A Review of Oil Spill Remote Sensing



Abstract
1. Introduction
- oil spill mapping for both tactical and strategic countermeasures;
- slick detection and surveillance;
- gathering of legal evidence;
- law enforcement such as regarding ship discharge;
- direct support for oil spill countermeasures;
- slick trajectory determination.
2. Detection and Mapping of Oil on a Water Surface
2.1. Passive Means of Detection and Mapping
2.2. Use of Optical Techniques
2.3. Use of the Visible Spectrum
2.4. Use of the Infrared (IR)
2.5. Near-Infrared (NIR)
2.6. Ultraviolet (UV)
2.7. Satellites Operating in the Optical Region
2.8. Image Processing
2.9. Passive Microwave Sensors
3. Use of Active Sensors for Oil Spill Detection and Mapping
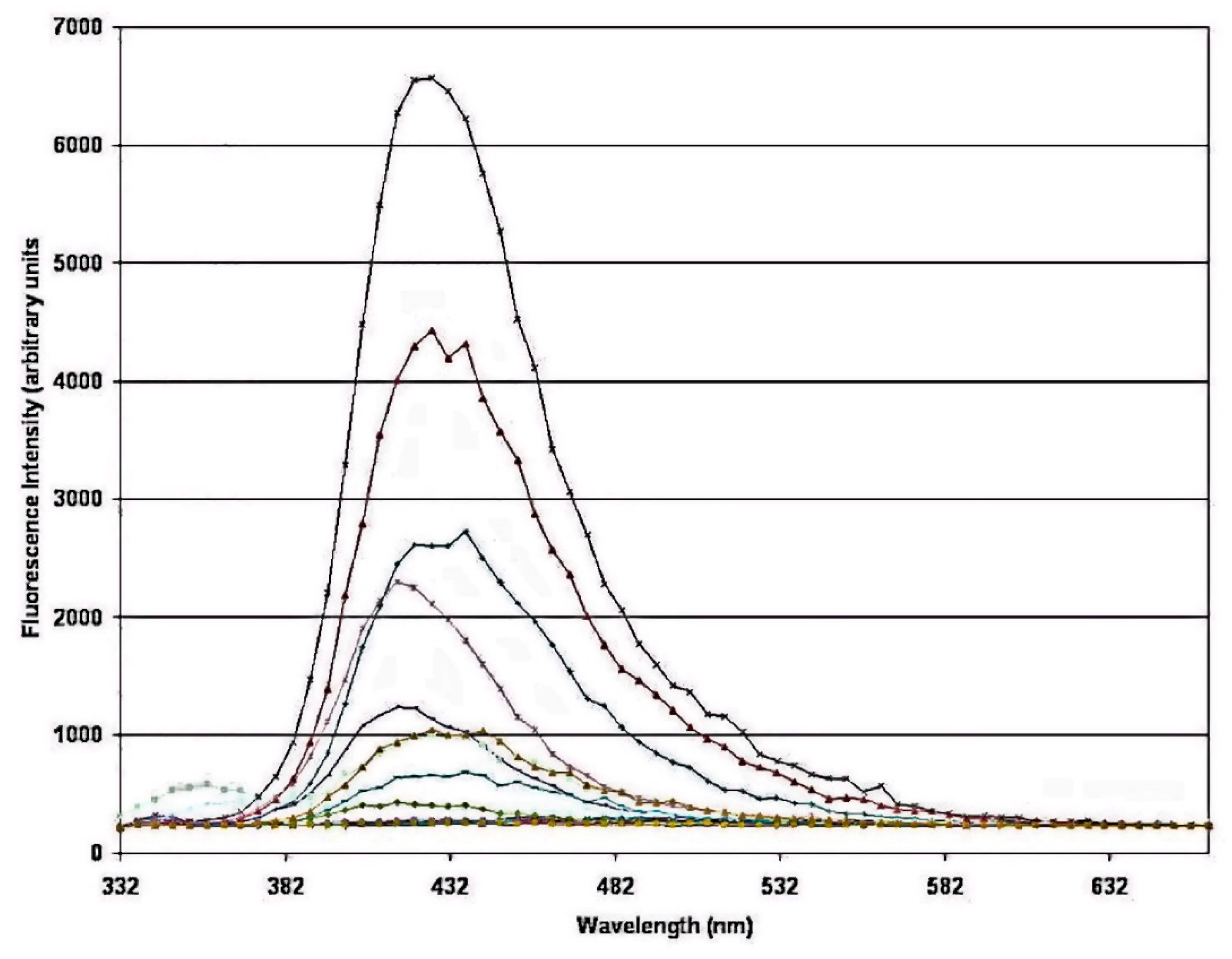
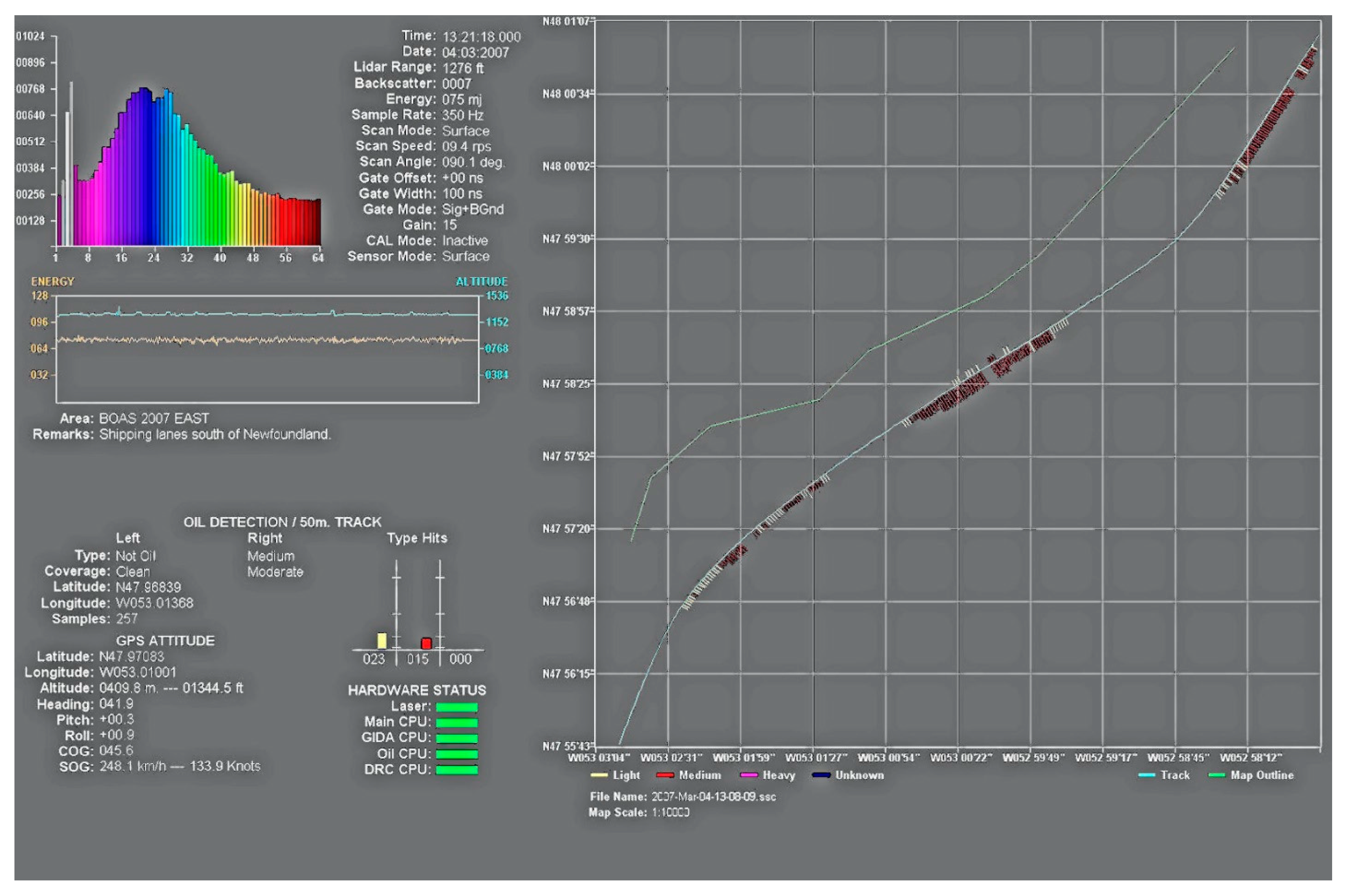
3.1. Laser Fluorosensors
3.2. Radar
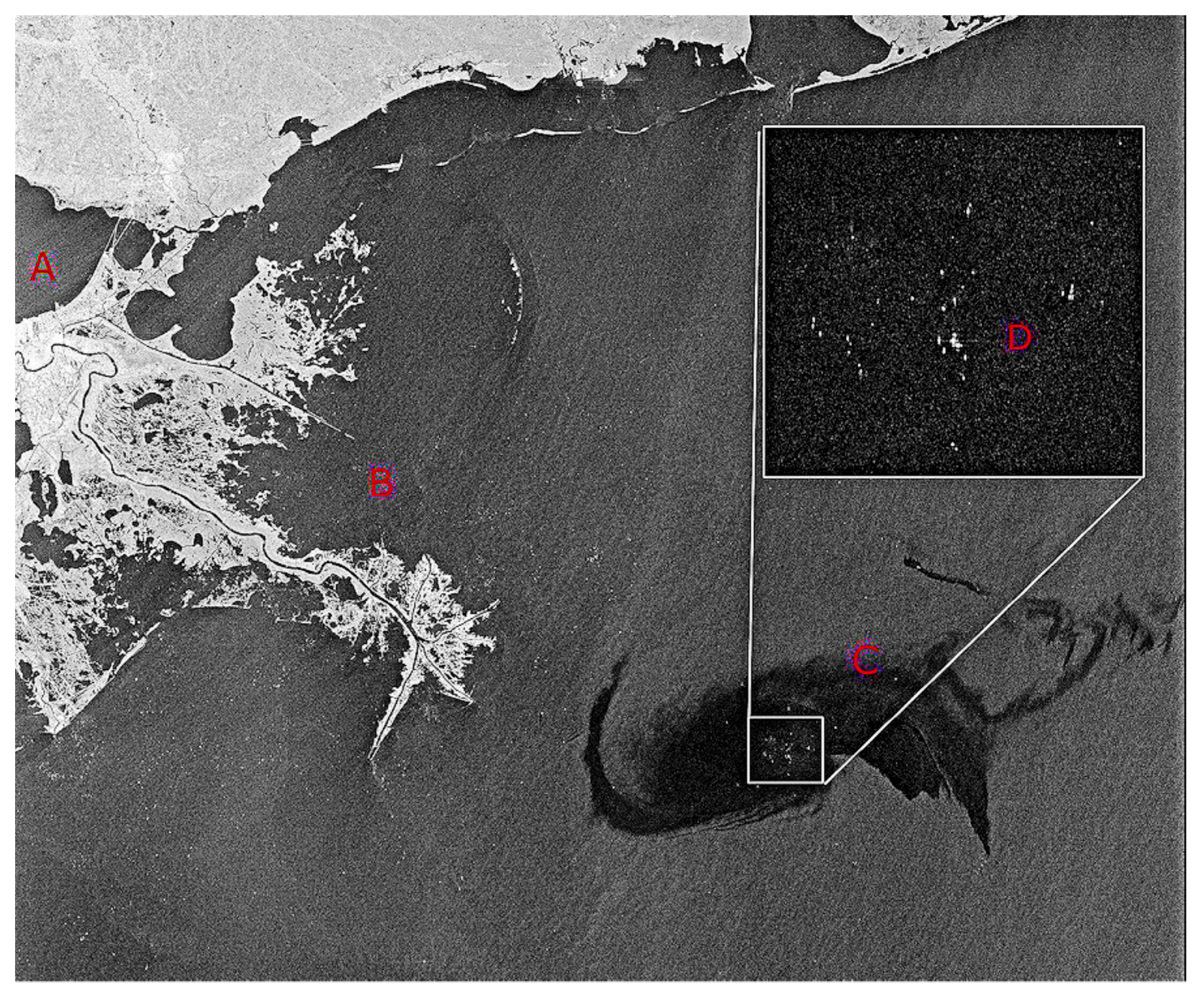
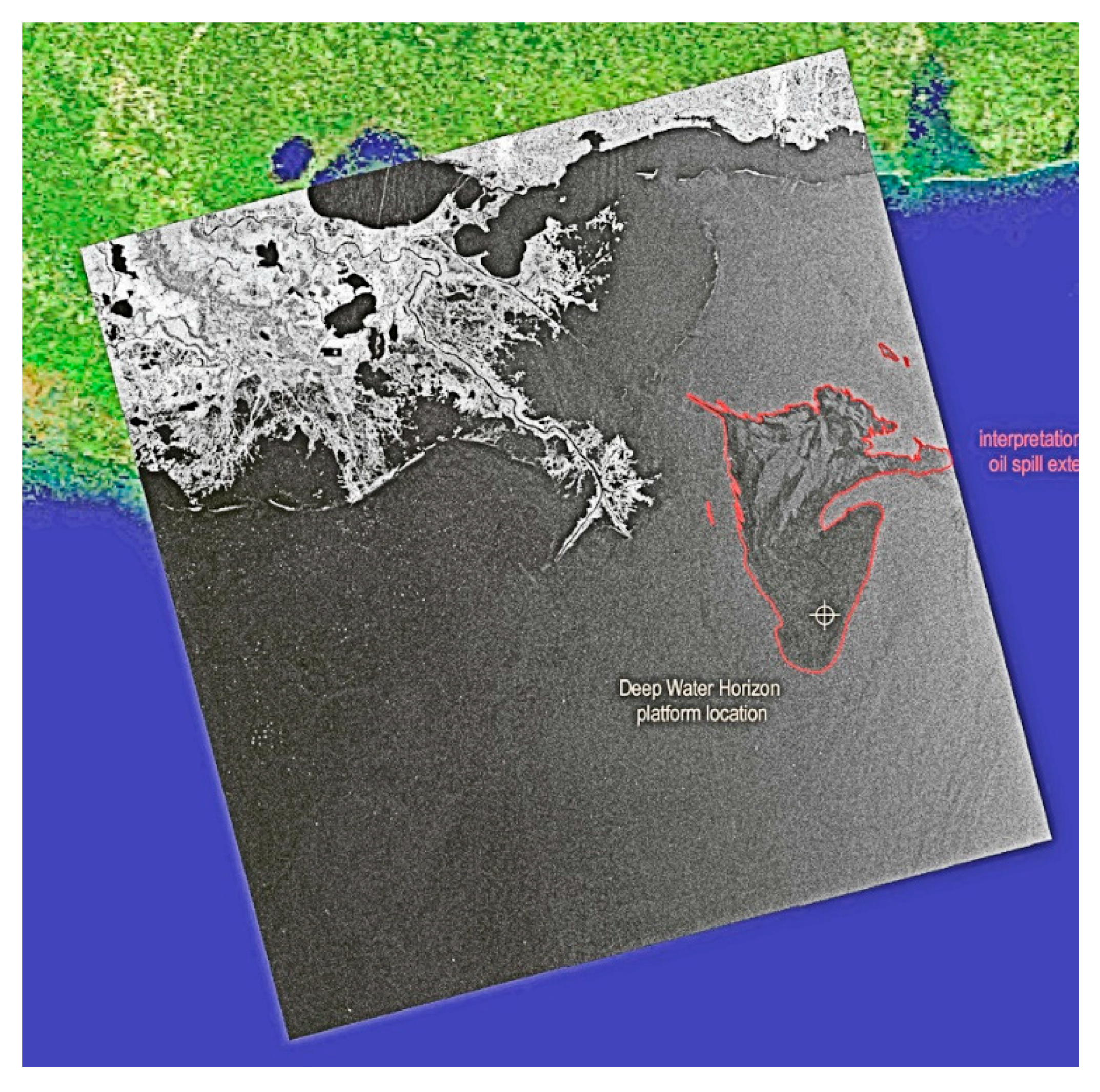
3.3. Satellite Radar Systems
3.4. Radar Image Processing
3.5. Ship-Borne Radar Oil Spill Detection
4. Slick Thickness Measurements
4.1. Passive Microwave
4.2. Visual Appearance
4.3. Infrared Brightness
4.4. Acoustic Travel Time
5. Detection of Oil on the Sea Bottom
5.1. Ultrasonics
5.2. Laser Fluorosensors
5.3. Cameras
5.4. Chemical Analysis
6. Concluding Remarks
Acknowledgments
Conflicts of Interest
References
- De Padova, D.; Mossa, M.; Adamo, M.; De Carolis, G.; Pasquariello, G. Synergistic use of an oil drift model and remote sensing observations for oil spill monitoring. Environ. Sci. Pollut. Res. 2017, 24, 5530–5543. [Google Scholar] [CrossRef] [PubMed]
- O’Hara, P.D.; Serra-Sogas, N.; Canessa, R.; Keller, P.; Pelot, R. Estimating discharge rates of oily wastes and deterrence based on aerial surveillance data collected in western Canadian marine waters. Mar. Pollut. Bull. 2013, 69, 157–164. [Google Scholar] [CrossRef] [PubMed]
- Fingas, M.; Brown, C. Review of oil spill remote sensing. Mar. Pollut. Bull. 2014, 83, 9–23. [Google Scholar] [CrossRef] [PubMed]
- Leifer, I.; Lehr, B.; Simecek-Beatty, D.; Bradley, E.; Clark, R.; Dennison, P.; Hu, Y.; Matheson, S.; Jones, C.; Holt, B.; et al. State of the art satellite and airborne oil spill remote sensing: Application to the BP DeepWater Horizon oil spill. Remote Sens. Environ. 2012, 124, 185–209. [Google Scholar] [CrossRef]
- Wang, D.; Gong, F.; Pan, D.; Hao, Z.; Zhu, Q. Introduction to the airborne marine surveillance platform and its application to water quality monitoring in China. Acta Oceanol. Sin. 2010, 29, 33–39. [Google Scholar] [CrossRef]
- Iler, A.L.; Hamilton, P.D. Detecting oil on water using polarimetric imaging. Proc. SPIE Int. Soc. Opt. Eng. 2015, 9459. [Google Scholar] [CrossRef]
- Shen, H.-Y.; Zhou, P.-C.; Feng, S.-R. Research on multi-angle near infrared spectral-polarimetric characteristic for polluted water by spilled oil. Proc. SPIE Int. Soc. Opt. Eng. 2011, 8193. [Google Scholar] [CrossRef]
- Hühnerfuss, H.; Hoffmann, F.; Simon-Kutscher, J.; Alpers, W.; Gade, M. Sea slicks and oil spills-the chemical structure and morphology determines the remote sensing signals. In Proceedings of the 2004 IEEE Internatio Geoscience and Remote Sensing Symposium, Anchorage, AK, USA, 20–24 September 2004; pp. 1366–1369. [Google Scholar]
- Myasoedov, A.; Johannessen, J.A.; Kudryavtsev, V.; Collard, F.; Chapron, B. Sun glitter as a “tool” for monitoring the ocean from space. In Proceedings of the 2nd International Conference on Remote Sensing, Environment and Transportation Engineering, Nanjing, China, 1–3 June 2012. [Google Scholar]
- Zhan, Y.; Mao, T.; Gong, F.; Wang, D.; Chen, J. An oil film information retrieval method overcoming the influence of sun glitter, based on AISA+ airborne hyper-spectral image. Proc. SPIE Int. Soc. Opt. Eng. 2010, 7825. [Google Scholar] [CrossRef]
- Brown, C.E.; Fingas, M.F.; Marois, R. Oil spill remote sensing: Laser fluorosensor demonstration flights off the East Coast of Canada. In Proceedings of the 27th Arctic and Marine Oilspill Program (AMOP) Technical Seminar, Ottawa, ON, Canada, 8–10 June 2004; Volume 27, pp. 317–334. [Google Scholar]
- Chenault, D.B.; Vaden, J.P.; Mitchell, D.A.; Demicco, E.D. Infrared polarimetric sensing of oil on water. Proc. SPIE Int. Soc. Opt. Eng. 2016, 9999. [Google Scholar] [CrossRef]
- Pinel, N.; Monnier, G.; Sergievskaya, I.; Bourlier, C. Simulation of infrared emissivity and reflectivity of oil films on sea surfaces. Proc. SPIE Int. Soc. Opt. Eng. 2015, 9638. [Google Scholar] [CrossRef]
- Shih, W.-C.; Andrews, A.B. Infrared contrast of crude-oil-covered water surfaces. Opt. Lett. 2008, 33, 3019–3021. [Google Scholar] [CrossRef] [PubMed]
- Salisbury, J.W.; Aria, D.M.; Sabins, F.F., Jr. Thermal infrared remote sensing of crude oil slicks. Remote Sens. Environ. 1993, 45, 225–231. [Google Scholar] [CrossRef]
- Grierson, I.T. Use of airborne thermal imagery to detect and monitor inshore oil spill residues during darkness hours. Environ. Manag. 1998, 22, 905–912. [Google Scholar] [CrossRef]
- Bulgarelli, B.; Djavidnia, S. On MODIS retrieval of oil spill spectral properties in the marine environment. IEEE Geosci. Remote Sens. Lett. 2012, 9, 398–402. [Google Scholar] [CrossRef]
- Pisano, A.; Bignami, F.; Santoleri, R. Oil spill detection in glint-contaminated near-infrared MODIS imagery. Remote Sens. 2015, 7, 1112–1134. [Google Scholar] [CrossRef]
- De Carolis, G.; Adamo, M.; Pasquariello, G. On the estimation of thickness of marine oil slicks from sun-glittered, near-infrared MERIS and MODIS imagery: The Lebanon oil spill case study. IEEE Trans. Geosci. Remote Sens. 2014, 52, 559–573. [Google Scholar] [CrossRef]
- Sun, S.; Hu, C.; Feng, L.; Swayze, G.A.; Holmes, J.; Graettinger, G.; MacDonald, I.; Garcia, O.; Leifer, I. Oil slick morphology derived from AVIRIS measurements of the Deepwater Horizon oil spill: Implications for spatial resolution requirements of remote sensors. Mar. Pollut. Bull. 2016, 103, 276–285. [Google Scholar] [CrossRef] [PubMed]
- De Carolis, G.; Adamo, M.; Pasquariello, G.; De Padova, D.; Mossa, M. Quantitative characterization of marine oil slick by satellite near-infrared imagery and oil drift modelling: The Fun Shai Hai case study. Int. J. Remote Sens. 2013, 34, 1838–1854. [Google Scholar] [CrossRef]
- Kokaly, R.F.; Couvillion, B.R.; Holloway, J.M.; Roberts, D.A.; Ustin, S.L.; Peterson, S.H.; Khanna, S.; Piazza, S.C. Spectroscopic remote sensing of the distribution and persistence of oil from the Deepwater Horizon spill in Barataria Bay marshes. Remote Sens. Environ. 2013, 129, 210–230. [Google Scholar] [CrossRef]
- Sicot, G.; Lennon, M.; Miegebielle, V.; Dubucq, D. Analysis of the reflectance spectra of oil emulsion spilled on the sea surface. Proc. SPIE Int. Soc. Opt. Eng. 2014, 9240. [Google Scholar] [CrossRef]
- Yin, D.; Huang, X.; Qian, W.; Huang, X.; Li, Y.; Feng, Q. Airborne validation of a new-style ultraviolet push-broom camera for ocean oil spill pollution surveillance. Proc. SPIE Int. Soc. Opt. Eng. 2010, 7825. [Google Scholar] [CrossRef]
- Lacava, T.; Ciancia, E.; Coviello, I.; Di Polito, C.; Grimaldi, C.S.L.; Pergola, N.; Satriano, V.; Temimi, M.; Zhao, J.; Tramutoli, V. A MODIS-based robust satellite technique (RST) for timely detection of oil spilled areas. Remote Sens. 2017, 9, 128. [Google Scholar] [CrossRef]
- Sun, S.; Hu, C. Sun glint requirement for the remote detection of surface oil films. Geophys. Res. Lett. 2016, 43, 309–316. [Google Scholar] [CrossRef]
- Zhao, J.; Temimi, M.; Azhar, M.A.; Ghedira, H.; Marpu, P. Multi-sensor based approach for detection of oil pollution in the Arabian Gulf and the Sea of Oman. In Proceedings of the 2015 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July 2015; pp. 2190–2193. [Google Scholar]
- Ud Din, S.; Al Dousari, A.; Literathy, P. Evidence of hydrocarbon contamination from the Burgan oil field, Kuwait-Interpretations from thermal remote sensing data. J. Environ. Manag. 2008, 86, 605–615. [Google Scholar] [CrossRef] [PubMed]
- Casciello, D.; Lacava, T.; Pergola, N.; Tramutoli, V. Robust satellite techniques for oil spill detection and monitoring using AVHRR thermal infrared bands. Int. J. Remote Sens. 2011, 32, 4107–4129. [Google Scholar] [CrossRef]
- Grimaldi, C.S.L.; Casciello, D.; Coviello, I.; Lacava, T.; Pergola, N.; Tramutoli, V. An improved RST approach for timely alert and near real time monitoring of oil spill disasters by using AVHRR data. Nat. Hazards Earth Syst. Sci. 2011, 11, 1281–1291. [Google Scholar] [CrossRef]
- Bradford, B.N.; Sanchez-Reyes, P.J. Automated oil spill detection with multispectral imagery. Proc. SPIE Int. Soc. Opt. Eng. 2011, 8030. [Google Scholar] [CrossRef]
- Vergara, L.; Soriano, A.; Safont, G.; Salazar, A. On the fusion of non-independent detectors. Digit. Signal Process. 2016, 50, 24–33. [Google Scholar] [CrossRef]
- Brown, C.E. Laser fluorosensors. In Oil Spill Science and Technology, 2nd ed.; Fingas, M., Ed.; Gulf Publishing Company: Cambridge, MA, USA, 2017; Chapter 7; pp. 402–418. [Google Scholar]
- Marzialetti, P.; Laneve, G. Oil spill monitoring on water surfaces by radar L, C and X band SAR imagery: A comparison of relevant characteristics. In Proceedings of the 2015 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; pp. 7715–7717. [Google Scholar]
- Liu, P.; Zhao, C.; Li, X.; He, M.; Pichel, W. Identification of ocean oil spills in SAR imagery based on fuzzy logic algorithm. Int. J. Remote Sens. 2010, 31, 4819–4833. [Google Scholar] [CrossRef]
- Minchew, B.; Jones, C.E.; Holt, B. Polarimetric analysis of backscatter from the Deepwater Horizon oil spill using L-band synthetic aperture radar. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3812–3830. [Google Scholar] [CrossRef]
- Nunziata, F.; Buono, A.; Migliaccio, M. A new look at the old sea oil slick observation problem: Opportunities and pitfalls of SAR polarimetry. In Proceedings of the 2015 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; pp. 4027–4030. [Google Scholar]
- Collins, M.J.; Denbina, M.; Minchew, B.; Jones, C.E.; Holt, B. On the Use of Simulated Airborne Compact Polarimetric SAR for Characterizing Oil-Water Mixing of the Deepwater Horizon Oil Spill. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 1062–1077. [Google Scholar] [CrossRef]
- Guo, H.; Wu, D.; An, J. Discrimination of Oil Slicks and Lookalikes in Polarimetric SAR Images using CNN. Sensors 2017, 17, 1837. [Google Scholar] [CrossRef]
- Chen, G.; Li, Y.; Sun, G.; Zhang, Y. Application of Deep Networks to Oil Spill Detection Using Polarimetric SAR Images. Appl. Sci. 2017, 7, 968. [Google Scholar] [CrossRef]
- Del Frate, F.; Latini, D.; Taravat, A.; Jones, C.E. A novel multi-band SAR data technique for fully automatic oil spill detection in the ocean. Proc. SPIE Int. Soc. Opt. Eng. 2013, 8891. [Google Scholar] [CrossRef]
- Marghany, M. Automatic Mexico Gulf Oil Spill Detection from Radarsat-2 SAR Satellite Data Using Genetic Algorithm. Acta Geophys. 2016, 64, 1916–1941. [Google Scholar] [CrossRef]
- Ciampalini, A.; Raspini, F.; Bianchini, S.; Tarchi, D.; Vespe, M.; Moretti, S.; Casagli, N. The Costa Concordia last cruise: The first application of high frequency monitoring based on COSMO-SkyMed constellation for wreck removal. ISPRS J. Photogramm. Remote Sens. 2016, 112, 37–49. [Google Scholar] [CrossRef]
- Genovez, P.; Ebecken, N.; Freitas, C.; Bentz, C.; Freitas, R. Intelligent hybrid system for dark spot detection using SAR data. Expert Syst. Appl. 2017, 81, 384–397. [Google Scholar] [CrossRef]
- Sefah-Twerefour, A.A.; Wiafe, G.; Adu Agyekum, K. Development of an algorithm for automatic detection of oil slicks from synthetic aperture radar (SAR) imagery in the Gulf of Guinea. In Proceedings of the 2015 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Munich, Germany, 22–27 July 2012; pp. 2105–2108. [Google Scholar]
- Ravi, A.; Giriprasad, M.N.; Naganjaneyulu, P.V. SAR images denoising using a novel stochastic diffusion wavelet scheme. Clust. Comput. 2017, 1–9. [Google Scholar] [CrossRef]
- Tripathi, A.; Bhateja, V.; Sharma, A.; Kuan, A. Modified anisotropic diffusion approach for speckle filtering. Adv. Intell. Syst. Comput. 2017, 458, 537–545. [Google Scholar] [CrossRef]
- Mera, D.; Cotos, J.M.; Varela-Pet, J.; Garcia-Pineda, O. Adaptive thresholding algorithm based on SAR images and wind data to segment oil spills along the northwest coast of the Iberian Peninsula. Mar. Pollut. Bull. 2012, 64, 2090–2096. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Li, H.; Wang, X.; Dan, W. Edge extraction of marine oil spill in SAR images. In Proceedings of the 2010 International Conference on Challenges in Environmental Science and Computer Engineering (CESCE), Wuhan, China, 6–7 March 2010; pp. 439–442. [Google Scholar]
- Zhou, X.; Ai, G.; Zheng, X. Oil spill detection based on the texture characteristics of SAR Images. In Proceedings of the 30th Asian Conference on Remote Sensing, Beijing, China, 18–23 October 2009; pp. 1161–1165. [Google Scholar]
- Schvartzman, I.; Havivi, S.; Maman, S.; Rotman, S.R.; Blumberg, D.G. Large oil spill classification using SAR images based on spatial histogram. ISPRS Arch. 2016, 41, 1183–1186. [Google Scholar]
- Mera, D.; Bolon-Canedo, V.; Cotos, J.M.; Alonso-Betanzos, A. On the use of feature selection to improve the detection of sea oil spills in SAR images. Comput. Geosci. 2017, 100, 166–178. [Google Scholar] [CrossRef]
- Vijayakumar, S.; Swarnalatha, P.; Rukmini, S. A neural network classification approach for oil spill detection on SAR images. IIOAB J. 2016, 7, 225–235. [Google Scholar]
- Lawal, A.D.; Radice, G.; Ceriotti, M. Investigating SAR algorithm for spaceborne interferometric oil spill detection. In Proceedings of the International Astronautical Congress, Toronto, ON, Canada, 29 September–3 October 2014; pp. 2571–2578. [Google Scholar]
- Taravat, A.; Del Frate, F. Weibull Multiplicative Model and machine learning models for full-automatic dark-spot detection from SAR images. ISPRS Arch. 2013, 40, 421–424. [Google Scholar] [CrossRef]
- Suo, Y.-F.; Chi, T.-H.; Ling, P. Review on the key technology of real-time oil spill monitoring system based on marine radar. In Proceedings of the 2nd International Conference on Remote Sensing, Environment and Transportation Engineering (RSETE), Nanjing, China, 1–3 June 2012. [Google Scholar]
- Fingas, M.F. How to measure slick thickness (or not). In Proceedings of the 35th AMOP Technical Seminar on Environmental Contamination and Response, Vancouver, BC, Canada, 5–7 June 2012; pp. 617–652. [Google Scholar]
- Hollinger, J.P.; Mennella, R.A. Oil spills: Measurements of their distributions and volumes by multifrequency microwave radiometry. Science 1973, 181, 54–56. [Google Scholar] [CrossRef] [PubMed]
- Skou, N. Microwave Radiometry for Oil Pollution Monitoring, Measurements, and Systems. IEEE Trans. Geosci. Remote Sens. 1986, 360–367. [Google Scholar] [CrossRef]
- Optimare. Available online: http://www.optimare.de/cms/en/divisions/fek/fek-products/mwr-p.html (accessed on 1 January 2017).
- Lehr, W.J. Visual observations and the Bonn agreement. In Proceedings of the 33th AMOP Technical Seminar on Environmental Contamination and Response, Halifax, NS, Canada, 7–9 June 2010; pp. 669–678. [Google Scholar]
- Brown, C.E.; Fingas, M.F.; Monchalin, J.-P.; Neron, C.; Padioleau, C. Airborne measurement of oil slick thickness. In Proceedings of the 29th Arctic and Marine Oilspill Program (AMOP) Technical Seminar, Vancouver, BC, Canada, 6–8 June 2006; pp. 911–919. [Google Scholar]
- Michel, J. Submerged oil. In Oil Spill Science and Technology, 2nd ed.; Fingas, M., Ed.; Gulf Publishing Company: New York, NY, USA, 2017; Chapter 13; pp. 731–758. [Google Scholar]
- Schweitzer, G.; McClinton, T.; Michel, J.; Thom, B.; Davis, A.; Mauseth, G.; Scott, T.; Sawyer, M.; Elliott, J. Response to the T/B apex 3508: A successful case history for detection and recovery of sunken oil. In Proceedings of the 39th Arctic and Marine Oil Spill Program (AMOP) Technical Seminar on Contamination and Response, Halifax, NS. Canada, 6 June 2016; pp. 455–471. [Google Scholar]
- Camilli, R.; Bingham, B.; Reddy, C.M.; Nelson, R.K.; Duryea, A.N. Method for rapid localization of seafloor petroleum contamination using concurrent mass spectrometry and acoustic positioning. Mar. Pollut. Bull. 2009, 58, 1505–1513. [Google Scholar] [CrossRef] [PubMed]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Satellite | Launch Date | Owner/Operator | Band | Polarization |
|---|---|---|---|---|
| ERS-1 | 1991 (end 2000) | European Space Agency | C | |
| ERS-2 | 1995 (end 2011) | European Space Agency | C | VV |
| RADARSAT-1 | 1995 (end 2013) | Canadian Space Agency | C | HH |
| RADARSAT-2 | 2007 | Canadian Space Agency | C | |
| ENVISAT (ASAR) | 2002 (end 2012) | European Space Agency | C | HH, VV, Cross pol |
| ALOS (PALSAR) | 2006 (end 2011) | Japan Aerospace Exploration Agency | L | |
| TerraSAR-X | 2007 | German Aerospace Centre | X | |
| Tandem -X | 2010 | German Aerospace Centre | X | |
| Cosmo Skymed-1/2 | 2007, 2010 | Italian Space Agency | X | |
| TecSAR | 2008 | Israel Aerospace Industries | X | |
| Kompsat-5 | 2013 | Korean Space Agency | X | |
| Sentinel-1 | 2013 | European Space Agency | C | |
| RADARSAT-Constellation | 2018 | Canadian Space Agency | C | |
| (3-satellites) |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fingas, M.; Brown, C.E. A Review of Oil Spill Remote Sensing. Sensors 2018, 18, 91. https://doi.org/10.3390/s18010091
Fingas M, Brown CE. A Review of Oil Spill Remote Sensing. Sensors. 2018; 18(1):91. https://doi.org/10.3390/s18010091
Chicago/Turabian StyleFingas, Merv, and Carl E. Brown. 2018. "A Review of Oil Spill Remote Sensing" Sensors 18, no. 1: 91. https://doi.org/10.3390/s18010091
APA StyleFingas, M., & Brown, C. E. (2018). A Review of Oil Spill Remote Sensing. Sensors, 18(1), 91. https://doi.org/10.3390/s18010091