Improved Coarray Interpolation Algorithms with Additional Orthogonal Constraint for Cyclostationary Signals

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- We investigate the array interpolation techniques with the cyclostationary signals, building up the difference coarray model and the sum coarray model by utilizing the structure of the CCM and CCCM in a coprime array, and then formulate the array interpolation as a Toeplitz completion problem and a Hankel completion problem.
- We define the spatial spectrum sampling operations, and prove that they can extract the entire power spectrum associated with the CCM and the CCCM. After vectorization of the spatial sampling operations, we show that the vectorization of the sampling correlation matrices lies in the subspaces, which are called the (conjugate) correlation subspaces.
- We build orthogonal constraints for the autocorrelation vectors in the coarray domains according to the (conjugate) correlation subspaces. Prior knowledge of the source interval can be incorporated into the orthogonal constraints, which can help to improve the performance of the structured matrix completion remarkably.
2. Cyclostationary Signal Model and the Coprime Coarray Model
2.1. Cyclostationary Signal Model
2.2. Coprime Coarray Model
3. (Conjugate) Correlation Subspaces and the Proposed Coarray Interpolation Algorithms
3.1. (Conjugate) Correlation Subspaces
3.2. Coarray Interpolation Algorithms
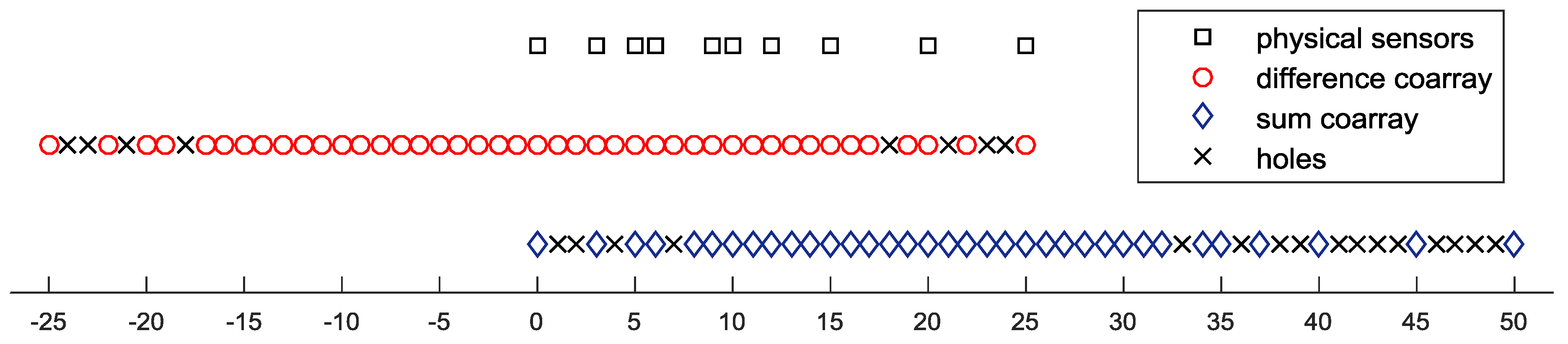
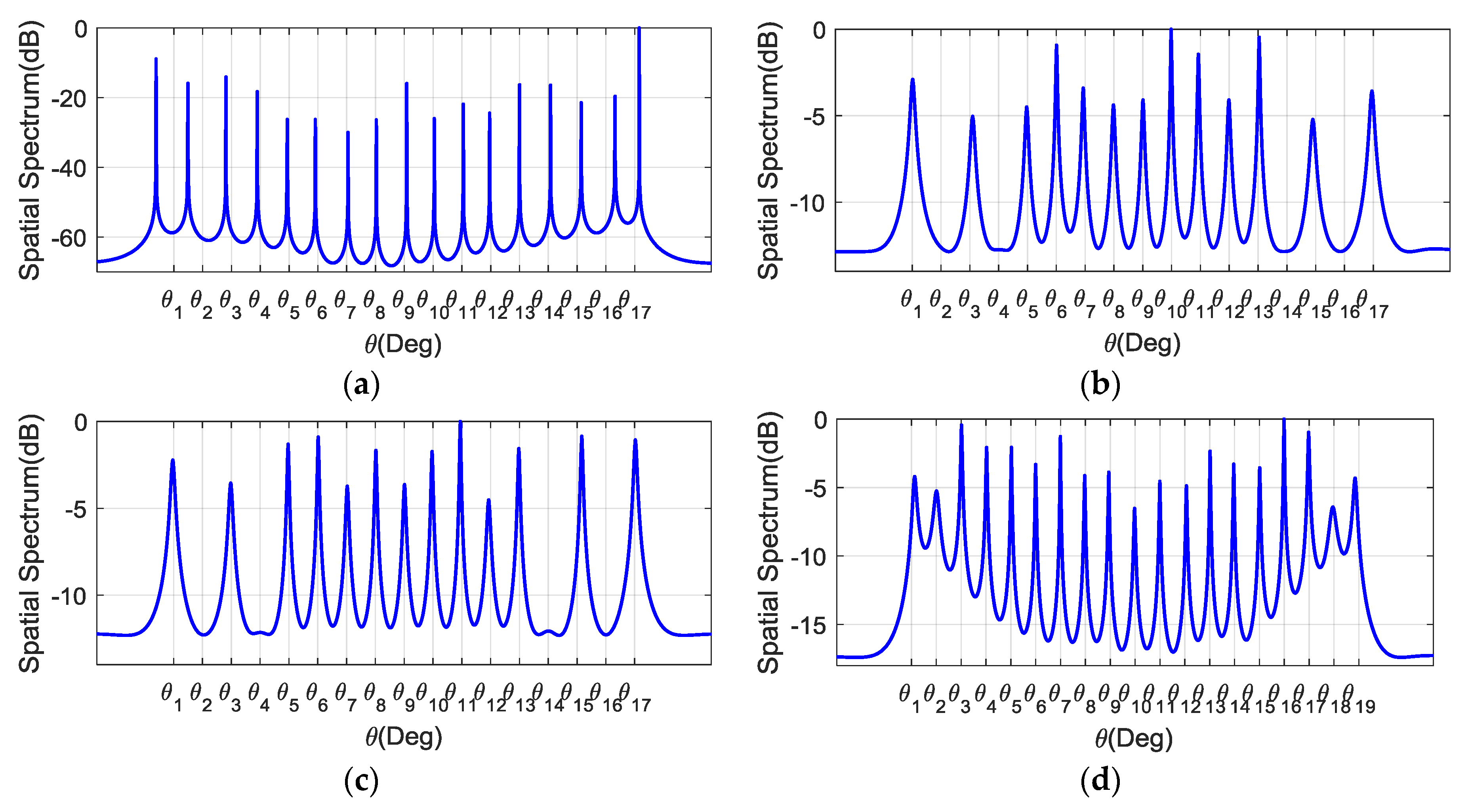
- Even though the recovered matrices and can be considered as the correlation matrices of a ULA with sensors, the DOFs cannot achieve due to the fact that the filled lags do not provide additional information on the sources. The actual freedom is governed by the nonuniform grid . For the coprime array illustrated in Figure 1, the numbers of the nonuniform grids for the difference coarray and the sum coarray are and , respectively. Thus, for a modulated signal that has both the cyclostationarity and the conjugate cyclostationarity property, the difference coarray model-based Toeplitz completion algorithm can resolve more sources than the sum coarray model-based Hankel completion algorithm.
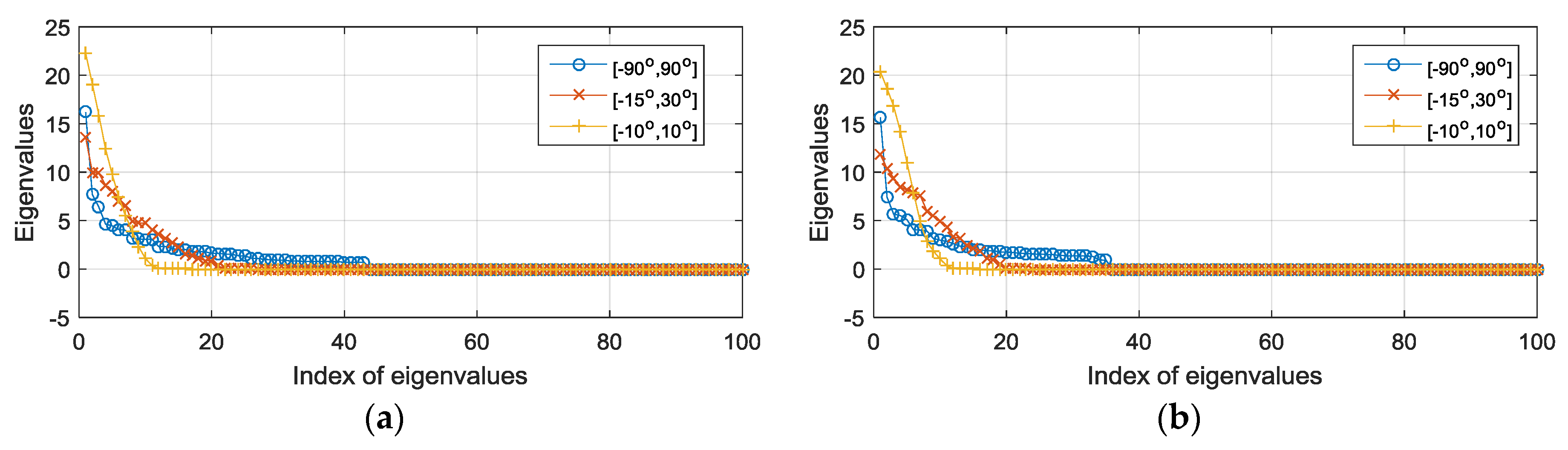
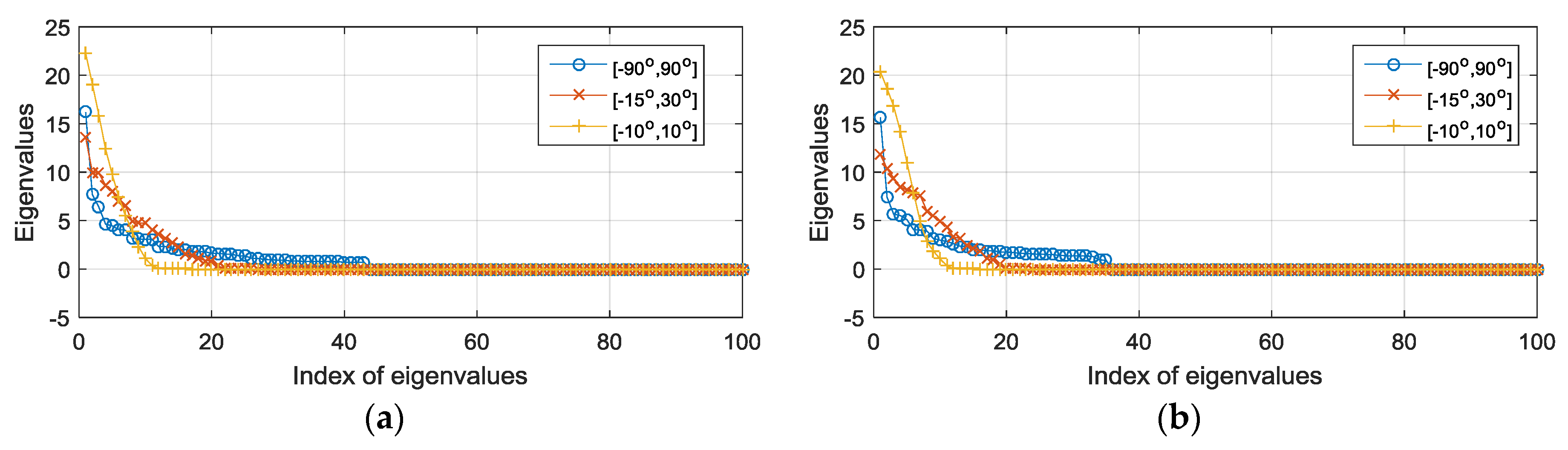
- The dimensions of the (conjugate) correlation subspaces need to be set carefully. When there is no prior knowledge of the sources, we set the angle interval to , the dimension of the correlation subspace is chosen as , and is set as the dimension of the conjugate correlation subspace. When we have prior knowledge of the sources, we can implement the eigenvalue decomposition (EVD) of the (conjugate) correlation subspace matrices, and the dimensions are set according to the numbers of the resultant positive eigenvalues.
- The proposed coarray interpolation algorithms are not only suitable for the coprime array, but are also suitable for other partial augmentable arrays as it satisfies the recovery condition of structured matrix completion revealed in [31].
- The correlation subspace matrix (23) and the conjugate correlation subspace matrix (24) cannot be calculated analytically due to the fact they are unintegrable with respect to . For a symmetric source interval , the following numerical approximations are used instead:where the number of discrete samples is set to in the simulation. Even though we use all possible spatial grids to construct the (conjugate) correlation subspaces, this doesn’t affect the fact that our algorithms can resolve gridless sources, which is the advantage over the sparsity-aware algorithms.
| Algorithm 1. The proposed improved coarray interpolation algorithms with cyclostationary signals. | |
| Input | The received signal vector , cyclic frequency , sources prior |
| Output | The optimized low-rank (conjugate) correlation matrix |
| Step 1 | Compute the sampling (conjugate) correlation matrix |
| Step 2 | Generate the transform matrix and reshape to get |
| Step 3 | Construct the (conjugate) correlation subspace or |
| Step 4 | Optimize (31) for the difference coarray or (32) for the sum coarray |
4. Simulation Results
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A
References
- Li, J.; Stoica, P. MIMO Radar Signal Processing; Wiley: Hoboken, NJ, USA, 2009. [Google Scholar]
- Haykin, S. Array Signal Processing; Prentice-Hall: Upper Saddle River, NJ, USA, 1984. [Google Scholar]
- Krim, H.; Viberg, M. Two decades of array signal processing research: The parametric approach. IEEE Signal Process. Mag. 1996, 13, 67–94. [Google Scholar] [CrossRef]
- Schmidt, R. Multiple emitter location and signal parameter estimation. IEEE Trans. Antennas Propag. 1986, 34, 276–280. [Google Scholar] [CrossRef]
- Roy, R.; Kailath, T. ESPRIT—Estimation of signal parameters via rotation invariance techniques. IEEE Trans. Acoust. Speech Signal Process. 1989, 17, 984–995. [Google Scholar] [CrossRef]
- Gardner, W.A. Cyclostationarity in Communications and Signal Processing; Wiley: Hoboken, NJ, USA, 1994. [Google Scholar]
- Gardner, W.A. Simplification of MUSIC and ESPRIT by exploitation of cyclostationarity. Proc. IEEE 1988, 76, 845–847. [Google Scholar] [CrossRef]
- Schell, S.V.; Calabretta, R.A.; Gardner, W.A.; Agee, B.G. Cyclic MUSIC algorithms for signal-selective direction estimation. In Proceedings of the 1989 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Glasgow, UK, 23–26 May 1989; pp. 2278–2281. [Google Scholar]
- Xu, G.; Kailath, T. Direction-of-arrival estimation via exploitation of cyclostationary-a combination of temporal and spatial processing. IEEE Trans. Signal Process. 1992, 40, 1775–1786. [Google Scholar] [CrossRef]
- Charge, P.; Wang, Y.; Saillard, J. An extended cyclic MUSIC algorithm. IEEE Trans. Signal Process. 2003, 51, 1695–1701. [Google Scholar] [CrossRef]
- Moffet, A. Minimum-redundancy linear arrays. IEEE Trans. Antennas Propag. 1968, 16, 172–175. [Google Scholar] [CrossRef]
- Gelli, G.; Izzo, L. Minimum-redundancy linear arrays for cyclostationarity-based source location. IEEE Trans. Signal Process. 1997, 45, 2605–2608. [Google Scholar] [CrossRef]
- Pal, P.; Vaidyanathan, P.P. Nested arrays: A novel approach to array processing with enhanced degrees of freedom. IEEE Trans. Signal Process. 2010, 58, 4167–4181. [Google Scholar] [CrossRef]
- Liu, C.L.; Vaidyanathan, P.P. Super nested arrays: Linear sparse arrays with reduced mutual coupling-part I: Fundamentals. IEEE Trans. Signal Process. 2016, 64, 3997–4012. [Google Scholar] [CrossRef]
- Vaidyanathan, P.P.; Pal, P. Sparse sensing with co-prime samplers and arrays. IEEE Trans. Signal Process. 2011, 59, 573–586. [Google Scholar] [CrossRef]
- Qin, S.; Zhang, Y.D.; Amin, M.G. Generalized coprime array configurations for direction-of-arrival estimation. IEEE Trans. Signal Process. 2015, 63, 1377–1390. [Google Scholar] [CrossRef]
- Abramovich, Y.I.; Spencer, N.K.; Gorokhov, A.Y. Positive-definite Toeplitz completion in DOA estimation for nonuniform linear antenna arrays. II. Partially augmentable arrays. IEEE Trans. Signal Process. 1999, 47, 1502–1521. [Google Scholar] [CrossRef]
- Zhou, C.; Gu, Y.; Zhang, Y.D.; Shi, Z.; Jin, T.; Wu, X. Compressive sensing based coprime array direction-of-arrival estimation. IET Commun. 2017, 11, 1719–1724. [Google Scholar] [CrossRef]
- Zhang, Y.D.; Moeness, G.A.; Braham, H. Sparsity-based DOA estimation using co-prime arrays. In Proceedings of the 2013 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Vancouver, BC, Canada, 26–31 May 2013; pp. 3967–3971. [Google Scholar]
- Liu, J.; Lu, Y.; Zhang, Y. DOA Estimation with enhanced DOFs by exploiting cyclostationarity. IEEE Trans. Signal Process. 2017, 65, 1486–1496. [Google Scholar] [CrossRef]
- Chi, Y.; Scharf, L.L.; Pezeshki, A. Sensitivity to Basis Mismatch in Compressed Sensing. IEEE Trans. Signal Process. 2011, 59, 2182–2195. [Google Scholar] [CrossRef]
- Wang, M.; Nehorai, A. Coarrays, MUSIC, and the Cramér Rao Bound. IEEE Trans. Signal Process. 2017, 65, 933–946. [Google Scholar] [CrossRef]
- Liu, C.L.; Vaidyanathan, P.P. Remarks on the spatial smoothing step in coarray MUSIC. IEEE Signal Process Lett. 2015, 22, 1438–1442. [Google Scholar] [CrossRef]
- Zhou, C.; Zhou, J. Direction-of-Arrival Estimation with Coarray ESPRIT for Coprime Array. Sensors 2017, 17, 1779. [Google Scholar] [CrossRef] [PubMed]
- Pal, P.; Vaidyanathan, P.P. A grid-less approach to underdetermined direction of arrival estimation via low rank matrix denoising. IEEE Signal Process Lett. 2014, 21, 737–741. [Google Scholar] [CrossRef]
- Liu, C.L.; Vaidyanathan, P.P.; Piya, P. Coprime coarray interpolation for DOA estimation via nuclear norm minimization. In Proceedings of the 2016 IEEE International Symposium on Circuits and Systems (ISCAS), Montreal, QC, Canada, 22–25 May 2016. [Google Scholar]
- Candès, E.J.; Recht, B. Exact matrix completion via convex optimization. Commun. ACM 2012, 55, 111–119. [Google Scholar] [CrossRef]
- Candès, E.J.; Tao, T. The power of convex relaxation: Near-optimal matrix completion. IEEE Trans. Inf. Theory 2010, 56, 2053–2080. [Google Scholar] [CrossRef]
- Guo, M.; Chen, T.; Wang, B. An improved DOA estimation approach using coarray interpolation and matrix denoising. Sensors 2017, 17, 1140. [Google Scholar] [CrossRef] [PubMed]
- Tao, C.; Muran, G.; Limin, G. A direct coarray interpolation approach for direction finding. Sensors 2017, 17, 2149. [Google Scholar] [CrossRef]
- Chen, Y.; Chi, Y. Robust Spectral Compressed Sensing via Structured Matrix Completion. IEEE Trans. Inf. Theory 2013, 60, 6576–6601. [Google Scholar] [CrossRef]
- Liu, C.L.; Vaidyanathan, P.P. Cram´er-Rao bounds for coprime and other sparse arrays, which find more sources than sensors. Digit. Signal Process. 2017, 61, 43–61. [Google Scholar] [CrossRef]
- Romero, D.; Ariananda, D.D.; Tian, Z.; Leus, G. Compressive covariance sensing: Structure-based compressive sensing beyond sparsity. IEEE Signal Process. Mag. 2016, 33, 78–93. [Google Scholar] [CrossRef]
- Delikaris, S.; Vilkamo, J.; Pulkki, V. Signal-Dependent Spatial Filtering Based on Weighted-Orthogonal Beamformers in the Spherical Harmonic Domain. IEEE/ACM Trans. Audio Speech Lang. Process. 2017, 24, 1511–1523. [Google Scholar] [CrossRef]
- Rahmani, M.; Atia, G.K. A subspace method for array covariance matrix estimation. In Proceedings of the 2016 IEEE Sensor Array and Multichannel Signal Processing Workshop (SAM), Rio de Janerio, Brazil, 10–13 July 2016. [Google Scholar]
- Liu, C.L.; Vaidyanathan, P.P. Correlation Subspaces: Generalizations and Connection to Difference Coarrays. IEEE Trans. Signal Process. 2017, 65, 5006–5020. [Google Scholar] [CrossRef]
- Horn, R.A.; Johnson, C.R. Matrix Analysis; Cambridge University Press: Cambridge, UK, 1985. [Google Scholar]
- Grant, M.; Boyd, S. CVX: MATLAB Software for Disciplined Convex Programming, Version 2.1. March 2014. Available online: http://cvxr.com/cvx (accessed on 14 January 2018).
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, J.; Shen, F. Improved Coarray Interpolation Algorithms with Additional Orthogonal Constraint for Cyclostationary Signals. Sensors 2018, 18, 219. https://doi.org/10.3390/s18010219
Song J, Shen F. Improved Coarray Interpolation Algorithms with Additional Orthogonal Constraint for Cyclostationary Signals. Sensors. 2018; 18(1):219. https://doi.org/10.3390/s18010219
Chicago/Turabian StyleSong, Jinyang, and Feng Shen. 2018. "Improved Coarray Interpolation Algorithms with Additional Orthogonal Constraint for Cyclostationary Signals" Sensors 18, no. 1: 219. https://doi.org/10.3390/s18010219
APA StyleSong, J., & Shen, F. (2018). Improved Coarray Interpolation Algorithms with Additional Orthogonal Constraint for Cyclostationary Signals. Sensors, 18(1), 219. https://doi.org/10.3390/s18010219