Measuring Liquid-Level Utilizing Wedge Wave


Abstract
1. Introduction
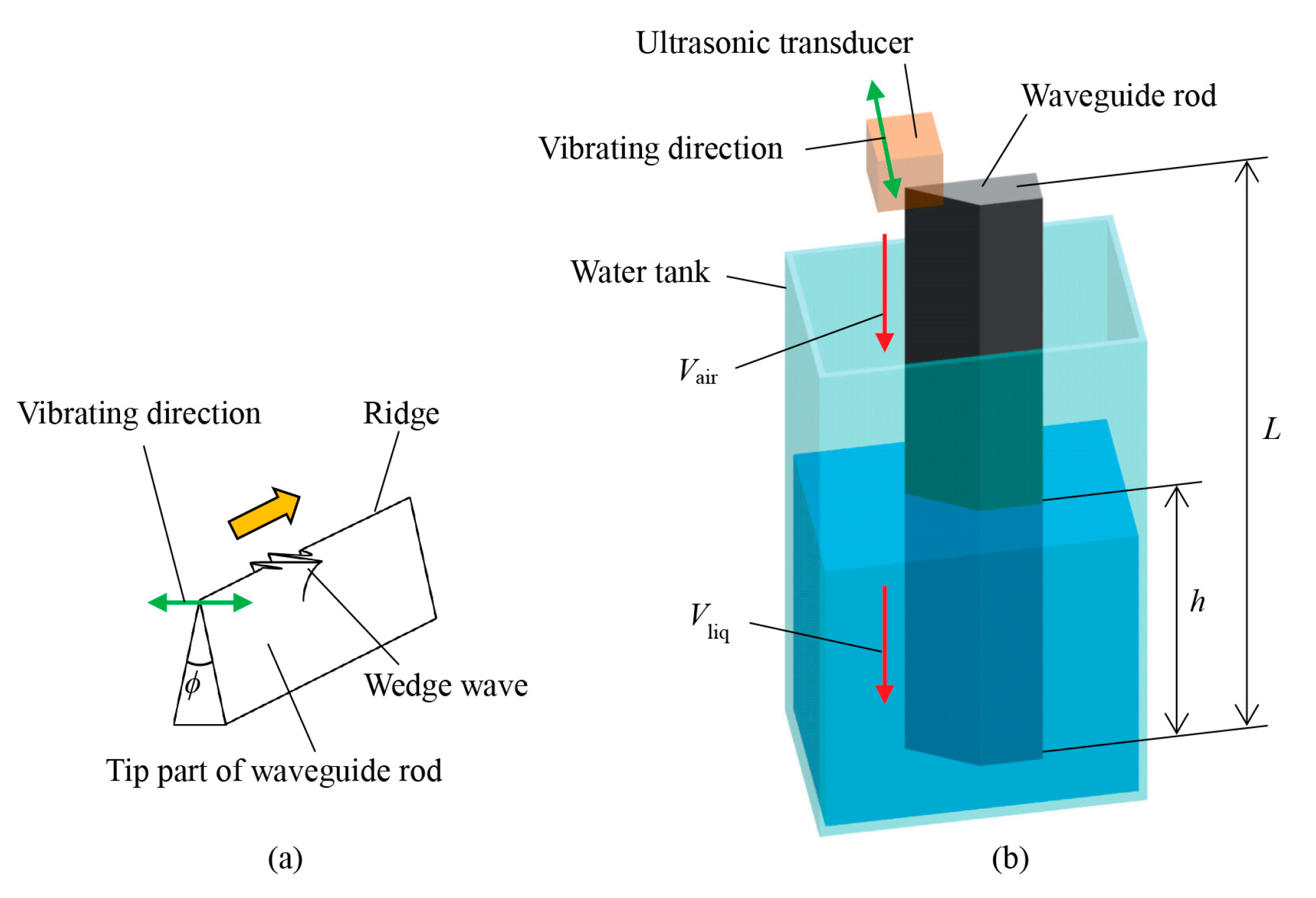
2. Measurement Theory
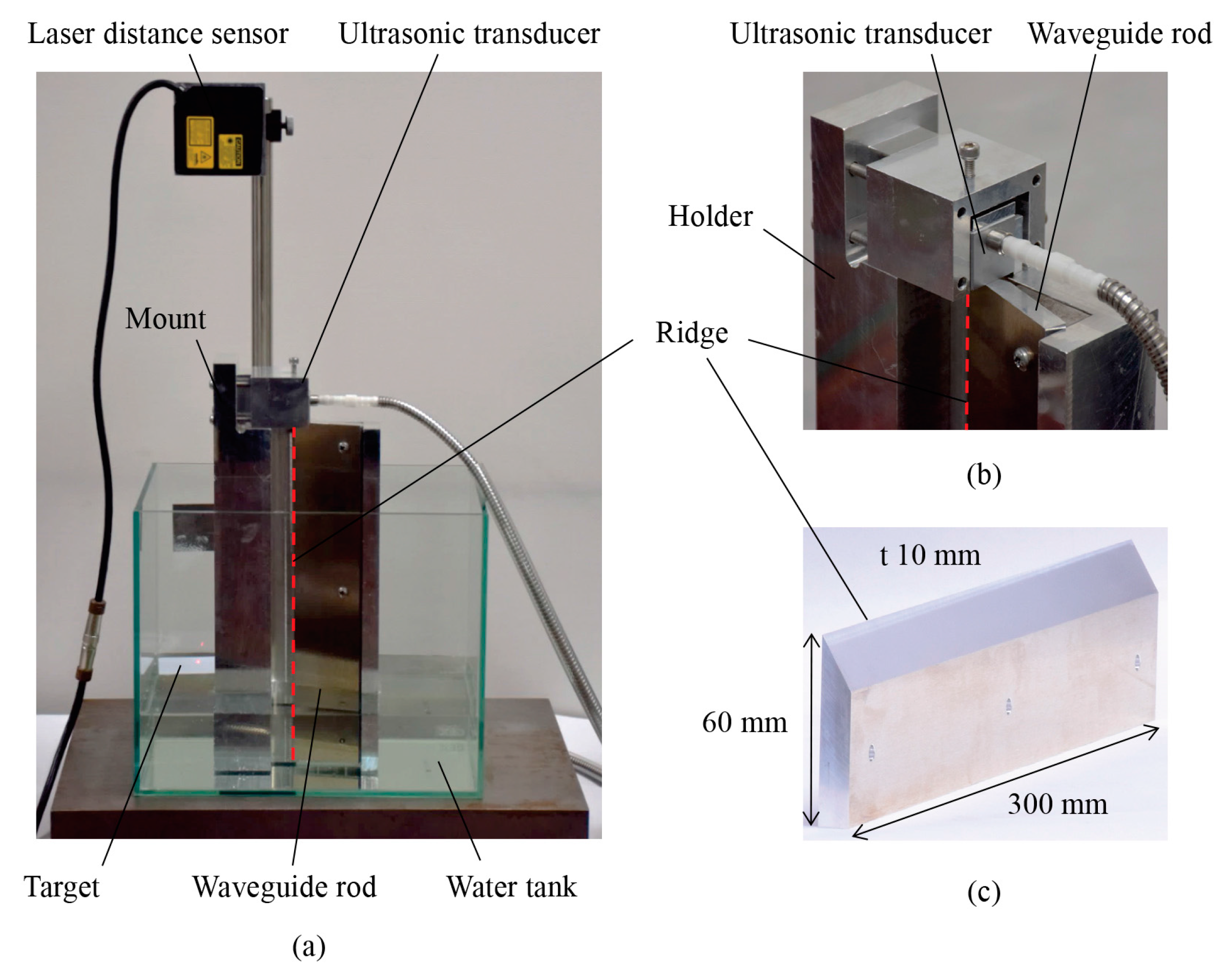
3. Experiments
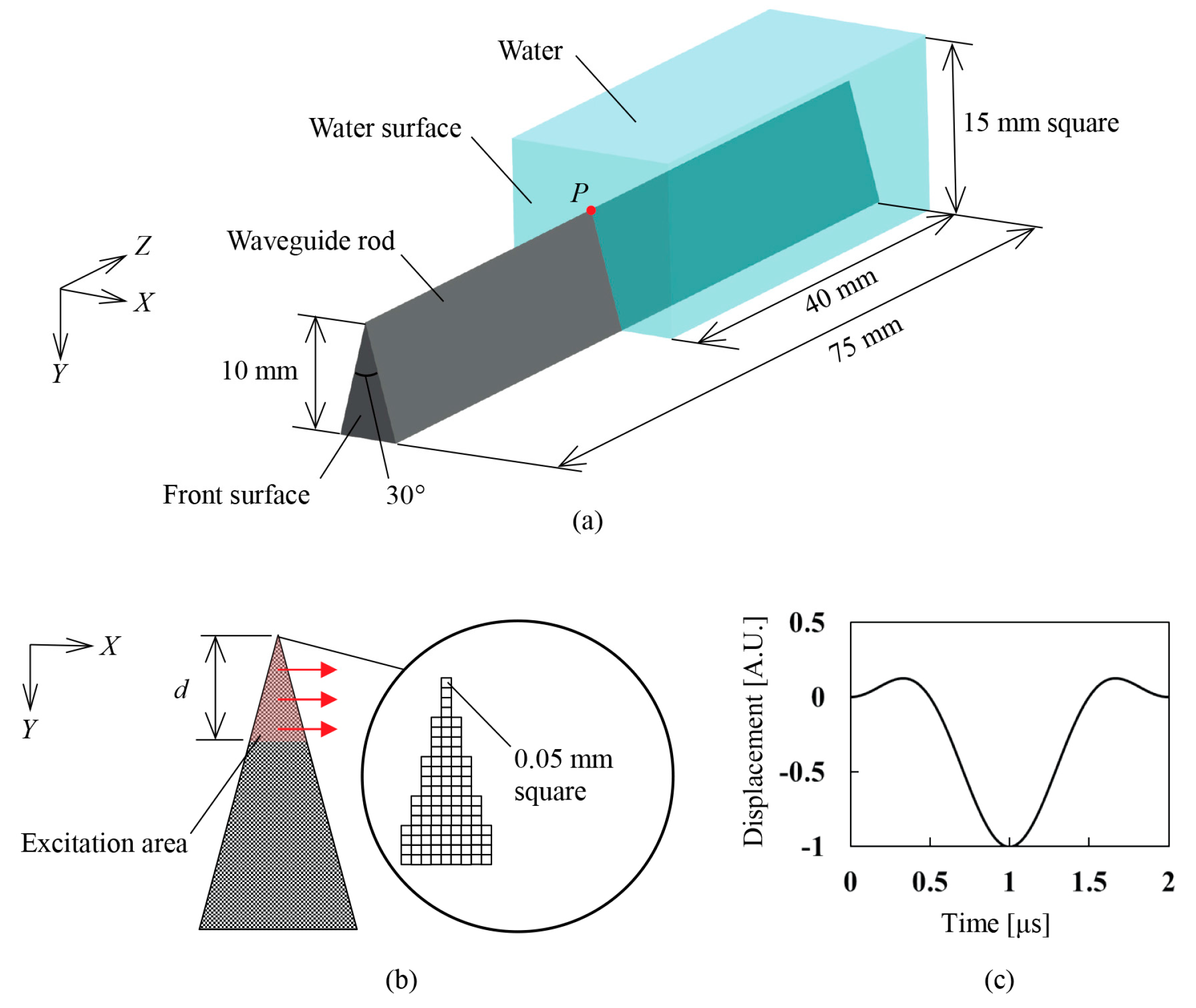
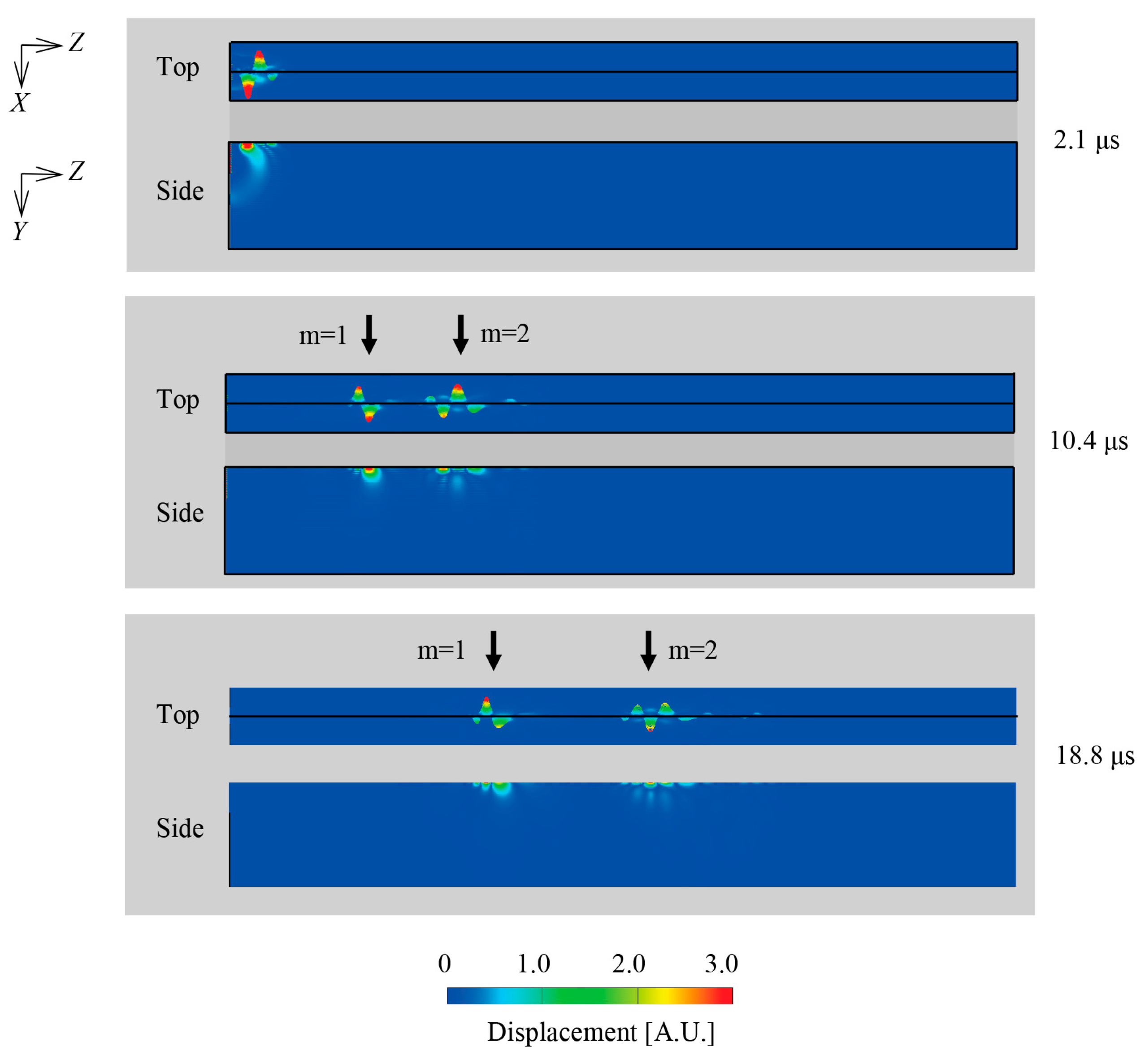
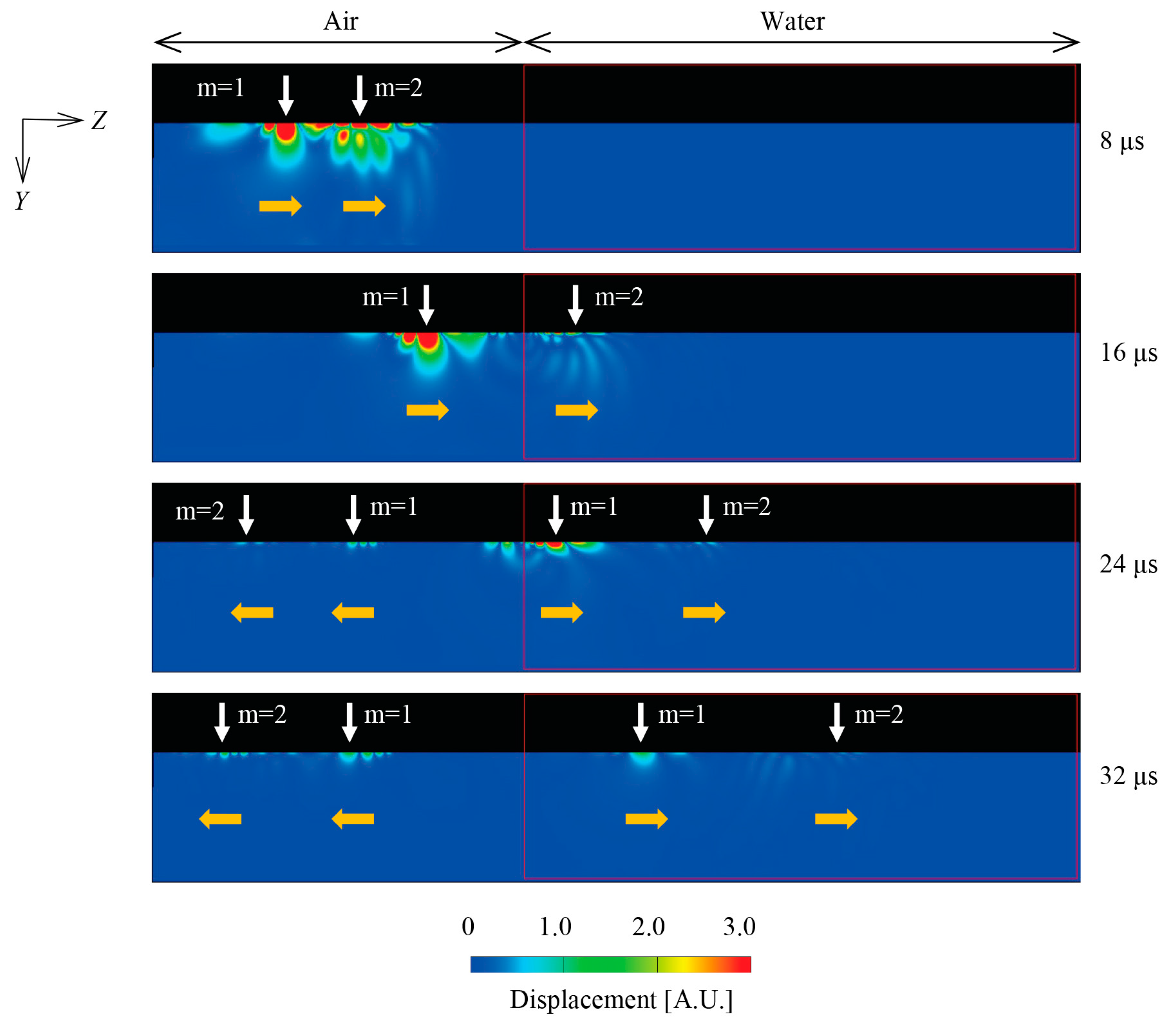
3.1. Numerical Simulation
3.2. Measurement of Liquid-Level
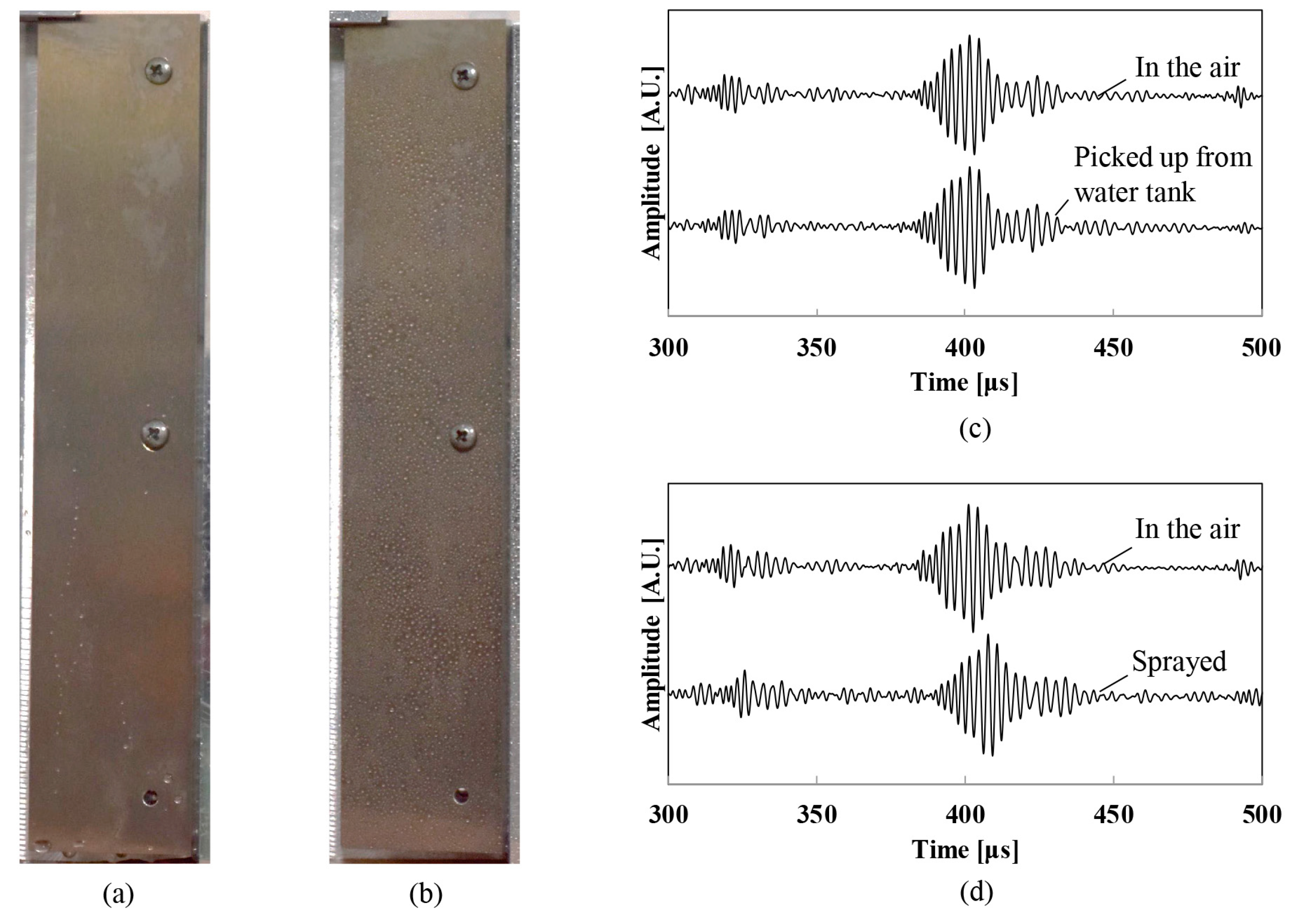
3.3. Effect of Wet Surface
4. Results and Discussion
4.1. Numerical Simulation
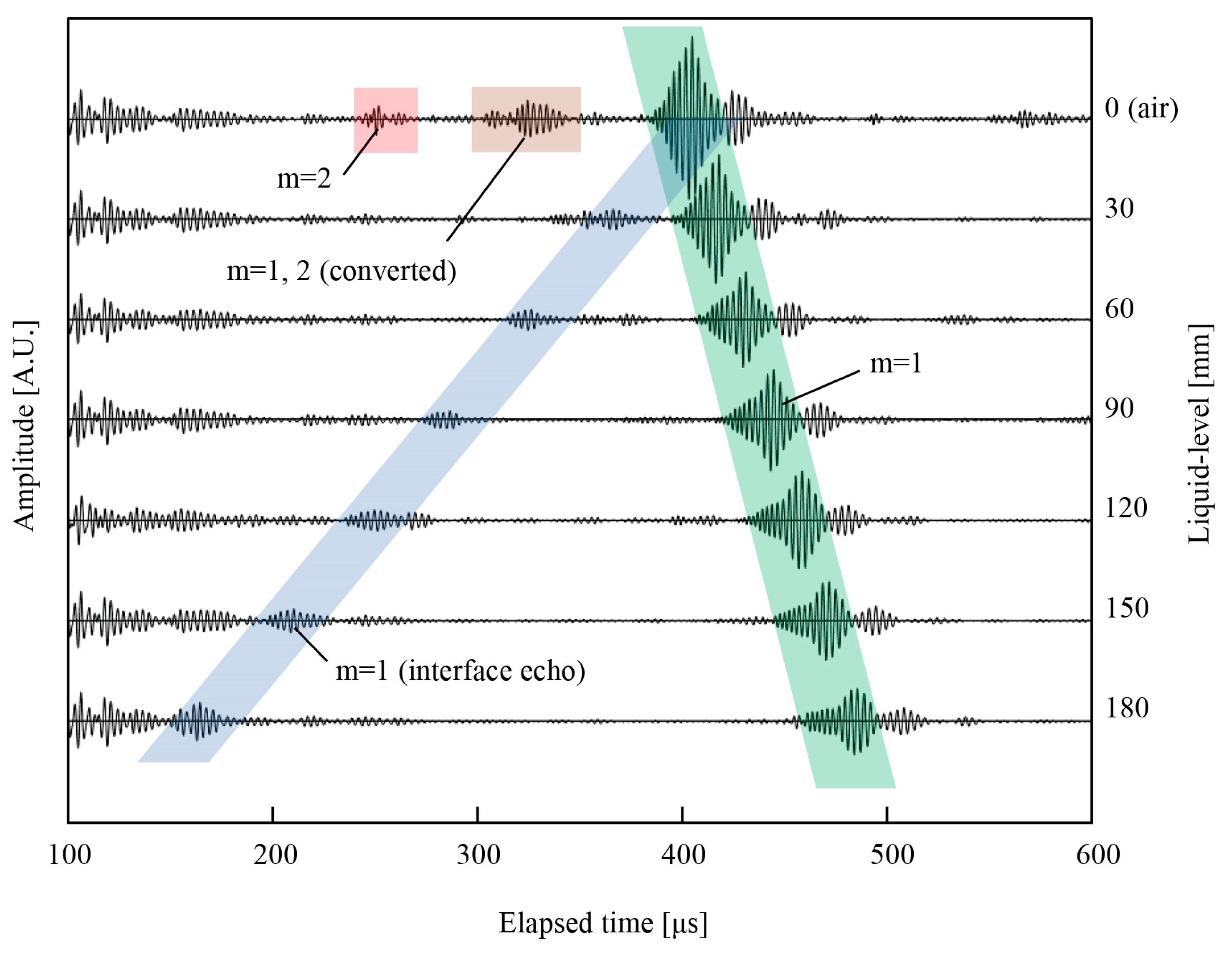
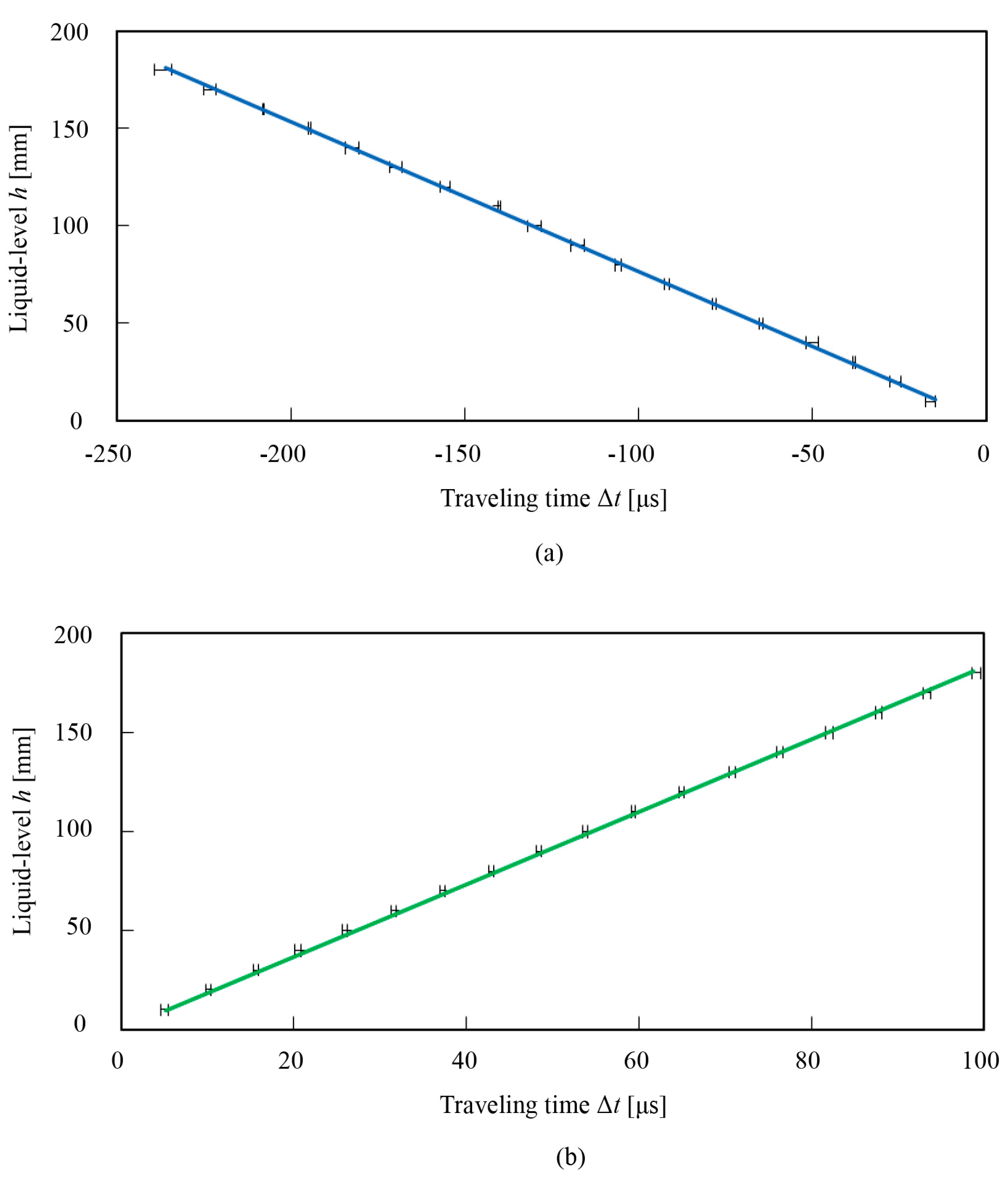
4.2. Measurement of Liquid-Level
4.3. Effect of Wet Surface
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Sheng, H.J.; Liu, W.E.; Bor, S.S.; Chang, H.C. Fiber-Liquid-Level Sensor Based on a Fiber Bragg Grating. Jpn. J. Appl. Phys. 2008, 47, 2141–2143. [Google Scholar] [CrossRef]
- Takiguchi, K.; Kawate, Y.; Shigi, T. Improved Ta Level Indicator for Liquid He. Jpn. J. Appl. Phys. 1970, 9, 547–551. [Google Scholar] [CrossRef]
- Yamada, K.; Honda, H.; Horiuchi, S.; Kinai, T. Liquid-Level Sensing by Trapped-Energy-Mode Thickness Vibration. Jpn. J. Appl. Phys. 2009, 48, 07GB08. [Google Scholar] [CrossRef]
- Freeman, J.D. Capacitance Fuel Measurement for Automotive Applications. In Proceedings of the Automotive Engineering Congress and Exposition, Detroit, MI, USA, 25–29 February 1980; pp. 51–57. [Google Scholar]
- Liu, B.; Wang, D.Y.; Wang, A. Liquid-Surface-Level Sensing Based on Transverse Pulse Train Technique. IEEE Sens. J. 2016, 16, 2317–2321. [Google Scholar] [CrossRef]
- Pelczar, C.; Meiners, M.; Gould, D.; Lang, W.; Benecke, W. Contactless Liquid Level Sensing using Wave Damping Phenomena in Free-Space. In Proceedings of the TRANSDUCERS 2007—2007 International Solid-State Sensors, Actuators and Microsystems Conference, Lyon, France, 10–14 June 2007; pp. 2353–2356. [Google Scholar]
- Jin, B.; Liu, X.; Bai, Q.; Wang, D.; Wang, Y. Design and Implementation of an Intrinsically Safe Liquid-Level Sensor Using Coaxial Cable. Sensors 2015, 15, 12615–12636. [Google Scholar] [CrossRef] [PubMed]
- Chakraborty, S.; Bera, S.K.; Mandal, N.; Bera, S.C. Study on Further Modification of Non-Contact Capacitance Type-Level Transducer for a Conducting Liquid. IEEE Sens. J. 2015, 15, 6678–6688. [Google Scholar] [CrossRef]
- Musayev, E.; Karlik, S.E. A Novel Liquid Level Detection Method and its Implementation. Sens. Actuators A Phys. 2003, 109, 21–24. [Google Scholar] [CrossRef]
- Mesquita, E.; Paixãob, T.; Antunesc, P.; Coelhod, F.; Ferreirae, P.; Andréf, P.; Varumaa, H. Groundwater Level Monitoring using a Plastic Optical Fiber. Sens. Actuators A Phys. 2016, 240, 138–144. [Google Scholar] [CrossRef]
- Xiaowei, D.; Ruifeng, Z. Detection of Liquid-Level Variation using a Side-polished Fiber Bragg Grating. Opt. Laser Technol. 2010, 42, 214–218. [Google Scholar] [CrossRef]
- Peng, G.; He, J.; Yang, S.; Zhou, W. Application of the Fiber-Optic Distributed Temperature Sensing for Monitoring the Liquid Level of Producing Oil Wells. Measurement 2014, 58, 130–137. [Google Scholar] [CrossRef]
- Ran, Y.; Xia, L.; Niu, D.; Wen, Y.; Yu, C.; Liu, D. Design and Demonstration of a Liquid Level Fiber Sensor Based on Self-Imaging Effect. Sens. Actuators A Phys. 2016, 237, 41–46. [Google Scholar] [CrossRef]
- Nemarich, C.P. Time Domain Reflectometry Liquid Level Sensors. IEEE Instrum. Meas. Mag. 2001, 4, 40–44. [Google Scholar] [CrossRef]
- Li, P.; Cai, Y.; Shen, X.; Nabuzaale, S.; Yin, J.; Li, J. An Accurate Detection for Dynamic Liquid Level Based on MIMO Ultrasonic Transducer Array. IEEE Trans. Instrum. Meas. 2015, 64, 582–595. [Google Scholar]
- Vagas, E.; Ceres, R.; Martin, J.M.; Calderon, L. Ultrasonic Sensor for Liquid-level Inspection in Bottles. Sens. Actuators A Phys. 1997, 61, 256–259. [Google Scholar] [CrossRef]
- Zhang, B.; Wei, Y.J.; Liu, W.Y.; Zhang, Y.J.; Yao, Z.; Zhang, L.; Xiong, J.J. A Novel Ultrasonic Method for Liquid Level Measurement Based on the Balance of Echo Energy. Sensors 2017, 17, 706. [Google Scholar] [CrossRef] [PubMed]
- Nakamura, H.; Kondo, M.; Kukita, Y. Simultaneous Measurement of Liquid Velocity and Interface Profiles of Horizontal Duct Wavy Flow by Ultrasonic Velocity Profile Meter. Nucl. Eng. Des. 1998, 184, 339–348. [Google Scholar] [CrossRef]
- Gillespie, A.B.; Deighton, M.O.; Pike, R.B.; Watkins, R.D. A New Ultrasonic Technique for the Measurement of Liquid Level. Ultrasonics 1982, 20, 13–17. [Google Scholar] [CrossRef]
- Rogers, S.C.; Miller, G.N. Ultrasonic Level, Temperature and Density Sensor. IEEE Trans. Nucl. Sci. 1982, 29, 665–668. [Google Scholar] [CrossRef]
- Kim, J.O.; Bau, H.H.; Liu, Y.; Lynnworth, S.A.; Hall, K.A.; Jacobson, S.A.; Korba, J.A.; Murphy, R.J.; Strauch, M.A.; King, K.G. Torsional Sensor Applications in Two-phase Fluids. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 1993, 40, 563–576. [Google Scholar] [CrossRef] [PubMed]
- Spratt, W.K.; Vetelino, J.F. Torsional Acoustic Waveguide Sensor for Temperature and Liquid Level. In Proceedings of the IEEE Frequency Control Symposium, 2009 Joint with the 22nd European Frequency and Time Forum, Besancon, France, 20–24 April 2009; pp. 850–854. [Google Scholar]
- Lagasse, P.E.; Mason, I.M.; Ash, E.A. Acoustic Surface Waveguides—Analysis and Assessment. IEEE Trans. Microw. Theory Tech. 1973, 21, 225–236. [Google Scholar] [CrossRef]
- Jia, J.; Shen, Z.; Yuan, L.; Ni, X. Experimental and Numerical Study of Mode Transformation and Energy Attenuation of Wedge Waves Generated by Laser Ultrasound Technique. Jpn. J. Appl. Phys. 2012, 51, 022703. [Google Scholar] [CrossRef]
- Pupyrev, P.D.; Lomonosov, A.M.; Mayer, A.P. Laser-generated Ultrasonic Pulse Shapes at Solid Wedges. Ultrasonics 2016, 70, 75–83. [Google Scholar] [CrossRef] [PubMed]
- Jia, J.; Wang, L.J.; Shen, Z.H.; Yuan, L.; Ni, X.W. Study on Mode Transformation and Energy Attenuation of Wedge Waves with Different Apex Angles by Laser Ultrasonic Techniques. Sci. China Phys. Mechatron. Astron. 2012, 55, 593–598. [Google Scholar] [CrossRef]
- Vaart, H.V.; Schissler, L.R. Acoustic Surface-Wave Recirculating Memory. IEEE Trans. Microw. Theory Tech. 1973, 21, 236–243. [Google Scholar] [CrossRef]
- Yang, C.H.; Tsai, K.Y. Characterization of Broadband Dispersion Behaviors of Wedge Waves using Laser Ultrasound Technique. Jpn. J. Appl. Phys. 2004, 43, 4392–4393. [Google Scholar] [CrossRef]
- Sokolova, E.S.; Kovalev, A.S.; Timler, R.; Mayer, A.P. On the Dispersion of Wedge Acoustic Waves. Wave Motion 2013, 50, 233–245. [Google Scholar] [CrossRef]
- Krylov, V.V. On the Velocities of Localized Vibration Modes in Immersed Solid Wedges. J. Acoust. Soc. Am. 1998, 103, 767–770. [Google Scholar] [CrossRef]
- Hennion, A.C.H.; Langlet, P. Finite Element Analysis of the Propagation of Acoustic Waves along Waveguides Immersed in Water. J. Sound Vib. 1997, 200, 519–530. [Google Scholar] [CrossRef]
- Chamuel, J.R. Review of Progress in Quantitative Nondestructive Evaluation; Springer: Boston, MA, USA, 1997; p. 129. [Google Scholar]
- Lagasse, P.E. Analysis of a Dispersionfree Guide for Elastic Waves. Electron. Lett. 1972, 8, 372–373. [Google Scholar] [CrossRef]
- Billy, M. Acoustic Technique Applied to the Measurement of the Free Edge Wave Velocity. Ultrasonics 1996, 34, 611–619. [Google Scholar] [CrossRef]
- Romaszko, M.; Sapinski, B.; Sioma, A. Forced Vibrations Analysis of a Cantilever Beam using the Vision Method. J. Theor. Appl. Mech. 2015, 53, 243–254. [Google Scholar] [CrossRef]
- Guide to the Expression of Uncertainty in Measurement; International Organization for Standardization (ISO): Geneva, Switzerland, 1995.
- Uncertainty of Measurement—Part 3: Guide to the Expression of Uncertainty in Measurement (GUM:1995); ISO/IEC GUIDE 98-3:2008; International Electrotechnical Commission (IEC): Geneva, Switzerland, 2008.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vair (m/s) | Vliq (m/s) | ||||
|---|---|---|---|---|---|
| Simulation | Experiment | Equation (1) | Simulation | Experiment | |
| Mode 1 | 1424 | 1528 | 1470 | 962.6 | 1076 |
| Mode 2 | 2330 | 2441 | 2546 | 1441 | 1263 |
| Sensitivity of Interface Echo Method (mm/μs) | Sensitivity of End Echo Method (mm/μs) | |||
|---|---|---|---|---|
| Simulation | Experiment | Simulation | Experiment | |
| Mode 1 | −0.712 | −0.764 | 1.485 | 1.818 |
| Mode 2 | −1.165 | −1.220 | 1.888 | 1.309 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Matsuya, I.; Honma, Y.; Mori, M.; Ihara, I. Measuring Liquid-Level Utilizing Wedge Wave. Sensors 2018, 18, 2. https://doi.org/10.3390/s18010002
Matsuya I, Honma Y, Mori M, Ihara I. Measuring Liquid-Level Utilizing Wedge Wave. Sensors. 2018; 18(1):2. https://doi.org/10.3390/s18010002
Chicago/Turabian StyleMatsuya, Iwao, Yudai Honma, Masayuki Mori, and Ikuo Ihara. 2018. "Measuring Liquid-Level Utilizing Wedge Wave" Sensors 18, no. 1: 2. https://doi.org/10.3390/s18010002
APA StyleMatsuya, I., Honma, Y., Mori, M., & Ihara, I. (2018). Measuring Liquid-Level Utilizing Wedge Wave. Sensors, 18(1), 2. https://doi.org/10.3390/s18010002