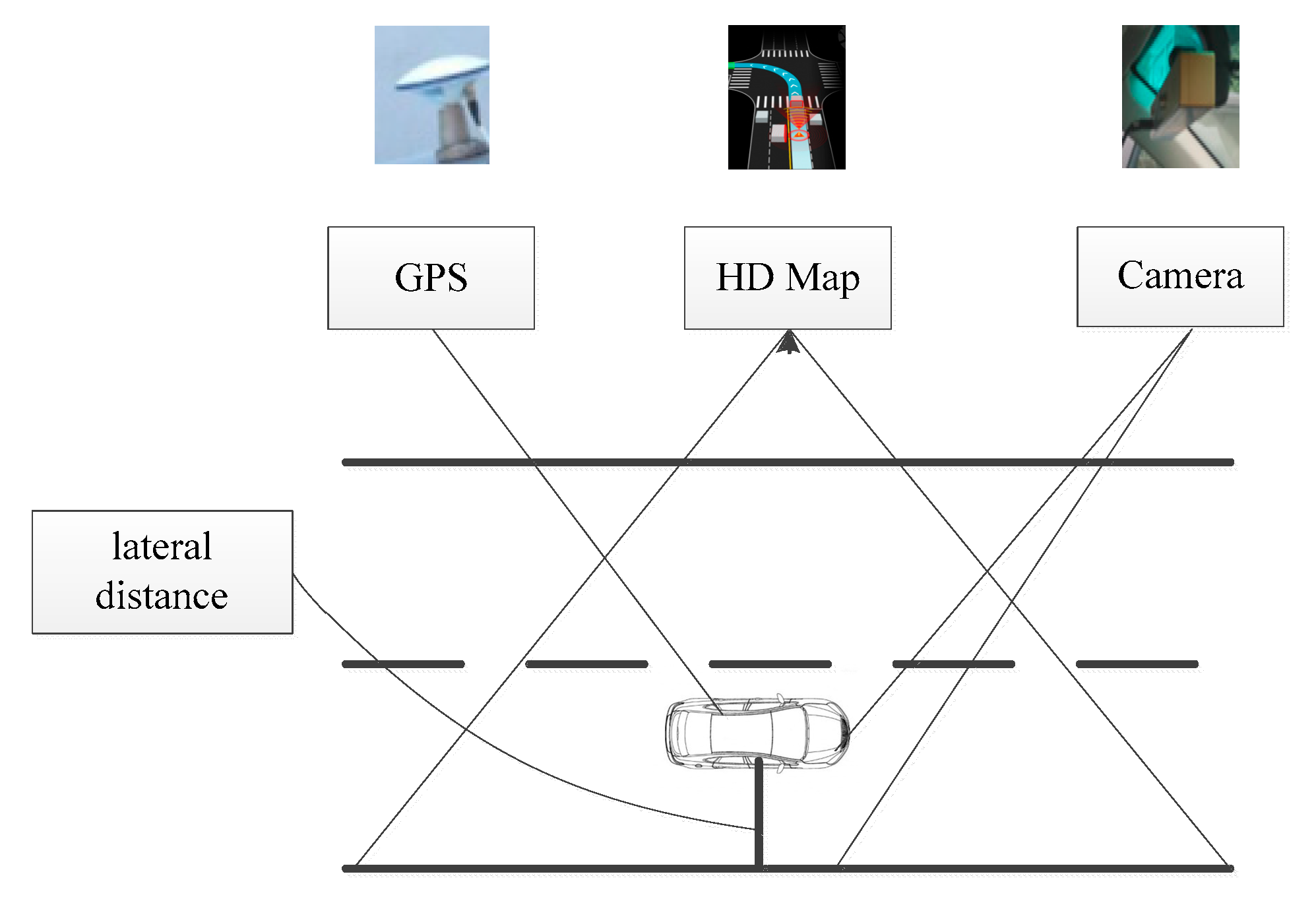
- We propose using HD map to provide reference positions so as to correlate the GPS coordinates and lateral distance from monocular vision, which finally formulates two types of observations or measurements for the developed linear Kalman filter. The HD maps allow the integration of local measurements (i.e., lateral distances from camera) and global measurements into a linear Kalman framework. As a result, we can utilize common lane lines for localization, compared to the unique landmark requirements in existing HD map-based methods;
- (3)
- We develop a data-driven motion model rather than Kinematics one for state prediction and transition for the Kalman filter. The data-driven model is trained from vehicle’s historic trajectories and requires no acceleration or velocity inputs, which therefore requires no high-cost IMU. In addition, it is more flexible and adaptive than the existing Kinematic model used in the literature.
2. The Proposed Methods
2.1. GPS and HD Map
2.2. Lateral Distance Computation from Monocular Vision
2.3. Kalman Filter for GPS, Vision and HD Map Fusion
2.3.1. Data-Driven Motion Model for State Transition
2.3.2. Observations from GPS, Vision, and HD Map
3. Experimental Results and Discussions
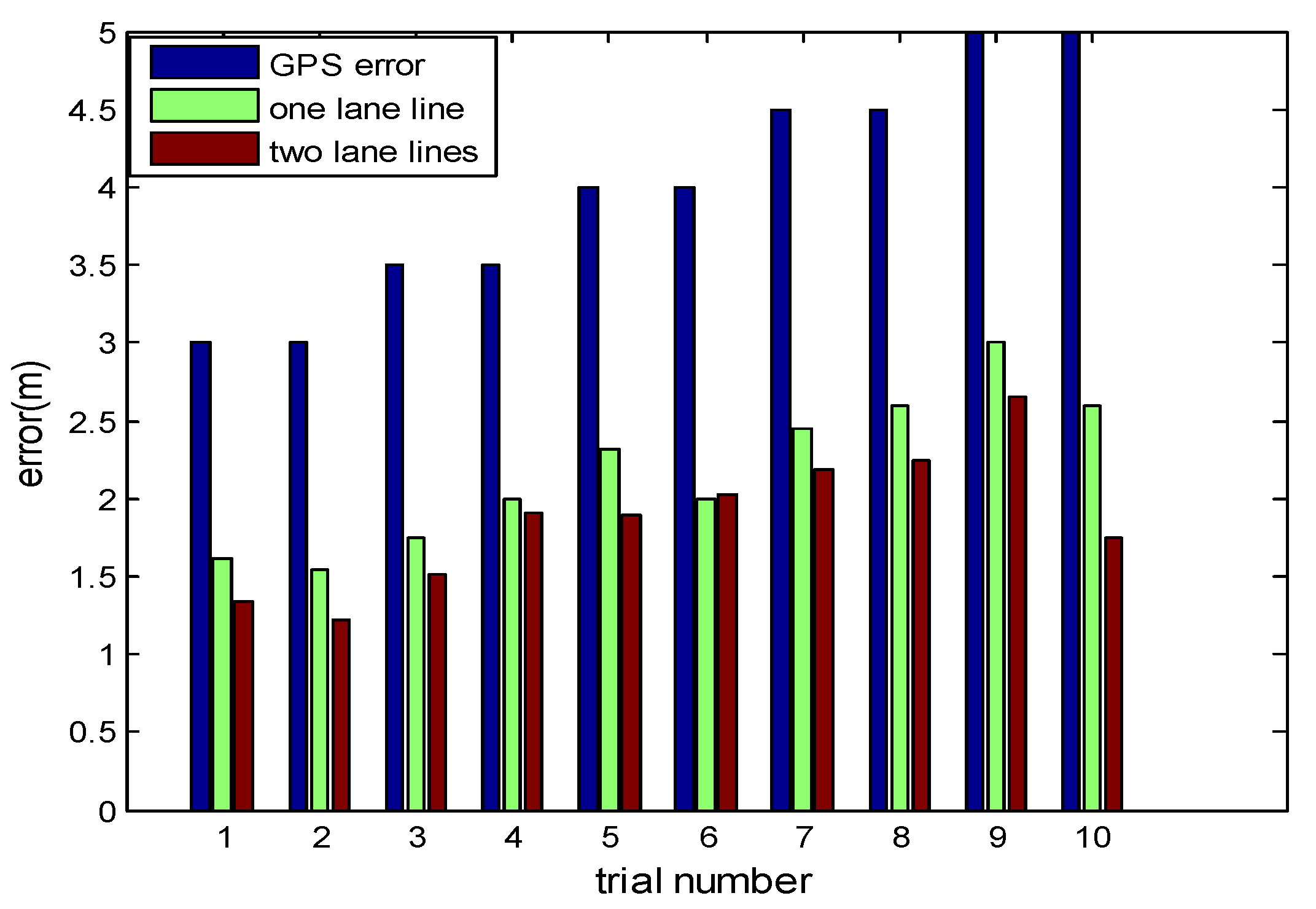
3.1. Test Results with Simulation Data
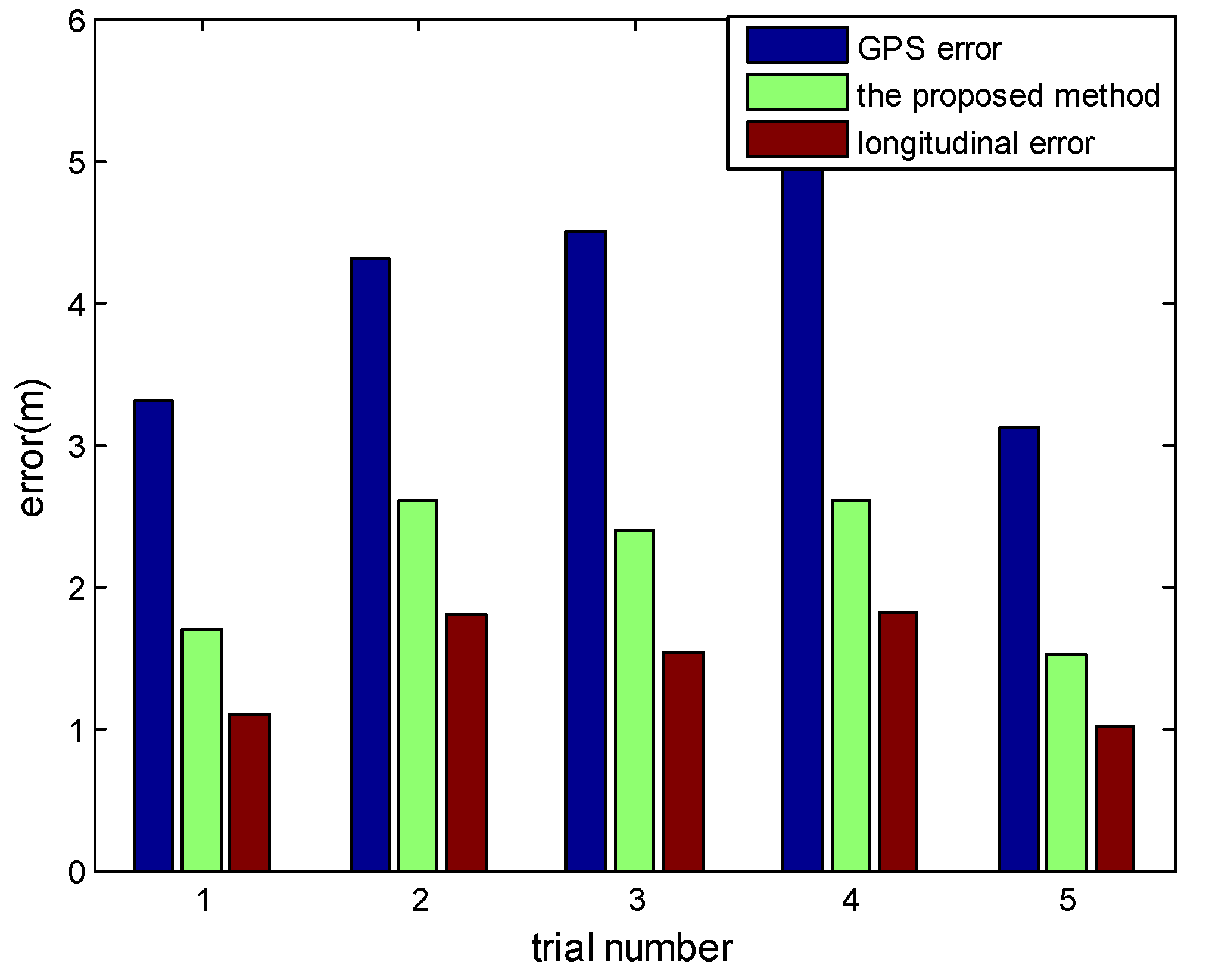
3.2. Test Results with Real Data
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Lee, E.K.; Gerla, M.; Pau, G.; Lee, U.; Li, J.H. Internet of vehicles: from intelligent grid to autonomous cars and vehicular fogs. Int. J. Distrib. Sens. Netw. 2016, 12, 1–12. [Google Scholar] [CrossRef]
- Lu, W.; Sergio, A.; Rodríguez, F.; Emmanuel, S.; Roger, R. Lane Marking-based vehicle localization using low-cost gdps and open source map. Unmanned Syst. 2015, 3, 239–251. [Google Scholar] [CrossRef]
- Xu, L.H.; Hu, S.G.; Luo, Q. A new lane departure warning algorithm considering the driver’s behavior characteristics. Math. Probl. Eng. 2015, 8, 1–11. [Google Scholar] [CrossRef]
- Huang, J.Y.; Huang, Z.Y.; Chen, K.H. Combining low-cost inertial measurement unit (IMU) and deep learning algorithm for predicting vehicle attitude. In Proceedings of the 2017 IEEE Conference on Dependable and Secure Computing, Taipei, Taiwan, 7–10 August 2017; pp. 237–239. [Google Scholar]
- Kubo, N.; Suzuki, T. Performance improvement of RTK-GNSS with IMU and vehicle speed sensors in an urban environment. IEICE Trans. Fundam. Electron. Commun. Comput. Sci. 2016, E99-A, 217–224. [Google Scholar] [CrossRef]
- Li, W.; Li, W.Y.; Cui, X.; Zhao, S.; Lu, M. A tightly coupled RTK/INS algorithm with ambiguity resolution in the position domain for ground vehicles in harsh urban environments. Sensors 2018, 18, 2160. [Google Scholar] [CrossRef] [PubMed]
- El-Mowafy, A.; Kubo, N. Integrity Monitoring of vehicle positioning in urban environment using RTK-GNSS, IMU and speedometer. Meas. Sci. Technol. 2017, 28, 055102. [Google Scholar] [CrossRef]
- Drawil, N.M.; Amar, H.M.; Basir, O.A. GPS localization accuracy classification: A context-based approach. IEEE Trans. Intell. Transp. Syst. 2013, 14, 262–273. [Google Scholar] [CrossRef]
- Chen, J.; Xu, W.; Seng, D.; Peng, W. Stereo vision-based real-time localization of electric vehicle battery in the complex environment. Adv. Robot. 2016, 30, 1050–1060. [Google Scholar] [CrossRef]
- Valiente, D.; Payá, L.; Jiménez, L.; Sebastián, J.M.; Reinoso, Ó. Visual information fusion through bayesian inference for adaptive probability-oriented feature matching. Sensors 2018, 18, 2041. [Google Scholar] [CrossRef] [PubMed]
- Gakne, P.V.; O’Keefe, K. Tightly-coupled GNSS/vision using a sky-pointing camera for vehicle navigation in urban areas. Sensors 2018, 18, 1244. [Google Scholar] [CrossRef] [PubMed]
- Du, X.; Tan, K.K. Vision-based approach towards lane line detection and vehicle localization. Mach. Vis. Appl. 2016, 27, 175–191. [Google Scholar] [CrossRef]
- Holz, D.; Behnke, S. Sancta simplicitas—On the efficiency and achievable results of SLAM using ICP-based incremental registration. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 1380–1387. [Google Scholar]
- Ruchti, P.; Steder, B.; Ruhnke, M.; Burgard, W. Localization on openstreetmap data using a 3D laser scanner. In Proceedings of the IEEE International Conference on Robotics and Automation, Seattle, WA, USA, 26–30 May 2015; pp. 5260–5265. [Google Scholar]
- Valiente, D.; Gil, A.; Payá, L.; Sebastián, J.M.; Reinoso, Ó. Robust visual localization with dynamic uncertainty management in omnidirectional SLAM. Appl. Sci. 2017, 7, 1294. [Google Scholar] [CrossRef]
- Mur-Artal, R.; Montiel, J.M.M.; Tardos, J.D. ORB-SLAM: A versatile and accurate monocular SLAM system. IEEE Trans. Robot. 2015, 31, 1147–1163. [Google Scholar] [CrossRef]
- Li, Y.; Hu, Z.Z.; Hu, Y.Z.; Chu, D. Integration of vision and topological self-localization for intelligent vehicles. Mechatronics 2018, 51, 46–58. [Google Scholar] [CrossRef]
- Zang, A.; Li, Z.; Doria, D.; Trajcevski, G. Accurate vehicle self-localization in high definition map dataset. In Proceedings of the 1st ACM SIGSPATIAL Workshop on High-Precision Maps and Intelligent Applications for Autonomous Vehicles, Redondo Beach, CA, USA, 7–10 November 2017; pp. 1–8. [Google Scholar]
- Seif, H.G.; Hu, X. Autonomous Driving in the iCity—HD maps as a key challenge of the automotive. Ind. Eng. 2016, 2, 159–162. [Google Scholar] [CrossRef]
- Tomtom. Tomtom HD Map for Autonomous Driving Extends to Japan. 2017. Available online: https://corporate.tomtom.com/news-releases/news-release-details/tomtom-hd-map-autonomous-driving-extends-japan?releaseid=1045730 (accessed on 27 October 2017).
- Bender, P.; Ziegler, J.; Stiller, C. Lanelets: Efficient Map representation for autonomous driving. In Proceedings of the 2014 IEEE Intelligent Vehicles Symposium Proceedings, Dearborn, MI, USA, 8–11 June 2014; pp. 420–425. [Google Scholar]
- Schreiber, M.; Knöppel, C.; Franke, U. Laneloc: Lane marking based localization using highly accurate maps. In Proceedings of the 2013 IEEE Intelligent Vehicles Symposium, Gold Coast, QLD, Australia, 23–26 June 2013; pp. 449–454. [Google Scholar]
- Tao, Z.; Bonnifait, P.; Frémont, V.; Ibañez-Guzman, J. Mapping and localization using gps, lane markings and proprioceptive sensors. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 406–412. [Google Scholar]
- Vivacqua, R.P.D.; Bertozzi, M.; Cerri, P.; Martins, F.N.; Vassallo, R.F. Self-localization based on visual lane marking maps: An accurate low-cost approach for autonomous driving. IEEE Trans. Intell. Transp. Syst. 2018, 99, 582–597. [Google Scholar] [CrossRef]
- Bauer, S.; Alkhorshid, Y.; Wanielik, G. Using high-definition maps for precise urban vehicle localization. In Proceedings of the 2016 IEEE 19th International Conference on Intelligent Transportation Systems (ITSC), Rio de Janeiro, Brazil, 1–4 November 2016; pp. 492–497. [Google Scholar]
- Lee, H.; Kim, S.; Park, S.; Jeong, Y.; Lee, H.; Yi, K. AVM/Lidar sensor based lane marking detection method for automated driving on complex urban roads. In Proceedings of the 2017 IEEE Intelligent Vehicles Symposium (IV), Los Angeles, CA, USA, 11–14 June 2017; pp. 1434–1439. [Google Scholar]
- Im, J.-H.; Im, S.-H.; Jee, G.-I. Vertical corner feature based precise vehicle localization using 3D lidar in urban area. Sensors 2016, 16, 1268. [Google Scholar]
- Li, Y.C.; Hu, Z.Z.; Li, Z.; Sotelo, M.A.; Ma, Y. Multiscale site matching for vision-only self-localization of intelligent vehicles. IEEE Intell. Transp. Syst. Mag. 2018, 10, 170–183. [Google Scholar] [CrossRef]
- Tao, Q.W.; Hu, Z.Z.; Huang, G. Coding Pavement lanes for accurate self-localization of intelligent vehicles. In Proceedings of the 2018 IEEE Intelligent Vehicles Symposium, Changshu, China, 26–30 June 2018. [Google Scholar]
- Grafarend, E. The optimal universal transverse mercator projection. In Geodetic Theory Today; Springer: Berlin/Heidelberg, Germany, 1995; p. 51. [Google Scholar]
- Li, J.; Mei, X.; Prokhorov, D. Deep neural network for structural prediction and lane detection in traffic scene. IEEE Trans. Neural Netw. Learn. Syst. 2017, 28, 690–703. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Z. A flexible new technique for camera calibration. IEEE Trans. Pattern Anal. Mach. Intell. 2000, 22, 1330–1334. [Google Scholar] [CrossRef]
- Chen, Z.; Wu, C.; Zhang, Y.; Huang, Z.; Jiang, J.; Lyu, N.; Ran, B. Vehicle behavior learning via sparse reconstruction with l2-lp minimization and trajectory similarity. IEEE Trans. Intell. Transp. Syst. 2017, 18, 236–247. [Google Scholar] [CrossRef]
- Kalman, R.E. A new approach to linear filtering and prediction problems. J. Basic Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data Type | Mean (m) | SD (m) |
|---|---|---|
| Ground truth data | 0 | 0 |
| Raw GPS coordinates | 3–5 | 3 |
| Lateral distance from lane line | 0.1 | 0.05 |
| Trial Number | Dr (mm) | Dl (mm) |
|---|---|---|
| 1-1 | 1800 | 1800 |
| 1-2 | 1877.2 | 1784.5 |
| 1-3 | 1829.4 | 1797.7 |
| 1-4 | 2199.2 | 1486.2 |
| 1-5 | 2531.8 | 1140.2 |
| 1-6 | 2788.4 | 893.32 |
| 1-7 | 2789.5 | 891.1 |
| 1-8 | 3285.1 | 485.28 |
| 1-9 | 2763.9 | 868.87 |
| 1-10 | 2153.5 | 1494.7 |
| 1-11 | 1802.9 | 1876.8 |
| 1-12 | 1780.8 | 1881.7 |
| Positioning Error of GPS (m) | Positioning Error Mean (m) | Positioning Error SD (m) | Longitudinal Error Mean (m) | Longitudinal Error SD (m) |
|---|---|---|---|---|
| 4.33 | 2.79 | 2.55 | 1.83 | 1.79 |
| 3.75 | 1.27 | 1.18 | 0.91 | 0.67 |
| 4.04 | 1.88 | 1.94 | 1.43 | 1.18 |
| 3.12 | 1.51 | 1.39 | 0.98 | 1.03 |
| Methods | Mean Localization Errors (m) | Error Reduction after Integration (%) |
|---|---|---|
| Method in [16] | 11.12 | 33.3% |
| Method in [16] + Proposed method | 7.42 | |
| Method in [28] | 0.54 | 31.5% |
| Method in [28] + Proposed method | 0.37 | |
| Method in [15] | 2.91 | 23.4% |
| Method in [15] + Proposed method | 2.23 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cai, H.; Hu, Z.; Huang, G.; Zhu, D.; Su, X. Integration of GPS, Monocular Vision, and High Definition (HD) Map for Accurate Vehicle Localization. Sensors 2018, 18, 3270. https://doi.org/10.3390/s18103270
Cai H, Hu Z, Huang G, Zhu D, Su X. Integration of GPS, Monocular Vision, and High Definition (HD) Map for Accurate Vehicle Localization. Sensors. 2018; 18(10):3270. https://doi.org/10.3390/s18103270
Chicago/Turabian StyleCai, Hao, Zhaozheng Hu, Gang Huang, Dunyao Zhu, and Xiaocong Su. 2018. "Integration of GPS, Monocular Vision, and High Definition (HD) Map for Accurate Vehicle Localization" Sensors 18, no. 10: 3270. https://doi.org/10.3390/s18103270
APA StyleCai, H., Hu, Z., Huang, G., Zhu, D., & Su, X. (2018). Integration of GPS, Monocular Vision, and High Definition (HD) Map for Accurate Vehicle Localization. Sensors, 18(10), 3270. https://doi.org/10.3390/s18103270