Distance-Resolving Raman Radar Based on a Time-Correlated CMOS Single-Photon Avalanche Diode Line Sensor

Abstract

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Raman Radar Set-Up and Test Principles
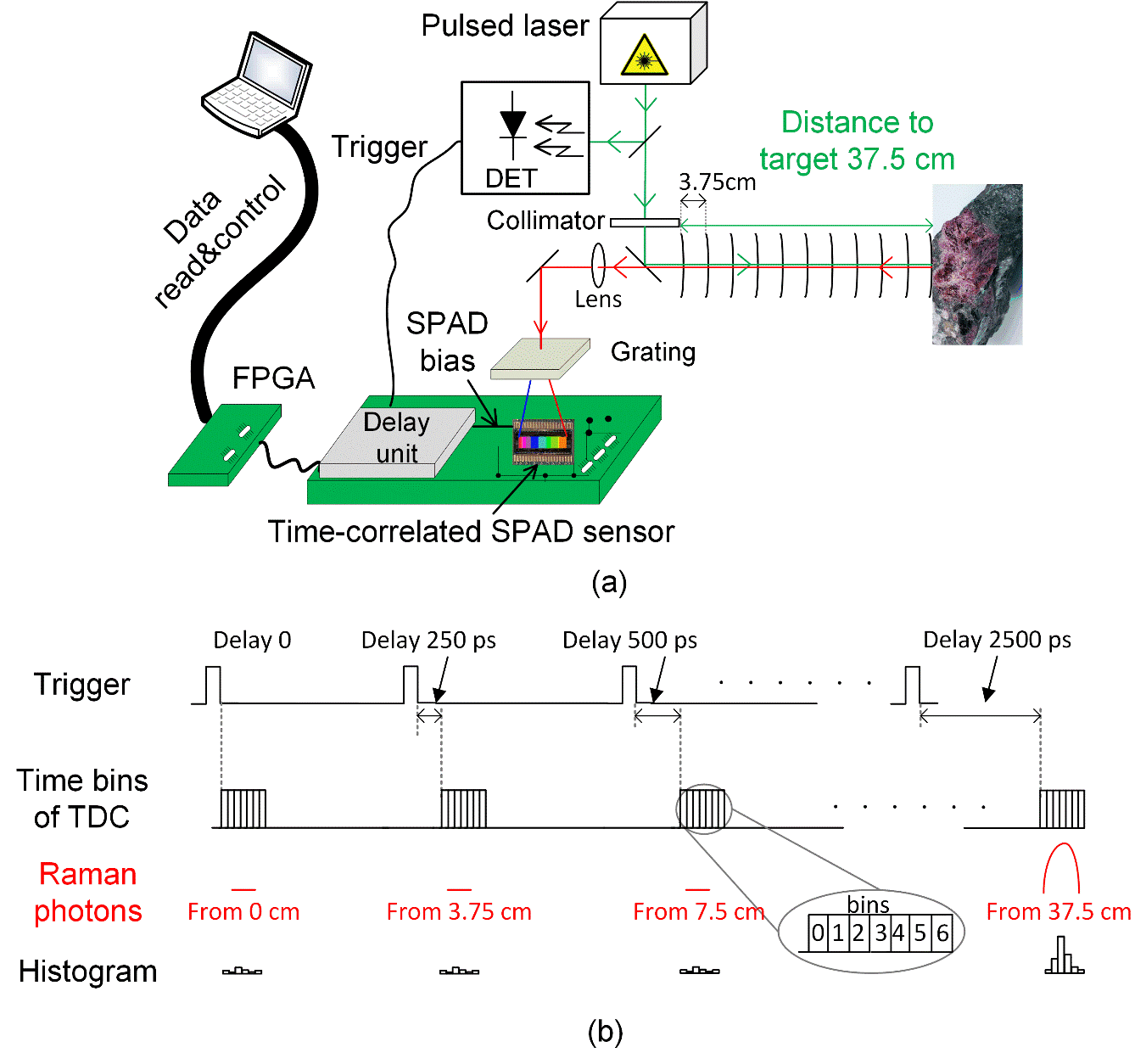
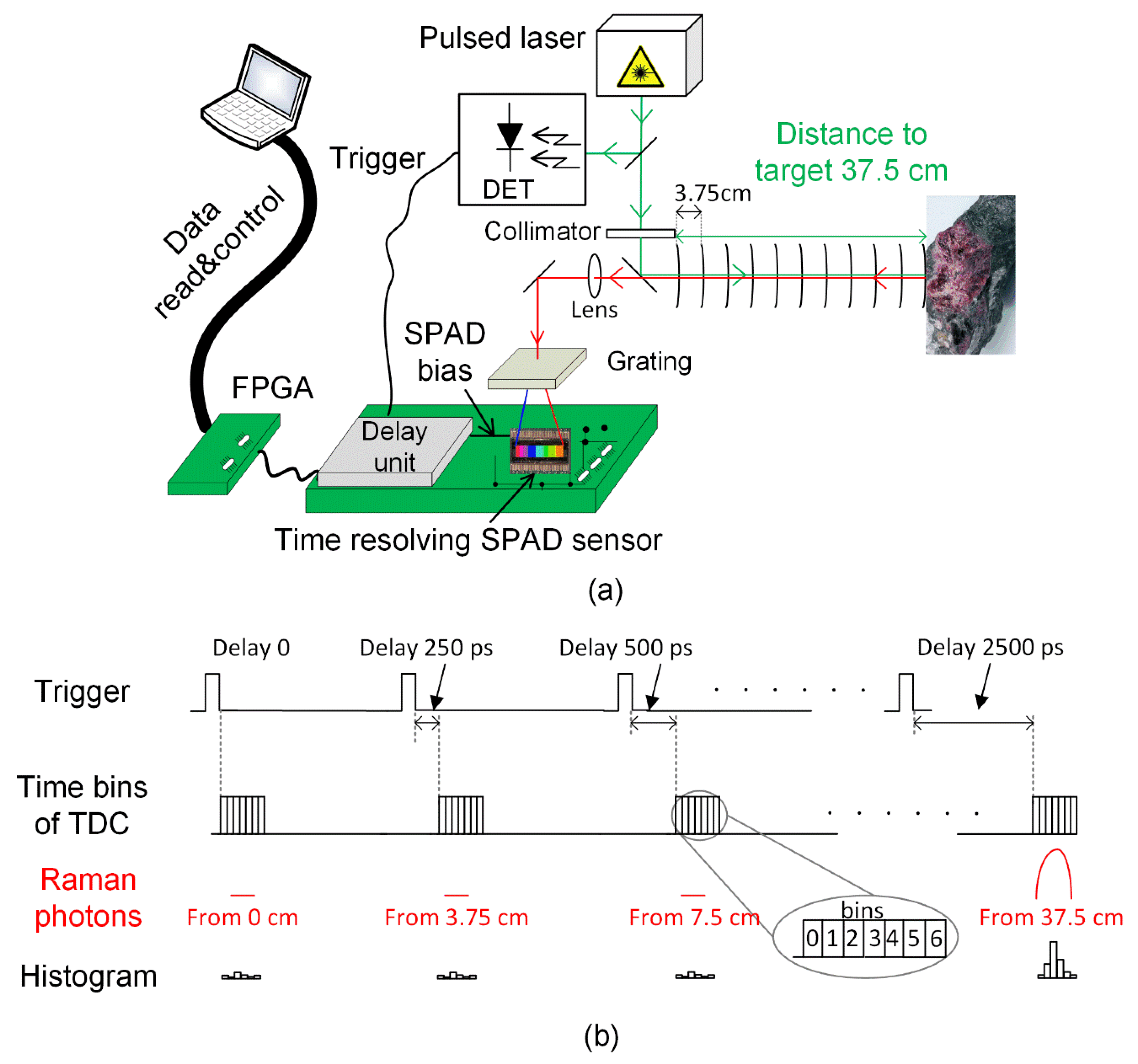
2.1. The Time-Correlated CMOS SPAD Line Sensor-Based Distance-Resolving Raman Radar Device
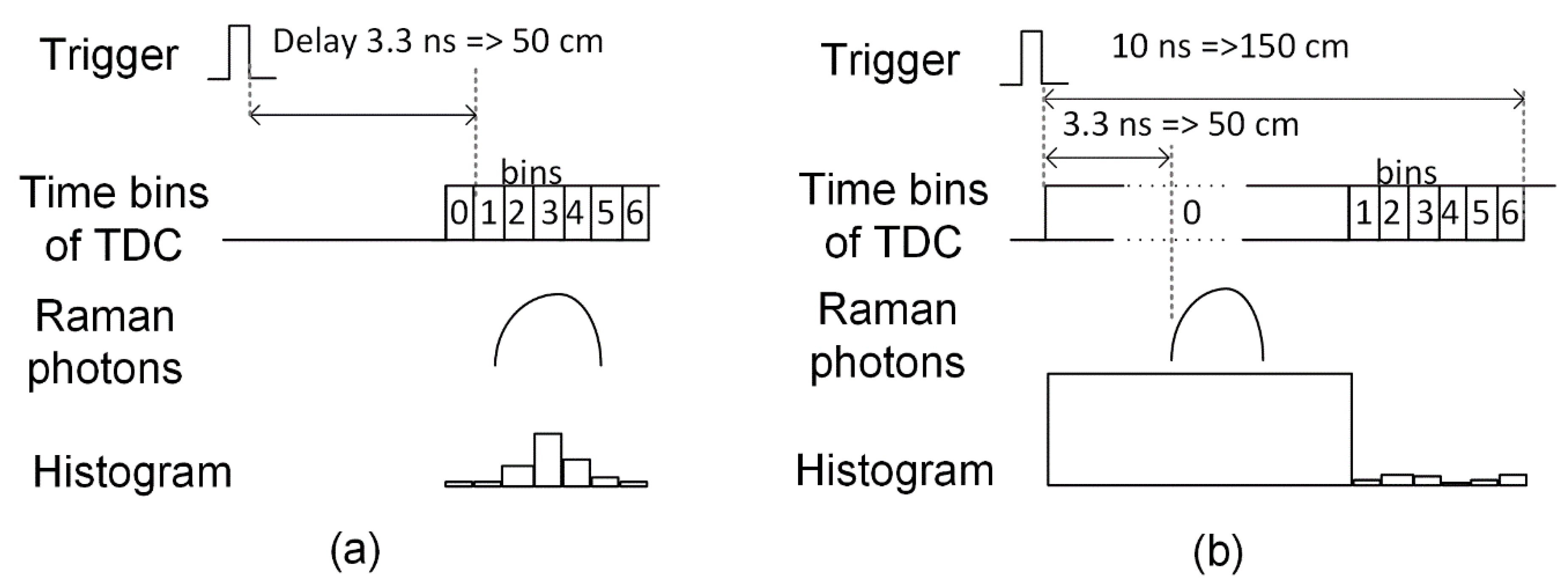
2.2. Test Principle for Evaluating the Distance Derivation Capability
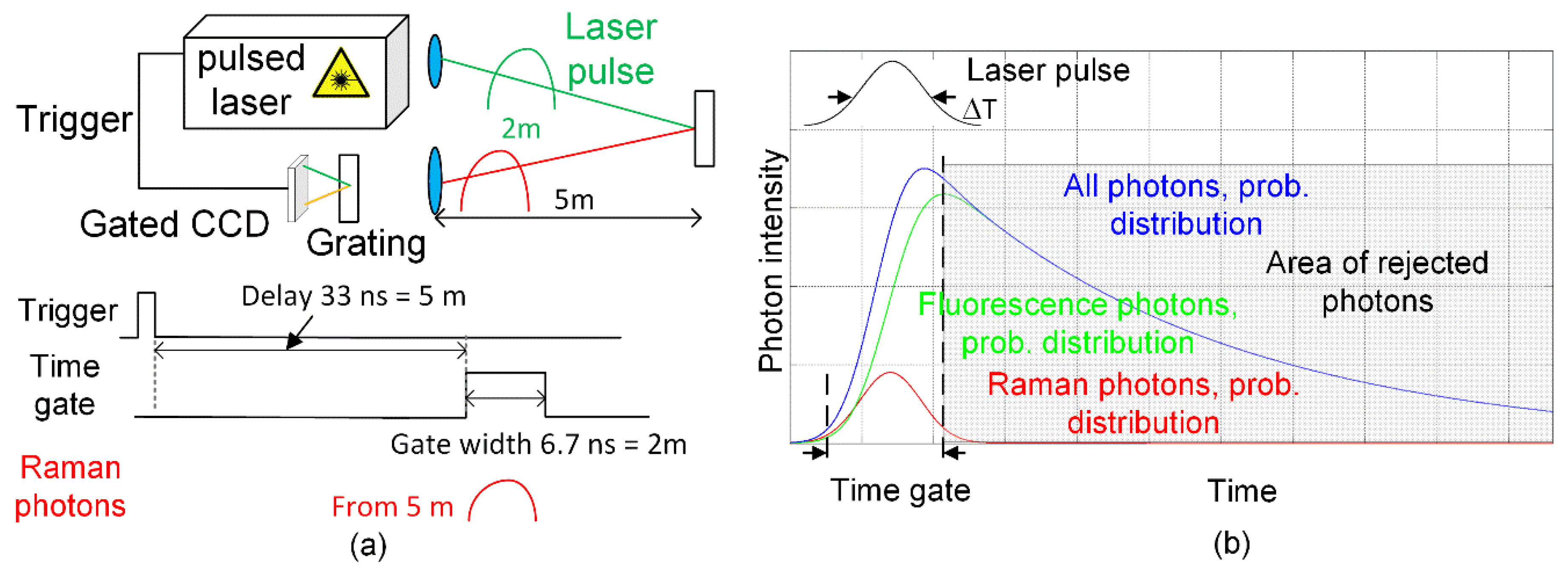
2.3. Test Principle for Evaluating the Effectiveness of Background Supression
2.4. Test Principle for Evaluating the Effectiveness of Fluorescence Suppression
3. Measurement Results
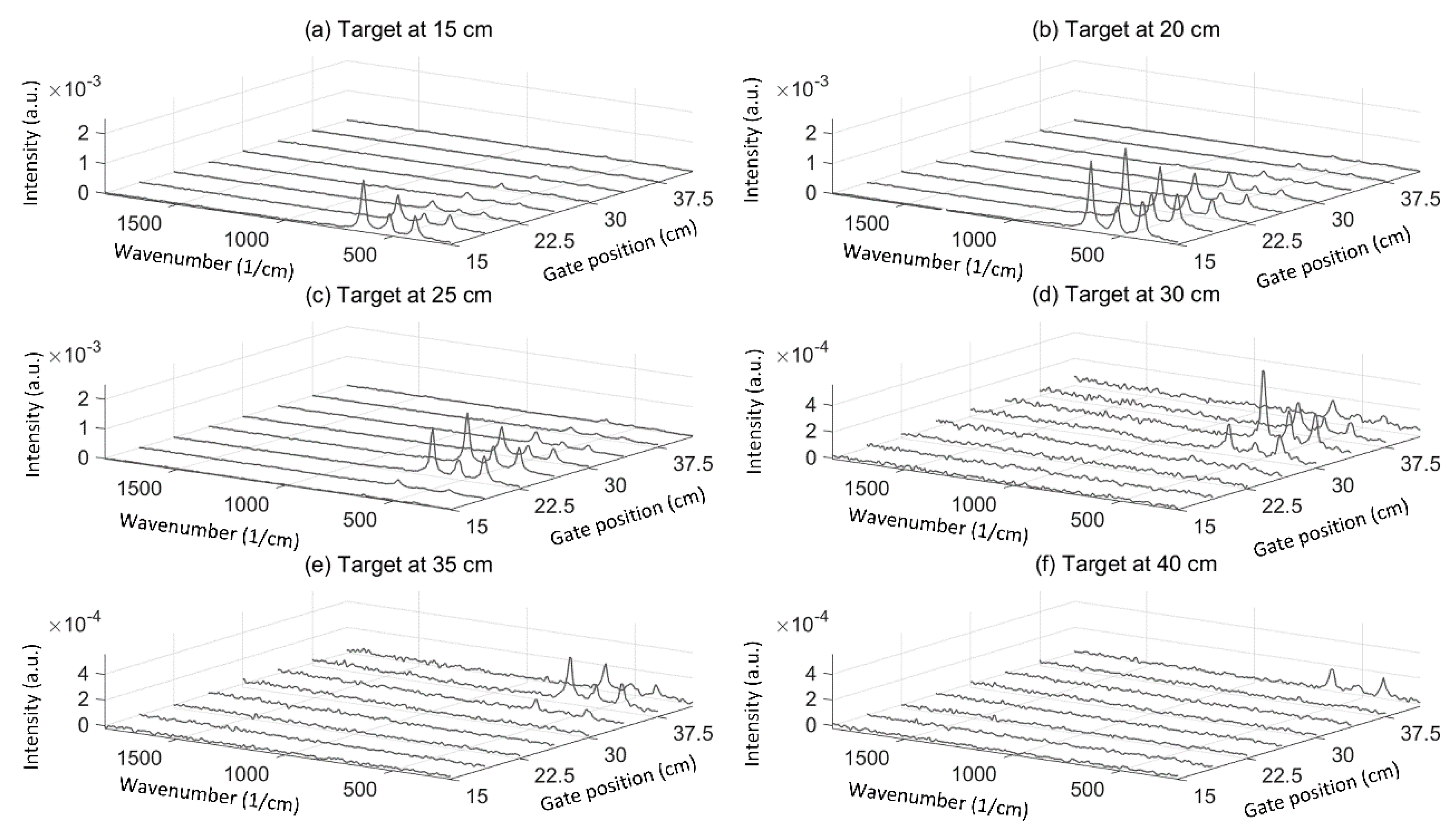
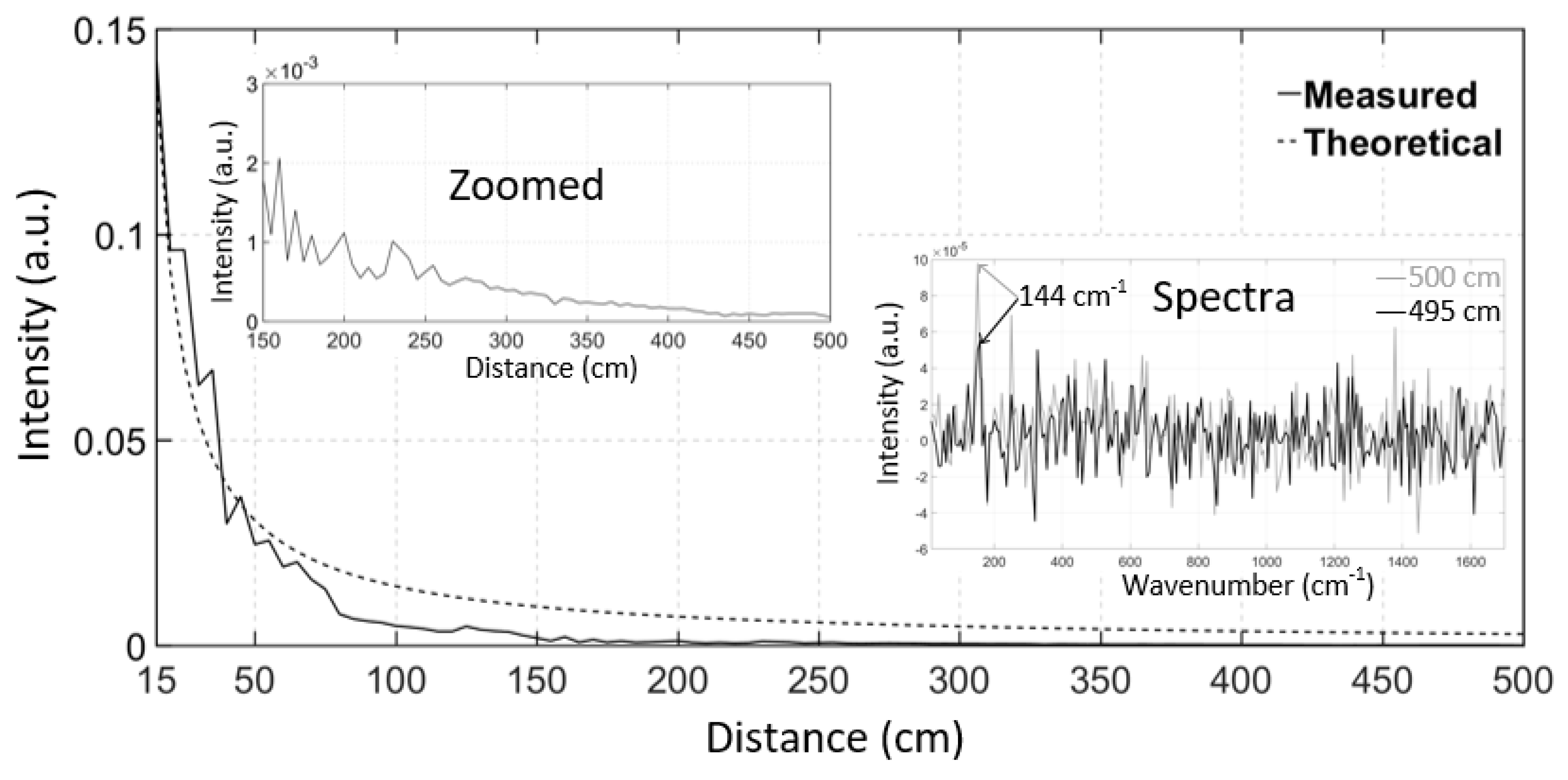
3.1. Results of the Distance Derivation Measurements
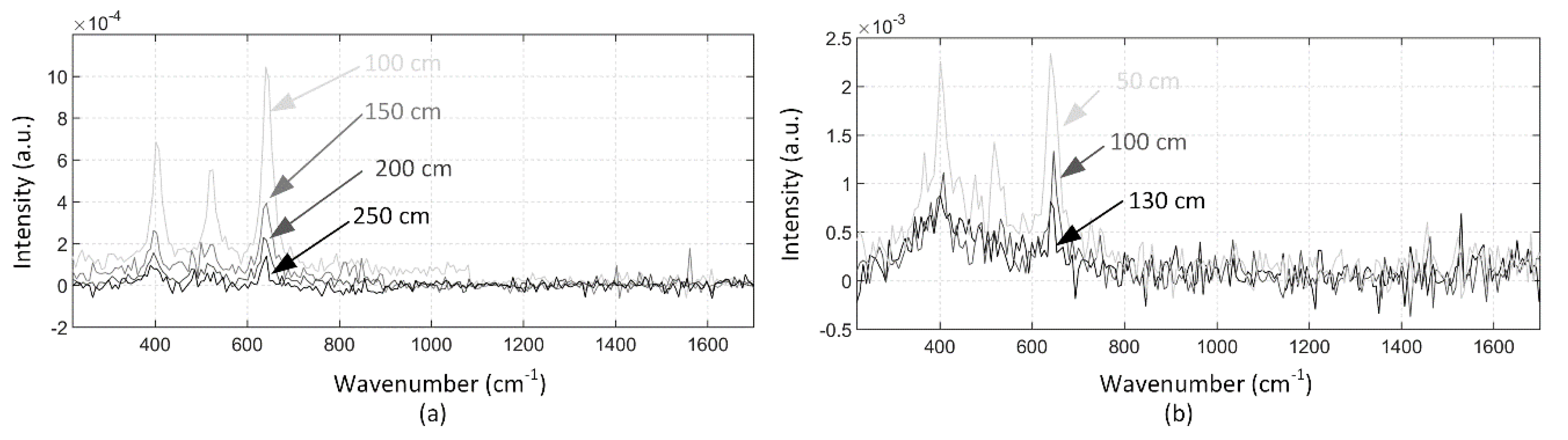
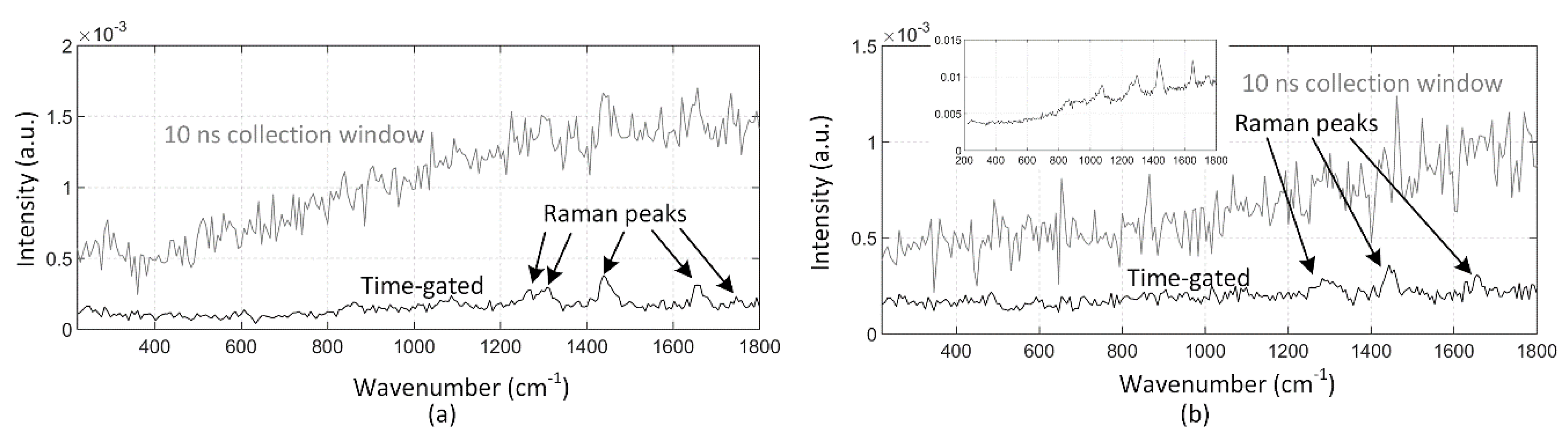
3.2. Results of the Background Suppression Measurements
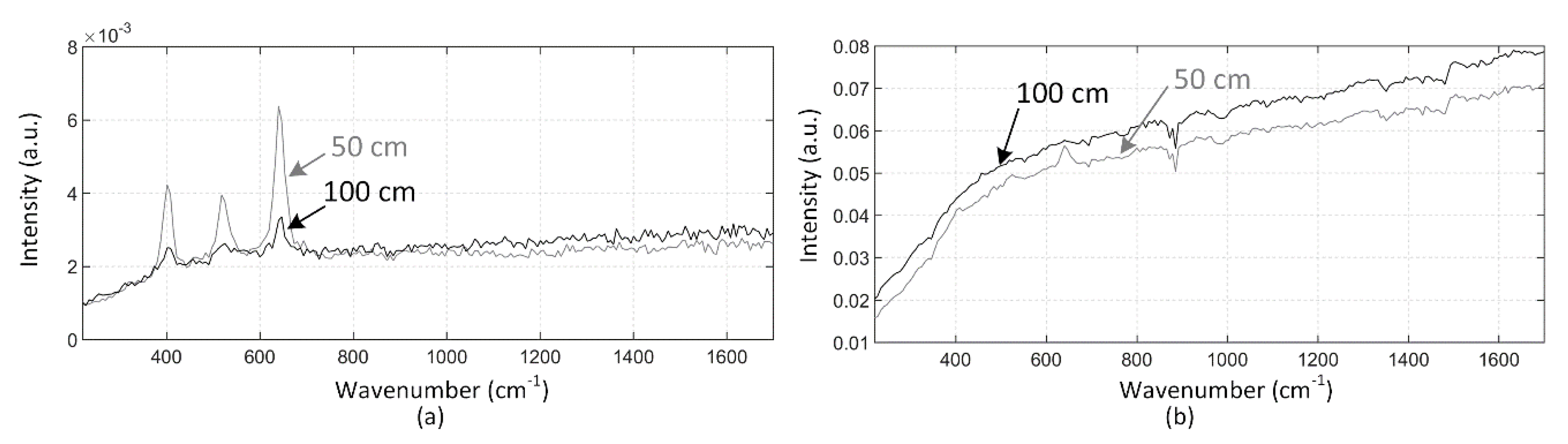
3.3. Results of the Fluorescence Suppression Measurements
4. Discussion and Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Cooney, J.A. Measurements of the Raman component of laser atmospheric backscatter. Appl. Phys. Lett. 1968, 12, 40–42. [Google Scholar] [CrossRef]
- Kobayashi, T.; Inaba, H. Laser-Raman Radar for Air Pollution Probe. Proc. IEEE 1970, 58, 1568–1570. [Google Scholar] [CrossRef]
- Sharma, S.K.; Lucey, P.G.; Ghosh, M.; Hubble, H.W.; Horton, K.A. Stand-off Raman spectroscopic detection of minerals on planetary surfaces. Spectrochim. Acta Part A 2003, 59, 2391–2407. [Google Scholar] [CrossRef]
- Carter, J.C.; Angel, S.M.; Lawrence-Snyder, M.; Scaffidi, J.; Whipple, R.E.; Reynolds, J.G. Standoff Detection of High Explosive Materials at 50 Meters in Ambient Light Conditions Using a Small Raman Instrument. Appl. Spectrosc. 2005, 59, 769–775. [Google Scholar] [CrossRef] [PubMed]
- Misra, A.K.; Sharma, S.K.; Chio, C.H.; Lucey, P.G.; Lienert, B. Pulsed remote Raman system for daytime measurements of mineral spectra. Spectrochim. Acta Part A 2005, 61, 2281–2287. [Google Scholar] [CrossRef] [PubMed]
- Gaft, M.; Nagli, L. UV gated Raman spectroscopy for standoff detection of explosives. Opt. Mater. 2008, 30, 1739–1746. [Google Scholar] [CrossRef]
- Sharma, S.K.; Misra, A.K.; Lucey, P.G.; Lentz, R.C.F. A combined remote Raman and LIBS instrument for characterizing minerals with 532 nm laser excitation. Spectrochim. Acta Part A 2009, 73, 468–476. [Google Scholar] [CrossRef] [PubMed]
- Izake, E.L. Forensic and homeland security applications of modern portable Raman spectroscopy. Forensic Sci. Int. 2010, 202, 1–8. [Google Scholar] [CrossRef] [PubMed]
- Fleger, Y.; Nagli, L.; Gaft, M.; Rosenbluh, M. Narrow gated Raman and Luminescence of explosives. J. Lumin. 2009, 129, 979–983. [Google Scholar] [CrossRef]
- Blacksberg, J.; Maruyama, Y.; Charbon, E.; Rossman, G.R. Fast single-photon avalanche diode arrays for laser Raman spectroscopy. Opt. Lett. 2011, 36, 3672–3674. [Google Scholar] [CrossRef] [PubMed]
- Matousek, P.; Towrie, M.; Ma, C.; Kwok, W.M.; Phillips, D.; Toner, W.T.; Parker, A.W. Fluorescence suppression in resonance Raman spectroscopy using a high-performance picosecond Kerr gate. J. Raman Spectrosc. 2001, 32, 983–988. [Google Scholar] [CrossRef]
- Martyshkin, D.V.; Ahuja, R.C.; Kudriavtsev, A.; Mirov, S.B. Effective suppression of fluorescence light in Raman measurements using ultrafast time gated charge coupled device camera. Rev. Sci. Instrum. 2004, 75, 630–635. [Google Scholar] [CrossRef]
- Nissinen, I.; Nissinen, J.; Länsman, A.-K.; Hallman, L.; Kilpelä, A.; Kostamovaara, J.; Kögler, M.; Aikio, M.; Tenhunen, J. A sub-ns time-gated CMOS single photon avalanche diode detector for Raman spectroscopy. In Proceedings of the IEEE European Solid-State Device Conference, Helsinki, Finland, 12–16 September 2011. [Google Scholar]
- Kostamovaara, J.; Tenhunen, J.; Krögler, M.; Nissinen, I.; Nissinen, J.; Keränen, P. Fluorescence suppression in Raman spectroscopy using a time-gated CMOS SPAD. Opt. Express 2013, 21, 31632–31645. [Google Scholar] [CrossRef] [PubMed]
- Nissinen, I.; Länsman, A.-K.; Nissinen, J.; Holma, J.; Kostamovaara, J. 2 × (4×) 128 time-gated CMOS single photon avalanche diode line detector with 100 ps resolution for Raman spectroscopy. In Proceedings of the IEEE European Solid-State Circuits Conference, Bucharest, Romania, 16–20 September 2013. [Google Scholar]
- Maruyama, Y.; Blacksberg, J.; Charbon, E. A 1024 × 8, 700-ps Time-Gated SPAD Line Sensor for Planetary Surface Exploration with Laser Raman Spectroscopy and LIBS. IEEE J. Solid-State Circuits 2014, 49, 179–189. [Google Scholar] [CrossRef]
- Li, Z.; Deen, M.J.; Kumar, S.; Selvaganapathy, P.R. Raman Spectroscopy for In-Line Water Quality Monitoring—Instrumentation and Potential. Sensors 2014, 14, 17275–17303. [Google Scholar] [CrossRef] [PubMed]
- Erdogan, A.T.; Walker, R.; Finlayson, N.; Krstajic, N.; Williams, G.O.S.; Henderson, R.K. A 16.5 Giga Events/s 1024 × 8 SPAD Line Sensor with per-pixel Zoomable 50 ps–6.4 ns/bin Histogramming TDC. In Proceedings of the Symposium on VLSI Circuits, Kyoto, Japan, 5–8 June 2017. [Google Scholar]
- Nissinen, I.; Nissinen, J.; Keränen, P.; Stoppa, D.; Kostamovaara, J. A 16 × 256 SPAD Line Detector with a 50-ps, 3-bit, 256-channel Time-to-Digital Converter for Raman Spectroscopy. IEEE Sens. J. 2018, 18, 3789–3798. [Google Scholar] [CrossRef]
- Rojalin, T.; Kurki, L.; Laaksonen, T.; Viitala, T.; Kostamovaara, J.; Gordon, K.C.; Galvis, L.; Wachsmann-Hogiu, S.; Strachan, C.J.; Yliperttula, M. Fluorescence-suppressed time-resolved Raman spectroscopy of pharmaceuticals using complementary metal-oxide semiconductor (CMOS) single-photon avalanche diode (SPAD) detector. Anal. Bioanal. Chem. 2016, 408, 761–774. [Google Scholar]
- Ohsaka, T.; Izumi, F.; Fujiki, Y. Raman spectrum of anatase, TiO2. J. Raman Spectrosc. 1978, 7, 321–324. [Google Scholar] [CrossRef]
- Nissinen, I.; Nissinen, J.; Keränen, P.; Kostamovaara, J. On the effects of the time gate position and width on the signal-to-noise ratio in a time-gated CMOS single photon avalanche diode based Raman spectroscopy. Sens. Actuators B Chem. 2017, 241, 1145–1152. [Google Scholar] [CrossRef]
- Raman Applications in Food-Processing. Available online: https://www.process-instruments-inc.com/Solutions/food/ (accessed on 19 September 2018).










© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kekkonen, J.; Nissinen, J.; Kostamovaara, J.; Nissinen, I. Distance-Resolving Raman Radar Based on a Time-Correlated CMOS Single-Photon Avalanche Diode Line Sensor. Sensors 2018, 18, 3200. https://doi.org/10.3390/s18103200
Kekkonen J, Nissinen J, Kostamovaara J, Nissinen I. Distance-Resolving Raman Radar Based on a Time-Correlated CMOS Single-Photon Avalanche Diode Line Sensor. Sensors. 2018; 18(10):3200. https://doi.org/10.3390/s18103200
Chicago/Turabian StyleKekkonen, Jere, Jan Nissinen, Juha Kostamovaara, and Ilkka Nissinen. 2018. "Distance-Resolving Raman Radar Based on a Time-Correlated CMOS Single-Photon Avalanche Diode Line Sensor" Sensors 18, no. 10: 3200. https://doi.org/10.3390/s18103200
APA StyleKekkonen, J., Nissinen, J., Kostamovaara, J., & Nissinen, I. (2018). Distance-Resolving Raman Radar Based on a Time-Correlated CMOS Single-Photon Avalanche Diode Line Sensor. Sensors, 18(10), 3200. https://doi.org/10.3390/s18103200