Electrical Design and Evaluation of Asynchronous Serial Bus Communication Network of 48 Sensor Platform LSIs with Single-Ended I/O for Integrated MEMS-LSI Sensors


Abstract
:1. Introduction
2. Sensor Platform LSI Network System
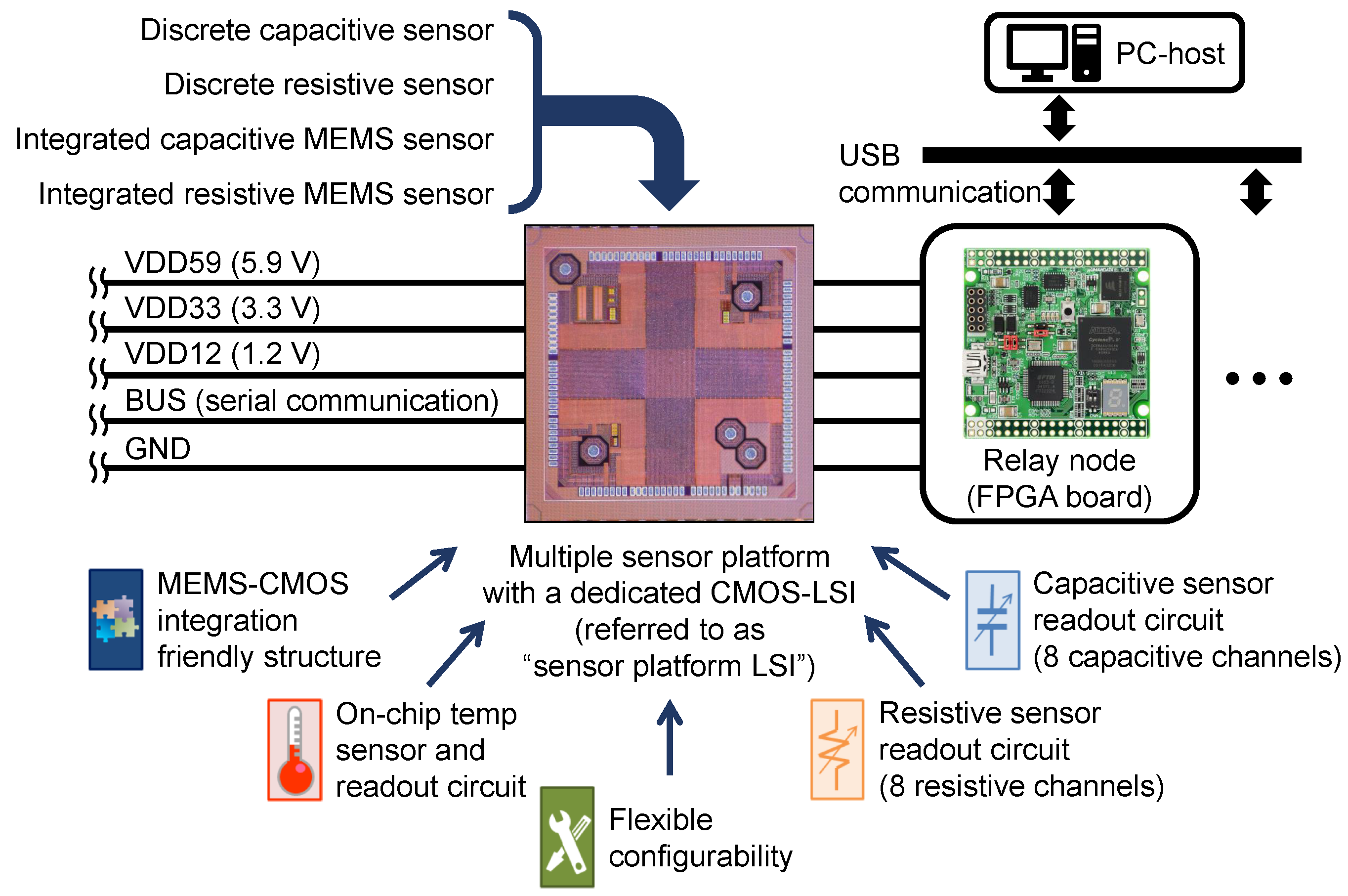
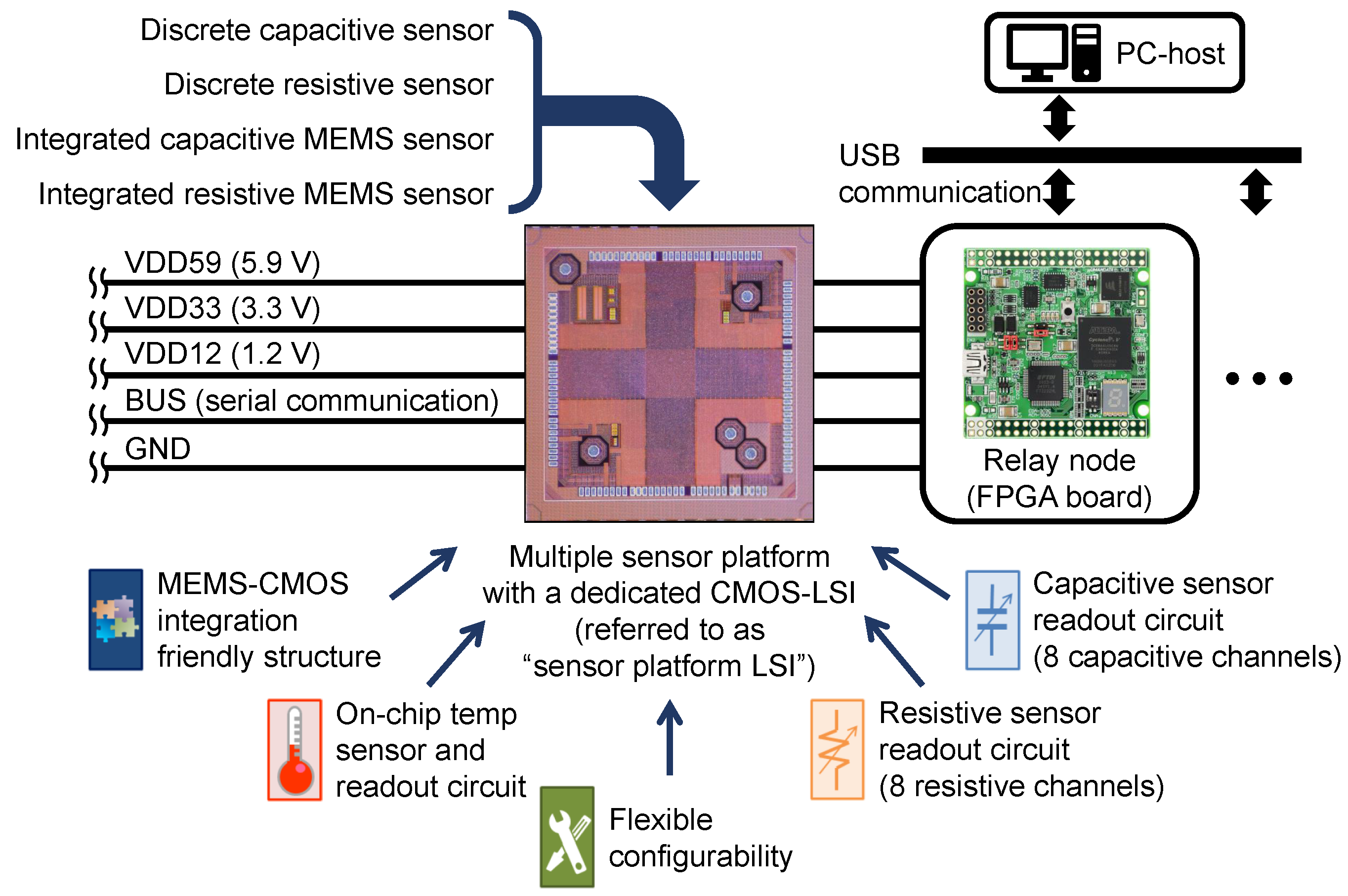
2.1. System Overview
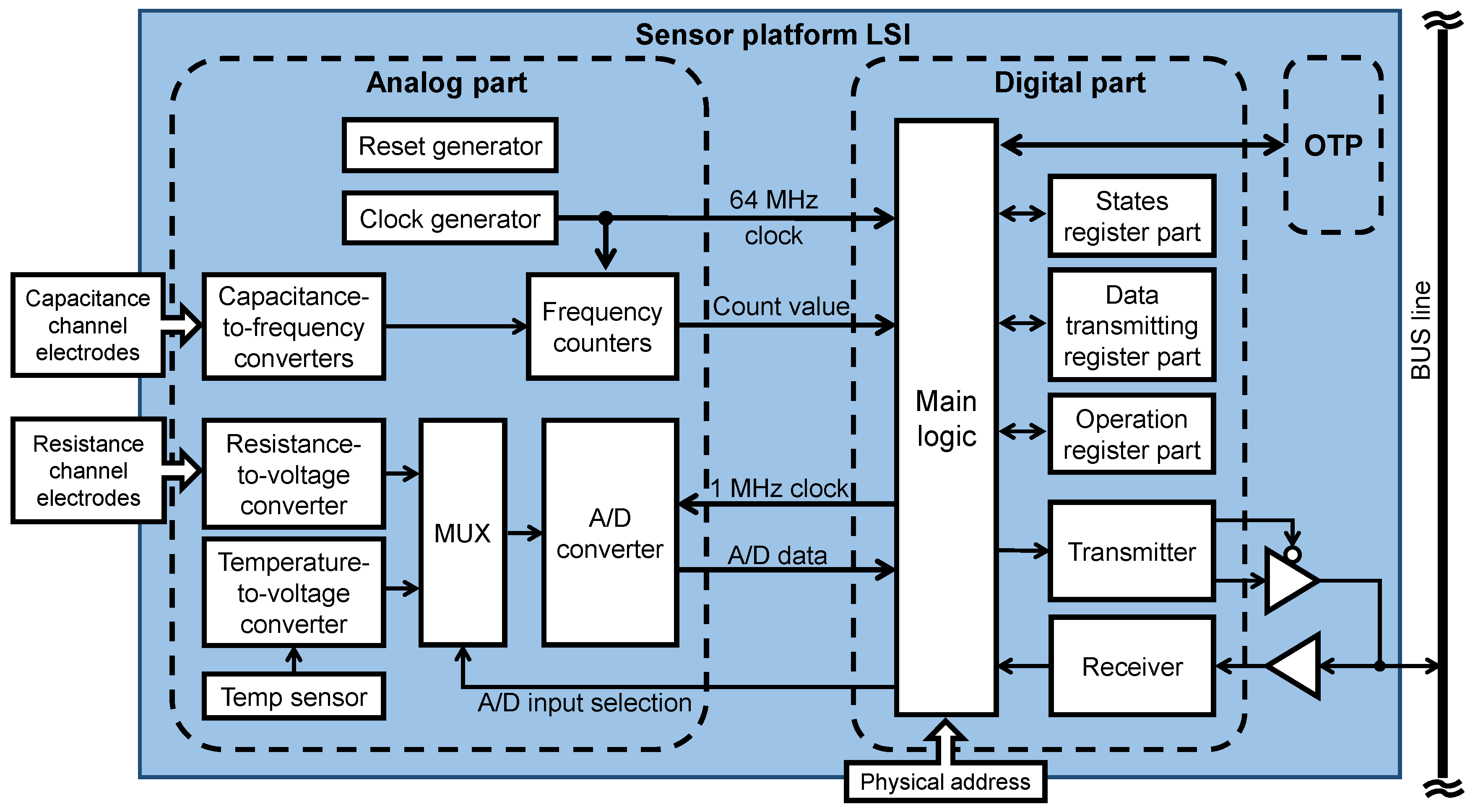
2.2. Sensor Platform LSI
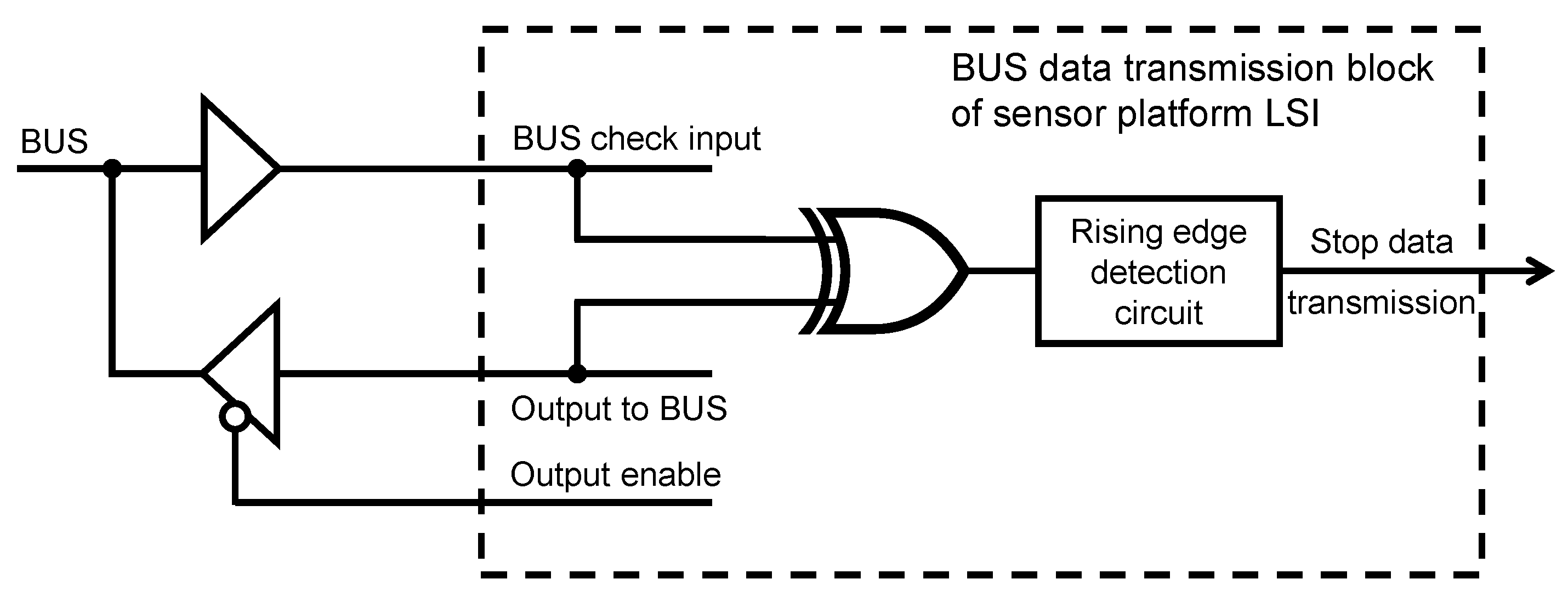
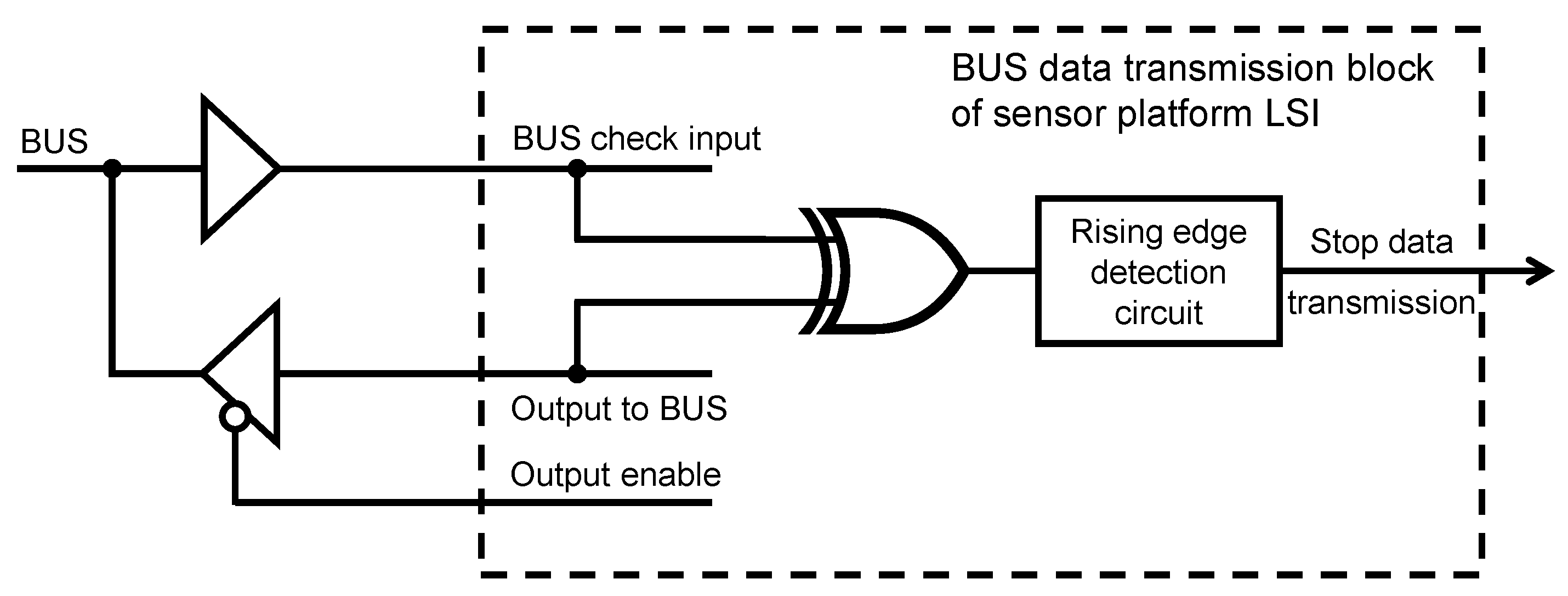
2.2.1. Collision Avoidance
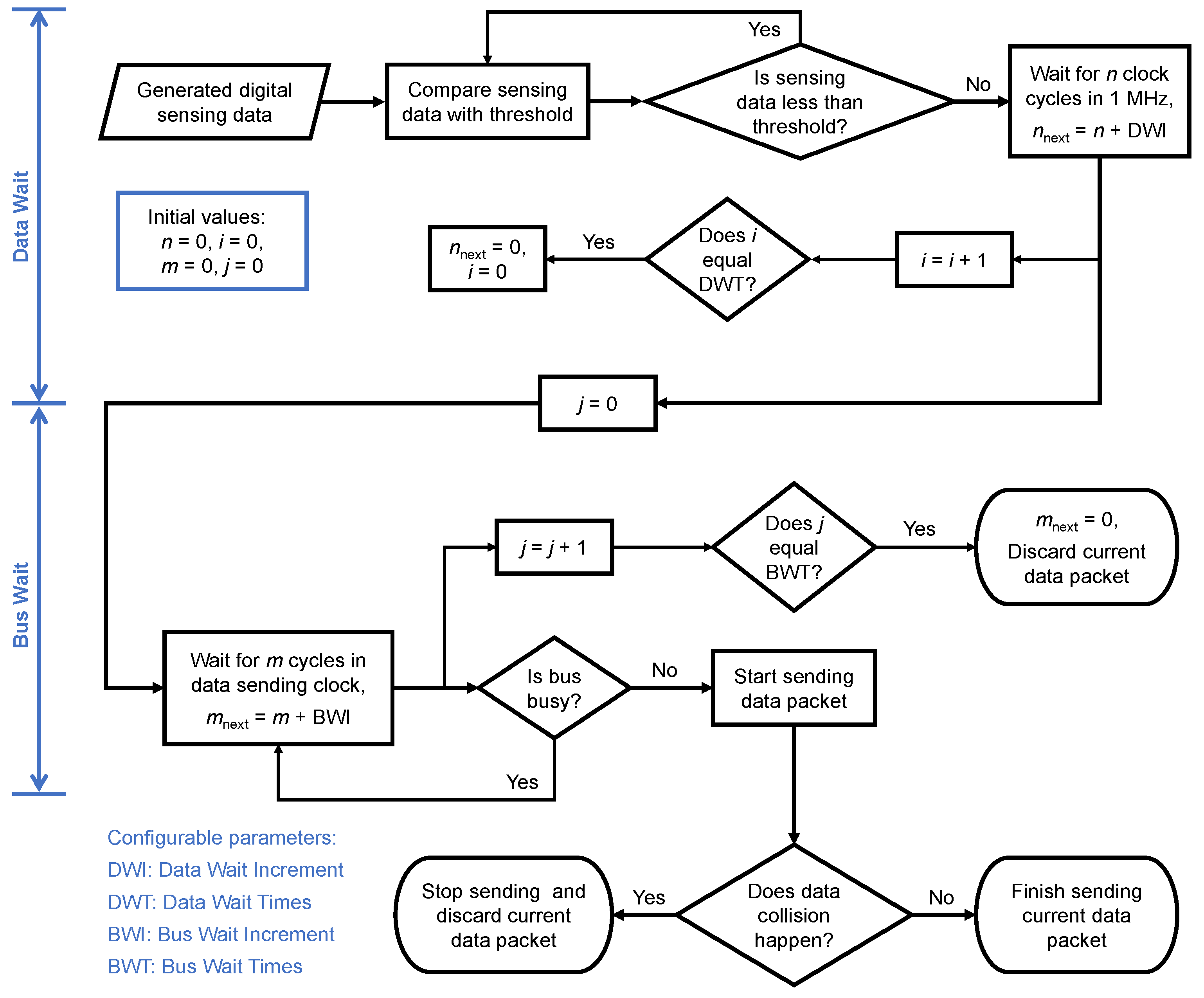
2.2.2. Adaptation Function
2.2.3. Event-Driven Function
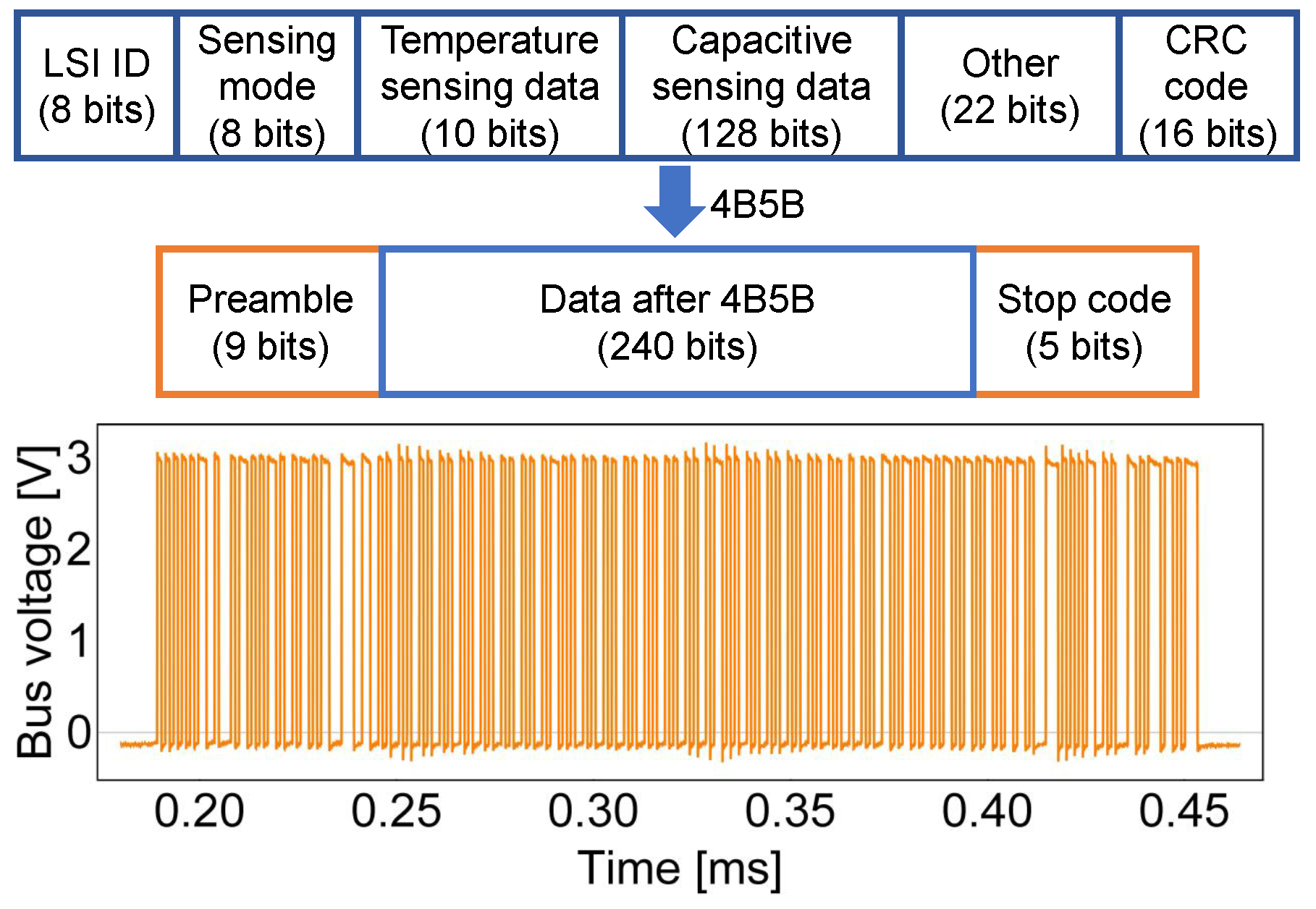
2.2.4. Configuration
3. Design of Serial Bus Network System
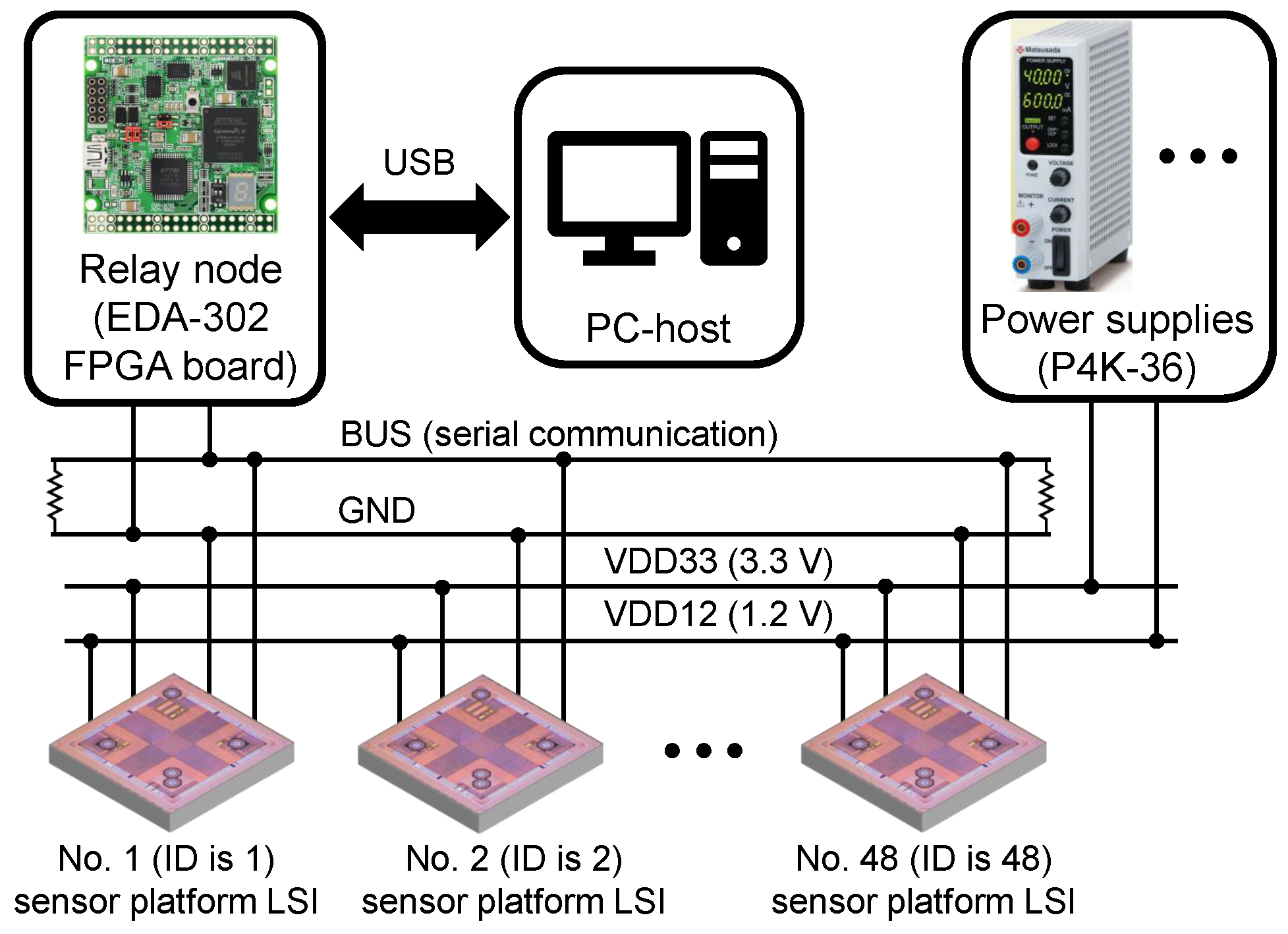
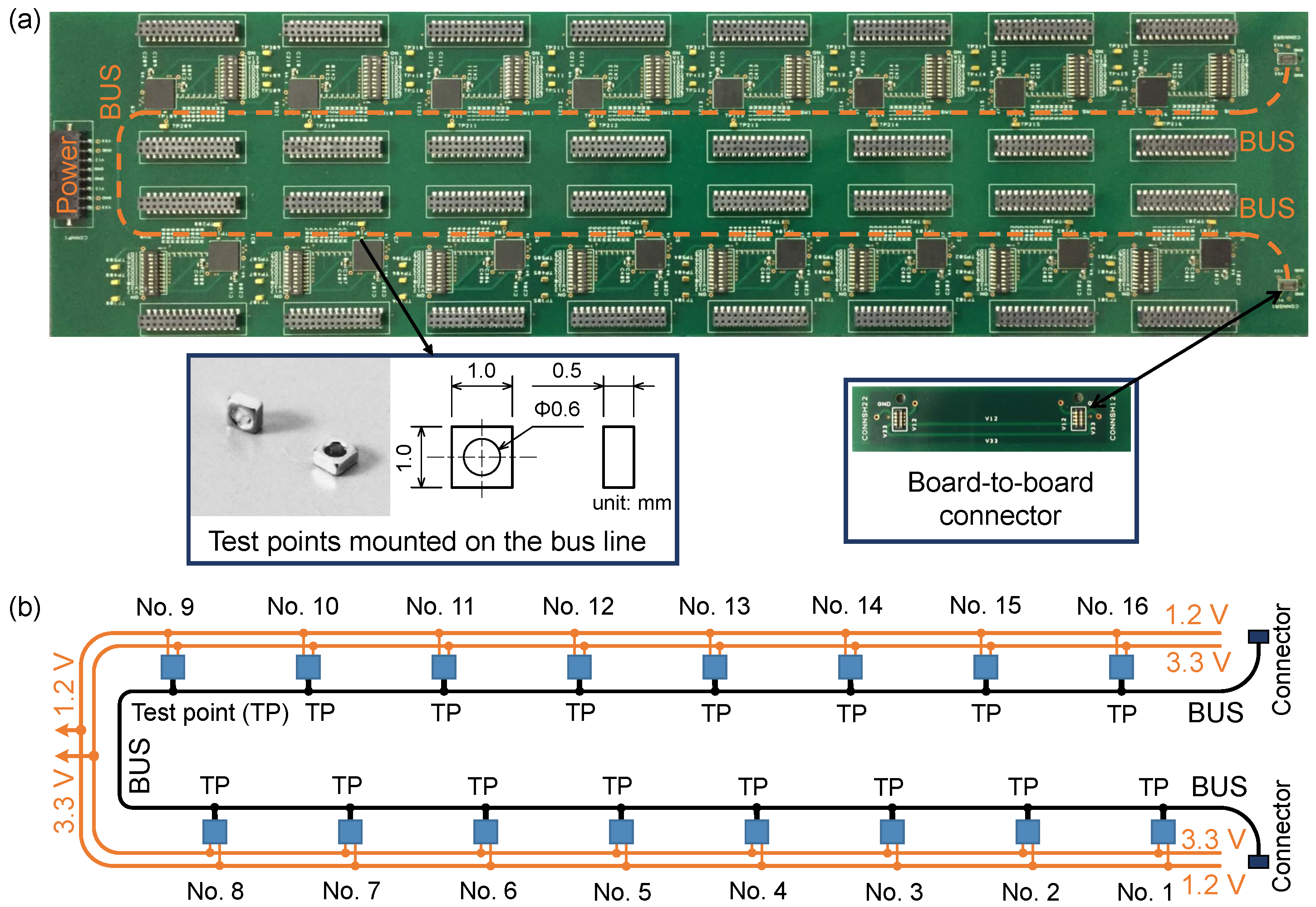
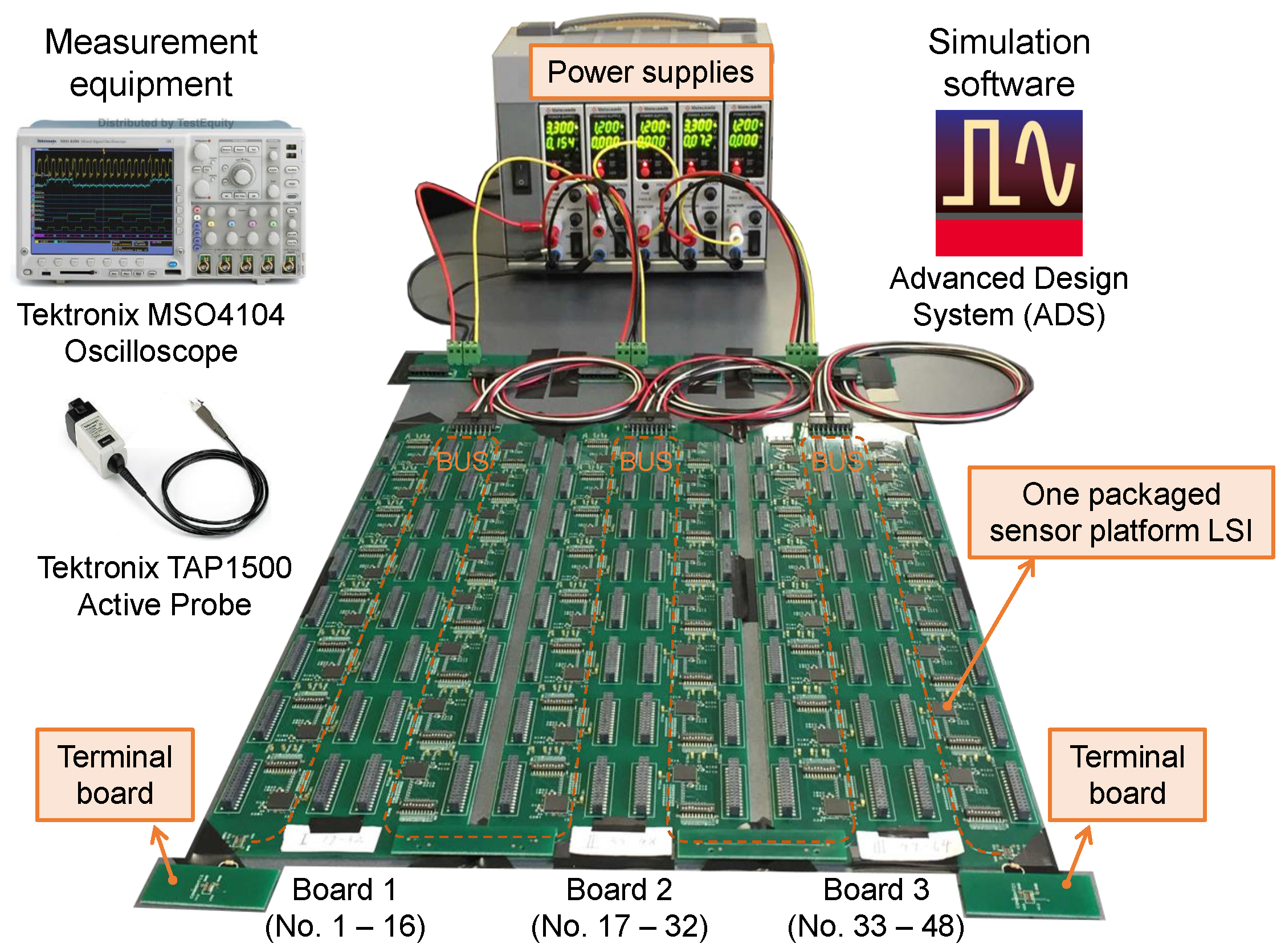
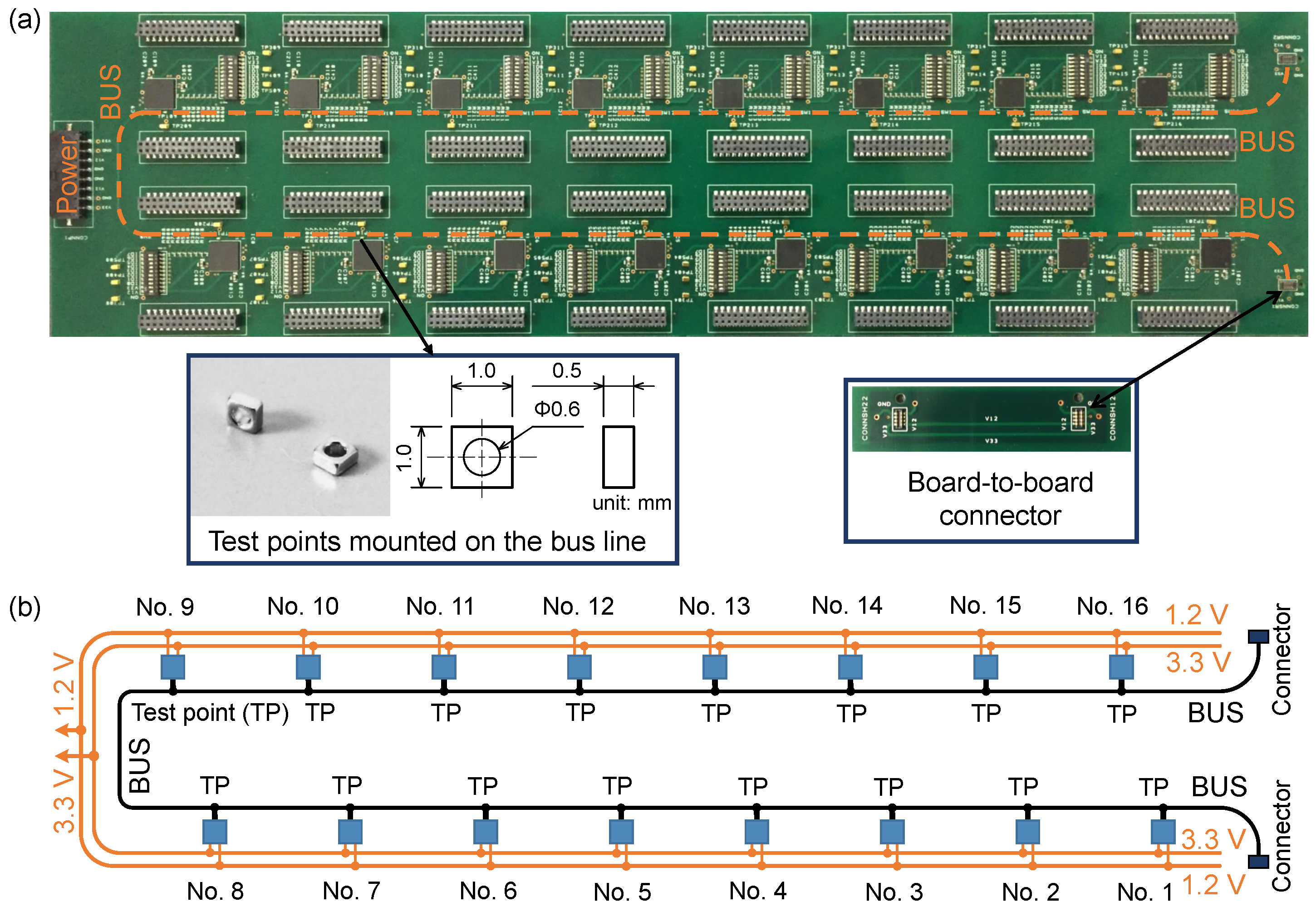
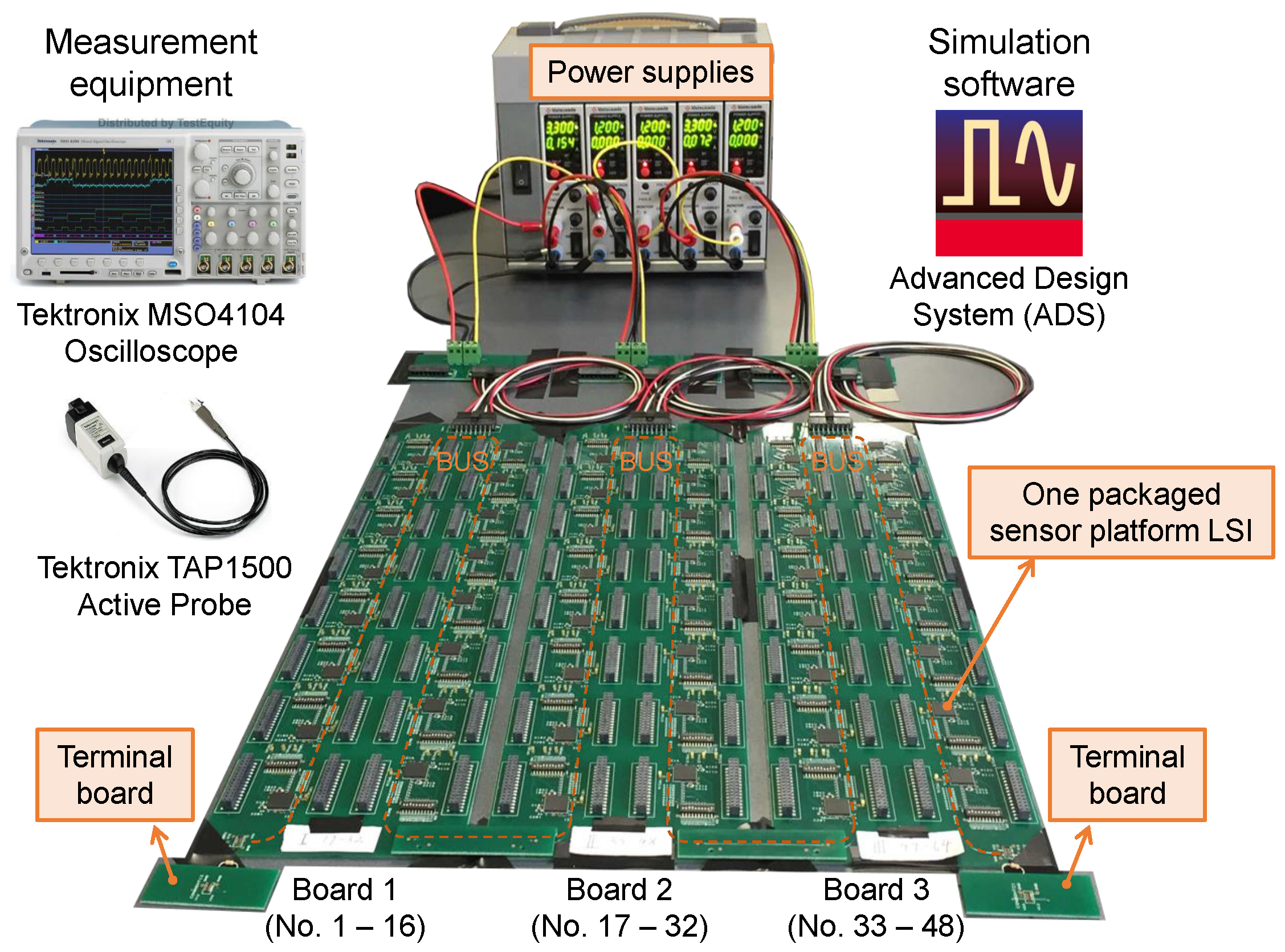
3.1. Design of Experimental Setup
3.2. Design of Characteristic Impedance and Termination of Serial Bus
4. Evaluation of Serial Bus Network System
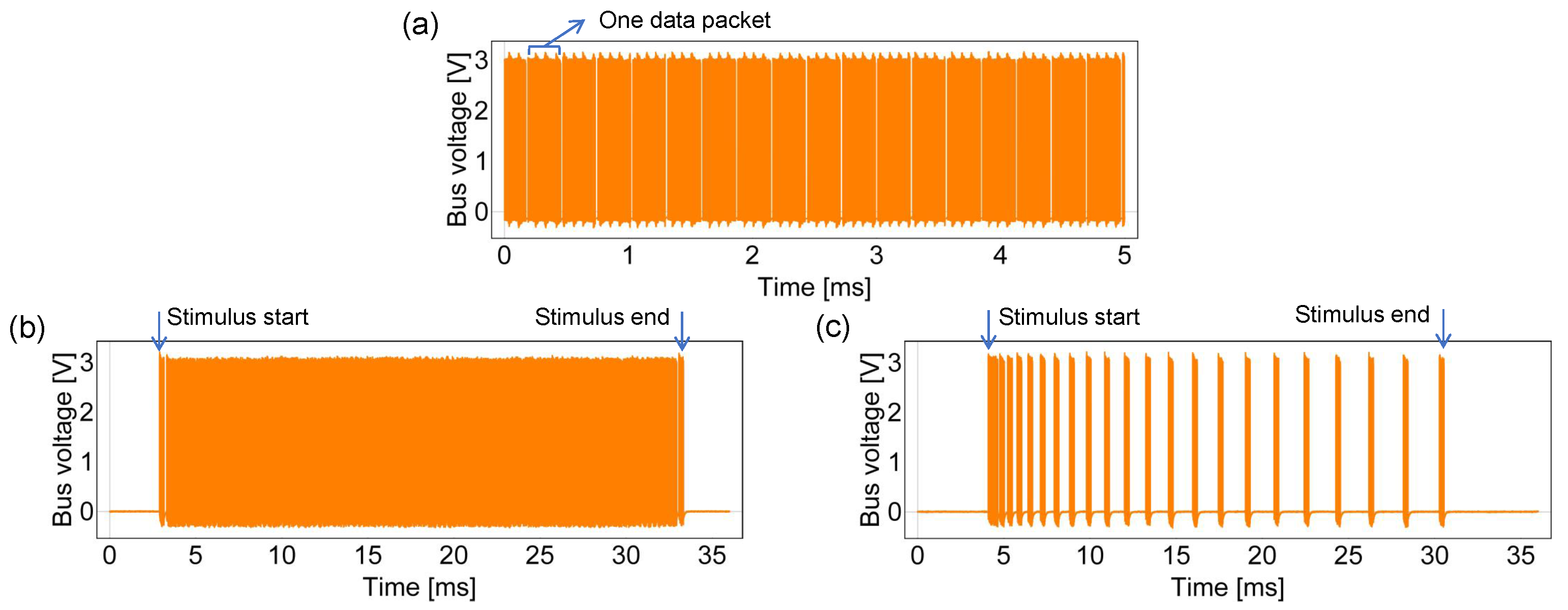
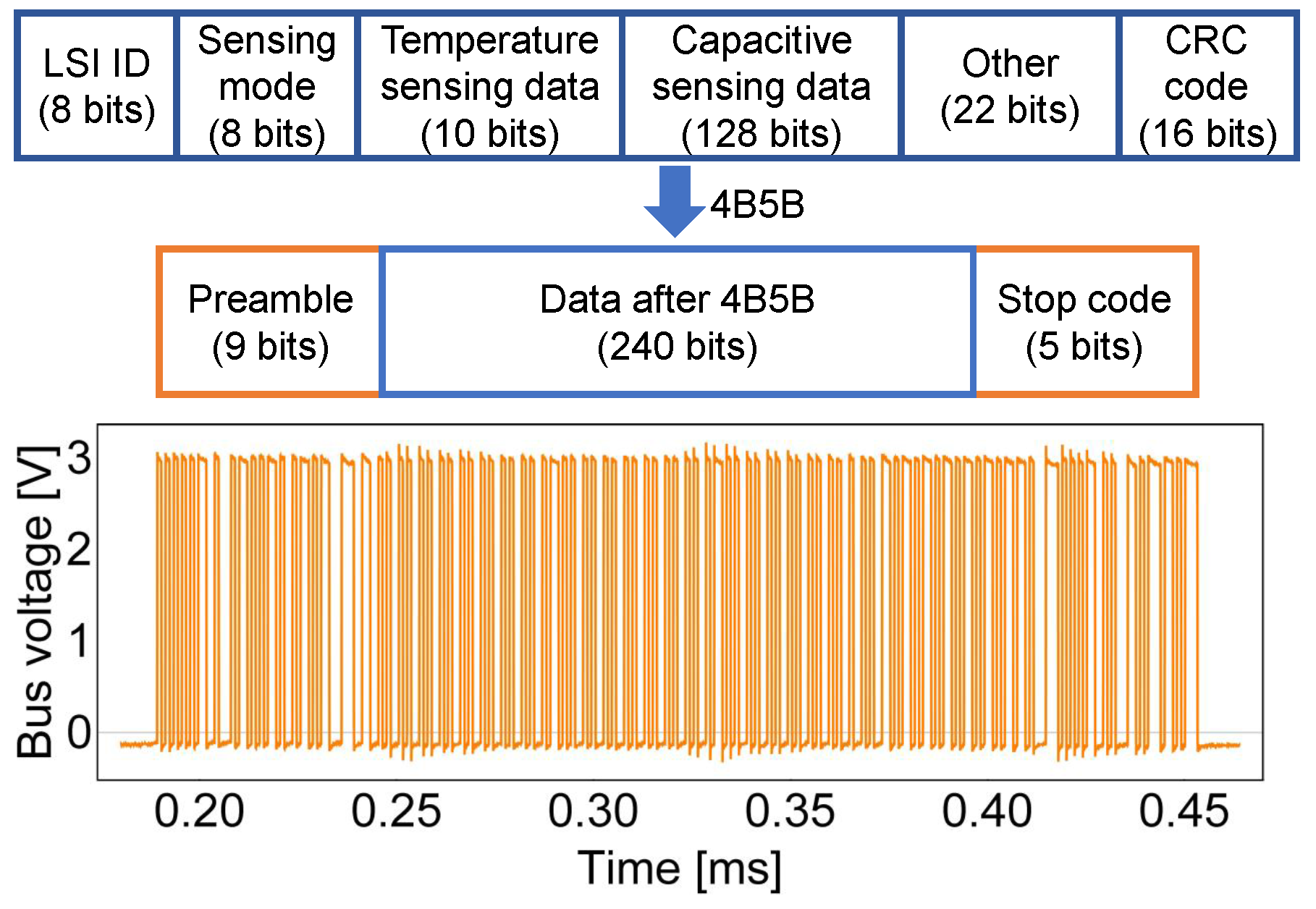
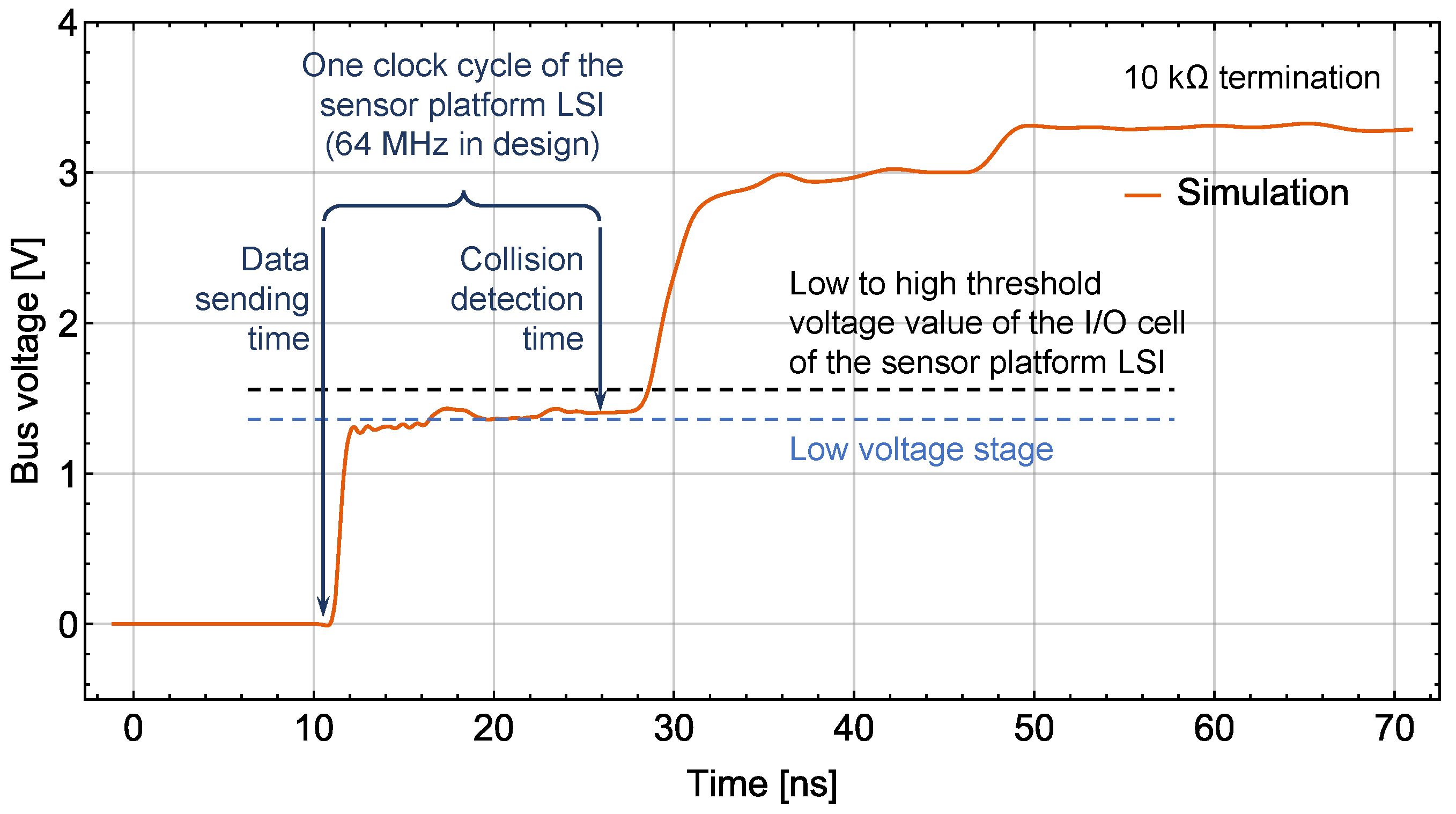
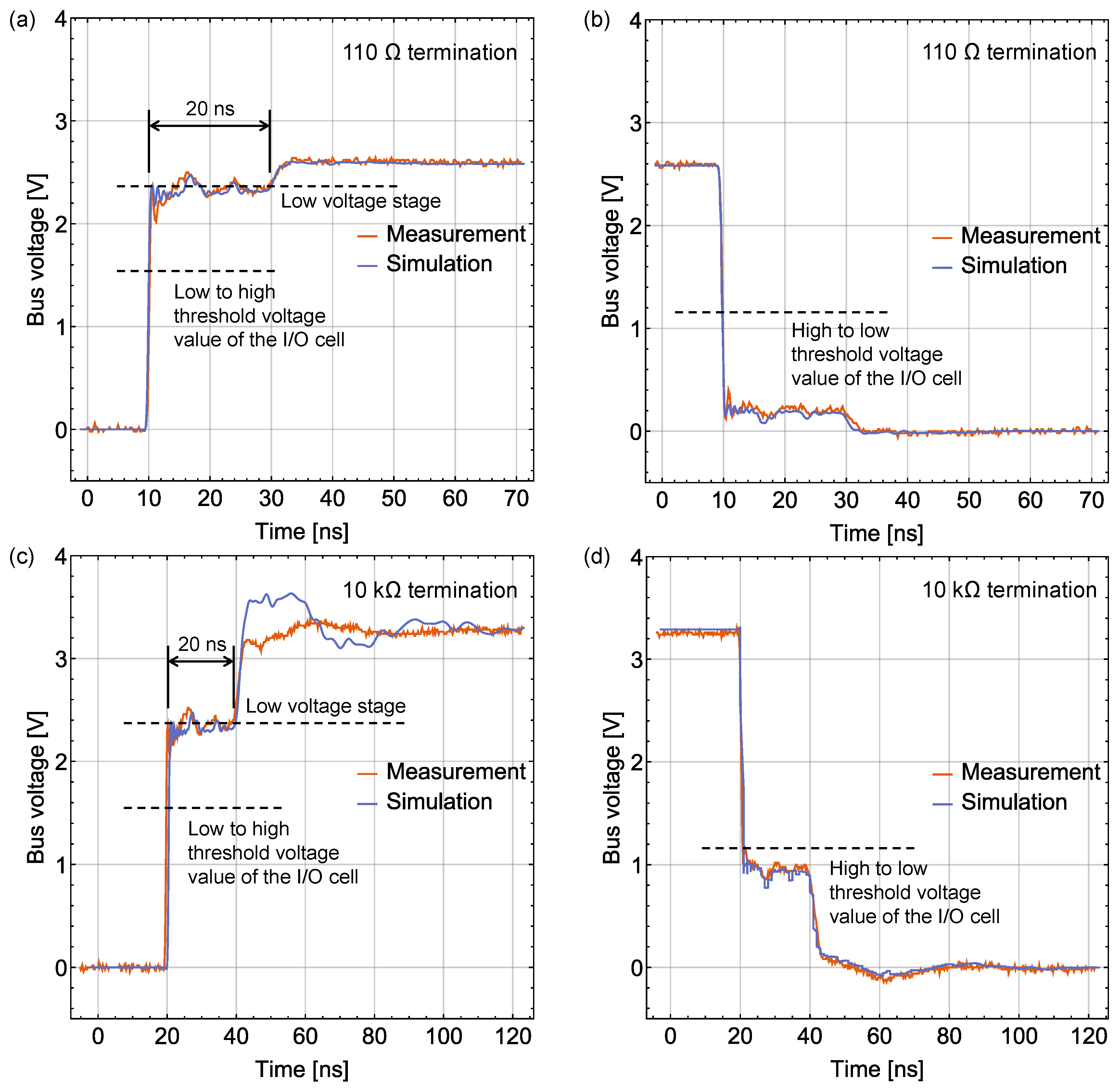
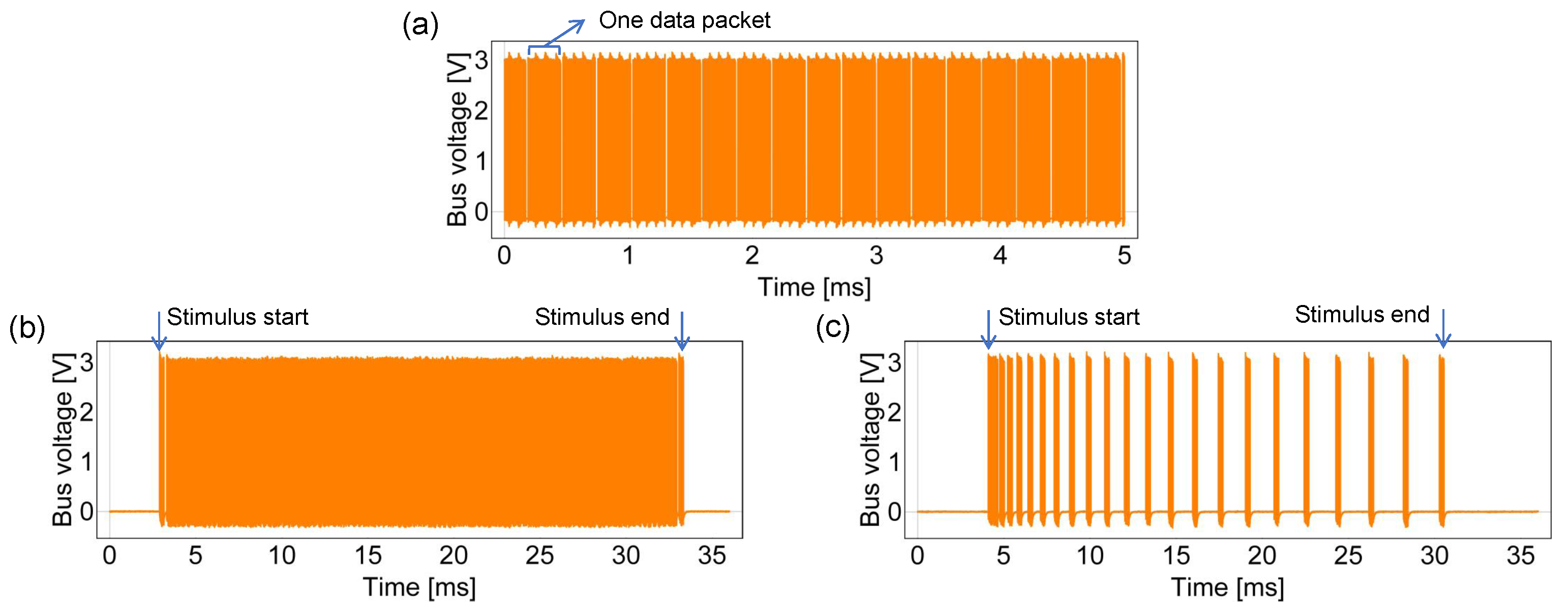
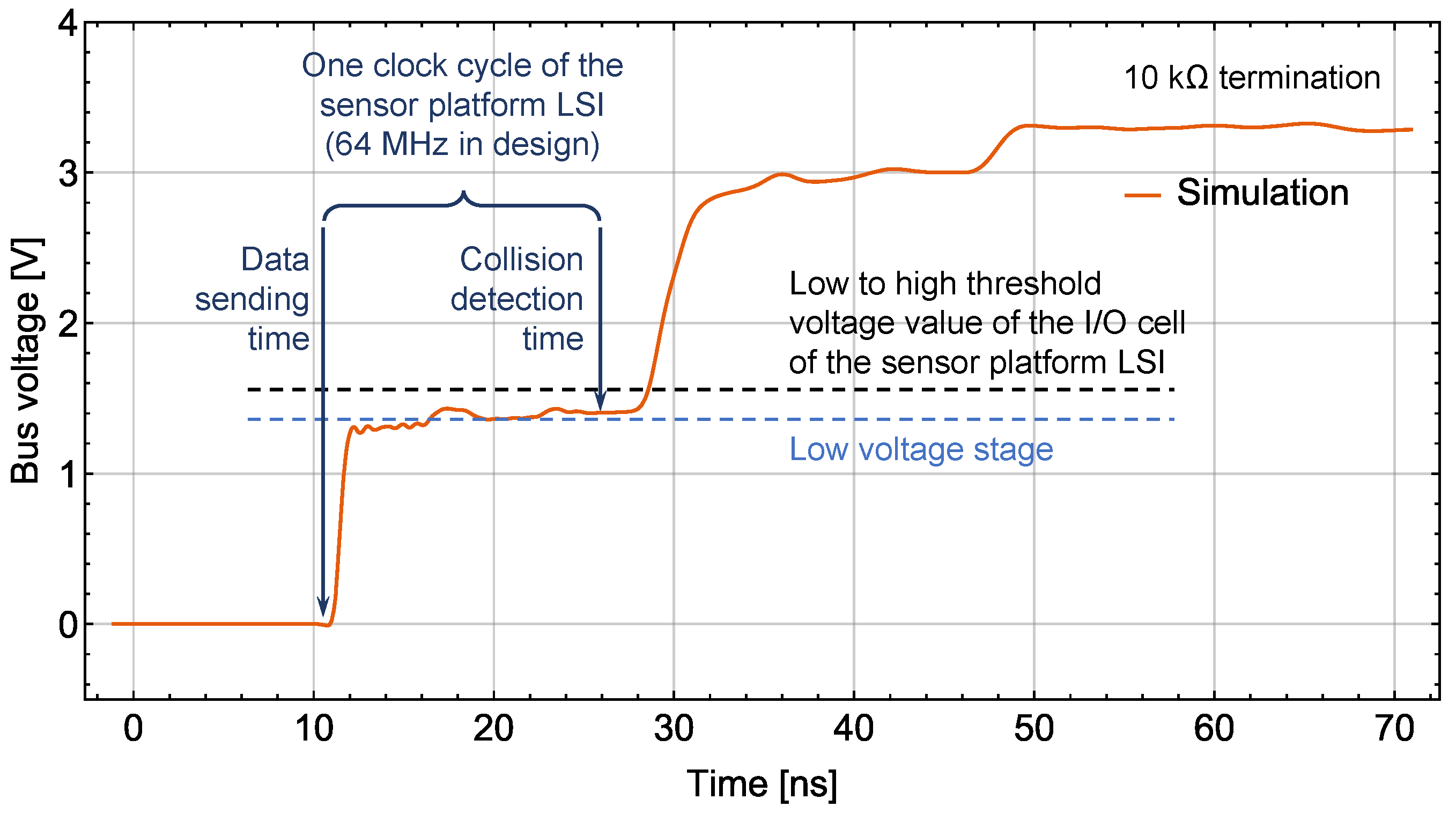
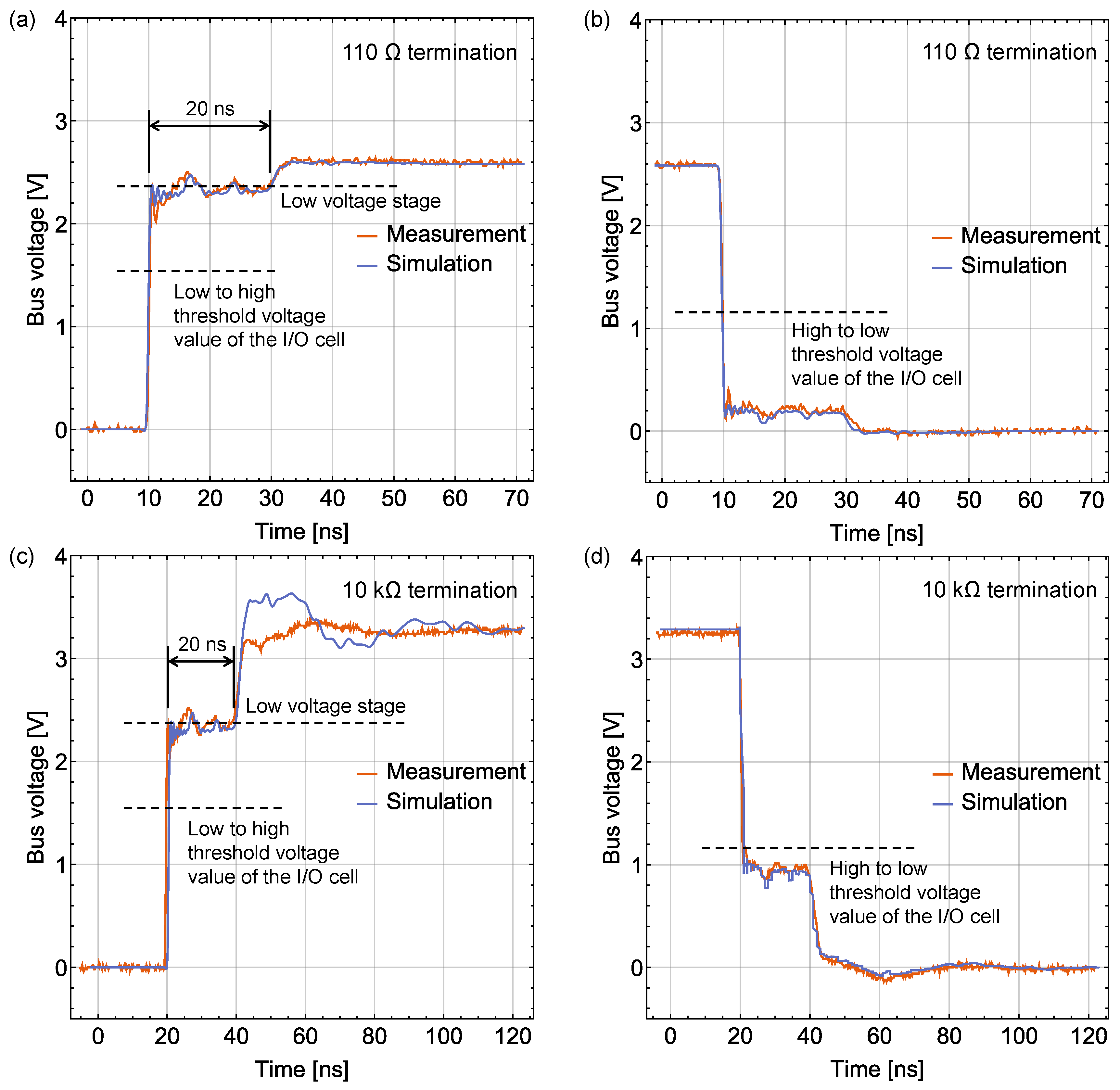
4.1. Signal Waveform
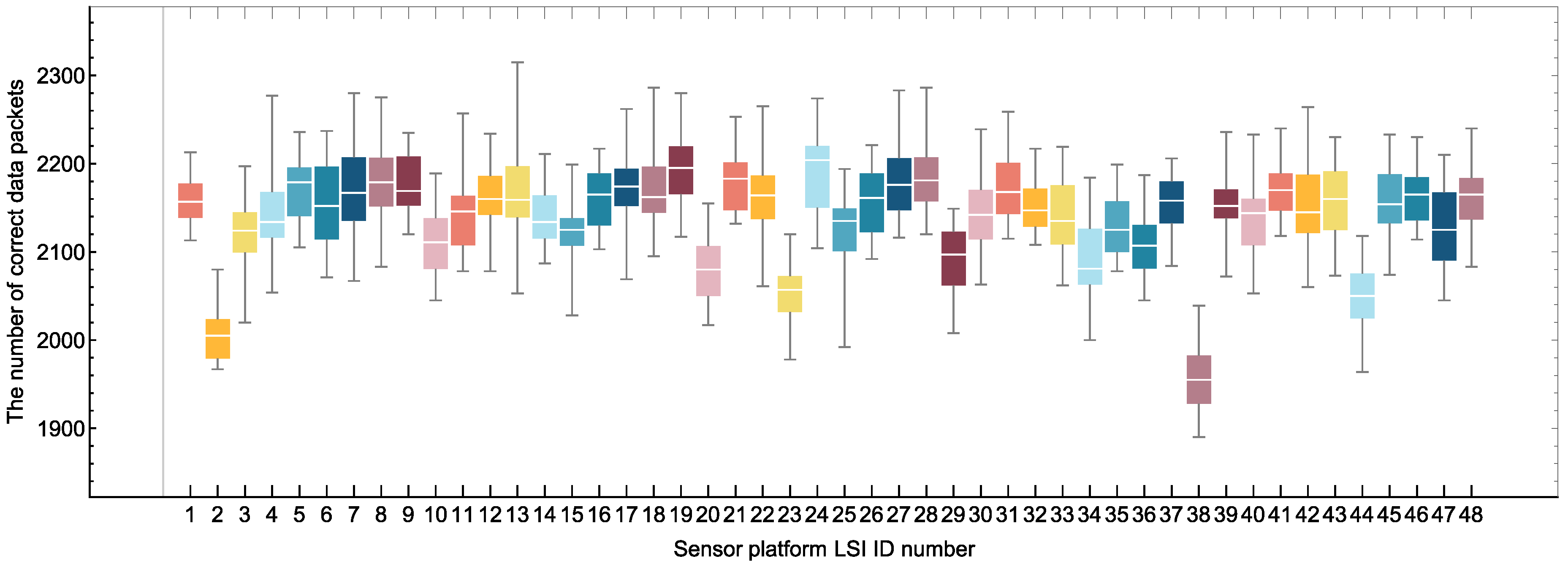
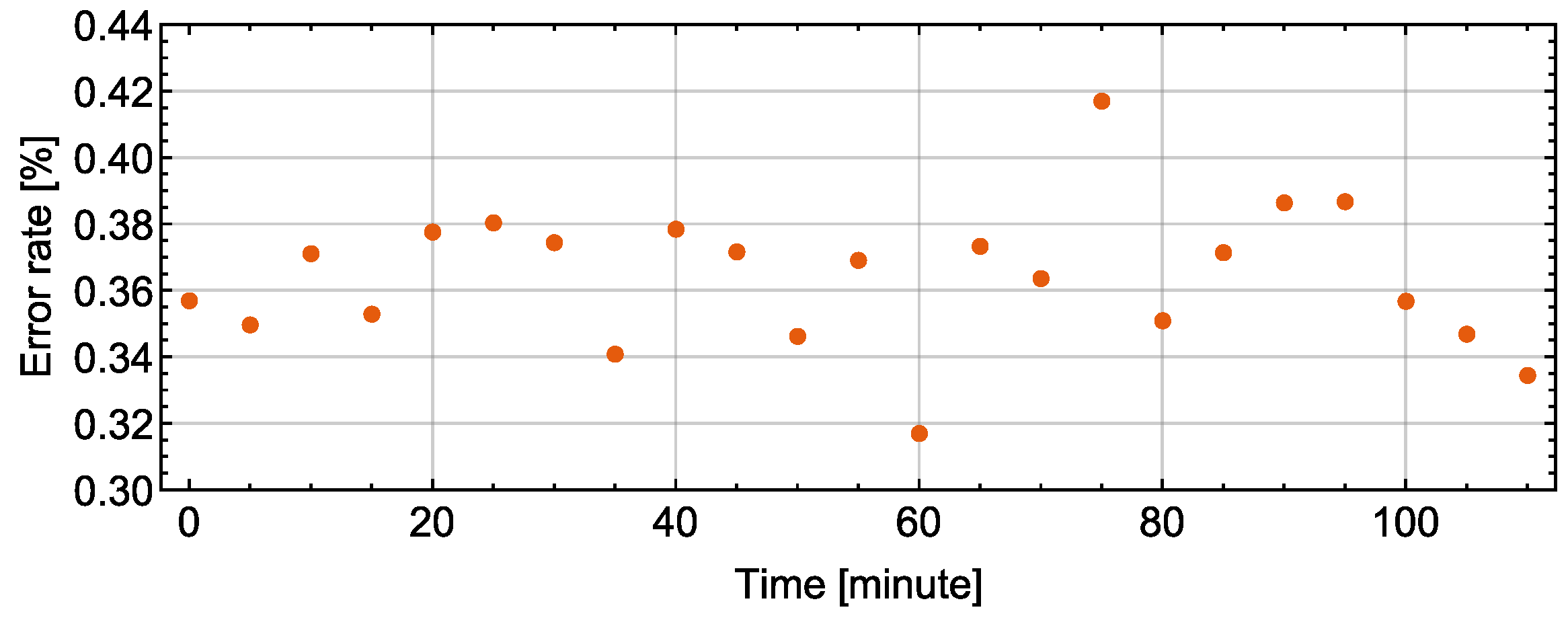
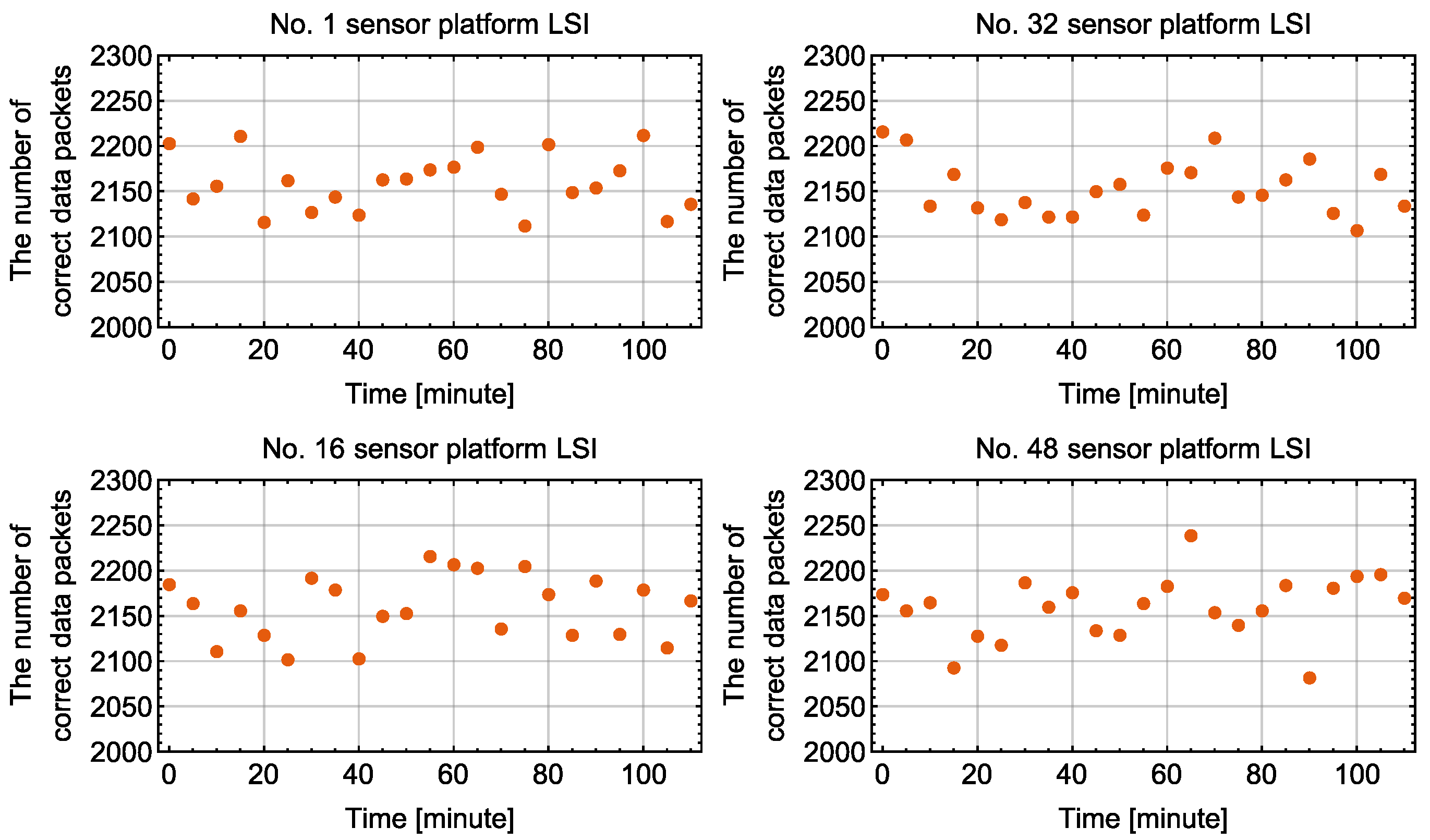
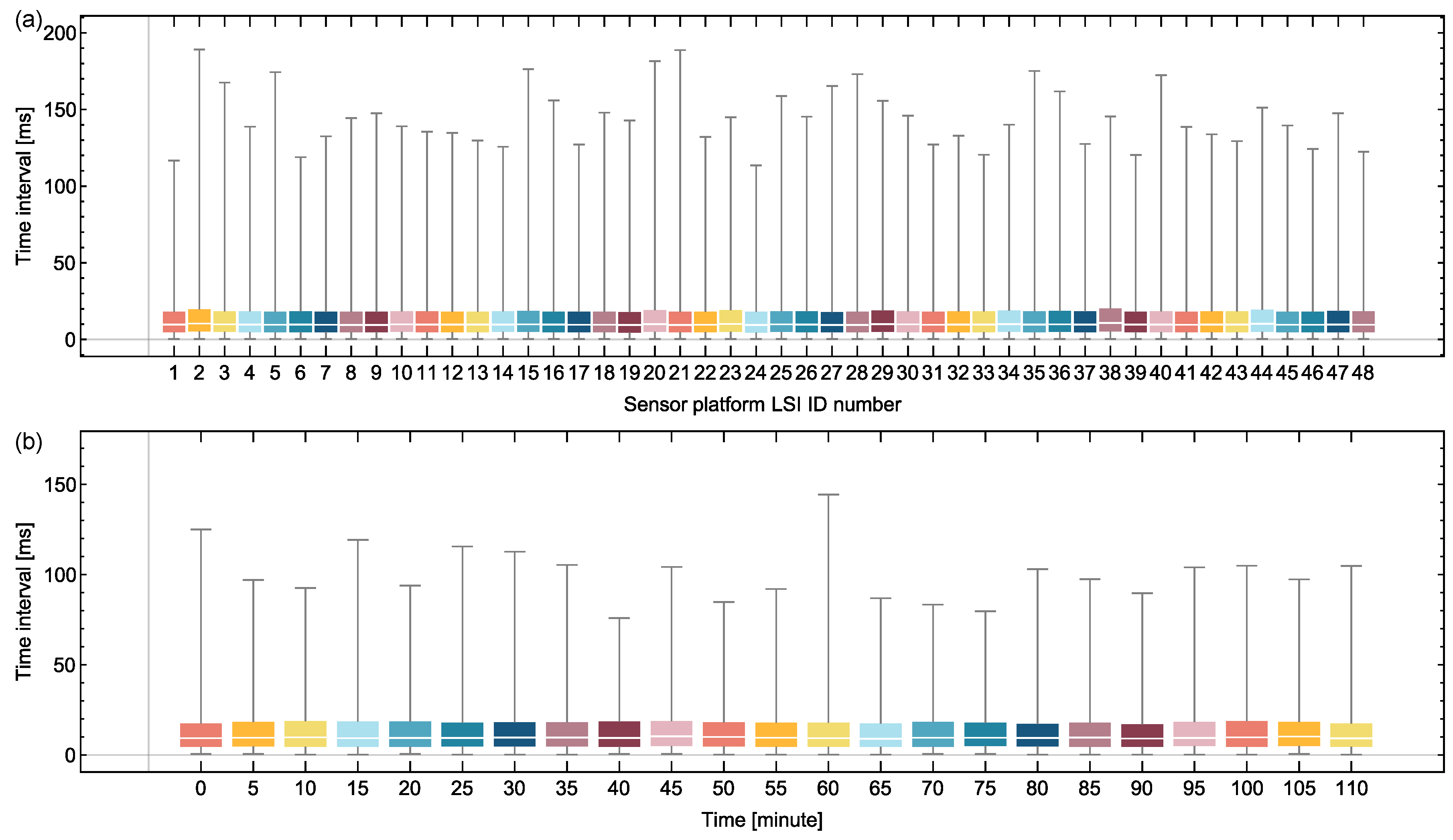
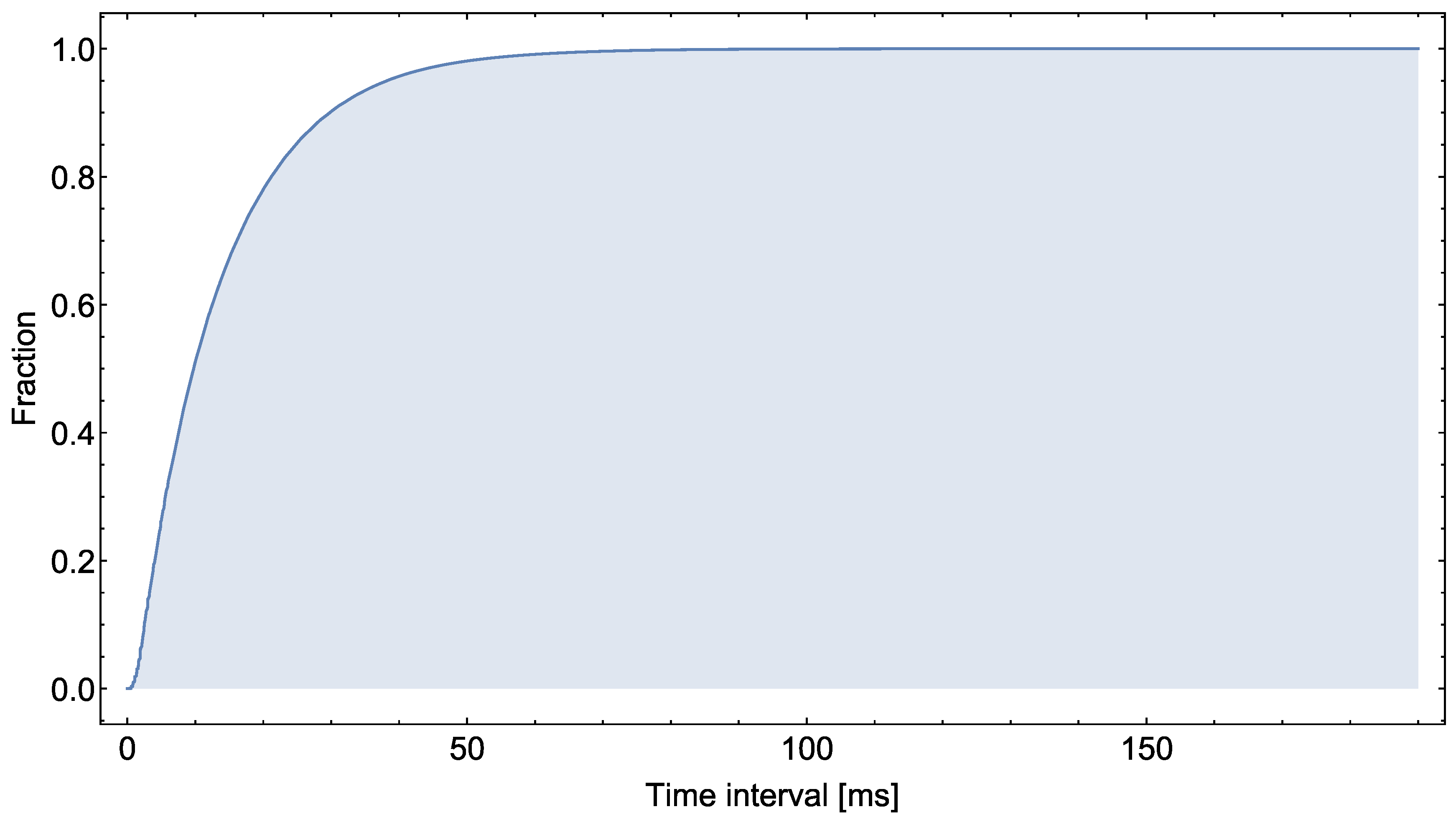
4.2. Serial Communication Analysis with Adaptation Function
4.3. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Silvera-Tawil, D.; Rye, D.; Velonaki, M. Artificial skin and tactile sensing for socially interactive robots: A review. Robot. Auton. Syst. 2015, 63, 230–243. [Google Scholar] [CrossRef]
- Liang, G.; Wang, Y.; Mei, D.; Xi, K.; Chen, Z. Flexible capacitive tactile sensor array with truncated pyramids as dielectric layer for three-axis force measurement. J. Microelectromech. Syst. 2015, 24, 1510–1519. [Google Scholar] [CrossRef]
- Cheng, M.; Huang, X.; Ma, C.; Yang, Y. A flexible capacitive tactile sensing array with floating electrodes. J. Micromech. Microeng. 2009, 19, 115001. [Google Scholar] [CrossRef]
- Lee, H.K.; Chang, S.I.; Yoon, E. A flexible polymer tactile sensor: Fabrication and modular expandability for large area deployment. J. Microelectromech. Syst. 2006, 15, 1681–1686. [Google Scholar] [CrossRef]
- Canavese, G.; Stassi, S.; Fallauto, C.; Corbellini, S.; Cauda, V.; Camarchia, V.; Pirola, M.; Pirri, C.F. Piezoresistive flexible composite for robotic tactile applications. Sens. Actuators A Phys. 2014, 208, 1–9. [Google Scholar] [CrossRef]
- Hoang, P.T.; Phung, H.; Nguyen, C.T.; Nguyen, T.D.; Choi, H.R. A highly flexible, stretchable and ultra-thin piezoresistive tactile sensor array using PAM/PEDOT: PSS hydrogel. In Proceedings of the 14th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), Jeju, Korea, 28 June–1 July 2017; pp. 950–955. [Google Scholar]
- Drimus, A.; Kootstra, G.; Bilberg, A.; Kragic, D. Design of a flexible tactile sensor for classification of rigid and deformable objects. Robot. Auton. Syst. 2014, 62, 3–15. [Google Scholar] [CrossRef]
- Yang, T.; Xie, D.; Li, Z.; Zhu, H. Recent advances in wearable tactile sensors: Materials, sensing mechanisms, and device performance. Mater. Sci. Eng. R Rep. 2017, 115, 1–37. [Google Scholar] [CrossRef]
- Vidal-Verdú, F.; Barquero, M.J.; Castellanos-Ramos, J.; Navas-González, R.; Sánchez, J.A.; Serón, J.; García-Cerezo, A. A large area tactile sensor patch based on commercial force sensors. Sensors 2011, 11, 5489–5507. [Google Scholar] [CrossRef] [PubMed]
- Yu, H.C.; Cheng, C.L.; Wu, P.H.; Li, S.J. Elastic Capacitive Tactile Array Pressure Sensor System. Sens. Mater. 2017, 29, 885–895. [Google Scholar]
- Maiolino, P.; Maggiali, M.; Cannata, G.; Metta, G.; Natale, L. A flexible and robust large scale capacitive tactile system for robots. IEEE Sens. J. 2013, 13, 3910–3917. [Google Scholar] [CrossRef]
- Odhner, L.U.; Jentoft, L.P.; Claffee, M.R.; Corson, N.; Tenzer, Y.; Ma, R.R.; Buehler, M.; Kohout, R.; Howe, R.D.; Dollar, A.M. A compliant, underactuated hand for robust manipulation. Int. J. Robot. Res. 2014, 33, 736–752. [Google Scholar] [CrossRef]
- Tenzer, Y.; Jentoft, L.P.; Howe, R.D. The feel of MEMS barometers: Inexpensive and easily customized tactile array sensors. IEEE Robot. Autom. Mag. 2014, 21, 89–95. [Google Scholar] [CrossRef]
- Muroyama, M.; Nakayama, T.; Hata, Y.; Nonomura, Y.; Bartley, T.; Tanaka, S. A CMOS-LSI for a sensor network platform of social robot applications. In Proceedings of the Smart Systems Integration 2016, Munich, Germany, 9–10 March 2016; pp. 320–327. [Google Scholar]
- Shao, C.; Tanaka, S.; Nakayama, T.; Hata, Y.; Bartley, T.; Nonomura, Y.; Muroyama, M. A Tactile Sensor Network System Using a Multiple Sensor Platform with a Dedicated CMOS-LSI for Robot Applications. Sensors 2017, 17, 1974. [Google Scholar] [CrossRef] [PubMed]
- Dahiya, R.S.; Metta, G.; Valle, M.; Sandini, G. Tactile Sensing—From Humans to Humanoids. IEEE Trans. Robot. 2010, 26, 1–20. [Google Scholar] [CrossRef]
- Makihata, M.; Muroyama, M.; Nakano, Y.; Tanaka, S.; Nakayama, T.; Yamaguchi, U.; Yamada, H.; Nonomura, Y.; Funabashi, H.; Hata, Y.; et al. A 1.7 mm3 MEMS-on-CMOS tactile sensor using human-inspired autonomous common bus communication. In Proceedings of the 17th International Conference on Solid-State Sensors, Actuators and Microsystems (TRANSDUCERS & EUROSENSORS XXVII), Barcelona, Spain, 16–20 June 2013; pp. 2729–2732. [Google Scholar]
- Asano, S.; Muroyama, M.; Nakayama, T.; Hata, Y.; Nonomura, Y.; Tanaka, S. 3-Axis Fully-Integrated Capacitive Tactile Sensor with Flip-Bonded CMOS on LTCC Interposer. Sensors 2017, 17, 2451. [Google Scholar] [CrossRef] [PubMed]
- Bartley, T.; Tanaka, S.; Nonomura, Y.; Nakayama, T.; Hata, Y.; Muroyama, M. Sensor network serial communication system with high tolerance to timing and topology variations. In Proceedings of the 2015 IEEE SENSORS, Busan, Korea, 1–4 November 2015; pp. 1–4. [Google Scholar]
- Bartley, T.; Tanaka, S.; Nonomura, Y.; Nakayama, T.; Muroyama, M. Delay window blind oversampling clock and data recovery algorithm with wide tracking range. In Proceedings of the IEEE International Symposium on Circuits and Systems (ISCAS), Lisbon, Portugal, 24–27 May 2015; pp. 1598–1601. [Google Scholar]
- Akkaya, K.; Younis, M. A survey on routing protocols for wireless sensor networks. Ad Hoc Netw. 2005, 3, 325–349. [Google Scholar] [CrossRef]
- Miskowicz, M. Send-on-delta concept: An event-based data reporting strategy. Sensors 2006, 6, 49–63. [Google Scholar] [CrossRef]
- Coombs, C.F.; Holden, H. Printed Circuits Handbook, Seventh Edition; McGraw-Hill Education: New York, NY, USA, 2016; pp. 1485–1486. [Google Scholar]
- Rahmani, M.; Muller-Rathgeber, B.; Steinbach, E. Error detection capabilities of automotive network technologies and ethernet-A comparative study. In Proceedings of the IEEE Intelligent Vehicles Symposium, Istanbul, Turkey, 13–15 June 2007; pp. 674–679. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| System Structure | Sensor Output Digitization Place | Force Sensing Principle | The Number of Capacitance or Resistance Channels | Covering Area | The Number of Analog-to-Digital Converters (ADC) | Sampling Frequency (Hz) | Reference |
|---|---|---|---|---|---|---|---|
| Tactile sensor array with scanning readout circuitry | Off the sensor array | Capacitive | 1 (AD7153) | 3 | [2] | ||
| 1 (ADuC841) | n.a. | [3] | |||||
| 1 | 20 | [4] | |||||
| Resistive | 1 (PIC18F2523) | 16 | [5] | ||||
| 1 (dsPIC30F5015) | n.a. | [6] | |||||
| 1 (dsPIC33FJ256) | 100 | [7] | |||||
| Serial bus-based tactile sensor network | At the place of sensation | Capacitive | 16 (AD7147) | 25 | [11] | ||
| 114 | n.a. | 114 (MPL115A2) | 50 | [12] | |||
| Capacitive or resistive plus temperature sensing | 2.4 (bus line length) | 73.66 (mean) 5.3 (worst) | This work |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shao, C.; Tanaka, S.; Nakayama, T.; Hata, Y.; Muroyama, M. Electrical Design and Evaluation of Asynchronous Serial Bus Communication Network of 48 Sensor Platform LSIs with Single-Ended I/O for Integrated MEMS-LSI Sensors. Sensors 2018, 18, 231. https://doi.org/10.3390/s18010231
Shao C, Tanaka S, Nakayama T, Hata Y, Muroyama M. Electrical Design and Evaluation of Asynchronous Serial Bus Communication Network of 48 Sensor Platform LSIs with Single-Ended I/O for Integrated MEMS-LSI Sensors. Sensors. 2018; 18(1):231. https://doi.org/10.3390/s18010231
Chicago/Turabian StyleShao, Chenzhong, Shuji Tanaka, Takahiro Nakayama, Yoshiyuki Hata, and Masanori Muroyama. 2018. "Electrical Design and Evaluation of Asynchronous Serial Bus Communication Network of 48 Sensor Platform LSIs with Single-Ended I/O for Integrated MEMS-LSI Sensors" Sensors 18, no. 1: 231. https://doi.org/10.3390/s18010231
APA StyleShao, C., Tanaka, S., Nakayama, T., Hata, Y., & Muroyama, M. (2018). Electrical Design and Evaluation of Asynchronous Serial Bus Communication Network of 48 Sensor Platform LSIs with Single-Ended I/O for Integrated MEMS-LSI Sensors. Sensors, 18(1), 231. https://doi.org/10.3390/s18010231